Управляющее устройство предпочтительно для машин для контроля и проверки контейнеров и/или их содержимого и соответствующая машина
Формула / Реферат
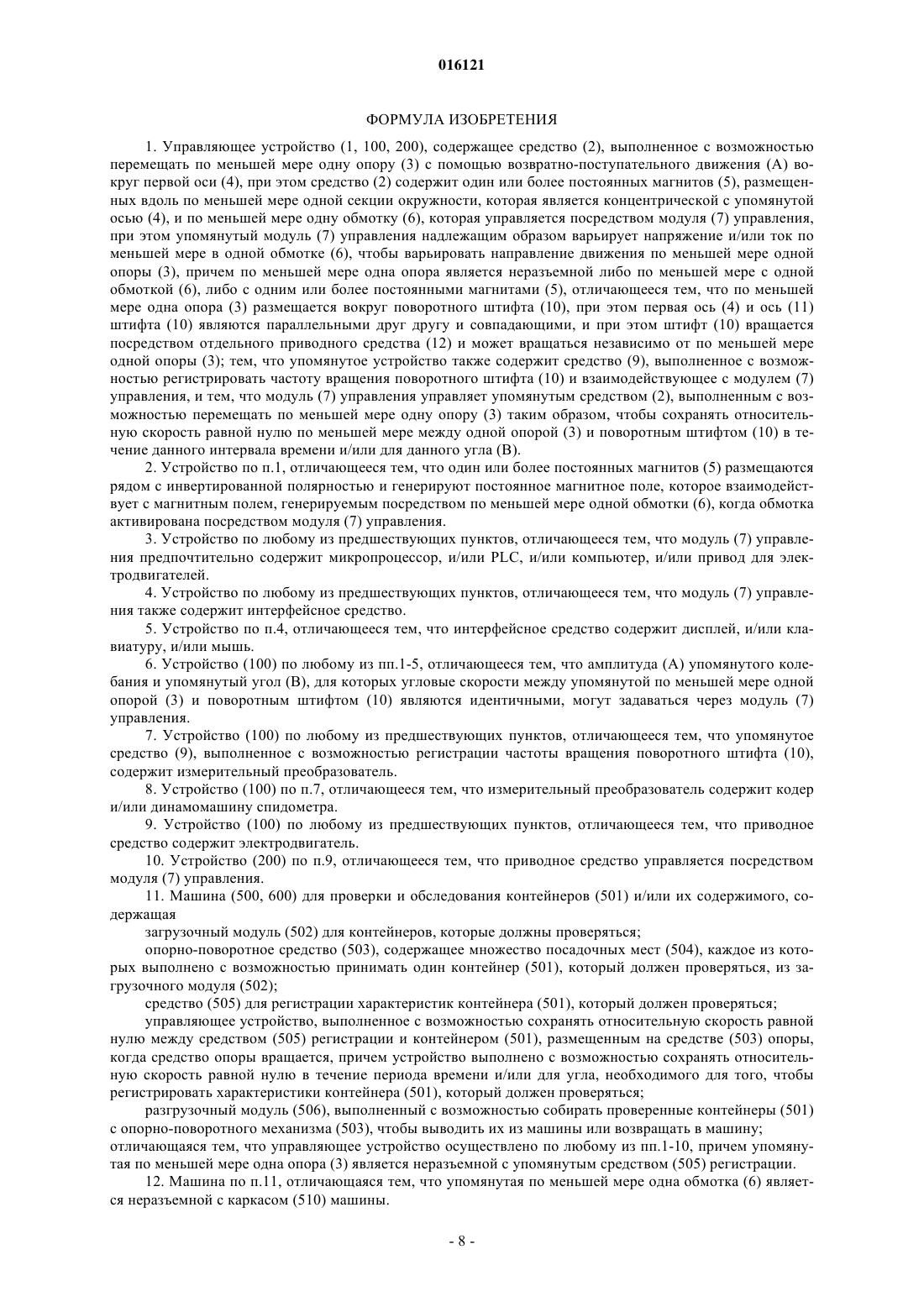
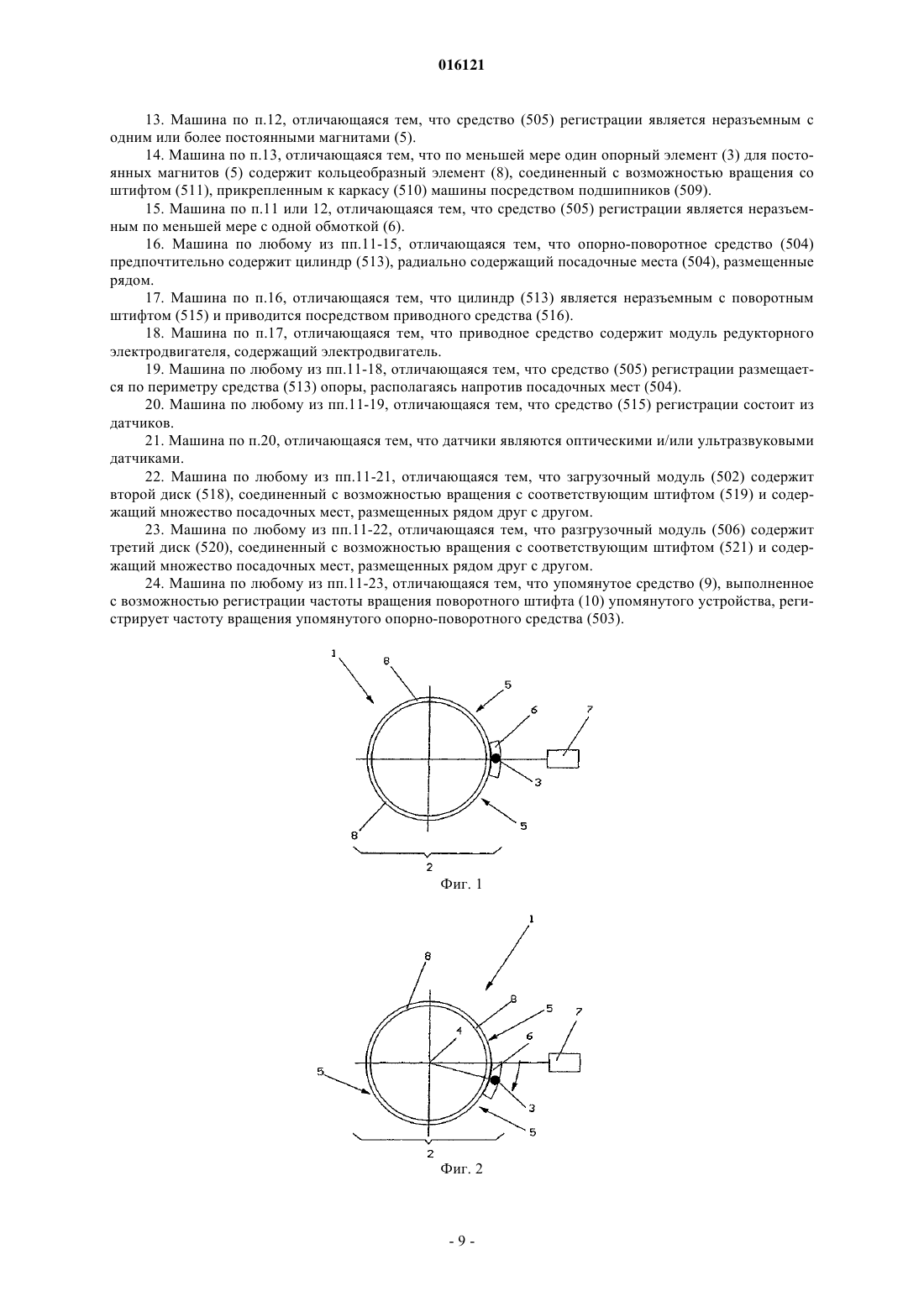
1. Управляющее устройство (1, 100, 200), содержащее средство (2), выполненное с возможностью перемещать по меньшей мере одну опору (3) с помощью возвратно-поступательного движения (A) вокруг первой оси (4), при этом средство (2) содержит один или более постоянных магнитов (5), размещенных вдоль по меньшей мере одной секции окружности, которая является концентрической с упомянутой осью (4), и по меньшей мере одну обмотку (6), которая управляется посредством модуля (7) управления, при этом упомянутый модуль (7) управления надлежащим образом варьирует напряжение и/или ток по меньшей мере в одной обмотке (6), чтобы варьировать направление движения по меньшей мере одной опоры (3), причем по меньшей мере одна опора является неразъемной либо по меньшей мере с одной обмоткой (6), либо с одним или более постоянными магнитами (5), отличающееся тем, что по меньшей мере одна опора (3) размещается вокруг поворотного штифта (10), при этом первая ось (4) и ось (11) штифта (10) являются параллельными друг другу и совпадающими, и при этом штифт (10) вращается посредством отдельного приводного средства (12) и может вращаться независимо от по меньшей мере одной опоры (3); тем, что упомянутое устройство также содержит средство (9), выполненное с возможностью регистрировать частоту вращения поворотного штифта (10) и взаимодействующее с модулем (7) управления, и тем, что модуль (7) управления управляет упомянутым средством (2), выполненным с возможностью перемещать по меньшей мере одну опору (3) таким образом, чтобы сохранять относительную скорость равной нулю по меньшей мере между одной опорой (3) и поворотным штифтом (10) в течение данного интервала времени и/или для данного угла (B).
2. Устройство по п.1, отличающееся тем, что один или более постоянных магнитов (5) размещаются рядом с инвертированной полярностью и генерируют постоянное магнитное поле, которое взаимодействует с магнитным полем, генерируемым посредством по меньшей мере одной обмотки (6), когда обмотка активирована посредством модуля (7) управления.
3. Устройство по любому из предшествующих пунктов, отличающееся тем, что модуль (7) управления предпочтительно содержит микропроцессор, и/или PLC, и/или компьютер, и/или привод для электродвигателей.
4. Устройство по любому из предшествующих пунктов, отличающееся тем, что модуль (7) управления также содержит интерфейсное средство.
5. Устройство по п.4, отличающееся тем, что интерфейсное средство содержит дисплей, и/или клавиатуру, и/или мышь.
6. Устройство (100) по любому из пп.1-5, отличающееся тем, что амплитуда (A) упомянутого колебания и упомянутый угол (B), для которых угловые скорости между упомянутой по меньшей мере одной опорой (3) и поворотным штифтом (10) являются идентичными, могут задаваться через модуль (7) управления.
7. Устройство (100) по любому из предшествующих пунктов, отличающееся тем, что упомянутое средство (9), выполненное с возможностью регистрации частоты вращения поворотного штифта (10), содержит измерительный преобразователь.
8. Устройство (100) по п.7, отличающееся тем, что измерительный преобразователь содержит кодер и/или динамомашину спидометра.
9. Устройство (100) по любому из предшествующих пунктов, отличающееся тем, что приводное средство содержит электродвигатель.
10. Устройство (200) по п.9, отличающееся тем, что приводное средство управляется посредством модуля (7) управления.
11. Машина (500, 600) для проверки и обследования контейнеров (501) и/или их содержимого, содержащая
загрузочный модуль (502) для контейнеров, которые должны проверяться;
опорно-поворотное средство (503), содержащее множество посадочных мест (504), каждое из которых выполнено с возможностью принимать один контейнер (501), который должен проверяться, из загрузочного модуля (502);
средство (505) для регистрации характеристик контейнера (501), который должен проверяться;
управляющее устройство, выполненное с возможностью сохранять относительную скорость равной нулю между средством (505) регистрации и контейнером (501), размещенным на средстве (503) опоры, когда средство опоры вращается, причем устройство выполнено с возможностью сохранять относительную скорость равной нулю в течение периода времени и/или для угла, необходимого для того, чтобы регистрировать характеристики контейнера (501), который должен проверяться;
разгрузочный модуль (506), выполненный с возможностью собирать проверенные контейнеры (501) с опорно-поворотного механизма (503), чтобы выводить их из машины или возвращать в машину;
отличающаяся тем, что управляющее устройство осуществлено по любому из пп.1-10, причем упомянутая по меньшей мере одна опора (3) является неразъемной с упомянутым средством (505) регистрации.
12. Машина по п.11, отличающаяся тем, что упомянутая по меньшей мере одна обмотка (6) является неразъемной с каркасом (510) машины.
13. Машина по п.12, отличающаяся тем, что средство (505) регистрации является неразъемным с одним или более постоянными магнитами (5).
14. Машина по п.13, отличающаяся тем, что по меньшей мере один опорный элемент (3) для постоянных магнитов (5) содержит кольцеобразный элемент (8), соединенный с возможностью вращения со штифтом (511), прикрепленным к каркасу (510) машины посредством подшипников (509).
15. Машина по п.11 или 12, отличающаяся тем, что средство (505) регистрации является неразъемным по меньшей мере с одной обмоткой (6).
