Индикатор для использования при хирургической операции
Формула / Реферат
1. Индикатор для использования при хирургической операции для определения первого угла в первой плоскости и второго угла во второй плоскости, при этом данный индикатор содержит корпус и отвес, закрепленный на упомянутом корпусе так, чтобы провешиваться под действием локального гравитационного поля, причем упомянутый отвес установлен с возможностью поворота относительно упомянутого корпуса как в упомянутой первой плоскости, так и в упомянутой второй плоскости, чтобы определять упомянутый первый угол и упомянутый второй угол соответственно.
2. Индикатор по п.1, в котором универсальный шарнир закрепляет упомянутый отвес с возможностью поворота на упомянутом корпусе.
3. Индикатор по п.2, в котором упомянутый универсальный шарнир представляет собой любой шарнир из
сферического шарнира;
одноосно-точечного шарнирного сочленения;
шарнирного сочленения с серьгой;
шарнирного сочленения наконечника соединительной тяги или
розеточного шарнирного сочленения.
4. Индикатор по любому из предшествующих пунктов, в котором упомянутая первая плоскость ортогональна упомянутой второй плоскости.
5. Индикатор по любому из предшествующих пунктов, в котором упомянутый отвес содержит указатель.
6. Индикатор по п.5, в котором упомянутый корпус содержит маркировочные знаки, расположенные вблизи упомянутого указателя.
7. Индикатор по п.6, в котором первый поднабор упомянутых маркировочных знаков соответствует угловым интервалам упомянутого первого угла и второй поднабор упомянутых маркировочных знаков соответствует угловым интервалам упомянутого второго угла.
8. Индикатор по любому из предшествующих пунктов, дополнительно содержащий соединитель, расположенный на упомянутом корпусе для присоединения упомянутого индикатора к протезному компоненту.
9. Индикатор по любому из предшествующих пунктов, дополнительно содержащий соединитель, расположенный на упомянутом корпусе для присоединения упомянутого индикатора к заданному месту пациента.
10. Индикатор по любому из предшествующих пунктов, в котором упомянутая хирургическая операция представляет собой вставку протеза для вертлужной впадины в рассверленную вертлужную впадину во время оперативного вмешательства по замещению тазобедренного сустава.
11. Индикатор по п.10, в котором упомянутый первый угол соответствует отвороту упомянутого протеза для вертлужной впадины относительно рассверленной вертлужной впадины.
12. Индикатор по п.10 или 11, в котором упомянутый второй угол соответствует отведению упомянутого протеза для вертлужной впадины относительно рассверленной вертлужной впадины.
13. Индикатор по любому из предшествующих пунктов, в котором перемещение отвеса относительно корпуса демпфируется.
14. Индикатор для использования при хирургической операции для определения первого угла в первой плоскости и второго угла во второй плоскости, при этом данный индикатор содержит
корпус,
первый отвес, закрепленный на упомянутом корпусе так, чтобы провешиваться под действием локального гравитационного поля, причем упомянутый первый отвес установлен с возможностью поворота относительно упомянутого корпуса в упомянутой первой плоскости, чтобы определять упомянутый первый угол, и
второй отвес, закрепленный на упомянутом корпусе так, чтобы провешиваться под действием локального гравитационного поля, причем упомянутый второй отвес установлен с возможностью поворота относительно упомянутого корпуса в упомянутой второй плоскости, чтобы определять упомянутый второй угол.
15. Индикатор по п.14, в котором упомянутый первый отвес закреплен на упомянутом корпусе для поворота относительно первой оси и второй отвес закреплен на упомянутом корпусе для поворота относительно второй оси, при этом упомянутая первая ось ортогональна упомянутой второй оси.

Текст
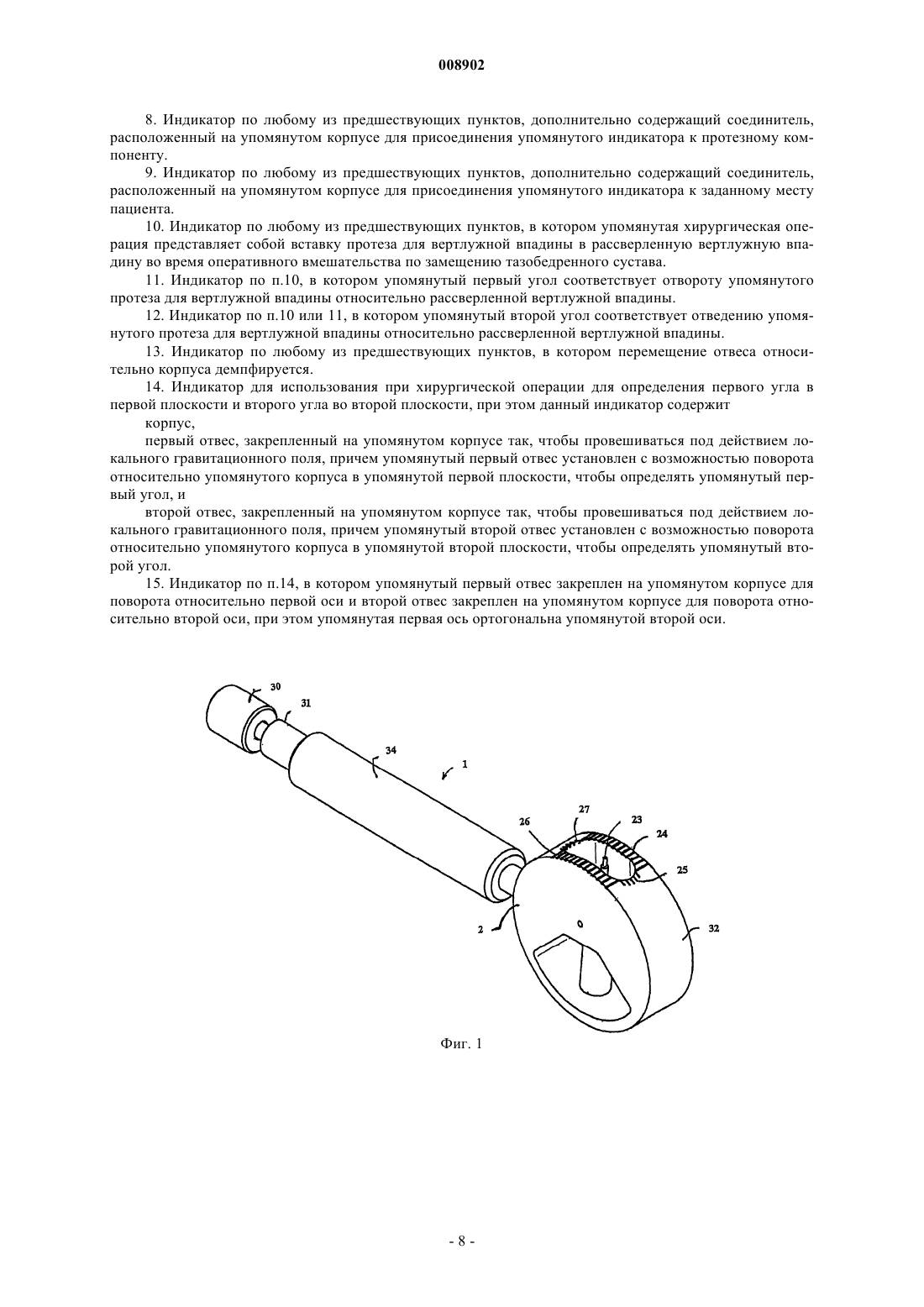
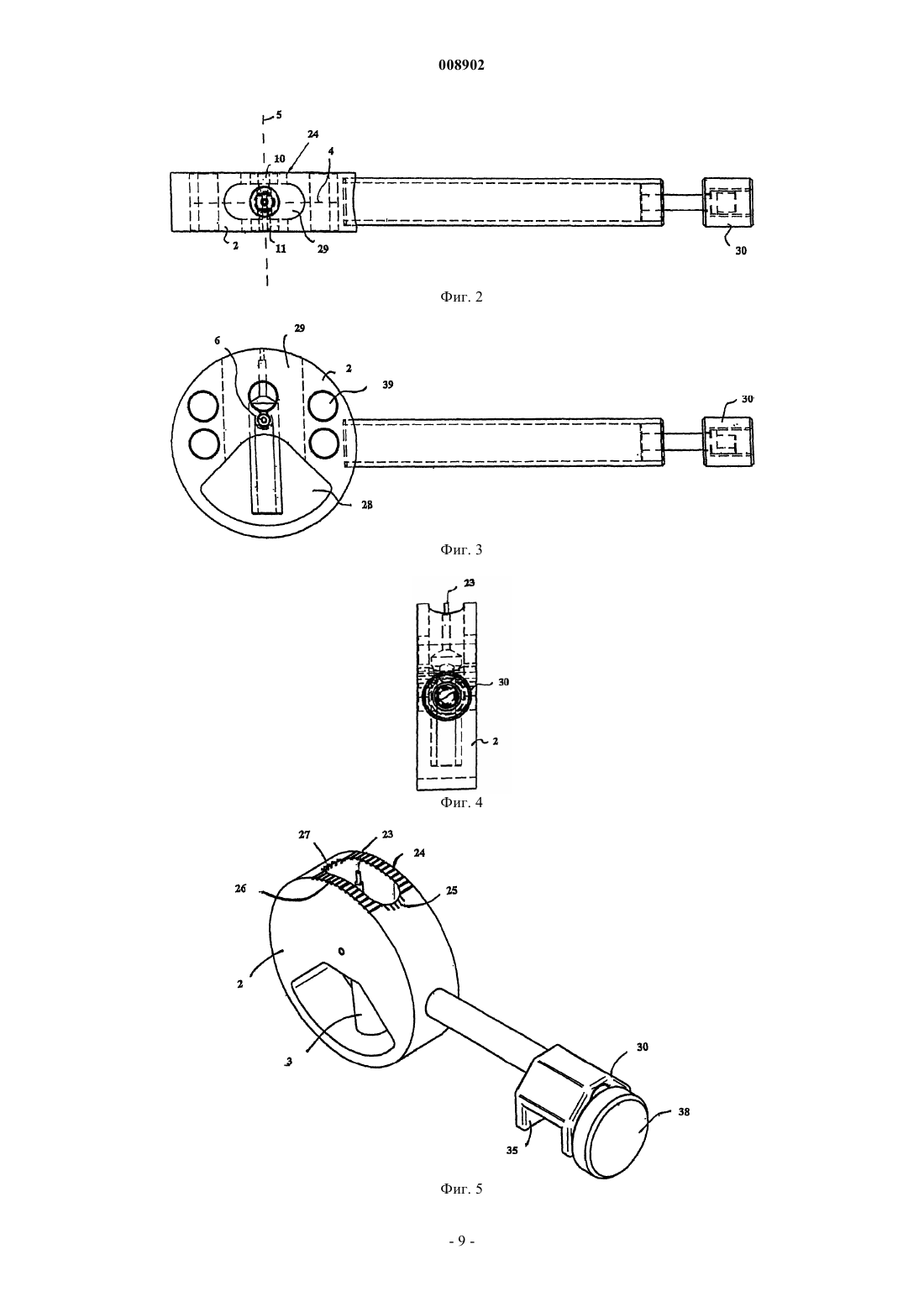
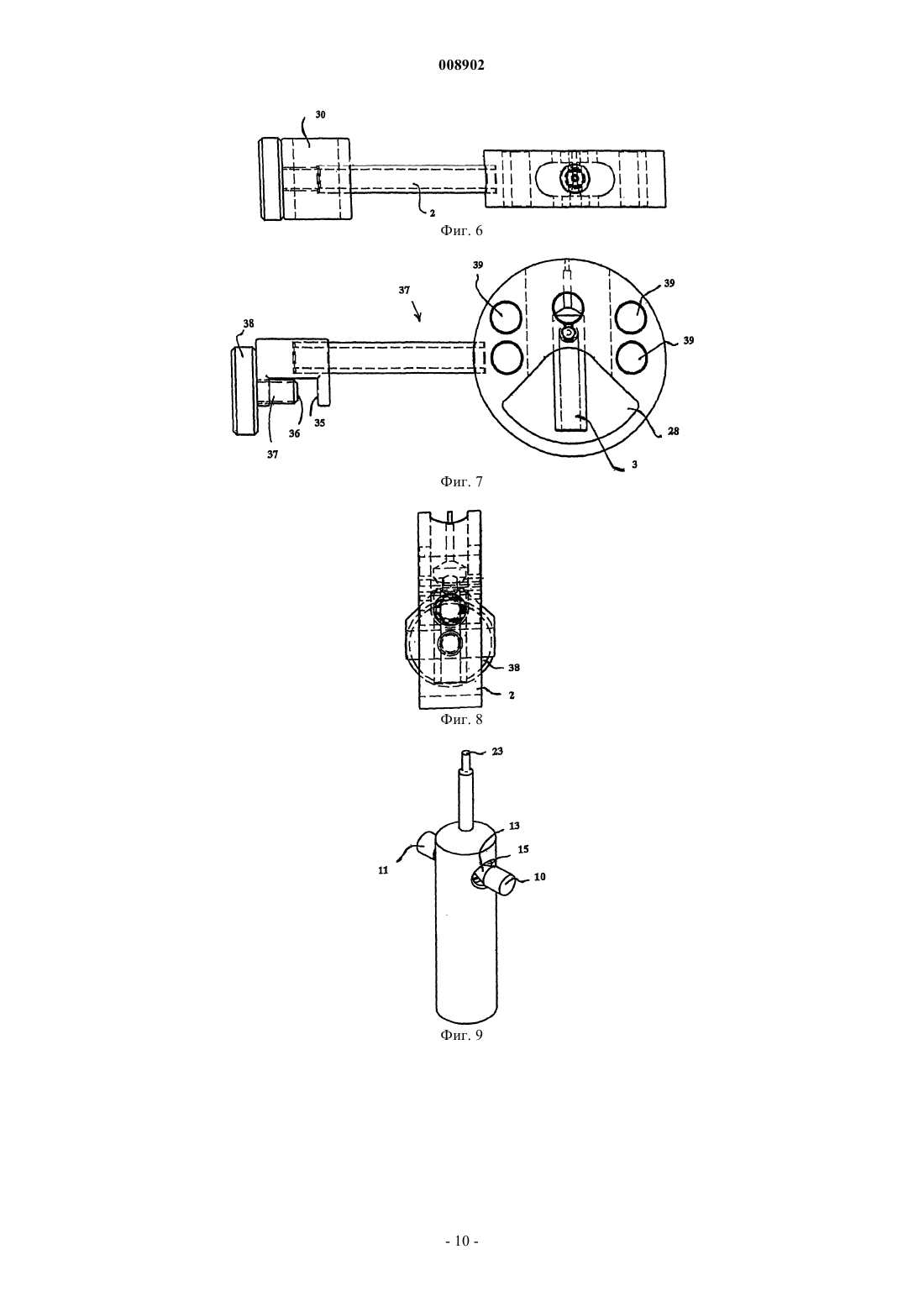
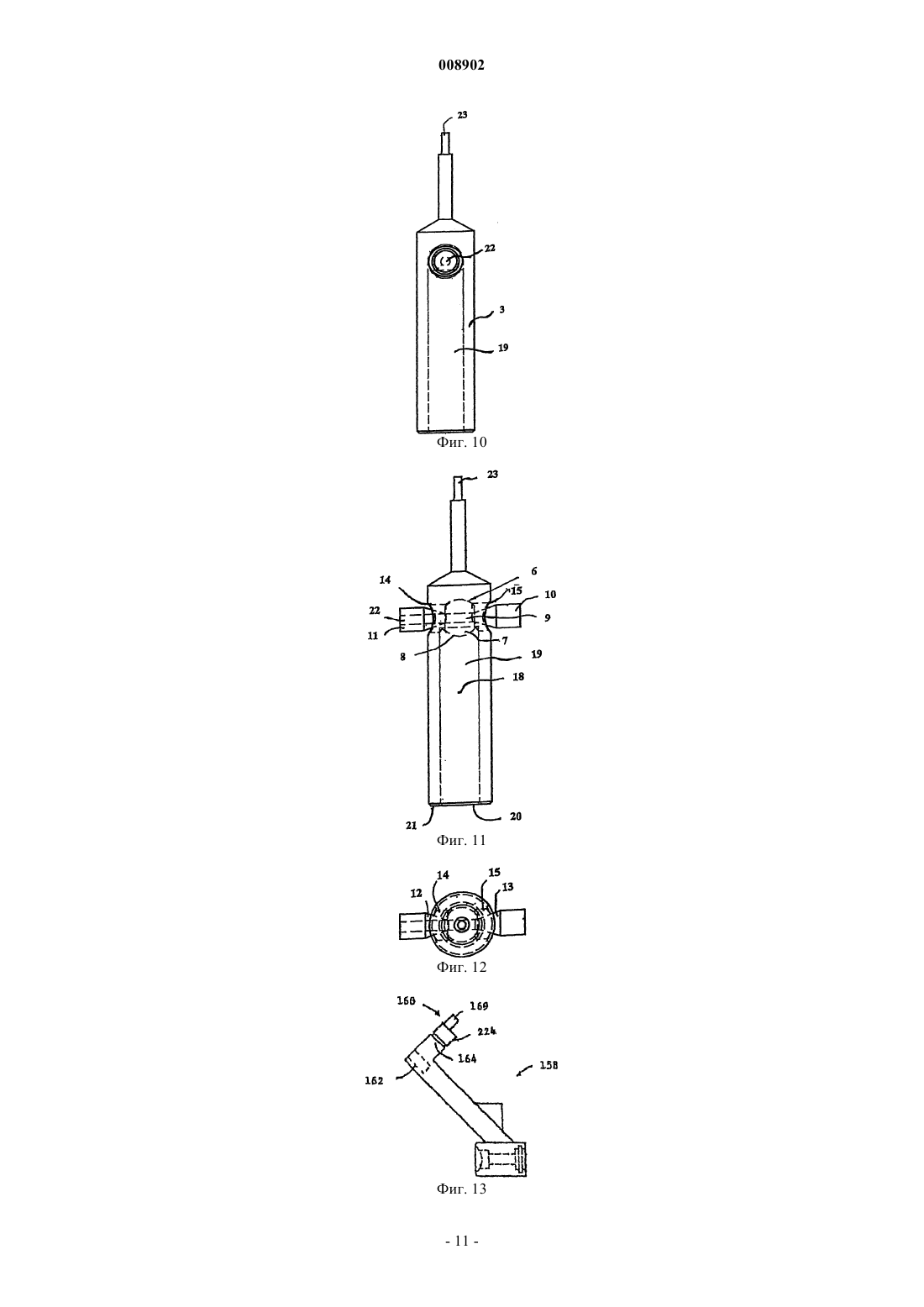
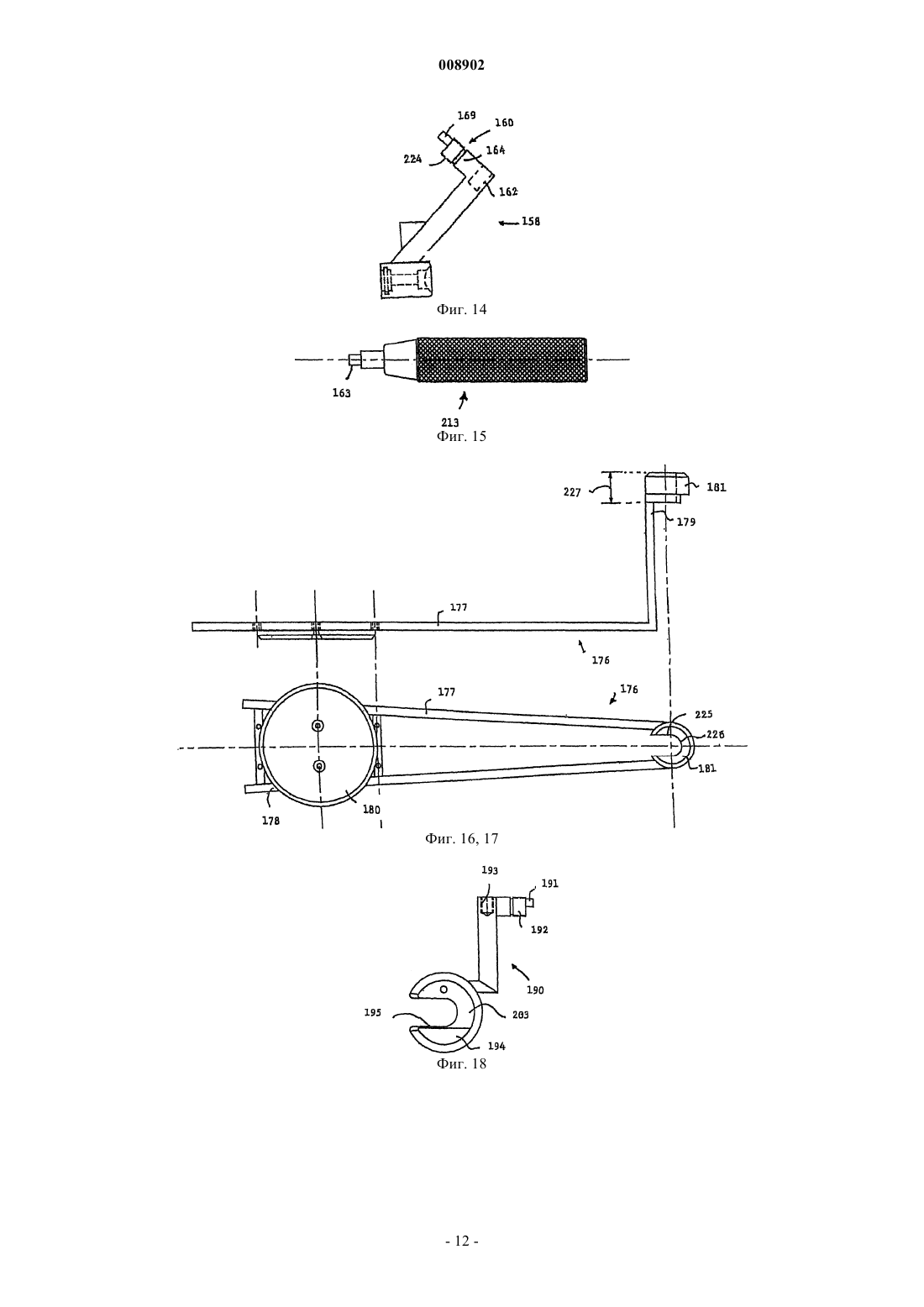
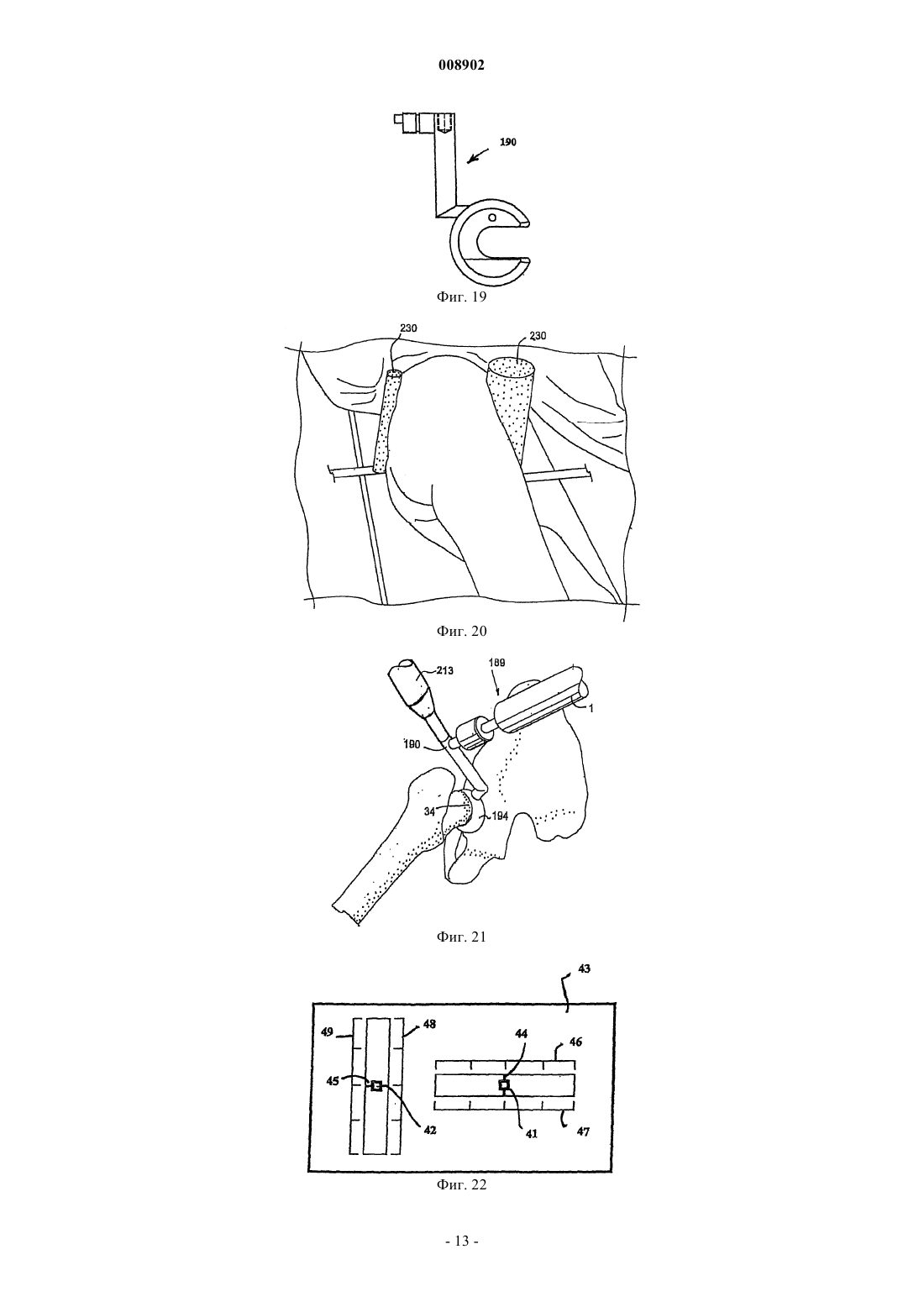
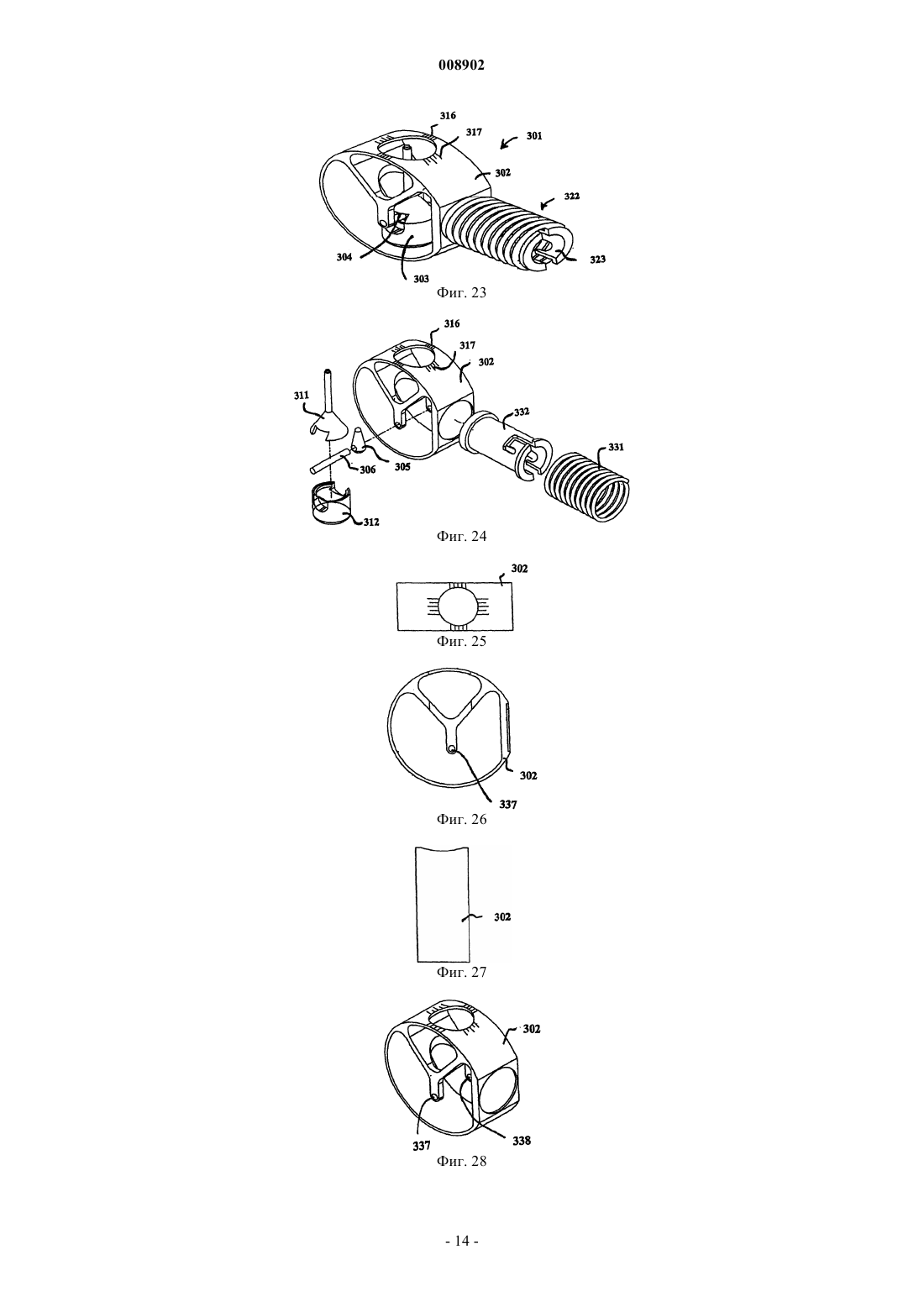
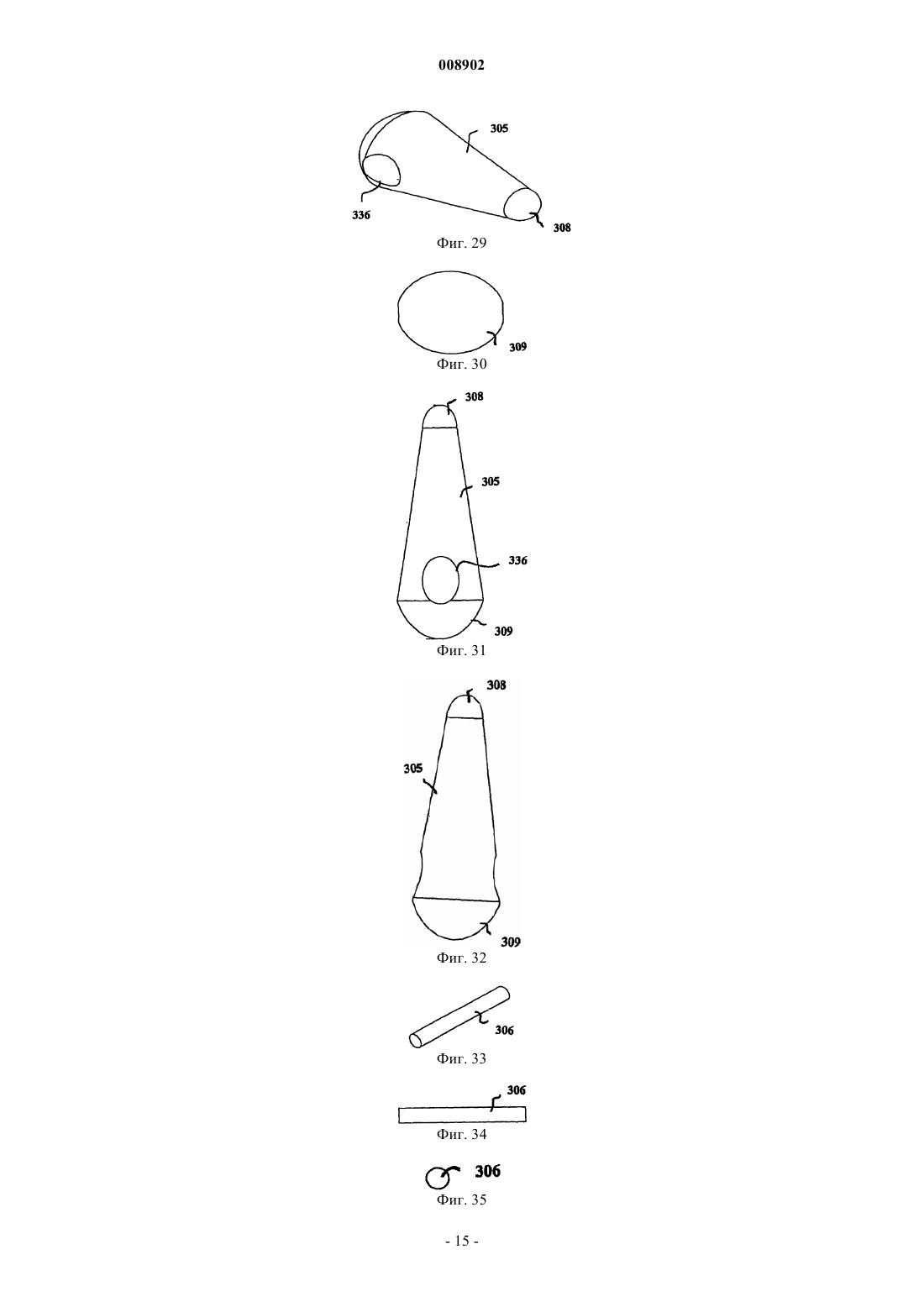
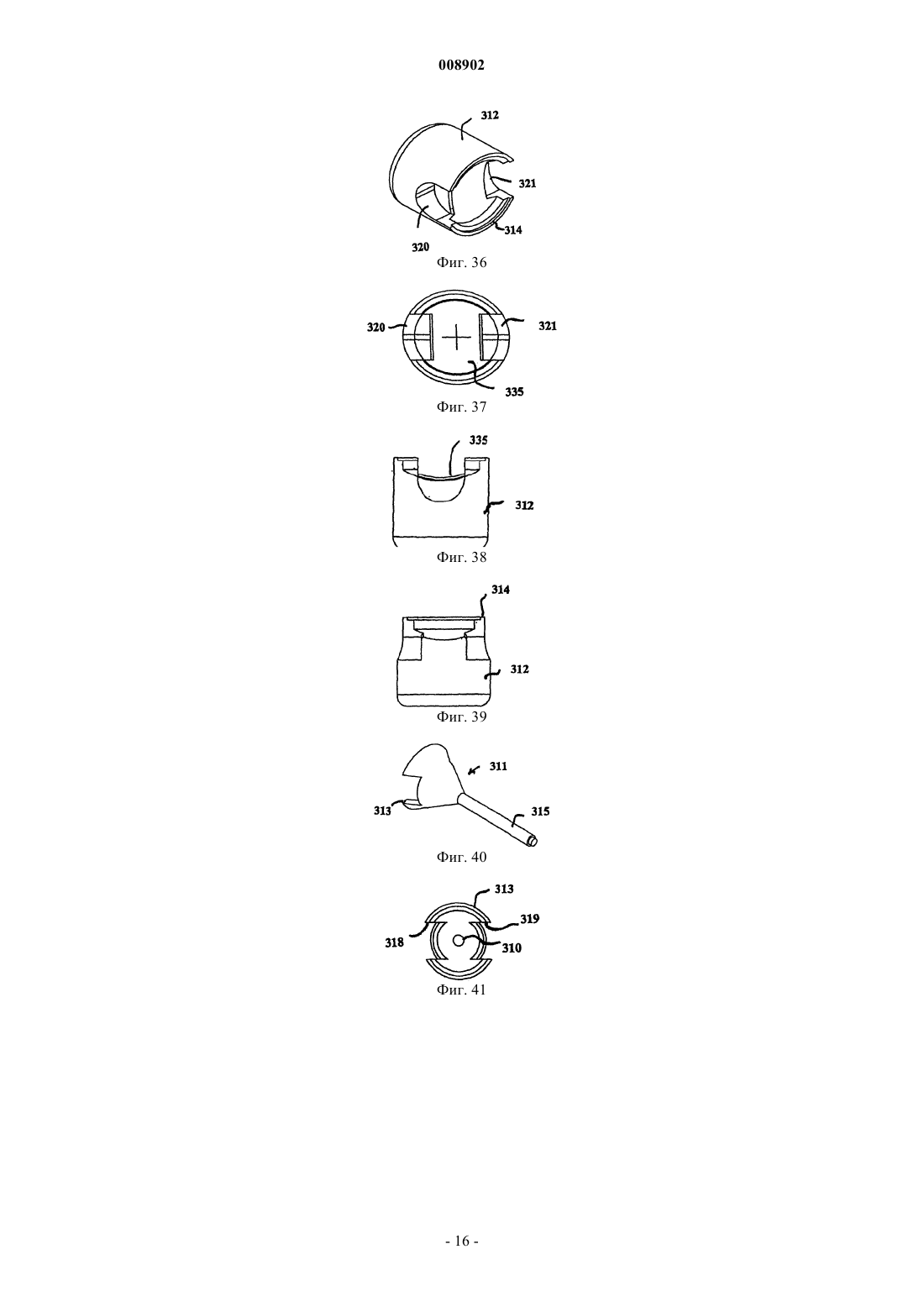
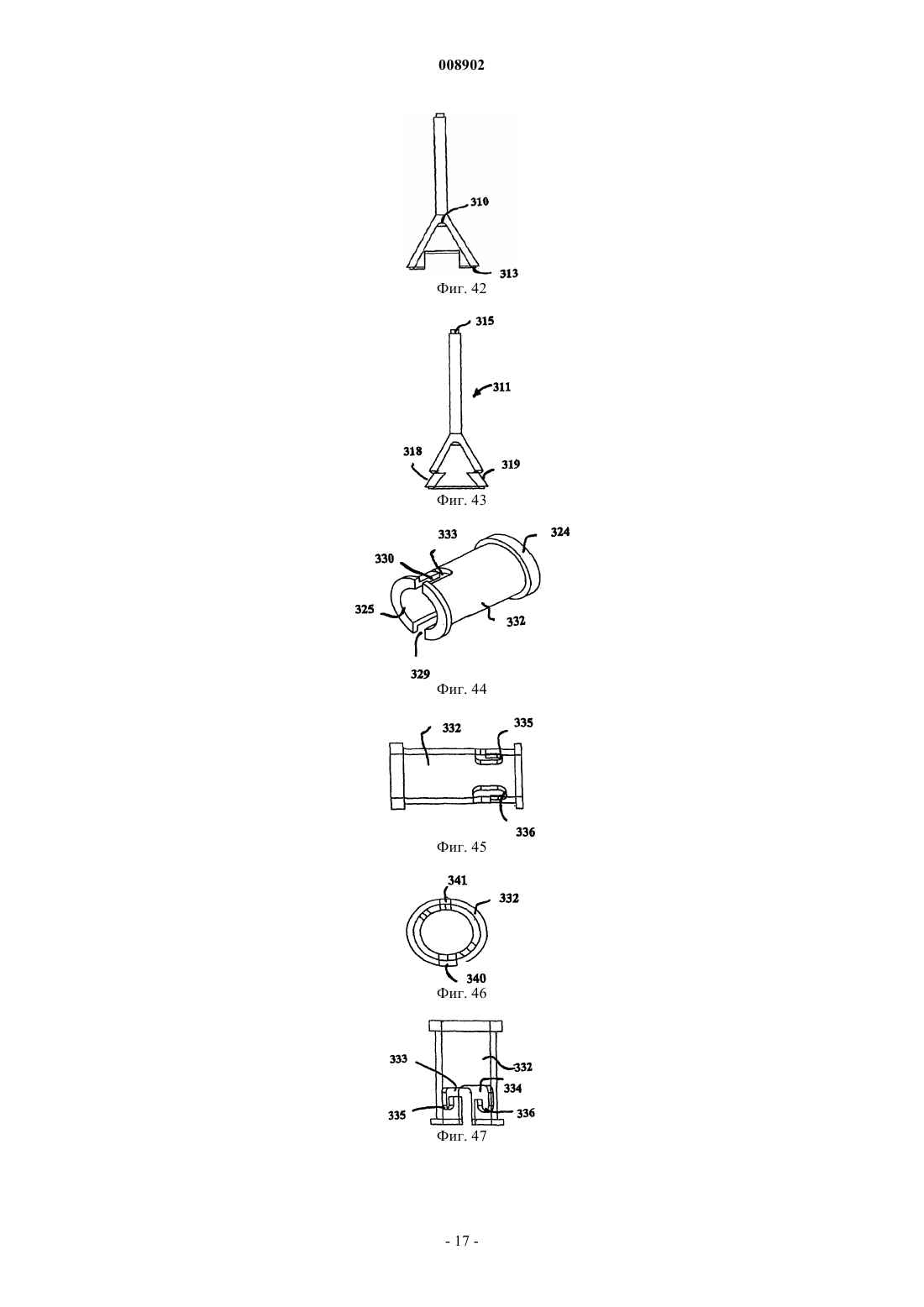
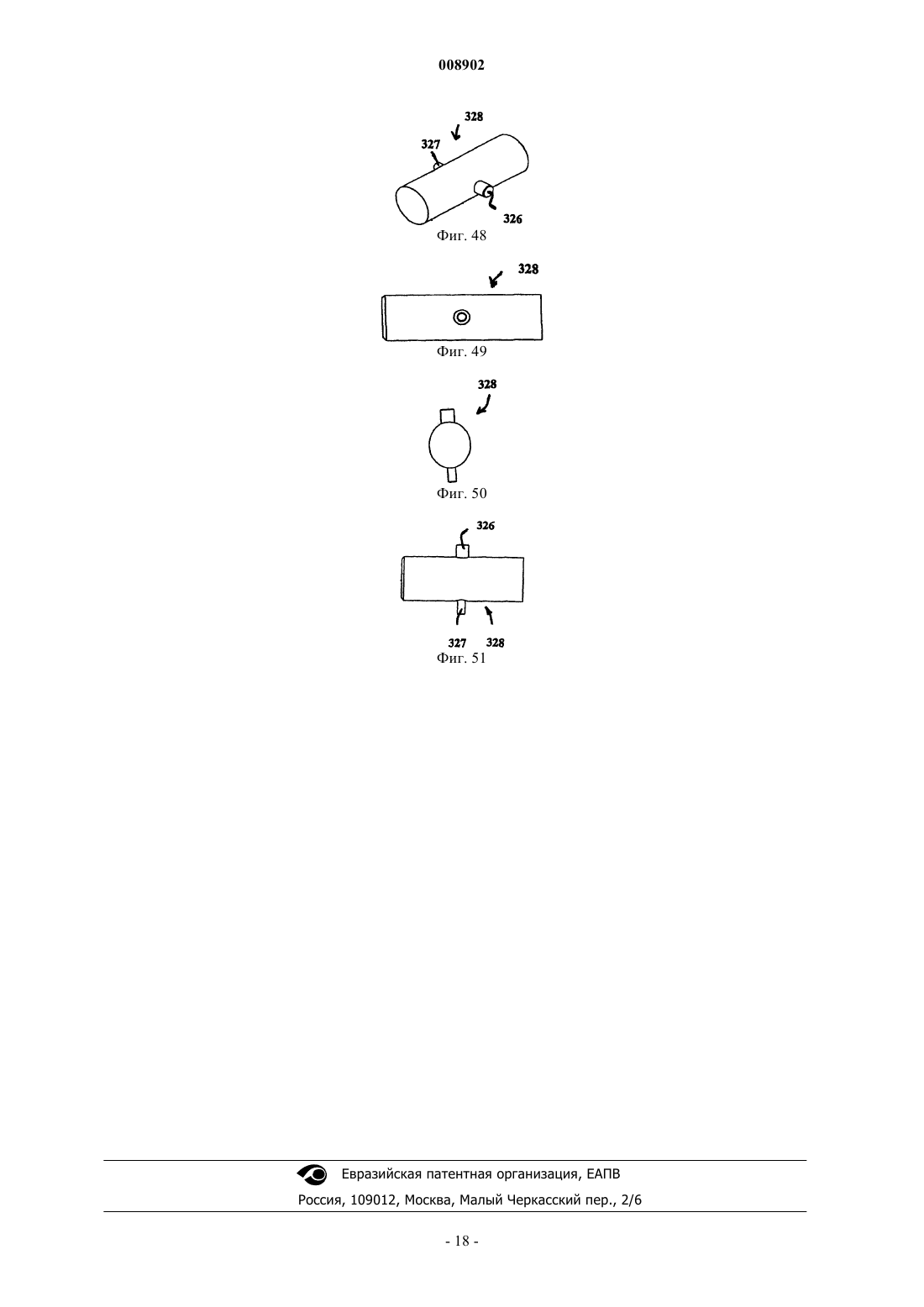
008902 Область техники, к которой относится изобретение Настоящее изобретение относится к хирургическим приспособлениям и хирургическим способам и,в частности, к индикатору для использования при хирургических операциях, например в хирургии с применением протезных компонентов. Первоначально изобретение создано для применения при имплантации протезных компонентов в хирургии с остеотомией на людях или животных, например, в связи с операцией по замещению тазобедренного сустава и т.п. Однако очевидно, что изобретение не ограничено данной конкретной областью применения. Обзор состояния техники Известные технологии имплантации протезов обычно требовали, чтобы хирург совмещал протезные компоненты визуально. Использование данной известной технологии операций по замещению тазобедренного сустава, например, может привести к неточному совмещению таких протезных компонентов,как ножки протезов для тазобедренного сустава и протезы для вертлужной впадины. Упомянутое неточное совмещение может привести к послеоперационным осложнениям, например неправильному положению ноги, неточной длине ноги и/или неправильному напряжению мягких тканей. Долговременные последствия неточного совмещения протезных компонентов могут также включать в себя ускоренный износ компонентов, асептическое расшатывание компонентов и риск преждевременного повтора хирургического вмешательства. Некоторые из перечисленных проблем предлагается, по меньшей мере, частично решить по схеме,описанной в одновременно рассматриваемой заявке на патентPCT/AU02/01482 (WO 03/037192), содержание которой целиком включено в настоящее описание путем ссылки. Настоящее описание патента касается использования ручки для совмещения, показанной на фиг. 20-24 и 36. Данная ручка для совмещения содержит индикатор, предназначенный для указания, имеет ли протезный компонент заданную ориентацию. Данная ручка для совмещения, при наличии существенного преимущества над предшествующим уровнем техники, тем не менее, характеризуется некоторыми ограничениями. Любое обсуждение предшествующего уровня техники в описании нельзя считать признанием, что предшествующий уровень техники широко известен или составляет часть общеизвестной информации в данной области техники. Сущность изобретения В соответствии с первым аспектом изобретения предлагается индикатор для использования при хирургической операции для определения первого угла в первой плоскости и второго угла во второй плоскости, при этом данный индикатор содержит корпус и отвес, закрепленный на упомянутом корпусе так,чтобы провешиваться под действием локального гравитационного поля, причем упомянутый отвес установлен с возможностью поворота относительно упомянутого корпуса как в упомянутой первой плоскости, так и в упомянутой второй плоскости, чтобы определять упомянутый первый угол и упомянутый второй угол, соответственно. В предпочтительном варианте универсальный шарнир закрепляет отвес с возможностью поворота на корпусе. В предпочтительном варианте осуществления универсальный шарнир представляет собой сферический шарнир, однако, очевидно, что в альтернативных предпочтительных вариантах осуществления можно использовать такие универсальные шарниры других типов, как, например, шарнирное сочленение с серьгой, одноосно-точечное шарнирное сочленение, шарнирное сочленение наконечника соединительной тяги или розеточное шарнирное сочленение. В предпочтительном варианте первая плоскость ортогональна второй плоскости. Отвес в соответствии с предпочтительным вариантом осуществления содержит указатель, корпус предпочтительно содержит маркировочные знаки, расположенные вблизи указателя. В более предпочтительном варианте первый поднабор маркировочных знаков соответствует угловым интервалам первого угла, и второй поднабор маркировочных знаков соответствует угловым интервалам второго угла. Предпочтительный вариант осуществления изобретения содержит соединитель, расположенный на корпусе для присоединения индикатора к протезному компоненту. Альтернативный вариант осуществления содержит соединитель, расположенный на корпусе для присоединения индикатора к заданному месту пациента. Предпочтительный вариант осуществления пригоден, в частности, для таких хирургических применений, как вставка протеза для вертлужной впадины в рассверленную вертлужную впадину во время оперативного вмешательства по замещению тазобедренного сустава. Для данного применения первый угол предпочтительно соответствует отвороту протеза для вертлужной впадины, и второй угол предпочтительно соответствует отведению протеза для вертлужной впадины. В соответствии со вторым аспектом изобретения предлагается индикатор для использования при хирургической операции для определения первого угла в первой плоскости и второго угла во второй плоскости, при этом данный индикатор содержит корпус; первый отвес, закрепленный на упомянутом корпусе так, чтобы провешиваться под действием ло-1 008902 кального гравитационного поля, причем упомянутый первый отвес установлен с возможностью поворота относительно упомянутого корпуса в упомянутой первой плоскости, чтобы определять упомянутый первый угол; и второй отвес, закрепленный на упомянутом корпусе так, чтобы провешиваться под действием локального гравитационного поля, причем упомянутый второй отвес установлен с возможностью поворота относительно упомянутого корпуса в упомянутой второй плоскости, чтобы определять упомянутый второй угол. В предпочтительном варианте первый отвес закреплен на корпусе для поворота относительно первой оси, и второй отвес закреплен на корпусе для поворота относительно второй оси, при этом первая ось ортогональна второй оси. Ниже, только для примера, приведено описание предпочтительного варианта осуществления со ссылками на прилагаемые чертежи, на которых фиг. 1 - вид в перспективе первого предпочтительного варианта осуществления изобретения; фиг. 2 - вид в плане первого варианта осуществления; фиг. 3 - вид сбоку первого варианта осуществления; фиг. 4 - вид сзади первого варианта осуществления; фиг. 5 - вид в перспективе второго предпочтительного варианта осуществления изобретения; фиг. 6 - вид в плане второго варианта осуществления; фиг. 7 - вид сбоку второго варианта осуществления; фиг. 8 - вид сзади второго варианта осуществления; фиг. 9 - вид в перспективе отвеса, применяемого в первом и втором предпочтительных вариантах осуществления изобретения; фиг. 10 - вид сбоку отвеса, показанного на фиг. 9; фиг. 11 - вид сзади отвеса, показанного на фиг. 9; фиг. 12 - вид в плане отвеса, показанного на фиг. 9; фиг. 13 и 14 - виды в плане, соответственно, левого и правого держателей впадин; фиг. 15 - вид в плане ручки в сборе; фиг. 16 и 17 - виды сбоку и в плане, соответственно, рамы для совмещения; фиг. 18 и 19 - виды в плане проставных элементов для работы на, соответственно, левом и правом тазобедренном суставе; фиг. 20 - вид в перспективе пациента непосредственно перед началом хирургической операции по замещению тазобедренного сустава; фиг. 21 - вид в перспективе, показывающий часть инструмента для совмещения проставки, прикладываемой к вертлужной впадине пациента; фиг. 22 - вид в плане поверхности для считывания третьего предпочтительного варианта осуществления изобретения; фиг. 23 - вид в перспективе четвертого варианта осуществления изобретения; фиг. 24 - вид в перспективе с