Летательный аппарат с машущим крылом, приводимый в движение мышечной силой пилота
Формула / Реферат
1. Летательный аппарат с машущим крылом, приводимый в движение мышечной силой пилота, содержащий
корпус (5),
пару машущих крыльев, которые в удаленной от корпуса (5) внешней части (II) имеют изменяемый профиль или руль, позволяющий изменять подъемную силу при заданном потоке, и
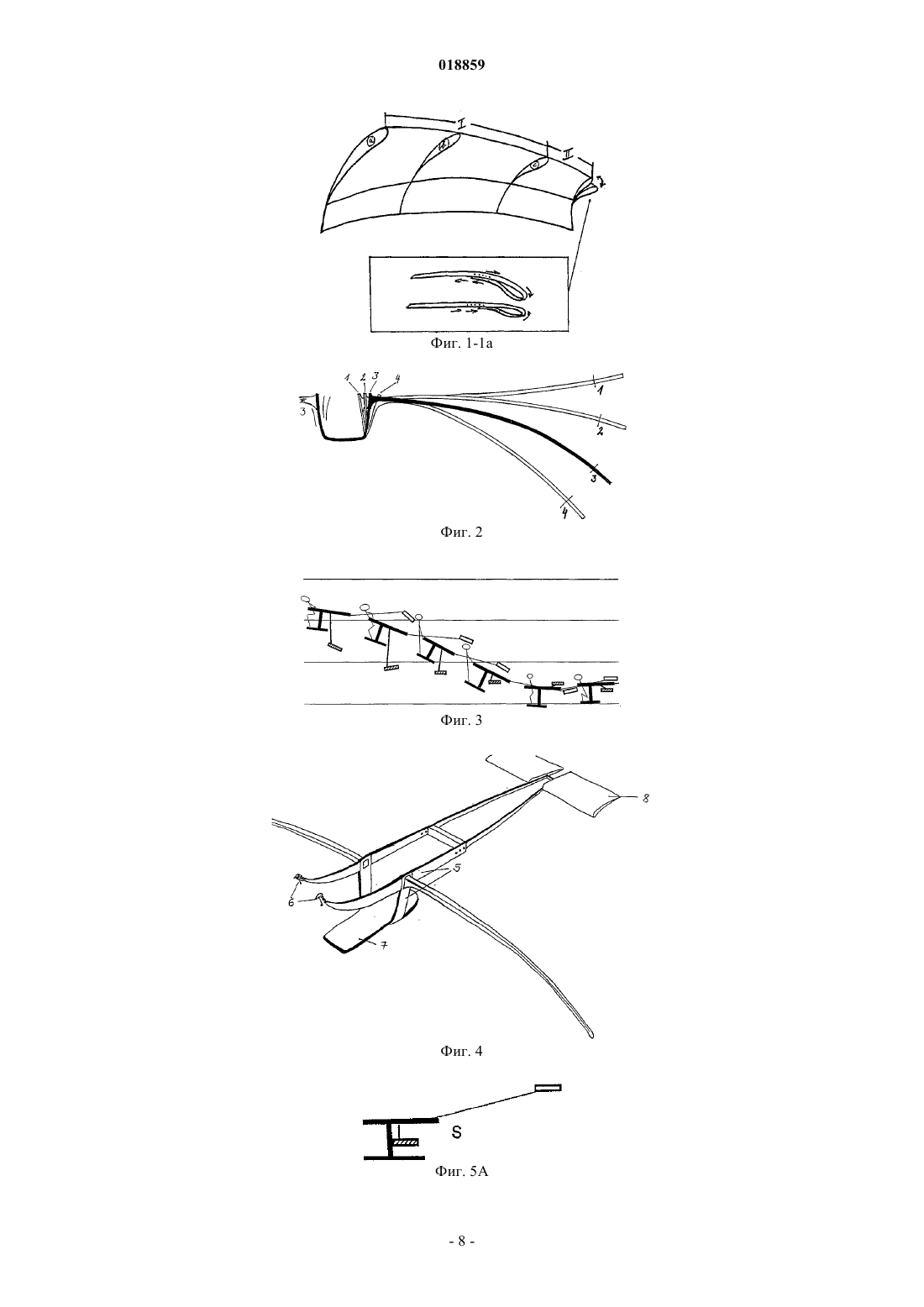
горизонтальное оперение с отклоняемым рулем высоты (8), причем корпус (5) и жестко соединенная с ним пара машущих крыльев выполнены из упругого материала со степенью упругости, которая делает возможным машущее движение пары крыльев, машущие крылья в состоянии покоя (3) изогнуты вниз, а упругость рассчитана так, чтобы под весом пилота машущие крылья в полете возвращались в нейтральное положение (2), корпус (5) выполнен таким образом, чтобы разместить пилота в вертикальном положении по отношению к продольной оси корпуса так, чтобы посредством вытягивания и подтягивания ног пилот мог пофазно нагружать и разгружать летательный аппарат, а летательный аппарат оснащен также механическими устройствами, которые позволяют приводить в действие изменяемые внешние части (II) крыльев и изменять отклонение руля высоты синфазно с движением машущих крыльев.