16. Машина по любому из пп.11-15, отличающаяся тем, что опорно-поворотное средство (504) предпочтительно содержит цилиндр (513), радиально содержащий посадочные места (504), размещенные рядом.
17. Машина по п.16, отличающаяся тем, что цилиндр (513) является неразъемным с поворотным штифтом (515) и приводится посредством приводного средства (516).
18. Машина по п.17, отличающаяся тем, что приводное средство содержит модуль редукторного электродвигателя, содержащий электродвигатель.
19. Машина по любому из пп.11-18, отличающаяся тем, что средство (505) регистрации размещается по периметру средства (513) опоры, располагаясь напротив посадочных мест (504).
20. Машина по любому из пп.11-19, отличающаяся тем, что средство (515) регистрации состоит из датчиков.
21. Машина по п.20, отличающаяся тем, что датчики являются оптическими и/или ультразвуковыми датчиками.
22. Машина по любому из пп.11-21, отличающаяся тем, что загрузочный модуль (502) содержит второй диск (518), соединенный с возможностью вращения с соответствующим штифтом (519) и содержащий множество посадочных мест, размещенных рядом друг с другом.
23. Машина по любому из пп.11-22, отличающаяся тем, что разгрузочный модуль (506) содержит третий диск (520), соединенный с возможностью вращения с соответствующим штифтом (521) и содержащий множество посадочных мест, размещенных рядом друг с другом.
24. Машина по любому из пп.11-23, отличающаяся тем, что упомянутое средство (9), выполненное с возможностью регистрации частоты вращения поворотного штифта (10) упомянутого устройства, регистрирует частоту вращения упомянутого опорно-поворотного средства (503).

Текст
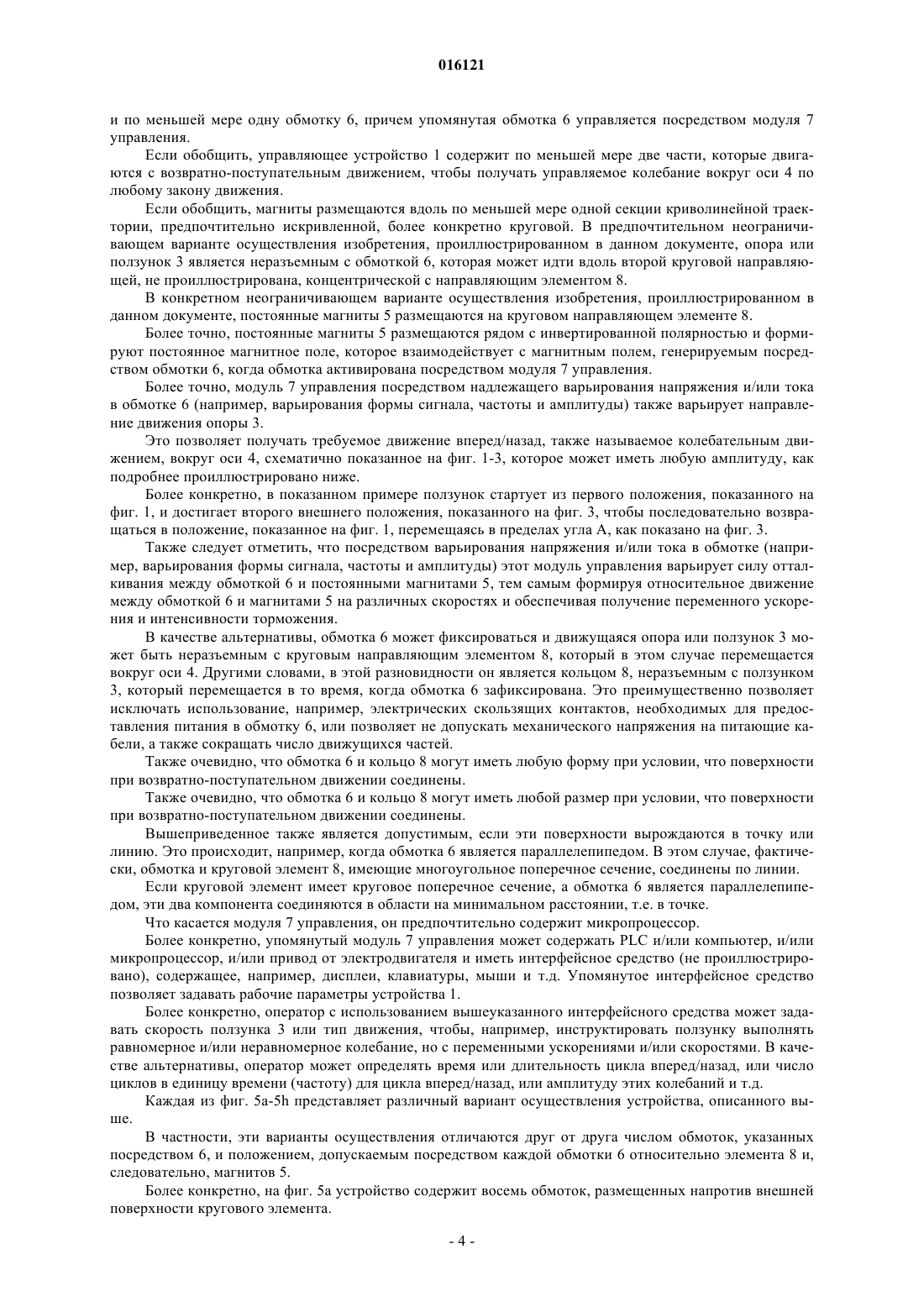
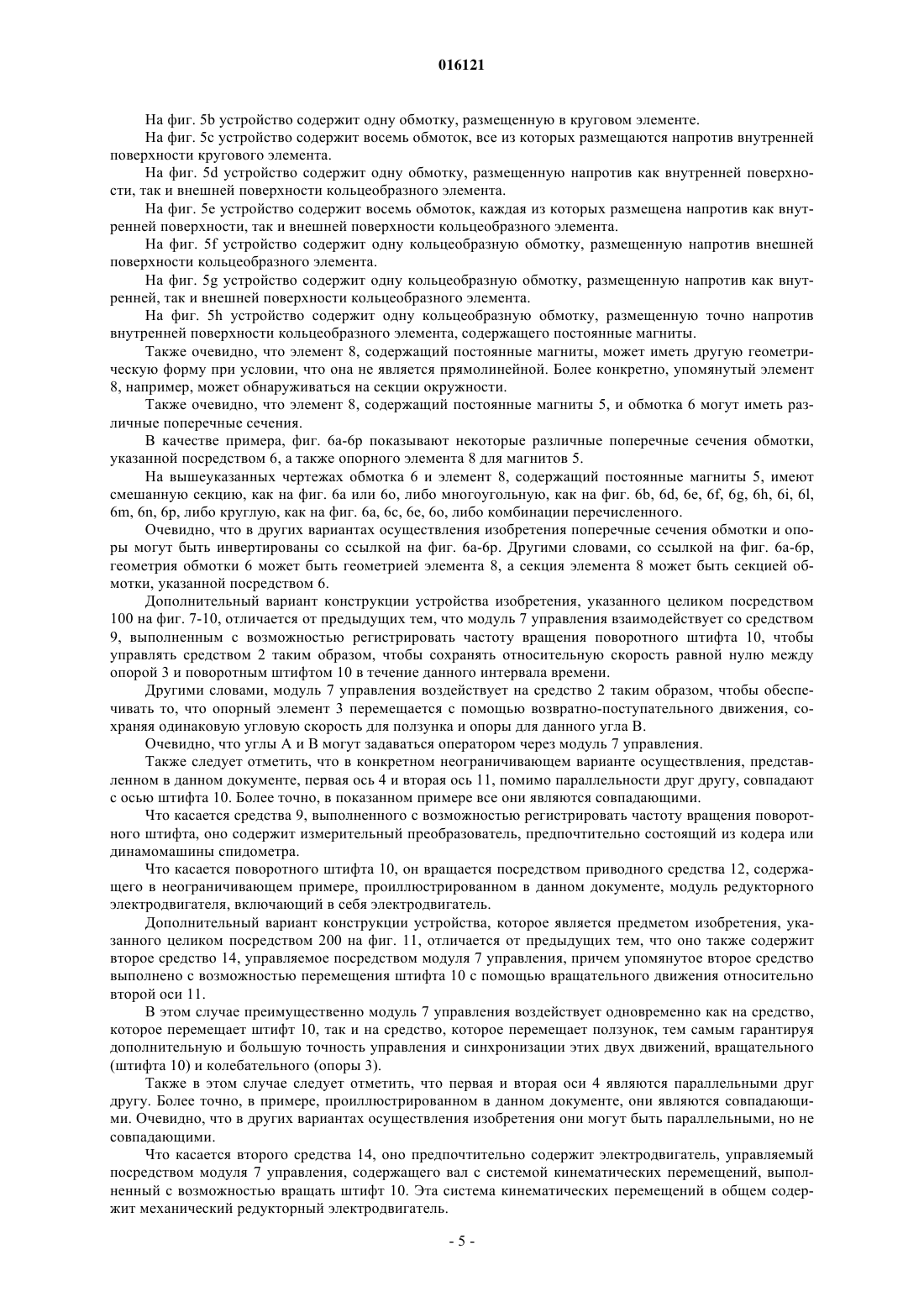
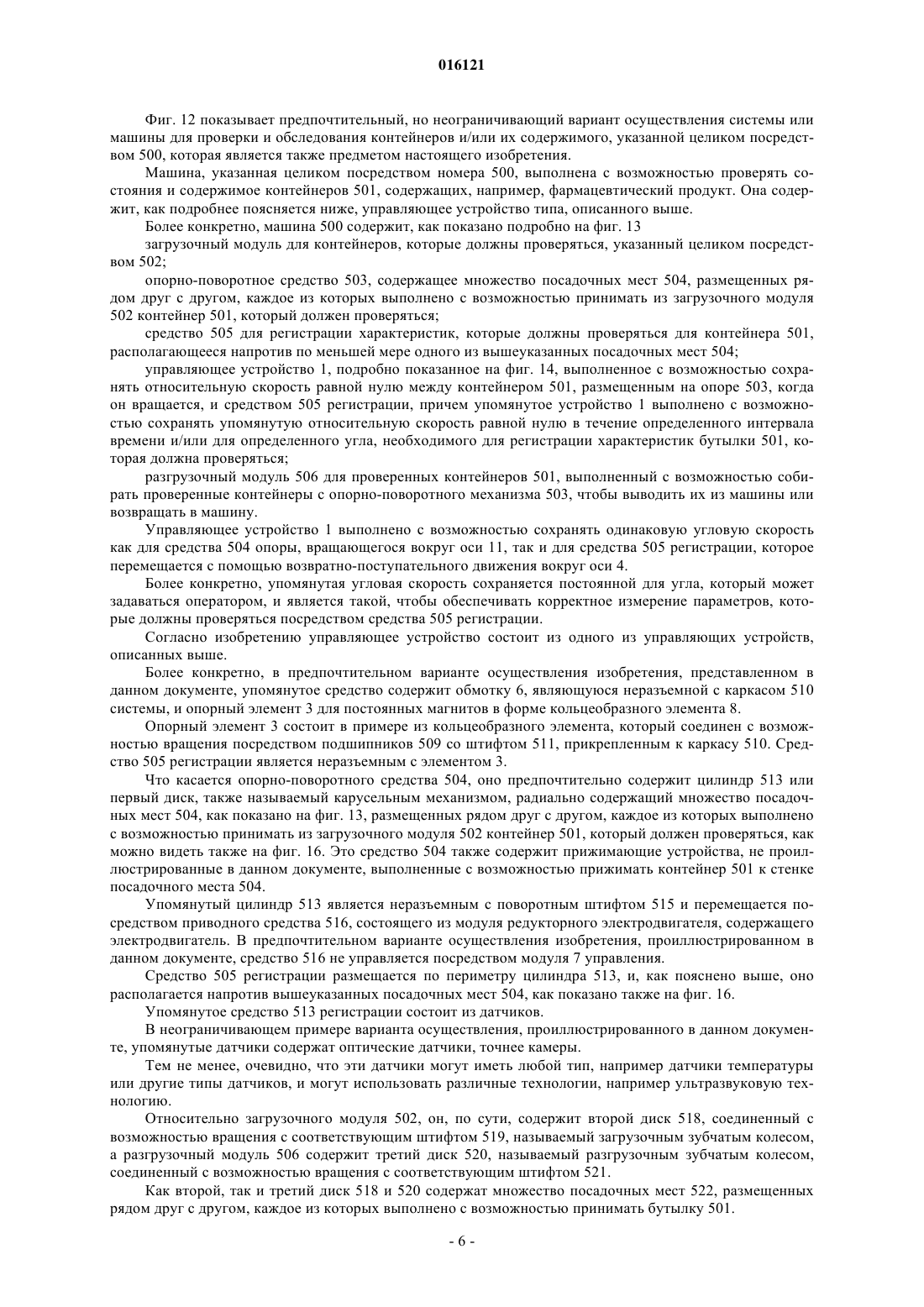
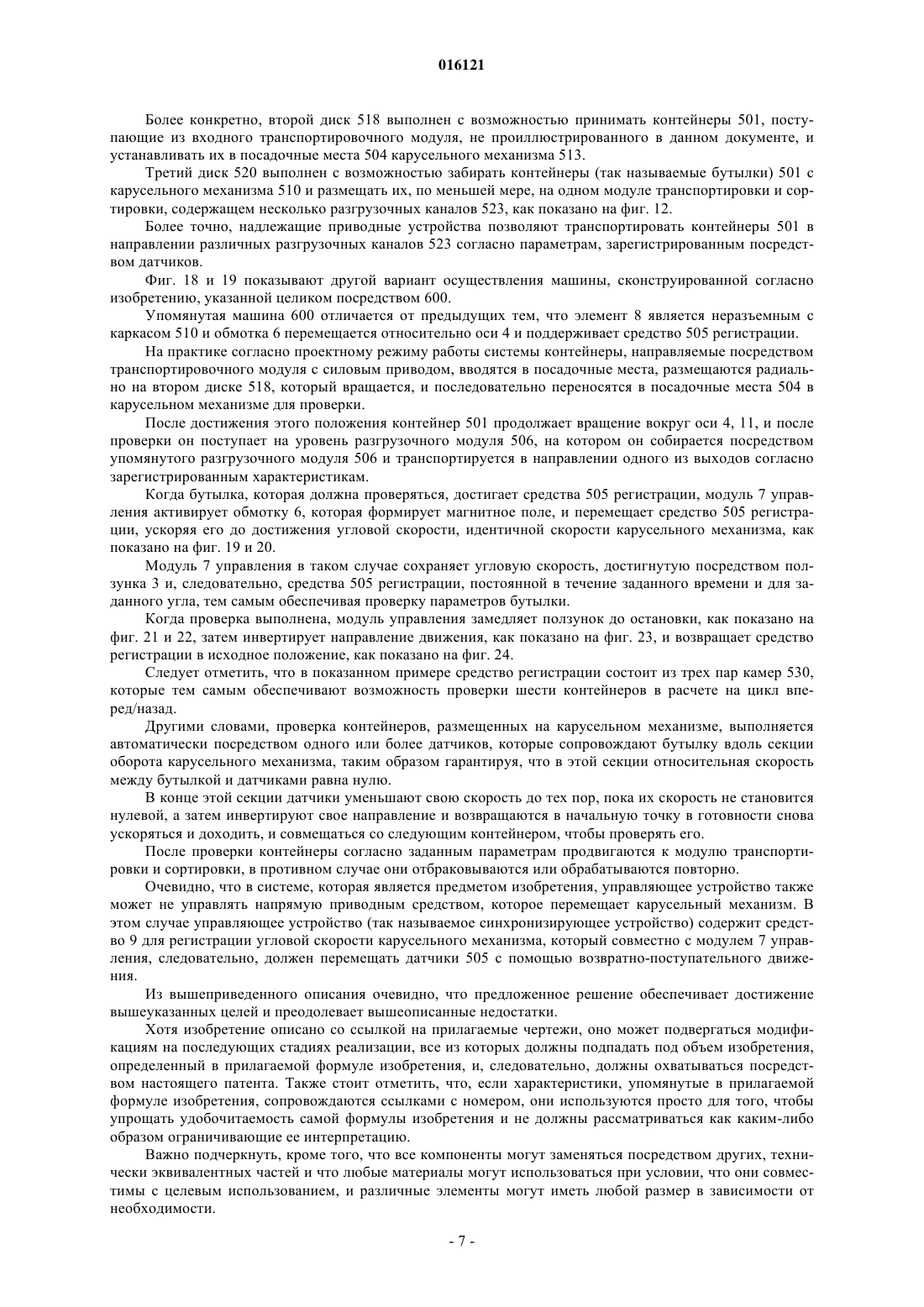
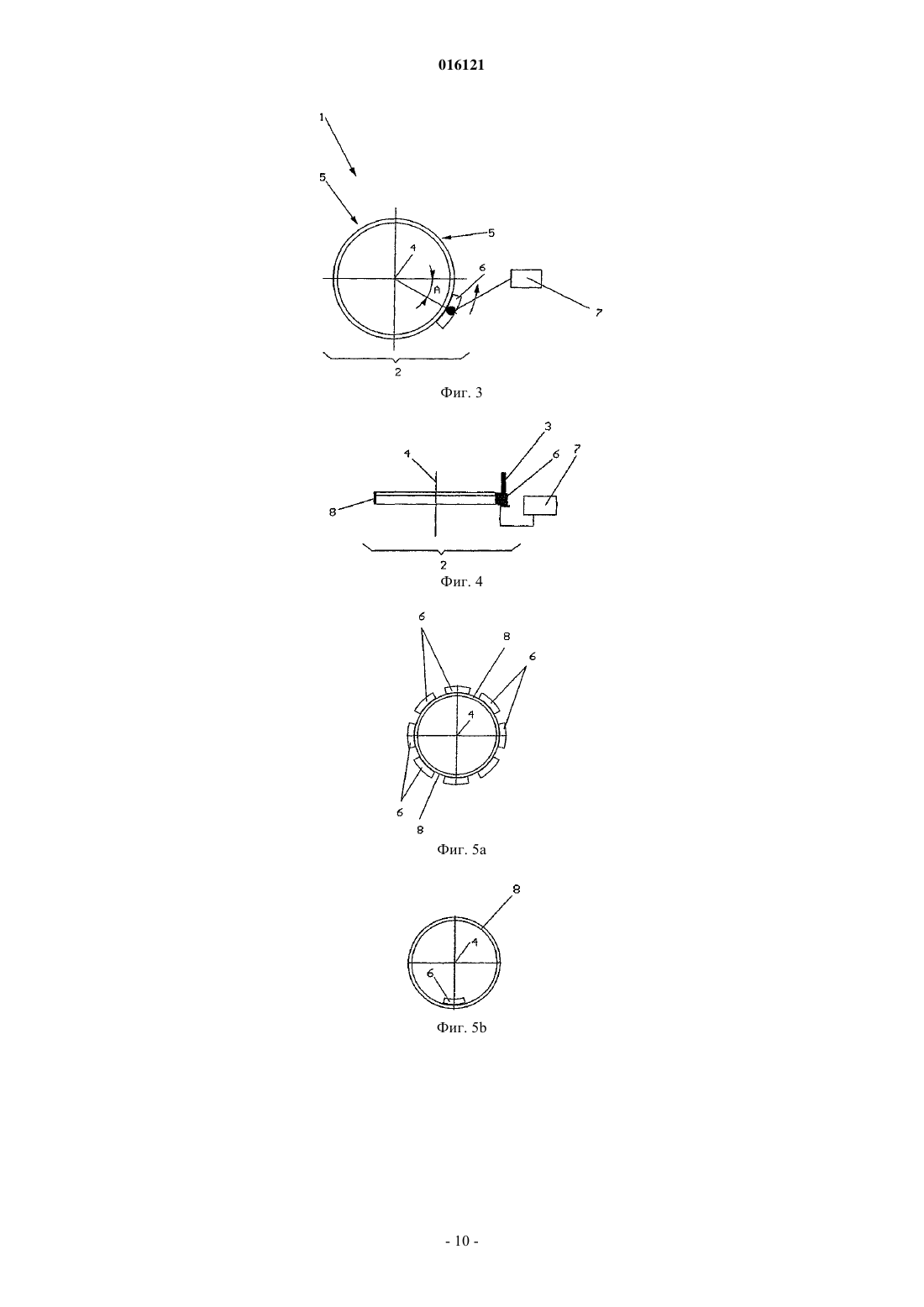
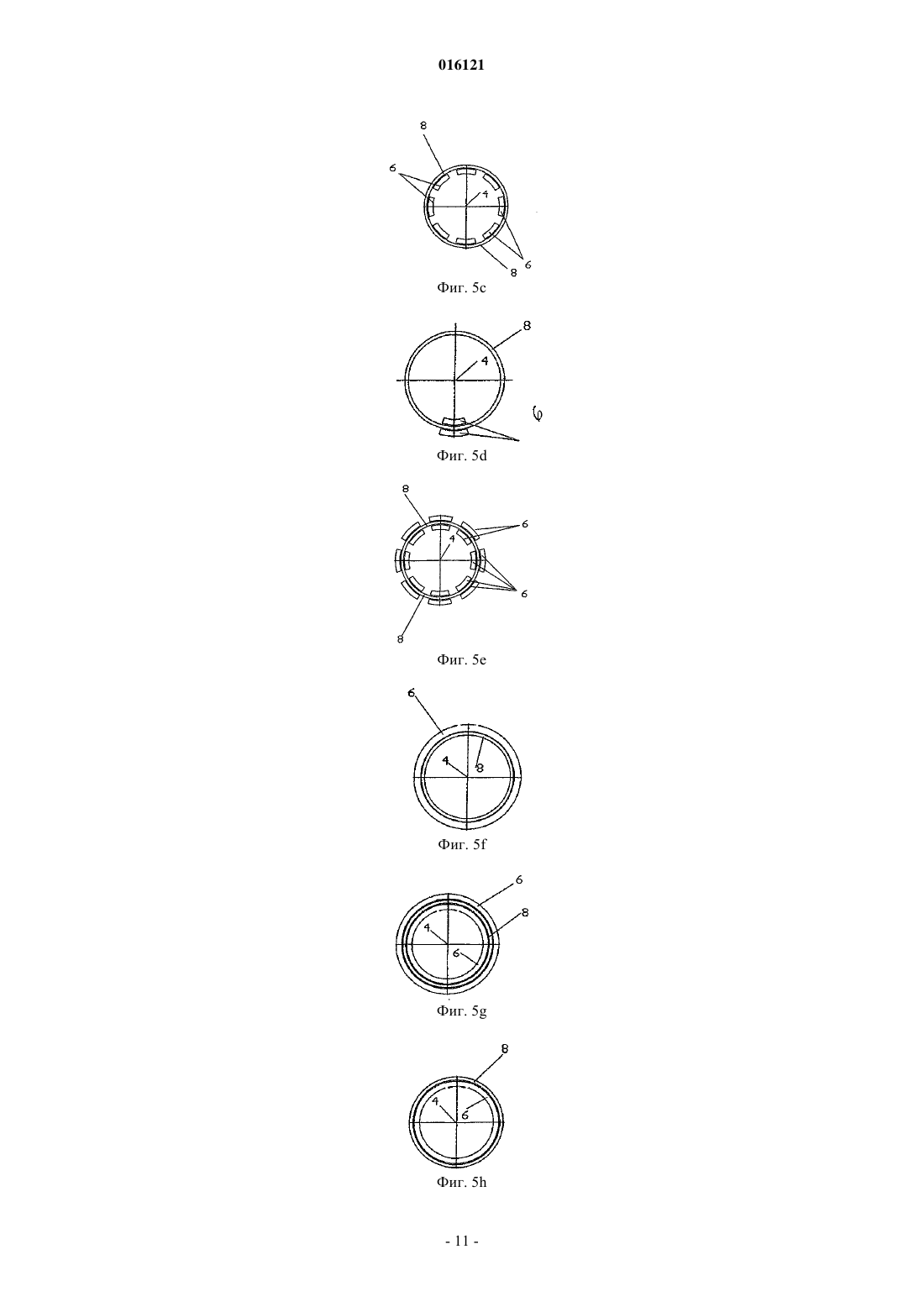
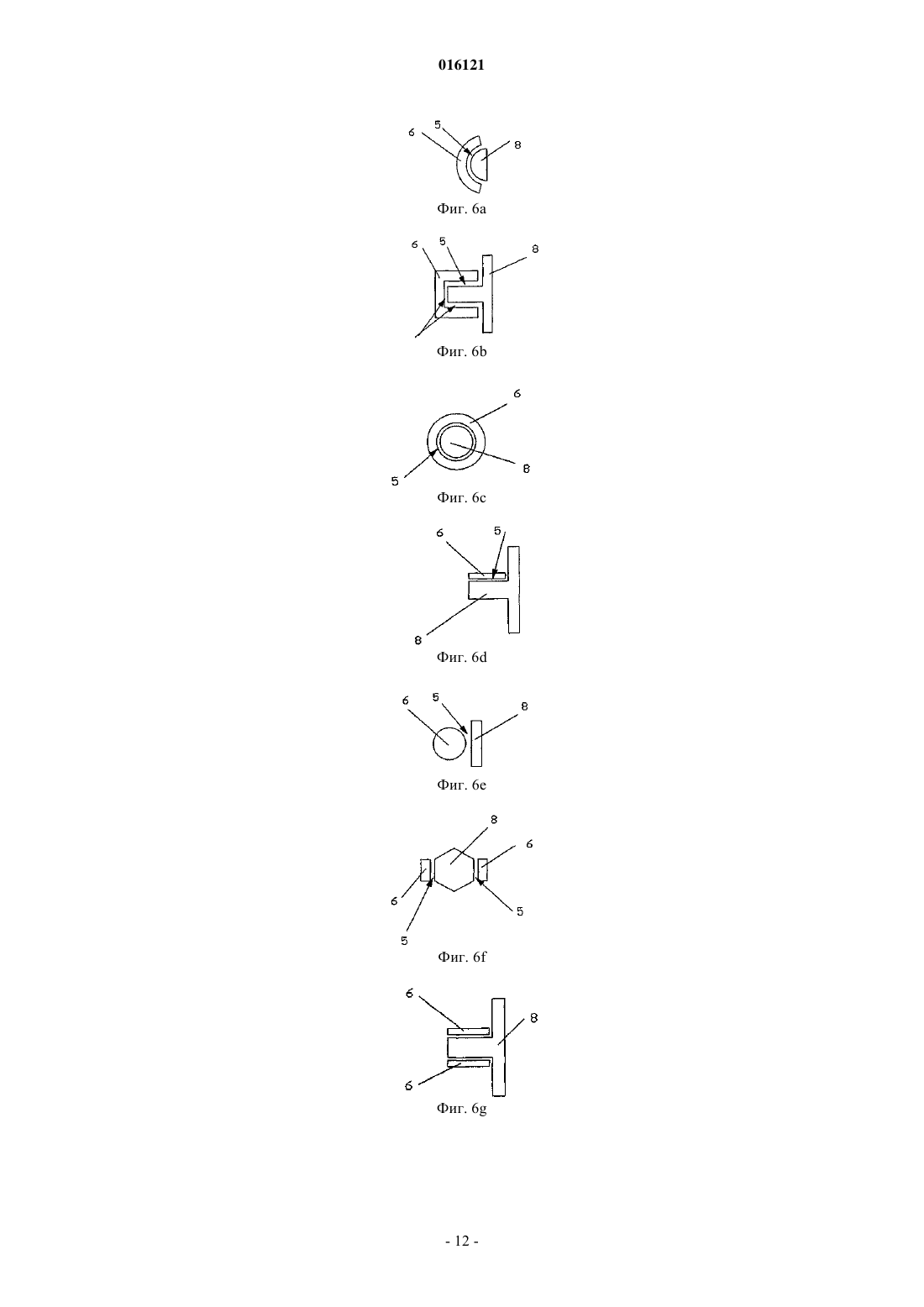
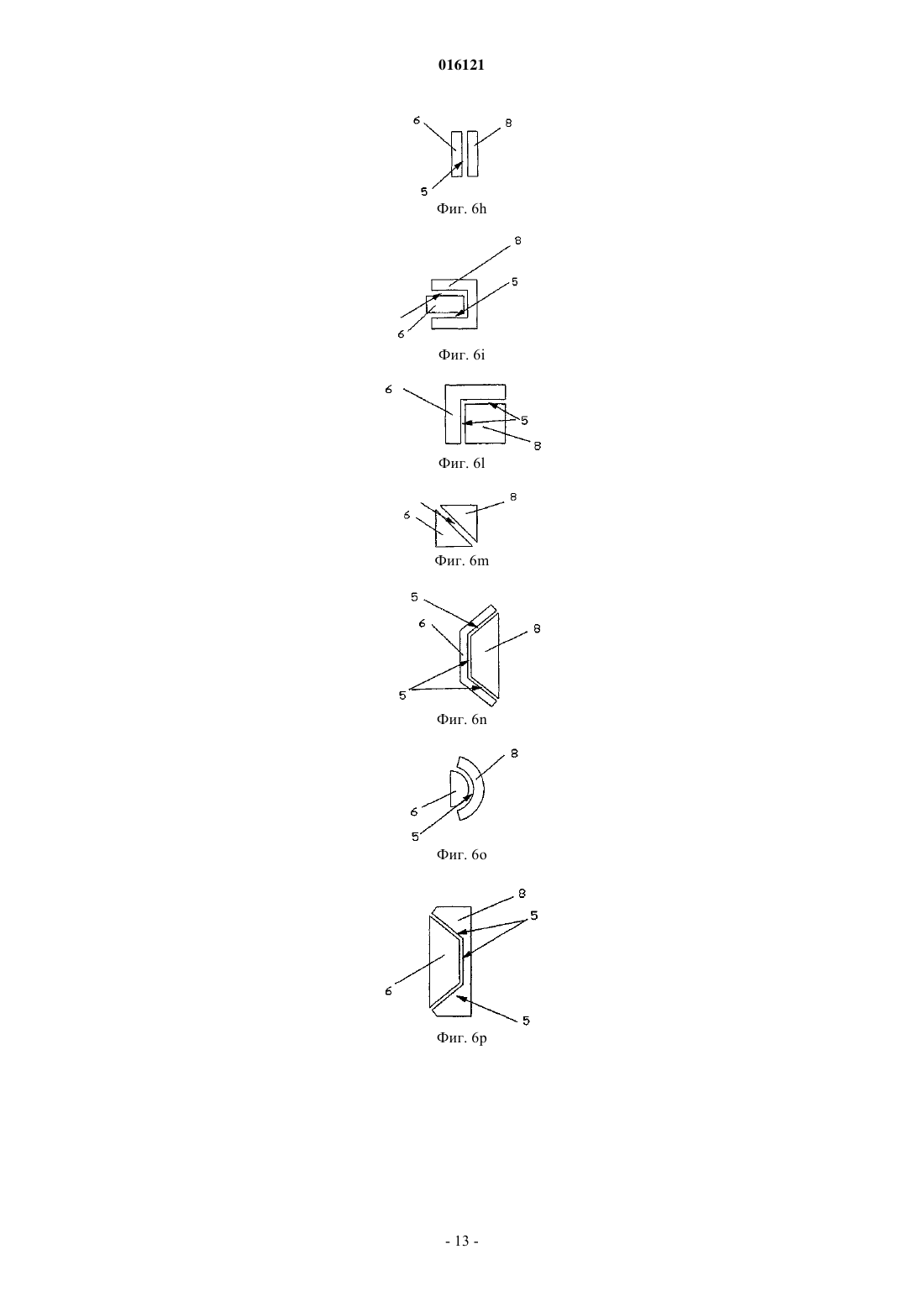
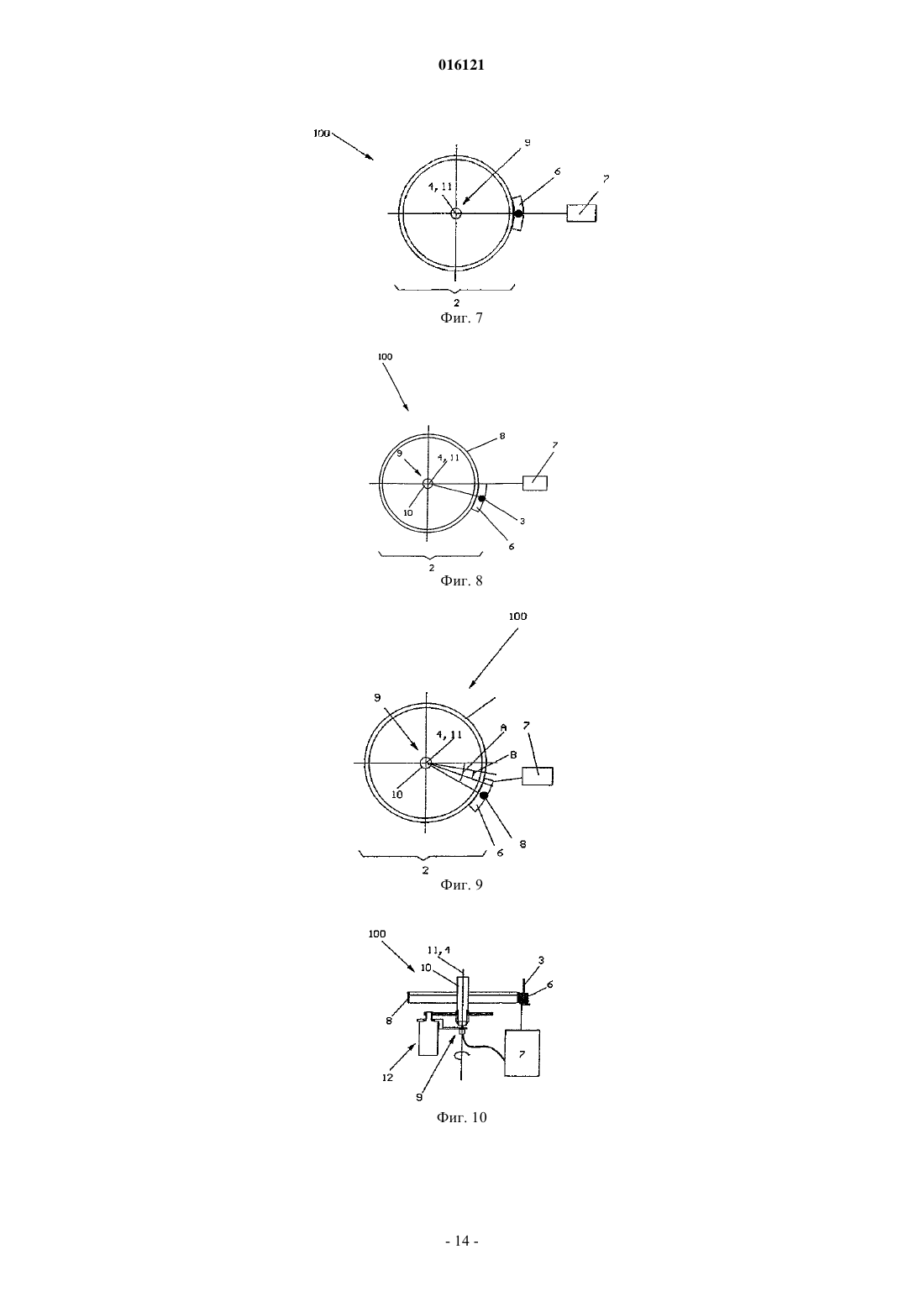
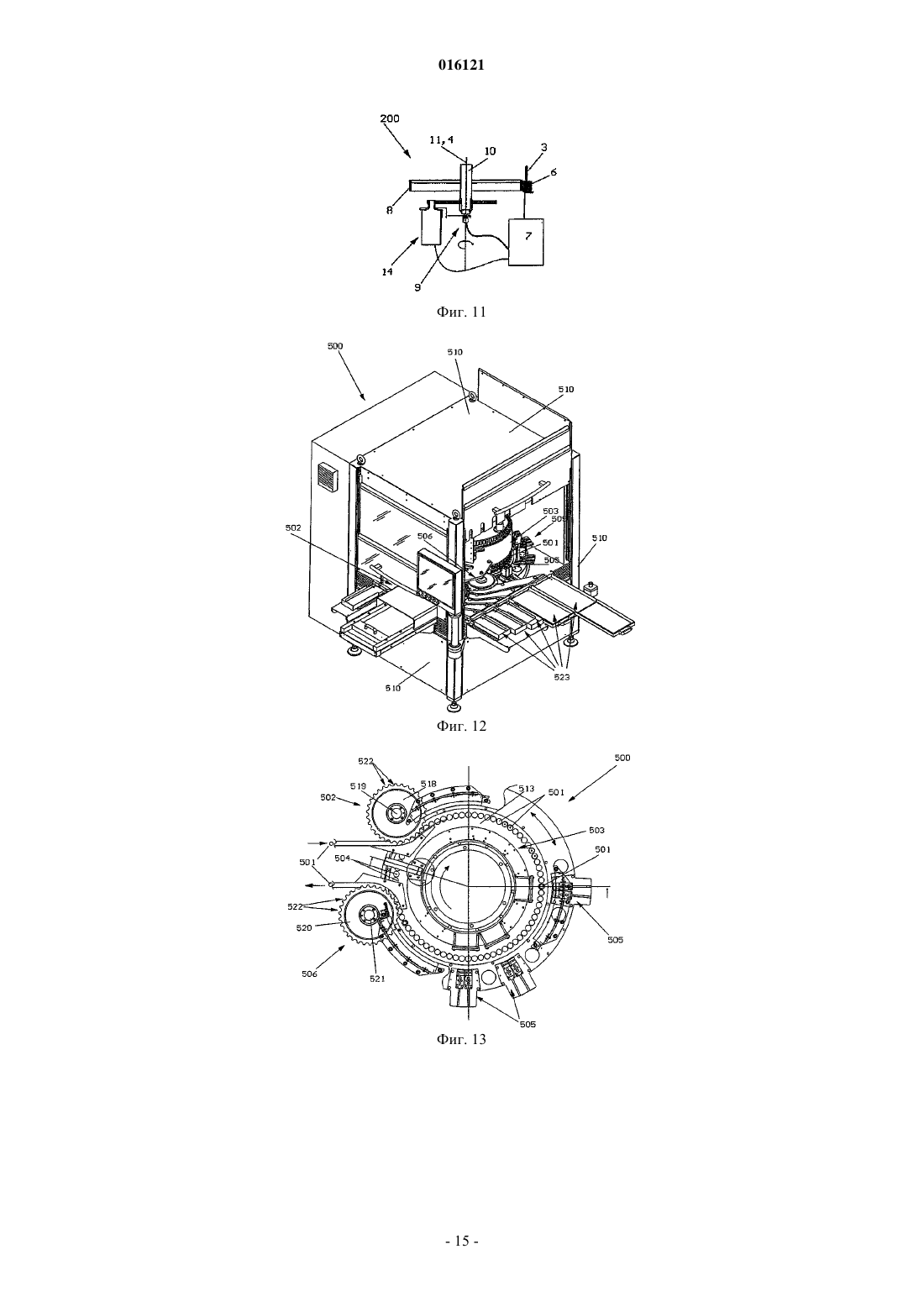
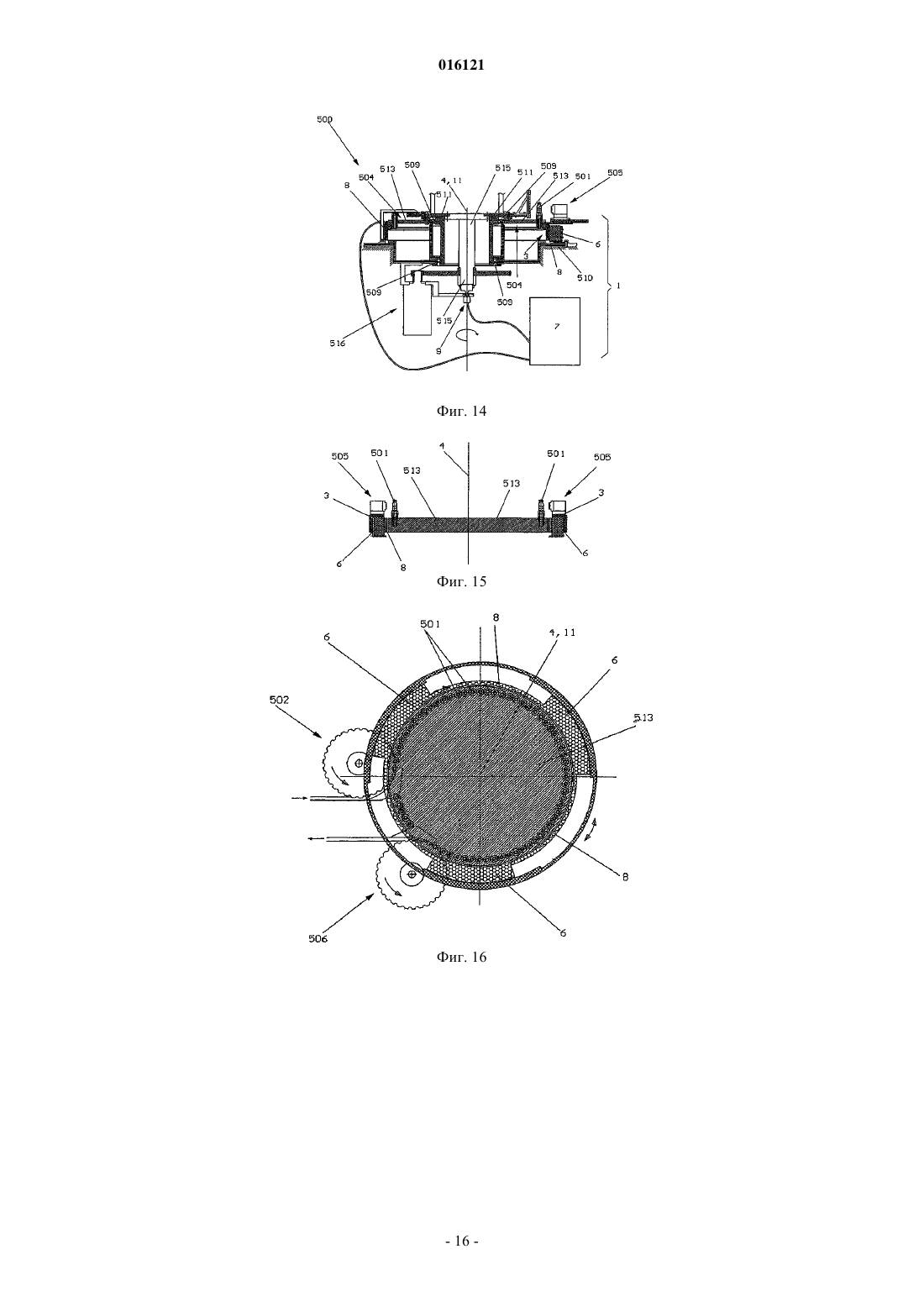
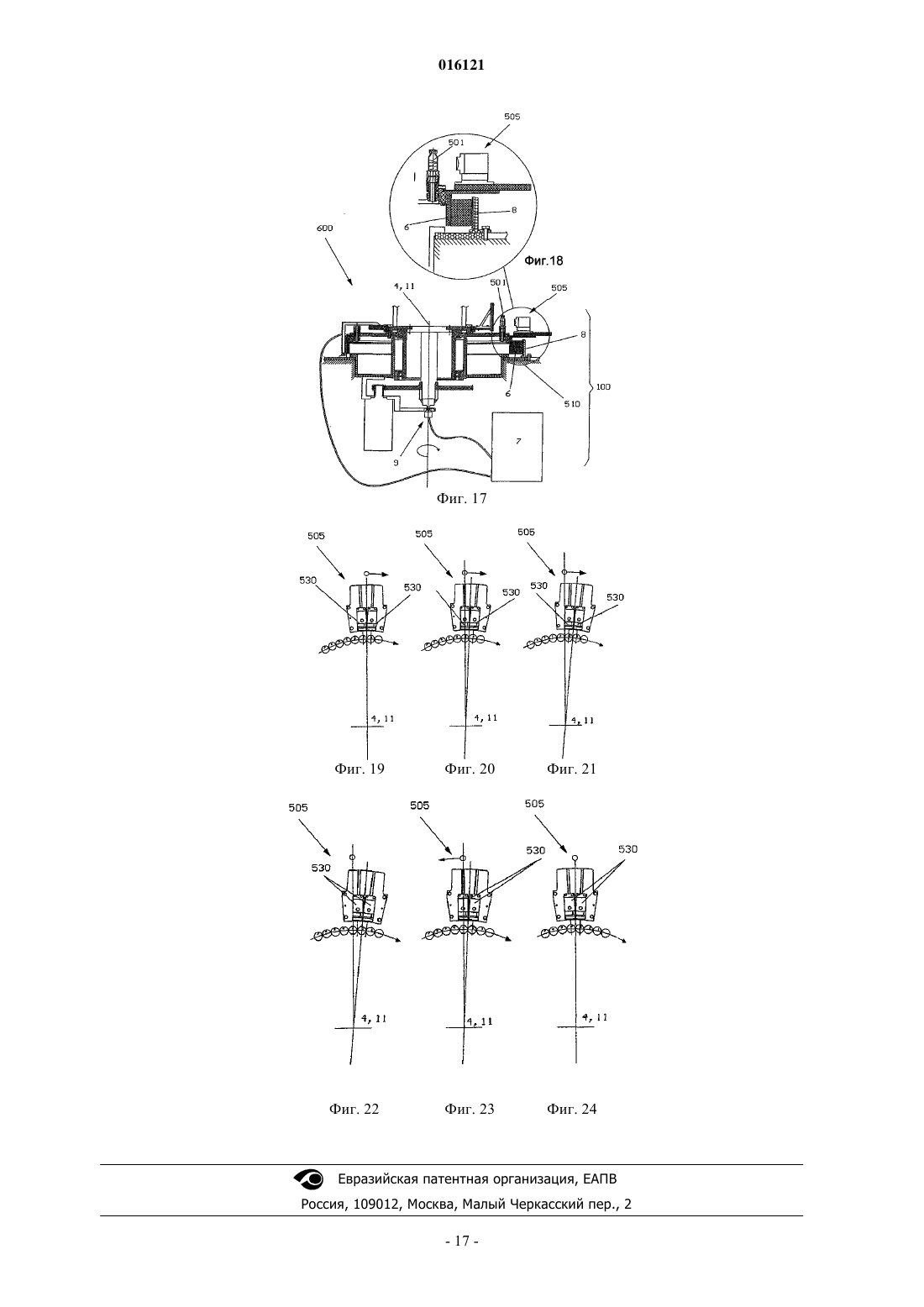
УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ПРЕДПОЧТИТЕЛЬНО ДЛЯ МАШИН ДЛЯ КОНТРОЛЯ И ПРОВЕРКИ КОНТЕЙНЕРОВ И/ИЛИ ИХ СОДЕРЖИМОГО И СООТВЕТСТВУЮЩАЯ МАШИНА В изобретении предложено управляющее устройство (1, 100, 200), содержащее средство (2),выполненное с возможностью перемещать опору (3) с помощью возвратно-поступательного движения (A) вокруг оси (4). Средство (2) содержит один или более постоянных магнитов (5),размещенных вдоль секции окружности, которая является концентрической с осью (4), и обмотку(6), управляемую посредством модуля (7) управления. Изобретение также относится к машине для проверки и обследования контейнеров. 016121 Изобретение относится к управляющему устройству, которое должно использоваться предпочтительно в машинах для контроля и проверки контейнеров, и к соответствующей контрольносортировочной машине. Более конкретно, изобретение относится к синхронизирующему устройству, которое должно использоваться в машинах для контроля и проверки контейнеров и/или их содержимого, предпочтительно в фармацевтическом секторе, и к соответствующей машине. Как уже известно, некоторые продукты упаковываются и запечатываются в контейнеры. В частности, в фармацевтическом секторе некоторые продукты помещаются в контейнеры и запечатываются в них, причем упомянутыми контейнерами являются, например, бутылки или флаконы, изготовленные из стекла или синтетического материала, такого как, к примеру, пластмасса или аналогичный материал. Упомянутые контейнеры после запечатывания и выхода из системы заполнения и запечатывания подвергаются различным обследованиям и проверкам. Эти проверки позволяют идентифицировать, например, любые инородные частицы в контейнерах и/или их содержимом, и/или дефекты в герметизации контейнеров и/или в крышке, трещины, повреждения, и/или регистрировать физико-химические характеристики материала, содержащегося в контейнерах. Эти проверки и обследования относятся, если обобщить, к состоянию контейнера и/или продукта,содержащегося в нем. Также очевидно, что контейнер может проверяться даже до его заполнения. Упомянутые проверки выполняются с помощью специальных машин, которые обеспечивают выполнение этой операции в то время, когда контейнер проходит по технологической линии. Более конкретно, машины или системы известного типа в общем содержат загрузочный модуль для контейнеров, которые должны проверяться; опорно-поворотное средство, состоящее из цилиндра, также называемого карусельным механизмом, радиально содержащего множество посадочных мест, размещенных рядом друг с другом, каждое из которых выполнено с возможностью принимать один контейнер, который должен проверяться, из загрузочного модуля; средство для регистрации характеристик контейнера, который должен проверяться, размещенное по периметру цилиндра и располагающееся напротив упомянутых посадочных мест; управляющее или синхронизирующее устройство, выполненное с возможностью сохранять относительную угловую скорость равной нулю между бутылкой, размещенной на опорно-поворотном механизме, и средством регистрации, причем упомянутое устройство выполнено с возможностью сохранять упомянутую относительную скорость равной нулю в течение периода времени, необходимого для регистрации характеристик, которые должны проверяться; разгрузочный модуль для проверенных контейнеров, выполненный с возможностью собирать проверенные контейнеры с опорно-поворотного механизма, чтобы выводить их из системы или возвращать в систему. Важно отметить, что для того чтобы правильно выполнять вышеуказанные операции регистрации,необходимо удерживать бутылку неподвижной относительно средства регистрации в течение времени,требуемого для того, чтобы регистрировать параметр, который должен проверяться. Известные синхронизирующие устройства, также называемые механическими осцилляторами, являются механическими и выполнены с возможностью преобразовывать входящее непрерывное вращательное движение в меньшее непрерывное вращательное движение на валу на выходе и в возвратно-поступательное движение опоры. Более точно, упомянутые устройства содержат вращательный вал, приводимый посредством электродвигателя, который через механическую систему шестерен и кулачков вращает штифт, к которому прикреплен цилиндр, и одновременно перемещает с помощью возвратно-поступательного движения движущуюся опору, к которой крепится средство регистрации. Более конкретно, вышеуказанная механическая система с сопряженными кулачками и роликовым контактным датчиком обеспечивает то, что движущаяся опора проходит по дуге окружности и сохраняет в течение данного интервала времени относительную скорость равной нулю относительно поворотного штифта. Другими словами, механическая система обеспечивает то, что для данной амплитуды дуги окружности траектории цилиндра угловые скорости ползунка и движущейся опоры являются одинаковыми. Законы движения и амплитуда колебаний движущейся опоры определяются посредством профиля кулачков. Первый недостаток, вызываемый посредством механических синхронизирующих устройств известного типа, используемых в системах для проверки фармацевтических продуктов, в частности, заключается в том, что эти устройства являются сложными, тяжелыми и громоздкими. Другой недостаток заключается в том, что присутствие кинематических движений в вышеупомянутых устройствах приводит к механическим люфтам и, следовательно, затрудняет постоянное точное управление перемещением датчиков. Дополнительный недостаток заключается в том, что механические части этих механических синхронизирующих устройств формируют трение и соответственно подвержены износу, который значительно уменьшает срок службы самих механических частей, а следовательно, и устройств, которые содержат их.