Устройство, система и способ обследования канала трубы
Номер патента: 21436
Опубликовано: 30.06.2015
Авторы: Петерс Роберт Бауке, Хейнен Вильхельмус Хубертус Паулус Мария
Формула / Реферат
1. Устройство (100) для обследования канала (199) трубы, содержащее
средство (401) придания плавучести;
по меньшей мере один датчик (V, D, 107, Р, R, Т), выполненный с возможностью измерения скважинных параметров;
программируемый логический контроллер (180),
отличающееся тем, что устройство дополнительно содержит
трехходовой клапан (V2), средство (407) создания давления и выпускную линию,
при этом трехходовой клапан выполнен с возможностью регулирования потока текучей среды между средством (407) создания давления и средством (401) придания плавучести и между средством (401) придания плавучести и выпускной линией (406);
программируемый логический контроллер (180), связанный по меньшей мере с одним датчиком (V, D, 107, Р, R, Т) и выполненный с возможностью приема измеренных скважинных параметров и генерирования сигнала управления на основе измеренных скважинных параметров, принимаемых по меньшей мере с одного датчика (V, D, 107, Р, R, Т); и
при этом средство (407) создания давления выполнено с возможностью сообщения по текучей среде со средством (401) придания плавучести через трехходовой клапан (V2) таким образом, что текучая среда может проходить из средства (407) создания давления в средство (401) придания плавучести или из средства (401) придания плавучести в окружающую среду устройства (100) через выпускную линию (406);
при этом программируемый логический контроллер (180) связан с трехходовым клапаном (V2) и выполнен с возможностью управления трехходовым клапаном (V2) с помощью сигналов управления.
2. Устройство по п.1, в котором
первое средство (401) придания плавучести содержится в первой части (101) устройства (100);
средство (407) создания давления содержится во второй части (102) устройства (100);
второе средство (401) придания плавучести содержится в третьей части (103) устройства (100),
при этом первая часть и третья часть соединены через вторую часть и при этом вторая часть состоит из двух пустотелых деталей (202, 203), соединенных сферическим шарниром (201).
3. Устройство (100) по п.2, в котором первая из двух пустотелых деталей содержит пружину (205) и стержень (204), при этом один конец (207) стержня соединен со сферическим шарниром (201) и другой конец (207) стержня соединен с пружиной (205), при этом пружина (205) выполнена с возможностью удерживать две пустотелые детали второй части (102) на прямой линии.
4. Устройство (100) по п.3, в котором первая из пустотелых деталей дополнительно содержит три цилиндра (301), установленных перпендикулярно стержню для обеспечения смещения стержня от прямой линии.
5. Устройство (100) по любому из пп.2-4, в котором сферический шарнир (201) и стержень являются пустотелыми для обеспечения прохода соединения связи и/или сообщения текучей средой.
6. Устройство (100) по любому из пп.1-5, дополнительно содержащее множество гибких рычагов (110) с одним концом, соединенным с окружностью устройства (100), и другим концом, проходящим радиально от устройства (100) с радиусом больше радиуса устройства (100) и максимальным наружным диаметром, определяемым тканью, растянутой между гибкими рычагами (110).
7. Устройство (100) по п.6, выполненное с возможностью сокращения габарита другого конца множества гибких рычагов (110) до радиуса, приблизительно равного радиусу устройства при получении сигнала управления с программируемого логического контроллера (180).
8. Устройство (100) по любому из пп.1-7, дополнительно содержащее множество сопел (502), сообщающихся текучей средой со средством (407) создания давления, так чтобы обеспечить выпуск текучей среды под давлением из средства (407) создания давления по меньшей мере через одно из множества сопел (502).
9. Устройство (100) по п.8, в котором средство (407) создания давления выполнено с возможностью сообщения по текучей среде с множеством сопел (502) через группу (503) клапанов.
10. Устройство (100) по п.9, в котором программируемый логический контроллер (180) выполнен с возможностью регулирования установления сообщения текучей средой между средством (407) создания давления и множеством сопел (502) с помощью сигналов управления.
11. Устройство (100) по любому из пп.1-10, дополнительно содержащее средство (108) связи, связанное с внешним блоком связи для передачи данных по меньшей мере с одного датчика (V, D, 107, Р, R, Т) во внешний блок связи.
12. Устройство (100) по п.6, в котором средство (108) связи дополнительно выполнено с возможностью принимать сигналы управления с внешнего блока связи для управления устройством (100) с внешнего блока связи.
13. Устройство (100) по любому из пп.1-12, дополнительно содержащее первое средство обнаружения и второе средство обнаружения и в котором первое и второе средства обнаружения установлены на фиксированном расстоянии между ними, при этом устройство выполнено с возможностью определения разницы времен между приемом первого сигнала с первого средства обнаружения и, по существу, идентичного сигнала со второго средства обнаружения и определения скорости устройства делением фиксированного расстояния на разность времен.
14. Устройство по пп.1-13, содержащее блок синхронизации, синхронный со вторым блоком синхронизации, установленные связанными с передатчиком, при этом устройство выполнено с возможностью принимать сигнал с передатчика, переданный в заданное время, и вычислять на основе разницы времен между заданным временем и временем получения сигнала устройством и скорости звука в среде, в которой находится устройство, расстояния между передатчиком и устройством.
15. Устройство по пп.1-14, в котором устройство содержит компас, обеспечивающий обнаружение элементов, содержащих магнитные материалы, в канале трубы.
16. Устройство по любому из пп.1-14, содержащее первый датчик давления для измерения давления внутри устройства и второй датчик давления для измерения давления снаружи устройства, второе средство создания давления, обеспечивающее подачу газа внутрь устройства, причем первый и второй датчики давления и второе средство создания давления связаны с вычислительным средством, так что вычислительное средство выполнено с возможностью обеспечения компенсации перепада давления внутри и снаружи устройства с помощью подачи газа внутрь устройства.
17. Способ обследования канала (199) трубы устройством (100) по п.1, содержащий
установление связи между программируемым логическим контроллером 180 и по меньшей мере одним датчиком (V, D, 107, Р, R, Т), выполненным с возможностью измерения скважинных параметров и между программируемым логическим контроллером (180) и трехходовым клапаном (V2);
генерирование в программируемом логическом контроллере (180) сигнала управления на основе измеренных скважинных параметров, принимаемых по меньшей мере с одного датчика (V, D, 107, Р, R, Т);
установление сообщения текучей средой средства (407) создания давления со средством (401) придания плавучести через трехходовой клапан (V2), так что текучая среда может проходить из средства (407) создания давления в средство (401) придания плавучести или из средства (401) придания плавучести в окружающую среду устройства (100) через выпускную линию (406);
управление программируемым логическим контроллером (180) трехходовым клапаном (V2) с помощью сигналов управления так, что поток текучей среды между средством (407) создания давления и средством (401) придания плавучести и между средством (401) придания плавучести и выпускной линией (406) регулируется с помощью трехходового клапана (V2).
18. Скважинная система, содержащая канал (199) трубы и устройство по любому из пп.1-16.
19. Система по п.18, в которой канал (199) трубы является стволом скважины, содержащей воду или углеводороды нефти в виде текучей среды.
20. Система по п.18 или 19, в которой устройство (100) соединяется с каналом (199) трубы либо скважинным трактором или бурильной компоновкой.
21. Система по любому из пп.18-20, в которой канал (199) трубы относится к насосно-компрессорной колонне либо обсадной колонне или гибкой насосно-компрессорной трубе.
22. Система по любому из пп.18-21, в которой устройство (100) соединяется с бурильной компоновкой проводом.
23. Система по любому из пп.18-22, в которой устройство (100) эксплуатируют на каротажном кабеле и перекачивают в канале (199) трубы или в которой устройство (100) спускают в канал (199) трубы с использованием силы тяжести.

Текст
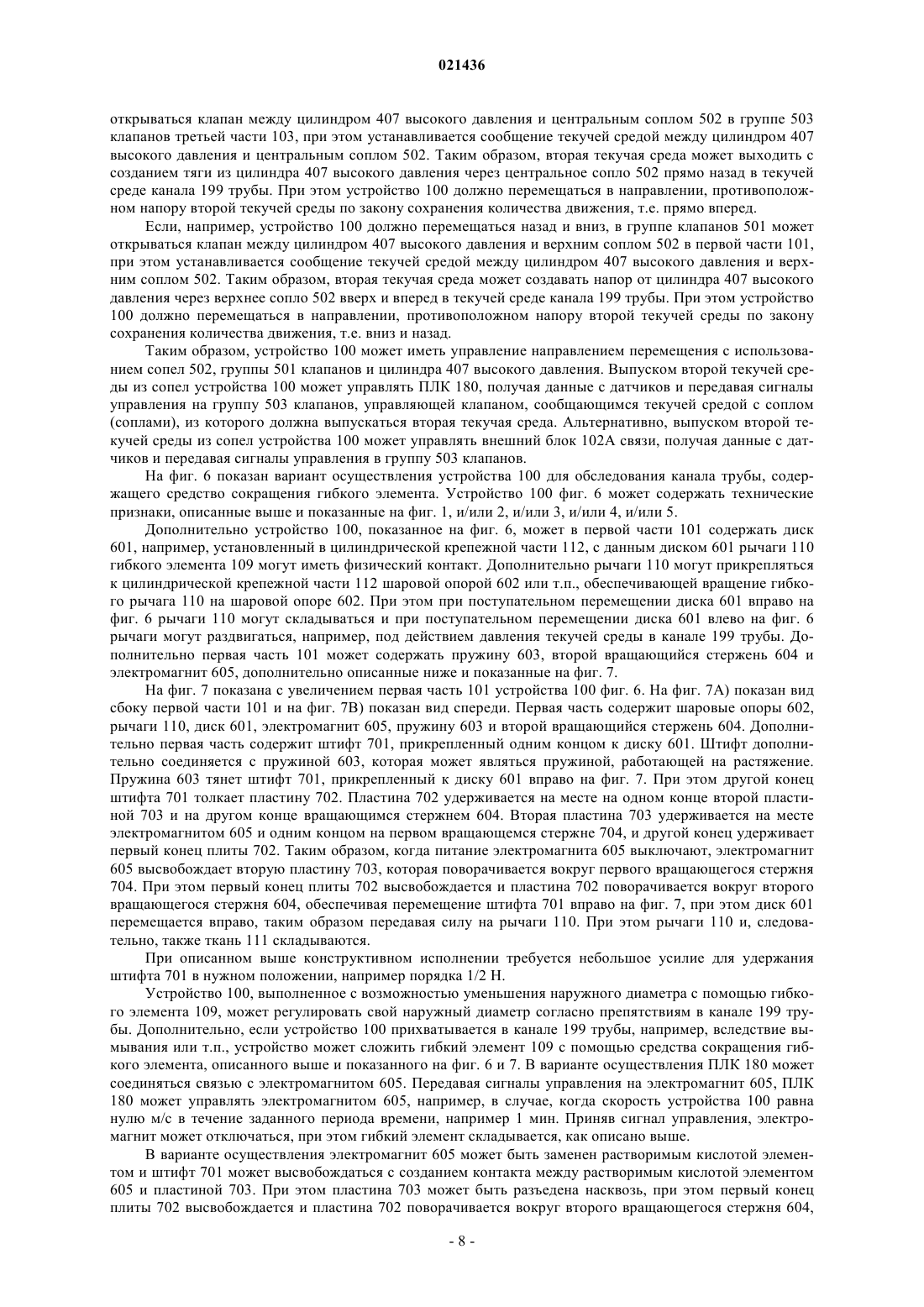
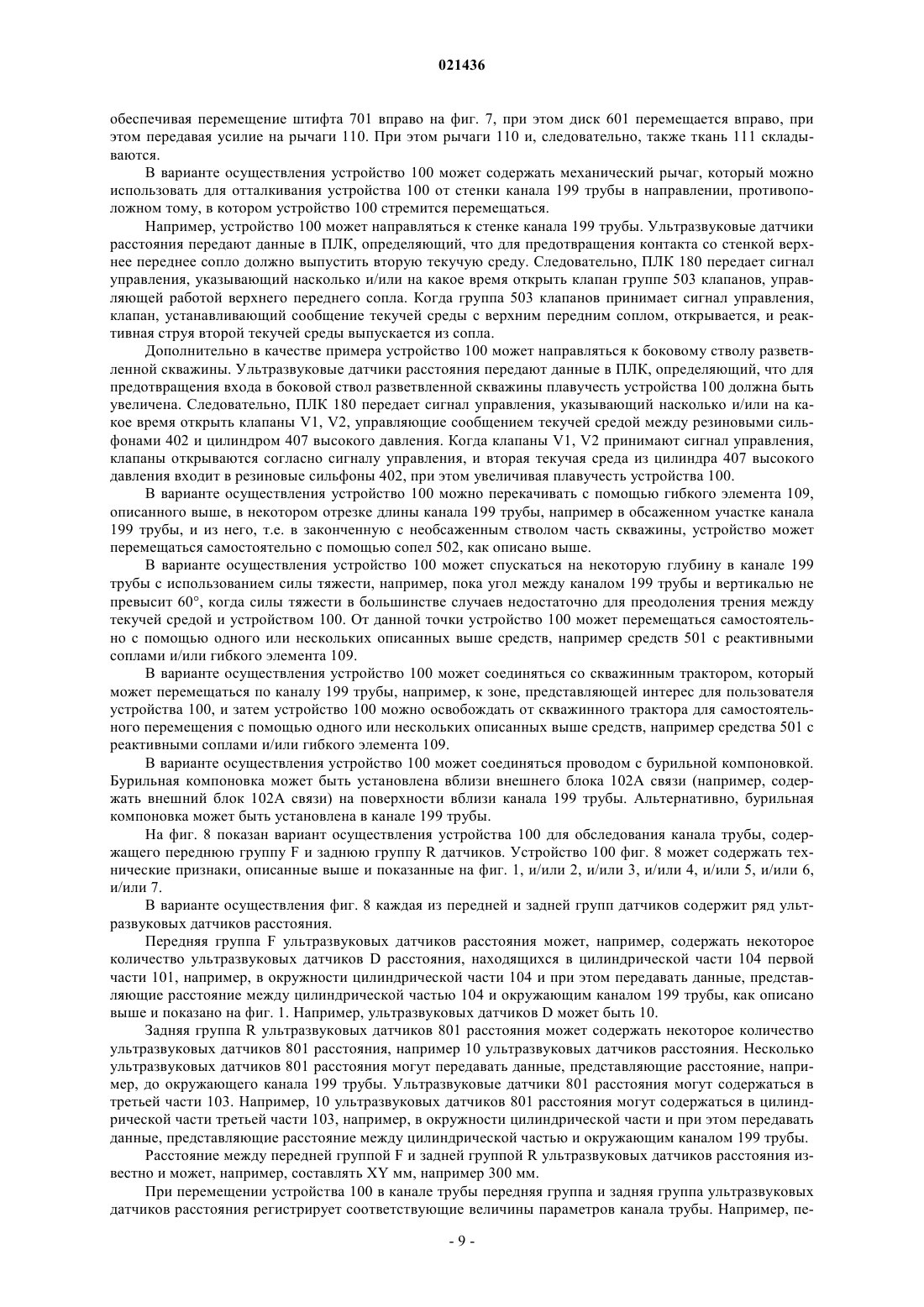
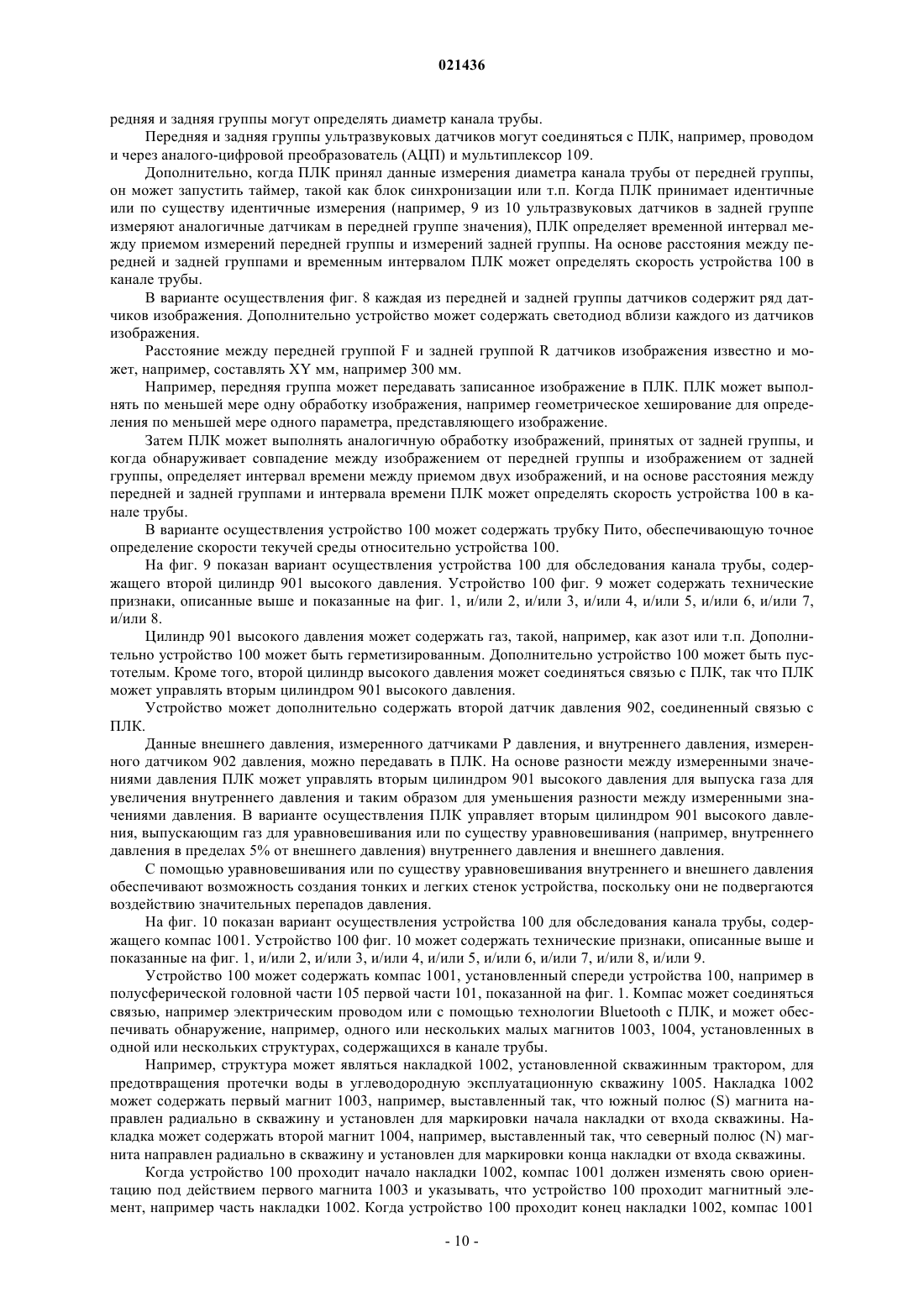
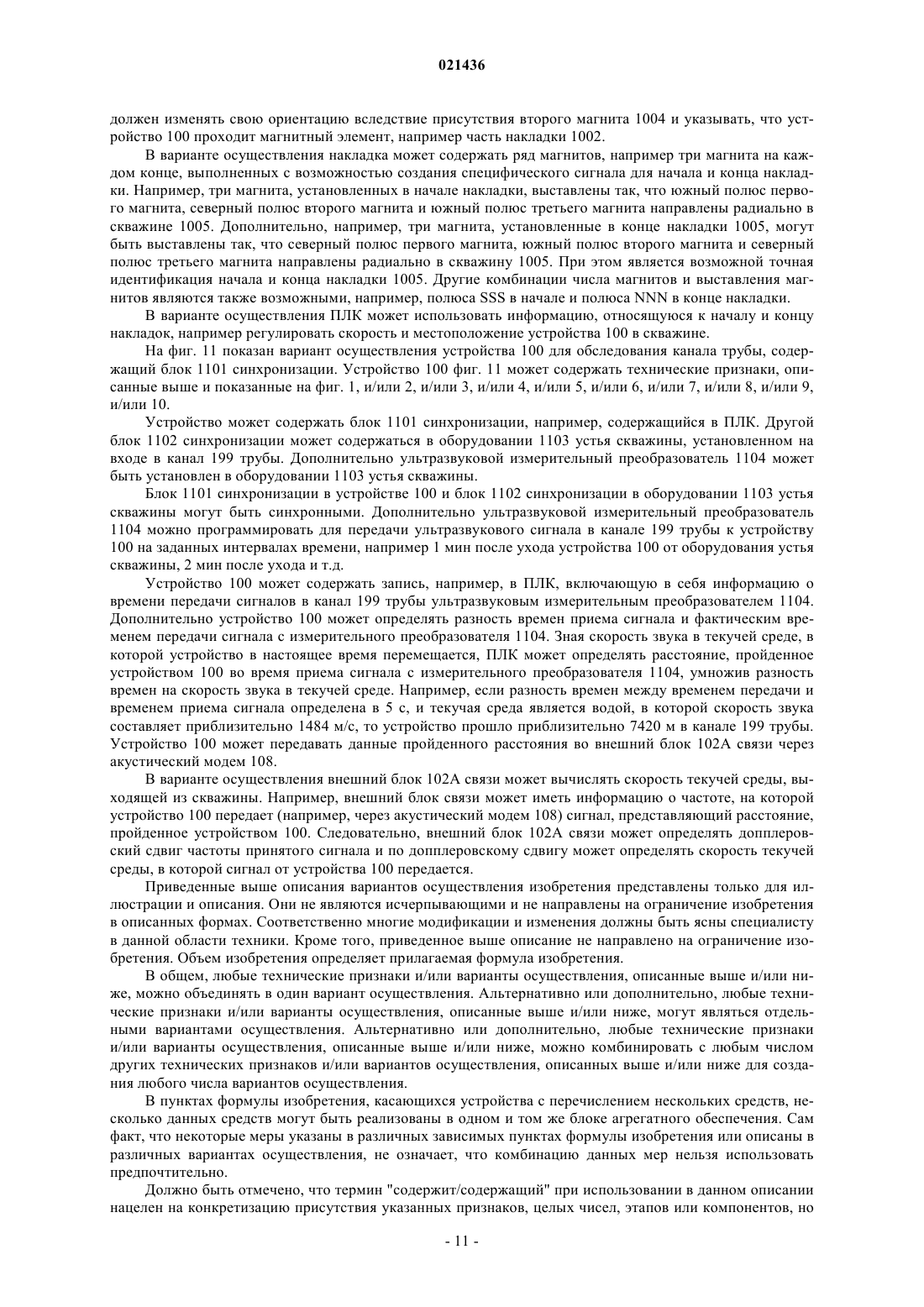
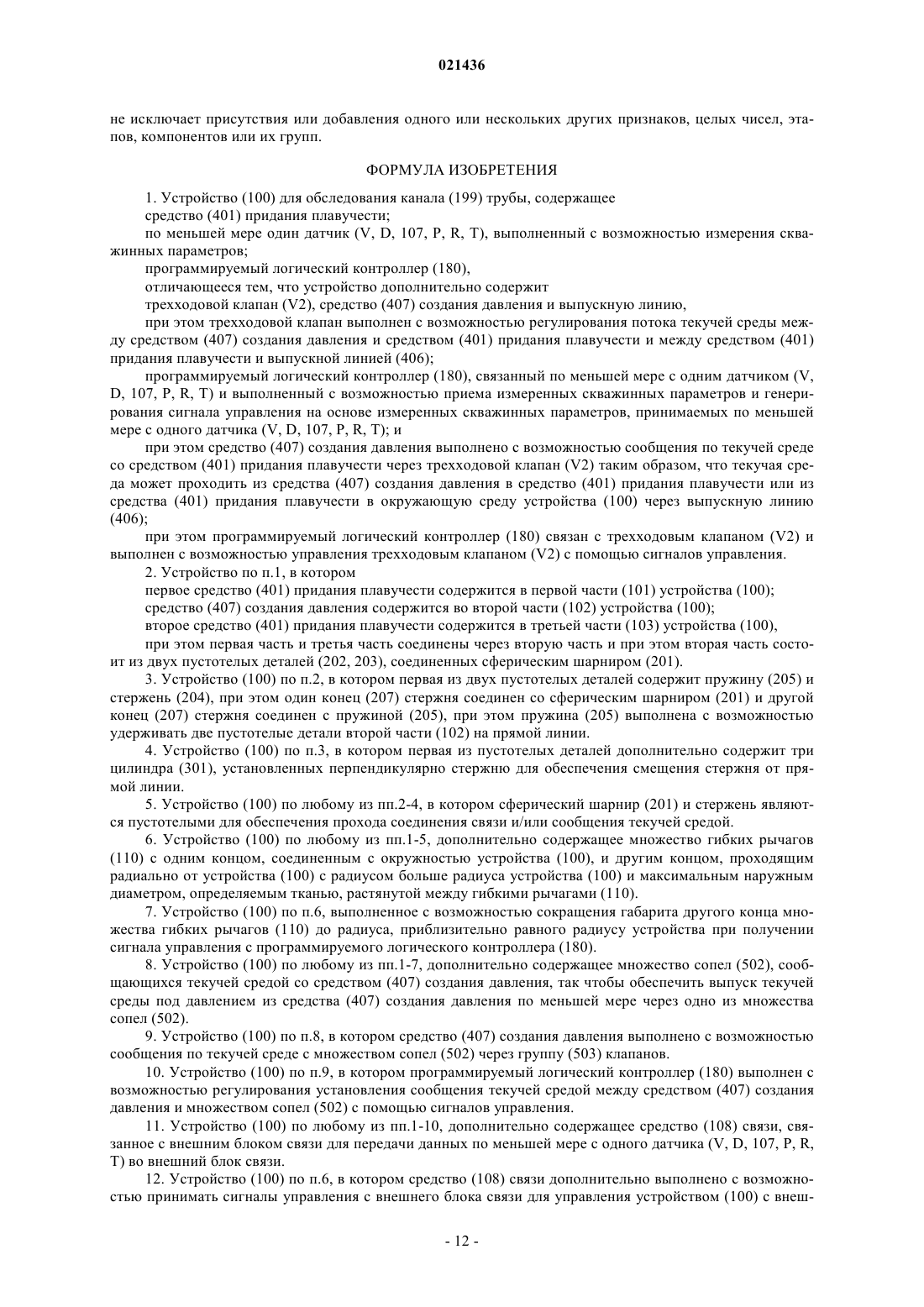
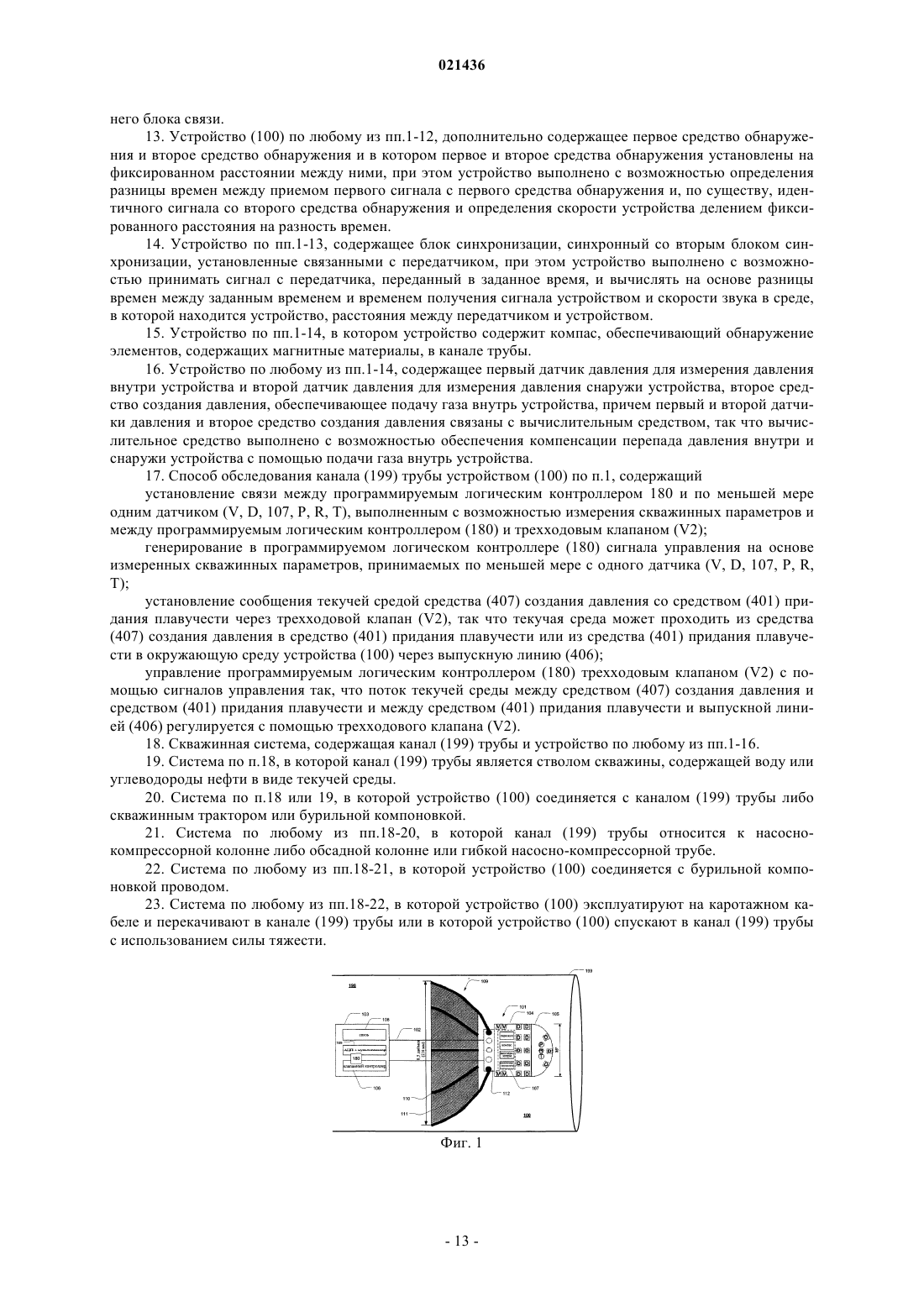
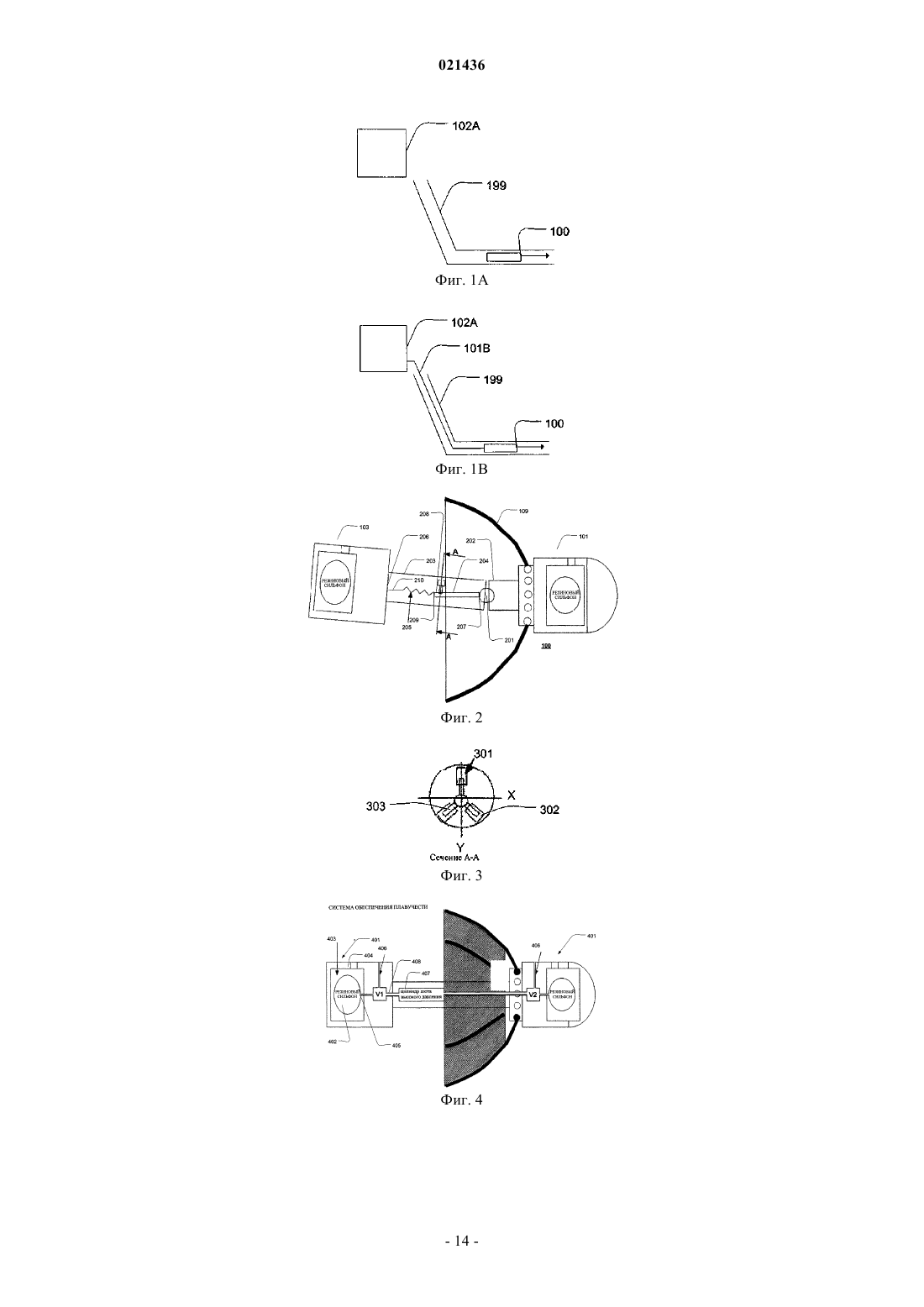
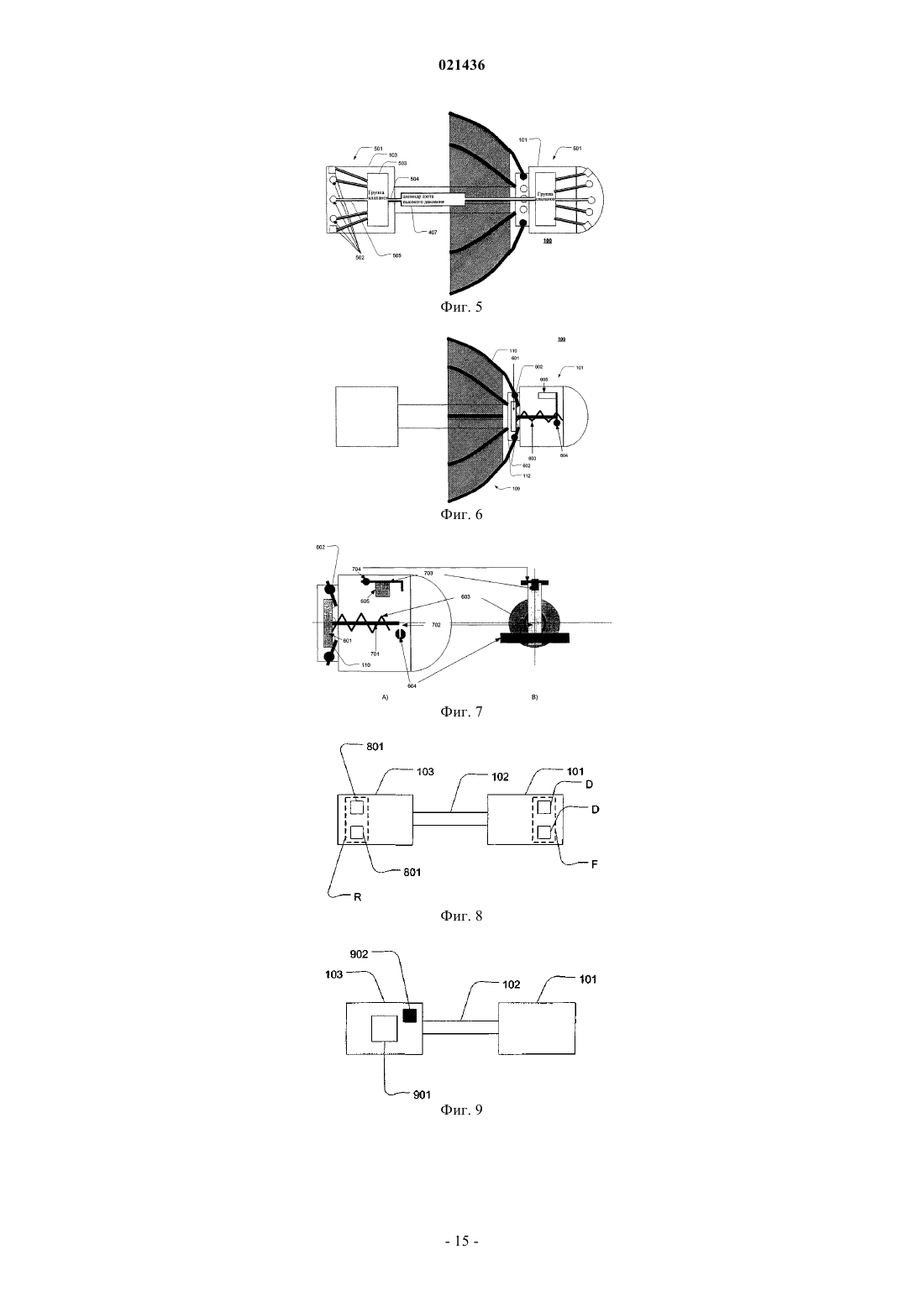
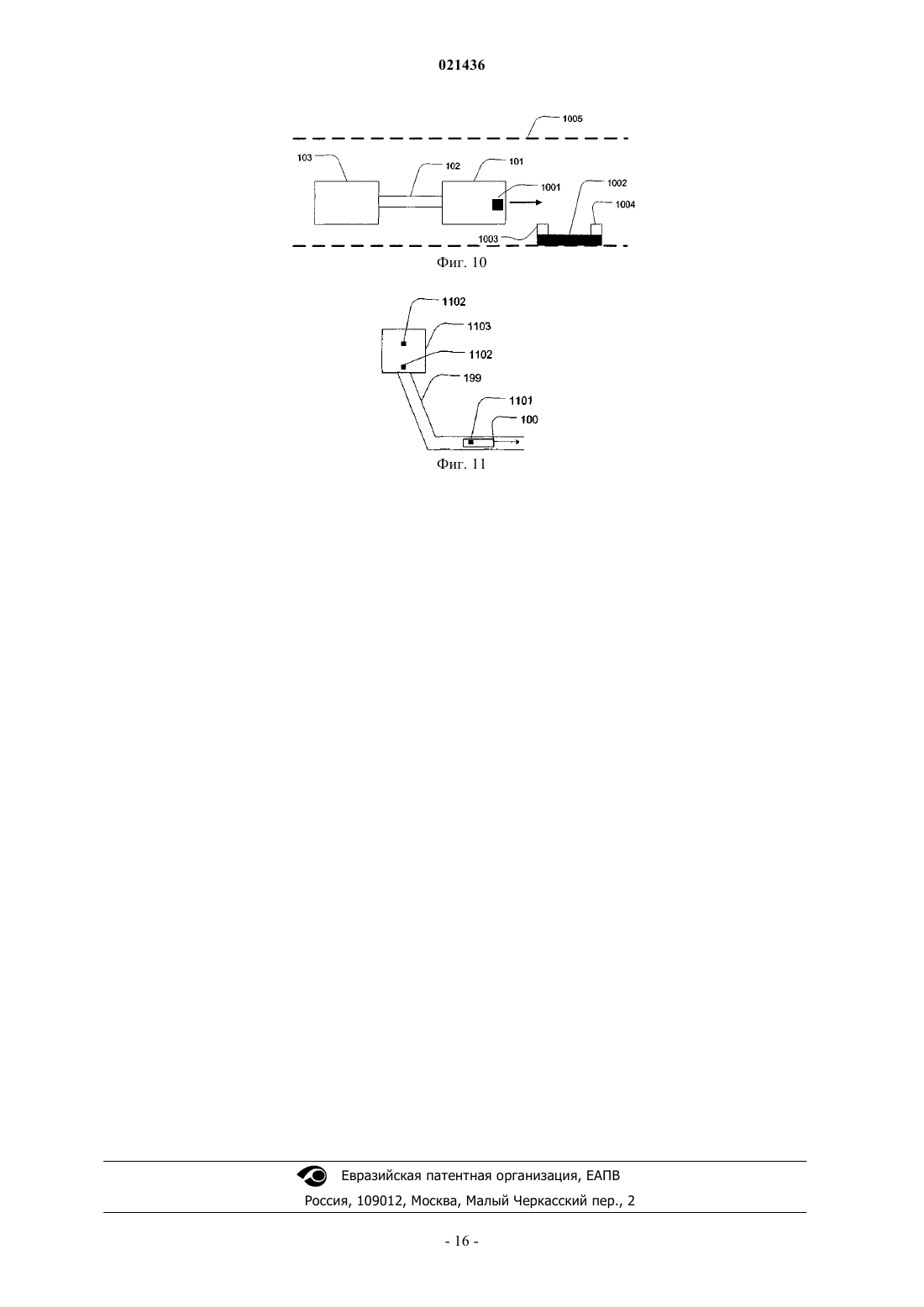
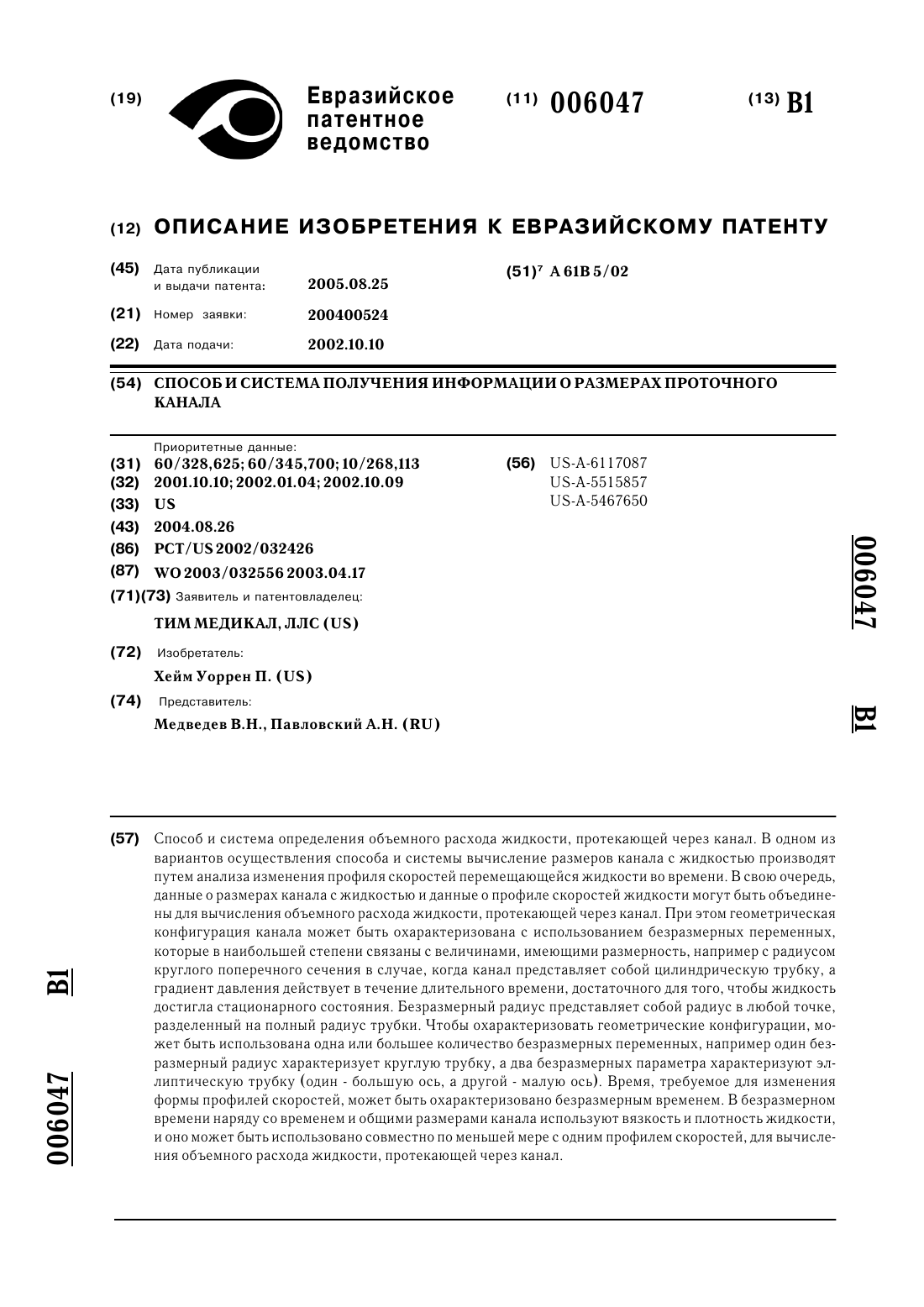