2. Летательный аппарат с машущим крылом по п.1, корпус (5) которого выполнен упругим в форме рамы, которая окружает пилота по меньшей мере с двух сторон и на которой закреплены машущие крылья.
3. Летательный аппарат с машущим крылом по п.2, в котором корпус (5) выполнен с возможностью упругой деформации поперек продольной оси летательного аппарата.
4. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором корпус (5) и крылья образованы, по меньшей мере, частично упругим монококом.
5. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором изменяемые внешние части (II) крыльев образованы по меньшей мере одним рулем в области концевой кромки крыла.
6. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором машущие крылья имеют один или несколько параллельных лонжеронов, которые связаны с корпусом (5) и простираются, по меньшей мере, до внешних частей крыльев.
7. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором управление изменяемыми внешними частями крыльев и/или отклонением руля высоты осуществляется пилотом вручную посредством тяг управления и/или тросовых приводов.
8. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором обшивка машущих крыльев выполнена с возможностью изменения своей формы при движении внешних частей (II) крыльев.
9. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором присутствует демпфирующий элемент корпуса, который смягчает его вибрацию.
10. Летательный аппарат с машущим крылом по п.9, в котором демпфирующий элемент корпуса выполнен с возможностью настройки.
11. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором упругость машущих крыльев вдоль одного или нескольких лонжеронов крыла изменяется.
12. Летательный аппарат с машущим крылом по п.11, в котором упругость машущего крыла увеличивается на участке плоскости между расположенной ближе к корпусу точкой (а) и более удаленной от корпуса точкой (b) и/или упругость уменьшается на другом участке между расположенной ближе к корпусу точкой (b) и более удаленной от корпуса точкой (с).
13. Способ эксплуатации летательного аппарата по одному из предыдущих пунктов, характеризующийся тем, что пилот движением ног пофазно нагружает и разгружает летательный аппарат.
14. Способ по п.13, в котором при синфазном нагружении и разгружении летательного аппарата пилотом приводится в действие изменяемая внешняя часть (II) крыла.
15. Способ по п.13 или 14, в котором пилот пофазно полностью разгружает летательный аппарат.
16. Способ по одному из пп.13-15, в котором управление летательным аппаратом осуществляется посредством горизонтального смещения тела пилота относительно продольной и поперечной оси корпуса летательного аппарата.