-1 016121 Дополнительный недостаток обусловлен тем фактом, что механические синхронизирующие устройства нуждаются в смазке. Другой недостаток обусловлен тем фактом, что вышеуказанное трение формирует потери мощности, которые не являются пренебрежимо малыми. Другой недостаток заключается в том, что скорости и ускорения, которые могут быть достигнуты посредством датчиков, являются ограниченными. Другой недостаток заключается в том, что упругость компонентов механических синхронизирующих устройств вызывает явления механического резонанса и, следовательно, нежелательные колебания и вибрации датчиков даже на стадии регистрации. Дополнительный недостаток обусловлен тем фактом, что соотношение между фактическим временем для проверки контейнеров и временем, в течение которого цилиндрическая опора должна выполнять один оборот, является фиксированным и задается посредством передаточных чисел между механическими частями кинематической цепи синхронизирующего устройства, которое передает движение в датчики. Другой недостаток заключается в том, что компоненты механических синхронизирующих устройств должны конструироваться с высокой точностью и минимальными значениями допуска, чтобы обеспечивать оптимальный синхронизм между движением опоры и движением поворотного штифта. Дополнительный недостаток, связанный с предыдущим, обусловлен тем фактом, что механические синхронизирующие устройства являются дорогими. Цель настоящего изобретения заключается в том, чтобы преодолевать недостатки, описанные выше. В частности, первая цель изобретения заключается в том, чтобы конструировать управляющее устройство предпочтительно для машин для контроля и проверки контейнеров и/или их содержимого и соответствующую машину. Дополнительная цель изобретения заключается в том, чтобы конструировать синхронизирующее устройство, выполненное с возможностью использования, в частности, в системах или машинах для проверки и обследования контейнеров и/или продукта, содержащегося в них, в фармацевтической и пищевой промышленности, и соответствующую машину. Другая цель изобретения заключается в том, чтобы конструировать устройство и машину, которые дают возможность проверки контейнеров и/или их содержимого автоматически и постоянно, без прерывания. Дополнительная цель изобретения заключается в том, чтобы конструировать устройство, которое имеет очень компактную структуру и, следовательно, меньшие габаритные размеры по сравнению с сопоставимыми устройствами известного типа. Другая цель изобретения заключается в том, чтобы конструировать устройство и машину, которые позволяют исключать или, по меньшей мере, минимизировать использование элементов механической передачи для перемещения датчиков, которые проверяют контейнеры. Дополнительная цель изобретения заключается в том, чтобы конструировать устройство и машину,отличающуюся меньшим трением и, следовательно, меньшим износом и потерями мощности, при этом упомянутые устройство и машина должны требовать меньшего технического обслуживания, чем аналогичные устройства известного типа. Дополнительная цель изобретения заключается в том, чтобы конструировать устройство, которое позволяет всегда точно перемещать опору, выполненную с возможностью поддержки датчиков, которые проверяют контейнеры. Дополнительная цель изобретения заключается в том, чтобы конструировать устройство и машину,которые позволяют получать высокие скорости позиционирования опоры и, следовательно, высокие скорости датчиков. Дополнительная цель изобретения заключается в том, чтобы конструировать машину, которая, по сравнению с эквивалентными машинами известного типа, обеспечивает возможность проверки большего числа контейнеров в единицу времени. Дополнительная цель изобретения заключается в том, чтобы конструировать устройство и машину,которые являются эффективными и надежными. Еще одна, но не самая незначимая цель изобретения, заключается в том, чтобы конструировать устройство, которое является легким, простым с точки зрения конструкции и исполнения, экономичным и удобным в создании и сборке. Вышеописанные цели достигаются посредством управляющего устройства и соответствующей машины, описанных и охарактеризованных в соответствующих независимых пунктах формулы изобретения. Преимущественные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения. Конкретный вариант осуществления предложенного решения преимущественно позволяет конструировать устройство и машину, в которых можно варьировать по желанию частоту и/или амплитуду, с-2 016121 которой движущаяся опора перемещается с помощью возвратно-поступательного движения, в расчете на каждый оборот поворотного штифта и, следовательно, средства регистрации, удобно и быстро. Еще преимущественно предложенное решение позволяет конструировать устройство и машину, в которые можно вносить изменения, чтобы изменять соотношение между временем, необходимым для проверки контейнеров, и фактическим временем на каждый оборот карусельного механизма. Еще преимущественно предложенное решение позволяет осуществлять устройство, в котором техническое обслуживание для замены любых неисправных компонентов проще, чем для аналогичных устройств известного типа. Цели и преимущества, описанные выше, должны подробно выделяться в описаниях некоторых предпочтительных вариантов осуществления изобретения, приводимых в качестве примеров, без ограничения, со ссылкой на прилагаемые чертежи, на которых: каждая из фиг. 1-3 показывает схематический вид и вид сверху устройства изобретения в одинаковом числе рабочих положений; фиг. 4 показывает схематический вид сбоку, в частичном разрезе, устройства, показанного на фиг. 1; каждая из фиг. 5a-5h показывает схематический вид сверху идентичного числа разновидностей некоторых компонентов устройства, показанного на фиг. 1; каждая из фиг. 6a-6p показывает вид в разрезе идентичного числа разновидностей некоторых компонентов устройства изобретения; каждая из фиг. 7-9 показывает вид сверху другого примера устройства, осуществленного согласно изобретению; фиг. 10 показывает