Инструмент для применения в эндоскопии

Формула / Реферат
1. Инструмент для применения в эндоскопии, содержащий трубкообразное звено, имеющее управляемый концевой участок, исполнительный концевой участок, содержащий исполнительное средство, и продольные элементы (22-26, 34-36), предусмотренные для передачи движения исполнительного средства на управляемый концевой участок для изменения его ориентации, при этом трубкообразное звено выполнено из наружного защитного цилиндрического элемента (4), внутреннего защитного цилиндрического элемента (1) и первого (2) и второго (3) промежуточных цилиндрических элементов, расположенных между внутренним (1) и наружным (4) защитными цилиндрическими элементами, причем каждый один из указанных первого (2) и второго (3) промежуточных цилиндрических элементов содержит один набор продольных элементов (22-26, 34-36), а исполнительное средство на исполнительном концевом участке содержит трубкообразную секцию, содержащую первую (59) и вторую (56) гибкие исполнительные зоны и первую (60) и вторую (58) жесткие исполнительные зоны, причем указанные гибкие (59, 56) и жесткие (60, 58) исполнительные зоны размещены в чередующемся порядке, при этом управляемый концевой участок имеет первую (52) и вторую (54) независимые гибкие управляемые зоны и первую (51) и вторую (53) жесткие управляемые зоны, причем указанные гибкие (52, 54) и жесткие (51, 53) управляемые зоны размещены в чередующемся порядке; причем количество гибких исполнительных зон (59, 56) равно количеству независимых гибких управляемых зон (52, 54), при этом первая жесткая исполнительная зона (60) и первая жесткая управляемая зона (51) соединены посредством первого набора продольных элементов, которые предусмотрены для воздействия на изменение ориентации первой независимой гибкой управляемой зоны (52), а вторая жесткая исполнительная зона (58) и указанная вторая жесткая управляемая зона (53) соединены посредством второго набора продольных элементов, которые предусмотрены для воздействия на изменение ориентации второй независимой гибкой управляемой зоны (54).
2. Инструмент по п.1, в котором указанная трубкообразная секция исполнительного средства имеет диаметр, который отличается от диаметра остального трубкообразного звена.
3. Инструмент по п.1 или 2, в котором у управляемого концевого участка наружный защитный цилиндрический элемент (4) содержит первое жесткое кольцо (41), указанный второй промежуточный цилиндрический элемент (3) расположен смежно с наружным защитным цилиндрическим элементом (4), где указанный второй промежуточный цилиндрический элемент (3) содержит первое жесткое кольцо (31), соединенное с первой стороной первого гибкого участка (32), и дополнительно содержит второе жесткое кольцо (33), соединенное со второй стороной первого гибкого участка (32), причем второе жесткое кольцо (33) на другой стороне соединено со вторым гибким участком (34) второго промежуточного цилиндрического элемента (3), при этом указанное второе жесткое кольцо (33) также соединено с указанным первым жестким кольцом (41) наружного защитного цилиндрического элемента (4), причем указанный первый промежуточный цилиндрический элемент (2) расположен между указанным вторым промежуточным цилиндрическим элементом (3) и внутренним защитным цилиндрическим элементом (1), при этом первый промежуточный цилиндрический элемент (2) содержит первое жесткое кольцо (21), соединенное с одной стороной с первым гибким участком (22), при этом первое жесткое кольцо (21) также соединено с первым жестким кольцом (31) второго промежуточного цилиндрического элемента (3).
4. Инструмент по п.3, в котором внутренний защитный цилиндрический элемент (1) содержит первое внутреннее жесткое кольцо (11), соединенное с первым внутренним гибким участком (12) внутреннего защитного цилиндрического элемента (1) и с указанным первым жестким кольцом (21) первого промежуточного цилиндрического элемента (2).
5. Инструмент по п.4, в котором продольные элементы каждого одного из первого и второго наборов продольных элементов параллельны друг другу и расположены на равном расстоянии по периферии указанных первого промежуточного цилиндрического элемента (2) и второго промежуточного цилиндрического элемента (3) соответственно.
6. Инструмент по п.5, в котором количество продольных элементов каждого одного из первого и второго наборов продольных элементов первого промежуточного цилиндрического элемента (2) и второго промежуточного цилиндрического элемента (3) равно по меньшей мере трем.

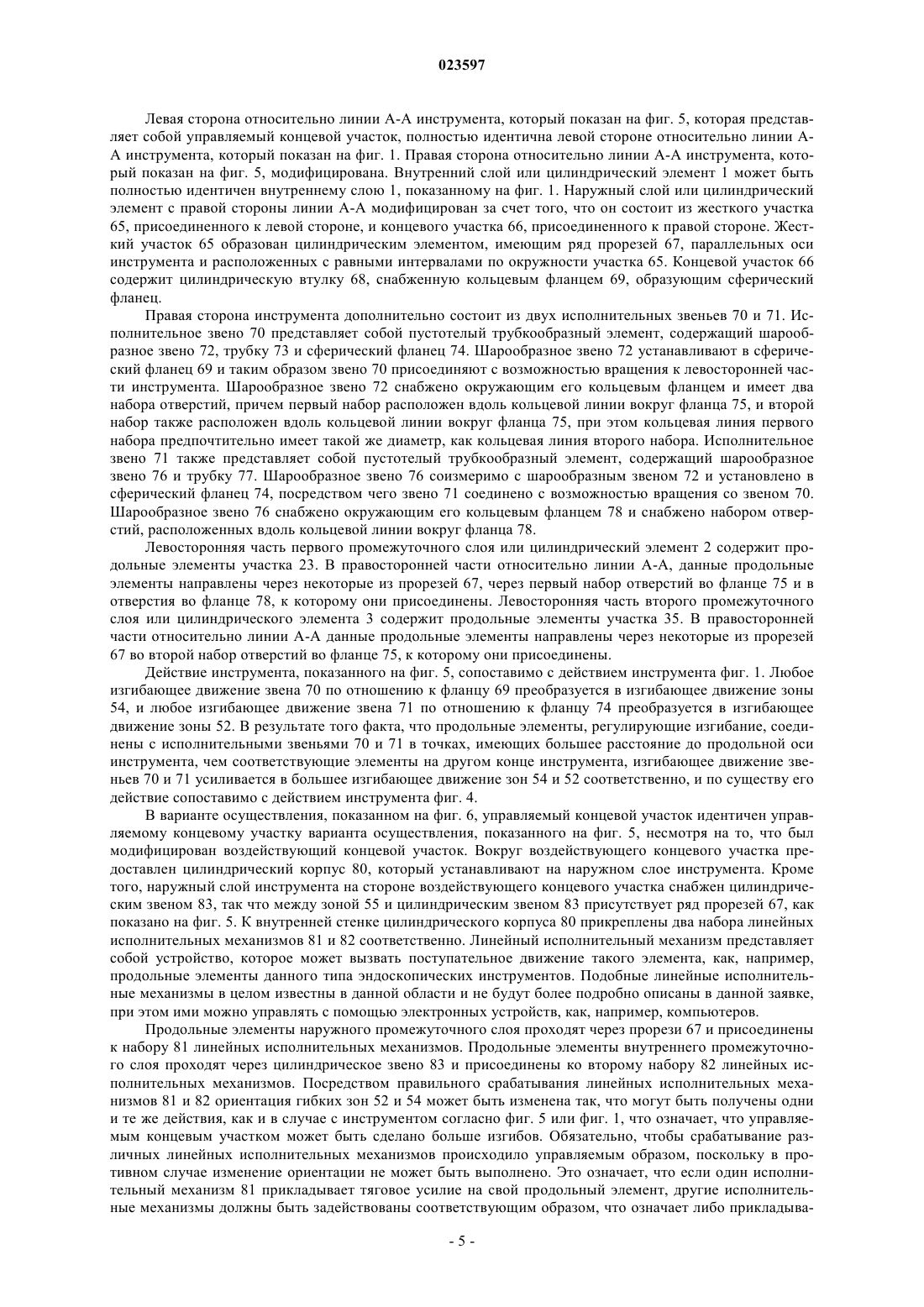
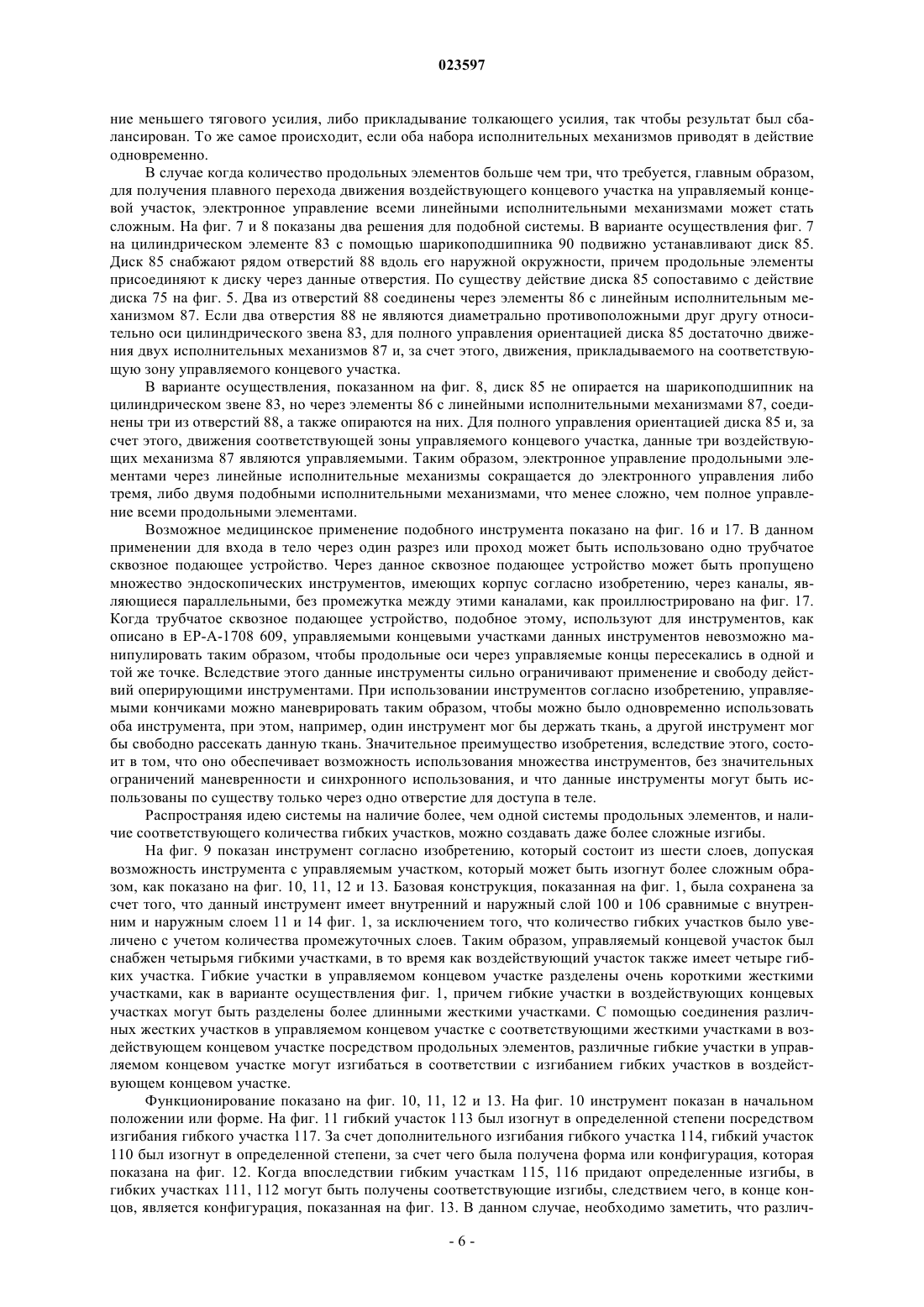
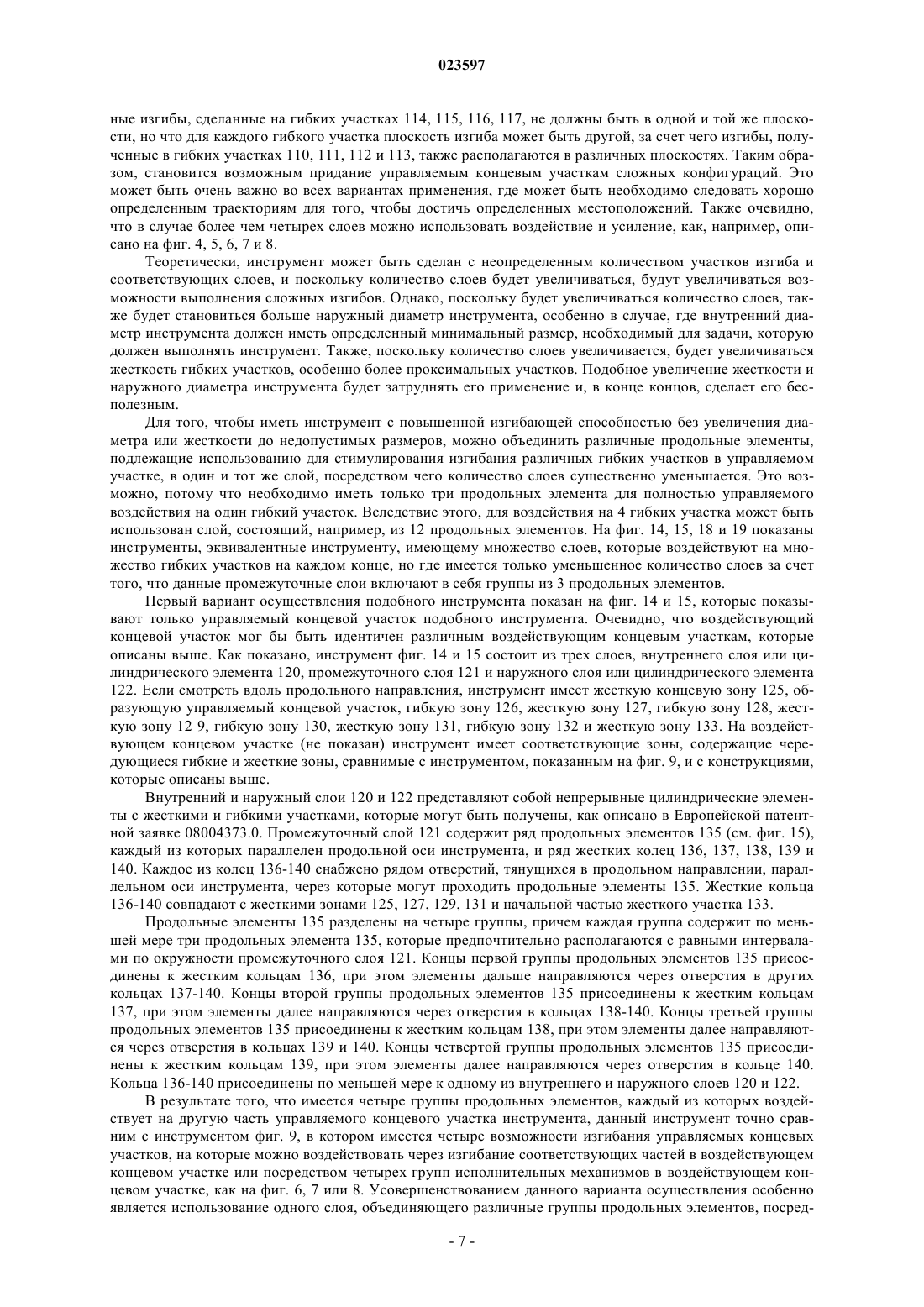
Текст
ИНСТРУМЕНТ ДЛЯ ПРИМЕНЕНИЯ В ЭНДОСКОПИИ Инструмент для применения в эндоскопии и т.п., содержащий трубкообразное звено, имеющее управляемый концевой участок, имеющий гибкий участок (52, 54), и исполнительное средство,расположенное на другом концевом участке (56, 59), и продольные элементы для передачи движения исполнительного средства на управляемый концевой участок, следствием чего является изменение его ориентации, при этом управляемый концевой участок содержит по меньшей мере два независимых гибких участка, при этом исполнительный концевой участок имеет соответствующее количество исполнительных средств и каждое исполнительное средство соединено посредством своего собственного набора продольных элементов с частью управляемого концевого участка для воздействия на изменение ориентации одного из гибких участков. Вербек Марсель Антониус Элизабет Изобретение относится к инструменту для применения в эндоскопии или т.п., содержащему трубкообразное звено, имеющее управляемый концевой участок, имеющий гибкий участок, и исполнительное средство, расположенное на другом концевом участке, и продольные элементы для передачи движения исполнительного средства на управляемый концевой участок, следствием чего является изменение его ориентации. Из ЕР-А-1708609 известен подобный инструмент, который, как правило, используется для такого способа применения, как миниинвазивная хирургия, но также может быть использован для других целей,как, например, проверки или ремонта механических или электронных установок в труднодоступных местоположениях. В данном известном инструменте изгибающее движение воздействующего концевого участка передается на управляемый концевой участок посредством продольных элементов, следствием чего является соответствующее изгибающее движение управляемого концевого участка, особенно гибкой его части. В результате данной конструкции ориентация изгиба гибкого участка одновременно ограничена одним направлением, в результате чего применение данного типа инструмента ограничено. Это особенно справедливо в ситуациях, где параллельным образом используют два эндоскопических инструмента, расположенных бок о бок, поскольку в данной ситуации невозможно направлять управляемый концевой участок в одну и ту же точку по причине взаимного сферического препятствия. Кроме того, не всегда возможно использовать инструмент в определенных местоположениях по причине некоторых затруднений,имеющихся на пути доступа в точку, где необходимо какое-либо действие. Более конкретно существует потребность в инструменте для применения в эндоскопии и т.