Текст
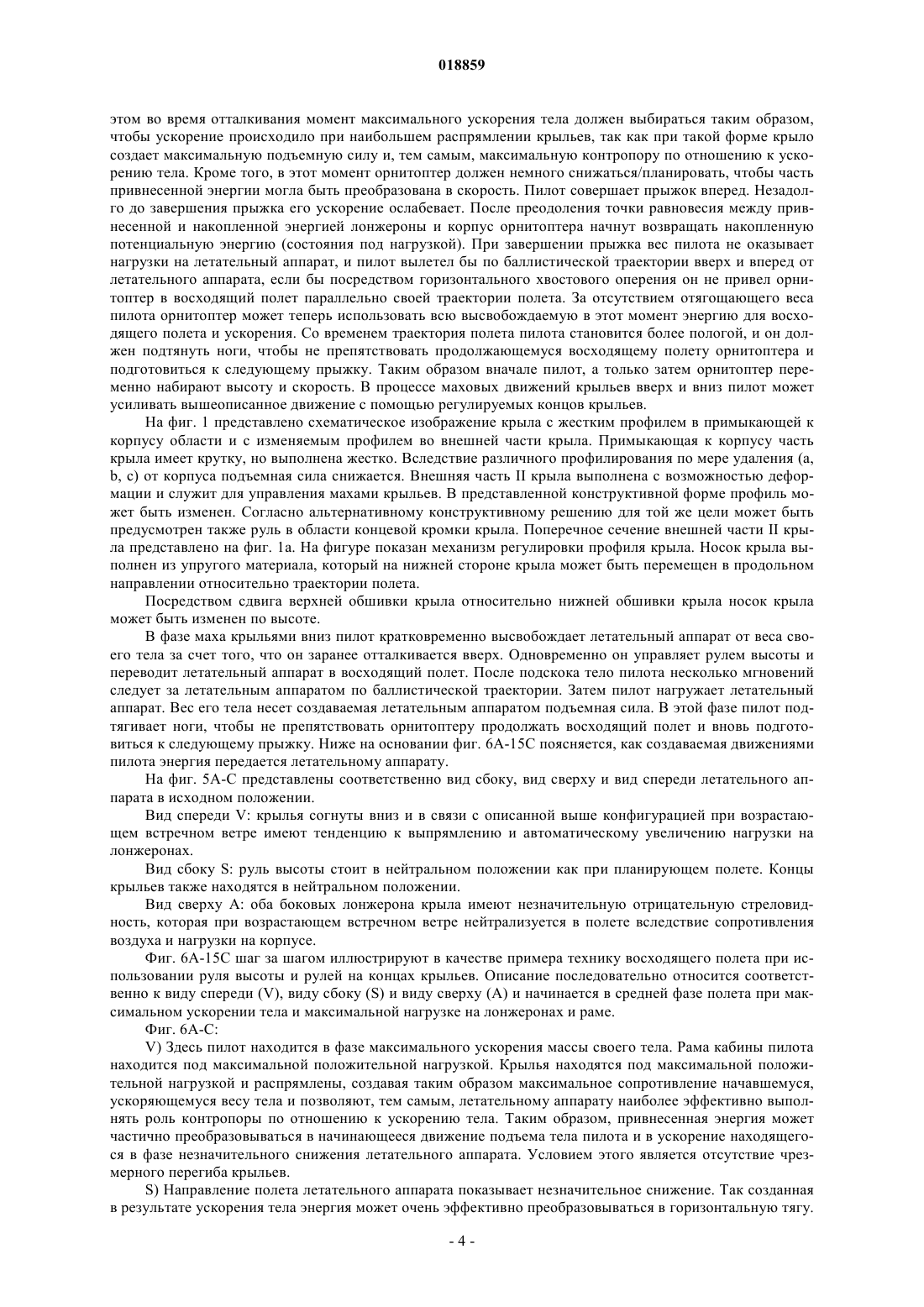