схематический вид сбоку, в частичном разрезе, устройства, показанного на фиг. 7; фиг. 11 показывает схематический вид сбоку, в частичном разрезе, другого примера устройства,осуществленного согласно изобретению; фиг. 12 показывает вид в перспективе машины или системы, которая также является предметом изобретения; фиг. 13 показывает вид сверху некоторых частей машины или системы, показанной на фиг. 12; фиг. 14 является видом в поперечном сечении машины или системы, показанной на фиг. 12; фиг. 15 является видом в поперечном сечении некоторых частей машины или системы, показанной на фиг. 12; фиг. 16 показывает вид в разрезе сверху, вдоль горизонтальной плоскости, некоторых частей машины или системы, показанной на фиг. 12; фиг. 17 показывает вид сбоку поперечного сечения другого примера машины, осуществленной согласно изобретению; фиг. 18 подробнее показывает некоторые части машины, показанной на фиг. 17; каждая из фиг. 19-24 показывает вид сверху некоторых частей машины, показанной на фиг. 12,причем каждый чертеж иллюстрирует различное рабочее положение. Прежде всего, важно указать, что соответствующие компоненты в различных примерах вариантов осуществления указываются посредством идентичных номеров ссылок. Индикаторы положения, приведенные в различных примерах варианта осуществления, должны переноситься в новое положение. Хотя последующее описание, осуществленное со ссылкой на вышеуказанные чертежи, иллюстрирует некоторые конкретные варианты осуществления настоящего изобретения, очевидно, что изобретение не ограничено упомянутыми конкретными вариантами осуществления, наоборот, отдельные варианты осуществления, описанные ниже, проясняют различные аспекты настоящего изобретения, объем и цель которого заданы в формуле изобретения. Некоторые примеры варианта осуществления изобретения, описанного ниже, упоминаются как система для проверки и обследования множества контейнеров и/или продукта, содержащегося в них. Более конкретно, описанная система является системой для проверки контейнеров, содержащих фармацевтические продукты, которая использует управляющее устройство, осуществленное согласно изобретению. Тем не менее, очевидно, что предложенное решение может применяться к любой машине или системе, причем часть этой машины или системы должна выполнять конкретное движение вперед/назад или так называемое возвратно-поступательное движение, предпочтительно вокруг центра вращения, например, чтобы сопровождать и проверять последовательность контейнеров, направляемых на транспортировочной линии. Управляющее устройство, осуществленное согласно изобретению, представлено на фиг. 1-4, на которых оно указано целиком посредством 1. Оно содержит средство, указанное целиком посредством 2, выполненное с возможностью перемещать по меньшей мере одну опору 3, также называемую ползунком, с помощью возвратнопоступательного движения вокруг первой оси 4. Согласно изобретению средство 2 содержит один или более постоянныхмагнитов 5, размещенных вдоль по меньшей мере одной секции круговой траектории, которая является концентрической с осью 4,-3 016121 и по меньшей мере одну обмотку 6, причем упомянутая обмотка 6 управляется посредством модуля 7 управления. Если обобщить, управляющее устройство 1 содержит по меньшей мере две части, которые двигаются с возвратно-поступательным движением, чтобы получать управляемое колебание вокруг оси 4 по любому закону движения. Если обобщить, магниты размещаются вдоль по меньшей мере одной секции криволинейной траектории, предпочтительно искривленной, более конкретно круговой. В предпочтительном неограничивающем варианте осуществления изобретения, проиллюстрированном в данном документе, опора или ползунок 3 является неразъемным с обмоткой 6, которая может идти вдоль второй круговой направляющей, не проиллюстрирована, концентрической с направляющим элементом 8. В конкретном неограничивающем варианте осуществления изобретения, проиллюстрированном в данном документе, постоянные магниты 5 размещаются на круговом направляющем элементе 8. Более точно, постоянные магниты 5 размещаются рядом с инвертированной полярностью и формируют постоянное магнитное поле, которое взаимодействует с магнитным полем, генерируемым посредством обмотки 6, когда обмотка активирована посредством модуля 7 управления. Более точно, модуль 7 управления посредством надлежащего варьирования напряжения и/или тока в обмотке 6 (например, варьирования формы сигнала, частоты и амплитуды) также варьирует направление движения опоры 3. Это позволяет получать требуемое движение вперед/назад, также называемое колебательным движением, вокруг оси 4, схематично показанное на фиг. 1-3, которое может иметь любую амплитуду, как подробнее проиллюстрировано ниже. Более конкретно, в показанном примере ползунок стартует из первого положения, показанного на фиг. 1, и достигает второго внешнего положения, показанного на фиг. 3, чтобы последовательно возвращаться в положение, показанное на фиг. 1, перемещаясь в пределах угла A, как показано на фиг. 3. Также следует отметить, что посредством варьирования напряжения и/или тока в обмотке (например, варьирования формы сигнала, частоты и амплитуды) этот модуль управления варьирует силу отталкивания между обмоткой 6 и постоянными магнитами 5, тем самым формируя относительное движение между обмоткой 6 и магнитами 5 на различных скоростях и обеспечивая получение переменного ускорения и интенсивности торможения. В качестве альтернативы, обмотка 6 может фиксироваться и движущаяся опора или ползунок 3 может быть неразъемным с круговым направляющим элементом 8, который в этом случае перемещается вокруг оси 4. Другими словами, в этой разновидности он является кольцом 8, неразъемным с ползунком 3, который перемещается в то время, когда обмотка 6 зафиксирована. Это преимущественно позволяет исключать использование, например, электрических скользящих контактов, необходимых для предоставления питания в обмотку 6, или позволяет не допускать механического напряжения на питающие кабели, а также сокращать число движущихся частей. Также очевидно, что обмотка 6 и кольцо 8 могут иметь любую форму при условии, что поверхности при возвратно-поступательном движении соединены. Также очевидно, что обмотка 6 и кольцо 8 могут иметь любой размер при условии, что поверхности при возвратно-поступательном движении соединены. Вышеприведенное также является допустимым, если эти поверхности вырождаются в точку или линию. Это происходит, например, когда обмотка 6 является параллелепипедом. В этом случае, фактически, обмотка и круговой элемент 8, имеющие многоугольное поперечное сечение, соединены по линии. Если круговой элемент имеет круговое поперечное сечение, а обмотка 6 является параллелепипедом, эти два компонента соединяются в области на минимальном расстоянии, т.