Способ сейсморазведочных построений в сложных геологических формациях

Формула / Реферат
1. Компьютеризированный способ построения изображений с управляемой амплитудой геологической формации, являющейся объектом разведки, в подземной области с использованием трехмерного массива сейсмических данных, полученных из подземной области, и известного распределения скоростей для этой подземной области, причем сейсмические данные содержат множество сейсмических трасс, каждая трасса имеет известное место расположения пункта взрыва и известное место расположения приемника, заключающийся в том, что
(a) осуществляют дискретизацию трехмерного подземного пространства, содержащего формацию, являющуюся объектом разведки, с преобразованием в сетку ячеек, при этом каждая ячейка изображения содержит множество точек заранее выбранной сетки из точек трехмерного изображения, а размеры ячейки выбраны таким образом, чтобы обеспечить баланс между потребностями в объеме памяти для хранения данных и точностью построения изображения,
(b) осуществляют дискретизацию поверхности над формацией, являющейся объектом разведки, с преобразованием в сетку ячеек, при этом размеры ячеек на поверхности выбирают в соответствии с расстояниями между пунктом взрыва и приемниками, чтобы обеспечить баланс между потребностями в объеме памяти для хранения данных и точностью построения изображения,
(c) вычисляют файлы карты лучей, исходя из информации о распределении скоростей, при этом упомянутые файлы представляют все физически значимые траектории лучей, соединяющие представляющую точку в ячейке на поверхности с представляющей точкой в ячейке изображения, с использованием распределения скоростей в подземной области для определения траекторий лучей, причем упомянутые файлы карты лучей содержат, по меньшей мере, время пробега от ячейки на поверхности до ячейки изображения, направление выхода луча из каждой ячейки на поверхности и направление прихода луча в каждую ячейку изображения, упомянутые направления заданы в трехмерном пространстве,
(d) повторяют операцию (с) для каждой ячейки на поверхности и для каждой ячейки изображения,
(e) сохраняют файлы карты лучей в запоминающем устройстве компьютера,
(f) выполняют интерполяцию значений времени пробега из файлов карты лучей, упомянутые интерполированные значения времени представляют собой значения времени пробега от конкретных мест расположения пункта взрыва и приемников, связанных с одной трассой сейсмических данных, до каждой узловой точки на сетке из точек изображения для каждой упомянутой физически значимой траектории луча, соединяющей их, а для выполнения операции интерполяции выполняют интерполяцию представляющей точки ячейки на поверхности, расположенной вблизи от каждого конкретного места расположения пункта взрыва и каждого конкретного места расположения пункта приема, выполняют интерполяцию представляющей точки ячейки изображения, расположенной вблизи от каждой точки на сетке изображения, при этом упомянутые операции интерполяции реализованы с использованием информации о направлении луча, содержащейся в соответствующем файле карты лучей, для гарантии того, что интерполяцию выполняют между точками на одной и той же ветви поверхности времен пробега,
(g) повторяют операцию (f) для каждой трассы в трехмерном массиве сейсмических данных, и
(h) выполняют миграцию сейсмических данных с использованием интерполированных значений времени пробега и амплитуд лучей.
2. Способ по п.1, отличающийся тем, что каждая карта лучей, хранящаяся в запоминающем устройстве компьютера, построена в виде компактного перечня лучей, эффективный доступ к которому осуществляют по индексу, созданному при считывании карты из диска.
3. Способ по п.1, отличающийся тем, что при выполнении операции (f) интерполяции используют следующее уравнение:
![]()
где dt- малое изменение времени пробега, ![]() - произвольное малое смещение в трехмерном пространстве,
- произвольное малое смещение в трехмерном пространстве, ![]() - вектор наклона в точке
- вектор наклона в точке ![]()
4. Способ по п.1, отличающийся тем, что файлы карты лучей также содержат относительную амплитуду каждой траектории луча, при этом траектория луча является физически значимой в том случае, если соответствующая ей амплитуда является большей, чем заранее установленное значение.
5. Способ по п.1, отличающийся тем, что трехмерное пространство подземной среды, содержащее формацию, являющуюся объектом разведки, делят на срезы, которые перпендикулярны одной из координатных осей x-y-z, обработку каждого среза поручают отдельному устройству обработки данных, а соответствующие сегменты карт лучей распределяют по локальным запоминающим устройствам каждого устройства обработки данных.
6. Способ по п.5, отличающийся тем, что срезами являются интервалы глубин.
7. Способ по п.5, отличающийся тем, что срезами являются наборы продольных профилей.
8. Способ по п.5, отличающийся тем, что срезами являются наборы поперечных профилей.
9. Способ по п.1, отличающийся тем, что информацией о направлении выхода лучей и о направлении прихода лучей в файлах карты лучей являются три направляющих косинуса в ортогональной декартовой системе координат (х, у, z).
10. Способ по п.1, отличающийся тем, что данные для файлов карты лучей вычисляют с использованием программного продукта "NORSAR-3D".
11. Способ по п.10, отличающийся тем, что производят анализ файлов карты лучей, созданные программой "NORSAR-3D", для извлечения статистических данных и информации о месте расположения данных для конкретных областей, являющихся объектом разведки, в этих файлах.
12. Способ по п.1, отличающийся тем, что определяют углы прихода лучей в точку изображения для каждой трассы, и трассы разделяют на общие глубинные площадки с общим углом отражения, и используют алгоритм миграции на основе общего угла отражения для миграции сейсмических данных по общей глубинной площадке.
13. Способ по п.12, отличающийся тем, что угол a отражения определяют из уравнения
![]()
где ![]() и
и ![]() - единичные векторы, определяющие наклон лучей (направление лучей), соответственно, от источника и от приемника в точке изображения.
- единичные векторы, определяющие наклон лучей (направление лучей), соответственно, от источника и от приемника в точке изображения.
14. Способ по п.1, отличающийся тем, что соотношения между размерами ячейки относительно более мелкой сетки точек изображения и расстояниями от источника до приемника не больше, чем 42 на 62 на 8 и не меньше, чем 32 на 42 на 8, при этом упомянутые цифры относятся, соответственно, к размерам по координатам х и у на поверхности, к размерам по координатам х и у в изображении и к размеру по координате z в изображении.
15. Способ по п.1, отличающийся тем, что все сейсмические трассы имеют равное удаление.
16. Способ по п.1, отличающийся тем, что для выбора из массива отфильтрованных трасс в зависимости от углов наклона в подземной среде и на поверхности используют заранее вычисленную таблицу индексов фильтра.
17. Способ по п.1, отличающийся тем, что точки изображения для ячейки изображения запомнены в смежном блоке данных, при этом впоследствии производят срезы блоков по горизонтали на отдельные уровни по глубине.
18. Способ по п.1, отличающийся тем, что также вычисляют коэффициент КМАН (огибающую), запоминают его в файлах карты лучей и используют при операции миграции.
19. Способ по п.1, отличающийся тем, что вычисленные амплитуды траекторий лучей используют для вычисления весовых коэффициентов для сохранения амплитуд сейсмической волны при операции миграции.
20. Способ по п.1, отличающийся тем, что дополнительно распределяют данные сейсмических трасс из трехмерного массива сейсмических данных по множеству различных компьютерных устройств обработки данных для выполнения способа построения изображений с контролируемой амплитудой, р затем суммируют готовые вклады от различных устройств обработки данных для формирования выходного изображения.
21. Способ по п.20, отличающийся тем, что выходное изображение вычисляют для заранее выбранного подмножества плоскостей вдоль профиля или поперек профиля.
22. Способ по п.20, отличающийся тем, что данные для файлов карты лучей вычисляют с использованием программного продукта "NORSAR-3D", и из полных карт извлекают и передают в упомянутое множество устройств обработки данных только те данные карты, которые соответствуют наборам плоскостей вдоль профиля или поперек профиля.
23. Способ по п.10, отличающийся тем, что дополнительно считывают данные для множества лучей из карты лучей для выполнения операций интерполяции значений времени пробега за один вызов подпрограммы непосредственно из входного буфера.
24. Способ по п.1, отличающийся тем, что дополнительно оценивают достоверность упомянутых сейсмических данныхпосле миграции с использованием вычисленных углов наклона и углов отражения из файлов карты лучей для выбранных точек изображения, при этом направление наклона каждой выбранной точки изображения представляют в виде графика в полярных координатах, и производят сравнение точек на графике с теми областями графика в полярных координатах, которые имеют наклон и которые заполнены сейсмическими данными.
25. Способ по п.1, отличающийся тем, что файлы карты лучей также содержат относительную амплитуду каждой траектории луча.