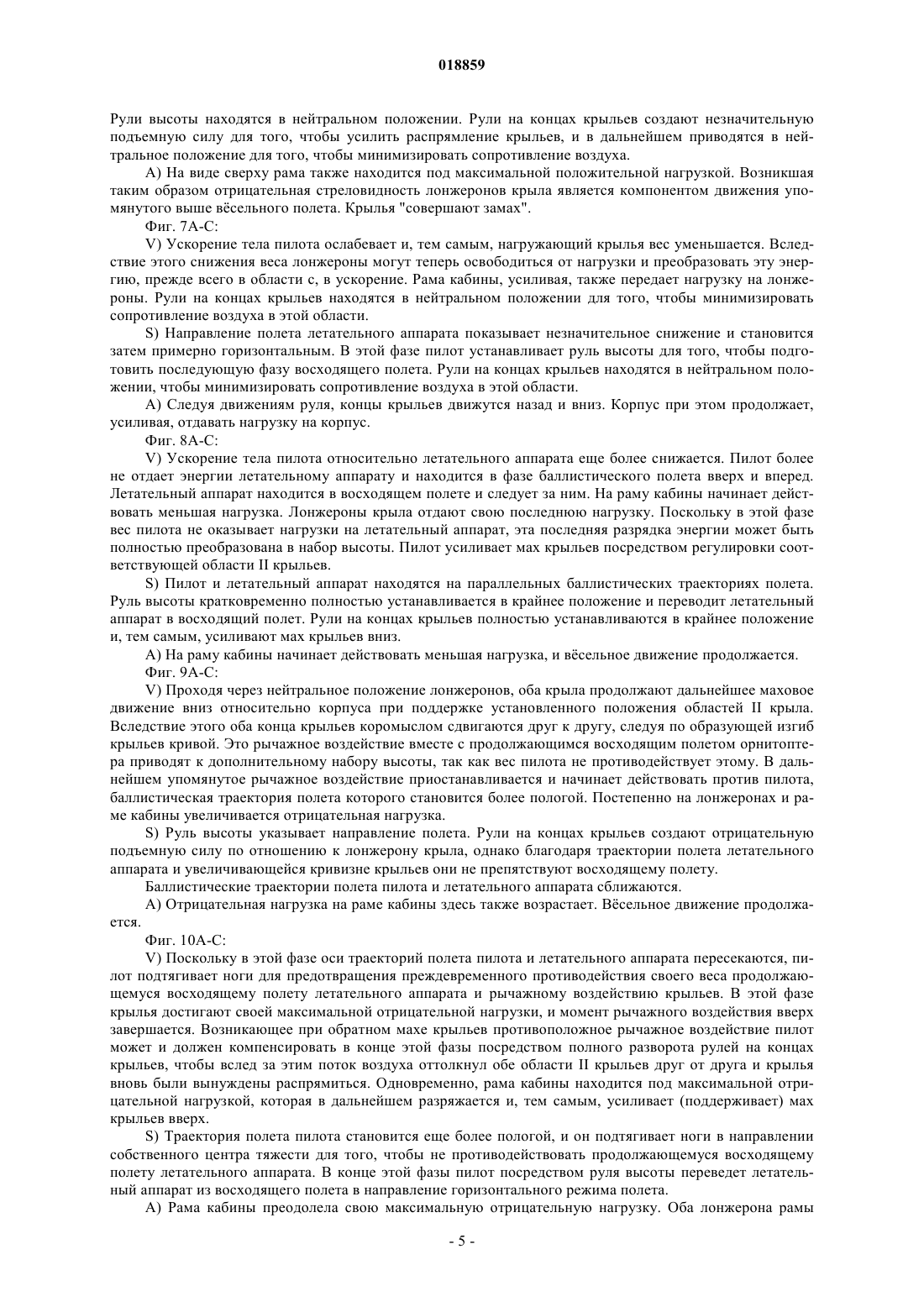