е. в точке. Что касается модуля 7 управления, он предпочтительно содержит микропроцессор. Более конкретно, упомянутый модуль 7 управления может содержать PLC и/или компьютер, и/или микропроцессор, и/или привод от электродвигателя и иметь интерфейсное средство (не проиллюстрировано), содержащее, например, дисплеи, клавиатуры, мыши и т.д. Упомянутое интерфейсное средство позволяет задавать рабочие параметры устройства 1. Более конкретно, оператор с использованием вышеуказанного интерфейсного средства может задавать скорость ползунка 3 или тип движения, чтобы, например, инструктировать ползунку выполнять равномерное и/или неравномерное колебание, но с переменными ускорениями и/или скоростями. В качестве альтернативы, оператор может определять время или длительность цикла вперед/назад, или число циклов в единицу времени (частоту) для цикла вперед/назад, или амплитуду этих колебаний и т.д. Каждая из фиг. 5a-5h представляет различный вариант осуществления устройства, описанного выше. В частности, эти варианты осуществления отличаются друг от друга числом обмоток, указанных посредством 6, и положением, допускаемым посредством каждой обмотки 6 относительно элемента 8 и,следовательно, магнитов 5. Более конкретно, на фиг. 5a устройство содержит восемь обмоток, размещенных напротив внешней поверхности кругового элемента.-4 016121 На фиг. 5b устройство содержит одну обмотку, размещенную в круговом элементе. На фиг. 5c устройство содержит восемь обмоток, все из которых размещаются напротив внутренней поверхности кругового элемента. На фиг. 5d устройство содержит одну обмотку, размещенную напротив как внутренней поверхности, так и внешней поверхности кольцеобразного элемента. На фиг. 5e устройство содержит восемь обмоток, каждая из которых размещена напротив как внутренней поверхности, так и внешней поверхности кольцеобразного элемента. На фиг. 5f устройство содержит одну кольцеобразную обмотку, размещенную напротив внешней поверхности кольцеобразного элемента. На фиг. 5g устройство содержит одну кольцеобразную обмотку, размещенную напротив как внутренней, так и внешней поверхности кольцеобразного элемента. На фиг. 5h устройство содержит одну кольцеобразную обмотку, размещенную точно напротив внутренней поверхности кольцеобразного элемента, содержащего постоянные магниты. Также очевидно, что элемент 8, содержащий постоянные магниты, может иметь другую геометрическую форму при условии, что она не является прямолинейной. Более конкретно, упомянутый элемент 8, например, может обнаруживаться на секции окружности. Также очевидно, что элемент 8, содержащий постоянные магниты 5, и обмотка 6 могут иметь различные поперечные сечения. В качестве примера, фиг. 6a-6p показывают некоторые различные поперечные сечения обмотки,указанной посредством 6, а также опорного элемента 8 для магнитов 5. На вышеуказанных чертежах обмотка 6 и элемент 8, содержащий постоянные магниты 5, имеют смешанную секцию, как на фиг. 6a или 6o, либо многоугольную, как на фиг. 6b, 6d, 6e, 6f, 6g, 6h, 6i, 6l,6m, 6n, 6p, либо круглую, как на фиг. 6a, 6c, 6e, 6o, либо комбинации перечисленного. Очевидно, что в других вариантах осуществления изобретения поперечные сечения обмотки и опоры могут быть инвертированы со ссылкой на фиг. 6a-6p. Другими словами, со ссылкой на фиг. 6a-6p,геометрия обмотки 6 может быть геометрией элемента 8, а секция элемента 8 может быть секцией обмотки, указанной посредством 6. Дополнительный вариант конструкции устройства изобретения, указанного целиком посредством 100 на фиг. 7-10, отличается от предыдущих тем, что модуль 7 управления взаимодействует со средством 9, выполненным с возможностью регистрировать частоту вращения поворотного штифта 10, чтобы управлять средством 2 таким образом, чтобы сохранять относительную скорость равной нулю между опорой 3 и поворотным штифтом 10 в течение данного интервала времени. Другими словами, модуль 7 управления воздействует на средство 2 таким образом, чтобы обеспечивать то, что опорный элемент 3 перемещается с помощью возвратно-поступательного движения, сохраняя одинаковую угловую скорость для ползунка и опоры для данного угла B. Очевидно, что углы A и B могут задаваться оператором через модуль 7 управления. Также следует отметить, что в конкретном неограничивающем варианте осуществления, представленном в данном документе, первая ось 4 и вторая ось 11, помимо параллельности друг другу, совпадают с осью штифта 10. Более точно, в показанном примере все они являются совпадающими. Что касается средства 9, выполненного с возможностью регистрировать частоту вращения поворотного штифта, оно содержит измерительный преобразователь, предпочтительно состоящий из кодера или динамомашины спидометра. Что касается поворотного штифта 10, он вращается посредством приводного средства 12, содержащего в неограничивающем примере, проиллюстрированном в данном документе, модуль редукторного электродвигателя, включающий в себя электродвигатель. Дополнительный вариант конструкции устройства, которое является предметом изобретения, указанного целиком посредством 200 на фиг. 11, отличается от предыдущих тем, что оно также содержит второе средство 14, управляемое посредством модуля 7 управления, причем упомянутое второе средство выполнено с возможностью перемещения штифта 10 с помощью вращательного движения относительно второй оси 11. В этом случае преимущественно модуль 7 управления воздействует одновременно как на средство,которое перемещает штифт 10, так и на средство, которое перемещает ползунок, тем самым гарантируя дополнительную и большую точность управления и синхронизации этих двух движений, вращательного(штифта 10) и колебательного (опоры 3). Также в этом случае следует отметить, что первая и вторая оси 4 являются параллельными друг другу. Более точно, в примере, проиллюстрированном в данном документе, они являются совпадающими. Очевидно, что в других вариантах осуществления изобретения они могут быть параллельными, но не совпадающими. Что касается второго средства 14, оно предпочтительно содержит электродвигатель, управляемый посредством модуля 7 управления, содержащего вал с системой кинематических перемещений, выполненный с возможностью вращать штифт 10. Эта система кинематических перемещений в общем содержит механический редукторный электродвигатель.