пространственным разделением деталей четвертого варианта осуществления; фиг. 25 - вид в плане корпуса в четвертом варианте осуществления; фиг. 26 - вид спереди корпуса в четвертом варианте осуществления; фиг. 27 - вид сбоку корпуса в четвертом варианте осуществления; фиг. 28 - вид в перспективе корпуса в четвертом варианте осуществления; фиг. 29 - вид в перспективе поворотного элемента в четвертом варианте осуществления; фиг. 30 - вид снизу поворотного элемента в четвертом варианте осуществления; фиг. 31 - вид спереди поворотного элемента в четвертом варианте осуществления; фиг. 32 - вид сбоку поворотного элемента в четвертом варианте осуществления; фиг. 33 - вид в перспективе штифта, используемого в четвертом варианте осуществления; фиг. 34 - вид сбоку штифта в четвертом варианте осуществления; фиг. 35 - вид спереди штифта в четвертом варианте осуществления; фиг. 36 - вид в перспективе нижнего компонента отвеса в четвертом варианте осуществления; фиг. 37 - вид в плане компонента, показанного на фиг. 36; фиг. 38 - вид спереди компонента, показанного на фиг. 36; фиг. 39 - вид сбоку компонента, показанного на фиг. 36; фиг. 40 - вид в перспективе верхнего компонента отвеса в четвертом варианте осуществления; фиг. 41 - вид в плане компонента, показанного на фиг. 40; фиг. 42 - вид спереди компонента, показанного на фиг. 40; фиг. 43 - вид сбоку компонента, показанного на фиг. 40; фиг. 44 - охватывающий компонент байонетного соединителя в четвертом варианте осуществления; фиг. 45 - вид спереди охватывающего компонента соединителя, показанного на фиг. 44; фиг. 46 - вид сбоку охватывающего компонента соединителя, показанного на фиг. 44; фиг. 47 - вид в плане охватывающего компонента соединителя, показанного на фиг. 44;-2 008902 фиг. 48 - вид в перспективе охватываемого компонента байонетного соединителя для использования с индикатором по четвертому варианту осуществления; фиг. 49 - вид в плане охватываемого компонента соединителя, показанного на фиг. 47; фиг. 50 - вид сбоку охватываемого компонента соединителя, показанного на фиг. 47 и фиг. 51 - вид спереди охватываемого компонента соединителя, показанного на фиг. 47. Как показано на чертежах, первый предпочтительный вариант осуществления индикатора 1 содержит корпус 2 с отвесом 3, закрепленным на корпусе 2. Отвес 3 провешивается от корпуса 2 под действием локального гравитационного поля. В частности, отвес 3 установлен с возможностью поворота относительно корпуса 2 как в первой плоскости, обозначенной штриховой линией 4 на фиг. 2, так и во второй плоскости, обозначенной штриховой линией 5 также на фиг. 2. Первая плоскость ортогональна второй плоскости. Универсальный шарнир в виде сферического шарнира 6 закрепляет отвес 3 с возможностью поворота на корпусе 2. Универсальный шарнир 6 содержит шарик 7, который по центру вмещен в отвесе 3. Внутренняя поверхность 8 отвеса 3 содержит вогнутую поверхность, которая соответствует выпуклой поверхности шарика 7. Ось 9 проходит через центр шарика 7 с образованием первого и второго цилиндрических концов 10 и 11. Вдоль конических участков 12 и 13 радиус оси 9 увеличивается от радиуса тонкой центральной части, которая вложена в шарик 7, до радиуса более крупных первого и второго цилиндрических концов 10 и 11. Ось 9 продолжается через отверстия 14 и 15, обеспеченные в отвесе. Отверстия 14 и 15 образуют кольцевые упоры 16 и 17, соответственно. Шарик 7 может свободно перемещаться в любом направлении относительно отвеса 3, по меньшей мере, пока точка, в которой любой конический участок 12 или 13 не натолкнется на соседний кольцевой упор 16 или 17. Диапазон перемещения отвеса 3 относительно оси 9 продлен изогнутой выборкой боковых стенок отвеса 3 в зонах отверстий 14 и 15, как лучше всего показано на фиг. 11. Для сборки отвеса с осью шарик 7, отвес 3 и компоненты оси сначала изготавливают по отдельности. Отвес 3 первоначально является полым в области непосредственно под обоймой для шарика 7. Это позволяет вставить шарик 7 через отверстие 20 в основание 21 отвеса 3. Затем шарик 7 заделывают внутри отвеса 3 стержнем 19, который вставляют через отверстие 20 и который после этого заполняет полость непосредственно под шариком 7. Затем вкручивают тонкую часть оси 9 с прикрепленным первым цилиндрическим концом 10 через отверстие 15 и отверстие, предусмотренное в шарике 7. Наконец, прикрепляют второй цилиндрический конец 11 к другой стороне тонкой части оси 9 крепежным элементом 22. Затем отвес 3 крепят к корпусу 2 жестким соединением цилиндрических концов 10 и 11 с корпусом 2, как лучше всего показано на фиг. 2. Корпус 2 содержит полукольцевое отверстие 28, которое обеспечивает просвет для основания 21 отвеса 3, что допускает разные положения под влиянием силы тяжести по мере того, как изменяется ориентация индикатора 1 относительно локального гравитационного поля. Для снижения веса в корпусе 2 может быть выполнено несколько отверстий 39, как показано, например, на фиг. 3 и 7. Во время применения корпус 2 ориентируют относительно отвеса 3 так, чтобы конические участки 12 и 13 не находились в контакте с кольцевыми упорами 16 и 17. Эта ориентация в сочетании с тем фактом, что отвес 3 имеет центр тяжести 18, который находится ниже шарнира, образованного шариком 7,обеспечивает отвесу 3 свободу вертикального провешивания под действием собственного веса. В альтернативных вариантах осуществления (не показанных) универсальный шарнир 6 имеет другие формы, например, шарнирного сочленения с серьгой, шарнирного сочленения наконечника соединительной тяги или розеточного шарнирного сочленения. Отвес 3 содержит указатель 23, который продолжается над универсальным шарниром 6. Когда возможно свободное провешивание в сферическом шарнире 7 под действием силы тяжести, конец указателя 23 расположен непосредственно над