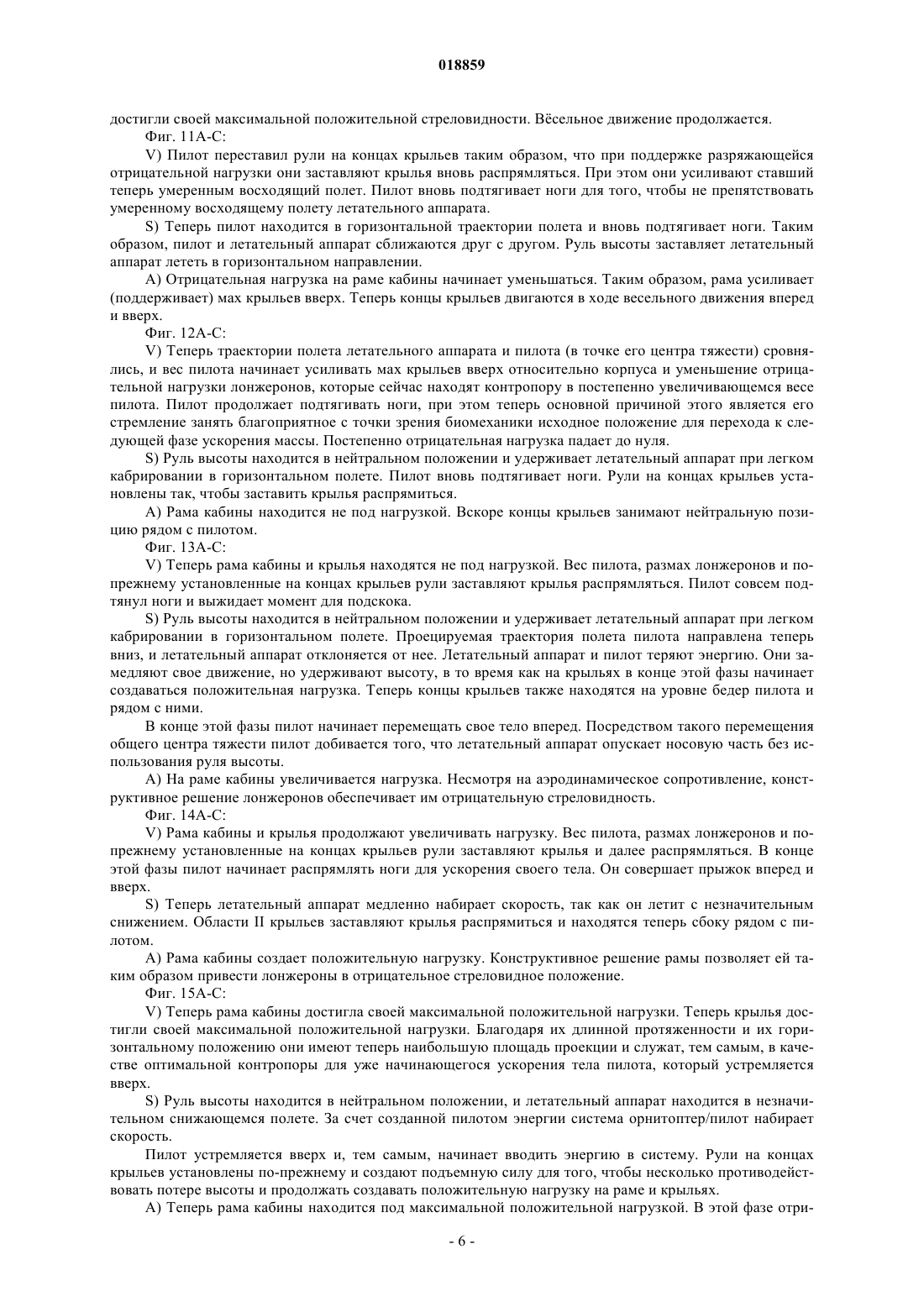