-5 016121 Фиг. 12 показывает предпочтительный, но неограничивающий вариант осуществления системы или машины для проверки и обследования контейнеров и/или их содержимого, указанной целиком посредством 500, которая является также предметом настоящего изобретения. Машина, указанная целиком посредством номера 500, выполнена с возможностью проверять состояния и содержимое контейнеров 501, содержащих, например, фармацевтический продукт. Она содержит, как подробнее поясняется ниже, управляющее устройство типа, описанного выше. Более конкретно, машина 500 содержит, как показано подробно на фиг. 13 загрузочный модуль для контейнеров, которые должны проверяться, указанный целиком посредством 502; опорно-поворотное средство 503, содержащее множество посадочных мест 504, размещенных рядом друг с другом, каждое из которых выполнено с возможностью принимать из загрузочного модуля 502 контейнер 501, который должен проверяться; средство 505 для регистрации характеристик, которые должны проверяться для контейнера 501,располагающееся напротив по меньшей мере одного из вышеуказанных посадочных мест 504; управляющее устройство 1, подробно показанное на фиг. 14, выполненное с возможностью сохранять относительную скорость равной нулю между контейнером 501, размещенным на опоре 503, когда он вращается, и средством 505 регистрации, причем упомянутое устройство 1 выполнено с возможностью сохранять упомянутую относительную скорость равной нулю в течение определенного интервала времени и/или для определенного угла, необходимого для регистрации характеристик бутылки 501, которая должна проверяться; разгрузочный модуль 506 для проверенных контейнеров 501, выполненный с возможностью собирать проверенные контейнеры с опорно-поворотного механизма 503, чтобы выводить их из машины или возвращать в машину. Управляющее устройство 1 выполнено с возможностью сохранять одинаковую угловую скорость как для средства 504 опоры, вращающегося вокруг оси 11, так и для средства 505 регистрации, которое перемещается с помощью возвратно-поступательного движения вокруг оси 4. Более конкретно, упомянутая угловая скорость сохраняется постоянной для угла, который может задаваться оператором, и является такой, чтобы обеспечивать корректное измерение параметров, которые должны проверяться посредством средства 505 регистрации. Согласно изобретению управляющее устройство состоит из одного из управляющих устройств,описанных выше. Более конкретно, в предпочтительном варианте осуществления изобретения, представленном в данном документе, упомянутое средство содержит обмотку 6, являющуюся неразъемной с каркасом 510 системы, и опорный элемент 3 для постоянных магнитов в форме кольцеобразного элемента 8. Опорный элемент 3 состоит в примере из кольцеобразного элемента, который соединен с возможностью вращения посредством подшипников 509 со штифтом 511, прикрепленным к каркасу 510. Средство 505 регистрации является неразъемным с элементом 3. Что касается опорно-поворотного средства 504, оно предпочтительно содержит цилиндр 513 или первый диск, также называемый карусельным механизмом, радиально содержащий множество посадочных мест 504, как показано на фиг. 13, размещенных рядом друг с другом, каждое из которых выполнено с возможностью принимать из загрузочного модуля 502 контейнер 501, который должен проверяться, как можно видеть также на фиг. 16. Это средство 504 также содержит прижимающие устройства, не проиллюстрированные в данном документе, выполненные с возможностью прижимать контейнер 501 к стенке посадочного места 504. Упомянутый цилиндр 513 является неразъемным с поворотным штифтом 515 и перемещается посредством приводного средства 516, состоящего из модуля редукторного электродвигателя, содержащего электродвигатель. В предпочтительном варианте осуществления изобретения, проиллюстрированном в данном документе, средство 516 не управляется посредством модуля 7 управления. Средство 505 регистрации размещается по периметру цилиндра 513, и, как пояснено выше, оно располагается напротив вышеуказанных посадочных мест 504, как показано также на фиг. 16. Упомянутое средство 513 регистрации состоит из датчиков. В неограничивающем примере варианта осуществления, проиллюстрированного в данном документе, упомянутые датчики содержат оптические датчики, точнее камеры. Тем не менее, очевидно, что эти датчики могут иметь любой тип, например датчики температуры или другие типы датчиков, и могут использовать различные технологии, например ультразвуковую технологию. Относительно загрузочного модуля 502, он, по сути, содержит второй диск 518, соединенный с возможностью вращения с соответствующим штифтом 519, называемый загрузочным зубчатым колесом,а разгрузочный модуль 506 содержит третий диск 520, называемый разгрузочным зубчатым колесом,соединенный с возможностью вращения с соответствующим штифтом 521. Как второй, так и третий диск 518 и 520 содержат множество посадочных мест 522, размещенных рядом друг с другом, каждое из которых выполнено с возможностью принимать бутылку 501.-6 016121 Более конкретно, второй диск 518 выполнен с возможностью принимать контейнеры 501, поступающие из входного транспортировочного модуля, не проиллюстрированного в данном документе, и устанавливать их в посадочные места 504 карусельного механизма 513. Третий диск 520 выполнен с возможностью забирать контейнеры (так называемые бутылки) 501 с карусельного механизма 510 и размещать их, по меньшей мере, на одном модуле транспортировки и сортировки, содержащем несколько разгрузочных каналов 523, как показано на фиг. 12. Более точно, надлежащие приводные устройства позволяют транспортировать контейнеры 501 в направлении различных разгрузочных каналов 523 согласно параметрам, зарегистрированным посредством датчиков. Фиг. 18 и 19 показывают другой вариант осуществления машины, сконструированной согласно изобретению, указанной целиком посредством 600. Упомянутая машина 600 отличается от предыдущих тем, что элемент 8 является неразъемным с каркасом 510 и обмотка 6 перемещается относительно оси 4 и поддерживает средство 505 регистрации. На практике согласно проектному режиму работы системы контейнеры, направляемые посредством транспортировочного модуля с силовым приводом, вводятся в посадочные места, размещаются радиально на втором диске 518, который вращается, и последовательно переносятся в посадочные места 504 в карусельном механизме для проверки. После достижения этого положения контейнер 501 продолжает вращение вокруг оси 4, 11, и после проверки он поступает на уровень разгрузочного модуля 506, на котором он собирается посредством упомянутого разгрузочного модуля 506 и транспортируется в направлении одного из выходов согласно зарегистрированным характеристикам. Когда бутылка, которая должна проверяться, достигает средства 505 регистрации, модуль 7 управления активирует обмотку 6, которая формирует магнитное поле, и перемещает средство 505 регистрации, ускоряя его до достижения угловой скорости, идентичной скорости карусельного механизма, как показано на фиг. 19 и 20. Модуль 7 управления в таком случае сохраняет угловую скорость, достигнутую посредством ползунка 3 и, следовательно, средства 505 регистрации, постоянной в течение заданного времени и для заданного угла, тем самым обеспечивая проверку параметров бутылки. Когда проверка выполнена, модуль управления замедляет ползунок до остановки, как показано на фиг. 21 и 22, затем инвертирует направление движения, как показано на фиг. 23, и возвращает средство регистрации в исходное положение, как показано на фиг. 24. Следует отметить, что в показанном примере средство регистрации состоит из трех пар камер 530,которые тем самым обеспечивают возможность проверки шести контейнеров в расчете на цикл