п., который предлагает расширенные возможности для направления управляемого концевого участка инструмента. Вследствие этого задача изобретения состоит в том, чтобы предоставить инструмент вышеназванного типа, который избегает указанных выше проблем и предлагает более разносторонние возможности применения. Данная и другие задачи решаются за счет того, что управляемый концевой участок содержит по меньшей мере два независимых гибких участка и исполнительный концевой участок имеет соответствующее количество исполнительных средств, и при этом каждое исполнительное средство соединено посредством своего собственного набора продольных элементов с частью управляемого концевого участка для воздействия на изменение ориентации одного из гибких участков. В результате того, что управляемый концевой участок включает по меньшей мере два независимо управляемых гибких участка, становится возможным обеспечивать более сложные изгибы, предоставляющие возможность лучшего доступа к трудным местам, и более разностороннее использование инструмента. Например, в случае двух гибких участков в управляемом концевом участке можно получитьS-образные изгибы, обеспечивающие возможность параллельного использования эндоскопического инструмента при приближении к одной и той же точке операции. Согласно настоящему изобретению инструмент для применения в эндоскопии содержит трубкообразное звено, имеющее управляемый концевой участок, исполнительный концевой участок, содержащий исполнительное средство, и продольные элементы, предусмотренные для передачи движения исполнительного средства на управляемый концевой участок для изменения его ориентации, при этом трубкообразное звено выполнено из наружного защитного цилиндрического элемента, внутреннего защитного цилиндрического элемента и первого и второго промежуточных цилиндрических элементов, расположенных между внутренним и наружным защитными цилиндрическими элементами, причем каждый один из указанных первого и второго промежуточных цилиндрических элементов содержит один набор продольных элементов, а исполнительное средство на исполнительном концевом участке содержит трубкообразную секцию, содержащую первую и вторую гибкие исполнительные зоны и первую и вторую жесткие исполнительные зоны, причем указанные гибкие и жесткие исполнительные зоны размещены в чередующемся порядке, при этом управляемый концевой участок имеет первую и вторую независимые гибкие управляемые зоны и первую и вторую жесткие управляемые зоны, причем указанные гибкие и жесткие управляемые зоны размещены в чередующемся порядке; причем количество гибких исполнительных зон равно количеству независимых гибких управляемых зон, при этом первая жесткая исполнительная зона и первая жесткая управляемая зона соединены посредством первого набора продольных элементов, которые предусмотрены для воздействия на изменение ориентации первой независимой гибкой управляемой зоны и второй жесткой исполнительной зоны, и указанная вторая жесткая управляемая зона соединена посредством второго набора продольных элементов, которые предусмотрены для воздействия на изменение ориентации второй независимой гибкой управляемой зоны. Предпочтительно указанная трубкообразная секция исполнительного средства имеет диаметр, который отличается от диаметра остального трубкообразного звена. Предпочтительно у управляемого концевого участка наружный защитный цилиндрический элемент содержит первое жесткое кольцо, указанный второй промежуточный цилиндрический элемент расположен рядом с наружным защитным цилиндрическим элементом, при этом указанный второй промежуточный цилиндрический элемент содержит первое жесткое кольцо, соединенное с первой стороной первого гибкого участка, и дополнительно содержит второе жесткое кольцо, соединенное со второй стороной первого гибкого участка, причем второе жесткое кольцо (33) соединено на другой стороне со вторым гибким участком второго промежуточного цилиндрического элемента, при этом указанное второе жесткое кольцо также соединено с указанным первым жестким кольцом наружного защитного цилиндрического элемента, причем указанный первый промежуточный цилиндрический элемент расположен между указанным вторым промежуточным цилиндрическим элементом и внутренним защитным цилиндрическим элементом, при этом первый промежуточный цилиндрический элемент содержит первое жесткое кольцо, соединенное с одной стороной с первым гибким участком, при этом первое жесткое кольцо также соединено с первым жестким кольцом второго промежуточного цилиндрического элемента. Внутренний защитный цилиндрический элемент содержит первое внутреннее жесткое кольцо, соединенное со своим первым внутренним гибким участком внутреннего защитного цилиндрического элемента и с указанным первым жестким кольцом первого промежуточного цилиндрического элемента. Предпочтительно продольные элементы каждого одного из первого и второго наборов продольных элементов параллельны друг другу и расположены на равном расстоянии по периферии указанных первого промежуточного цилиндрического элемента и второго промежуточного цилиндрического элемента соответственно. Количество продольных элементов каждого одного из первого и второго наборов продольных элементов первого промежуточного цилиндрического элемента и второго промежуточного цилиндрического элемента равно по меньшей мере трем. Другие отличия и преимущества изобретения станут понятны из следующего описания со ссылкой,сделанной на приложенные чертежи. На чертежах фиг. 1 представляет собой схематичное изображение поперечного сеченияинструмента согласно изобретению; фиг. 2 представляет собой схематичное изображение поперечного сечения инструмента фиг. 1, показывающее первую стадию его работы; фиг. 3 представляет собой схематичное изображение поперечного сечения инструмента фиг. 1, показывающее вторую стадию его работы; фиг. 4 представляет собой схематичное изображение поперечного сечения, показывающее ссылаясь на фиг. 1 модифицированный вариант осуществления инструмента согласно изобретению; фиг. 5 представляет собой схематичное изображение поперечного сечения, показывающее, ссылаясь на фиг. 4, модифицированный вариант осуществления инструмента согласно изобретению; фиг. 6 представляет собой схематичное изображение поперечного сечения, показывающее, ссылаясь на фиг. 4 и 5, модифицированный вариант осуществления инструмента согласно изобретению; фиг. 7 представляет собой перспективное изображение воздействующего механизма, подлежащего использованию в инструменте согласно изобретению; фиг. 8 представляет собой перспективное изображение модифицированного варианта осуществления воздействующего механизма, подлежащего использованию в инструменте согласно изобретению; фиг. 9 представляет собой схематичное изображение поперечного сечения варианта осуществления инструмента согласно изобретению, имеющего четырехуровневую систему управления; фиг. 10 представляет собой схематичное изображение инструмента согласно фиг. 9 в нейтральном положении; фиг. 11 представляет собой схематичное изображение инструмента согласно фиг. 9 с активированным одним уровнем системы управления; фиг. 12 представляет собой схематичное изображение инструмента согласно фиг. 9 с активированными двумя уровнями системы управления; фиг. 13 представляет собой схематичное изображение инструмента согласно фиг. 9 с активированными всеми четырьмя уровнями системы управления; фиг. 14 представляет собой схематичное перспективное изображение части инструмента согласно изобретению с четырьмя уровнями срабатывания, в котором четыре уровня расположены внутри одного и того же слоя или цилиндрического элемента; фиг. 15 представляет собой схематичное перспективное изображение инструмента фиг. 14 с удаленной частью наружного слоя или цилиндрического элемента; фиг. 16 представляет собой схематичный чертеж возможного применения инструмента в области эндоскопии; фиг. 17 представляет собой поперечное сечение по линии XVII-XVII на фиг. 16; фиг. 18 представляет собой схематичное перспективное изображение