Способ улучшения измерений глубины бурения
Формула / Реферат
1. Способ выбора рабочих параметров бурения, в котором определяют характеристики по меньшей мере одного параметра реакции на бурение в соответствии с литологией, причем определение характеристик осуществляют, если параметр, связанный с диссипативным движением бурильной колонны, меньше выбранной пороговой величины; измеряют в процессе бурения указанный по меньшей мере один параметр реакции на бурение; определяют литологию по измеренному параметру реакции на бурение; и выбирают по меньшей мере один рабочий параметр бурения для оптимизации по меньшей мере одного параметра реакции на бурение, если параметр, связанный с диссипативным движением бурильной колонны, меньше выбранной пороговой величины для определенной литологии.
2. Способ по п.1, отличающийся тем, что параметр реакции на бурение, оптимизированный в процессе бурения, тождественен параметру реакции на бурение, имеющему характеристики, определенные в соответствии с литологией.
3. Способ по п.1, отличающийся тем, что определение характеристик включает измерение по меньшей мере одного свойства, относящегося по меньшей мере к одному составу или механическим свойствам земных пород, и определение отношения между рабочим параметром бурения и параметром реакции на бурение в породах, имеющих сходную литологию.
4. Способ по п.3, отличающийся тем, что по меньшей мере одно свойство является либо литологическим описанием, либо твердостью породы, либо электрическим удельным сопротивлением, либо временем прохождения акустического интервала, либо естественным гамма-излучением, либо пористостью по данным нейтронного каротажа, либо насыпной плотностью.
5. Способ по п.1, отличающийся тем, что по меньшей мере один рабочий параметр бурения является либо нагрузкой на долото, либо скоростью вращения, либо расходом бурильного раствора.
6. Способ по п.1, отличающийся тем, что по меньшей мере один параметр реакции на бурение является либо скоростью проходки, либо ускорением бурильной колонны.
7. Машиночитаемый носитель, на который записана программа, содержащая логику, при исполнении которой программируемый компьютер осуществляет следующие операции: определение характеристик по меньшей мере одного параметра реакции на бурение в соответствии с литологией, причем определение характеристик осуществляется, если параметр, связанный с диссипативным движением бурильной колонны, меньше выбранной пороговой величины; измерение в процессе бурения указанного по меньшей мере одного параметра реакции на бурение; определение литологии по измеренному параметру реакции на бурение; и выбор по меньшей мере одного рабочего параметра бурения для оптимизации по меньшей мере одного параметра реакции на бурение, если параметр, связанный с диссипативным движением бурильной колонны, меньше выбранной пороговой величины для определенной литологии.
8. Носитель по п.7, отличающийся тем, что параметр реакции на бурение, оптимизированный в процессе бурения, тождественен параметру реакции на бурение, имеющему характеристики, определенные в соответствии с литологией.
9. Носитель по п.8, отличающийся тем, что определение характеристик включает измерение по меньшей мере одного свойства, относящегося по меньшей мере к одному составу или механическим свойствам земных пород, и определение отношения между рабочим параметром бурения и параметром реакции на бурение в породах, имеющих сходную литологию.
10. Носитель по п.9, отличающийся тем, что по меньшей мере одно свойство является либо электрическим удельным сопротивлением, либо временем прохождения акустического интервала, либо естественным гамма-излучением, либо пористостью по данным нейтронного каротажа, либо насыпной плотностью.
11. Носитель по п.8, отличающийся тем, что рабочий параметр бурения является либо нагрузкой на долото, либо скоростью вращения, либо расходом бурильного раствора.
12. Носитель по п.8, отличающийся тем, что по меньшей мере один параметр реакции на бурение является либо скоростью проходки, либо ускорением бурильной колонны.

Текст
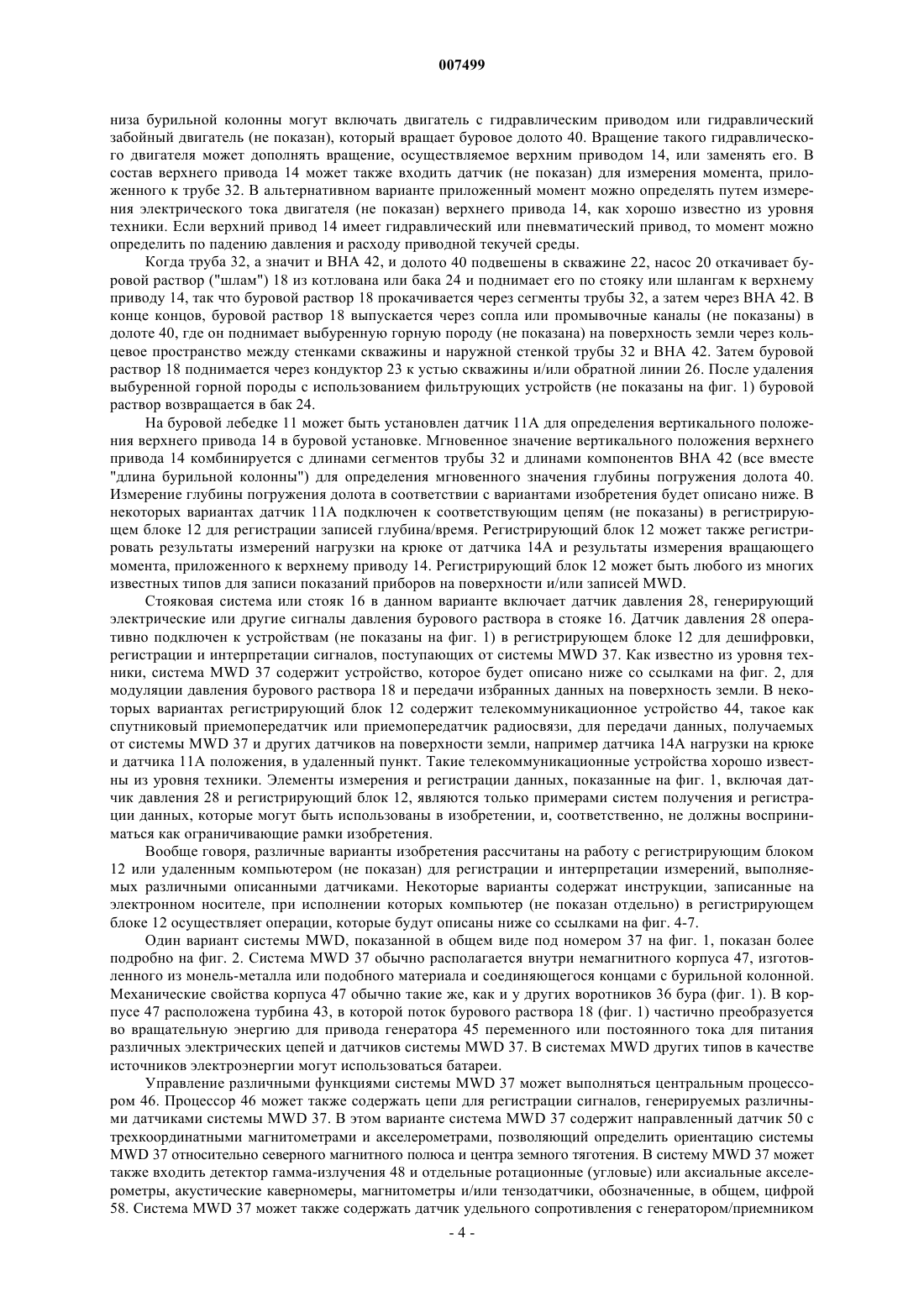
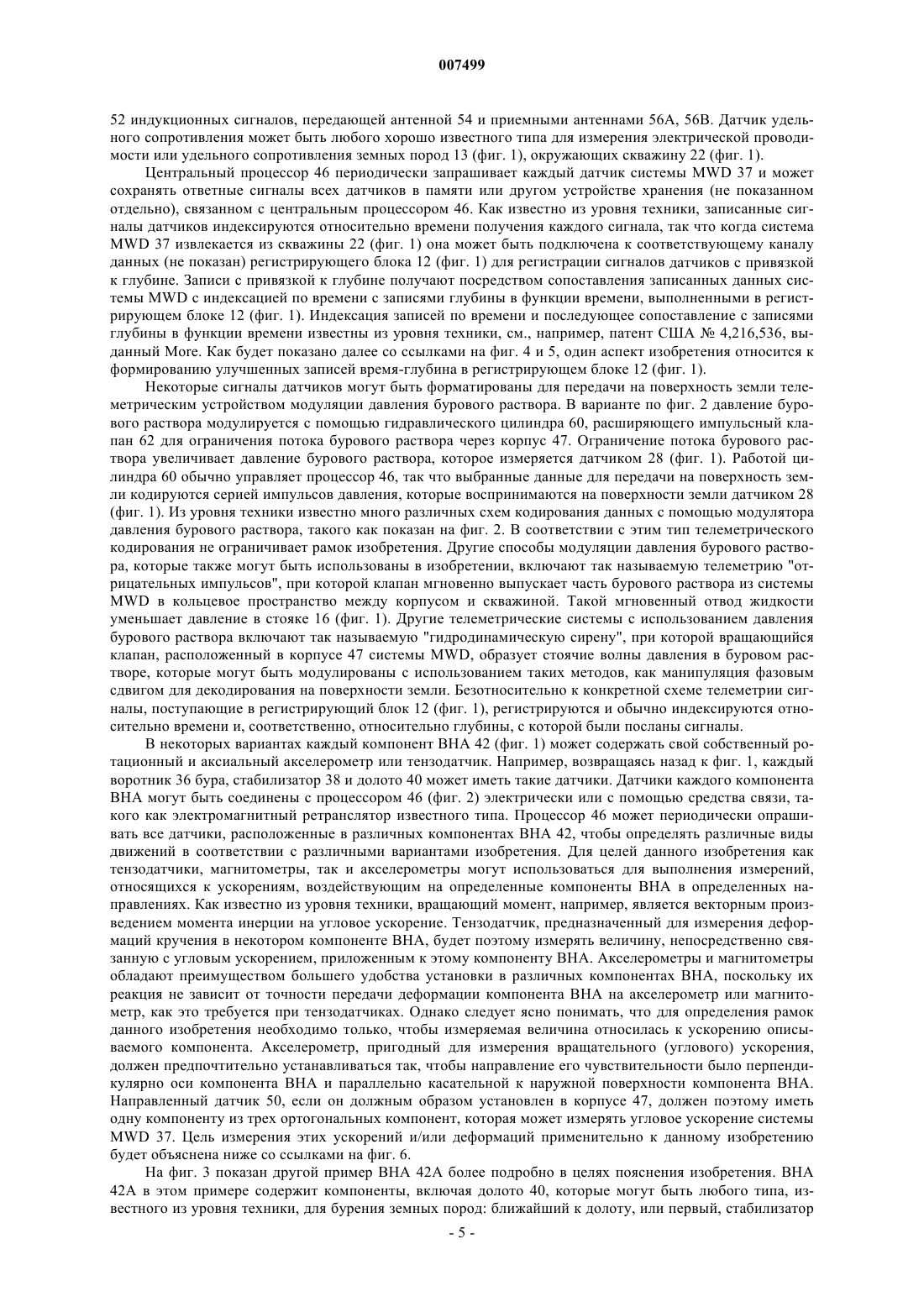
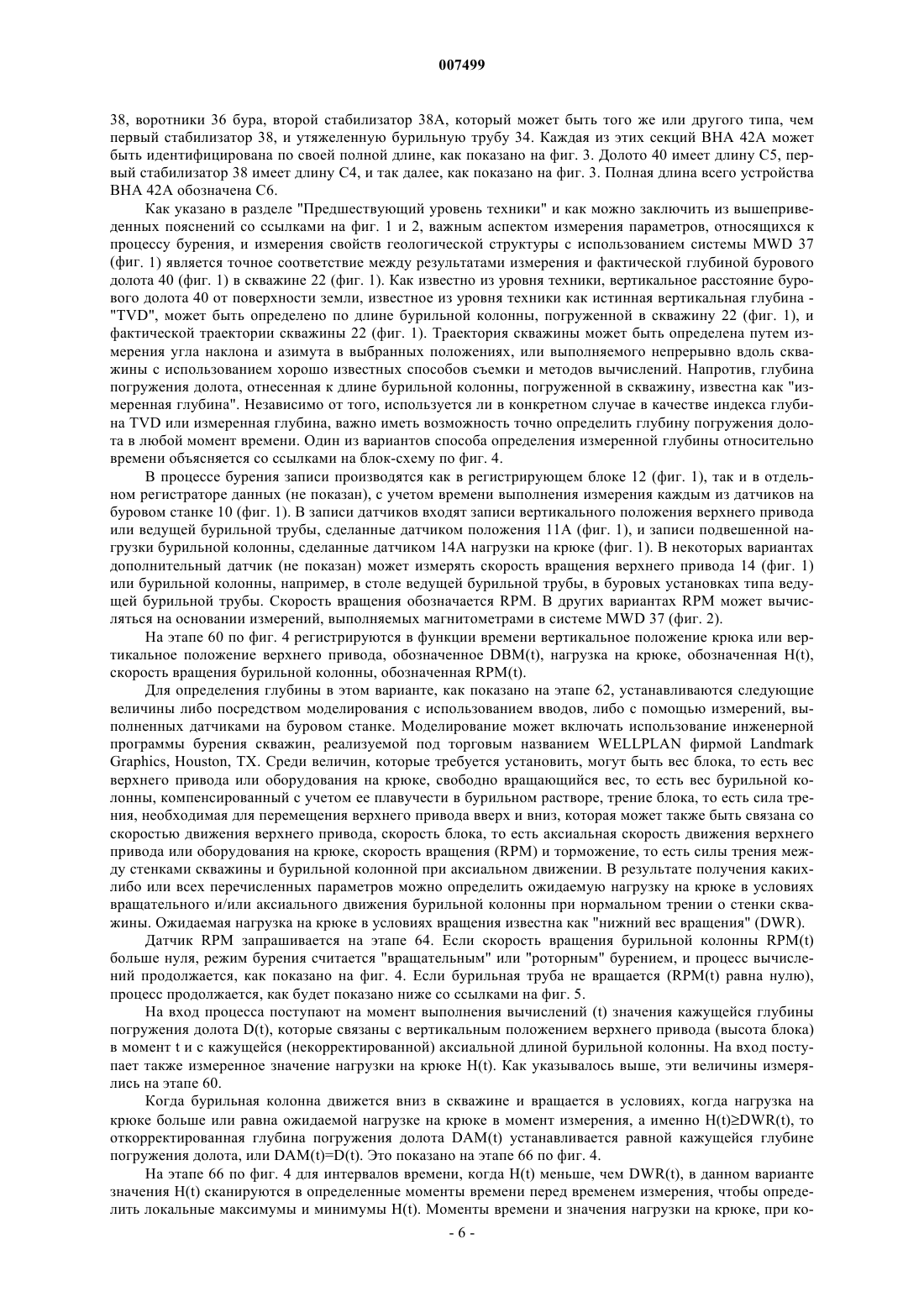
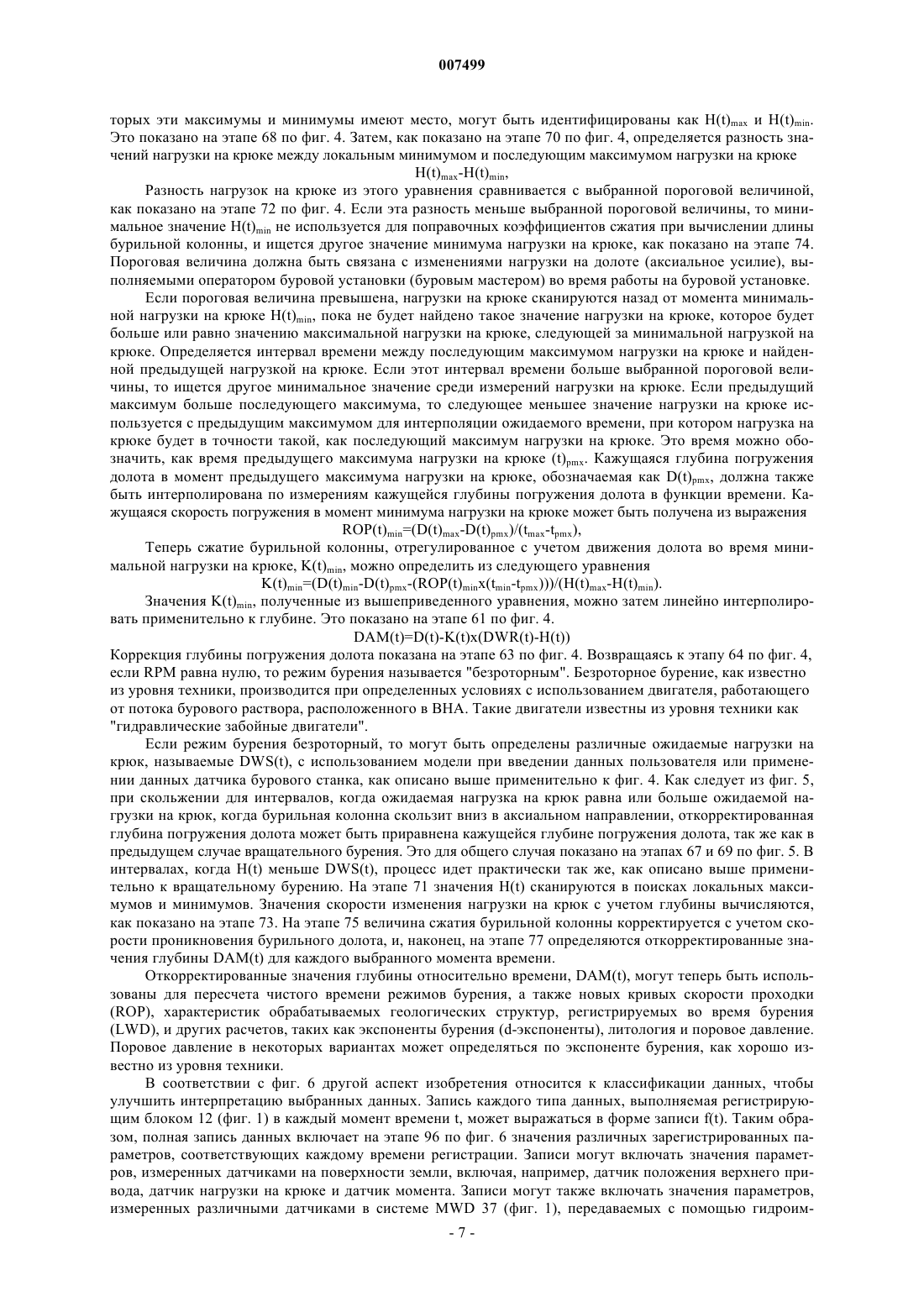
007499 Область техники, к которой относится изобретение Изобретение, в целом, относится к области бурения скважин в земле. Более конкретно, изобретение относится к способам определения фактической глубины бурения бурильной колонны в скважине относительно времени, а также применению фактической глубины к управлению процессом бурения. Изобретение относится далее к способам определения характерных данных бурения на основе вероятного качества и применения к характерным данным. Предшествующий уровень техники Бурение скважин в земле включает в себя роторное бурение, при котором к буровому станку или подобному подъемному приспособлению подвешена бурильная колонна. Бурильная колонна вращает буровое долото, расположенное на конце бурильной колонны. Оборудование на буровом станке и (или) гидравлический двигатель, расположенный в бурильной колонне, вращает буровое долото. Бурильная колонна подвешена к подъемному приспособлению бурового станка так, чтобы к буровому долоту было приложено заданное аксиальное усилие, когда долото вращается. Вследствие сочетания аксиального усилия с вращением долота долото выдалбливает, выскабливает и/или дробит скальную породу, пробуривая в ней скважину. Обычно буровой станок содержит жидкостные насосы для закачивания внутрь бурильной колонны жидкости, именуемой "буровым раствором". Буровой раствор, в конечном счете,выливается через сопла или промывочные каналы в буровом долоте. Буровой раствор поднимает буровой шлам из скважины и выносит его на поверхность земли для удаления. В других типах буровых установок в качестве текучей среды для подъема бурового шлама может использоваться сжатый воздух. Буровой станок обычно содержит датчики для измерения эксплуатационных параметров бурения. Среди этих датчиков имеется датчик "нагрузки на крюке", измеряющий вес груза, подвешенного на подъемном устройстве бурового станка. Путем измерения нагрузки на крюке можно определить аксиальное усилие, приложенное к буровому долоту, по разности между полным весом бурильной колонны,который может быть измерен и/или вычислен, и подвешенной нагрузкой. В число датчиков обычно также входит устройство для измерения вертикального положения подъемного устройства в буровом станке. Определив вертикальное положение и сопоставив с ним длину бурильной колонны над буровым долотом, можно вычислить глубину положения бурового долота в скважине, а следовательно мгновенное значение глубины скважины. Длину бурильной колонны можно вычислить путем сложения длин отдельных сегментов бурильной трубы и оборудования низа бурильной колонны, используемого для вращения долота. Сегменты бурильной трубы и компоненты оборудования низа бурильной колонны свинчиваются и развинчиваются с помощью оборудования бурового станка, как известно из уровня техники. Среди других датчиков буровой установки могут иметься манометры и расходомеры для измерения давления и расхода бурового раствора, фактически прокачиваемого через бурильную колонну. Такие измерения помогают оператору скважины определить, поступает ли буровой раствор в скважину из пробуриваемых пород или уходит из скважины в такие породы. Мгновенное значение глубины скважины входит в число наиболее важных параметров, определяемых с помощью различных датчиков, установленных на буровом станке. Измерение глубины используется при определении геологической структуры пробуриваемых земных пород, и существуют хорошо известные способы определения подповерхностного давления пластовых флюидов, которые имеют отношение к скорости, с которой пробуриваются породы. Один из таких способов известен из уровня техники как способ "экспоненты бурения" или "d-экспоненты". D-экспонента - это количество, которое определяется относительно глубины скважины. Отношение между d-экспонентой и глубиной сравнивается с подобными соотношениями в соседних скважинах, проходящих сквозь аналогичные формации. Отклонение d-экспоненты от ожидаемой в данном месте тенденции относительно глубины является признаком неожиданно высокого или низкого давления пластовых флюидов. Реагируя на такие признаки, оператор скважины может избежать проблем, связанных с управлением при чрезмерных и опасных давлениях в скважине. Точное определение d-экспоненты основано на точном определении как глубины бурения, так и скорости, с которой изменяется глубина бурения при прохождении пород, известной как скорость проходки ("ROP"). Другое важное применение измерений мгновенного значения глубины состоит в их предельной корреляции с измерениями, выполненными приборами, связанными с бурильной колонной, и датчиками,расположенными на поверхности земли. К таким приборам относятся датчики для измерения различных физических свойств пробуриваемых формаций, таких как электрическая проводимость, скорость звука,объемная плотность и интенсивность естественного гамма-излучения. Приборы регистрируют значения,относящиеся к физическим свойствам, с указанием времени регистрации. На поверхности земли производится регистрация глубины скважины с указанием времени регистрации. После извлечения приборов из скважины привязанные ко времени записи сопоставляются с записями глубины с указанием времени. Результатом является набор данных, соотнесенный с глубиной скважины, на которой были выполнены измерения. Как известно из уровня техники, такие соотнесенные с глубиной записи физических свойств формации находят множество применений, включая определение геологических структур и определение наличия возможных аномалий давления пластовых флюидов. Так же, как в случае определения d-экспо-1 007499 ненты, определение точных записей свойств формации, соотнесенных с глубиной скважины, требует