вперед/назад. Другими словами, проверка контейнеров, размещенных на карусельном механизме, выполняется автоматически посредством одного или более датчиков, которые сопровождают бутылку вдоль секции оборота карусельного механизма, таким образом гарантируя, что в этой секции относительная скорость между бутылкой и датчиками равна нулю. В конце этой секции датчики уменьшают свою скорость до тех пор, пока их скорость не становится нулевой, а затем инвертируют свое направление и возвращаются в начальную точку в готовности снова ускоряться и доходить, и совмещаться со следующим контейнером, чтобы проверять его. После проверки контейнеры согласно заданным параметрам продвигаются к модулю транспортировки и сортировки, в противном случае они отбраковываются или обрабатываются повторно. Очевидно, что в системе, которая является предметом изобретения, управляющее устройство также может не управлять напрямую приводным средством, которое перемещает карусельный механизм. В этом случае управляющее устройство (так называемое синхронизирующее устройство) содержит средство 9 для регистрации угловой скорости карусельного механизма, который совместно с модулем 7 управления, следовательно, должен перемещать датчики 505 с помощью возвратно-поступательного движения. Из вышеприведенного описания очевидно, что предложенное решение обеспечивает достижение вышеуказанных целей и преодолевает вышеописанные недостатки. Хотя изобретение описано со ссылкой на прилагаемые чертежи, оно может подвергаться модификациям на последующих стадиях реализации, все из которых должны подпадать под объем изобретения,определенный в прилагаемой формуле изобретения, и, следовательно, должны охватываться посредством настоящего патента. Также стоит отметить, что, если характеристики, упомянутые в прилагаемой формуле изобретения, сопровождаются ссылками с номером, они используются просто для того, чтобы упрощать удобочитаемость самой формулы изобретения и не должны рассматриваться как каким-либо образом ограничивающие ее интерпретацию. Важно подчеркнуть, кроме того, что все компоненты могут заменяться посредством других, технически эквивалентных частей и что любые материалы могут использоваться при условии, что они совместимы с целевым использованием, и различные элементы могут иметь любой размер в зависимости от необходимости.-7 016121 ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Управляющее устройство (1, 100, 200), содержащее средство (2), выполненное с возможностью перемещать по меньшей мере одну опору (3) с помощью возвратно-поступательного движения (A) вокруг первой оси (4), при этом средство (2) содержит один или более постоянных магнитов (5), размещенных вдоль по меньшей мере одной секции окружности, которая является концентрической с упомянутой осью (4), и по меньшей мере одну обмотку (6), которая управляется посредством модуля (7) управления,при этом упомянутый модуль (7) управления надлежащим образом варьирует напряжение и/или ток по меньшей мере в одной обмотке (6), чтобы варьировать направление движения по меньшей мере одной опоры (3), причем по меньшей мере одна опора является неразъемной либо по меньшей мере с одной обмоткой (6), либо с одним или более постоянными магнитами (5), отличающееся тем, что по меньшей мере одна опора (3) размещается вокруг поворотного штифта (10), при этом первая ось (4) и ось (11) штифта (10) являются параллельными друг другу и совпадающими, и при этом штифт (10) вращается посредством отдельного приводного средства (12) и может вращаться независимо от по меньшей мере одной опоры (3); тем, что упомянутое устройство также содержит средство (9), выполненное с возможностью регистрировать частоту вращения поворотного штифта (10) и взаимодействующее с модулем (7) управления, и тем, что модуль (7) управления управляет упомянутым средством (2), выполненным с возможностью перемещать по меньшей мере одну опору (3) таким образом, чтобы сохранять относительную скорость равной нулю по меньшей мере между одной опорой (3) и поворотным штифтом (10) в течение данного интервала времени и/или для данного угла (B). 2. Устройство по п.1, отличающееся тем, что один или более постоянных магнитов (5) размещаются рядом с инвертированной полярностью и генерируют постоянное магнитное поле, которое взаимодействует с магнитным полем, генерируемым посредством по меньшей мере одной обмотки (6), когда обмотка активирована посредством модуля (7) управления. 3. Устройство по любому из предшествующих пунктов, отличающееся тем, что модуль (7) управления предпочтительно содержит микропроцессор, и/или PLC, и/или компьютер, и/или привод для электродвигателей. 4. Устройство по любому из предшествующих пунктов, отличающееся тем, что модуль (7) управления также содержит интерфейсное средство. 5. Устройство по п.4, отличающееся тем, что интерфейсное средство содержит дисплей, и/или клавиатуру, и/или мышь. 6. Устройство (100) по любому из пп.1-5, отличающееся тем, что амплитуда (A) упомянутого колебания и упомянутый угол (B), для которых угловые скорости между упомянутой по меньшей мере одной опорой (3) и поворотным штифтом (10) являются идентичными, могут задаваться через модуль (7) управления. 7. Устройство (100) по любому из предшествующих пунктов, отличающееся тем, что упомянутое средство (9), выполненное с возможностью регистрации частоты вращения поворотного штифта (10),содержит измерительный преобразователь. 8. Устройство (100) по п.7, отличающееся тем, что измерительный преобразователь содержит кодер и/или динамомашину спидометра. 9. Устройство (100) по любому из предшествующих пунктов, отличающееся тем, что приводное средство содержит электродвигатель. 10. Устройство (200) по п.9, отличающееся тем, что приводное средство управляется посредством модуля (7) управления. 11. Машина (500, 600) для проверки и обследования контейнеров (501) и/или их содержимого, содержащая загрузочный модуль (502) для контейнеров, которые должны проверяться; опорно-поворотное средство (503), содержащее множество посадочных мест (504), каждое из которых выполнено с возможностью принимать один контейнер (501), который должен проверяться, из загрузочного модуля (502); средство (505) для регистрации характеристик контейнера (501), который должен проверяться; управляющее устройство, выполненное с возможностью сохранять относительную скорость равной нулю между средством (505) регистрации и контейнером (501), размещенным на средстве (503) опоры,когда средство опоры вращается, причем устройство выполнено с возможностью сохранять относительную скорость равной нулю в течение периода времени и/или для угла, необходимого для того, чтобы регистрировать характеристики контейнера (501), который должен проверяться; разгрузочный модуль (506), выполненный с возможностью собирать проверенные контейнеры (501) с опорно-поворотного механизма (503), чтобы выводить их из машины или возвращать в машину; отличающаяся тем, что управляющее устройство осуществлено по любому из пп.1-10, причем упомянутая по меньшей мере одна опора (3) является неразъемной с упомянутым средством (505) регистрации. 