Текст
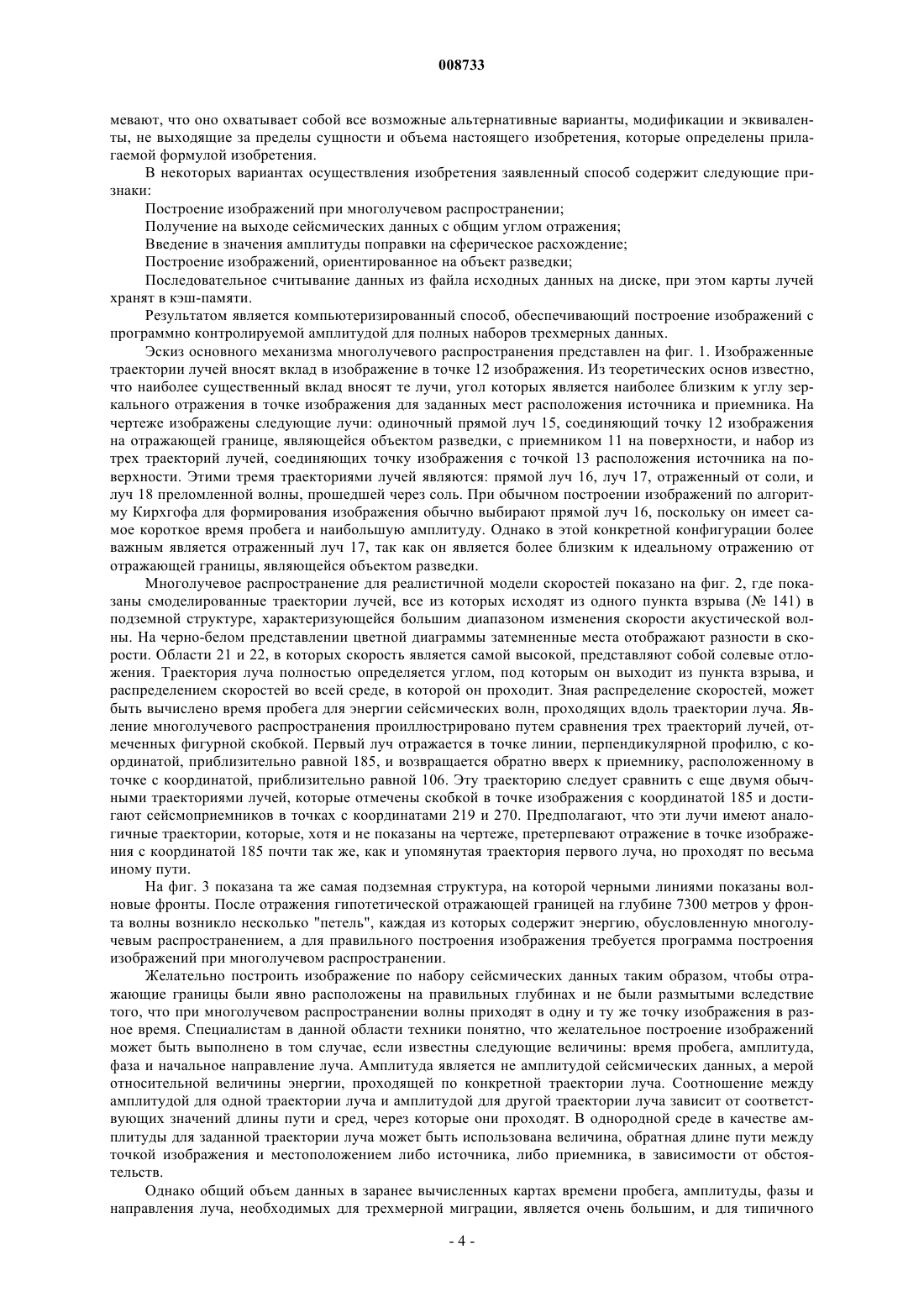
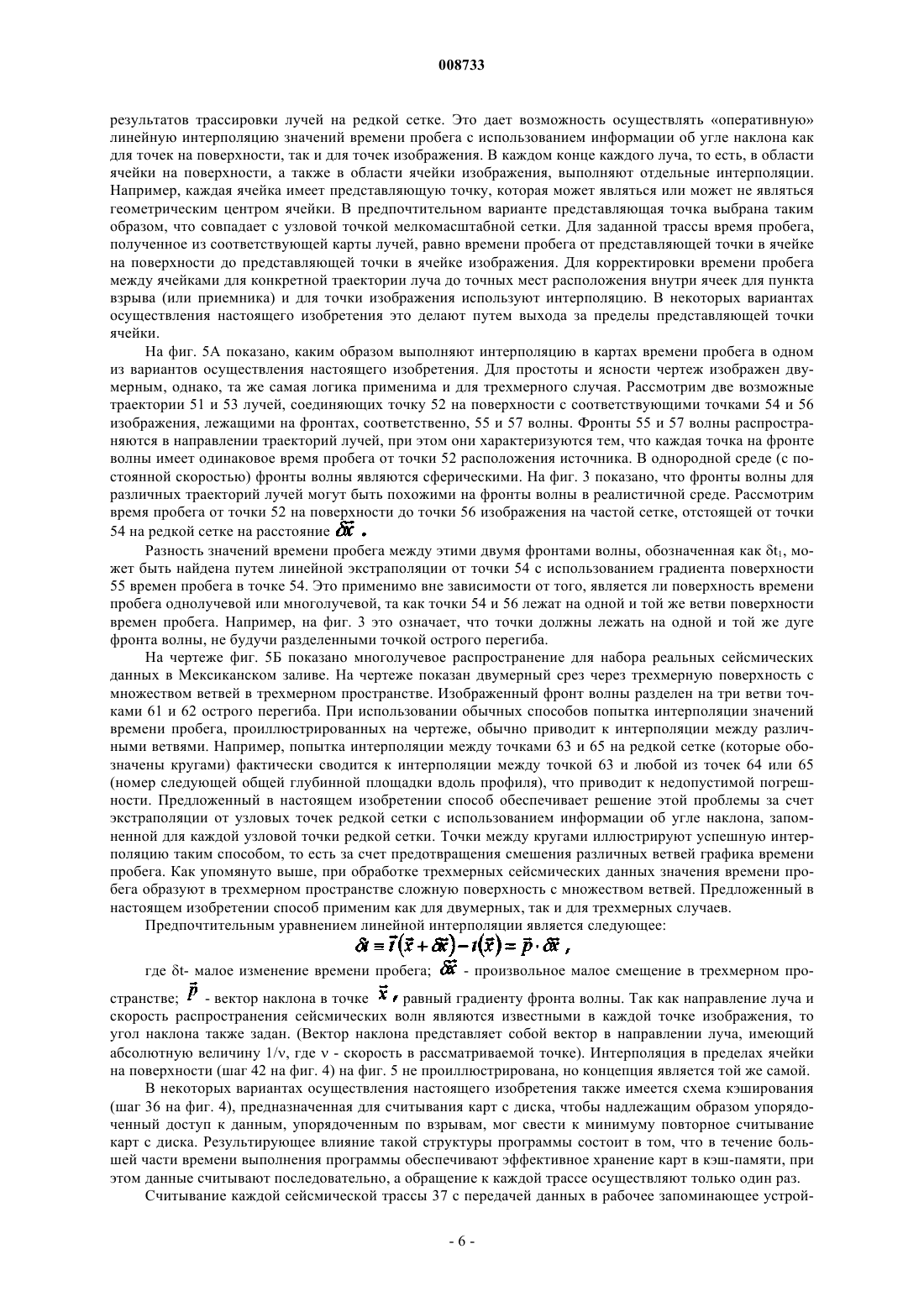
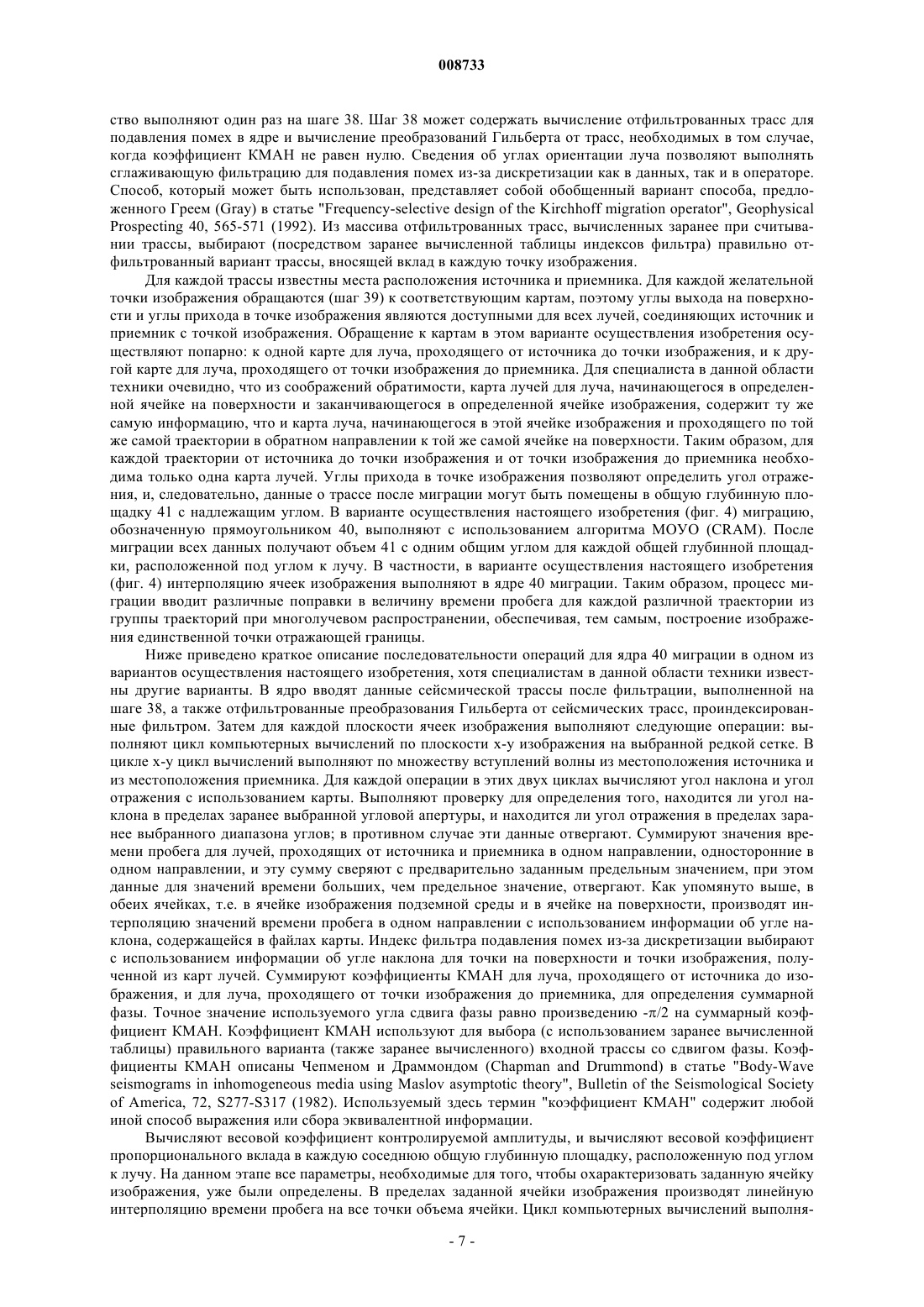
008733 По заявке на изобретение испрашивается приоритет предварительной заявки на патент США 60/529272 от 12 декабря 2003 г. Область техники Настоящее изобретение относится к геофизической разведке и, в частности, к обработке сейсмических данных. В частности, настоящее изобретение относится к способу сейсморазведочных построений в сложных геологических формациях. Предшествующий уровень техники Примеры такого сложного геологического строения встречаются в Мексиканском заливе вблизи от соляных тел либо под ними, в прибрежной зоне Анголы вблизи от солевых образований либо под ними или в сложных тектонических формациях, например, в тех формациях, которые были найдены в предгорьях Скалистых гор в Канаде или в Андах в Венесуэле. Одна из основных проблем при построении изображений в таких сложных формациях состоит в том, что энергия сейсмических волн может доходить до каждой точки изображения от источника или от приемника по множеству траекторий лучей. Это явление именуют многолучевым распространением. Существующие в настоящее время способы, предложенные для построения изображения при многолучевом распространении, являются медленными и дорогостоящими, и, следовательно, нецелесообразными с практической точки зрения для широкого применения для построения трехмерных изображений с использованием существующей в настоящее время компьютерной технологии. В большинстве традиционных способов построения изображений предполагают наличие только одной траектории, соединяющей источник, точку изображения и приемник. Это справедливо во всех тех случаях, когда скорость сейсмических волн под поверхностью земли имеет простой характер поведения,например в том случае, когда регулирующее воздействие на нее оказывают, главным образом, уплотнения, и она изменяется, в основном, в вертикальном направлении, а ее изменение в поперечном направлении является весьма медленным. Попытки, связанные с построением изображений при многолучевом распространении, делятся на три класса:(а) Миграция равноудаленных глубинных площадок по алгоритму Кирхгофа. В этом подходе сейсмические данные объединяют в равноудаленные (по расстоянию между источником и приемником) общие глубинные площадки и осуществляют их миграцию с использованием одиночной предпочтительной траектории луча, соединяющей источник с точкой изображения и с приемником. При наличии множества возможных траекторий лучей выбирают одну траекторию, которой часто является траектория с максимальной амплитудой, траектория первого вступления или какой-либо иной заранее выбранной критерий. Этот способ построения изображений является удовлетворительным тогда,когда изменение поперечной составляющей скорости не является сильным. Однако, многолучевое распространение оказывает существенное воздействие на построение изображений подсолевых структур, и множество траекторий лучей могут иметь сопоставимый вес в изображении. Таким образом, часто происходит то, что миграция Кирхгофа не способна обеспечить удовлетворительное построение изображений подсолевых отражающих границ. Кроме того, в полученные по алгоритму Кирхгофа изображения неудобно вводить поправку на сферическое расхождение, так как это требует относительно дорогого вычисления определителя Бейлкина (Beylkin). Теория того, каким образом следует вводить в амплитуды Кирхгофа поправку на сферическое расхождение, объяснена в работе Schleicher et al., "3-D TrueAmplitude Finite-Offset Migration", Geophysics 58 r 1112-1126 (1993). Таким образом, амплитуды Кирхгофа часто являются менее пригодными для последующей интерпретации данных.(б) Миграция на основе решения волнового уравнения (МВУ, WEM), МВУ (WEM) является более изысканным способом построения изображений. В типичном подходе к решению этой проблемы на основании данных, зарегистрированных во всех приемниках для заданного пункта взрыва, производят построение обратного распространения сейсмической волны с использованием волнового уравнения. Производят построение распространения энергии от взрыва в прямом направлении с использованием волнового уравнения, и вычисляют взаимную корреляцию двух волновых полей, создавая, таким образом, изображение, что описано Клербо (Claerbout) в книге "Fundamentals of Geophysical Data Processing, McGrawHill" (1976). Одна из трудностей при таком подходе состоит в том, что ответы обычно не обеспечивают сохранение амплитуды сейсмической волны, и, следовательно, результирующее изображение не может быть непосредственно интерпретировано с учетом амплитуды. Это является существенной проблемой для интерпретатора сейсмических данных, поскольку амплитуды передают информацию о коэффициентах отражения и, следовательно, о свойствах подземных пород. Другая проблема, связанная с МВУ (WEM), состоит в том, что продолжение нисходящей волны является дорогостоящим с точки зрения вычислений. Кроме того, необходимо вычисление волновых полей для всех областей, расположенных ниже источника и приемника, в том числе для тех участков, которые не представляют интереса для конечного изображения; в МВУ (WEM) трудно использовать "построение изображений, ориентированное на объект разведки". Оба способа, т.е. способ Кирхгофа и описанный ниже способ миграции на основе общего угла отражения, МОУО (CRAM), могут действовать в режиме,ориентированном на объект разведки. Таким образом, МВУ (WEM) обычно требует больших вычисли-1 008733 тельных ресурсов, и для создания результата по-прежнему необходимо большое количество времени.(в) Миграция на основе общего угла отражения (МОУО CRAM). В этом подходе миграцию данных осуществляют по общим глубинным площадкам с общим углом отражения. Поскольку лучи однозначно определяются их углом выхода и начальной точкой в пространстве, то МОУО (CRAM) позволяет добавлять в изображение все лучи, соединяющие источник, точку изображения и приемник. В принципе, МОУО (CRAM) объединяет значительную или наибольшую часть способности построения изображений, имеющейся в способе МВУ (WEM), с относительной экономией миграции по алгоритму Кирхгофа. В статье Kcy и др. (Xu et al. "Common-angle migration: A strategy forimaging complex media", Geophysics 66, 1877-1894, 2001) весьма подробно описаны теоретические аспекты МОУО (CRAM). Описанный авторами способ действительно сохраняет амплитуду сейсмической волны за счет амплитудного взвешивания трасс. Однако авторами не описан способ вычислений, являющийся целесообразным для практического применения для наборов трехмерных данных типичного размера. В статье Корена и Козлова (Koren and Kosloff "Common reflection angle migration", Journal of SeismicExploration 10, 41-57, 2001) описан подход к решению задачи МОУО (CRAM). В предложенном ими способе последовательно переходят от одной точки изображения к другой точке изображения. Из каждой точки изображения лучи выводят вверх к поверхности. Мигрированную трассу добавляют в изображение, полученное в найденных таким образом местах расположения источника и приемника. Это означает,что считывание сейсмических данных с диска должно производиться в произвольном порядке. Такой подход к вычислениям является неэффективным, и он целесообразен для практического применения только лишь при построении двумерных изображений. Однако в эксплуатационной практике и, в особенности, при наличии сложного геологического строения обычно требуется построение истинных трехмерных изображений. Сущность изобретения Вследствие наличия ограничений, присущих вышеупомянутым способам, технической задачей настоящего изобретения является создание способа построения изображений подсолевых структур (или построения изображений иных сложных формаций), который является приемлемым с точки зрения объема вычислений и может обеспечить построение изображений в трехмерном пространстве при многолучевом распространении. Поставленная задача согласно изобретению решена путем создания компьютеризированного способа сейсморазведочных построений, обеспечивающего надлежащий учет многолучевого распространения при построении изображений с наличием больших объемов сейсмических данных, например трехмерных массивов данных, полученных из сложных геологических формаций. Способ требует наличия сведений о распределении скоростей в подземной среде и входных сейсмических данных, собранных при помощи источников и приемников, расположенных в известных местах. В одном из вариантов осуществления настоящего изобретения файлы данных карты лучей вычисляют с использованием распределения скоростей для лучей, соединяющих набор ячеек на поверхности, содержащий пункты взрыва и места расположения приемников, с набором ячеек изображения в подземной среде. Пользователь выбирает размер ячеек на поверхности в соответствии с расстоянием между источником и приемником и размер ячеек изображения в соответствии с желательной сеткой изображения для обеспечения баланса между разрешающей способностью изображения и производительностью запоминающего устройства для данных и скоростью обработки данных. Каждый файл карты лучей предпочтительно содержит, как минимум, время пробега от одной ячейки до другой ячейки, амплитуду, коэффициент КМАН (огибающую), направление выхода луча в ячейке на поверхности и направление прихода луча в ячейке изображения, причем все эти данные для каждой отдельной траектории луча. Компьютерная программа "NORSAR-3D" представляет