точного определения глубины с указанием времени. Системы определения глубины с указанием времени и определения скорости проходки, известные из уровня техники, далеки от идеала. Одно из ограничений, свойственных известным способам измерения глубины с измерением вертикального положения верхнего привода или ведущей бурильной трубы,состоит в том, что в них не учитывается надлежащим образом изменение осевой длины бурильной колонны в результате изменения осевой нагрузки на бурильную колонну. Обычно считается, что длина бурильной колонны практически постоянна. Часто вследствие трения скольжения между бурильной колонной и стенками скважины, наряду с другими факторами, верхний привод или ведущая бурильная труба могут сместиться на значительное расстояние, прежде чем буровое долото вообще двинется с места в аксиальном направлении. Другие способы определения глубины включают фиксированную коррекцию осевой длины бурильной колонны. Однако эти методы корректируют длину бурильной колонны только статически. В некоторых случаях бурение идет с такой большой скоростью, что сжатие (укорочение) бурильной колонны, вызванное увеличением аксиального усилия, приложенного к бурильной колонне, не вполне соответствует фактическому изменению длины бурильной колонны. Измерения глубины, известные из уровня техники и производимые только путем измерения вертикального положения,подвержены поэтому ошибкам, даже если такие измерения корректируются с учетом нагрузки бурильной колонны. Определение скорости проходки прямо связано с измерением глубины, а, следовательно,также подвержено ошибкам при использовании способов измерения глубины, известных из уровня техники. Поэтому желательно иметь систему для улучшения измерения глубины погружения долота, чтобы можно было получать более точную регистрацию глубины с указанием времени и производить более точные расчеты, основанные на измерении глубины. Другой аспект способов регистрации данных, известных из уровня техники, состоит в том, что не любые хорошо известные систематические способы измерения дают данные, наиболее пригодные для интерпретации и анализа. Во время бурения бурильная колонна и оборудование низа бурильной колонны могут подвергаться ударам, вибрации, крутильным колебаниям и завихрениям. Не говоря уже о деструктивном характере этих видов движения, данные, зарегистрированные в то время, когда бурильная колонна и оборудование низа бурильной колонны подвергаются этим движениям, могут быть менее надежными, чем при спокойном бурении. Желательно иметь способ для различения данных на основе эксплуатационных параметров бурения и характера движения, при котором данные, записанные при предпочтительных условиях бурения, могли бы быть селективно идентифицированы для анализа. Сущность изобретения В одном аспекте изобретение относится к способу определения глубины скважины. Способ включает определение изменения подвешенной нагрузки бурильной колонны между первым и вторым моментами времени. Определяют изменение осевого положения верхнего участка бурильной колонны между первым и вторым моментами времени. Ожидаемую величину сжатия бурильной колонны, связанную с изменением подвешенной нагрузки, корректируют для перемещения нижнего участка бурильной колонны за период между первым и вторым моментами времени. Положение нижнего участка бурильной колонны вычисляют по изменению осевого положения и скорректированной величине сжатия бурильной колонны. В одном варианте реализации изобретения корректировка включает оценку перемещения бурового сверла путем определения осевого движения бурильной колонны около поверхности земли в промежутке времени, в котором отсутствует изменение подвешенной нагрузки бурильной колонны. В другом аспекте изобретение относится к способу классификации данных, измеряемых в процессе буровых работ на скважине. В этом аспекте определяют первую разность значений выбранного измеряемого параметра между первым и вторым моментами времени. Определение первой разности в некоторых вариантах повторяют для других моментов времени. Значения данных приписывают набору улучшенных данных, если первая разность меньше выбранной пороговой величины. В некоторых вариантах определяют вторую разность значений данных. Значения данных приписывают набору улучшенных данных, если либо первая, либо вторая разность, либо обе разности меньше соответствующих выбранных пороговых величин. В другом варианте значения данных приписывают набору улучшенных данных, если по меньшей мере один из параметров управления бурением, измерения движения бурового инструмента, первая разность и вторая разность становятся либо выше, либо ниже выбранных пороговых величин. В следующем аспекте изобретение относится к способу выбора рабочих параметров бурения. Способ в соответствии с этим аспектом изобретения включает определение отношения между по меньшей мере одним рабочим параметром бурения и по меньшей мере одним параметром реакции на бурение. Определение отношения осуществляют в случае, если параметр, связанный с движением бурильной колонны, меньше выбранной пороговой величины. Определяют характеристики по меньшей мере одного параметра реакции на бурение и по меньшей мере одного рабочего параметра бурения в соответствии с литологией. По меньшей мере один рабочий параметр бурения и по меньшей мере один параметр реакции на бурение измеряют в ходе бурения. Литологию определяют по измеренным параметрам и по-2 007499 меньшей мере один рабочий параметр бурения выбирают для оптимизации по меньшей мере одного параметра реакции на бурение для определенной литологии. В другом аспекте изобретение относится к способу определения нарушения нормального хода бурения. Способ, соответствующий этому аспекту изобретения, включает определение отношения между по меньшей мере одним рабочим параметром бурения и по меньшей мере одним параметром реакции на бурение. Значение параметра реакции на бурение прогнозируют на основе указанного отношения и измерений рабочего параметра бурения, а наличие нарушения нормального хода бурения определяют, если спрогнозированное значение существенно отличается от измеренного значения параметра реакции на бурение. Другие аспекты и преимущества изобретения будут понятны из нижеследующего описания и формулы изобретения. Краткое описание чертежей На фиг. 1 показана типичная схема бурения скважины. На фиг. 2 показана часть типичной системы скважинных исследований в процессе бурения. На фиг. 3 показан пример оборудования нижней части бурильной колонны более подробно. На фиг. 4 показана блок-схема одного варианта способа измерения глубины скважины согласно изобретению. На фиг. 5 показана блок-схема одного варианта способа измерения глубины скважины согласно изобретению. На фиг. 6 показана блок-схема одного варианта способа определения набора улучшенных данных. На фиг. 6 А показан пример способа определения рабочего состояния бурового станка. На фиг. 7 показан пример способа управления буровыми работами с использованием улучшенных данных, характеризуемых способом по фиг. 6. На фиг. 8 показан пример использования обученной нейронной сети для прогнозирования реакции бурения в определенных формациях и использования сравнения с ней фактической реакции для обнаружения нарушений нормальной работы буровой установки. Сведения, подтверждающие возможность осуществления изобретения На фиг. 1 показана типичная схема бурения скважины, данные которой могут быть измерены и использованы в различных вариантах реализации изобретения. В буровом станке 10 имеется буровая лебедка 11 или аналогичное подъемное устройство, известное из уровня техники, для поднятия, удержания и опускания бурильной колонны. Буровая лебедка 11 для целей данного изобретения описана в сборе и содержит крюк, талевый блок, проволочный канат, наматываемый на ворот, и другие подъемные и управляющие устройства, хорошо известные из уровня техники для подъема и удержания бурильной колонны. Бурильная колонна содержит ряд свинченных секций бурильной трубы, обозначенной, в целом, номером 32, один конец которой доходит до поверхности земли. Самая нижняя часть бурильной колонны известна как оборудование низа бурильной колонны (ВНА) 42. В варианте, изображенном на фиг. 1, на самом нижнем конце ВНА 42 находится буровое долото 40, предназначенное для прохождения сквозь земные породы 13 под поверхностью земли. Буровое долото 40 может принадлежать к одному из многих типов, хорошо известных из уровня техники, включая коническую шарошку или неподвижную буровую коронку. ВНА 42 может также содержать различные устройства, такие как утяжеленная бурильная труба 34 и воротники 36 бура. ВНА 42 может также содержать один или несколько стабилизаторов 38 с установленными на них лопастями для удержания ВНА 42 приблизительно в центре скважины 22 во время бурения. В различных вариантах один или несколько воротников 36 бура могут содержать датчики для скважинных исследований во время бурения (MWD) и блок телеметрии по гидроимпульсному каналу связи. Всe вместе это называется "системой MWD" и обозначено цифрой 37. Назначение системы MWD 37 и входящих в нее датчиков будет объяснено далее со ссылками на фиг. 2. Буровая лебедка 11 управляется во время активного бурения, то есть фактического углубления скважины 22 за счет действия бурового долота 40 так, чтобы к буровому долоту 40 было приложено выбранное аксиальное усилие, известное из уровня техники как нагрузка на долото (WOB). Аксиальное усилие образуется за счет массы бурильной колонны, значительная часть которой подвешена на буровой лебедке 11, которая передает нагрузку на буровой станок 10 и, тем самым, на поверхность земли или на платформу, плавучую буровую установку при морском бурении. По меньшей мере часть неподвешенной массы бурильной колонны передается на долото 40 в виде аксиального усилия. В некоторых вариантах датчик 14 А, известный как датчик нагрузки на