части инструмента согласно изобретению с восемью уровнями срабатывания, в котором четыре уровня расположены в первом слое или цилиндрическом элементе, а четыре оставшихся уровня расположены в другом слое или цилиндрическом элементе; фиг. 19 представляет собой схематичное перспективное изображение инструмента фиг. 18 с удаленной частью наружного слоя или цилиндрического элемента; фиг. 20 А, 20 В, 20 С и 20D представляют собой схематичные изображения применения эндоскопического инструмента согласно изобретению; а фиг. 21 А, 21 В, 21 С и 21D представляют собой схематичные изображения модифицированного варианта осуществления при применении эндоскопического инструмента согласно изобретению. Инструмент, который показан на приложенных чертежах, может быть использован для медицинского применения в эндоскопии, но его использование этим не ограничивается, поскольку его можно использовать в других областях применения, например в области технического применения для манипулирования или наблюдения за частями машин или установок, которые труднодостижимы иным образом. Эндоскопический инструмент, который использован в данном описании, будет включать также такие области применения. Инструмент, который показан на фиг. 1, содержит четыре слоя или цилиндрических элемента, первый внутренний слой или цилиндрический элемент 1, второй промежуточный слой или цилиндрический элемент 2, третий промежуточный слой или цилиндрический элемент 3 и четвертый наружный слой или цилиндрический элемент 4, причем четыре элемента 1, 2, 3 и 4 являются коаксиальными и окружают друг друга, как показано. Первый внутренний слой или цилиндрический элемент 1, если смотреть вдоль его длины, состоит из первого жесткого кольца 11, которое представляет собой управляемый концевой участок, что означает, что данный участок используют в отдаленном месте, которое трудно достижимо для выполнения какого-либо действия, первого гибкого участка 12, первого промежуточного жесткого участка 13, второго гибкого участка 14, второго промежуточного жесткого участка 15, третьего гибкого участка 16 и второго жесткого концевого участка 17, который используют в качестве исполнительного (воздействующего) концевого участка инструмента, что означает, что данный концевой участок используют для управления движением другого концевого участка 11. Первый или внутренний промежуточный слой или цилиндрический элемент 2, если смотреть вдоль его продольного направления, состоит из первого жесткого кольца 21, первого гибкого участка 22, первого промежуточного жесткого участка 23, второго гибкого участка 24, второго промежуточного жесткого участка 25, третьего гибкого участка 26 и второго жесткого концевого участка 27. Продольный размер первого жесткого участка 21, первого гибкого участка 22, первого промежуточного жесткого участка 23,второго гибкого участка 24, второго промежуточного жесткого участка 25, третьего гибкого участка 26 и второго жесткого концевого участка 27 приблизительно равен продольному размеру первого жесткого участка 11, первого гибкого участка 12, первого промежуточного жесткого участка 13, второго гибкого участка 14, второго промежуточного жесткого участка 15, третьего гибкого участка 16 и второго жесткого концевого участка 17 соответственно, а также совпадают с данными участками. Второй промежуточный слой или цилиндрический элемент 3, если смотреть вдоль его продольного направления, состоит из первого жесткого кольца 31, первого гибкого участка 32, второго жесткого кольца 33, гибкого участка 34, первого промежуточного жесткого участка 35, первого промежуточного гибкого участка 36, второго промежуточного жесткого участка 37, второго промежуточного гибкого участка 38 и второго жесткого концевого участка 39. Продольная длина первого жесткого концевого участка 31, первого гибкого участка 32 вместе со вторым жестким кольцом 33 и вторым гибким участком 34,первого промежуточного жесткого участка 35, первого промежуточного гибкого участка 36, второго промежуточного жесткого участка 37, второго промежуточного гибкого участка 38 и второго жесткого концевого участка 39 приблизительно равна продольному размеру первого жесткого кольца 11, первого гибкого участка 12, первого промежуточного жесткого участка 13, второго гибкого участка 14, второго промежуточного жесткого участка 15, гибкого участка 16 и второго жесткого концевого участка 17 соответственно, а также совпадают с данными участками. Четвертый наружный цилиндрический элемент 4, если смотреть вдоль его продольного направления, состоит из первого жесткого кольца 41, первого гибкого участка 42, первого промежуточного жесткого участка 43, второго гибкого участка 44, второго жесткого кольца 45. Продольная длина первого гибкого участка 42, первого промежуточного жесткого участка 43 и второго гибкого участка 44 приблизительно равна продольному размеру второго гибкого участка 33, первого промежуточного жесткого участка 34 и первого промежуточного гибкого участка 35 соответственно, а также совпадают с данными участками. Жесткие кольца 41 и 4 5 могут иметь только очень ограниченную длину, при этом кольцо 41 имеет приблизительно такую же длину, как кольцо 33 и присоединено к нему, в то время как кольцо 45 простирается только поверх жесткого участка 37 с длиной достаточной для получения адекватного соединения между участками 45 и 37 соответственно. Торцевые поверхности жестких колец 11, 21 и 31 могут быть соединены друг с другом и это же относится к торцевым поверхностям концевых участков 17, 27 и 39. Внутренний и наружный диаметры цилиндрических элементов 1, 2, 3 и 4 выбирают таким образом,чтобы наружный диаметр элемента 1 был почти равен внутреннему диаметру элемента 2, наружный диаметр элемента 2 был почти равен внутреннему диаметру элемента 3, а наружный диаметр элемента был почти равен внутреннему диаметру элемента 4, так, чтобы было возможно скользящее движение соседних элементов друг относительно друга. Гибкие элементы 12, 42, 14, 44, 16 и 38 могут быть получены с помощью способов, описанных в Европейской патентной заявке 08004373.0, поданной 10.03.2008,страница 5, строки 15-26, но для создания гибких участков может быть использован любой другой под-3 023597 ходящий способ. Кроме этого, участки 22, 23, 24, 25, 26 и 34, 35, 36 сопоставимы с продольными элементами, описанными в упомянутой выше Европейской Патентной Заявке для передачи движения одного участка эндоскопического инструмента другому участку или кольцу. Согласно изобретению, может быть использован любой вариант осуществления, описанный в этой патентной заявке. Кроме этого, продольные элементы могут также быть получены с помощью любой другой системы, известной в данной области, такой как описана, например, в ЕР-А-1708609. Единственное подходящее ограничение в отношении конструкции продольных элементов, используемых в данных участках, состоит в том, что должна быть сохранена общая гибкость инструмента в тех местоположениях, где гибкие участки совпадают. Различные слои или цилиндрические элементы, которые описаны выше, могут быть получены посредством любых известных способов, при условии, что они подходят для создания многослойной системы. Под многослойной системой необходимо понимать эндоскопический инструмент, имеющий по меньшей мере две отдельные системы продольных элементов для передачи движения воздействующего концевого участка на управляемый участок. Сборка различных цилиндрических элементов также может быть выполнена таким же образом. Предпочтительные способы для получения различных цилиндрических элементов были описаны в упомянутой выше Европейской патентной заявке 080043730, поданной 