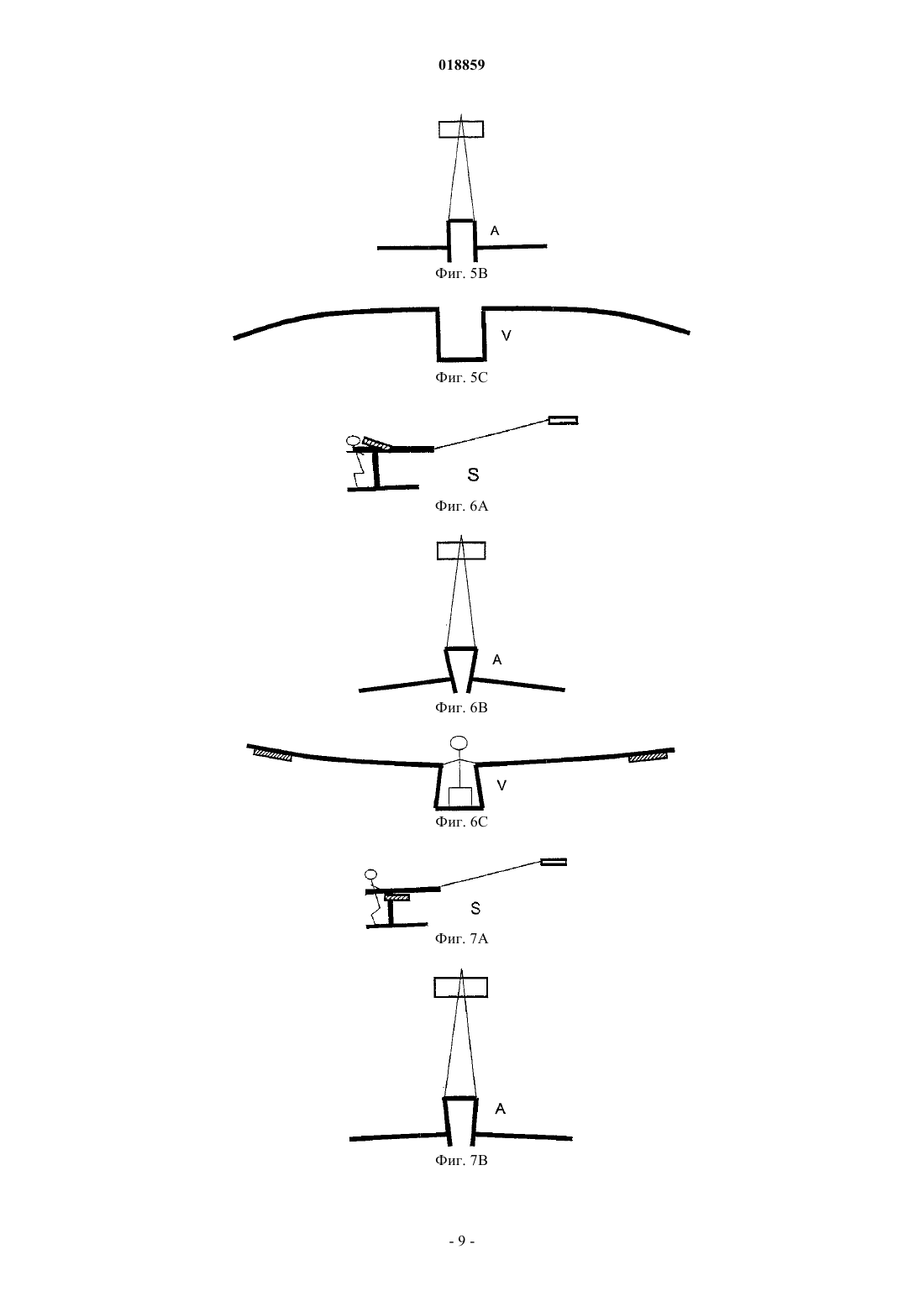
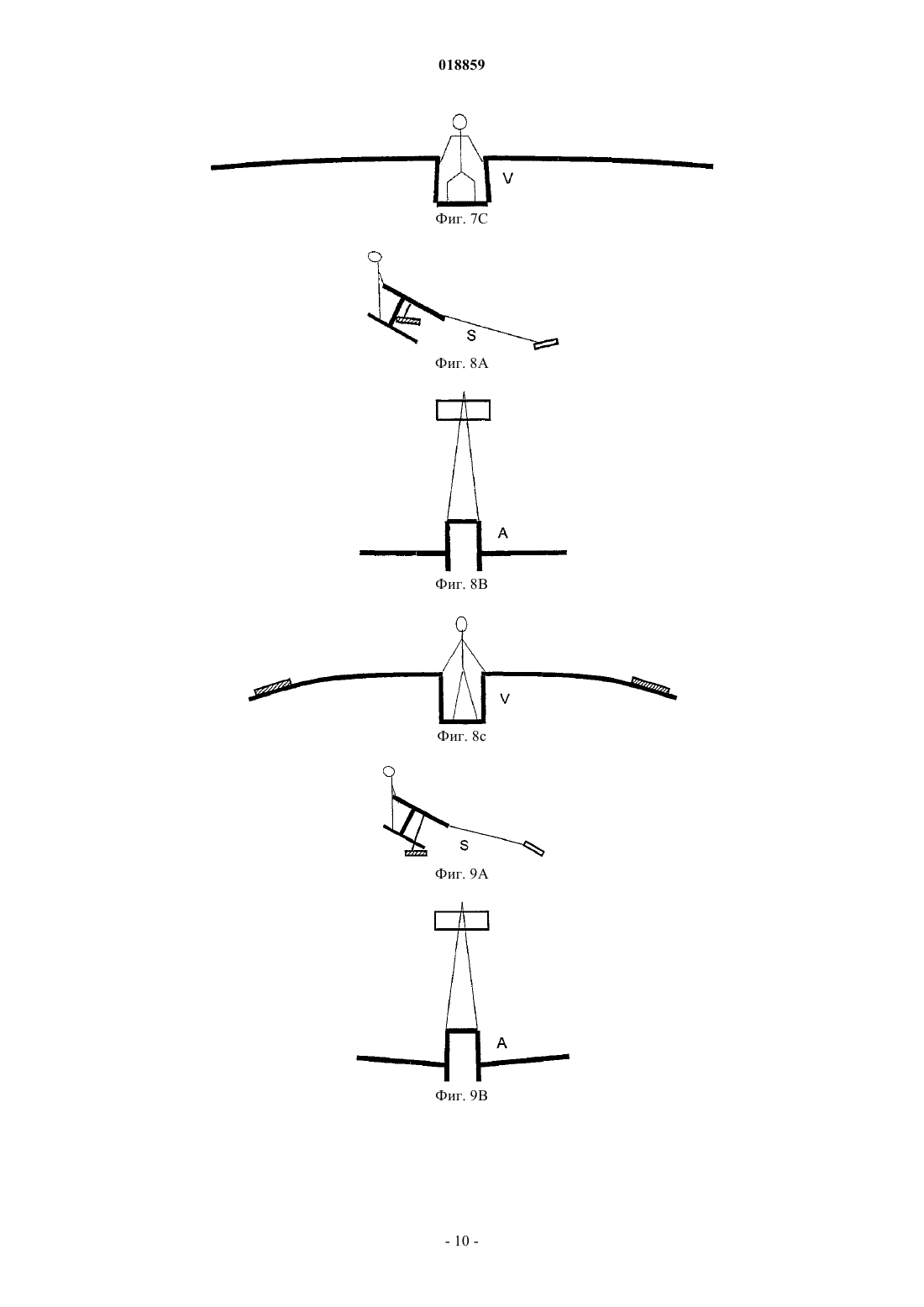