крюке, может использоваться для определения нагрузки,подвешенной на буровой лебедке 11. Измерение подвешенной нагрузки может использоваться оператором буровой установки для управления буровой лебедкой с целью избирательного регулирования нагрузки на долото. Назначение измерения нагрузки на крюке применительно к изобретению будет изложено ниже. Долото 40 вращается при вращении трубы 32 с использованием вкладыша бурового ротора/ведущей бурильной трубы (не показан на фиг. 1), или предпочтительно верхнего привода 14, или силового вертлюга любого типа, хорошо известного из уровня техники. Другие варианты оборудования-3 007499 низа бурильной колонны могут включать двигатель с гидравлическим приводом или гидравлический забойный двигатель (не показан), который вращает буровое долото 40. Вращение такого гидравлического двигателя может дополнять вращение, осуществляемое верхним приводом 14, или заменять его. В состав верхнего привода 14 может также входить датчик (не показан) для измерения момента, приложенного к трубе 32. В альтернативном варианте приложенный момент можно определять путем измерения электрического тока двигателя (не показан) верхнего привода 14, как хорошо известно из уровня техники. Если верхний привод 14 имеет гидравлический или пневматический привод, то момент можно определить по падению давления и расходу приводной текучей среды. Когда труба 32, а значит и ВНА 42, и долото 40 подвешены в скважине 22, насос 20 откачивает буровой раствор ("шлам") 18 из котлована или бака 24 и поднимает его по стояку или шлангам к верхнему приводу 14, так что буровой раствор 18 прокачивается через сегменты трубы 32, а затем через ВНА 42. В конце концов, буровой раствор 18 выпускается через сопла или промывочные каналы (не показаны) в долоте 40, где он поднимает выбуренную горную породу (не показана) на поверхность земли через кольцевое пространство между стенками скважины и наружной стенкой трубы 32 и ВНА 42. Затем буровой раствор 18 поднимается через кондуктор 23 к устью скважины и/или обратной линии 26. После удаления выбуренной горной породы с использованием фильтрующих устройств (не показаны на фиг. 1) буровой раствор возвращается в бак 24. На буровой лебедке 11 может быть установлен датчик 11 А для определения вертикального положения верхнего привода 14 в буровой установке. Мгновенное значение вертикального положения верхнего привода 14 комбинируется с длинами сегментов трубы 32 и длинами компонентов ВНА 42 (всe вместе"длина бурильной колонны") для определения мгновенного значения глубины погружения долота 40. Измерение глубины погружения долота в соответствии с вариантами изобретения будет описано ниже. В некоторых вариантах датчик 11 А подключен к соответствующим цепям (не показаны) в регистрирующем блоке 12 для регистрации записей глубина/время. Регистрирующий блок 12 может также регистрировать результаты измерений нагрузки на крюке от датчика 14 А и результаты измерения вращающего момента, приложенного к верхнему приводу 14. Регистрирующий блок 12 может быть любого из многих известных типов для записи показаний приборов на поверхности и/или записей MWD. Стояковая система или стояк 16 в данном варианте включает датчик давления 28, генерирующий электрические или другие сигналы давления бурового раствора в стояке 16. Датчик давления 28 оперативно подключен к устройствам (не показаны на фиг. 1) в регистрирующем блоке 12 для дешифровки,регистрации и интерпретации сигналов, поступающих от системы MWD 37. Как известно из уровня техники, система MWD 37 содержит устройство, которое будет описано ниже со ссылками на фиг. 2, для модуляции давления бурового раствора 18 и передачи избранных данных на поверхность земли. В некоторых вариантах регистрирующий блок 12 содержит телекоммуникационное устройство 44, такое как спутниковый приемопередатчик или приемопередатчик радиосвязи, для передачи данных, получаемых от системы MWD 37 и других датчиков на поверхности земли, например датчика 14 А нагрузки на крюке и датчика 11 А положения, в удаленный пункт. Такие телекоммуникационные устройства хорошо известны из уровня техники. Элементы измерения и регистрации данных, показанные на фиг. 1, включая датчик давления 28 и регистрирующий блок 12, являются только примерами систем получения и регистрации данных, которые могут быть использованы в изобретении, и, соответственно, не должны восприниматься как ограничивающие рамки изобретения. Вообще говоря, различные варианты изобретения рассчитаны на работу с регистрирующим блоком 12 или удаленным компьютером (не показан) для регистрации и интерпретации измерений, выполняемых различными описанными датчиками. Некоторые варианты содержат инструкции, записанные на электронном носителе, при исполнении которых компьютер (не показан отдельно) в регистрирующем блоке 12 осуществляет операции, которые будут описаны ниже со ссылками на фиг. 4-7. Один вариант системы MWD, показанной в общем виде под номером 37 на фиг. 1, показан более подробно на фиг. 2. Система MWD 37 обычно располагается внутри немагнитного корпуса 47, изготовленного из монель-металла или подобного материала и соединяющегося концами с бурильной колонной. Механические свойства корпуса 47 обычно такие же, как и у других воротников 36 бура (фиг. 1). В корпусе 47 расположена турбина 43, в которой поток бурового раствора 18 (фиг. 1) частично преобразуется во вращательную энергию для привода генератора 45 переменного или постоянного тока для питания различных электрических цепей и датчиков системы MWD 37. В системах MWD других типов в качестве источников электроэнергии могут использоваться батареи. Управление различными функциями системы MWD 37 может выполняться центральным процессором 46. Процессор 46 может также содержать цепи для регистрации сигналов, генерируемых различными датчиками системы MWD 37. В этом варианте система MWD 37 содержит направленный датчик 50 с трехкоординатными магнитометрами и акселерометрами, позволяющий определить ориентацию системыMWD 37 относительно северного магнитного полюса и центра земного тяготения. В систему MWD 37 может также входить детектор гамма-излучения 48 и отдельные ротационные (угловые) или аксиальные акселерометры, акустические каверномеры, магнитометры и/или тензодатчики, обозначенные, в общем, цифрой 58. Система MWD 37 может также содержать датчик удельного сопротивления с генератором/приемником-4 007499 52 индукционных сигналов, передающей антенной 54 и приемными антеннами 56 А, 56 В. Датчик удельного сопротивления может быть любого хорошо известного типа для измерения электрической проводимости или удельного сопротивления земных пород 13 (фиг. 1), окружающих скважину 22 (фиг. 1). Центральный процессор 46 периодически запрашивает каждый датчик системы MWD 37 и может сохранять ответные сигналы всех датчиков в памяти или другом устройстве хранения (не показанном отдельно), связанном с центральным процессором 46. Как известно из уровня техники, записанные сигналы датчиков индексируются относительно времени получения каждого сигнала, так что когда системаMWD 37 извлекается из скважины 22 (фиг. 1) она может быть подключена к соответствующему каналу данных (не показан) регистрирующего блока 12 (фиг. 1) для регистрации сигналов датчиков с привязкой к глубине. Записи с привязкой к глубине получают посредством сопоставления записанных данных системы MWD с индексацией по времени с записями глубины в функции времени, выполненными в регистрирующем блоке 12 (фиг. 1). Индексация записей по времени и последующее сопоставление с записями глубины в функции времени известны из уровня техники, см., например, патент США 4,216,536, выданный More. Как будет показано далее со ссылками на фиг. 4 и 5, один аспект изобретения относится к формированию улучшенных записей время-глубина в регистрирующем блоке 12 (фиг. 1). Некоторые сигналы датчиков могут быть форматированы для передачи на поверхность земли телеметрическим устройством модуляции давления бурового раствора. В варианте по фиг. 2 давление бурового раствора модулируется с помощью гидравлического цилиндра 60, расширяющего импульсный клапан 62 для ограничения потока бурового раствора через корпус 47. Ограничение потока бурового раствора увеличивает давление бурового раствора, которое измеряется датчиком 28 (фиг. 1). Работой цилиндра 60 обычно управляет процессор 46, так что выбранные данные для передачи на поверхность земли кодируются серией импульсов давления, которые воспринимаются на поверхности земли датчиком 28(фиг. 1). Из уровня техники известно много различных схем кодирования данных с помощью модулятора давления бурового раствора, такого как показан на фиг. 2. В соответствии с этим тип телеметрического кодирования не ограничивает рамок изобретения. Другие способы модуляции давления бурового раствора, которые также могут быть использованы в изобретении, включают так называемую телеметрию "отрицательных импульсов", при которой клапан мгновенно выпускает часть бурового раствора из системыMWD в кольцевое пространство между корпусом и скважиной. Такой мгновенный отвод жидкости уменьшает давление в стояке 16 (фиг. 1). Другие телеметрические системы с использованием давления бурового раствора включают так называемую "гидродинамическую сирену", при которой вращающийся клапан, расположенный в корпусе 47 системы MWD, образует стоячие волны давления в буровом растворе, которые могут быть модулированы с использованием таких методов, как манипуляция фазовым сдвигом для декодирования на поверхности земли. Безотносительно к конкретной схеме телеметрии сигналы, поступающие в регистрирующий блок 12 (фиг. 1), регистрируются и обычно индексируются относительно времени и, соответственно, относительно глубины, с которой были посланы сигналы. В некоторых вариантах каждый компонент ВНА 42 (фиг. 1) может содержать свой собственный ротационный и аксиальный акселерометр или