10.03.2008, которая включена в данную заявку посредством ссылки. Использование выше описанной конструкции предоставляет возможность использования инструмента для двойного изгибания, как будет объяснено со ссылкой на фиг. 2 и 3. Для удобства, различные участки цилиндрических элементов были обозначены в соответствии с зонами 51-60, при этом зона 51 образована жесткими кольцами 11, 21 и 31. Зона 52 образована участком 32 и частями совпадающих с ним участков 12 и 22. Зона 53 образована кольцами 33 и 41 и частями совпадающих с ними участков 12 и 22. Зона 54 образована участками 34 и 42 и частями совпадающих с ними участков 12 и 22. Зона 55 образована участками 13, 23, 35 и 43. Зона 56 образована участками 14, 24, 36 и 44, зона 57 образована кольцом 45 и частью совпадающих с ним участков 15, 25 и 37. Зона 58 образована участком 37 и частью совпадающих с ним участков 15 и 25. Зона 59 образована участками 16, 26 и 38, а зона 60 образована участками 17, 27 и 39. Для управления управляемым концевым участком эндоскопического инструмента, который показан на фиг. 2, для того чтобы изогнуть зону 56, к зоне 58 можно прикладывать изгибающее усилие в любом радиальном направлении. Как показано, принимая во внимание соединение посредством продольных элементов, образованных участками 34, 35 и 36 между участком 37 и кольцом 33, данная деформация изгиба зоны 56 передается за счет продольного перемещения участка 35 в деформацию изгиба в зоне 54. Изгибание участка 24 и, вследствие этого, продольное перемещение участка 23, в результате изгибания зоны 56, полностью амортизируется за счет изгибания участка 22, где он совпадает с участком 33,и не будет, вследствие этого, вызывать какую-либо деформацию оставшегося участка 22, совпадающего с зоной 52. Когда впоследствии и как показано на фиг. 3, к зоне 60 в любом радиальном направлении прикладывают изгибающее усилие, посредством чего зона 59 изгибается, как показано, это будет вызывать изгибание зоны 52, являющееся следствием соединения посредством продольных элементов, образованных участками 22, 23, 24, 25 и 26 между кольцом 21 и участком 27. Первоначальное изгибание инструмента в зоне 54 будет сохраняться, потому что данное изгибание направляется зоной изгибания зоны 56. Вот почему на управляемом конце инструмента получают двойное изгибание, вызванное за счет отдельных изгибаний зон 52 и 54. Таким образом, становится возможно придать управляемому наконечнику инструмента положение и направление продольной оси, которые являются независимыми друг от друга. В известных инструментах, как например, описанных в ЕР-А-1708609, положение и направление продольной оси всегда сцеплены и не могут управляться по отдельности. Очевидно, можно изменять длину гибких участков для того, чтобы привести в соответствие с конкретными требованиями в отношении радиусов изгиба и общих длин управляемого конца и воздействующего конца или привести в соответствие с коэффициентами усиления между изгибанием воздействующего конца и управляемого конца. На фиг. 4 показан модифицированный вариант осуществления инструмента согласно изобретению. В данном варианте осуществления показан инструмент, имеющий четыре слоя, при этом, поскольку подобный инструмент соизмерим с инструментом по фиг. 1, но воздействующий участок цилиндрических элементов имеет больший диаметр по сравнению с управляемым концевым участком, в зону 56 была включена часть в форме усеченного конуса. В результате большего диаметра воздействующего участка движение управляемого участка будет усиливаться при изгибании, усиливая за счет этого движение управляемого наконечника. Также возможно работать в противоположном направлении с управляемым участком с большим диаметром, чем воздействующий участок, при этом степень подвижности уменьшается, улучшая за счет этого точность движения управляемого наконечника. На фиг. 5 показан вариант осуществления инструмента согласно изобретению, соизмеримому с инструментом, который показан на фиг. 4, в котором движение воздействующих участков усиливается в движение управляемого участка. В данном случае также показан инструмент, имеющий четыре слоя, как и инструмент на фиг. 1. Левая сторона относительно линии А-А инструмента, который показан на фиг. 5, которая представляет собой управляемый концевой участок, полностью идентична левой стороне относительно линии АА инструмента, который показан на фиг. 1. Правая сторона относительно линии А-А инструмента, который показан на фиг. 5, модифицирована. Внутренний слой или цилиндрический элемент 1 может быть полностью идентичен внутреннему слою 1, показанному на фиг. 1. Наружный слой или цилиндрический элемент с правой стороны линии А-А модифицирован за счет того, что он состоит из жесткого участка 65, присоединенного к левой стороне, и концевого участка 66, присоединенного к правой стороне. Жесткий участок 65 образован цилиндрическим элементом, имеющим ряд прорезей 67, параллельных оси инструмента и расположенных с равными интервалами по окружности участка 65. Концевой участок 66 содержит цилиндрическую втулку 68, снабженную кольцевым фланцем 69, образующим сферический фланец. Правая сторона инструмента дополнительно состоит из двух исполнительных звеньев 70 и 71. Исполнительное звено 70 представляет собой пустотелый трубкообразный элемент, содержащий шарообразное звено 72, трубку 73 и сферический фланец 74. Шарообразное звено 72 устанавливают в сферический фланец 69 и таким образом звено 70 присоединяют с возможностью вращения к левосторонней части инструмента. Шарообразное звено 72 снабжено окружающим его кольцевым фланцем и имеет два набора отверстий, причем первый набор расположен вдоль кольцевой линии вокруг фланца 75, и второй набор также расположен вдоль кольцевой линии вокруг фланца 75, при этом кольцевая линия первого набора предпочтительно имеет такой же диаметр, как кольцевая линия второго набора. Исполнительное звено 71 также представляет собой пустотелый трубкообразный элемент, содержащий шарообразное звено 76 и трубку 77. Шарообразное звено 76 соизмеримо с шарообразным звеном 72 и установлено в сферический фланец 74, посредством чего звено 71 соединено с возможностью вращения со звеном 70. Шарообразное звено 76 снабжено окружающим его кольцевым фланцем 78 и снабжено набором отверстий, расположенных вдоль кольцевой линии вокруг фланца 78. Левосторонняя часть первого промежуточного слоя или цилиндрический элемент 2 содержит продольные элементы участка 23. В правосторонней части относительно линии А-А, данные продольные элементы направлены через некоторые из прорезей 67, через первый набор отверстий во фланце 75 и в отверстия во фланце 78, к которому они присоединены. Левосторонняя часть второго промежуточного слоя или цилиндрического элемента 3 содержит продольные элементы участка 35. В правосторонней части относительно линии А-А данные продольные элементы направлены через некоторые из прорезей 67 во второй набор отверстий во фланце 75, к которому они присоединены. Действие инструмента, показанного на фиг. 5, сопоставимо с действием инструмента фиг. 1. Любое изгибающее движение звена 70 по отношению к фланцу 69 преобразуется в изгибающее движение зоны 54, и любое изгибающее движение звена 71 по отношению к фланцу 74 преобразуется в изгибающее движение зоны 52. В результате того факта, что продольные элементы, регулирующие изгибание, соединены с исполнительными звеньями 70 и 71 в точках, имеющих большее расстояние до продольной оси инструмента, чем соответствующие элементы на другом конце инструмента, изгибающее движение звеньев 70 и 71 усиливается в большее изгибающее движение зон 54 и 52 