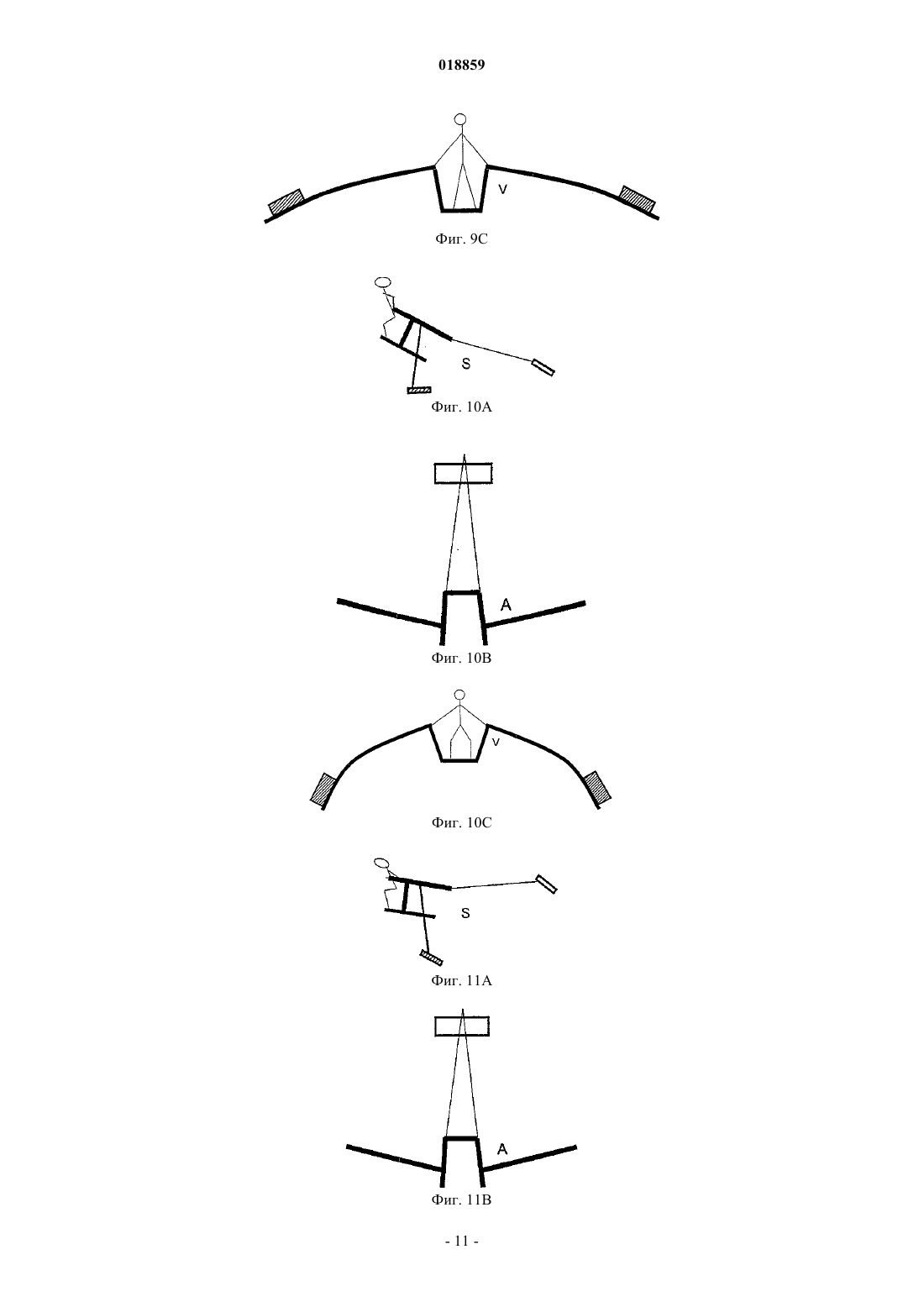