собой имеющуюся в продаже программу моделирования путем трассировки лучей, которая может вычислять эти параметры. Для получения времени пробега от места расположения источника или приемника до точки изображения производят интерполяцию значений времени пробега от одной ячейки до другой ячейки, полученных из файлов карты лучей, для каждой сейсмической трассы. Для управления интерполяцией используют информацию о направлении луча. Миграцию сейсмических данных осуществляют с использованием интерполированных значений времени пробега для каждого вступления волны в каждую точку изображения, значений амплитуды и коэффициентов КМАН (ряда огибающих). Выходной трехмерный массив сейсмических данных может быть удобно представлен в виде горизонтальных или вертикальных срезов для эффективного распараллеливания вычислений. Для миграции данных в срезы с общим углом отражения вместе может быть использован алгоритм МОУО (CRAM). Раскрыты способы для эффективного использования вычислительных ресурсов. Изобретение также может быть использовано для генерации правильно мигрированных данных в равноудаленных объемах. В одном из вариантов осуществления настоящего изобретения предложен компьютеризированный,обеспечивающий контролируемую амплитуду способ построения изображений геологической формации,являющейся объектом разведки, в области подземной среды с использованием трехмерного массива сейсмических данных, полученных из этой подземной области, и известного распределения скоростей для этой подземной области, причем упомянутые сейсмические данные содержат множество сейсмиче-2 008733 ских трасс, каждая трасса имеет известное место расположения пункта взрыва и известное место расположения приемника, а упомянутый способ содержит следующие операции: (а) осуществляют дискретизацию трехмерного подземного пространства, содержащего формацию, являющуюся объектом разведки,с преобразованием в сетку ячеек, при этом каждая ячейка изображения содержит множество точек заранее выбранной сетки из точек трехмерного изображения, а размеры ячейки выбирают таким образом,чтобы обеспечить баланс между потребностями в объеме памяти для хранения данных и точностью построения изображения; (b) осуществляют дискретизацию поверхности над формацией, являющейся объектом разведки, с преобразованием в сетку ячеек, при этом размеры ячеек на поверхности выбирают в соответствии с расстояниями между пунктом взрыва и приемниками таким образом, чтобы обеспечить баланс между потребностями в объеме памяти для хранения данных и точностью построения изображения; (с) исходя из информации о распределении скоростей, вычисляют файлы карты лучей, при этом упомянутые файлы отображают все физически значимые траектории лучей, соединяющие представляющую точку в ячейке на поверхности с представляющей точкой в ячейке изображения, с использованием распределения скоростей в подземной области для определения траекторий лучей, причем упомянутые файлы карты лучей содержат, по меньшей мере, время пробега от ячейки на поверхности до ячейки изображения, направление выхода луча из каждой ячейки на поверхности и направление прихода луча в каждую ячейку изображения, причем направления заданы в трехмерном пространстве; (d) повторяют операцию (с) для каждой ячейки на поверхности и для каждой ячейки изображения; (е) сохраняют файлы карты лучей в запоминающем устройстве компьютера; (f) выполняют интерполяцию значений времени пробега из файлов карты лучей, при этом упомянутые интерполированные значения времени представляют собой значения времени пробега от конкретных мест расположения пункта взрыва и приемников,связанных с одной трассой сейсмических данных, до каждой узловой точки на сетке из точек изображения для каждой упомянутой физически значимой траектории луча, соединяющей их, при этом операция интерполяции содержит следующие операции: (i) выполняют интерполяцию представляющей точки ячейки на поверхности, расположенной вблизи от каждого конкретного места расположения пункта взрыва и каждого конкретного места расположения пункта приема, (ii) выполняют интерполяцию представляющей точки ячейки изображения, расположенной вблизи от каждой точки на сетке изображения,при этом операции интерполяции реализованы с использованием информации о направлении луча, содержащейся в соответствующем файле карты лучей, для гарантии того, что интерполяцию выполняют между точками на одной и той же ветви поверхности времен пробега; (g) повторяют операцию (f) для каждой трассы в трехмерном массиве сейсмических данных; и (h) выполняют миграцию сейсмических данных с использованием интерполированных значений времени пробега и амплитуд лучей. Краткое описание чертежей В дальнейшем изобретение поясняется приведенным ниже подробным описанием со ссылками на сопроводительные чертежи, на которых фиг. 1 изображает схему многолучевого распространения вблизи от солевой массы; фиг. 2 - сформированный компьютером набор траекторий лучей от одиночного пункта взрыва в сложной формации, где скорость распространения обозначена цветом согласно изобретению; фиг. 3 - фронт волны, исходящей из того же самого пункта взрыва, что и на фиг. 2, в некоторый момент времени согласно изобретению; фиг. 4 - схему последовательности операций способа, выполняемых в одном из вариантов осуществления согласно изобретению; фиг. 5 А - процесс интерполяции в одном из вариантов осуществления способа согласно изобретению; фиг. 5 Б - различные ветви поверхности времен пробега, вызванные многолучевым распространением согласно изобретению; фиг. 6 - способ разделения общих глубинных площадок по углу согласно изобретению; фиг. 7 А - результаты построения изображений солевой массы с использованием известных способов без учета многолучевого распространения; фиг. 7 Б - изображение той же самой формации солевой массы, построенное с использованием заявленного способа на основе алгоритма МОУО (CRAM); фиг. 8 - геометрическая конфигурация для миграции на основе общего угла отражения (МОУО(CRAM, согласно изобретению; фиг. 9 А и фиг. 9 Б - схему облучения подсолевой структуры, выраженную через направление наклона в трехмерном пространстве, для оценки достоверности конкретной точки изображения отражающей границы согласно изобретению. Подробное описание предпочтительных вариантов осуществления изобретения Ниже приведено описание изобретения применительно к предпочтительным вариантам его осуществления. Однако, поскольку приведенное ниже подробное описании отражает специфику конкретного варианта осуществления изобретения или конкретного варианта использования настоящего изобретения,то подразумевают, что оно приведено только лишь в иллюстративных целях, и его не следует истолковывать как ограничивающее объем патентных притязаний настоящего изобретения. Наоборот, подразу-3 008733 мевают, что оно охватывает собой все возможные альтернативные варианты, модификации и эквиваленты, не выходящие за пределы сущности и объема настоящего изобретения, которые определены прилагаемой формулой изобретения. В некоторых вариантах осуществления изобретения заявленный способ содержит следующие признаки: Построение изображений при многолучевом распространении; Получение на выходе сейсмических данных с общим углом отражения; Введение в значения амплитуды поправки на сферическое расхождение; Построение изображений, ориентированное на объект разведки; Последовательное считывание данных из файла исходных данных на диске, при этом карты лучей хранят в кэш-памяти. Результатом является компьютеризированный способ, обеспечивающий построение изображений с программно контролируемой амплитудой для полных наборов трехмерных данных. Эскиз основного механизма многолучевого распространения представлен на фиг. 1. Изображенные траектории лучей вносят вклад в изображение в точке 12 изображения. Из теоретических основ известно,что наиболее существенный вклад вносят те лучи, угол которых является наиболее близким к углу зеркального отражения в точке изображения для заданных мест расположения источника и приемника. На чертеже изображены следующие лучи: одиночный прямой луч 15, соединяющий точку 12 изображения на отражающей границе, являющейся объектом разведки, с приемником 11 на поверхности, и набор из трех траекторий лучей, соединяющих точку изображения с точкой 13 расположения источника на поверхности. Этими тремя траекториями лучей являются: прямой луч 16, луч 17, отраженный от соли, и луч 18 преломленной волны, прошедшей через соль. При обычном построении изображений по алгоритму Кирхгофа для формирования изображения обычно выбирают прямой луч 16, поскольку он имеет самое короткое время пробега и наибольшую амплитуду. Однако в этой конкретной конфигурации более важным является отраженный луч 17, так как он является более близким к идеальному отражению от отражающей границы, являющейся объектом разведки. Многолучевое распространение для реалистичной модели скоростей показано на фиг. 2, где показаны смоделированные траектории лучей, все из которых исходят из одного пункта взрыва ( 141) в подземной структуре, характеризующейся большим диапазоном изменения скорости акустической волны. На черно-белом представлении цветной диаграммы затемненные места отображают разности в скорости. Области 21 и 22, в которых скорость является самой высокой, представляют собой солевые отложения. Траектория луча полностью определяется углом, под которым он выходит из пункта взрыва, и