соответственно, и по существу его действие сопоставимо с действием инструмента фиг. 4. В варианте осуществления, показанном на фиг. 6, управляемый концевой участок идентичен управляемому концевому участку варианта осуществления, показанного на фиг. 5, несмотря на то, что был модифицирован воздействующий концевой участок. Вокруг воздействующего концевого участка предоставлен цилиндрический корпус 80, который устанавливают на наружном слое инструмента. Кроме того, наружный слой инструмента на стороне воздействующего концевого участка снабжен цилиндрическим звеном 83, так что между зоной 55 и цилиндрическим звеном 83 присутствует ряд прорезей 67, как показано на фиг. 5. К внутренней стенке цилиндрического корпуса 80 прикреплены два набора линейных исполнительных механизмов 81 и 82 соответственно. Линейный исполнительный механизм представляет собой устройство, которое может вызвать поступательное движение такого элемента, как, например,продольные элементы данного типа эндоскопических инструментов. Подобные линейные исполнительные механизмы в целом известны в данной области и не будут более подробно описаны в данной заявке,при этом ими можно управлять с помощью электронных устройств, как, например, компьютеров. Продольные элементы наружного промежуточного слоя проходят через прорези 67 и присоединены к набору 81 линейных исполнительных механизмов. Продольные элементы внутреннего промежуточного слоя проходят через цилиндрическое звено 83 и присоединены ко второму набору 82 линейных исполнительных механизмов. Посредством правильного срабатывания линейных исполнительных механизмов 81 и 82 ориентация гибких зон 52 и 54 может быть изменена так, что могут быть получены одни и те же действия, как и в случае с инструментом согласно фиг. 5 или фиг. 1, что означает, что управляемым концевым участком может быть сделано больше изгибов. Обязательно, чтобы срабатывание различных линейных исполнительных механизмов происходило управляемым образом, поскольку в противном случае изменение ориентации не может быть выполнено. Это означает, что если один исполнительный механизм 81 прикладывает тяговое усилие на свой продольный элемент, другие исполнительные механизмы должны быть задействованы соответствующим образом, что означает либо прикладыва-5 023597 ние меньшего тягового усилия, либо прикладывание толкающего усилия, так чтобы результат был сбалансирован. То же самое происходит, если оба набора исполнительных механизмов приводят в действие одновременно. В случае когда количество продольных элементов больше чем три, что требуется, главным образом,для получения плавного перехода движения воздействующего концевого участка на управляемый концевой участок, электронное управление всеми линейными исполнительными механизмами может стать сложным. На фиг. 7 и 8 показаны два решения для подобной системы. В варианте осуществления фиг. 7 на цилиндрическом элементе 83 с помощью шарикоподшипника 90 подвижно устанавливают диск 85. Диск 85 снабжают рядом отверстий 88 вдоль его наружной окружности, причем продольные элементы присоединяют к диску через данные отверстия. По существу действие диска 85 сопоставимо с действие диска 75 на фиг. 5. Два из отверстий 88 соединены через элементы 86 с линейным исполнительным механизмом 87. Если два отверстия 88 не являются диаметрально противоположными друг другу относительно оси цилиндрического звена 83, для полного управления ориентацией диска 85 достаточно движения двух исполнительных механизмов 87 и, за счет этого, движения, прикладываемого на соответствующую зону управляемого концевого участка. В варианте осуществления, показанном на фиг. 8, диск 85 не опирается на шарикоподшипник на цилиндрическом звене 83, но через элементы 86 с линейными исполнительными механизмами 87, соединены три из отверстий 88, а также опираются на них. Для полного управления ориентацией диска 85 и, за счет этого, движения соответствующей зоны управляемого концевого участка, данные три воздействующих механизма 87 являются управляемыми. Таким образом, электронное управление продольными элементами через линейные исполнительные механизмы сокращается до электронного управления либо тремя, либо двумя подобными исполнительными механизмами, что менее сложно, чем полное управление всеми продольными элементами. Возможное медицинское применение подобного инструмента показано на фиг. 16 и 17. В данном применении для входа в тело через один разрез или проход может быть использовано одно трубчатое сквозное подающее устройство. Через данное сквозное подающее устройство может быть пропущено множество эндоскопических инструментов, имеющих корпус согласно изобретению, через каналы, являющиеся параллельными, без промежутка между этими каналами, как проиллюстрировано на фиг. 17. Когда трубчатое сквозное подающее устройство, подобное этому, используют для инструментов, как описано в ЕР-А-1708 609, управляемыми концевыми участками данных инструментов невозможно манипулировать таким образом, чтобы продольные оси через управляемые концы пересекались в одной и той же точке. Вследствие этого данные инструменты сильно ограничивают применение и свободу действий оперирующими инструментами. При использовании инструментов согласно изобретению, управляемыми кончиками можно маневрировать таким образом, чтобы можно было одновременно использовать оба инструмента, при этом, например, один инструмент мог бы держать ткань, а другой инструмент мог бы свободно рассекать данную ткань. Значительное преимущество изобретения, вследствие этого, состоит в том, что оно обеспечивает возможность использования множества инструментов, без значительных ограничений маневренности и синхронного использования, и что данные инструменты могут быть использованы по существу только через одно отверстие для доступа в теле. Распространяя идею системы на наличие более, чем одной системы продольных элементов, и наличие соответствующего количества гибких участков, можно создавать даже более сложные изгибы. На фиг. 9 показан инструмент согласно изобретению, который состоит из шести слоев, допуская возможность инструмента с управляемым участком, который может быть изогнут более сложным образом, как показано на фиг. 10, 11, 12 и 13. Базовая конструкция, показанная на фиг. 1, была сохранена за счет того, что данный инструмент имеет внутренний и наружный слой 100 и 106 сравнимые с внутренним и наружным слоем 11 и 14 фиг. 1, за исключением того, что количество гибких участков было увеличено с учетом количества промежуточных слоев. Таким образом, управляемый концевой участок был снабжен четырьмя гибкими участками, в то время как воздействующий участок также имеет четыре гибких участка. Гибкие участки в управляемом концевом участке разделены очень короткими жесткими участками, как в варианте осуществления фиг. 1, причем гибкие участки в воздействующих концевых участках могут быть разделены более длинными жесткими участками. С помощью соединения различных жестких участков в управляемом концевом участке с соответствующими жесткими участками в воздействующем концевом участке посредством продольных элементов, различные гибкие участки в управляемом концевом участке могут изгибаться в соответствии с изгибанием гибких участков в воздействующем концевом участке. Функционирование показано на фиг. 10, 11, 12 и 13. На фиг. 10 инструмент показан в начальном положении или форме. На фиг. 11 гибкий участок 113 был изогнут в определенной степени посредством изгибания гибкого участка 117. За счет дополнительного изгибания гибкого участка 114, гибкий участок 110 был изогнут в определенной степени, за счет чего была получена форма или