УСТРОЙСТВО, СИСТЕМА И СПОСОБ ОБСЛЕДОВАНИЯ КАНАЛА ТРУБЫ(71)(73) Заявитель и патентовладелец: МЕРСК ОЙЛ КАТАР А/С (DK) Изобретение относится к устройству для обследования канала трубы, содержащему трехходовой клапан, средство придания плавучести, средство создания давления, выпускную линию по меньшей мере с одним датчиком и вычислительное средство; при этом трехходовой клапан регулирует поток текучей среды между средством создания давления и средством придания плавучести и между средством придания плавучести и выпускной линией; вычислительное средство соединено связью по меньшей мере с одним датчиком и выполнено с возможностью генерирования сигналов управления на основе данных, принимаемых по меньшей мере с одного датчика; и при этом средство создания давления сообщается текучей средой со средством придания плавучести через трехходовой клапан, так что текучая среда может проходить из средства создания давления в средство придания плавучести или из средства придания плавучести в окружающую среду устройства через выпускную линию; и при этом вычислительное средство соединено связью с трехходовым клапаном и управляет трехходовым клапаном с помощью сигналов управления. При этом изобретение выполнено с возможностью обследования, например, нефтяных скважин,содержащих препятствия, такие как вымоины, и/или боковые отводы, и/или нелинейные части в заканчивании с необсаженным стволом скважины. Хейнен Вильхельмус Хубертус Паулус Мария (DE), Петерс Роберт Бауке Область техники Изобретение относится к устройству для обследования канала трубы. Изобретение дополнительно относится к соответствующему способу и системе. Предпосылки изобретения Для разведки и добычи углеводородов, содержащихся в нефти или газе, таких как парафины, нафтеновые углеводороды, ароматические углеводороды и углеводороды асфальтового ряда или газов, таких как метан, можно бурить скважины в пластах горных пород (или других) геологических пластах. После бурения ствола скважины в толще породы скважинную трубу можно вводить в скважину. Скважинную трубу, закрывающую часть толщи породы, предназначенной для добычи или нагнетания,называют эксплуатационной колонной-хвостовиком. Трубы, используемые для обеспечения герметичности и непроницаемости скважины в целом, называют обсадными колоннами. Трубы, подающие текучую среду в толщу породы или из нее, называют насосно-компрессорными колоннами. Наружный диаметр хвостовика меньше внутреннего диаметра ствола скважины на секции добычи или нагнетания скважины,в результате создается кольцевое пространство, или затрубное пространство, между хвостовиком и стволом скважины, состоящим из толщи породы. Данное кольцевое пространство можно заполнять цементом, предотвращающим переток вдоль обсадной колонны. Вместе с тем, если необходим вход текучих сред в скважину или их выход из скважины, должны быть выполнены небольшие отверстия, проходящие через стенку обсадной колонны и цемент в кольцевом пространстве, обеспечивающие сообщение с текучей средой и наличие гидравлической связи между толщей породы и скважиной. Отверстия называют перфорационными каналами. Данное конструктивное исполнение известно в нефтяной и газовой промышленности, как заканчивание скважины с обсаженным стволом. Альтернативно, можно обеспечивать доступ текучей среды в толщу породы и из нее с помощью так называемого заканчивания скважины с необсаженным стволом. Это означает, что скважина не имеет кольцевого пространства, заполненного цементом, но, при этом, имеет хвостовик, установленный в толще породы. Последнее конструктивное исполнение используют для предотвращения обрушения ствола скважины. Существует еще одно конструктивное исполнение, предполагающее отсутствие обрушения толщи породы со временем, здесь скважина не имеет обсадной колонны, закрывающей толщу породы,где получают текучие среды. При использовании в горизонтальных скважинах необсаженной секцией в коллекторе может являться пробуренная последняя часть скважины. Конструкции скважин, рассмотренные здесь, можно применять для строительства вертикальных, горизонтальных и/или наклоннонаправленных скважин. Для добычи углеводородов из нефтяных или газовых скважин можно использовать способ заводнения. При заводнении скважины можно бурить по сетке с чередованием нагнетательных и эксплуатационных скважин. Воду нагнетают в нагнетательные скважины, при этом нефть в зоне добычи вытесняется в смежные эксплуатационные скважины. Давление воды, требуемое для выталкивания нефти в эксплуатационные скважины, должно преодолевать потери на трение текучей среды в толще породы между нагнетательной и эксплуатационной скважиной и должно преодолевать давление коллектора минус гидростатическое давление нагнетаемой текучей среды. Давление воды, возможно в комбинации с низкой температурой воды, например порядка 5 С, может создавать трещины в породе пласта коллектора. Если трещина проходит от нагнетательной скважины до эксплуатационной скважины, она может образовывать канал, через который вода может проходить напрямую от нагнетательной скважины к эксплуатационной скважине, при этом без выталкивания нефти или газа впереди воды в нефтяную или газовую эксплуатационную скважину. Вода может также проходить через природные трещины в толще породы и при этом не выталкивать нефть в эксплуатационную скважину. Информацию о положении таких водоносных трещин можно получить в известной технике, спуская комплект петрофизических инструментов в скважину для определения местоположения воды. Это можно выполнять при заканчивании с необсаженным стволом или после цементирования хвостовика в необсаженном стволе. Вместе с тем, цементирование хвостовика при заканчивании с необсаженным стволом может быть связано с рядом технических проблем, например, таких как: 1) хвостовик может пройти в существующий боковой ствол или отвод разветвленной скважины; 2) цементирование хвостовика не может быть выполнено вследствие потерь на фильтрацию; 3) цементирование обуславливает создание соединения трещинами с другой скважиной. Спуск петрофизических инструментов в скважины, особенно горизонтальные скважины, ограничен глубиной, которую можно достичь средством спускоподъема, подходящим для конкретных размеров скважины. Таким образом, может быть предпочтительно получение возможности идентификации таких водоносных трещин без цементирования хвостовика при заканчивании с необсаженным стволом, не требующее спуска петрофизических каротажных инструментов в горизонтальные скважины с помощью обычных средств. В документе US 6241028 описан способ и система для получения данных измерений в напорном трубопроводе, транспортирующем текучую среду, таком как скважина для добычи нефти и/или газа. Система использует один или несколько миниатюрных датчиков, при этом оборудование датчиков заключено в предпочтительно сферическую оболочку. Вместе с тем, горизонтальные скважины не обязательно должны быть прямолинейными. Дополнительно скважины могут содержать препятствия, такие как вымоины и/или боковые стволы скважины,например, в разветвленных скважинах, которые могут препятствовать обследованию скважины в целом вышеуказанной системой. Таким образом, является предпочтительным создание возможности обследования скважин, содержащих препятствия, такие как вымоины и/или боковые стволы скважины и/или возможности обследования не прямолинейных горизонтальных скважин. Поэтому задачей изобретения является обеспечение обследования скважин, содержащих препятствия, такие как вымоины и/или боковые стволы скважины и/или не прямолинейные части скважин при заканчивании с необсаженным стволом. Сущность изобретения Задачу изобретения решают с помощью устройства для обследования канала трубы, причем устройство содержит трехходовой клапан, средство придания плавучести, средство создания давления, выпускную линию по меньшей мере с одним датчиком и вычислительное средство; при этом трехходовой клапан регулирует поток текучей среды между средством создания давления и средством придания плавучести и между средством придания плавучести и выпускной линией; вычислительное средство оснащено связью по меньшей мере с одним датчиком и выполнено с возможностью генерирования сигнала управления на основе данных, принимаемых по меньшей мере с одного датчика; и при этом средство создания давления сообщается текучей средой со средством придания плавучести через трехходовой клапан, так что текучая среда может проходить из средства создания давления в средство придания плавучести или из средства придания плавучести в окружающую среду устройства через выпускную линию; и при этом вычислительное средство оснащено связью с трехходовым клапаном и управляет трехходовым клапаном с помощью сигналов управления. При этом прихват устройства в вымоинах может предотвращаться, например, в нижней части канала трубы или в верхней части канала трубы, поскольку с помощью по меньшей мере одного датчика устройство способно обнаруживать вымоину и вычислять сигнал управления, указывающий количество текучей среды, которое трехходовой клапан должен пропустить в средство придания плавучести. При этом устройство способно подныривать под вымоину или всплывать для прохода над ней. Дополнительно может предотвращаться проход устройства в непредусмотренный канал трубы, например непредусмотренный боковой ствол или отвод в разветвленной скважине, с помощью вначале обнаружения бокового ствола перед устройством и затем соответствующего изменения плавучести устройства. Дополнительные варианты осуществления и преимущества изобретения раскрыты ниже в подробном описании изобретения и формуле изобретения. Краткое описание чертежей Изобретение описано более подробно ниже со ссылками на чертежи, на которых изображено следующее: на фиг. 1 показан вид сечения варианта осуществления устройства 100 для обследования канала трубы, содержащего первую, вторую и третью части; на фиг. 1 А показано устройство, перекачиваемое в канале трубы; на фиг. 1 В показано устройство, соединенное с внешним блоком связи; на фиг. 2 показана ловильная шейка устройства; на фиг. 3 показано сечение ловильной шейки устройства; на фиг. 4 показан вариант осуществления устройства 100 для обследования канала трубы, содержащего средство придания плавучести; на фиг. 5 показан вариант осуществления устройства 100 для обследования канала трубы, содержащего средство с реактивными соплами; на фиг. 6 показан вариант осуществления устройства 100 для обследования канала трубы, содержащего средство для складывания гибкого элемента; на фиг. 7 показана с увеличением первая часть варианта осуществления устройства; на фиг. 8 показан вариант осуществления устройства для обследования канала трубы, содержащего переднюю и заднюю группу средств обнаружения; на фиг. 9 показан вариант осуществления устройства для обследования канала трубы, содержащего второй цилиндр высокого давления; на фиг. 10 показан вариант осуществления устройства для обследования канала трубы, содержащего компас; на фиг. 11 показан вариант осуществления устройства для обследования канала трубы, содержащего блок синхронизации. Подробное описание изобретения На фиг. 1 показано сечение варианта осуществления устройства 100 для обследования канала 199 трубы, содержащего первую часть 101, вторую часть 102 и третью часть 103. Ниже и выше в описании канал трубы может служить примером для ствола скважины, трубы, заполненной