центром сферического шарнира 6, и центр тяжести 18 отвеса 3 расположен непосредственно под центром сферического шарнира 6. Корпус 2 образует камеру 29, которая обеспечивает просвет для перемещения указателя 23. Верхняя поверхность корпуса 2 содержит маркировочные знаки 24, 25, 26 и 27, расположенные вблизи указателя 23. Первый поднабор 24 и 26 маркировочных знаков соответствует угловым интервалам первого угла, и второй поднабор 25 и 27 маркировочных знаков соответствует угловым интервалам второго угла. При этом индикатор 1 можно использовать для определения первого угла в первой плоскости 4 и второго угла во второй плоскости 5. Например, в одном предпочтительном варианте осуществления маркировочные знаки 24 и 26 соответствуют интервалам 5 первого угла в пределах изменения от-25 на одном краю маркировочных знаков, с проходом через 0 в центре маркировочных знаков, и до+25 на противоположном краю маркировочных знаков. Аналогично, маркировочные знаки 25 и 27 соответствуют интервалам 5 второго угла в пределах изменения от -10 на одном краю маркировочных знаков, с проходом через 0 в центре маркировочных знаков, и до +10 на противоположном краю маркировочных знаков. Во время применения хирург или другое лицо, использующее предпочтительный вариант осуществления, может считывать положение наконечника указателя 23 относительно маркировочных-3 008902 знаков 24 или 26 для определения первого угла. Пользователь может также считывать положение наконечника указателя 23 относительно маркировочных знаков 25 или 27 для определения второго угла. Следовательно, одно хирургическое приспособление выгодно позволяет пользователю быстро и просто определять два отдельных угла, связанных с ориентацией индикатора 1 относительно локального гравитационного поля. Индикатор 1 в соответствии с настоящим изобретением предпочтительно заменяет ручку 158 для совмещения, показанную на фиг. 36 рассматриваемой заявки РСТPCT/AU02/01482 (WO 03/037192). Соединитель 30 расположен на корпусе 2 для присоединения индикатора 1 к протезному компоненту, или другому хирургическому приспособлению, или к заданному месту пациента. Например, индикатор 1 может составлять один компонент хирургического приспособления, например, инструмента для совмещения впадины, который содержит индикатор 1; либо левый, либо правый держатель 158 впадины, показанные на фиг. 13 и 14 соответственно; и ручку 213, показанную на фиг. 15. Корпус 2 индикатора 1 образует дистальный конец 31 и проксимальный конец 32, с ручкой 34 в промежутке между данными концами. Отвес 3 расположен вблизи проксимального конца 32. Соединитель, который содержит втулку 30 с внутренней резьбой, расположен на дистальном конце 31. Сборка инструмента для совмещения впадины требует сопряжения втулки 30 с любым из держателей 158 впадины, показанным на фиг. 13 и 14. Соответствующий держатель 158 впадины крепится к индикатору 1 средством 160 крепления, расположенным на проксимальном конце 164 держателя 158 впадины. В частности, средство 160 крепления содержит выступ 169, который вставляется в соединитель на дистальном конце 31 индикатора 1 для обеспечения правильного относительного совмещения двух компонентов. После вставки одного в другой втулка 30 с внутренней резьбой входит в зацепление с внутренней резьбой 224 на держателе 158 впадины для скрепления двух компонентов. Ручка 213, показанная на фиг. 15, дает хирургу дополнительный выигрыш в силе за счет рычага при манипулировании инструментом 167 для совмещения впадины. Для соединения ручки 213 с держателем 158 впадины, внешняя резьба 163 на ручке 213 входит в резьбовое зацепление с внутренней резьбой 162,расположенной внутри держателя 158 впадины. Полученный инструмент 167 для совмещения впадины аналогичен инструменту, показанному на фиг. 69 рассматриваемой заявки РСТPCT/AU02/01482 (WO 03/037192), но с ручкой 159 для совмещения, замененной индикатором 1. Следующий этап состоит в закреплении протеза для вертлужной впадины соответствующего размера на инструменте для совмещения впадины (по меньшей мере с одной проставкой, при необходимости, для подгонки размера протеза для вертлужной впадины). Затем хирург манипулирует инструментом для совмещения впадины в ране таким образом, чтобы впадина располагалась с прилеганием к рассверленной вертлужной впадине. После этого необходимо ориентировать инструмент для совмещения впадины, чтобы обеспечить анатомически правильную ориентацию протеза для вертлужной впадины для вставки в рассверленную вертлужную впадину. Это достигается с привязкой к двум углам, указываемым указателем 23 на индикаторе 1 в сочетании с рамой 176 для совмещения, показанной на фиг. 16 и 17. Другими словами, инструмент для совмещения впадины может применяться хирургом в манере, аналогичной той, что описана в совместно рассматриваемой заявке РСТPCT/AU02/01482 (WO 03/037192), но с дополнительным преимуществом получения хирургом дополнительной информации благодаря контролю двух углов в двух разных плоскостях при использовании настоящего индикатора 1 вместо одного угла в одной плоскости,который показывается отвесом 173 ручки 159 для совмещения, описанной в рассматриваемой заявке РСТPCT/AU02/01482 (WO 03/037192). Геометрия соединителя 158 по отношению к индикатору 1 и ориентации пациента (которого поддерживают в стабильном состоянии с использованием держателя 230 таза,показанного на фиг. 20) является такой, что первый угол, считываемый в первой плоскости по маркировочным знакам 24 или 26, соответствует отвороту протеза для вертлужной впадины относительно рассверленной вертлужной впадины. Аналогично, второй угол во второй плоскости, считываемый по маркировочным знакам 25 или 27, соответствует отведению протеза для вертлужной впадины относительно рассверленной вертлужной впадины. Рама 176 для совмещения, показанная