тензодатчик. Например, возвращаясь назад к фиг. 1, каждый воротник 36 бура, стабилизатор 38 и долото 40 может иметь такие датчики. Датчики каждого компонента ВНА могут быть соединены с процессором 46 (фиг. 2) электрически или с помощью средства связи, такого как электромагнитный ретранслятор известного типа. Процессор 46 может периодически опрашивать все датчики, расположенные в различных компонентах ВНА 42, чтобы определять различные виды движений в соответствии с различными вариантами изобретения. Для целей данного изобретения как тензодатчики, магнитометры, так и акселерометры могут использоваться для выполнения измерений,относящихся к ускорениям, воздействующим на определенные компоненты ВНА в определенных направлениях. Как известно из уровня техники, вращающий момент, например, является векторным произведением момента инерции на угловое ускорение. Тензодатчик, предназначенный для измерения деформаций кручения в некотором компоненте ВНА, будет поэтому измерять величину, непосредственно связанную с угловым ускорением, приложенным к этому компоненту ВНА. Акселерометры и магнитометры обладают преимуществом большего удобства установки в различных компонентах ВНА, поскольку их реакция не зависит от точности передачи деформации компонента ВНА на акселерометр или магнитометр, как это требуется при тензодатчиках. Однако следует ясно понимать, что для определения рамок данного изобретения необходимо только, чтобы измеряемая величина относилась к ускорению описываемого компонента. Акселерометр, пригодный для измерения вращательного (углового) ускорения,должен предпочтительно устанавливаться так, чтобы направление его чувствительности было перпендикулярно оси компонента ВНА и параллельно касательной к наружной поверхности компонента ВНА. Направленный датчик 50, если он должным образом установлен в корпусе 47, должен поэтому иметь одну компоненту из трех ортогональных компонент, которая может измерять угловое ускорение системыMWD 37. Цель измерения этих ускорений и/или деформаций применительно к данному изобретению будет объяснена ниже со ссылками на фиг. 6. На фиг. 3 показан другой пример ВНА 42 А более подробно в целях пояснения изобретения. ВНА 42 А в этом примере содержит компоненты, включая долото 40, которые могут быть любого типа, известного из уровня техники, для бурения земных пород: ближайший к долоту, или первый, стабилизатор-5 007499 38, воротники 36 бура, второй стабилизатор 38 А, который может быть того же или другого типа, чем первый стабилизатор 38, и утяжеленную бурильную трубу 34. Каждая из этих секций ВНА 42 А может быть идентифицирована по своей полной длине, как показано на фиг. 3. Долото 40 имеет длину С 5, первый стабилизатор 38 имеет длину С 4, и так далее, как показано на фиг. 3. Полная длина всего устройства ВНА 42 А обозначена С 6. Как указано в разделе "Предшествующий уровень техники" и как можно заключить из вышеприведенных пояснений со ссылками на фиг. 1 и 2, важным аспектом измерения параметров, относящихся к процессу бурения, и измерения свойств геологической структуры с использованием системы MWD 37(фиг. 1) является точное соответствие между результатами измерения и фактической глубиной бурового долота 40 (фиг. 1) в скважине 22 (фиг. 1). Как известно из уровня техники, вертикальное расстояние бурового долота 40 от поверхности земли, известное из уровня техники как истинная вертикальная глубина "TVD", может быть определено по длине бурильной колонны, погруженной в скважину 22 (фиг. 1), и фактической траектории скважины 22 (фиг. 1). Траектория скважины может быть определена путем измерения угла наклона и азимута в выбранных положениях, или выполняемого непрерывно вдоль скважины с использованием хорошо известных способов съемки и методов вычислений. Напротив, глубина погружения долота, отнесенная к длине бурильной колонны, погруженной в скважину, известна как "измеренная глубина". Независимо от того, используется ли в конкретном случае в качестве индекса глубина TVD или измеренная глубина, важно иметь возможность точно определить глубину погружения долота в любой момент времени. Один из вариантов способа определения измеренной глубины относительно времени объясняется со ссылками на блок-схему по фиг. 4. В процессе бурения записи производятся как в регистрирующем блоке 12 (фиг. 1), так и в отдельном регистраторе данных (не показан), с учетом времени выполнения измерения каждым из датчиков на буровом станке 10 (фиг. 1). В записи датчиков входят записи вертикального положения верхнего привода или ведущей бурильной трубы, сделанные датчиком положения 11 А (фиг. 1), и записи подвешенной нагрузки бурильной колонны, сделанные датчиком 14 А нагрузки на крюке (фиг. 1). В некоторых вариантах дополнительный датчик (не показан) может измерять скорость вращения верхнего привода 14 (фиг. 1) или бурильной колонны, например, в столе ведущей бурильной трубы, в буровых установках типа ведущей бурильной трубы. Скорость вращения обозначается RPM. В других вариантах RPM может вычисляться на основании измерений, выполняемых магнитометрами в системе MWD 37 (фиг. 2). На этапе 60 по фиг. 4 регистрируются в функции времени вертикальное положение крюка или вертикальное положение верхнего привода, обозначенное DBM(t), нагрузка на крюке, обозначенная H(t),скорость вращения бурильной колонны, обозначенная RPM(t). Для определения глубины в этом варианте, как показано на этапе 62, устанавливаются следующие величины либо посредством моделирования с использованием вводов, либо с помощью измерений, выполненных датчиками на буровом станке. Моделирование может включать использование инженерной программы бурения скважин, реализуемой под торговым названием WELLPLAN фирмой LandmarkGraphics, Houston, TX. Среди величин, которые требуется установить, могут быть вес блока, то есть вес верхнего привода или оборудования на крюке, свободно вращающийся вес, то есть вес бурильной колонны, компенсированный с учетом ее плавучести в бурильном растворе, трение блока, то есть сила трения, необходимая для перемещения верхнего привода вверх и вниз, которая может также быть связана со скоростью движения верхнего привода, скорость блока, то есть аксиальная скорость движения верхнего привода или оборудования на крюке, скорость вращения (RPM) и торможение, то есть силы трения между стенками скважины и бурильной колонной при аксиальном движении. В результате получения какихлибо или всех перечисленных параметров можно определить ожидаемую нагрузку на крюке в условиях вращательного и/или аксиального движения бурильной колонны при нормальном трении о стенки скважины. Ожидаемая нагрузка на крюке в условиях вращения известна как "нижний вес вращения" (DWR). Датчик RPM запрашивается на этапе 64. Если скорость вращения бурильной колонны RPM(t) больше нуля, режим бурения считается "вращательным" или "роторным" бурением, и процесс вычислений продолжается, как показано на фиг. 4. Если бурильная труба не вращается (RPM(t) равна нулю),процесс продолжается, как будет показано ниже со ссылками на фиг. 5. На вход процесса поступают на момент выполнения вычислений (t) значения кажущейся глубины погружения долота D(t), которые связаны с вертикальным положением верхнего привода (высота блока) в момент t и с кажущейся (некорректированной) аксиальной длиной бурильной колонны. На вход поступает также измеренное значение нагрузки на крюке H(t). Как указывалось выше, эти величины измерялись на этапе 60. Когда бурильная колонна движется вниз в скважине и вращается в условиях, когда нагрузка на крюке больше или равна ожидаемой нагрузке на крюке в момент измерения, а именно H(t)DWR(t), то откорректированная глубина погружения долота DAM(t) устанавливается равной кажущейся глубине погружения долота, или DAM(t)=D(t). Это показано на этапе 66 по фиг. 4. На этапе 66 по фиг. 4 для интервалов времени, когда H(t) меньше, чем DWR(t), в данном варианте значения H(t) сканируются в определенные моменты времени перед временем измерения, чтобы определить локальные максимумы и минимумы H(t). Моменты времени и значения нагрузки на крюке, при ко-6 007499 торых эти максимумы и минимумы имеют место, могут быть идентифицированы как H(t)max и H(t)min. Это показано на этапе 68 по фиг. 4. Затем, как показано на этапе 70 по фиг. 4, определяется разность значений нагрузки на крюке между локальным минимумом и последующим максимумом нагрузки на крюке Н(t)max-H(t)min,Разность нагрузок на крюке из этого уравнения сравнивается с выбранной пороговой величиной,как показано на этапе 72 по фиг. 4. Если эта разность меньше выбранной пороговой величины, то минимальное значение H(t)min не используется для поправочных коэффициентов сжатия при вычислении длины бурильной колонны, и ищется другое значение минимума нагрузки на крюке, как показано на этапе 74. Пороговая величина должна быть связана с изменениями нагрузки на долоте (аксиальное усилие), выполняемыми оператором буровой установки (буровым мастером) во время работы на буровой установке. Если пороговая величина превышена, нагрузки на крюке сканируются назад от момента минимальной нагрузки на крюке H(t)min, пока не будет найдено такое значение нагрузки на крюке, которое будет больше или равно значению максимальной нагрузки на крюке, следующей за минимальной нагрузкой на крюке. Определяется интервал времени между последующим максимумом нагрузки на крюке и найденной предыдущей нагрузкой на крюке. Если этот интервал времени больше выбранной пороговой величины, то ищется другое минимальное значение среди измерений нагрузки на крюке. Если предыдущий максимум больше последующего максимума, то следующее меньшее значение нагрузки на крюке используется с предыдущим максимумом для интерполяции ожидаемого времени, при котором нагрузка на крюке будет в точности такой, как последующий максимум нагрузки на крюке. Это время можно обозначить, как время предыдущего максимума нагрузки на