текучей средой трубы и нефтяной трубы. Канал 199 трубы может содержать текучую среду. Выше и ниже в описании текучая среда в канале трубы может являться, например, водой, углеводородами, например углеводородами нефти или газообразными углеводородами соответственно, такими как парафины, нафтеновые углеводороды, ароматические углеводороды, углеводороды асфальтового ряда и/или метан или газы с более длинными цепями углеводорода, такими как бутан или пропан, или любые их смеси. В варианте осуществления, показанном на фиг. 1 А, устройство 100 можно, например, перекачивать в канале 199 трубы без какого-либо физического соединения/связи с наземным оборудованием/входом канала 199 трубы. В таком варианте осуществления устройство 100 может иметь питание от батарей или получать энергию из толщи породы и/или от текучих сред в скважине. Также водородные элементы или процессы сгорания можно использовать для энергопитания устройства. В варианте с батареями, последние можно активировать/заряжать благодаря разнице температур окружающей среды с помощью термопар и/или турбины, приводимой в действие перемещением текучей среды вокруг устройства 100, в свою очередь, приводящей в движение динамомашину, электрически соединенную с батареями. Внешний блок 102 А связи, такой как компьютер, связанный с акустическим модемом, установленным вблизи входа в канал 199 трубы, может осуществлять связь с устройством 100, например, через акустический модем. В альтернативном варианте осуществления, показанном на фиг. 1B, устройство 100 может соединяться, например, проводом 101 В с внешним блоком 102 А связи, таким как компьютер, установленным вблизи входа в канал 199 трубы. Внешний блок 102 А связи может обеспечивать электропитание устройства 100 по проводу, подавая энергию для перемещения устройства 100 в канале 199 трубы. Дополнительно или альтернативно, внешний блок 102 А связи может осуществлять связь с устройством 100 по проводу 101 В. Устройство 100 может содержать первую часть 101, вторую часть 102 и третью часть 103. Три части 101, 102 и 103 могут, например, быть выполнены литыми или отлитыми под давлением из пластикаили алюминия либо любого другого материала или их комбинации, подходящей для работы в условиях высокого давления, которое в скважинах высокого давления может доходить до 2000 бар (200 МПа) и температур в диапазоне, например, от 40 С на малых глубинах до 200 С и выше в варианте высокотемпературных скважин. Первая часть 101 может, например, содержать цилиндрическую часть 104 и полусферическую головную часть 105. Первая часть 101 может дополнительно содержать ряд датчиков. Например, первая часть может содержать ряд ультразвуковых датчиков V, например 4 ультразвуковых датчика, для определения относительной скорости текучей среды вокруг первой части 101. Ультразвуковой датчик может представлять собой измерительный преобразователь. Ультразвуковые датчики V могут содержаться в первой части 101, например в цилиндрической части 104. Ультразвуковые датчикиV могут передавать данные, представляющие скорость текучей среды. Кроме того, первая часть 101 может, например, включать в себя ряд ультразвуковых датчиков D расстояния, например 13 ультразвуковых датчиков расстояния. Ряд ультразвуковых датчиков расстояния могут передавать данные, представляющие расстояние, например, до окружающего канала 199 трубы. Ультразвуковые датчики расстояния могут содержаться в первой части 101. Например, 10 ультразвуковых датчиков расстояния могут содержаться в цилиндрической части 104 первой части 101, например в окружности цилиндрической части 104, и при этом передавать данные, представляющие расстояние между цилиндрической частью 104 и окружающим каналом 199 трубы, и 3 ультразвуковых датчика расстояния могут содержаться в полусферической головной части 105, например впереди полусферической головной части 105, и передавать данные, представляющие расстояние между полусферической головной частью и, например, потенциальными препятствиями, такими как обрушения/вымоины стенок ствола перед устройством 100. Ультразвуковые датчики и ультразвуковые датчики расстояния первой части могут проводить зондирование текучей среды, окружающей устройство 100 и канал 199 трубы, например, через стеклянные окна, так что датчики защищены от потока текучей среды в канале 199 трубы. Первая часть может дополнительно содержать датчик Р давления. Датчик Р давления может содержаться в полусферической головной части 105. Датчик Р давления может передавать данные, представляющие давление текучей среды, окружающей устройство 100. Дополнительно первая часть может содержать омметр R для измерения электрического удельного сопротивления текучей среды, окружающей устройство 100. Омметр может содержаться в полусферической головной части 105. Омметр может передавать данные, представляющие электрическое удельное сопротивление текучей среды, окружающей устройство 100. Дополнительно первая часть может содержать датчик Т температуры для измерения температуры текучей среды, окружающей устройство 100. Датчик Т температуры может содержаться в полусферической головной части 105. Датчик Т температуры может передавать данные, представляющие температуру текучей среды, окружающей устройство 100. Первая часть может дополнительно содержать блок 107 определения местоположения, передающий данные, представляющие местоположение первой части 101, и таким образом обеспечивающий привязку места передачи данных от указанных выше датчиков. Привязку места передачи данных можно, например, выполнять относительно входа канала 199 трубы. В варианте осуществления блок 107 определения местоположения может содержать гироскопы Gyro и компас Compass, акселерометры G-forces и наклономер (инклинометр) Tilt meter. Устройство 100 может дополнительно содержать программируемый логический контроллер (ПЛК) 180, например, содержащийся в первой части 101 или в третьей части 103. Один или несколько описанных выше датчиков, т.е. ультразвуковые датчики V, ультразвуковые датчики D расстояния, датчик Р давления, омметр R, датчик Т температуры и блок 107 определения местоположения, могут соединяться с ПЛК, например, проводом и через аналого-цифровой преобразователь (АЦП) и мультиплексор 109. Например, ПЛК может соединяться соответствующими проводами и через аналого-цифровой преобразователь (АЦП) и мультиплексор 109 с ультразвуковыми датчиками V, ультразвуковыми датчиками D расстояния и блоком 107 определения местоположения. По ряду введенных данных от датчиков ПЛК способен определять окружающие условия и местоположение устройства 100 и вычислять управляющий сигнал, представляющий действия управления устройством 100. Таким образом, ПЛК 180 может определять проводку через канал 199 трубы с помощью одного или нескольких механизмов управления направлением перемещения, описанных ниже и показанных на фиг. 2-5. Например, ПЛК 180 может соединяться связью, например, по электрическим проводам с каждым из механизмов управления направлением перемещения, и ПЛК 180 может управлять механизмами управления направлением перемещения с помощью сигналов управления. Вторая часть 102 может содержать двухсекционный стержень ("ловильную шейку") 202 и 203, соединенный с помощью сферического шарнира 201, показанный на фиг. 2. Двухсекционный стержень 202, 203 может иметь цилиндрическое сечение и может быть пустотелым. Дополнительно двухсекционный стержень 202, 203 может соединять первую часть 101 с третьей частью 103 с помощью сферического шарнира 201. Как показано на чертеже, первая часть 202 двухсекционного стержня 202, 203 может соединяться с первой частью 101 устройства 100 и вторая часть 203 двухсекционного стержня 202, 203 может соединяться с третьей частью 103 устройства 100. Одна из частей двухсекционного стержня, например вторая часть 203, может содержать стержень 204, физически соединенный на одном конце 207 со сферическим шарниром 201, например, клеевым,сварным соединением или т.п. Другой конец 208 стержня может соединяться с первым концом 209 пружины 205. Другой конец 210 пружины 205 может физически соединяться со стороной 206 второй части 102 устройства 100, например, стороной, также соединяющейся со второй частью 203 двухсекционного стержня. Сила, передаваемая пружиной на сторону 206 и другой конец 208 стержня 204, имеет такую величину, что удерживает устройство 100, т.е. первую часть 202 и вторую часть 203 двухсекционного стержня, на прямой линии (например, под углом 1801 между первой частью и второй частью двухсекционного стержня) с помощью сферического шарнира 201, когда ни один из цилиндров, описанных ниже, не приведен в действие. Сечение по линии А-А фиг. 2 показано на фиг. 3. На фиг. 3 показаны три цилиндра 301. Цилиндры 301 могут, например, являться гидравлическими или механическими или комбинацией гидравлических и механических цилиндров (например, первый цилиндр может быть механическим, а второй и третий цилиндры могут быть гидравлическими). Каждый цилиндр может содержать камеру 302 цилиндра и поршень 303. Камера 302 цилиндра может соединяться с внутренней поверхностью стенки второй части 203 двухсекционного стержня. Соединение может быть выполнено, например, сварным или болтовым либо на клею или т.п. Поршни 303 могут соединяться с другим концом стержня 208, например, сваркой, на клею, болтами или т.п. Камеры 302 цилиндров 301 могут, например, быть установлены разведенными на углы 120 по внутренней окружности стенки второй части 203 двухсекционного стержня. Для управления направлением перемещения устройства 100 один или несколько цилиндров можно приводить в действие для смещения стержня 204 из положения равновесия, установленного пружиной 205. Цилиндры 301 могут быть выполнены с возможностью смещения стержня 204 в любое положение. На фиг. 3, например, верхний цилиндр 301 приведен в действие и сместил стержень 204 от его установленного пружиной положения равновесия на пересечении двух линий X и Y. При этом прямая линия между первой частью 202 и второй частью 203 двухсекционного стержня изменена на ломаную линию с образованием, например, угла 1351, при этом продольная ось устройства 100 повернута вокруг сферического шарнира 201. Если три цилиндра являются гидравлическими, то пружину 205 можно заменить пружинами в цилиндрах, так что когда цилиндры не приведены в действие, упругие силы пружин в цилиндрах имеют такую величину, что удерживают устройство 100, т.