на фиг. 16 и 17, может применяться для точного совмещения протеза для вертлужной впадины в плоскости, отличающейся от плоскости, указанной отвесом 3. Рама 176 для совмещения содержит элемент 177 рамы, который образует первый конец 178 и второй конец 179. Элемент 177 рамы обычно имеет L-образную форму, при наблюдении сбоку, и А-образную форму,на виде в плане. Опорная бобышка 180 расположена на первом конце 178 и выполнена с возможностью упора в плоскую поверхность, в частности, вертикальную боковую сторону операционного стола. Например, хирург может использовать свое колено для прижима опорной бобышки 180 к боковой стороне операционного стола. Второй конец 179 рамы 176 для совмещения располагают с прилеганием к тазобедренному суставу пациента. Средство зацепления в виде прорезного элемента 181 расположено на втором конце 179 и совмещается так, чтобы выступать к тазобедренному суставу пациента. Открытая с одной стороны прорезь 225 в-4 008902 прорезном элементе 181 образует полукольцевую поверхность 226 с внутренним радиусом кривизны,который соответствует внешнему радиусу кривизны ручки 34 индикатора 1. Другими словами, прорезь 225 имеет размер для вмещения и направления ручки 34. Геометрия такова, что зацепление ручки 34 со средством 181 зацепления создает усилие, поджимающее ручку 159 для совмещения в заданную ориентацию относительно третьей плоскости, которая отличается от двух плоскостей, связанных с отвесом 3. Это объясняется тем, что прорезной элемент 181 имеет ширину 227, достаточную для того, чтобы, когда ручка 34 находится в зацеплении с прорезным элементом 181, обеспечивать совпадение продольной оси ручки 34 с осью прорезного элемента 181. В частности, когда ручка 34 расположена внутри прорезного элемента 181, ручка 34 и, следовательно, индикатор 1, по существу, перпендикулярны боковой стороне операционного стола. Пока сохраняется данное положение, хирург может наклонять индикатор 1 для корректировки отклонения и поворачивать индикатор 1 для корректировки отведения. Следовательно, если выполняется каждое из следующих условий: тазобедренный сустав пациента находится на операционном столе в заданном положении, показанном на фиг. 20; первый конец 178 рамы 176 для совмещения упирается в боковую сторону операционного стола,соседнюю с тазобедренным суставом пациента, так что прорезной элемент 181 обращен к тазобедренному суставу пациента; ручка 34 индикатора 1 находится в зацеплении с прорезным элементом 181; и указатель 23 индикатора указывает искомые углы отворота и отведения,то хирург может быть уверен в том, что протез для вертлужной впадины правильно расположен для вставки в тазобедренный сустав пациента. С этого момента хирург использует ударник в сборе для забивания протеза для вертлужной впадины в рассверленную вертлужную впадину. Другой этап типичной операции по замещению тазобедренного сустава заключается во вставке ножки протеза в бедренный канал. После вставки конец 34 ножки 33 протеза выступает из конца бедренной кости. В данном случае необходимо определить длину шейки протеза, требующуюся для обеспечения правильной послеоперационной длины ноги, напряжения тканей и напряжения мышцы. На ножку устанавливают короткую пробную головку и уменьшают тазобедренный сустав. Как лучше всего показано на фиг. 21, собирают инструмент 189 для совмещения проставки присоединением, по требованию,левого или правого проставного элемента 190 к индикатору 1 аналогично тому, как держатель 158 впадины был ранее прикреплен к индикатору 1. А именно, выступ 191 вставляется в отверстие, расположенное в соединителе 30 на дистальном конце 31 индикатора 1. Втулка 30 входит в резьбовое зацепление с проксимальным концом 192 проставного элемента 190. Также аналогично предыдущей сборке инструмента для совмещения впадины, ручку 213 вкручивают в проставной элемент 190 по внутренней резьбе 193, обеспеченной вблизи проксимального конца 192 проставного элемента 190. Другими словами, для сборки инструмента 189 для совмещения проставки следует просто начинать с инструмента для совмещения впадины и заменять держатель 158 впадины проставным элементом 190. Проставной элемент 190 содержит проставку 194, которая содержит прорезь 195, выполненную с возможностью зацепления конца 34 ножки протеза, которая вставлена в бедренный канал. Тем самым помещают проставку 194 между пробной головкой и концом 34 бедренной кости, как показано на фиг. 21(хотя пробная головка не видна внутри рассверленной вертлужной впадины). При правильном расположении пробная головка расположена внутри полусферической поверхности 203. И снова хирург может воспользоваться отвесом 3 на индикаторе 1 в сочетании с рамой 176 для совмещения, чтобы обеспечить анатомически правильную ориентацию проставки 194 и пробной головки и одновременно выполнять проверки для определения подходящей длины шейки протеза. Другим примером применения индикатора 1 является измерение естественной геометрии пациента перед вставкой протезных компонентов. Например, после вывиха тазобедренного сустава хирургу, возможно, потребуется измерить естественные углы отворота и отведения вертлужной впадины пациента. В таком случае применения индикатор 1 присоединяют к соединителю, который упирается в вертлужную впадину пациента, и индикатор поддерживают в заданном положении относительно пациента (например,посредством держателя 230 таза, как показано на фиг. 20, и рамы для совмещения, показанной на фиг. 16 и 17, с помощью способа, аналогичного вышеописанному). Это дает возможность хирургу определить естественный угол отворота по маркировочным знакам 24 или 26 и естественный угол отведения по маркировочным знакам 25 или 27. Соответственные численные значения запоминают для последующего использования, например, хирург может предпочесть вставить протез вертлужной впадины под углами отворота и отведения, равными найденным выше естественным углам. Альтернативный предпочтительный вариант осуществления индикатора 37, показанный на фиг. 5-8,по существу, идентичен предпочтительному варианту осуществления индикатора, показанному на фиг. 1-4, но, за исключением применения отличающегося соединителя 30, который выполнен в виде зажима. Данный зажим содержит кронштейн 35, неподвижно расположенный противоположно концу 36 болта 37. Следовательно, часть объекта, к которому следует подсоединить индикатор 37, может находиться между кронштейном 35 и концом 36 болта. Затем головку 38 болта поворачивают так, чтобы ввертывать конец 36 болта в направлении кронштейна 35 для прижима индикатора 37 к объекту.