распределением скоростей во всей среде, в которой он проходит. Зная распределение скоростей, может быть вычислено время пробега для энергии сейсмических волн, проходящих вдоль траектории луча. Явление многолучевого распространения проиллюстрировано путем сравнения трех траекторий лучей, отмеченных фигурной скобкой. Первый луч отражается в точке линии, перпендикулярной профилю, с координатой, приблизительно равной 185, и возвращается обратно вверх к приемнику, расположенному в точке с координатой, приблизительно равной 106. Эту траекторию следует сравнить с еще двумя обычными траекториями лучей, которые отмечены скобкой в точке изображения с координатой 185 и достигают сейсмоприемников в точках с координатами 219 и 270. Предполагают, что эти лучи имеют аналогичные траектории, которые, хотя и не показаны на чертеже, претерпевают отражение в точке изображения с координатой 185 почти так же, как и упомянутая траектория первого луча, но проходят по весьма иному пути. На фиг. 3 показана та же самая подземная структура, на которой черными линиями показаны волновые фронты. После отражения гипотетической отражающей границей на глубине 7300 метров у фронта волны возникло несколько "петель", каждая из которых содержит энергию, обусловленную многолучевым распространением, а для правильного построения изображения требуется программа построения изображений при многолучевом распространении. Желательно построить изображение по набору сейсмических данных таким образом, чтобы отражающие границы были явно расположены на правильных глубинах и не были размытыми вследствие того, что при многолучевом распространении волны приходят в одну и ту же точку изображения в разное время. Специалистам в данной области техники понятно, что желательное построение изображений может быть выполнено в том случае, если известны следующие величины: время пробега, амплитуда,фаза и начальное направление луча. Амплитуда является не амплитудой сейсмических данных, а мерой относительной величины энергии, проходящей по конкретной траектории луча. Соотношение между амплитудой для одной траектории луча и амплитудой для другой траектории луча зависит от соответствующих значений длины пути и сред, через которые они проходят. В однородной среде в качестве амплитуды для заданной траектории луча может быть использована величина, обратная длине пути между точкой изображения и местоположением либо источника, либо приемника, в зависимости от обстоятельств. Однако общий объем данных в заранее вычисленных картах времени пробега, амплитуды, фазы и направления луча, необходимых для трехмерной миграции, является очень большим, и для типичного-4 008733 набора трехмерных сейсмических данных потребовался бы объем памяти компьютера свыше 100 терабайт. Настоящее изобретение обеспечивает решение этой проблемы за счет интерполяции карты с редкой сетки на более частую сетку во время процесса миграции. Карты построены на редких сетках поверхности и изображения. В предпочтительных вариантах осуществления настоящего изобретения каждая карта выходных данных содержит, как минимум, время пробега, амплитуду луча, коэффициент КМАН (необходимый для получения правильной фазы при построении изображений с учетом многолучевого распространения), а также три направляющих косинуса (или эквивалентные единицы измерения направления) для конкретного луча в обеих точках: в точке поверхности и в точке изображения (то есть,направление выхода луча в ячейке на поверхности и направление прихода луча в ячейке изображения). Возможен вариант создания изображения с использованием меньшего количества информации о луче. Например, возможен вариант, в котором коэффициент КМАН не используют. Однако в большинстве случаев это привело бы к получению худшего изображения. В качестве другого примера, предложенный в настоящем изобретении способ может быть использован без амплитуд траектории луча. Построение карты может быть выполнено, например, посредством имеющейся в продаже компьютерной программы "NORSAR-3D" (адрес Web-узла в Интернет: www.norsar.com), предназначенной для моделирования путем трассировки лучей, которая может вычислять все вышеупомянутые параметры,необходимые для создания карты лучей. Заданная ячейка на редкой сетке поверхности может быть соединена с заданной ячейкой на редкой сетке изображения нулем траекторий лучей, одной траектории луча или множеством траекторий лучей. Некоторые траектории лучей из группы, состоящей из множества траекторий лучей, могут быть физически незначащими с точки зрения относительной величины энергии, распространяющейся по ним. Те траектории, амплитуды которых являются более низкими, чем предоставленное пользователем пороговое значение, могут не учитываться для повышения эффективности вычислительных операций. При условии наличия этого ограничения, осуществляют построение карты лучей (обозначенной в схеме последовательности операций на фиг. 4 шаг 30) для каждой траектории луча и для каждой ячейки на поверхности (или для каждой ячейки, которая содержит точку расположения источника или интересующее местоположение приемника), и для каждой ячейки изображения (в пределах объема, являющегося желательным объектом разведки). В схеме последовательности операций,иллюстрирующей вариант осуществления настоящего изобретения, в котором использована компьютерная программа "NORSAR-3D", построение карты выполняют на шаге 31. Карты лучей хранят на дисках компьютера. Поскольку карты соответствуют редким сеткам, то они занимают объем памяти порядка сотен гигабайтов по сравнению с объемом памяти в сто или более терабайтов, который потребовался бы в том случае, если бы не была осуществлена дискретизация областей поверхности и изображения на ячейки. В предпочтительных вариантах осуществления настоящего изобретения выполняют предварительную обработку карт (шаг 33), чтобы они включали в себя область 32 изображения, являющуюся объектом разведки, для подтверждения мест расположения источников на поверхности и для обеспечения статистической информации, полезной для миграции, например, максимального размера карты и диапазона амплитуд в данных о лучах. Может быть осуществлена генерация вспомогательного файла 34, который содержит таблицу мест на диске, в которых расположены начальные точки данных о каждом уровне по глубине для каждой карты. Предыдущие действия выполняют в качестве подготовки к миграции сейсмических данных (построению изображений). Прямоугольники, расположенные ниже и слева от пунктирных линий на фиг. 4,предназначены для отображения предварительных операций. На остальной части фиг. 4 изображены операции миграции данных. В процессе миграции на шаге 35 считывания карты в предпочтительном варианте создают индексы для того, чтобы обеспечить возможность компактного хранения и эффективного извлечения данных о лучах при многолучевом распространении. Для каждой точки в изображении эти индексы могут содержать, например, количество лучей, идущих в эту точку, и положение первого луча в перечне всех лучей для карты. Этот способ является компактным, поскольку в нем сохраняют информацию только для реальных лучей, не выделяя дополнительный объем памяти для множества возможных лучей, которые часто отсутствуют. Эффективность достигнута за счет использования индекса вместо поиска конкретных координат х, у, z в перечне. Эти индексы могут иметь такой же размер, как и сами перечни, и, следовательно, не являться заранее вычисленными. В варианте осуществления изобретения, в котором использованы карты компьютерной программы"NORSAR-3D", существенное увеличение быстродействия может быть достигнуто при считывании карт(на шагах 33 и 35). Вместо использования программы, предоставленной поставщиком, для извлечения данных об одиночном луче может быть осуществлено гибкое и эффективное извлечение всех данных о лучах для карты непосредственно из входного буфера посредством соответствующего построения индексов массива и осторожной организации циклов. Таким образом, данные для многих лучей извлекают путем однократного вызова подпрограммы, а не путем отдельных вызовов для каждого луча. Построение изображения осуществляют из ячеек, заданных на редкой сетке подземной среды, которая может быть приведена к требуемому размеру (например, 4x4x8), соответствующему конечной более частой сетке изображения в направлениях х, у, z. Каждая ячейка помечена амплитудами, коэффициентами КМАН и значениями угла наклона в точке поверхности и в точке изображения, выведенными из-5 008733 результатов трассировки лучей на редкой сетке. Это дает возможность осуществлять оперативную линейную интерполяцию значений времени пробега с использованием информации об угле наклона как для точек на поверхности, так и для точек изображения. В каждом конце каждого луча, то есть, в области ячейки на поверхности, а также в области ячейки изображения, выполняют отдельные интерполяции. Например, каждая ячейка имеет представляющую точку, которая может являться или может не являться геометрическим центром ячейки. В предпочтительном варианте представляющая точка выбрана таким образом, что совпадает с узловой точкой мелкомасштабной сетки. Для заданной трассы время пробега,полученное из соответствующей карты лучей, равно времени пробега от представляющей точки в ячейке на поверхности до представляющей точки в ячейке изображения. Для корректировки времени пробега между ячейками для конкретной траектории луча до точных мест расположения