е. первую часть 202 и вторую часть 203 двухсекционного стержня, на прямой линии. Пружины установлены в цилиндрах, толкающими поршни, например между поршнями 303 и стержнем 204. В варианте осуществления пружины между поршнями 303 и стержнем 204 могут являться толкающими пружинами. Стержень 204 и сферический шарнир 201 могут быть пустотелыми, например, для обеспечения прохода электропровода из первой части 101 в третью часть 103 через двухсекционный стержень и сферический шарнир 201 и стержень 204. Дополнительно стержень 204 и сферический шарнир 201 могут обеспечивать проход трубки, например трубки высокого давления. Таким образом, направлением перемещения устройства 100 можно управлять с помощью управления цилиндрами 301 и при этом ловильной шейкой устройства 100. В варианте осуществления данные с одного или нескольких датчиков в первой части 101 можно передавать в третью часть 103 по электрическому проводу, проходящему из первой части 101 в третью часть 103 через сферический шарнир 201 и стержень 204. В варианте осуществления цилиндр 407 высокого давления фиг. 4 может сообщаться текучей средой с тремя гидравлическими цилиндрами фиг. 2, например через трубки высокого давления и соответствующие клапаны и штуцера (для создания большей точности подачи текучей среды с сокращением объемного расхода в единицу времени). При этом три гидравлических цилиндра 301 могут приводиться в действие от цилиндра 407 высокого давления. Количество второй текучей среды, передаваемой от цилиндра 407 высокого давления в цилиндры 301, может регулировать ПЛК 180, с помощью сигналов управления, управляя клапанами. Вторую текучую среду, содержащуюся в цилиндре 407 высокого давления, можно выбрать из группы текучих сред, известных своим расширением при падении давления. Наиболее эффективные текучие среды поэтому являются газообразными. Например, азот, или гелий, или углеводородный газ, или СО 2 можно использовать в качестве второй текучей среды, заполняющей цилиндр 407. В альтернативном варианте осуществления три цилиндра могут являться механическими цилиндрами, управляемыми и приводимыми в действие двигателями с питанием, например, от батарей или любого другого альтернативного источника энергии. Альтернативно, в варианте осуществления, где устройство соединяется проводом с внешним блоком 102 А связи, установленным вблизи входа, подающим мощность на устройство 100 по проводу, три цилиндра могут получать питание по проводу. Третья часть 103 устройства 100 может содержать средство 108 связи, такое как акустический модем, обеспечивающее связь между устройством 100 и поверхностью, например внешний блок 102 А связи, установленный вблизи входа в канал 199 трубы. Например, устройство 100 может передавать данные с одного или нескольких датчиков во внешний блок 102 А связи через средство 108 связи. В варианте осуществления можно использовать ретрансляторы в соединении с акустическим модемом. Ретранслятор может принимать сигнал от акустического модема устройства 100 (или от другого ретранслятора) и усиливать принятый сигнал до его исходной мощности. При этом расстояние, на котором может работать связь устройства с внешним блоком 102 А связи, может увеличиваться. Ретрансляторы можно, например, перекачивать в канале 199 трубы, например, когда/если мощность сигнала, принятого от средства 108 связи устройства 100 падает ниже порогового значения, например 10 дБм. Альтернативно или дополнительно, средство 108 связи может содержать некоторое количество меток радиочастотной идентификации (RFID), например 100 меток RFID. Метки RFID можно выпускать из устройства 100 с равными интервалами времени, например одну метку RFID каждые 2 мин, и перед выпуском в метку RFID должны быть введены данные, записанные датчиками на месте ее выпуска. Когда устройство 100 уже прошло требуемое расстояние, например до конца канала 199 трубы, метки RFID могут быть вынесены вверх и извлечены на входе канала 199 трубы, например на площадке скважины,во время добычи текучей среды. На площадке скважины можно считывать данные меток RFID. Другие микрочипы, которые могут содержать данные, такие как компоненты запоминающего устройства во флеш-карте, можно также использовать. Для получения данных требуется эксплуатирующаяся скважина для доставки на поверхность меток RFID или других запоминающих устройств, таких как микросхемы памяти. В варианте осуществления метки RFID могут содержаться в устройстве 100, например, в третьей части 103 и метки RFID можно выпустить из устройства 100, например, через трубку в заднем конце третьей части 103, т.е. конце, обращенном от второй части 102. С помощью регулируемой детонации, выполняемой средством детонации, сообщающимся текучей средой с трубкой, метку RFID можно выпускать с некоторыми интервалами, регулируемыми ПЛК 180. Например, ПЛК 180 может управлять средством детонации. В варианте осуществления средство 108 связи может дополнительно быть выполнено с возможностью приема акустических сигналов от входа в канал трубы, при этом с обеспечением двусторонней связи между внешним средством 102 А связи, содержащим акустический модем, и установленным вблизи входа в канал 199 трубы, и устройством 100. При этом устройство 100 может, например, принимать дан-5 021436 ные управления из внешнего блока 102 А связи с помощью средства 108 связи. Третья часть может дополнительно содержать клапанный контроллер 106 для управления несколькими клапанами, как описано ниже. Дополнительно, третья часть 103 может содержать аналого-цифровой преобразователь (АЦП) и мультиплексор 109. АДЦ и мультиплексор могут принимать аналоговые данные, например, с одного или нескольких датчиков в первой части 101 по электрическому проводу и преобразовывать аналоговые данные в цифровые данные, которые, например, можно передавать на площадку скважины с помощью средства 108 связи и/или по проводу 101 В, и/или данные может обрабатывать ПЛК 180. Устройство 100 может дополнительно содержать гибкий элемент 109. Например, гибкий элемент может содержать рычаги 110, выполненные из титана, и тканевую деталь 111, выполненную из арамидных волокон. Гибкий элемент 109 может иметь полусферическую форму, показанную на фиг. 1, и устройство 100 может, например, быть выполнено с возможностью поджатия полусферической формы к максимальному наружному диаметру между, например, 3,5 дюйма (88,9 мм) и 8,5 дюймов (215,9 мм). Наружный диаметр ограничен тем, что гибкий элемент не можетрасширяться больше упомянутых 8,5 дюймов, поскольку гибкий элемент уже достигает максимального наружного диаметра. В канале трубы с внутренним диаметром меньше 8,5 дюймов наружный диаметр гибкого элемента можно установить по внутреннему диаметру канала трубы. При этом устройство выполнено с возможностью спуска через насосно-компрессорную колонну и,таким образом, верхнее оборудование заканчивания скважины не должны снимать (извлекать) для спуска устройства в скважину. Гибкий элемент 109 можно, например, прикреплять к первой части 101. Например, первая часть 101 может содержать цилиндрическую крепежную часть 112, к которой гибкий элемент 109 можно прикреплять, например, сварными соединениями или на шаровой опоре. Проекция гибкого элемента на вторую часть 102 может изменяться и может зависеть от наружного диаметра полусферической формы. Если,например, гибкий элемент 109 полностью раздвинут (максимальный наружный диаметр), то проекция гибкого элемента 109 на вторую часть 102 (т.е. продольную ось устройства 100) является минимальной. Если, например гибкий элемент 109 полностью сложен (минимальный наружный диаметр), то проекция гибкого элемента 109 на вторую часть 102 является максимальной. Альтернативно или дополнительно,проекцию гибкого элемента 109 на вторую часть 102 можно изменять, изменяя угол установки гибкого элемента. Изменение угла установки гибкого элемента должно обуславливать неуравновешенную силу проталкивания гибкого элемента относительно оси устройства, при этом устройство должно перемещаться от оси. Гибкий элемент 109 можно, например, использовать для перемещения устройства 100 в канале 199 трубы. С помощью приложения давления со стороны входа 198 канала 199 трубы можно расширять гибкий элемент 109 до его максимального диаметра, при этом устройство 100 может перемещаться в канале 199 трубы. Если, например, устройство 100 встречает обвал стенок скважины (или вымоину) на своем пути, устройство 100 может изменять максимальный наружный диаметр гибкого элемента для обеспечения прохода устройства 100 через зону обвала, приспосабливая наружный диаметр устройства 100 к диаметру зоны обвала. На фиг. 4 показан вариант осуществления устройства 100 для обследования канала трубы, содержащего средство 401 придания плавучести. Устройство 100 фиг. 4 может содержать технические признаки, описанные выше и показанные на фиг. 1, и/или 2, и/или 3. Дополнительно, устройство фиг. 4 может содержать средство 401 придания плавучести (например,емкости придания плавучести или гидропоры) в первой части 101 и в третьей части 103. Каждое из средств 401 придания плавучести может содержать резиновый сильфон 402, содержащийся в титановом цилиндре 403. Титановые цилиндры 403 предотвращают взрыв резинового сильфона 402. Титановые цилиндры 403 дополнительно содержат впуск/выпуск 404, обеспечивающий вход текучей среды в канал 199 трубы или выход из него. Впуск/выпуск 404 титановых цилиндров может быть закрыт проницаемой металлической мембраной. Первая часть 101 и третья часть 103 могут, каждая, дополнительно содержать трехходовой клапанV1, V2. Трехходовой клапан V1, V2 может сообщаться текучей средой с соответствующим резиновым сильфоном 402, например, через соответствующие трубки 405. Дополнительно трехходовые клапаны V1,V2 могут сообщаться текучей средой с каналом трубы через соответствующие выпускные линии 406. Дополнительно каждый из трехходовых клапанов V1, V2 может сообщаться текучей средой с цилиндром 407 высокого давления, например, расположенным во второй части 102 устройства 100, через соответствующие трубки 408. Цилиндр 407 высокого давления может содержать вторую текучую среду. Трехходовыми клапанами V1, V2 может управлять клапанный контроллер 106, который может соединяться связью с трехходовыми клапанами V1, V2, например, по электрическому проводу. Клапанный контроллер 106 может, например, принимать сигналы управления от ПЛК, передающего команды клапанному контроллеру 106 на увеличение и/или уменьшение плавучести средства 401 придания плавучести согласно результатам вычислений, полученным с помощью ПЛК. ПЛК может соединяться связью с клапанным контроллером 106, например, по электрическому проводу. С использованием цилиндра 407 высокого давления и трехходовых клапанов 406 и средства 401 придания плавучести устройство 100 способно регулировать свою плавучесть. Например, в случае, если резиновые сильфоны 402 заполнены второй текучей средой, например N2,и плавучесть должны уменьшить, т.