-5 008902 Другой вариант осуществления индикатора 40 содержит поверхность для считывания, показанную на фиг. 22. Данный вариант осуществления отличается от вышеупомянутых вариантов осуществления в том, что использует два раздельных отвеса 41 и 42 вместо единственного отвеса 3. В данном варианте осуществления первый и второй отвесы 41 и 42 по отдельности закреплены на корпусе 43 индикатора,чтобы каждый провешивался под влиянием силы тяжести. Первый отвес 41 закреплен на корпусе 43 для поворота в первой плоскости относительно первой оси 44, и второй отвес 42 закреплен на корпусе 43 для поворота во второй плоскости относительно второй оси 45. Первая ось 44 ортогональна второй оси 45. В процессе применения хирург сравнивает положение первого отвеса 41 с маркировочными знаками 46 или 47 для определения первого угла. Аналогично, положение второго отвеса 42 сравнивают с маркировочными знаками 48 или 49 для определения второго угла. Данный вариант осуществления обладает преимуществом механической простоты по сравнению с индикаторами 1 и 37, показанными на фиг. 1-8,поскольку в данном варианте осуществления не требуется обеспечение универсального шарнира 30. Четвертый вариант осуществления изобретения показан на фиг. 23-47, включительно. Данный предпочтительный вариант осуществления индикатора 301 содержит корпус 302 с отвесом 303, закрепленным на корпусе 302. Отвес 303 провешивается из корпуса 302 под действием локального гравитационного поля. В частности, отвес 303 установлен с возможностью поворота относительно корпуса 302 как в первой плоскости, так и во второй плоскости, при этом упомянутые плоскости ортогональны одна другой. Универсальный шарнир 304 крепит отвес 303 с возможностью поворота к корпусу 302. Универсальный шарнир 304 состоит из удлиненного поворотного элемента 305, лучше всего показанного на фиг. 29-32. Поворотный элемент 305 зафиксирован на штифте 306, который проходит сквозь отверстие 336, выполненное в поворотном элементе 305. Штифт 306 зафиксирован в отверстиях 337 и 338, предусмотренных на корпусе 307. Поворотный элемент 305 содержит полусферическую головку 308 и полусферическое основание 309. Верхняя полусферическая головка 308 выполнена для сопряжения с соответствующей полусферической полостью 310, предусмотренной в верхнем компоненте 311 отвеса 303. Диаметр полусферической головки 308 равен диаметру соответствующей полусферической полости 310. Предельно малый диаметр может обеспечивать высокочувствительную выходную реакцию индикатора; а именно, стрелка 315 индикатора колеблется недопустимо долго перед установкой на неподвижное показание. Напротив, слишком большой диаметр будет способствовать слишком сильному демпфированию отвеса, что, в принципе, приводит к неточному показанию. В предпочтительном варианте осуществления данный диаметр предпочтительно больше чем 1 мм и меньше чем 6 мм. Еще более предпочтительно, если диаметр больше чем 2 мм и меньше чем 4 мм. Диаметр, используемый в предпочтительном варианте осуществления, равен 3 мм, который, как установлено, обеспечивает подходящую степень затухания движения отвеса 303 относительно корпуса 302. Во время сборки отвес 303 устанавливают с возможностью поворота на корпусе 302 посредством размещения верхнего компонента 311 так, что полость 310 либо находится в зацеплении, либо непосредственно прилегает к головке 308. Нижний компонент 312 отвеса 303 расположен на противоположном конце или вблизи данного конца поворотного элемента 305, так что верхний и нижний компоненты 311 и 312 сопрягаются один с другим. В частности, выемка 313 на нижнем торце верхнего компонента 311 выполнена с возможностью сопряжения с фланцем 314, выполненным на верхнем торце нижнего компонента 312. Затем верхний и нижние компоненты 311 и 312 соединяют один с другим, например, соединительным средством типа пайки, клея или т.п. Тем самым эффективно заделывают поворотный элемент 305 внутри отвеса 303. Следовательно, когда индикатор используют, и поворотный элемент 305 ориентирован, по существу, вертикально, отвес 303 свободно поворачивается в двух плоскостях и, тем самым,позволяет центру тяжести отвеса занимать положение непосредственно под головкой 308. При этом стрелка 315 индикатора поворачивается в положение, которое дает возможность считать два угла по двум наборам маркировочных знаков 316 и 317, как подробно изложено в ранее описанных вариантах осуществления. Внутренние размеры полости внутри отвеса 303, в которую вложен поворотный элемент 305, выбраны так, чтобы, когда отвес 303 провешивается под действием силы тяжести от головки 308, обеспечивался минимальный зазор между основанием 309 и соседней внутренней поверхностью 335 нижнего компонента 312. Это обеспечивает зацепление отвеса 303 с поворотным элементом 305 только на его головке 308, что обеспечивает возможность свободного провешивания отвеса. То есть тип шарнира, используемый в данном предпочтительном варианте осуществления, можно назвать одноосно-точечным шарнирным сочленением, в котором головка 308 поворотного элемента 305 фактически действует, как единственный центр вращения. Зазор предпочтительно минимален для обеспечения невозможности смещения отвеса на какое-либо существенное расстояние от его зацепления с головкой 308, что могло бы случиться, например, если бы индикатор 301 имел люфт вверх и вниз или случайно падал. В предпочтительном варианте осуществления применяется зазор около 0,5 мм. Другими словами, минимальный зазор обеспечивает сохранение полости 310 в положении плотного прилегания к головке 308, даже если индикатор резко дергают или роняют, и тем самым возврат в зацепление с головкой 308, когда индикатор 301 возвращают в его рабочую ориентацию относительного силы тяготения.