внутри ячеек для пункта взрыва (или приемника) и для точки изображения используют интерполяцию. В некоторых вариантах осуществления настоящего изобретения это делают путем выхода за пределы представляющей точки ячейки. На фиг. 5 А показано, каким образом выполняют интерполяцию в картах времени пробега в одном из вариантов осуществления настоящего изобретения. Для простоты и ясности чертеж изображен двумерным, однако, та же самая логика применима и для трехмерного случая. Рассмотрим две возможные траектории 51 и 53 лучей, соединяющих точку 52 на поверхности с соответствующими точками 54 и 56 изображения, лежащими на фронтах, соответственно, 55 и 57 волны. Фронты 55 и 57 волны распространяются в направлении траекторий лучей, при этом они характеризуются тем, что каждая точка на фронте волны имеет одинаковое время пробега от точки 52 расположения источника. В однородной среде (с постоянной скоростью) фронты волны являются сферическими. На фиг. 3 показано, что фронты волны для различных траекторий лучей могут быть похожими на фронты волны в реалистичной среде. Рассмотрим время пробега от точки 52 на поверхности до точки 56 изображения на частой сетке, отстоящей от точки 54 на редкой сетке на расстояние Разность значений времени пробега между этими двумя фронтами волны, обозначенная как t1, может быть найдена путем линейной экстраполяции от точки 54 с использованием градиента поверхности 55 времен пробега в точке 54. Это применимо вне зависимости от того, является ли поверхность времени пробега однолучевой или многолучевой, та как точки 54 и 56 лежат на одной и той же ветви поверхности времен пробега. Например, на фиг. 3 это означает, что точки должны лежать на одной и той же дуге фронта волны, не будучи разделенными точкой острого перегиба. На чертеже фиг. 5 Б показано многолучевое распространение для набора реальных сейсмических данных в Мексиканском заливе. На чертеже показан двумерный срез через трехмерную поверхность с множеством ветвей в трехмерном пространстве. Изображенный фронт волны разделен на три ветви точками 61 и 62 острого перегиба. При использовании обычных способов попытка интерполяции значений времени пробега, проиллюстрированных на чертеже, обычно приводит к интерполяции между различными ветвями. Например, попытка интерполяции между точками 63 и 65 на редкой сетке (которые обозначены кругами) фактически сводится к интерполяции между точкой 63 и любой из точек 64 или 65(номер следующей общей глубинной площадки вдоль профиля), что приводит к недопустимой погрешности. Предложенный в настоящем изобретении способ обеспечивает решение этой проблемы за счет экстраполяции от узловых точек редкой сетки с использованием информации об угле наклона, запомненной для каждой узловой точки редкой сетки. Точки между кругами иллюстрируют успешную интерполяцию таким способом, то есть за счет предотвращения смешения различных ветвей графика времени пробега. Как упомянуто выше, при обработке трехмерных сейсмических данных значения времени пробега образуют в трехмерном пространстве сложную поверхность с множеством ветвей. Предложенный в настоящем изобретении способ применим как для двумерных, так и для трехмерных случаев. Предпочтительным уравнением линейной интерполяции является следующее: где t- малое изменение времени пробега;- произвольное малое смещение в трехмерном про странстве;- вектор наклона в точке равный градиенту фронта волны. Так как направление луча и скорость распространения сейсмических волн являются известными в каждой точке изображения, то угол наклона также задан. (Вектор наклона представляет собой вектор в направлении луча, имеющий абсолютную величину 1/, где- скорость в рассматриваемой точке). Интерполяция в пределах ячейки на поверхности (шаг 42 на фиг. 4) на фиг. 5 не проиллюстрирована, но концепция является той же самой. В некоторых вариантах осуществления настоящего изобретения также имеется схема кэширования(шаг 36 на фиг. 4), предназначенная для считывания карт с диска, чтобы надлежащим образом упорядоченный доступ к данным, упорядоченным по взрывам, мог свести к минимуму повторное считывание карт с диска. Результирующее влияние такой структуры программы состоит в том, что в течение большей части времени выполнения программы обеспечивают эффективное хранение карт в кэш-памяти, при этом данные считывают последовательно, а обращение к каждой трассе осуществляют только один раз. Считывание каждой сейсмической трассы 37 с передачей данных в рабочее запоминающее устрой-6 008733 ство выполняют один раз на шаге 38. Шаг 38 может содержать вычисление отфильтрованных трасс для подавления помех в ядре и вычисление преобразований Гильберта от трасс, необходимых в том случае,когда коэффициент КМАН не равен нулю. Сведения об углах ориентации луча позволяют выполнять сглаживающую фильтрацию для подавления помех из-за дискретизации как в данных, так и в операторе. Способ, который может быть использован, представляет собой обобщенный вариант способа, предложенного Греем (Gray) в статье "Frequency-selective design of the Kirchhoff migration operator", GeophysicalProspecting 40, 565-571 (1992). Из массива отфильтрованных трасс, вычисленных заранее при считывании трассы, выбирают (посредством заранее вычисленной таблицы индексов фильтра) правильно отфильтрованный вариант трассы, вносящей вклад в каждую точку изображения. Для каждой трассы известны места расположения источника и приемника. Для каждой желательной точки изображения обращаются (шаг 39) к соответствующим картам, поэтому углы выхода на поверхности и углы прихода в точке изображения являются доступными для всех лучей, соединяющих источник и приемник с точкой изображения. Обращение к картам в этом варианте осуществления изобретения осуществляют попарно: к одной карте для луча, проходящего от источника до точки изображения, и к другой карте для луча, проходящего от точки изображения до приемника. Для специалиста в данной области техники очевидно, что из соображений обратимости, карта лучей для луча, начинающегося в определенной ячейке на поверхности и заканчивающегося в определенной ячейке изображения, содержит ту же самую информацию, что и карта луча, начинающегося в этой ячейке изображения и проходящего по той же самой траектории в обратном направлении к той же самой ячейке на поверхности. Таким образом, для каждой траектории от источника до точки изображения и от точки изображения до приемника необходима только одна карта лучей. Углы прихода в точке изображения позволяют определить угол отражения, и, следовательно, данные о трассе после миграции могут быть помещены в общую глубинную площадку 41 с надлежащим углом. В варианте осуществления настоящего изобретения (фиг. 4) миграцию,обозначенную прямоугольником 40, выполняют с использованием алгоритма МОУО (CRAM). После миграции всех данных получают объем 41 с одним общим углом для каждой общей глубинной площадки, расположенной под углом к лучу. В частности, в варианте осуществления настоящего изобретения(фиг. 4) интерполяцию ячеек изображения выполняют в ядре 40 миграции. Таким образом, процесс миграции вводит различные поправки в величину времени пробега для каждой различной траектории из группы траекторий при многолучевом распространении, обеспечивая, тем самым, построение изображения единственной точки отражающей границы. Ниже приведено краткое описание последовательности операций для ядра 40 миграции в одном из вариантов осуществления настоящего изобретения, хотя специалистам в данной области техники известны другие варианты. В ядро вводят данные сейсмической трассы после фильтрации, выполненной на шаге 38, а также отфильтрованные преобразования Гильберта от сейсмических трасс, проиндексированные фильтром. Затем для каждой плоскости ячеек изображения выполняют следующие операции: выполняют цикл компьютерных вычислений по плоскости х-у изображения на выбранной редкой сетке. В цикле х-у цикл вычислений выполняют по множеству вступлений волны из местоположения источника и из местоположения приемника. Для каждой операции в этих двух циклах вычисляют угол наклона и угол отражения с использованием карты. Выполняют проверку для определения того, находится ли угол наклона в пределах заранее выбранной угловой апертуры, и находится ли угол отражения в пределах заранее выбранного диапазона углов; в противном случае эти данные отвергают. Суммируют значения времени пробега для лучей, проходящих от источника и приемника в одном направлении, односторонние в одном направлении, и эту сумму сверяют с предварительно заданным предельным значением, при этом данные для значений времени больших, чем предельное значение, отвергают. Как упомянуто выше, в обеих ячейках, т.