е. устройство 100 должно погрузиться, то открывается трехходовой клапан V1, V2 между резиновым сильфоном 402 и линией 406 выпуска N2, при этом текучая среда из канала 199 трубы может входить в титановый цилиндр 403 через проницаемую металлическую мембрану 404 и одновременно вторая текучая среда может выходить из резинового сильфона 402 через линию 406 выпуска N2 вследствие давления, передаваемого упругим резиновым сильфоном 402 второй текучей среде. Когда плавучесть устройства уменьшена достаточно, например, как определяют один или несколько датчиков и ПЛК 108, трехходовой клапан 406 устанавливается в закрытое положение с получением сигнала управления из ПЛК 180. Следовательно, если плавучесть устройства 100 должна быть увеличена, т.е. устройство 100 должно подняться, то трехходовой клапан V1, V2 между резиновым сильфоном 402 и цилиндром 407 высокого давления открывается, при этом вторая текучая среда цилиндра 407 высокого давления, например N2,сжимается в резиновом сильфоне 402. При этом резиновый сильфон 402 расширяется и при этом вытесняет текучую среду, например текучую среду из канала трубы, присутствующую в титановом цилиндре 403, через проницаемую металлическую мембрану 404. Когда плавучесть устройства увеличивается достаточно, например, как определяют один или несколько датчиков и ПЛК 108, трехходовой клапан 406 устанавливается в закрытое положение с получением сигнала управления из ПЛК 180. В варианте осуществления крыльчатка/импеллер может быть прикреплена к проницаемой металлической мембране 404 или установлена внутри проницаемой металлической мембраны так, что крыльчатка вращается, когда текучая среда из канала 199 трубы проходит через проницаемую металлическую мембрану 404. При этом крыльчатка выполнена с возможностью работы как динамомашина, и если устройство 100 имеет питание от батарей, крыльчатка может быть электрически соединена, например, электрическим проводом с батареями устройства 100 и при этом батареи могут заряжаться с помощью крыльчатки. В варианте осуществления трехходовые клапаны V1, V2 могут быть оборудованы дросселем потока для ограничения объемного расхода в единицу времени для обеспечения, при этом, некоторой точности работы трехходовых клапанов. Таким образом, устройство 100 может иметь управление направлением перемещения с помощью управления его плавучестью с использованием цилиндра 407 высокого давления, трехходового клапанаV1, V2 и средства 401 придания плавучести. Плавучесть устройства 100 может регулировать ПЛК 180 с получением данных с датчиков и передачи сигналов управления на трехходовые клапаны V1, V2. Альтернативно, плавучесть устройства 100 можно регулировать с помощью внешнего блока 102 А связи, получая данные с датчиков и передавая сигналы управления на трехходовые клапаны V1, V2. В варианте осуществления средство 401 придания плавучести можно использовать, например, для управления направлением перемещения первой части 101 вверх или вниз относительно сферического шарнира 201, например, увеличивая плавучесть средства 401, придания плавучести в первой части 101,например, перекачиванием второй текучей среды из цилиндра 407 высокого давления, например N2, в резиновый сильфон 402 первой части 101, при этом с вытеснением текучей среды из титанового цилиндра 403 в канал трубы, и/или уменьшая плавучесть средством 401 придания плавучести в третьей части 103, например, с помощью вытеснения второй текучей среды из резинового сильфона 402 текучей средой из канала 199 трубы в титановом цилиндре 403 третьей части 103, как описано выше. На фиг. 5 показан вариант осуществления устройства 100 для обследования канала трубы, содержащего средство с реактивными соплами. Устройство 100 фиг. 5 может содержать технические элементы, описанные выше и показанные на фиг. 1, и/или, 2, и/или 3, и/или 4. Дополнительно устройство фиг. 5 может содержать средство 501 с реактивными соплами в первой части 101 и в третьей части 103. Каждое из средств 501 с реактивными соплами может содержать ряд сопел 502, например 5 сопел,через которые можно создавать реактивный напор струей второй текучей среды. Дополнительно средство 501 с реактивными соплами может содержать группу 503 клапанов. Группа 503 клапанов может сообщаться текучей средой с цилиндром 407 высокого давления, например, через соответствующие трубки 504 высокого давления. Дополнительно группа 503 клапанов может сообщаться текучей средой с каждым из сопел через соответствующие трубки 505 высокого давления. Сопла 502 могут быть установлены сзади третьей части 103 и спереди первой части 101, как показано на фиг. 5. Дополнительно сопла могут сообщаться с текучей средой в канале 199 трубы, при этом обеспечивается выпуск каждым соплом второй текучей среды, например текучей среды высокого давления из цилиндра 407 высокого давления, когда данное обеспечивает группа 502 клапанов. Группа 503 клапанов может соединяться связью с ПЛК 180, например, электрическими проводами, так что группой 503 клапанов может управлять ПЛК 180, например, на основе обработанных ПЛК 180 данных с датчиков. Если, например, устройство 100 должно перемещаться прямо вперед, в группе 501 клапанов может открываться клапан между цилиндром 407 высокого давления и центральным соплом 502 в группе 503 клапанов третьей части 103, при этом устанавливается сообщение текучей средой между цилиндром 407 высокого давления и центральным соплом 502. Таким образом, вторая текучая среда может выходить с созданием тяги из цилиндра 407 высокого давления через центральное сопло 502 прямо назад в текучей среде канала 199 трубы. При этом устройство 100 должно перемещаться в направлении, противоположном напору второй текучей среды по закону сохранения количества движения, т.е. прямо вперед. Если, например, устройство 100 должно перемещаться назад и вниз, в группе клапанов 501 может открываться клапан между цилиндром 407 высокого давления и верхним соплом 502 в первой части 101,при этом устанавливается сообщение текучей средой между цилиндром 407 высокого давления и верхним соплом 502. Таким образом, вторая текучая среда может создавать напор от цилиндра 407 высокого давления через верхнее сопло 502 вверх и вперед в текучей среде канала 199 трубы. При этом устройство 100 должно перемещаться в направлении, противоположном напору второй текучей среды по закону сохранения количества движения, т.е. вниз и назад. Таким образом, устройство 100 может иметь управление направлением перемещения с использованием сопел 502, группы 501 клапанов и цилиндра 407 высокого давления. Выпуском второй текучей среды из сопел устройства 100 может управлять ПЛК 180, получая данные с датчиков и передавая сигналы управления на группу 503 клапанов, управляющей клапаном, сообщающимся текучей средой с соплом(соплами), из которого должна выпускаться вторая текучая среда. Альтернативно, выпуском второй текучей среды из сопел устройства 100 может управлять внешний блок 102 А связи, получая данные с датчиков и передавая сигналы управления в группу 503 клапанов. На фиг. 6 показан вариант осуществления устройства 100 для обследования канала трубы, содержащего средство сокращения гибкого элемента. Устройство 100 фиг. 6 может содержать технические признаки, описанные выше и показанные на фиг. 1, и/или 2, и/или 3, и/или 4, и/или 5. Дополнительно устройство 100, показанное на фиг. 6, может в первой части 101 содержать диск 601, например, установленный в цилиндрической крепежной части 112, с данным диском 601 рычаги 110 гибкого элемента 109 могут иметь физический контакт. Дополнительно рычаги 110 могут прикрепляться к цилиндрической крепежной части 112 шаровой опорой 602 или т.п., обеспечивающей вращение гибкого рычага 110 на шаровой опоре 602. При этом при поступательном перемещении диска 601 вправо на фиг. 6 рычаги 110 могут складываться и при поступательном перемещении диска 601 влево на фиг. 6 рычаги могут раздвигаться, например, под действием давления текучей среды в канале 199 трубы. Дополнительно первая часть 101 может содержать пружину 603, второй вращающийся стержень 604 и электромагнит 605, дополнительно описанные ниже и показанные на фиг. 7. На фиг. 7 показана с увеличением первая часть 101 устройства 100 фиг. 6. На фиг. 7 А) показан вид сбоку первой части 101 и на фиг. 7 В) показан вид спереди. Первая часть содержит шаровые опоры 602,рычаги 110, диск 601, электромагнит 605, пружину 603 и второй вращающийся стержень 604. Дополнительно первая часть содержит штифт 701, прикрепленный одним концом к диску 601. Штифт дополнительно соединяется с пружиной 603, которая может являться пружиной, работающей на растяжение. Пружина 603 тянет штифт 701, прикрепленный к диску 601 вправо на фиг. 7. При этом другой конец штифта 701 толкает пластину 702. Пластина 702 удерживается на месте на одном конце второй пластиной 703 и на другом конце вращающимся стержнем 604. Вторая пластина 703 удерживается на месте электромагнитом 605 и одним концом на первом вращающемся стержне 704, и другой конец удерживает первый конец плиты 702. Таким образом, когда питание электромагнита 605 выключают, электромагнит 605 высвобождает вторую пластину 703, которая поворачивается вокруг первого вращающегося стержня 704. При этом первый конец плиты 702 высвобождается и пластина 702 поворачивается вокруг второго вращающегося стержня 604, обеспечивая перемещение штифта 701 вправо на фиг. 7, при этом диск 601 перемещается вправо, таким образом передавая силу на рычаги 110. При этом рычаги 110 и, следовательно, также ткань 111 складываются. При описанном выше конструктивном исполнении требуется небольшое усилие для удержания штифта 701 в нужном положении, например порядка 1/2 Н. Устройство 100, выполненное с возможностью уменьшения наружного диаметра с помощью гибкого элемента 109, может регулировать свой наружный диаметр согласно препятствиям в канале 199 трубы. Дополнительно, если устройство 100 прихватывается в канале 199 трубы, например, вследствие вымывания или т.