конфигурация, которая показана на фиг. 12. Когда впоследствии гибким участкам 115, 116 придают определенные изгибы, в гибких участках 111, 112 могут быть получены соответствующие изгибы, следствием чего, в конце концов, является конфигурация, показанная на фиг. 13. В данном случае, необходимо заметить, что различ-6 023597 ные изгибы, сделанные на гибких участках 114, 115, 116, 117, не должны быть в одной и той же плоскости, но что для каждого гибкого участка плоскость изгиба может быть другой, за счет чего изгибы, полученные в гибких участках 110, 111, 112 и 113, также располагаются в различных плоскостях. Таким образом, становится возможным придание управляемым концевым участкам сложных конфигураций. Это может быть очень важно во всех вариантах применения, где может быть необходимо следовать хорошо определенным траекториям для того, чтобы достичь определенных местоположений. Также очевидно,что в случае более чем четырех слоев можно использовать воздействие и усиление, как, например, описано на фиг. 4, 5, 6, 7 и 8. Теоретически, инструмент может быть сделан с неопределенным количеством участков изгиба и соответствующих слоев, и поскольку количество слоев будет увеличиваться, будут увеличиваться возможности выполнения сложных изгибов. Однако, поскольку будет увеличиваться количество слоев, также будет становиться больше наружный диаметр инструмента, особенно в случае, где внутренний диаметр инструмента должен иметь определенный минимальный размер, необходимый для задачи, которую должен выполнять инструмент. Также, поскольку количество слоев увеличивается, будет увеличиваться жесткость гибких участков, особенно более проксимальных участков. Подобное увеличение жесткости и наружного диаметра инструмента будет затруднять его применение и, в конце концов, сделает его бесполезным. Для того, чтобы иметь инструмент с повышенной изгибающей способностью без увеличения диаметра или жесткости до недопустимых размеров, можно объединить различные продольные элементы,подлежащие использованию для стимулирования изгибания различных гибких участков в управляемом участке, в один и тот же слой, посредством чего количество слоев существенно уменьшается. Это возможно, потому что необходимо иметь только три продольных элемента для полностью управляемого воздействия на один гибкий участок. Вследствие этого, для воздействия на 4 гибких участка может быть использован слой, состоящий, например, из 12 продольных элементов. На фиг. 14, 15, 18 и 19 показаны инструменты, эквивалентные инструменту, имеющему множество слоев, которые воздействуют на множество гибких участков на каждом конце, но где имеется только уменьшенное количество слоев за счет того, что данные промежуточные слои включают в себя группы из 3 продольных элементов. Первый вариант осуществления подобного инструмента показан на фиг. 14 и 15, которые показывают только управляемый концевой участок подобного инструмента. Очевидно, что воздействующий концевой участок мог бы быть идентичен различным воздействующим концевым участкам, которые описаны выше. Как показано, инструмент фиг. 14 и 15 состоит из трех слоев, внутреннего слоя или цилиндрического элемента 120, промежуточного слоя 121 и наружного слоя или цилиндрического элемента 122. Если смотреть вдоль продольного направления, инструмент имеет жесткую концевую зону 125, образующую управляемый концевой участок, гибкую зону 126, жесткую зону 127, гибкую зону 128, жесткую зону 12 9, гибкую зону 130, жесткую зону 131, гибкую зону 132 и жесткую зону 133. На воздействующем концевом участке (не показан) инструмент имеет соответствующие зоны, содержащие чередующиеся гибкие и жесткие зоны, сравнимые с инструментом, показанным на фиг. 9, и с конструкциями,которые описаны выше. Внутренний и наружный слои 120 и 122 представляют собой непрерывные цилиндрические элементы с жесткими и гибкими участками, которые могут быть получены, как описано в Европейской патентной заявке 08004373.0. Промежуточный слой 121 содержит ряд продольных элементов 135 (см. фиг. 15),каждый из которых параллелен продольной оси инструмента, и ряд жестких колец 136, 137, 138, 139 и 140. Каждое из колец 136-140 снабжено рядом отверстий, тянущихся в продольном направлении, параллельном оси инструмента, через которые могут проходить продольные элементы 135. Жесткие кольца 136-140 совпадают с жесткими зонами 125, 127, 129, 131 и начальной частью жесткого участка 133. Продольные элементы 135 разделены на четыре группы, причем каждая группа содержит по меньшей мере три продольных элемента 135, которые предпочтительно располагаются с равными интервалами по окружности промежуточного слоя 121. Концы первой группы продольных элементов 135 присоединены к жестким кольцам 136, при этом элементы дальше направляются через отверстия в других кольцах 137-140. Концы второй группы продольных элементов 135 присоединены к жестким кольцам 137, при этом элементы далее направляются через отверстия в кольцах 138-140. Концы третьей группы продольных элементов 135 присоединены к жестким кольцам 138, при этом элементы далее направляются через отверстия в кольцах 139 и 140. Концы четвертой группы продольных элементов 135 присоединены к жестким кольцам 139, при этом элементы далее направляются через отверстия в кольце 140. Кольца 136-140 присоединены по меньшей мере к одному из внутреннего и наружного слоев 120 и 122. В результате того, что имеется четыре группы продольных элементов, каждый из которых воздействует на другую часть управляемого концевого участка инструмента, данный инструмент точно сравним с инструментом фиг. 9, в котором имеется четыре возможности изгибания управляемых концевых участков, на которые можно воздействовать через изгибание соответствующих частей в воздействующем концевом участке или посредством четырех групп исполнительных механизмов в воздействующем концевом участке, как на фиг. 6, 7 или 8. Усовершенствованием данного варианта осуществления особенно является использование одного слоя, объединяющего различные группы продольных элементов, посред-7 023597 ством чего диаметр и гибкость инструмента фиг. 14 становятся меньше, чем у инструмента фиг. 9. На фиг. 18 и 19 показан инструмент, в котором принцип наличия более чем одной группы продольных элементов в одном слое, был использован для инструмента, который сопоставим с инструментом,имеющим восемь слоев продольных элементов для передачи изгибающего движения от воздействующего концевого участка на управляемый концевой участок. Фактически, инструмент фиг. 18 и 19 имеет два промежуточных слоя, каждый из которых содержит четыре группы продольных элементов. В управляемом концевом участке, показанном на фиг. 18 и 19, инструмент имеет восемь гибких зон 141-148 и девять кольцевых зон 14 9-157, образующих различные изгибающие зоны. Первые четыре гибкие зоны 141-144 управляются посредством продольных элементов, заключенных в первый или внутренний промежуточный слой, в то время как вторые четыре гибкие зоны 145-148 управляются посредством продольных элементов, заключенных во второй или наружный промежуточный слой. Инструмент имеет фактически пять слоев, внутренний непрерывный слой 160, первый или внутренний промежуточный слой 161, заключающий в себе первую группу продольных элементов, промежуточный непрерывный слой 162, второй наружный промежуточный слой 163, заключающий в себе вторую группу продольных элементов, и наружный непрерывный слой 164. Слои 160, 162 и 164 представляют собой стандартные слои или цилиндрические элементы, состоящие из гибкого и жесткого участков, как определено выше. Зоны 141-144 и 149-153 не должны быть окружены слоями 