крюке (t)pmx. Кажущаяся глубина погружения долота в момент предыдущего максимума нагрузки на крюке, обозначаемая как D(t)pmx, должна также быть интерполирована по измерениям кажущейся глубины погружения долота в функции времени. Кажущаяся скорость погружения в момент минимума нагрузки на крюке может быть получена из выраженияROP(t)min=(D(t)max-D(t)pmx)/(tmax-tpmx),Теперь сжатие бурильной колонны, отрегулированное с учетом движения долота во время минимальной нагрузки на крюке, K(t)min, можно определить из следующего уравненияK(t)min=(D(t)min-D(t)pmx-(ROP(t)minx(tmin-tpmx/(H(t)max-H(t)min). Значения K(t)min, полученные из вышеприведенного уравнения, можно затем линейно интерполировать применительно к глубине. Это показано на этапе 61 по фиг. 4.DAM(t)=D(t)-K(t)x(DWR(t)-H(t Коррекция глубины погружения долота показана на этапе 63 по фиг. 4. Возвращаясь к этапу 64 по фиг. 4,если RPM равна нулю, то режим бурения называется "безроторным". Безроторное бурение, как известно из уровня техники, производится при определенных условиях с использованием двигателя, работающего от потока бурового раствора, расположенного в ВНА. Такие двигатели известны из уровня техники как"гидравлические забойные двигатели". Если режим бурения безроторный, то могут быть определены различные ожидаемые нагрузки на крюк, называемые DWS(t), с использованием модели при введении данных пользователя или применении данных датчика бурового станка, как описано выше применительно к фиг. 4. Как следует из фиг. 5,при скольжении для интервалов, когда ожидаемая нагрузка на крюк равна или больше ожидаемой нагрузки на крюк, когда бурильная колонна скользит вниз в аксиальном направлении, откорректированная глубина погружения долота может быть приравнена кажущейся глубине погружения долота, так же как в предыдущем случае вращательного бурения. Это для общего случая показано на этапах 67 и 69 по фиг. 5. В интервалах, когда H(t) меньше DWS(t), процесс идет практически так же, как описано выше применительно к вращательному бурению. На этапе 71 значения H(t) сканируются в поисках локальных максимумов и минимумов. Значения скорости изменения нагрузки на крюк с учетом глубины вычисляются,как показано на этапе 73. На этапе 75 величина сжатия бурильной колонны корректируется с учетом скорости проникновения бурильного долота, и, наконец, на этапе 77 определяются откорректированные значения глубины DAM(t) для каждого выбранного момента времени. Откорректированные значения глубины относительно времени, DAM(t), могут теперь быть использованы для пересчета чистого времени режимов бурения, а также новых кривых скорости проходки(ROP), характеристик обрабатываемых геологических структур, регистрируемых во время бурения(LWD), и других расчетов, таких как экспоненты бурения (d-экспоненты), литология и поровое давление. Поровое давление в некоторых вариантах может определяться по экспоненте бурения, как хорошо известно из уровня техники. В соответствии с фиг. 6 другой аспект изобретения относится к классификации данных, чтобы улучшить интерпретацию выбранных данных. Запись каждого типа данных, выполняемая регистрирующим блоком 12 (фиг. 1) в каждый момент времени t, может выражаться в форме записи f(t). Таким образом, полная запись данных включает на этапе 96 по фиг. 6 значения различных зарегистрированных параметров, соответствующих каждому времени регистрации. Записи могут включать значения параметров, измеренных датчиками на поверхности земли, включая, например, датчик положения верхнего привода, датчик нагрузки на крюке и датчик момента. Записи могут также включать значения параметров,измеренных различными датчиками в системе MWD 37 (фиг. 1), передаваемых с помощью гидроим-7 007499 пульсной телеметрии, как описано выше. Записи могут также включать значения параметров, зарегистрированных в системе MWD 37 (фиг. 1) и переданных в регистрирующий блок 12 (фиг. 1) после поднятия системы MWD из скважины. В других вариантах в систему MWD может входить система передачи сигналов от датчиков в регистрирующую систему практически в реальном времени. Такие системы связи в реальном времени могут быть реализованы там, где сегменты труб 32 (фиг. 1) содержат коммуникационную линию с электромагнитной связью, подобную той, которая описана в опубликованной заявке на патент США 20020075114 А 1, Hall и др. Бурильная труба, описанная в заявке Hall и др., содержит электромагнитно связанные провода в каждом сегменте буровой трубы и некоторое количество повторителей сигнала, расположенных в выбранных положениях вдоль бурильной колонны для передачи на поверхность земли сигналов от приборов, расположенных в скважине. В процессе, соответствующем этому аспекту изобретения, данные предпочтительно распределяются по категориям в соответствии по меньшей мере с одной из первых разностей другого измерения f(t),как будет более подробно изложено ниже, со второй разностью другого измерения f(t), как будет более подробно изложено ниже, типом операции, имеющей место в буровом станке 10 (фиг. 1), которая может относиться к глубине погружения долота, определенной предыдущим способом, описанным применительно к фиг. 4 и 5, характером движения бурильной колонны, определенным по значениям некоторых параметров ускорения, и присоединенной литологией, определенной методами, хорошо известными из уровня техники. В данном варианте на этапе 98 для каждого значения параметра f(t) может быть определена первая разность f(t) между значением каждого параметра и непосредственно предшествующим ему значением этого параметра. Значение второй разности (f(t между значением текущей первой разности и значением первой разности при последующем измерении параметра также может быть определено(f(t=f(t+1)-f(t) В некоторых вариантах, если значение первой разности превышает предварительно заданное пороговое значение, показанное на этапе 100 по фиг. 6, то измеренное значение параметра в момент времени t не присваивается набору улучшенных данных, и репрезентативное значение f'(t) приравнивается к значению, присваиваемому по умолчанию, такому как нуль. Это показано в общем виде на этапе 116 по фиг. 6. Примером измеренного параметра, который может быть выделен на основе первой разности, является скорость движения верхнего привода 14 (фиг. 1). Другим примером параметра, который может быть выделен с использованием первой разности, может служить скорость вращения бурильной колонны RPM. Первая разность по глубине сигнала гамма-излучения породы, измеренного в скважине с использованием датчиков системы MWD 37 (фиг. 1), преобразованная во временной промежуток с использованием преобразования глубина-время, известного из уровня техники, также может быть использована для выделения данных, которые должны быть включены в комплект улучшенных данных. Другим примером параметра, который может быть выделен с использованием первой разности, является вращающий момент,приложенный к бурильной колонне верхним приводом и измеренный на поверхности. Первая разность вращающего момента, измеренная в скважине с использованием датчиков системы MWD 37 (фиг. 1),также может быть использована для выделения данных, которые должны быть включены в комплект улучшенных данных. В некоторых вариантах, если значение первой разности и/или второй разности превышает предварительно заданное пороговое значение, показанное на этапе 100 по фиг. 6, то текущее значение f(t) параметра может быть включено как значение, присваиваемое по умолчанию, такое как нуль, в улучшенные данные f'(t), как показано на этапе 116 по фиг. 6. Следует иметь в виду, что тип улучшенных данных может отличаться от типа данных, используемых для определения первой и второй разности. Примеры параметров, которые могут быть выделены с использованием первой и второй разности, включают вертикальное положение верхнего привода, называемого также "высотой блока", и вращательную ориентацию бурильной колонны, которая может измеряться на поверхности или с использованием датчиков системы MWD 37 (фиг. 1). В некоторых вариантах классификация данных может быть улучшена за счет определения режима бурения с использованием различных параметров управления бурением, таких как, но не только, скорость вращения бурильной колонны (RPM), подача насоса (расход), скорость проходки (ROP) и осевая скорость верхнего привода, показанные в общем виде на этапе 102 по фиг. 6. Например, при ненулевом значении ROP и положительном значении RPM данные могут классифицироваться как записанные во время "вращательного бурения". Если ROP, определенная способом, показанным на фиг. 4 и 5, равна нулю или RPM равна нулю, то записанные данные не репрезентативны по отношению к данным, записанным при вращательном бурении скважины. На этапе 104 по фиг. 6, если данные классифицированы как зарегистрированные не во время вращательного бурения, значение улучшенных данных в момент t для параметра, представляемого f'(t), могут быть приравнены к значению, присваиваемому по умолчанию, такому как нуль, как показано на этапе 116 по фиг. 6. В некоторых вариантах различные режимы бурильных операций, например спуск трубы, подъем трубы, расширение скважины вперед, расширение-8 007499 скважины назад, могут использоваться для различения, следует или не следует в конечном счете включать измеренные данные в комплект улучшенных данных. Некоторые варианты повышения качества данных, используемых в последующем анализе, различают данные, основанные на литологии, в связи с данными, полученными на различных интервалах времени, например литологию, пробуренную в момент времени t, как показано на этапе 106 по фиг. 6. Часто литология регистрируется датчиками геологической структуры на отрезке глубины. Преобразование глубина-время и обратные преобразования время-глубина, хорошо известные из уровня техники, могут потребоваться, чтобы использовать литологию для различения данных на временном промежутке в произвольный момент времени t. На этапе 108 по фиг. 6, если данные классифицированы как не соответствующие конкретной литологии, значение улучшенных данных в момент t для параметра, представляемого f'(t), может быть приравнено к значению, присваиваемому по умолчанию, такому как нуль, как показано на этапе 116 по фиг. 6. Некоторые варианты расчета набора улучшенных данных включают различение данных в зависимости от того, получены ли они, когда бурильная колонна находилась в режиме движения, при котором часть энергии бурения рассеивалась на передачу энергии бурильной колонне и/или в сторону скважины,вместо того, чтобы эффективно передавать энергию бурения на буровое долото, или нет. Примерами таких диссипативных режимов бурения могут служить вихревое движение, поперечные колебания, продольные колебания, удары, прихватывание, крутильные колебания и т.