е. в ячейке изображения подземной среды и в ячейке на поверхности, производят интерполяцию значений времени пробега в одном направлении с использованием информации об угле наклона, содержащейся в файлах карты. Индекс фильтра подавления помех из-за дискретизации выбирают с использованием информации об угле наклона для точки на поверхности и точки изображения, полученной из карт лучей. Суммируют коэффициенты КМАН для луча, проходящего от источника до изображения, и для луча, проходящего от точки изображения до приемника, для определения суммарной фазы. Точное значение используемого угла сдвига фазы равно произведению -/2 на суммарный коэффициент КМАН. Коэффициент КМАН используют для выбора (с использованием заранее вычисленной таблицы) правильного варианта (также заранее вычисленного) входной трассы со сдвигом фазы. Коэффициенты КМАН описаны Чепменом и Драммондом (Chapman and Drummond) в статье "Body-Waveof America, 72, S277-S317 (1982). Используемый здесь термин "коэффициент КМАН" содержит любой иной способ выражения или сбора эквивалентной информации. Вычисляют весовой коэффициент контролируемой амплитуды, и вычисляют весовой коэффициент пропорционального вклада в каждую соседнюю общую глубинную площадку, расположенную под углом к лучу. На данном этапе все параметры, необходимые для того, чтобы охарактеризовать заданную ячейку изображения, уже были определены. В пределах заданной ячейки изображения производят линейную интерполяцию времени пробега на все точки объема ячейки. Цикл компьютерных вычислений выполня-7 008733 ют по точкам x-y-z на более частой сетке изображения внутри ячейки изображения. В каждой точке в этом цикле вычисляют относительный сдвиг по времени в пределах ячейки с использованием информации об угле наклона, полученной из карт лучей на редкой сетке, и вычисляют выходные данные с взвешенным сдвигом по времени с использованием фазы и индексов фильтра для каждого местоположения внутри ячейки изображения. Эффективность доступа к запоминающему устройству может быть повышена за счет запоминания всех точек изображения для ячейки изображения в смежном блоке, причем срезы блоков изображения по горизонтали на отдельные уровни по глубине производят только при окончательной записи на диск. Приведенное описание операции миграции является ее кратким изложением. Многие из упомянутых аспектов представляют собой стандартные операции обработки, которые известны для специалиста в данной области техники. Более полное описание этих операций здесь не приведено. Повышение быстродействия за счет использования множества устройств обработки данных может быть легко достигнуто путем разделения пространства выходного изображения на срезы в любом из направлений главной оси. Каждый срез содержит одну или большее количество плоскостей выходного трехмерного сейсмического изображения. Уже были рассмотрены варианты осуществления изобретения,в которых разделение состоит из интервалов глубин. В качестве другого примера, каждому устройству обработки данных может быть выделен набор, состоящий из одного или из большего количества продольных сейсмических профилей. Каждое устройство обработки данных считывает все трассы, но использует только ту часть карт, которая соответствует выделенной ему части выходного изображения, то есть, только те соответствующие сегменты карт, которые распределены для локального диска или запоминающего устройства каждого устройства обработки данных. В одном из вариантов осуществления изобретения, в котором используют большое количество устройств обработки данных, объединенных в одну группу, данные сейсмической трассы разделяют на части в соответствии с количеством устройств обработки данных, так что каждое устройство обработки данных обрабатывает одну часть разделенных данных, хранящихся на его локальном диске. "Разделение на части" определено таким образом, что обеспечивает "выравнивание нагрузки", распределение приблизительно равных объемов работы каждому устройству обработки данных. Выходное изображение вычисляют по продольным профилям (или по поперечным профилям), по одному или по нескольким одновременно в зависимости от ограничений объема памяти устройства обработки данных, при этом каждое устройство обработки данных создает в результате ту часть изображения, которая соответствует его части разделенных данных трассы. Окончательные изображения общей глубинной площадки, расположенной под углом к лучу, для набора продольных профилей или поперечных профилей создают путем суммирования вкладов от каждого устройства обработки данных перед переходом к следующему набору профилей. Обработка данных карт для этого альтернативного "группового" варианта осуществления изобретения содержит операцию разделения каждой карты на части, соответствующие наборам продольных профилей или поперечных профилей, подвергаемых обработке, и передачи этих частей в локальный диск каждого из устройств обработки данных. В этом варианте осуществления изобретения части карты для набора профилей повторно собирают в одну или несколько групп, обеспечивая, таким образом, возможность удобной и эффективной передачи нескольких достаточно больших файлов карты, а не тысяч малых файлов. Специалист в данной области техники способен легко разработать программное обеспечение для записи и считывания файлов карты, содержащих карты от множества взрывов, полученные посредством компьютерной программы "NORSAR-3D", которое предназначено специально для этой цели. Для предварительного изучения изображений также полезно произвести вычисление выходных изображений для выбранного подмножества продольных профилей или поперечных профилей. В некоторых вариантах осуществления настоящего изобретения для каждой точки изображения и для каждого луча, соединяющего источник и приемник с точкой изображения, из карт осуществляют доступ к данным об угле выхода луча и об угле прихода луча, поэтому углы отражения и наклона (соответственно,и ) определяют при помощи следующих уравнений:- единичные векторы, определяющие наклон лучей (направление лучей), соответственгде но, от источника и от приемника в точке изображения. В этом случае угол наклона представляет собой угол, который образует луч относительно вертикального направления. Угол отражения необходим для миграции данных с использованием алгоритма МОУО (CRAM). Часто желательно отказаться от данных,связанных с большими углами наклона. В некоторых вариантах осуществления настоящего изобретения осуществляют доступ к амплитуде каждого луча, поэтому весовой коэффициент, необходимый для сохранения амплитуды сейсмической волны, определяют при помощи следующего уравнения: весовой коэффициент = n1zn2zА 1 А 2,-8 008733 где А 1 и А 2 - амплитуды луча для лучей от источника до точки изображения и от точки изображения до приемника;-скорость в точке изображения. Теперь за счет процесса миграции был произведен сдвиг трассы по времени. Трассу со сдвигом по времени и с присвоенным весовым коэффициентом добавляют в изображение для соответствующей общей глубинной площадки, расположенной под углом к лучу. Возникновение шумов миграционного преобразования предотвращают за счет использования перекрывающихся общих глубинных площадок, расположенных под углом к лучу (фиг. 6). В этом случае каждая трасса вносит вклад в две соседние общие глубинные площадки, расположенные под углом к лучу, каждая из которых имеет соответствующий заранее весовой коэффициент, представленный в виде таблицы. Готовые части изображения повторно собирают в окончательное объемное выходное изображение для каждой общей глубинной площадки, расположенной под углом к лучу. Данные могут быть упорядочены в виде угловых сейсмограмм. Сейсмограмму обычно считают"плоской" в том случае, когда заданное сейсмическое явление возникает на постоянной глубине для имеющихся общих глубинных площадок, расположенных под углом к лучу. Путем проверки плоскостности этих сейсмограмм получают показатель точности модели скоростей. Путем видоизменения модели скоростей и повторной трассировки лучей можно попытаться улучшить плоскостность сейсмограмм и получить лучшее изображение путем дальнейшей миграции данных. Имеющиеся в сейсмических данных сведения об удалении (расстоянии между источником и приемником) могут быть отмечены в ядре миграции, и данные после миграции могут быть выведены в равноудаленные объемы. В альтернативном варианте в том случае, если все трассы сейсмических данных,вводимых в алгоритм МОУО (CRAM), имеют единое равное удаление, и использована единственная общая глубинная площадка, расположенная под углом к лучу, охватывающая весь ожидаемый диапазон углов отражения, то на выходе, согласно предложенному в настоящем изобретении способу, получают трехмерный массив сейсмических данных равного удаления, в котором было правильно учтено многолучевое распространение. В этом случае отсутствует необходимость вычисления угла отражения в ядре МОУО (CRAM). Такие трехмерные массивы сейсмических данных равного удаления могут быть удобными в некоторых случаях, например, при сопряжении с существующим программным обеспечением для создания модели скоростей, которое приспособлено для данных равного удаления. Такое программное обеспечение часто работает с сейсмограммами равных удалений, а не с угловыми сейсмограммами. Ключевым моментом изобретения является степень "крупнозернистости" области поверхности и области изображения или степень их дискретизации в сетку ячеек. Наличие редких сеток является главным фактором в обеспечении работоспособности алгоритма МОУО (CRAM) в трех измерениях в сложной формации, в которой наблюдается сильное многолучевое распространение. Если ячейки являются слишком большими, то интерполяция будет ненадежной, и ухудшится точность изображения. Если ячейки являются слишком малыми, то потребности в объеме памяти для хранения данных могут быть чрезмерными, и быстродействие алгоритма миграции, в общем случае, снизится. Отсутствует какой-либо один правильный ответ или диапазон крупности. Наилучший размер ячейки зависит от определяемого пользователем соотношения между конкурирующими факторами. Авторами настоящего изобретения установлено, что полезное