-6 008902 На противоположных сторонах верхнего компонента 311 отвеса 303 выполнены вырезы 318 и 319,чтобы отвес 303 мог поворачиваться в допустимых для него пределах перемещения, без столкновения со штифтом 306. По той же причине, дополнительные вырезы 320 и 321 обеспечены на нижнем компоненте 312 отвеса 303. Четвертый вариант осуществления индикатора 301 можно соединять с другими хирургическими приспособлениями посредством соединителя 322 в виде байонетного соединителя. Охватывающий компонент 323 соединителя расположен на стороне корпуса 302. Данный охватывающий компонент 323 соединителя содержит полый цилиндр 332 с проксимальным концом 324, который крепится к корпусу 302,и открытым дистальным концом 325, предназначенным для вмещения охватываемого компонента 328 соединителя. Открытый дистальный конец 325 содержит два противоположных канала 329 и 330, которые, соответственно, образуют две направляющие дорожки, в которые можно вставлять соответствующую пару штырей 326 и 327, выступающих из охватываемого компонента 328 соединителя. В качестве меры предосторожности от неправильного положения индикатора 301 относительно хирургического приспособления, к которому индикатор крепят, направляющие дорожки 329 и 330 и соответствующие штыри 326 и 327 имеют разные размеры. Следовательно, существует только одна ориентация индикатора 301 относительно хирургического приспособления, в которой оба штыря могут сопрягаться с обеими направляющими дорожками. При рассогласовании на 180 больший штырь 326 не войдет в канал 330 меньшего размера. Охватывающий компонент 323 соединителя содержит упругое поджимающее средство в виде пружины 331, которая расположена с охватом полого цилиндра, чтобы нажимать на штыри 326 и 327 после вставки охватываемого компонента 328 соединителя в охватывающий компонент 323 соединителя. Тем самым штыри поджимаются к дистальному концу полого цилиндра. Следовательно, как только индикатор 301 повернут относительно хирургического приспособления, к которому присоединяют индикатор,штыри 326 и 327 пройдут по кривым 333 и 334 в направляющих дорожках, и в данной точке упругий поджим заставит штыри войти в надежное зацепление с концами 335 и 336 направляющих дорожек и,тем самым, соединить индикатор 301 с хирургическим приспособлением. В подсоединенном положении конец стержня 339 охватываемого компонента 328 соединителя вмещен в полый цилиндр 332. Для отсоединения индикатора 301 от охватываемого компонента 328 соединителя хирургического приспособления пользователь должен сдвинуть штыри 326 и 327 против поджимного усилия, затем повернуть индикатор 301 относительно хирургического приспособления так, чтобы переместить штыри 326 и 327 обратно по кривым 333 и 334 и, тем самым, позволить штырям выйти из зацепления через открытые концы направляющих дорожек 340 и 341. Выше изобретение описано на примере конкретных вариантов осуществления, однако, специалистам в данной области техники очевидно, что изобретение может быть осуществлено во многих других формах. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Индикатор для использования при хирургической операции для определения первого угла в первой плоскости и второго угла во второй плоскости, при этом данный индикатор содержит корпус и отвес,закрепленный на упомянутом корпусе так, чтобы провешиваться под действием локального гравитационного поля, причем упомянутый отвес установлен с возможностью поворота относительно упомянутого корпуса как в упомянутой первой плоскости, так и в упомянутой второй плоскости, чтобы определять упомянутый первый угол и упомянутый второй угол соответственно. 2. Индикатор по п.1, в котором универсальный шарнир закрепляет упомянутый отвес с возможностью поворота на упомянутом корпусе. 3. Индикатор по п.2, в котором упомянутый универсальный шарнир представляет собой любой шарнир из сферического шарнира; одноосно-точечного шарнирного сочленения; шарнирного сочленения с серьгой; шарнирного сочленения наконечника соединительной тяги или розеточного шарнирного сочленения. 4. Индикатор по любому из предшествующих пунктов, в котором упомянутая первая плоскость ортогональна упомянутой второй плоскости. 5. Индикатор по любому из предшествующих пунктов, в котором упомянутый отвес содержит указатель. 6. Индикатор по п.5, в котором упомянутый корпус содержит маркировочные знаки, расположенные вблизи упомянутого указателя. 7. Индикатор по п.6, в котором первый поднабор упомянутых маркировочных знаков соответствует угловым интервалам упомянутого первого угла и второй поднабор упомянутых маркировочных знаков соответствует угловым интервалам упомянутого второго угла.-7 008902 8. Индикатор по любому из предшествующих пунктов, дополнительно содержащий соединитель,расположенный на упомянутом корпусе для присоединения упомянутого индикатора к протезному компоненту. 9. Индикатор по любому из предшествующих пунктов, дополнительно содержащий соединитель,расположенный на упомянутом корпусе для присоединения упомянутого индикатора к заданному месту пациента. 