д. В данном примере, показанном на фиг. 6, измеряется параметр, относящийся по меньшей мере к одной из следующих величин: угловое ускорение, продольное ускорение и поперечное ускорение. Это показано на этапе 110 по фиг. 6. Все эти параметры могут быть измерены на поверхности или с помощью различных датчиков в системе MWD 37(фиг. 1). Например, вертикальное положение верхнего привода 14 (фиг. 1) может быть измерено и дважды продифференцировано по времени, чтобы получить значение продольного ускорения бурильной колонны около поверхности земли. В других вариантах может использоваться датчик ускорения или тензодатчик, присоединенный к верхнему приводу или крюку. Соответственно, ускорение вдоль оси бурильной колонны может непосредственно измеряться датчиками в системе MWD 37 (фиг. 1). В качестве другого примера, крутящий момент может измеряться на поверхности земли и вариации крутящего момента могут использоваться как индикаторы углового ускорения бурильной колонны. В альтернативном варианте крутящий момент и/или угловое ускорение могут измеряться различными датчиками в системеMWD 37 (фиг. 1). В качестве еще одного примера поперечные ускорения бурильной колонны могут измеряться различными датчиками в системе MWD 37 (фиг. 1). На этапе 112 по фиг. 6 измеренный параметр, относящийся к одному или нескольким ускорениям,сравнивается с выбранным пороговым значением. Пороговое значение зависит от конкретного измеряемого параметра, отнесенного к ускорению. Если на этапе 112 параметр не превышает выбранное пороговое значение, то значения, измеренные датчиком в этот момент времени, могут быть включены в набор улучшенных данных, где f'(t)=f(t), как показано на этапе 114 по фиг. 6. Если отнесенный к ускорению параметр превышает выбранное пороговое значение на этапе 112 по фиг. 6, то значения данных в наборе улучшенных данных могут быть приравнены к значению, присваиваемому по умолчанию, такому как нуль, как показано на этапе 116 по фиг. 6. К примерам параметров бурения и/или оценки горной породы, которые могут различаться, на предмет включения их в набор улучшенных данных, с использованием предыдущих вариантов относятся скорость вращения бурильной колонны (RPM), подача бурового насоса или расход бурового раствора,давление в стояке (буровой раствор), аксиальное усилие на долоте (WOB), измеренное либо на поверхности, либо в скважине, скорость проходки (ROP), вращающий момент, приложенный к бурильной колонне на поверхности, и др. Одна из целей выбора данных для включения в набор так называемых "улучшенных" данных в соответствии с этим аспектом изобретения состоит в том, чтобы определить данные, связанные с предпочтительными интервалами бурения при предпочтительных условиях бурения, чтобы улучшить интерпретацию, опирающуюся на эти избранные данные. Например, результаты измерения плотности геологической структуры, выполненные датчиками системы MWD 37 (фиг. 1), в наборе улучшенных данных могут более точно характеризовать фактические свойства геологической структуры, если датчик одинаковым образом контактирует с измеряемой структурой или ориентирован на нее. В качестве другого примера,измерения нагрузки на долото, вращающего момента на долоте, скорости вращения (RPM) долота или скорости проходки могут не быть репрезентативными в отношении сил, требующихся для бурения определенной породы, если бурильная колонна подвергается значительным продольным, угловым и/или поперечным вибрациям. В соответствии с этим в одном варианте значения первой и второй разностей значений вращающего момента, зарегистрированного на поверхности, и угловое и/или продольное и поперечное ускорения, зарегистрированные в системе MWD 37 (фиг. 1), сравниваются с выбранным пороговым значением. Значения первой и/или второй разности, превышающие выбранные пороговые величины, свидетельствуют о том, что ВНА и/или бурильная колонна подвергаются чрезмерной вибрации, или"прихватыванию", или "завихрению". Значения данных, зарегистрированные во время таких нежелательных(диссипативных) движений бурильной колонны, могут быть исключены из методов предпочтительной интерпретации, таких как расчеты экспоненты бурения и порового давления, известные из уровня техники. Важным применением формирования набора "предпочтительных" данных, описанного выше со ссылками на фиг. 6, является создание входных данных для обучения нейронной сети или нечеткого логического алгоритма для оптимизации и/или управления эксплуатационными параметрами бурения и/или для того, чтобы выбрать конструктивные параметры гидравлического забойного двигателя и/или бурового долота. Использование набора предпочтительных данных для создания искусственной нейронной сети (ANN) показано на этапе 118 по фиг. 6. Методы обучения нейронных сетей для управления рабочими параметрами бурения и конструктивными параметрами долота изложены в патенте США 6,424,919 В 1,Моran и др., включенным в настоящее описание в виде ссылки. В вариантах настоящего изобретения контролируемые по времени значения управляющих параметров используются для обучения нейронной сети с целью оптимизации буровых характеристик, включая нагрузку на долоте, расход бурового раствора и скорость вращения долота. Во время обучения нейронной сети значения управляющих параметров регистрируются относительно выходного параметра. В некоторых вариантах выходным параметром может быть, например, стоимость на единицу пробуренной глубины. В других вариантах выходным параметром может быть величина крутящего момента на поверхности. В вариантах настоящего изобретения для обучения нейронной сети используются только данные из предпочтительного набора данных. Преимуществами методов обучения нейронной сети в соответствии с настоящим изобретением могут быть сокращение времени обучения и улучшенная корреляция между управляющими и выходными параметрами, поскольку используются более надежные и репрезентативные значения управляющих параметров. Пример процесса управления бурением с использованием "улучшенных" данных, например, охарактеризованных в примере по фиг. 6, показан на фиг. 7. На фиг. 7 на этапе 120 рабочие параметры бурения и параметры реакции на бурение могут быть коррелированны по глубине в скважине, на которой зарегистрирован каждый параметр с учетом времени. Примерами рабочих параметров бурения могут служить нагрузка на долоте, расход бурового раствора и скорость вращения (RPM) буровой колонны, но не только они. Упомянутые параметры считаются рабочими параметрами бурения, потому что ими непосредственно управляет или их выбирает оператор буровой установки. К параметрам реакции на бурение относятся, например, скорость проходки, крутящий момент и ускорения (продольное, крутильное, поперечное и/или кручение), испытываемые различными компонентами бурильной колонны. Упомянутые параметры считаются параметрами реакции, потому что они являются результатом рабочих параметров бурения, конфигурации бурильной колонны, свойств пробуриваемой земной породы и других факторов,а поэтому оператор буровой установки обычно не может непосредственно управлять ими. Следует отметить, что в некоторых буровых установках имеются устройства, позволяющие оператору буровой установки выбирать величину крутящего момента, приложенного к бурильной колонне на поверхности. В таких буровых установках крутящий момент на поверхности фактически является рабочим или управляющим параметром бурения. На этапе 122 по фиг. 7 в программу корреляции вводятся данные, относящиеся к составу и механическим свойствам различных земных пород, через которые проходит скважина. Обычно данные, относящиеся к составу и механическим свойствам земных пород ("литологические" данные), регистрируются относительно глубины скважины, если они регистрируются с использованием так называемых "проводных" каротажных инструментов. Чтобы использовать отнесенные к глубине данные для целей управления бурением, желательно, чтобы литологические данные, как это показано на этапе 124 данного варианта, были преобразованы из отнесенных к глубине в отнесенные ко времени как результаты различных параметров бурения. Таким образом, отнесенные ко времени данные по составу и механическим свойствам породы могут быть сопоставлены с рабочими параметрами бурения и параметрами реакции на бурение, соответствующими времени проходки через соответствующие породы. Преобразование параметров из отнесенных к глубине в отнесенные ко времени делает в результате более эффективным применение литологических данных при анализе, используемом для управления операциями бурения, как будет показано далее. К примерам данных, которые могут быть использованы для характеристики земных пород в соответствии с их составом и механическими свойствами (литологией), относятся описание бурового шлама, экспонента бурения, твердость породы, электрическое удельное сопротивление, естественное гамма-излучение, пористость по данным нейтронного каротажа, насыпная плотность, время прохождения акустического интервала и др. Следует отметить, что изменение индексирования литологических