12. Машина по п.11, отличающаяся тем, что упомянутая по меньшей мере одна обмотка (6) является неразъемной с каркасом (510) машины.-8 016121 13. Машина по п.12, отличающаяся тем, что средство (505) регистрации является неразъемным с одним или более постоянными магнитами (5). 14. Машина по п.13, отличающаяся тем, что по меньшей мере один опорный элемент (3) для постоянных магнитов (5) содержит кольцеобразный элемент (8), соединенный с возможностью вращения со штифтом (511), прикрепленным к каркасу (510) машины посредством подшипников (509). 15. Машина по п.11 или 12, отличающаяся тем, что средство (505) регистрации является неразъемным по меньшей мере с одной обмоткой (6). 16. Машина по любому из пп.11-15, отличающаяся тем, что опорно-поворотное средство (504) предпочтительно содержит цилиндр (513), радиально содержащий посадочные места (504), размещенные рядом. 17. Машина по п.16, отличающаяся тем, что цилиндр (513) является неразъемным с поворотным штифтом (515) и приводится посредством приводного средства (516). 18. Машина по п.17, отличающаяся тем, что приводное средство содержит модуль редукторного электродвигателя, содержащий электродвигатель. 19. Машина по любому из пп.11-18, отличающаяся тем, что средство (505) регистрации размещается по периметру средства (513) опоры, располагаясь напротив посадочных мест (504). 20. Машина по любому из пп.11-19, отличающаяся тем, что средство (515) регистрации состоит из датчиков. 21. Машина по п.20, отличающаяся тем, что датчики являются оптическими и/или ультразвуковыми датчиками. 22. Машина по любому из пп.11-21, отличающаяся тем, что загрузочный модуль (502) содержит второй диск (518), соединенный с возможностью вращения с соответствующим штифтом (519) и содержащий множество посадочных мест, размещенных рядом друг с другом. 23. Машина по любому из пп.11-22, отличающаяся тем, что разгрузочный модуль (506) содержит третий диск (520), соединенный с возможностью вращения с соответствующим штифтом (521) и содержащий множество посадочных мест, размещенных рядом друг с другом. 24. Машина по любому из пп.11-23, отличающаяся тем, что упомянутое средство (9), выполненное с возможностью регистрации частоты вращения поворотного штифта (10) упомянутого устройства, регистрирует частоту вращения упомянутого опорно-поворотного средства (503).
МПК / Метки
МПК: H02K 41/03, G01N 21/90, H02K 33/16, H02K 33/18, H02K 7/14
Метки: предпочтительно, машин, управляющее, соответствующая, машина, контейнеров, содержимого, проверки, устройство, контроля
Код ссылки
<a href="https://eas.patents.su/18-16121-upravlyayushhee-ustrojjstvo-predpochtitelno-dlya-mashin-dlya-kontrolya-i-proverki-kontejjnerov-i-ili-ih-soderzhimogo-i-sootvetstvuyushhaya-mashina.html" rel="bookmark" title="База патентов Евразийского Союза">Управляющее устройство предпочтительно для машин для контроля и проверки контейнеров и/или их содержимого и соответствующая машина</a>
Устройство с системами нагревания и температурного контроля жидкости в отдельном контейнере и в различных наборах контейнеров для парентеральных растворов
Номер патента: 8262
Опубликовано: 27.04.2007
Авторы: Корреа Биттенкоурт Жоао Боско, Алвес Переира Жозе Эдуардо
МПК: G05D 23/00, A61M 5/44
Метки: различных, наборах, системами, жидкости, устройство, температурного, парентеральных, контейнеров, растворов, контейнере, нагревания, контроля, отдельном
Формула / Реферат:
1. Устройство с системами нагревания и температурного контроля жидкости в отдельном контейнере и в различных наборах контейнеров для парентеральных растворов, предназначенное для индивидуального размещения и хранения бутылок или пакетов с внутривенным раствором в нагревательном чехле (15), оснащенном изолирующим устройством (16) и изолированным проводником (23), соединенным с электрическим разъемом (36), и выполненное с возможностью...
Защита содержимого от незаконного воспроизведения с помощью проверки существования полного набора данных
Номер патента: 5605
Опубликовано: 28.04.2005
Автор: Эпстейн Михал А.
МПК: G06F 12/14
Метки: защита, незаконного, данных, содержимого, полного, помощью, проверки, воспроизведения, существования, набора
Формула / Реферат:
1. Способ воспрепятствования воровству содержательного материала, содержащий этапы, при которых собирают (310-335) множество элементов данных (210), составляющих содержательный материал, для формирования набора данных, размер которого установлен достаточно большим (335), чтобы препятствовать последующей передаче набора данных по каналу связи с ограниченной пропускной способностью, и связывают (350-360) каждый элемент данных из множества...
Управляющее устройство для электропитания с нулевым энергопотреблением в режиме ожидания
Номер патента: 9687
Опубликовано: 28.02.2008
Автор: Чжоу Сяньпу
МПК: H02M 7/12
Метки: ожидания, электропитания, режиме, энергопотреблением, нулевым, управляющее, устройство
Формула / Реферат:
1. Управляющее устройство для электропитания с нулевым энергопотреблением в режиме ожидания, содержащее драйвер, промежуточное реле, реле мощности, сигнальную индуктивную цепь, цепь контроля рабочего электропитания управляемого оборудования, цепь коммутации электропитания, однокристальный микрокомпьютер и батарею, при этом однокристальный микрокомпьютер управляет промежуточным реле посредством драйвера; промежуточное реле имеет нормально...
Управляющее устройство для установки заданного значения температуры пространства
Номер патента: 11647
Опубликовано: 28.04.2009
Авторы: Кляйн Ханс Йерген, Фог Ханс Эрик
МПК: F25D 29/00, G05D 23/19, H01H 37/04...
Метки: температуры, управляющее, пространства, установки, значения, устройство, заданного
Формула / Реферат:
1. Система для изменения температуры пространства (3) на основе выбранного пользователем заданного значения температуры пространства, содержащая устройство (2) изменения климата для изменения температуры пространства; температурный датчик (13) для обеспечения температурного сигнала, определяющего температуру пространства (3); управляющее устройство (8), содержащее основание (9) и ручку (10) и выполненное с возможностью установки заданного...
Способ и устройство для экстрагирования содержимого капсулы
Номер патента: 2717
Опубликовано: 29.08.2002
Авторы: Марийе Алан, Иоаким Альфред
МПК: A47J 31/40
Метки: экстрагирования, устройство, содержимого, капсулы, способ
Формула / Реферат:
1. Способ экстрагирования содержимого капсулы, имеющей плоскость симметрии, при котором указанную капсулу помещают в корпус (5, 6) средства экстрагирования (2), содержащего два зажимных элемента (3, 4), которые заключают между собой, каждый приблизительно одну половину, указанный корпус таким образом, что он располагается в средстве в плоскости, отклоненной от вертикальной плоскости, перемещают указанную капсулу в вертикальную плоскость таким...