п., устройство может сложить гибкий элемент 109 с помощью средства сокращения гибкого элемента, описанного выше и показанного на фиг. 6 и 7. В варианте осуществления ПЛК 180 может соединяться связью с электромагнитом 605. Передавая сигналы управления на электромагнит 605, ПЛК 180 может управлять электромагнитом 605, например, в случае, когда скорость устройства 100 равна нулю м/с в течение заданного периода времени, например 1 мин. Приняв сигнал управления, электромагнит может отключаться, при этом гибкий элемент складывается, как описано выше. В варианте осуществления электромагнит 605 может быть заменен растворимым кислотой элементом и штифт 701 может высвобождаться с созданием контакта между растворимым кислотой элементом 605 и пластиной 703. При этом пластина 703 может быть разъедена насквозь, при этом первый конец плиты 702 высвобождается и пластина 702 поворачивается вокруг второго вращающегося стержня 604,-8 021436 обеспечивая перемещение штифта 701 вправо на фиг. 7, при этом диск 601 перемещается вправо, при этом передавая усилие на рычаги 110. При этом рычаги 110 и, следовательно, также ткань 111 складываются. В варианте осуществления устройство 100 может содержать механический рычаг, который можно использовать для отталкивания устройства 100 от стенки канала 199 трубы в направлении, противоположном тому, в котором устройство 100 стремится перемещаться. Например, устройство 100 может направляться к стенке канала 199 трубы. Ультразвуковые датчики расстояния передают данные в ПЛК, определяющий, что для предотвращения контакта со стенкой верхнее переднее сопло должно выпустить вторую текучую среду. Следовательно, ПЛК 180 передает сигнал управления, указывающий насколько и/или на какое время открыть клапан группе 503 клапанов, управляющей работой верхнего переднего сопла. Когда группа 503 клапанов принимает сигнал управления,клапан, устанавливающий сообщение текучей среды с верхним передним соплом, открывается, и реактивная струя второй текучей среды выпускается из сопла. Дополнительно в качестве примера устройство 100 может направляться к боковому стволу разветвленной скважины. Ультразвуковые датчики расстояния передают данные в ПЛК, определяющий, что для предотвращения входа в боковой ствол разветвленной скважины плавучесть устройства 100 должна быть увеличена. Следовательно, ПЛК 180 передает сигнал управления, указывающий насколько и/или на какое время открыть клапаны V1, V2, управляющие сообщением текучей средой между резиновыми сильфонами 402 и цилиндром 407 высокого давления. Когда клапаны V1, V2 принимают сигнал управления,клапаны открываются согласно сигналу управления, и вторая текучая среда из цилиндра 407 высокого давления входит в резиновые сильфоны 402, при этом увеличивая плавучесть устройства 100. В варианте осуществления устройство 100 можно перекачивать с помощью гибкого элемента 109,описанного выше, в некотором отрезке длины канала 199 трубы, например в обсаженном участке канала 199 трубы, и из него, т.е. в законченную с необсаженным стволом часть скважины, устройство может перемещаться самостоятельно с помощью сопел 502, как описано выше. В варианте осуществления устройство 100 может спускаться на некоторую глубину в канале 199 трубы с использованием силы тяжести, например, пока угол между каналом 199 трубы и вертикалью не превысит 60, когда силы тяжести в большинстве случаев недостаточно для преодоления трения между текучей средой и устройством 100. От данной точки устройство 100 может перемещаться самостоятельно с помощью одного или нескольких описанных выше средств, например средств 501 с реактивными соплами и/или гибкого элемента 109. В варианте осуществления устройство 100 может соединяться со скважинным трактором, который может перемещаться по каналу 199 трубы, например, к зоне, представляющей интерес для пользователя устройства 100, и затем устройство 100 можно освобождать от скважинного трактора для самостоятельного перемещения с помощью одного или нескольких описанных выше средств, например средства 501 с реактивными соплами и/или гибкого элемента 109. В варианте осуществления устройство 100 может соединяться проводом с бурильной компоновкой. Бурильная компоновка может быть установлена вблизи внешнего блока 102 А связи (например, содержать внешний блок 102 А связи) на поверхности вблизи канала 199 трубы. Альтернативно, бурильная компоновка может быть установлена в канале 199 трубы. На фиг. 8 показан вариант осуществления устройства 100 для обследования канала трубы, содержащего переднюю группу F и заднюю группу R датчиков. Устройство 100 фиг. 8 может содержать технические признаки, описанные выше и показанные на фиг. 1, и/или 2, и/или 3, и/или 4, и/или 5, и/или 6,и/или 7. В варианте осуществления фиг. 8 каждая из передней и задней групп датчиков содержит ряд ультразвуковых датчиков расстояния. Передняя группа F ультразвуковых датчиков расстояния может, например, содержать некоторое количество ультразвуковых датчиков D расстояния, находящихся в цилиндрической части 104 первой части 101, например, в окружности цилиндрической части 104 и при этом передавать данные, представляющие расстояние между цилиндрической частью 104 и окружающим каналом 199 трубы, как описано выше и показано на фиг. 1. Например, ультразвуковых датчиков D может быть 10. Задняя группа R ультразвуковых датчиков 801 расстояния может содержать некоторое количество ультразвуковых датчиков 801 расстояния, например 10 ультразвуковых датчиков расстояния. Несколько ультразвуковых датчиков 801 расстояния могут передавать данные, представляющие расстояние, например, до окружающего канала 199 трубы. Ультразвуковые датчики 801 расстояния могут содержаться в третьей части 103. Например, 10 ультразвуковых датчиков 801 расстояния могут содержаться в цилиндрической части третьей части 103, например, в окружности цилиндрической части и при этом передавать данные, представляющие расстояние между цилиндрической частью и окружающим каналом 199 трубы. Расстояние между передней группой F и задней группой R ультразвуковых датчиков расстояния известно и может, например, составлять XY мм, например 300 мм. При перемещении устройства 100 в канале трубы передняя группа и задняя группа ультразвуковых датчиков расстояния регистрирует соответствующие величины параметров канала трубы. Например, пе-9 021436 редняя и задняя группы могут определять диаметр канала трубы. Передняя и задняя группы ультразвуковых датчиков могут соединяться с ПЛК, например, проводом и через аналого-цифровой преобразователь (АЦП) и мультиплексор 109. Дополнительно, когда ПЛК принял данные измерения диаметра канала трубы от передней группы,он может запустить таймер, такой как блок синхронизации или т.п. Когда ПЛК принимает идентичные или по существу идентичные измерения (например, 9 из 10 ультразвуковых датчиков в задней группе измеряют аналогичные датчикам в передней группе значения), ПЛК определяет временной интервал между приемом измерений передней группы и измерений задней группы. На основе расстояния между передней и задней группами и временным интервалом ПЛК может определять скорость устройства 100 в канале трубы. В варианте осуществления фиг. 8 каждая из передней и задней группы датчиков содержит ряд датчиков изображения. Дополнительно устройство может содержать светодиод вблизи каждого из датчиков изображения. Расстояние между передней группой F и задней группой R датчиков изображения известно и может, например, составлять XY мм, например 300 мм. Например, передняя группа может передавать записанное изображение в ПЛК. ПЛК может выполнять по меньшей мере одну обработку изображения, например геометрическое хеширование для определения по меньшей мере одного параметра, представляющего изображение. Затем ПЛК может выполнять аналогичную обработку изображений, принятых от задней группы, и когда обнаруживает совпадение между изображением от передней группы и изображением от задней группы, определяет интервал времени между приемом двух изображений, и на основе расстояния между передней и задней группами и интервала времени ПЛК может определять скорость устройства 100 в канале трубы. В варианте осуществления устройство 100 может содержать трубку Пито, обеспечивающую точное определение скорости текучей среды относительно устройства 100. На фиг. 9 показан вариант осуществления устройства 100 для обследования канала трубы, содержащего второй цилиндр 901 высокого давления. Устройство 100 фиг. 9 может содержать технические признаки, описанные выше и показанные на фиг. 1, и/или 2, и/или 3, и/или 4, и/или 5, и/или 6, и/или 7,и/или 8. Цилиндр 901 высокого давления может содержать газ, такой, например, как азот или т.