данных с глубины на время может потребовать некоторой интерполяции значений данных между зарегистрированными значениями. Методы интерполяции хорошо известны из уровня техники и включают линейный и кубический сплайн. Принятая форма интерполяции не ограничивает рамок изобретения. Следует также полагать, что литологические данные могут регистрироваться во время бурения скважины с помощью хорошо известных датчиков MWD. Данные MWD обычно регистрируются относительно времени, однако, скорость записи может отличаться от измерения образцов и скорости записи датчиков, расположенных на поверхности земли, и измерения, выполненные различными датчиками в любое время, относятся к формациям с различным смещением по глубине. Поэтому данные MWD по геологической структуре должны быть корре- 10007499 лированны на отрезке глубины, затем преобразованы обратно во временной интервал и должна быть произведена новая выборка для получения практически такой же "плотности" регистрации данных (числа проб на единицу времени) как данные бурения, зарегистрированные как в скважине, так и на поверхности земли. На этапе 126 по фиг. 7 производится "улучшение" рабочих параметров бурения, параметров реакции на бурение и литологических данных, например, как описано выше со ссылками на фиг. 6, чтобы определить, пригодны ли данные для использования при последующем анализе. Данные, относящиеся к моментам времени, во время которых бурильная колонна подвергается чрезмерным ускорениям, или данные, слишком сильно изменяющиеся между соседними измерениями, могут исключаться из дальнейшей обработки, как показано на этапе 128. Данные, зарегистрированные при сравнительно небольших расхождениях и/или при движении бурильной колонны без ускорений, отбираются для дальнейшей обработки. В рассматриваемом варианте на этапе 130 по фиг. 7 данные, записанные в то время, когда бурение велось в режиме "безроторного" бурения, можно отделить от данных, записанных, когда бурение велось в режиме "вращательного" бурения. Чтобы разделить данные в соответствии с этим, необходимо определить режим работы буровой установки во время записи данных, как хорошо известно из уровня техники. Примерный процесс определения режима работы буровой установки показан на фиг. 6 А. Чтобы выполнить процесс, показанный на фиг. 6 А, измеряются некоторые параметры, такие как положение долота(положение крюка), максимальная глубина скважины, нагрузка на крюке, производительность буровых насосов, которая измеряется либо счетчиком ходов поршня, известным из уровня техники, либо путем измерения давления бурильной колонны, и скорость вращения (RPM) верхнего привода или бурового ротора. Процесс начинается на этапе 190. Например, на этапе 192 булева процедура запрашивает, больше ли нуля производительность или давление на выходе буровых насосов. Если нет, а положение долота изменяется в результате движения крюка или изменения нагрузки на крюке, положение долота выше,чем полная глубина скважины, и бурильная колонна не вращается (RPM=0), режим бурения определяется как ввод трубы или вывод трубы, то есть спуск трубы в скважину или подъем трубы из скважины, на этапе 194. В другом примере, когда выход бурового насоса не нулевой (этап 196), процедура запрашивает, больше ли нуля изменение глубины погружения долота во времени, глубина погружения долота меньше полной глубины скважины, и бурильная колонна не вращается. Если при этих дополнительных условиях положение долота не изменяется (этап 198), режим определяется как прокачивание бурового раствора по замкнутой системе. Другой пример, когда положение долота увеличивается или постоянно,давление бурового насоса больше нуля, а положение долота равно полной глубине скважины. При этих условиях на этапе 204 запрашивается скорость вращения верхнего привода. Если эта скорость больше нуля (этап 208), то режим бурения вращательный. Если эта скорость равна нулю (этап 206), то режим бурения безроторный. Другой пример, когда измеренная нагрузка на крюке практически равна весу верхнего привода, давление бурильного насоса, измеренное датчиком 28 по фиг. 1, равно нулю и RPM равна нулю, а положение долота меньше глубины скважины. При этих условиях режим бурения определяется как "сползание" во время таких операций, как добавление дополнительной длины бурильной колонны. Вышесказанное является только несколькими примерами определения режимов бурения путем опроса выбранных значений параметров. Для целей этого аспекта изобретения важными рабочими режимами буровой установки являются роторное бурение и безроторное бурение. Вернемся на этап 132 по фиг. 7, где комбинации параметров реакции на бурение и рабочих параметров бурения характеризуются относительно наиболее вероятной литологии или свойств геологической структуры. Определение наиболее вероятной литологии или свойств геологической структуры для комбинации параметров реакции на бурение и рабочих параметров бурения может производиться, например, путем использования искусственной нейронной сети, байесовской сети, регрессивного анализа,анализа функции ошибок и других методов, применяемых в технике для определения параметров. В результате измерение отдельных реакций на бурение для отдельных рабочих параметров бурения может позволить определить литологию только по измерению рабочих параметров бурения и параметров реакции на бурение. К реакциям бурения, как указывалось выше, могут относиться скорость проходки, момент вращения бурильной колонны и ускорения (продольное, крутильное, поперечное и/или кручение) бурильной колонны. На этапе 134 данные бурения характеризуются в соответствии с различными типами формаций, проходимых при бурении, как полученные из источников получения данных, хорошо известных из уровня техники, таких как (но не только) "проводные" линии геофизических исследований скважин, анализ (литологическое описание) бурового шлама, возвращенного на поверхность земли с буровым раствором, керны, выбуренные в различных формациях, и/или оценка данных, полученных датчиками MWD. Данные бурения разделяются в соответствии с этим на группы по режимам бурения, сходству состава и/или механическим свойствам. Как могут оценить специалисты в данной области, такое разделение может включать разделение на группы, имеющие типичные составы геологической формации,связанные с бурением скважины, такие как "твердые породы", "мягкие породы", "глинистые сланцы","песчаники", "известняки" и "доломиты". Эта классификация приведена только для примера и не должна ограничивать классификацию различных литологий, используемую в конкретной реализации способа в соответствии с этим аспектом изобретения.- 11007499 На этапе 136 определяется предпочтительный набор рабочих параметров бурения для каждой литологии. Предпочтительный набор рабочих параметров бурения может быть определен, например, когда скорость проходки максимальна, а поперечные, продольные, крутильные и вихревые ускорения бурильной колонны минимальны для каждой литологии. Определение предпочтительных рабочих параметров бурения может производиться, например, с использованием искусственной нейронной сети, байесовской сети, регрессивного анализа, анализа функции ошибок и других методов, применяемых в технике для оптимизации. На этапе 138 во время фактического бурения скважины производятся измерения рабочих параметров бурения и параметров реакции на бурение. На этапе 140 результаты измерения рабочих параметров бурения и параметров реакции на бурение отбираются, как описано выше со ссылками на фиг. 6. Если результаты измерения не удовлетворяют критериям отбора, используемым при отборе улучшенных данных, как показано на этапе 142, то значения рабочих параметров бурения, имеющиеся к моменту отбора,можно корректировать. Если результаты измерений бурения удовлетворяют критериям отбора данных для набора улучшенных данных, то процесс продолжается. На этапе 144 определяется рабочий режим бурения, роторный или безроторный. На этапе 146 определяется наиболее вероятная литология по рабочим параметрам бурения и параметрам реакции на бурение. На этапе 148 предпочтительный набор рабочих параметров бурения используется для управления буровым станком 10 (фиг. 1) в соответствии с литологией, определенной на этапе 146. На фиг. 8 показан пример использования измерений реакции на бурение, характеристики литологии и измерений рабочих параметров бурения для предсказания реакции на бурение. Предсказанную реакцию бурения можно сравнить с фактической реакцией на бурение для определения нарушения нормального хода бурения. На фиг. 8 показана измеренная скорость проходки в виде кривой 150. Кривая 152 изображает скорость проходки, рассчитанную обученной искусственной нейронной сетью (ANN). Как показано в верхней части фиг. 8, ANN может обучаться посредством ввода рабочих параметров бурения,таких как вес 156 на долоте и вращающий момент 158. Среди других рабочих параметров бурения могут быть, например, RPM расход бурового раствора. Как известно из уровня техники, весовые коэффициенты на скрытом уровне 160 ANN подбираются так, чтобы реакция, в данном примере это скорость проходки 162, наиболее близко совпадала с фактической реакцией для конкретного набора входных параметров ANN, в данном примере веса 156 и крутящего момента 158. Кривая 154 на фиг. 8 изображает предсказанную реакцию на бурение, вычисленную обученнойANN при подаче на вход рабочих параметров бурения. Фактическая реакция на бурение 150 сравнивается с предсказанной (спрогнозированной) реакцией. Интервалы, показанные под номером 164, в которых наблюдается существенное расхождение между предсказанной и измеренной реакцией на бурение, могут свидетельствовать о неисправности. Примерами неисправностей могут служить, например, износ бурового долота, износ или поломка частей бурильной колонны, неожиданное изменение литологии и неожиданное ускорение бурильной колонны. В некоторых вариантах