163 и 164, но могли бы быть окружены расширенными гибкими участками наружного слоя 164 для образования одинакового наружного диаметра. Воздействующий концевой участок может быть любой конструкции, которая описана выше, при условии, что количество воздействующих гибких зон соответствует количеству гибких зон управляемого конца. Действие данного варианта осуществления сопоставимо с инструментом, имеющим восемь слоев продольных элементов, что предполагает общее количество из десяти слоев. Вследствие комбинации четырех групп продольных элементов в каждом слое, количество слоев было уменьшено до пяти с соответствующим уменьшением диаметра и жесткости. Тем не менее, данный инструмент предоставляет возможность осуществления с помощью инструмента восьми одновременных, но независимых изгибающих действий, расширяя, за счет этого, возможности его использования без существенного увеличения диаметра и жесткости. Очевидно, что могут быть сделаны любые комбинации количеств слоев, продольных элементов на слой и количество продольных элементов на группу для получения оптимального решения для различных вариантов применения. На фиг. 16 и 17 показано, как инструмент согласно изобретению может быть использован общепринятым способом, в то время как проникновение в рабочую область может быть ограничено единственной трубчатой секцией. Это особенно важно в варианте применения, где объект, подлежащий обработке, может быть достигнут только одним единственным путем, как например в случае с рядом хирургических вмешательств. На фиг. 16 и 17 показана внешняя трубка 170, которую используют в качестве направляющей трубки для ряда эндоскопических инструментов. Внешняя трубка 170 содержит единую трубчатую секцию 171, которая тянется до линии В-В на фиг. 16. Выше данной линии внешняя трубка 170 состоит из центральной трубчатой секции 172 и двух разветвленных трубчатых секций 173 и 174, которые сливаются вместе на уровне линии В-В. Единая трубчатая секция 171 представляет собой часть внешней трубки,используемую для проникновения. В показанном варианте осуществления, во внешнюю трубку 170 вставлены пять эндоскопических инструментов, три через центральную трубчатую секцию 172 и по одному через каждую из разветвленных трубчатых секций 173, 174. Эндоскопический инструмент 175 представляет собой, например, трубку для наблюдения, в то время как эндоскопические инструменты 176 и 177 используют для подачи и/или отвода газов и/или жидкостей в намеченную область и из нее. Эндоскопические инструменты 178 и 179 имеют согласно изобретению множество возможностей ориентации и используются в качестве инструментов для выполнения некоторых действий в намеченной области. Для того, чтобы обеспечить доступ через разветвленные трубчатые секции 173 и 174, промежуточная зона трех инструментов между управляемым концевым участком и воздействующим концевым участком должна быть также гибкой, так чтобы они могли следовать изогнутому профилю разветвленных трубчатых секций. Принимая во внимание множество возможностей ориентации каждого из инструментов 178 и 179, становится возможным позволить данным инструментам работать в одном и том же месте в намеченной области, не создавая друг другу помех, как показано на фиг. 16. Наружная трубка 170 может представлять собой жесткую трубку, но также возможно использовать,по меньшей мере, для секции 171 гибкую трубку со множеством возможностей изгибания, сопоставимых с инструментом согласно изобретению. То жесамое относится к эндоскопическим инструментам 175,176 и 177. В показанном варианте осуществления они имеют форму жесткой трубки, но согласно изобретению это могут быть гибкие инструменты со множеством возможностей изгибания. На фиг. 20 и 21 схематично показаны два важных варианта применения инструмента согласно изобретению, в которых использовано множество возможностей ориентации. Общепринято, что инструмент 190 согласно изобретению следует вводить в систему 191 каналов, причем данная система очень чувствительна к контакту с инструментом или его частями, так что насколько возможно следует избегать кон-8 023597 такта между инструментом и стенками каналов. Подобная система каналов может иметься в человеческом теле, как например, в легком человека, но также это может быть технический инструмент с сенсорными компонентами, которые необходимо обслуживать. На фиг. 20 принимается, что геометрия системы 191 каналов уже была картирована с помощью средства воспроизведения изображений и сохранена в электронном устройстве 192. В систему 193 управления передается информация устройства 192, которую используют для определения ориентации различных зон управляемого концевого участка инструмента в любой момент, когда инструмент вводят в систему каналов. Вследствие этого, система 193 соединена с воздействующим концевым участком инструмента 190. Для безопасности система наблюдения также соединена с системой 193 управления, посредством чего можно отслеживать фактическую ситуацию на управляемом кончике инструмента. При введении инструмента в систему 191 каналов, фактическим положением управляемого кончика управляют на основании информации, хранящейся в устройстве 192, причем фактическим положением управляемого кончика ориентацией различных зон в управляемом концевом участке управляют таким образом, чтобы управляемый концевой участок инструмента точно следовал предварительно заданному маршруту через систему 191 каналов, такую как показана на фиг. 20 В, 20 С и 20D. Это может быть динамический процесс, в котором каждый раз, когда управляемый кончик продвигается дальше в системе каналов, ориентация различных зон управляемого концевого участка регулируется автоматически, за счет чего избегают контакта между инструментом и стенками канала. В варианте осуществления, показанном на фиг. 21, принимается, что система 191 каналов не была картирована и сохранена. В данной ситуации управляемым кончиком следует управлять посредством системы 194 наблюдения. С этой целью предоставлен рычаг управления 195, посредством которого можно управлять ориентацией гибких зон управляемого концевого участка. Каждый раз, когда управляемый кончик продвигается, ориентацией всех зон управляют посредством рычага управления 195, а информацию сохраняют в устройстве 193 о пути, по которому инструмент уже продвинулся в системе 191 каналов. Таким образом, также можно избежать или по меньшей мере существенно уменьшить контакт между инструментом и стенками каналов. Очевидно, что изобретение не ограничено описанными вариантами осуществления, которые показаны на приложенных чертежах, но что в пределах объема правовых притязаний формулы изобретения модификации могут быть применены без выхода за пределы концепции изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Инструмент для применения в эндоскопии, содержащий трубкообразное звено, имеющее управляемый концевой участок, исполнительный концевой участок, содержащий исполнительное средство, и продольные элементы (22-26, 34-36), предусмотренные для передачи движения исполнительного средства на управляемый концевой участок для изменения его ориентации, при этом трубкообразное звено выполнено из наружного защитного цилиндрического элемента (4), внутреннего защитного цилиндрического элемента (1) и первого (2) и второго (3) промежуточных цилиндрических элементов, расположенных между внутренним (1) и наружным (4) защитными цилиндрическими элементами, причем каждый один из указанных первого (2) и второго (3) промежуточных цилиндрических элементов содержит один набор продольных элементов (22-26, 34-36), а исполнительное средство на исполнительном концевом участке содержит