п. Дополнительно устройство 100 может быть герметизированным. Дополнительно устройство 100 может быть пустотелым. Кроме того, второй цилиндр высокого давления может соединяться связью с ПЛК, так что ПЛК может управлять вторым цилиндром 901 высокого давления. Устройство может дополнительно содержать второй датчик давления 902, соединенный связью с ПЛК. Данные внешнего давления, измеренного датчиками Р давления, и внутреннего давления, измеренного датчиком 902 давления, можно передавать в ПЛК. На основе разности между измеренными значениями давления ПЛК может управлять вторым цилиндром 901 высокого давления для выпуска газа для увеличения внутреннего давления и таким образом для уменьшения разности между измеренными значениями давления. В варианте осуществления ПЛК управляет вторым цилиндром 901 высокого давления, выпускающим газ для уравновешивания или по существу уравновешивания (например, внутреннего давления в пределах 5% от внешнего давления) внутреннего давления и внешнего давления. С помощью уравновешивания или по существу уравновешивания внутреннего и внешнего давления обеспечивают возможность создания тонких и легких стенок устройства, поскольку они не подвергаются воздействию значительных перепадов давления. На фиг. 10 показан вариант осуществления устройства 100 для обследования канала трубы, содержащего компас 1001. Устройство 100 фиг. 10 может содержать технические признаки, описанные выше и показанные на фиг. 1, и/или 2, и/или 3, и/или 4, и/или 5, и/или 6, и/или 7, и/или 8, и/или 9. Устройство 100 может содержать компас 1001, установленный спереди устройства 100, например в полусферической головной части 105 первой части 101, показанной на фиг. 1. Компас может соединяться связью, например электрическим проводом или с помощью технологии Bluetooth с ПЛК, и может обеспечивать обнаружение, например, одного или нескольких малых магнитов 1003, 1004, установленных в одной или нескольких структурах, содержащихся в канале трубы. Например, структура может являться накладкой 1002, установленной скважинным трактором, для предотвращения протечки воды в углеводородную эксплуатационную скважину 1005. Накладка 1002 может содержать первый магнит 1003, например, выставленный так, что южный полюс (S) магнита направлен радиально в скважину и установлен для маркировки начала накладки от входа скважины. Накладка может содержать второй магнит 1004, например, выставленный так, что северный полюс (N) магнита направлен радиально в скважину и установлен для маркировки конца накладки от входа скважины. Когда устройство 100 проходит начало накладки 1002, компас 1001 должен изменять свою ориентацию под действием первого магнита 1003 и указывать, что устройство 100 проходит магнитный элемент, например часть накладки 1002. Когда устройство 100 проходит конец накладки 1002, компас 1001 должен изменять свою ориентацию вследствие присутствия второго магнита 1004 и указывать, что устройство 100 проходит магнитный элемент, например часть накладки 1002. В варианте осуществления накладка может содержать ряд магнитов, например три магнита на каждом конце, выполненных с возможностью создания специфического сигнала для начала и конца накладки. Например, три магнита, установленных в начале накладки, выставлены так, что южный полюс первого магнита, северный полюс второго магнита и южный полюс третьего магнита направлены радиально в скважине 1005. Дополнительно, например, три магнита, установленные в конце накладки 1005, могут быть выставлены так, что северный полюс первого магнита, южный полюс второго магнита и северный полюс третьего магнита направлены радиально в скважину 1005. При этом является возможной точная идентификация начала и конца накладки 1005. Другие комбинации числа магнитов и выставления магнитов являются также возможными, например, полюса SSS в начале и полюса NNN в конце накладки. В варианте осуществления ПЛК может использовать информацию, относящуюся к началу и концу накладок, например регулировать скорость и местоположение устройства 100 в скважине. На фиг. 11 показан вариант осуществления устройства 100 для обследования канала трубы, содержащий блок 1101 синхронизации. Устройство 100 фиг. 11 может содержать технические признаки, описанные выше и показанные на фиг. 1, и/или 2, и/или 3, и/или 4, и/или 5, и/или 6, и/или 7, и/или 8, и/или 9,и/или 10. Устройство может содержать блок 1101 синхронизации, например, содержащийся в ПЛК. Другой блок 1102 синхронизации может содержаться в оборудовании 1103 устья скважины, установленном на входе в канал 199 трубы. Дополнительно ультразвуковой измерительный преобразователь 1104 может быть установлен в оборудовании 1103 устья скважины. Блок 1101 синхронизации в устройстве 100 и блок 1102 синхронизации в оборудовании 1103 устья скважины могут быть синхронными. Дополнительно ультразвуковой измерительный преобразователь 1104 можно программировать для передачи ультразвукового сигнала в канале 199 трубы к устройству 100 на заданных интервалах времени, например 1 мин после ухода устройства 100 от оборудования устья скважины, 2 мин после ухода и т.д. Устройство 100 может содержать запись, например, в ПЛК, включающую в себя информацию о времени передачи сигналов в канал 199 трубы ультразвуковым измерительным преобразователем 1104. Дополнительно устройство 100 может определять разность времен приема сигнала и фактическим временем передачи сигнала с измерительного преобразователя 1104. Зная скорость звука в текучей среде, в которой устройство в настоящее время перемещается, ПЛК может определять расстояние, пройденное устройством 100 во время приема сигнала с измерительного преобразователя 1104, умножив разность времен на скорость звука в текучей среде. Например, если разность времен между временем передачи и временем приема сигнала определена в 5 с, и текучая среда является водой, в которой скорость звука составляет приблизительно 1484 м/с, то устройство прошло приблизительно 7420 м в канале 199 трубы. Устройство 100 может передавать данные пройденного расстояния во внешний блок 102 А связи через акустический модем 108. В варианте осуществления внешний блок 102 А связи может вычислять скорость текучей среды, выходящей из скважины. Например, внешний блок связи может иметь информацию о частоте, на которой устройство 100 передает (например, через акустический модем 108) сигнал, представляющий расстояние,пройденное устройством 100. Следовательно, внешний блок 102 А связи может определять допплеровский сдвиг частоты принятого сигнала и по допплеровскому сдвигу может определять скорость текучей среды, в которой сигнал от устройства 100 передается. Приведенные выше описания вариантов осуществления изобретения представлены только для иллюстрации и описания. Они не являются исчерпывающими и не направлены на ограничение изобретения в описанных формах. Соответственно многие модификации и изменения должны быть ясны специалисту в данной области техники. Кроме того, приведенное выше описание не направлено на ограничение изобретения. Объем изобретения определяет прилагаемая формула изобретения. В общем, любые технические признаки и/или варианты осуществления, описанные выше и/или ниже, можно объединять в один вариант осуществления. Альтернативно или дополнительно, любые технические признаки и/или варианты осуществления, описанные выше и/или ниже, могут являться отдельными вариантами осуществления. Альтернативно или дополнительно, любые технические признаки и/или варианты осуществления, описанные выше и/или ниже, можно комбинировать с любым числом других технических признаков и/или вариантов осуществления, описанных выше и/или ниже для создания любого числа вариантов осуществления. В пунктах формулы изобретения, касающихся устройства с перечислением нескольких средств, несколько данных средств могут быть реализованы в одном и том же блоке агрегатного обеспечения. Сам факт, что некоторые меры указаны в различных зависимых пунктах формулы изобретения или описаны в различных вариантах осуществления, не означает, что комбинацию данных мер нельзя использовать предпочтительно. Должно быть отмечено, что термин "содержит/содержащий" при использовании в данном описании нацелен на конкретизацию присутствия указанных признаков, целых чисел, этапов или компонентов, но не исключает присутствия или добавления одного или нескольких других признаков, целых чисел, этапов, компонентов или их групп. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство (100) для обследования канала (199) трубы, содержащее средство (401) придания плавучести; по меньшей мере один датчик (V, D, 107, Р, R, Т), выполненный с возможностью измерения скважинных параметров; программируемый логический контроллер (180),отличающееся тем, что устройство дополнительно содержит трехходовой клапан (V2), средство (407) создания давления и выпускную линию,при этом трехходовой клапан выполнен с возможностью регулирования потока текучей среды между средством (407) создания давления и средством (401) придания плавучести и между средством (401) придания плавучести и выпускной линией (406); программируемый логический контроллер (180), связанный по меньшей мере с одним датчиком (V,D, 107, Р, R, Т) и выполненный с возможностью приема измеренных скважинных параметров и генерирования сигнала управления на основе измеренных скважинных параметров, принимаемых по меньшей мере с одного датчика (V, D, 107, Р, R, Т); и при этом средство (407) создания давления выполнено с возможностью сообщения по текучей среде со средством (401) придания плавучести через трехходовой клапан (V2) таким образом, что текучая среда может проходить из средства (407) создания давления в средство (401) придания плавучести или из средства (401) придания плавучести в окружающую среду устройства (100) через выпускную линию(406); при этом программируемый логический контроллер (180) связан с трехходовым клапаном (V2) и выполнен с возможностью управления трехходовым клапаном (V2) с помощью сигналов управления. 2. Устройство по п.1, в котором первое средство (401) придания плавучести содержится в первой части (101) устройства (100); средство (407) создания давления содержится во второй части (102) устройства (100); второе средство (401) придания плавучести содержится в третьей части (103) устройства (100),при этом первая часть и третья часть соединены через вторую часть и при этом вторая часть состоит из двух пустотелых деталей (202, 203), соединенных сферическим шарниром (201). 3. Устройство (100) по п.2, в котором первая из двух пустотелых деталей содержит пружину (205) и стержень (204), при этом один конец (207) стержня соединен со сферическим шарниром (201) и другой конец (207) стержня соединен с пружиной (205), при этом пружина (205) выполнена с возможностью удерживать две пустотелые детали второй части (102) на прямой линии. 