эмпирическое правило состоит в том, что хорошие результаты дает соотношение между размерами ячейки и частой сетки (между расстояниями источник-приемник для поверхности и для желательной сетки изображения) в интервале не более, чем 4 на 6 на 8, и не менее, чем 3 на 4 на 8. Однако эти числа могут быть изменены для чрезвычайно сложных моделей скоростей. Эти цифры относятся, соответственно, к размерам по координатам х и у на поверхности, к размерам по координатам х и у в изображении и к размеру по координате z в изображении. Размер по координате z на поверхности не предложен, поскольку во многих прикладных задачах, в том числе, во всех прикладных задачах морской сейсморазведки, поверхность является достаточно плоской, и все места расположения источников и приемников для всех практических задач находятся в одной и той же плоскости, поэтому ячейки на поверхности могут представлять собой двумерные прямоугольники. Однако, для прикладных задач наземной сейсморазведки на холмистой территории это утверждение может оказаться несправедливым, и, следовательно, настоящее изобретение не ограничено двумерными ячейками на поверхности. Пример На фиг. 7 А и фиг. 7 Б представлены изображения разрезов, полученные заявленным способом, в котором использованы двумерные синтезированные данные. Модель охватывает интервал глубин 600022450 футов, и оба изображения представляют собой полные суммарные разрезы. Оба изображения были созданы с использованием точной модели скоростей, которая была использована для генерации входных сейсмических данных. На фиг. 7 А показано изображение, созданное известным способом путем суммирования равноудаленных изображений, полученных по алгоритму Кирхгофа, вышеописанным способом. Можно увидеть, что обычные способы, которые не обеспечивают надлежащий учет многолучевого распространения, создают плохие изображения отражающей границы под солевой массой 71 в правой части изображения, то есть ниже 17000 футов, и для трасс с более высокими номерами чем 450. На изображении, показанном на фиг.7 Б, генерация которого осуществлена заявленным способом с использованием алгоритма МОУО (CRAM), можно проследить отражающие границы под солевой массой. На фиг. 7 Б-9 008733 видно, что изображение границы солевого пласта построено лучше, и имеет место лучшее отношение сигнал/шум. Все эти результаты являются теми результатами, которые можно было бы ожидать от успешного способа построения изображений с учетом многолучевого распространения, который должен быть способен сосредотачивать больше энергии в сейсмических данных, чем однолучевой способ. Оценка достоверности данного трехмерного объема, полученного с использованием алгоритма МОУО (CRAM), может быть осуществлена описанным ниже способом. При наличии модели скоростей,карты лучей и сейсмических данных, алгоритм МОУО (CRAM) выполняют для одной или для большего количества точек изображения, представляющих интерес, но вместо вывода трехмерного массива сейсмических данных выводят, например, вычисленные углы наклона и угол отражения в каждой выбранной точке изображения. На фиг. 8 вектор 81 (обозначенный как ) представляет собой нормаль к отражающей поверхности в точке 82 изображения. В качестве направления наклона в конкретной точке изображения взято направление вектора 81 нормали, измеряемое полярным углом(на чертеже не показан) и азимутальным углом(на чертеже не показан). Вектор 81 наклона имеет следующие компоненты: определяет ориентацию плоскости, заданной Уголвокруг оси вращения, заданной вектором лучами в точке изображения. При формировании сейсмического изображения обычно производят суммирование по углу , что может быть реализовано путем его игнорирования в ядре. Однако, если в ядре вычисляют угол , то также существует возможность создания трехмерных массивов сейсмических данных, зависящих от обоих углов: от углаи от углаотражения. Источник расположен в точке S, а приемник расположен в точке R. Набор всех векторов угла наклона (фиг. 8) может быть представлен в виде графика в полярных координатах, на котором 9 является дополнением географической широты, аявляется долготой, что показано на фиг. 9 А и фиг. 9 Б. Для того чтобы в построенном изображении был возможен наклон отражающей границы в заданной точке изображения, угол наклона в построенном изображении должен находиться в области углов наклона, реально заполненной данными. На фиг. 9 А и фиг. 9 Б проиллюстрирован пример, взятый из реальных данных трехмерной сейсморазведки. При облучении(фиг. 9 А) наклонная отражающая граница 91 в построенном изображении имеет угол наклона, согласующийся с данными и с картами лучей, то есть она находится в облучаемой (затемненной на чертеже) области. При облучении (фиг. 9 Б) наклонная отражающая граница 92 в построенном изображении имеет угол наклона, не соответствующий данным и картам лучей. Приведенное выше описание заявки на изобретение ориентировано на описание конкретных вариантов осуществления настоящего изобретения для его пояснения. Однако для специалиста в данной области техники очевидно, что возможно множество модификаций и видоизменений описанных здесь вариантов осуществления изобретения. Подразумевают, что все подобные модификации и видоизменения не выходят за пределы объема патентных притязаний настоящего изобретения, который определяется прилагаемой формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Компьютеризированный способ построения изображений с управляемой амплитудой геологической формации, являющейся объектом разведки, в подземной области с использованием трехмерного массива сейсмических данных, полученных из подземной области, и известного распределения скоростей для этой подземной области, причем сейсмические данные содержат множество сейсмических трасс, каждая трасса имеет известное место расположения пункта взрыва и известное место расположения приемника, заключающийся в том, что(a) осуществляют дискретизацию трехмерного подземного пространства, содержащего формацию,являющуюся объектом разведки, с преобразованием в сетку ячеек, при этом каждая ячейка изображения содержит множество точек заранее выбранной сетки из точек трехмерного изображения, а размеры ячейки выбраны таким образом, чтобы обеспечить баланс между потребностями в объеме памяти для хранения данных и точностью построения изображения,(b) осуществляют дискретизацию поверхности над формацией, являющейся объектом разведки, с преобразованием в сетку ячеек, при этом размеры ячеек на поверхности выбирают в соответствии с расстояниями между пунктом взрыва и приемниками, чтобы обеспечить баланс между потребностями в объеме памяти для хранения данных и точностью построения изображения,(c) вычисляют файлы карты лучей, исходя из информации о распределении скоростей, при этом упомянутые файлы представляют все физически значимые траектории лучей, соединяющие представляющую точку в ячейке на поверхности с представляющей точкой в ячейке изображения, с использованием распределения скоростей в подземной области для определения траекторий лучей, причем упомянутые файлы карты лучей содержат, по меньшей мере, время пробега от ячейки на поверхности до ячейки изображения, направление выхода луча из каждой ячейки на поверхности и направление прихода луча- 10008733 в каждую ячейку изображения, упомянутые направления заданы в трехмерном пространстве,(d) повторяют операцию (с) для каждой ячейки на поверхности и для каждой ячейки изображения,(e) сохраняют файлы карты лучей в запоминающем устройстве компьютера,(f) выполняют интерполяцию значений времени пробега из файлов карты лучей, упомянутые интерполированные значения времени представляют собой значения времени пробега от конкретных мест расположения пункта взрыва и приемников, связанных с одной трассой сейсмических данных, до каждой узловой точки на сетке из точек изображения для каждой упомянутой физически значимой траектории луча, соединяющей их, а для выполнения операции интерполяции выполняют интерполяцию представляющей точки ячейки на поверхности, расположенной вблизи от каждого конкретного места расположения пункта взрыва и каждого конкретного места расположения пункта приема, выполняют интерполяцию представляющей точки ячейки изображения, расположенной вблизи от каждой точки на сетке изображения, при этом упомянутые операции интерполяции реализованы с использованием информации о направлении луча, содержащейся в соответствующем файле карты лучей, для гарантии того, что интерполяцию выполняют между точками на одной и той же ветви поверхности времен пробега,(g) повторяют операцию (f) для каждой трассы в трехмерном массиве сейсмических данных, и(h) выполняют миграцию сейсмических данных с использованием интерполированных значений времени пробега и амплитуд лучей. 2. Способ по п.1, отличающийся тем, что каждая карта лучей, хранящаяся в запоминающем устройстве компьютера, построена в виде компактного перечня лучей, эффективный доступ к которому осуществляют по индексу, созданному при считывании карты из диска. 3. Способ по п.1, отличающийся тем, что при выполнении операции (f) интерполяции используют следующее уравнение: где t- малое изменение времени пробега,- произвольное малое смещение в трехмерном про странстве,- вектор наклона в точке 4. Способ по п.1, отличающийся тем, что файлы карты лучей также содержат относительную амплитуду каждой траектории луча, при этом траектория луча является физически значимой в том случае,если соответствующая ей амплитуда является большей, чем заранее установленное значение. 