трубкообразную секцию, содержащую первую (59) и вторую (56) гибкие исполнительные зоны и первую (60) и вторую (58) жесткие исполнительные зоны, причем указанные гибкие (59, 56) и жесткие (60, 58) исполнительные зоны размещены в чередующемся порядке, при этом управляемый концевой участок имеет первую (52) и вторую (54) независимые гибкие управляемые зоны и первую (51) и вторую (53) жесткие управляемые зоны, причем указанные гибкие (52, 54) и жесткие (51, 53) управляемые зоны размещены в чередующемся порядке; причем количество гибких исполнительных зон (59,56) равно количеству независимых гибких управляемых зон (52, 54), при этом первая жесткая исполнительная зона (60) и первая жесткая управляемая зона (51) соединены посредством первого набора продольных элементов, которые предусмотрены для воздействия на изменение ориентации первой независимой гибкой управляемой зоны (52), а вторая жесткая исполнительная зона (58) и указанная вторая жесткая управляемая зона (53) соединены посредством второго набора продольных элементов, которые предусмотрены для воздействия на изменение ориентации второй независимой гибкой управляемой зоны(54). 2. Инструмент по п.1, в котором указанная трубкообразная секция исполнительного средства имеет диаметр, который отличается от диаметра остального трубкообразного звена. 3. Инструмент по п.1 или 2, в котором у управляемого концевого участка наружный защитный цилиндрический элемент (4) содержит первое жесткое кольцо (41), указанный второй промежуточный цилиндрический элемент (3) расположен смежно с наружным защитным цилиндрическим элементом (4),где указанный второй промежуточный цилиндрический элемент (3) содержит первое жесткое кольцо(31), соединенное с первой стороной первого гибкого участка (32), и дополнительно содержит второе жесткое кольцо (33), соединенное со второй стороной первого гибкого участка (32), причем второе жест-9 023597 кое кольцо (33) на другой стороне соединено со вторым гибким участком (34) второго промежуточного цилиндрического элемента (3), при этом указанное второе жесткое кольцо (33) также соединено с указанным первым жестким кольцом (41) наружного защитного цилиндрического элемента (4), причем указанный первый промежуточный цилиндрический элемент (2) расположен между указанным вторым промежуточным цилиндрическим элементом (3) и внутренним защитным цилиндрическим элементом(1), при этом первый промежуточный цилиндрический элемент (2) содержит первое жесткое кольцо (21),соединенное с одной стороной с первым гибким участком (22), при этом первое жесткое кольцо (21) также соединено с первым жестким кольцом (31) второго промежуточного цилиндрического элемента(3). 4. Инструмент по п.3, в котором внутренний защитный цилиндрический элемент (1) содержит первое внутреннее жесткое кольцо (11), соединенное с первым внутренним гибким участком (12) внутреннего защитного цилиндрического элемента (1) и с указанным первым жестким кольцом (21) первого промежуточного цилиндрического элемента (2). 5. Инструмент по п.4, в котором продольные элементы каждого одного из первого и второго наборов продольных элементов параллельны друг другу и расположены на равном расстоянии по периферии указанных первого промежуточного цилиндрического элемента (2) и второго промежуточного цилиндрического элемента (3) соответственно. 6. Инструмент по п.5, в котором количество продольных элементов каждого одного из первого и второго наборов продольных элементов первого промежуточного цилиндрического элемента (2) и второго промежуточного цилиндрического элемента (3) равно по меньшей мере трем.
МПК / Метки
МПК: A61M 25/01, A61B 1/005, A61M 25/00
Метки: инструмент, эндоскопии, применения
Код ссылки
<a href="https://eas.patents.su/16-23597-instrument-dlya-primeneniya-v-endoskopii.html" rel="bookmark" title="База патентов Евразийского Союза">Инструмент для применения в эндоскопии</a>
Регулируемый ребристый центрирующий инструмент для использования в трубах с изменяющимся диаметром
Номер патента: 10518
Опубликовано: 30.10.2008
Автор: Хеугхом Пер Олав
МПК: E21B 17/10
Метки: трубах, инструмент, центрирующий, изменяющимся, использования, диаметром, регулируемый, ребристый
Формула / Реферат:
1. Регулируемый центрирующий инструмент (1) для использования в трубах с изменяющимся внутренним диаметром, снабженный несколькими идентичными и бесступенчато регулируемыми, выступающими в радиальном направлении ребрами (2), имеющими направляющие лапки (2') и скошенные концевые поверхности (2"), отличающийся тем, что ребра (2) после установки удерживаются с помощью верхней запирающей оправки (3) с защитным штифтом (4) и нижней запирающей оправки...
Инструмент для выкапывания объекта
Номер патента: 4028
Опубликовано: 25.12.2003
Автор: Бланге Ян Етте
МПК: B03C 1/12, B65G 54/02, E21B 7/18...
Метки: объекта, выкапывания, инструмент
Формула / Реферат:
1. Инструмент для выкапывания объекта, содержащий устройство для транспортировки частиц магнитного материала в выбранном направлении, имеющее опорный элемент, имеющий опорную поверхность, для поддержки частиц, проходящую в заданном направлении, магнит, предназначенный для генерирования магнитного поля, удерживающего магнитные частицы на опорной поверхности, и имеющего на опорной поверхности по меньшей мере один участок с пониженной...
Инструмент для эндоскопических применений и способ его получения
Номер патента: 18560
Опубликовано: 30.08.2013
Автор: Вербек Марсель Антониус Элизабет
МПК: A61B 1/005
Метки: инструмент, получения, применений, способ, эндоскопических
Формула / Реферат:
1. Способ изготовления воздействующей части инструмента (1) для эндоскопических применений, причем инструмент (1) содержит трубчатый элемент (3), имеющий оконечный участок (31) для манипулирования, обычно используемый в местоположении, которое является трудным для достижения, с гибким участком и воздействующее средство, предусмотренное для приведения в действие оконечного участка (31) для манипулирования и расположенное у другого оконечного...
Скважинный инструмент
Номер патента: 9636
Опубликовано: 28.02.2008
Автор: Телфер Джордж
МПК: E21B 34/14, E21B 33/10
Метки: скважинный, инструмент
Формула / Реферат:
1. Скважинный инструмент, предназначенный для изолирования формации от давления текучей среды, введенной в ствол скважины, содержащий корпус, имеющий осевой канал, обеспечивающий проход для текучей среды между осевым входом и осевым выходом через спусковую колонну, постоянный уплотнительный элемент, расположенный вокруг корпуса для контакта со стенкой ствола скважины, один или несколько первых радиальных выходов, проходящих сквозь корпус на...
Безопасный инструмент для усиления крутящего момента
Номер патента: 14344
Опубликовано: 29.10.2010
Автор: Юнкерс Джон К.
МПК: B25G 1/06, B25B 21/00
Метки: безопасный, момента, инструмент, усиления, крутящего
Формула / Реферат:
1. Безопасный инструмент для усиления крутящего момента, который включает корпус; размещенные в вышеуказанном корпусе средства усиления крутящего момента для обеспечения по меньшей мере двух режимов работы, включая первый режим, в котором инструмент для усиления крутящего момента работает с высокой скоростью и низким крутящим моментом, и второй режим, в котором инструмент для усиления крутящего момента работает с низкой скоростью и высоким...
Предыдущий патент: Способы обработки композиции эритроцитов для инактивации патогена
Следующий патент: Система для цементирования трубных изделий, содержащая гидравлический забойный двигатель
Случайный патент: Применение производных бицикло [2.2.1] гептана для приготовления нейропротекторных фармацевтических композиций