4. Устройство (100) по п.3, в котором первая из пустотелых деталей дополнительно содержит три цилиндра (301), установленных перпендикулярно стержню для обеспечения смещения стержня от прямой линии. 5. Устройство (100) по любому из пп.2-4, в котором сферический шарнир (201) и стержень являются пустотелыми для обеспечения прохода соединения связи и/или сообщения текучей средой. 6. Устройство (100) по любому из пп.1-5, дополнительно содержащее множество гибких рычагов(110) с одним концом, соединенным с окружностью устройства (100), и другим концом, проходящим радиально от устройства (100) с радиусом больше радиуса устройства (100) и максимальным наружным диаметром, определяемым тканью, растянутой между гибкими рычагами (110). 7. Устройство (100) по п.6, выполненное с возможностью сокращения габарита другого конца множества гибких рычагов (110) до радиуса, приблизительно равного радиусу устройства при получении сигнала управления с программируемого логического контроллера (180). 8. Устройство (100) по любому из пп.1-7, дополнительно содержащее множество сопел (502), сообщающихся текучей средой со средством (407) создания давления, так чтобы обеспечить выпуск текучей среды под давлением из средства (407) создания давления по меньшей мере через одно из множества сопел (502). 9. Устройство (100) по п.8, в котором средство (407) создания давления выполнено с возможностью сообщения по текучей среде с множеством сопел (502) через группу (503) клапанов. 10. Устройство (100) по п.9, в котором программируемый логический контроллер (180) выполнен с возможностью регулирования установления сообщения текучей средой между средством (407) создания давления и множеством сопел (502) с помощью сигналов управления. 11. Устройство (100) по любому из пп.1-10, дополнительно содержащее средство (108) связи, связанное с внешним блоком связи для передачи данных по меньшей мере с одного датчика (V, D, 107, Р, R,Т) во внешний блок связи. 12. Устройство (100) по п.6, в котором средство (108) связи дополнительно выполнено с возможностью принимать сигналы управления с внешнего блока связи для управления устройством (100) с внеш- 12021436 него блока связи. 13. Устройство (100) по любому из пп.1-12, дополнительно содержащее первое средство обнаружения и второе средство обнаружения и в котором первое и второе средства обнаружения установлены на фиксированном расстоянии между ними, при этом устройство выполнено с возможностью определения разницы времен между приемом первого сигнала с первого средства обнаружения и, по существу, идентичного сигнала со второго средства обнаружения и определения скорости устройства делением фиксированного расстояния на разность времен. 14. Устройство по пп.1-13, содержащее блок синхронизации, синхронный со вторым блоком синхронизации, установленные связанными с передатчиком, при этом устройство выполнено с возможностью принимать сигнал с передатчика, переданный в заданное время, и вычислять на основе разницы времен между заданным временем и временем получения сигнала устройством и скорости звука в среде,в которой находится устройство, расстояния между передатчиком и устройством. 15. Устройство по пп.1-14, в котором устройство содержит компас, обеспечивающий обнаружение элементов, содержащих магнитные материалы, в канале трубы. 16. Устройство по любому из пп.1-14, содержащее первый датчик давления для измерения давления внутри устройства и второй датчик давления для измерения давления снаружи устройства, второе средство создания давления, обеспечивающее подачу газа внутрь устройства, причем первый и второй датчики давления и второе средство создания давления связаны с вычислительным средством, так что вычислительное средство выполнено с возможностью обеспечения компенсации перепада давления внутри и снаружи устройства с помощью подачи газа внутрь устройства. 17. Способ обследования канала (199) трубы устройством (100) по п.1, содержащий установление связи между программируемым логическим контроллером 180 и по меньшей мере одним датчиком (V, D, 107, Р, R, Т), выполненным с возможностью измерения скважинных параметров и между программируемым логическим контроллером (180) и трехходовым клапаном (V2); генерирование в программируемом логическом контроллере (180) сигнала управления на основе измеренных скважинных параметров, принимаемых по меньшей мере с одного датчика (V, D, 107, Р, R,Т); установление сообщения текучей средой средства (407) создания давления со средством (401) придания плавучести через трехходовой клапан (V2), так что текучая среда может проходить из средства(407) создания давления в средство (401) придания плавучести или из средства (401) придания плавучести в окружающую среду устройства (100) через выпускную линию (406); управление программируемым логическим контроллером (180) трехходовым клапаном (V2) с помощью сигналов управления так, что поток текучей среды между средством (407) создания давления и средством (401) придания плавучести и между средством (401) придания плавучести и выпускной линией (406) регулируется с помощью трехходового клапана (V2). 18. Скважинная система, содержащая канал (199) трубы и устройство по любому из пп.1-16. 19. Система по п.18, в которой канал (199) трубы является стволом скважины, содержащей воду или углеводороды нефти в виде текучей среды. 20. Система по п.18 или 19, в которой устройство (100) соединяется с каналом (199) трубы либо скважинным трактором или бурильной компоновкой. 21. Система по любому из пп.18-20, в которой канал (199) трубы относится к насоснокомпрессорной колонне либо обсадной колонне или гибкой насосно-компрессорной трубе. 22. Система по любому из пп.18-21, в которой устройство (100) соединяется с бурильной компоновкой проводом. 23. Система по любому из пп.18-22, в которой устройство (100) эксплуатируют на каротажном кабеле и перекачивают в канале (199) трубы или в которой устройство (100) спускают в канал (199) трубы с использованием силы тяжести.
МПК / Метки
МПК: E21B 23/14, E21B 23/08
Метки: система, устройство, обследования, способ, канала, трубы
Код ссылки
<a href="https://eas.patents.su/17-21436-ustrojjstvo-sistema-i-sposob-obsledovaniya-kanala-truby.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство, система и способ обследования канала трубы</a>
Способ и система получения информации о размерах проточного канала
Номер патента: 6047
Опубликовано: 25.08.2005
Автор: Хейм Уоррен П.
МПК: A61B 5/02
Метки: размерах, информации, проточного, система, канала, способ, получения
Формула / Реферат:
1. Способ неинвазивного анализа канала протекания потока крови в организме, заключающийся в том, что получают первую информацию о профиле скоростей в канале протекания потока крови в первый момент времени, получают вторую информацию о профиле скоростей в канале протекания потока крови во второй момент времени, используют первую информацию и вторую информацию для получения обработанной информации о размере проточного канала, при этом при...
Устройство присоединения корпуса трубы к трубной муфте и способ присоединения корпуса трубы
Номер патента: 13258
Опубликовано: 30.04.2010
Авторы: Козава Сатоси, Вада Наото
МПК: F16L 47/08, F16L 47/16, F16J 15/00...
Метки: трубы, корпуса, трубной, способ, муфте, устройство, присоединения
Формула / Реферат:
1. Устройство присоединения корпуса трубы к трубной муфте, содержащее принимающий узел, вставленный в часть с отверстием, сформированную в стене трубной муфты и закрепленную в стене, и трубный узел для присоединения корпуса трубы к принимающему узлу, имеющий удерживающую часть для удержания принимающего узла надетым на внешнюю поверхность на одной торцевой стороне основной части соединения, и торцевую часть корпуса трубы, вставленную во...
Устройство для формирования проводящего канала в животном и способы формирования такого канала
Номер патента: 6149
Опубликовано: 27.10.2005
Авторы: Андерсон Марк Е., Андерсон Дональд Е., Лим Канг С., Андерсон Гленн М.
МПК: A01K 29/00
Метки: такого, канала, способы, формирования, устройство, проводящего, животном
Формула / Реферат:
1. Способ создания проводящего канала в тракте животного с использованием катетера, имеющего трубку, которая соединена с мембраной, изначально размещенной в этой трубке, включающий введение трубки в тракт животного; и продвижение мембраны через отверстие в трубке внутрь тракта с формированием проводящего канала в тракте, причем мембрана продвигается в тракт при отсутствии скольжения относительно тракта. 2. Способ по п.1, отличающийся тем, что...
Устройство и способ для заполнения газом канала в контейнере
Номер патента: 12348
Опубликовано: 30.10.2009
Автор: Густафссон Пер
МПК: B65B 61/14, B31B 1/86, B65D 30/16...
Метки: газом, способ, канала, заполнения, контейнере, устройство
Формула / Реферат:
1. Устройство (20) для заполнения газом канала (7) в складном контейнере (1), причем канал (7) образован первой и второй боковыми стенками (2) контейнера (1), которые соединены по общей соединительной части (4), а канал (7) имеет впускное отверстие (15), расположенное в первой боковой стенке (2), при этом устройство (20) содержит упор (21) и газовый модуль (26) с выпускным отверстием (28), которое расположено на поверхности газового модуля (26),...
Способ и устройство для крепления расширяемой трубы
Номер патента: 3447
Опубликовано: 26.06.2003
Авторы: Дюкасс Кристофер, Остерлинг Петер
МПК: E21B 43/10
Метки: устройство, крепления, расширяемой, трубы, способ
Формула / Реферат:
1. Устройство для крепления расширяемой трубы, содержащее, по меньшей мере, одну формацию, выполненную на наружной поверхности расширяемой трубы, причeм формация может входить в зацепление со второй трубой, в которой размещена расширяемая труба, при этом формация обеспечивает крепление и/или уплотнение расширяемой трубы, когда расширяемая труба, по меньшей мере, частично расширена. 2. Устройство по п.1, в котором формация содержит упругий...
Предыдущий патент: Способ и устройство для наблюдения состояния сети
Следующий патент: Соединения, ингибирующие lrrk2 киназную активность
Случайный патент: Ингаляционное устройство для транспульмонального введения