5. Способ по п.1, отличающийся тем, что трехмерное пространство подземной среды, содержащее формацию, являющуюся объектом разведки, делят на срезы, которые перпендикулярны одной из координатных осей x-y-z, обработку каждого среза поручают отдельному устройству обработки данных, а соответствующие сегменты карт лучей распределяют по локальным запоминающим устройствам каждого устройства обработки данных. 6. Способ по п.5, отличающийся тем, что срезами являются интервалы глубин. 7. Способ по п.5, отличающийся тем, что срезами являются наборы продольных профилей. 8. Способ по п.5, отличающийся тем, что срезами являются наборы поперечных профилей. 9. Способ по п.1, отличающийся тем, что информацией о направлении выхода лучей и о направлении прихода лучей в файлах карты лучей являются три направляющих косинуса в ортогональной декартовой системе координат (х, у, z). 10. Способ по п.1, отличающийся тем, что данные для файлов карты лучей вычисляют с использованием программного продукта "NORSAR-3D". 11. Способ по п.10, отличающийся тем, что производят анализ файлов карты лучей, созданные программой "NORSAR-3D", для извлечения статистических данных и информации о месте расположения данных для конкретных областей, являющихся объектом разведки, в этих файлах. 12. Способ по п.1, отличающийся тем, что определяют углы прихода лучей в точку изображения для каждой трассы, и трассы разделяют на общие глубинные площадки с общим углом отражения, и используют алгоритм миграции на основе общего угла отражения для миграции сейсмических данных по общей глубинной площадке. 13. Способ по п.12, отличающийся тем, что уголотражения определяют из уравнения и- единичные векторы, определяющие наклон лучей (направление лучей), соответственно, от где источника и от приемника в точке изображения. 14. Способ по п.1, отличающийся тем, что соотношения между размерами ячейки относительно более мелкой сетки точек изображения и расстояниями от источника до приемника не больше, чем 42 на 62 на 8 и не меньше, чем 32 на 42 на 8, при этом упомянутые цифры относятся, соответственно, к размерам по координатам х и у на поверхности, к размерам по координатам х и у в изображении и к размеру по координате z в изображении. 15. Способ по п.1, отличающийся тем, что все сейсмические трассы имеют равное удаление. 16. Способ по п.1, отличающийся тем, что для выбора из массива отфильтрованных трасс в зависимости от углов наклона в подземной среде и на поверхности используют заранее вычисленную таблицу- 11008733 индексов фильтра. 17. Способ по п.1, отличающийся тем, что точки изображения для ячейки изображения запомнены в смежном блоке данных, при этом впоследствии производят срезы блоков по горизонтали на отдельные уровни по глубине. 18. Способ по п.1, отличающийся тем, что также вычисляют коэффициент КМАН (огибающую), запоминают его в файлах карты лучей и используют при операции миграции. 19. Способ по п.1, отличающийся тем, что вычисленные амплитуды траекторий лучей используют для вычисления весовых коэффициентов для сохранения амплитуд сейсмической волны при операции миграции. 20. Способ по п.1, отличающийся тем, что дополнительно распределяют данные сейсмических трасс из трехмерного массива сейсмических данных по множеству различных компьютерных устройств обработки данных для выполнения способа построения изображений с контролируемой амплитудой, а затем суммируют готовые вклады от различных устройств обработки данных для формирования выходного изображения. 21. Способ по п.20, отличающийся тем, что выходное изображение вычисляют для заранее выбранного подмножества плоскостей вдоль профиля или поперек профиля. 22. Способ по п.20, отличающийся тем, что данные для файлов карты лучей вычисляют с использованием программного продукта "NORSAR-3D", и из полных карт извлекают и передают в упомянутое множество устройств обработки данных только те данные карты, которые соответствуют наборам плоскостей вдоль профиля или поперек профиля. 23. Способ по п.10, отличающийся тем, что дополнительно считывают данные для множества лучей из карты лучей для выполнения операций интерполяции значений времени пробега за один вызов подпрограммы непосредственно из входного буфера. 24. Способ по п.1, отличающийся тем, что дополнительно оценивают достоверность упомянутых сейсмических данных после миграции с использованием вычисленных углов наклона и углов отражения из файлов карты лучей для выбранных точек изображения, при этом направление наклона каждой выбранной точки изображения представляют в виде графика в полярных координатах, и производят сравнение точек на графике с теми областями графика в полярных координатах, которые имеют наклон и которые заполнены сейсмическими данными. 25. Способ по п.1, отличающийся тем, что файлы карты лучей также содержат относительную амплитуду каждой траектории луча.
МПК / Метки
МПК: G01V 1/00
Метки: сложных, формациях, геологических, способ, сейсморазведочных, построений
Код ссылки
<a href="https://eas.patents.su/16-8733-sposob-sejjsmorazvedochnyh-postroenijj-v-slozhnyh-geologicheskih-formaciyah.html" rel="bookmark" title="База патентов Евразийского Союза">Способ сейсморазведочных построений в сложных геологических формациях</a>
Способ загрузки сырья при получении сложных полиэфиров и сополимеров сложных полиэфиров

Номер патента: 7623
Опубликовано: 29.12.2006
Авторы: Жанко Луц, Кирстен Клаус, Деисс Стефан, Рау Майк
МПК: G05D 11/13, B01J 19/00, B01J 19/18...
Метки: сложных, загрузки, получении, способ, сырья, полиэфиров, сополимеров
Формула / Реферат:
1. Способ получения пасты для изготовления сложного полиэфира из твердого и жидкого сырья с возможным введением добавок, отличающийся тем, что скорость загрузки твердого сырья регулируют по замкнутому циклу на основании отклонения плотности получаемой пасты от заданного значения. 2. Способ по п.1, отличающийся тем, что плотность пасты используют в качестве базового параметра для регулирования молярного соотношения по замкнутому циклу. 3. Способ...
Способ построения трехмерных геологических моделей с регулируемыми геологическими поверхностями раздела
Номер патента: 3475
Опубликовано: 26.06.2003
Авторы: Джоунс Томас А., Калверт Крэйг С.
МПК: G06F 19/00
Метки: трехмерных, геологических, построения, способ, геологическими, поверхностями, регулируемыми, раздела, моделей
Формула / Реферат:
1. Способ построения трехмерной геологической модели объема среды нижних горизонтов, содержащей одну или несколько геологических поверхностей раздела, заключающийся в том, что a) генерируют пробную геологическую модель объема среды нижних горизонтов, которая содержит трехмерный массив прилегающих модельных блоков, каждому из которых присвоены пробные значения одного или нескольких свойств породы, а пробная геологическая модель содержит пробные...
Способ и устройство для испытаний на приток и определения свойств предположительно проницаемых геологических пластов
Номер патента: 1119
Опубликовано: 30.10.2000
Автор: Войе Руне
МПК: E21B 49/00
Метки: способ, предположительно, определения, приток, устройство, испытаний, проницаемых, геологических, свойств, пластов
Формула / Реферат:
1. Способ для использования в связи с предположительно проницаемым первым геологическим пластом (4), в котором в процессе испытаний на приток пластовый флюид от указанного пласта подвергается измерению давления, среди прочих параметров, и регулированию расхода, отличающийся тем, что устанавливают, по меньшей мере, один определенный канал (8) гидравлического сообщения между указанным предположительно проницаемым первым пластом (4) и вторым...
Способ получения сложных алкиловых эфиров 3-пентеновой кислоты
Номер патента: 280
Опубликовано: 25.02.1999
Авторы: Шнайдер Регина, Ланггут Эрнст, Липперт Фердинанд, Хён Артур
МПК: C07C 67/36
Метки: сложных, алкиловых, кислоты, способ, 3-пентеновой, эфиров, получения
Формула / Реферат:
1. Способ получения сложных алкиловых эфиров 3-пентеновой кислоты путем карбонилирования алкоксибутенов в среде растворителя в присутствии катализатора на основе благородного металла при повышенной температуре и под давлением, отличающийся тем, что используют смесь алкоксибутенов с 1-10 атомами углерода, включающую транс- и цис-изомеры, которую подвергают взаимодействию с окисью углерода при температуре от 60 до 140°С и парциальном давлении...
Способ и устройство для получения твердофазных поликонденсированных сложных полиэфиров
Номер патента: 6050
Опубликовано: 25.08.2005
Авторы: Отто Бригитта, Альсхаймер Герд, Райтц Ганс
МПК: B29B 13/02, C08G 63/80, B01J 19/18...
Метки: устройство, твердофазных, способ, получения, поликонденсированных, сложных, полиэфиров
Формула / Реферат:
1. Способ получения сложных полиэфиров, включающий кристаллизацию материала сложного полиэфира, отличающийся тем, что кристаллизацию проводят в две стадии, в которых получают на первой стадии частично кристаллический материал сложного полиэфира, на второй стадии обеспечивают протекание частично кристаллического материала сложного полиэфира при температурах, подходящих для кристаллизации (i) при механическом возмущении и газе в противотоке, (ii)...
Предыдущий патент: Дозатор жидкости автоматический
Следующий патент: Игровой автомат
Случайный патент: Комплект деталей для настенного монтажа по меньшей мере одного модульного электрического устройства