указания на неисправность при бурении могут использоваться для выдачи сигнала тревоги или другого напоминания оператору бурильной установки или оператору скважины о неполадке. Варианты системы и способа, соответствующие различным аспектам изобретения, могут способствовать сокращению времени корреляции глубины, повышению точности определения глубины погружения долота и глубины скважины, более правильному определению скорости проходки и относящихся к ней параметров, улучшению выбора рабочих параметров бурения по улучшенным данным бурения и улучшению обнаружения неисправностей при бурении по улучшенным данным бурения. Все вышеописанные варианты реализации изобретения, а также другие варианты могут быть включены в виде логических инструкций в программы управления компьютером. Логические инструкции могут храниться на любых машиночитаемых носителях информации, известных из уровня техники. Ввиду того, что изобретение описано со ссылками на ограниченное число вариантов реализации,для специалиста, ознакомившегося с настоящим описанием, будет очевидно, что могут быть созданы и другие варианты, не выходящие за рамки раскрытого изобретения, которые определены только формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ выбора рабочих параметров бурения, в котором определяют характеристики по меньшей мере одного параметра реакции на бурение в соответствии с литологией, причем определение характеристик осуществляют, если параметр, связанный с диссипативным движением бурильной колонны, меньше выбранной пороговой величины; измеряют в процессе бурения указанный по меньшей мере один параметр реакции на бурение; определяют литологию по измеренному параметру реакции на бурение; и выбирают по меньшей мере один рабочий параметр бурения для оптимизации по меньшей мере одного параметра реакции на бурение, если параметр, связанный с диссипативным движением бурильной колонны, меньше выбранной пороговой величины для определенной литологии.- 12007499 2. Способ по п.1, отличающийся тем, что параметр реакции на бурение, оптимизированный в процессе бурения, тождественен параметру реакции на бурение, имеющему характеристики, определенные в соответствии с литологией. 3. Способ по п.1, отличающийся тем, что определение характеристик включает измерение по меньшей мере одного свойства, относящегося по меньшей мере к одному составу или механическим свойствам земных пород, и определение отношения между рабочим параметром бурения и параметром реакции на бурение в породах, имеющих сходную литологию. 4. Способ по п.3, отличающийся тем, что по меньшей мере одно свойство является либо литологическим описанием, либо твердостью породы, либо электрическим удельным сопротивлением, либо временем прохождения акустического интервала, либо естественным гамма-излучением, либо пористостью по данным нейтронного каротажа, либо насыпной плотностью. 5. Способ по п.1, отличающийся тем, что по меньшей мере один рабочий параметр бурения является либо нагрузкой на долото, либо скоростью вращения, либо расходом бурильного раствора. 6. Способ по п.1, отличающийся тем, что по меньшей мере один параметр реакции на бурение является либо скоростью проходки, либо ускорением бурильной колонны. 7. Машиночитаемый носитель, на который записана программа, содержащая логику, при исполнении которой программируемый компьютер осуществляет следующие операции: определение характеристик по меньшей мере одного параметра реакции на бурение в соответствии с литологией, причем определение характеристик осуществляется, если параметр, связанный с диссипативным движением бурильной колонны, меньше выбранной пороговой величины; измерение в процессе бурения указанного по меньшей мере одного параметра реакции на бурение; определение литологии по измеренному параметру реакции на бурение; и выбор по меньшей мере одного рабочего параметра бурения для оптимизации по меньшей мере одного параметра реакции на бурение, если параметр, связанный с диссипативным движением бурильной колонны, меньше выбранной пороговой величины для определенной литологии. 8. Носитель по п.7, отличающийся тем, что параметр реакции на бурение, оптимизированный в процессе бурения, тождественен параметру реакции на бурение, имеющему характеристики, определенные в соответствии с литологией. 9. Носитель по п.8, отличающийся тем, что определение характеристик включает измерение по меньшей мере одного свойства, относящегося по меньшей мере к одному составу или механическим свойствам земных пород, и определение отношения между рабочим параметром бурения и параметром реакции на бурение в породах, имеющих сходную литологию. 10. Носитель по п.9, отличающийся тем, что по меньшей мере одно свойство является либо электрическим удельным сопротивлением, либо временем прохождения акустического интервала, либо естественным гамма-излучением, либо пористостью по данным нейтронного каротажа, либо насыпной плотностью. 11. Носитель по п.8, отличающийся тем, что рабочий параметр бурения является либо нагрузкой на долото, либо скоростью вращения, либо расходом бурильного раствора. 12. Носитель по п.8, отличающийся тем, что по меньшей мере один параметр реакции на бурение является либо скоростью проходки, либо ускорением бурильной колонны.
МПК / Метки
МПК: E21B 45/00
Метки: глубины, бурения, измерений, способ, улучшения
Код ссылки
<a href="https://eas.patents.su/19-7499-sposob-uluchsheniya-izmerenijj-glubiny-bureniya.html" rel="bookmark" title="База патентов Евразийского Союза">Способ улучшения измерений глубины бурения</a>
Способ улучшения свойств жидкости для бурения скважин, способ улучшения смазывающих свойств буровой жидкости для бурения скважин, способ снижения вращающего момента и гидродинамического сопротивленияпри вращении, поднятии или опускании бурильной трубы, способ контролирования потерь буровой жидкости из нефтяной нисходящей буровой скважины
Номер патента: 357
Опубликовано: 24.06.1999
Авторы: Залески Питер Л., Деруин Дэвид Дж., Рассел Джордж У., Уейнтритт Дональд Дж.
МПК: C09K 7/02
Метки: сопротивленияпри, контролирования, бурения, буровой, нисходящей, скважины, свойств, смазывающих, гидродинамического, жидкости, бурильной, опускании, поднятии, снижения, способ, потерь, улучшения, вращении, момента, скважин, нефтяной, вращающего, трубы
Формула / Реферат:
1. Способ улучшения свойств жидкости для бурения скважин, отличающийся тем, что он включает стадию добавления в буровую жидкость упругих частиц углерода в виде графита. 2. Способ по п.1, отличающийся тем, что названные упругие частицы имеют упругое восстановление после деформации сжатия под давлением 68948 кПа свыше около 35%. 3. Способ по п.2, отличающийся тем, что названные упругие частицы имеют упругое восстановление после деформации сжатия...
Способ образования пузырьков газа в маслообразных жидкостях, флюид для бурения или технического обслуживания скважины и способ бурения скважины
Номер патента: 4505
Опубликовано: 29.04.2004
Автор: Морган Джули Б.
МПК: C09K 7/06
Метки: пузырьков, газа, образования, флюид, жидкостях, маслообразных, технического, бурения, обслуживания, скважины, способ
Формула / Реферат:
1. Способ образования пузырьков газа в маслообразных жидкостях, отличающийся тем, что к маслообразной жидкости сначала добавляют силиконовое масло и затем обрабатывают полученную смесь в присутствии газа с приложением к ней усилий от механических устройств. 2. Способ по п.1, отличающийся тем, что маслообразную жидкость выбирают из группы, включающей в себя нефтяные масла или их фракции, a-олефины, олефины с внутренними ненасыщенными связями,...
Способ контроля траектории бурения
Номер патента: 6571
Опубликовано: 24.02.2006
Авторы: Шаббир Ахмед, Армстронг Филип, Камата Масахиро
МПК: G01V 1/42, E21B 47/022, E21B 7/04...
Метки: способ, контроля, траектории, бурения
Формула / Реферат:
1. Способ контроля траектории ствола скважины, включающий следующие этапы: бурение ствола скважины по первой траектории; сбор сейсмических данных, получаемых при работе бурового долота, содержащих сейсмические данные, получаемые при работе бурового долота и относящиеся к траектории прямой волны; определение на основании собранных сейсмических данных, полученных при работе бурового долота и относящихся к траектории прямой волны, того, является ли...
Раствор для бурения или эксплуатации скважины, способ бурения или эксплуатации скважины в подземной формации
Номер патента: 3014
Опубликовано: 26.12.2002
Автор: Бруки Томми Ф.
МПК: C09K 7/02
Метки: раствор, способ, бурения, эксплуатации, подземной, формации, скважины
Формула / Реферат:
1. Раствор для бурения или эксплуатации скважины, отличающийся тем, что он содержит водную жидкость, включающую в себя, по меньшей мере, один загуститель, афронобразующее ПАВ и афроны, причем раствор имеет вязкость при низкой скорости сдвига, измеренную на вискозиметре Брукфильда при 0,5 об./мин и составляющую, по меньшей мере, 20000 мПаЧс. 2. Раствор по п.1, отличающийся тем, что концентрация афронов в растворе составляет менее 20 об.% от...
Способ обновления модели земной коры с использованием измерений, собираемых во время построения ствола скважины
Номер патента: 4218
Опубликовано: 26.02.2004
Авторы: Гхолкар Видхиадхар, Фуллер Джон, Олдред Уолтер Дэвид, Брадфорд Ян, Кук Джон Мервин
МПК: G01V 11/00
Метки: обновления, построения, собираемых, модели, земной, время, способ, измерений, коры, ствола, скважины, использованием
Формула / Реферат:
1. Способ обновления модели земной коры, содержащий этапы, при которых осуществляют получение модели земной коры, используемой для прогнозирования потенциальных проблем бурения ствола скважины, имеющего предопределенную траекторию, причем модель земной коры содержит множество составляющих; получение оценок состояния ствола скважины и локальных геологических элементов, причем оценки основаны на модели земной коры и включают оценку состояния...