10. Индикатор по любому из предшествующих пунктов, в котором упомянутая хирургическая операция представляет собой вставку протеза для вертлужной впадины в рассверленную вертлужную впадину во время оперативного вмешательства по замещению тазобедренного сустава. 11. Индикатор по п.10, в котором упомянутый первый угол соответствует отвороту упомянутого протеза для вертлужной впадины относительно рассверленной вертлужной впадины. 12. Индикатор по п.10 или 11, в котором упомянутый второй угол соответствует отведению упомянутого протеза для вертлужной впадины относительно рассверленной вертлужной впадины. 13. Индикатор по любому из предшествующих пунктов, в котором перемещение отвеса относительно корпуса демпфируется. 14. Индикатор для использования при хирургической операции для определения первого угла в первой плоскости и второго угла во второй плоскости, при этом данный индикатор содержит корпус,первый отвес, закрепленный на упомянутом корпусе так, чтобы провешиваться под действием локального гравитационного поля, причем упомянутый первый отвес установлен с возможностью поворота относительно упомянутого корпуса в упомянутой первой плоскости, чтобы определять упомянутый первый угол, и второй отвес, закрепленный на упомянутом корпусе так, чтобы провешиваться под действием локального гравитационного поля, причем упомянутый второй отвес установлен с возможностью поворота относительно упомянутого корпуса в упомянутой второй плоскости, чтобы определять упомянутый второй угол. 15. Индикатор по п.14, в котором упомянутый первый отвес закреплен на упомянутом корпусе для поворота относительно первой оси и второй отвес закреплен на упомянутом корпусе для поворота относительно второй оси, при этом упомянутая первая ось ортогональна упомянутой второй оси.
МПК / Метки
Метки: хирургической, индикатор, операции, использования
Код ссылки
<a href="https://eas.patents.su/19-8902-indikator-dlya-ispolzovaniya-pri-hirurgicheskojj-operacii.html" rel="bookmark" title="База патентов Евразийского Союза">Индикатор для использования при хирургической операции</a>
Поддерживающее устройство, предназначенное для использования в качестве опоры кости во время хирургической операции
Номер патента: 7690
Опубликовано: 29.12.2006
Авторы: Лай Боб, Иган Майкл, Шерри Юджин
МПК: A61B 17/15
Метки: опоры, использования, предназначенное, устройство, кости, операции, качестве, поддерживающее, время, хирургической
Формула / Реферат:
1. Опора кости, предназначенная для использования во время удаления нежелательного материала из полости костного образования во время хирургического вмешательства, причем указанная опора включает в себя хирургический поддерживающий зажим, приспособленный для взаимодействия с наружной поверхностью костного образования, причем зажим имеет пару протяженных плеч с противоположными поддерживающими кость образованиями на одном конце для взаимодействия...
Трехмерный электролюминесцентный индикатор
Номер патента: 7665
Опубликовано: 29.12.2006
Автор: Энц Эмиль
МПК: H05B 33/10, H05B 33/00
Метки: электролюминесцентный, индикатор, трехмерный
Формула / Реферат:
1. Трехмерный электролюминесцентный индикатор, содержащий электролюминесцентное устройство (20), имеющее прозрачный лицевой слой (2) и расположенное за ним электролюминесцентное приспособление (10), при этом указанное электролюминесцентное приспособление (10) содержит передний электрод (11), задний электрод (12), сформированные в виде слоев, а также диэлектрический слой (13), находящийся между указанными электродами (11, 12), отличающийся тем,...
Линейный индикатор для клапана
Номер патента: 4733
Опубликовано: 26.08.2004
Автор: Пимуге Оливье Дени
МПК: F16K 37/00
Метки: клапана, линейный, индикатор
Формула / Реферат:
1. Устройство индикации положения клапана, имеющего шток, перемещаемый в направлении закрывания и в направлении открывания между закрытым и открытым положениями клапана, содержащее первую систему кулачков, смещаемую в направлении открывания, способную входить в регулируемое зацепление со штоком при его нахождении вблизи закрытого положения клапана и способную перемещаться посредством штока в направлении закрывания, после вхождения в зацепление,...
Система управления хирургической осветительной аппаратурой и видеокамерой
Номер патента: 6190
Опубликовано: 27.10.2005
Авторы: Грешлер Аллан Дж., Рас Стивен Х., Драбински Терри А., Кезельман Юрий, Петруччи Джеймс А., Джесаран Дэвид
МПК: H05B 37/03, A61B 19/00
Метки: видеокамерой, управления, хирургической, система, аппаратурой, осветительной
Формула / Реферат:
1. Система (10) хирургического освещения, содержащая осветительный блок (44), присоединенный к рычагу (44') подвески, выполненному с возможностью монтажа на поверхности (14) хирургической комнаты, электрическую лампу (130) в упомянутом осветительном блоке, процессор (120) в упомянутом осветительном блоке, соединенный с электрической лампой для управления интенсивностью света электрической лампы и выполненный с возможностью генерирования сигнала...
Способ хирургической коррекции астигматизма аксиальным лазерным кератомилезом
Номер патента: 4720
Опубликовано: 26.08.2004
Автор: Беликова Елена Ивановна
МПК: A61F 9/008
Метки: кератомилезом, аксиальным, коррекции, лазерным, астигматизма, хирургической, способ
Формула / Реферат:
Способ хирургической коррекции астигматизма аксиальным лазерным кератомилезом, заключающийся в осуществлении лазерного специализированного кератомилеза путем проведения местной анестезии, наложения на роговицу вакуумного кольца и выкраивания поверхностного лоскута роговицы с помощью микрокератома, последующей лазерной кератоабляцией стромального ложа и репозицией лоскута, отличающийся тем, что поверхностный лоскут роговицы выкраивают в...
Предыдущий патент: Ударный яс для применения во внутрискважинном буровом снаряде
Следующий патент: Способ определения глубины скважины
Случайный патент: Электродное устройство