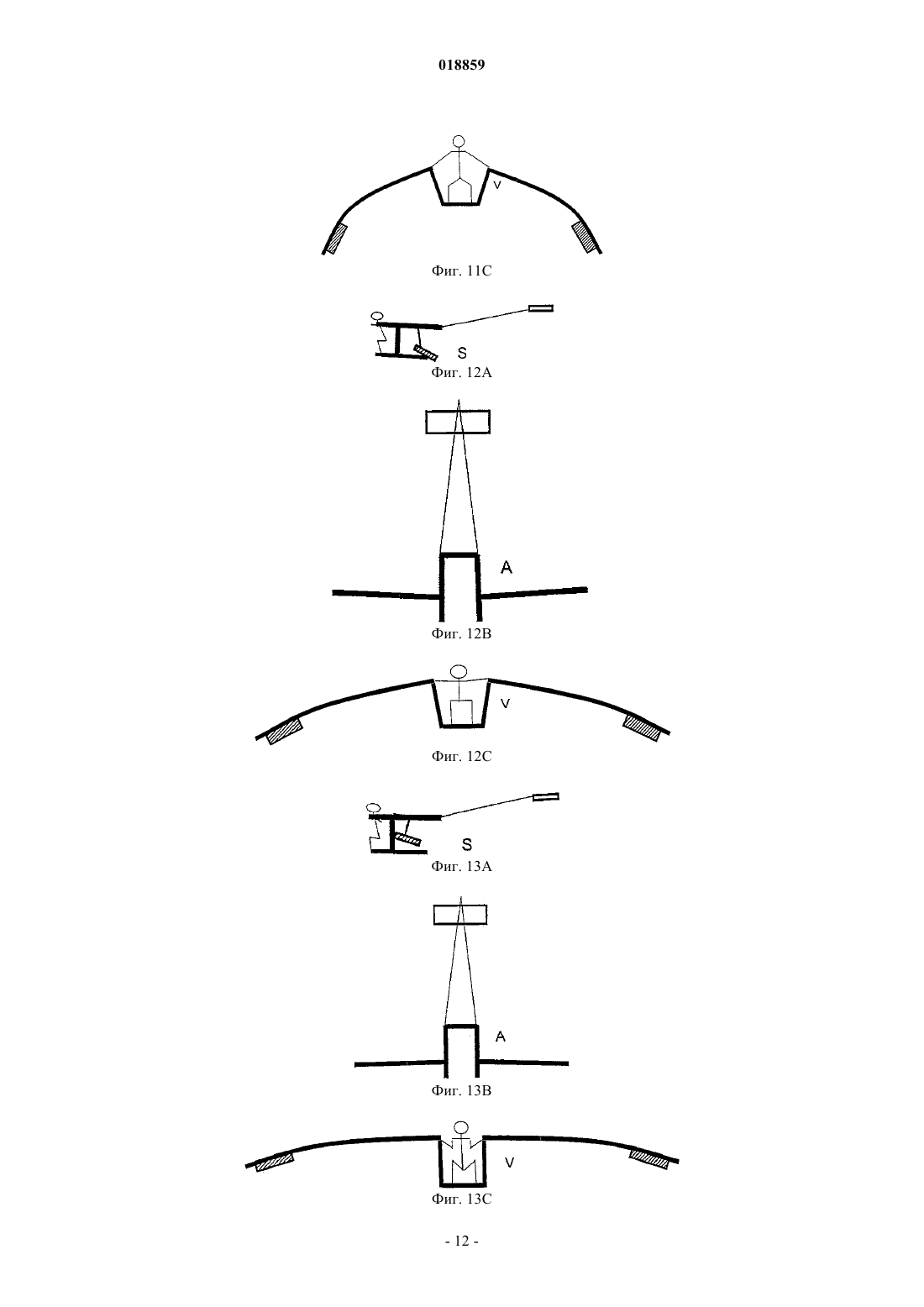
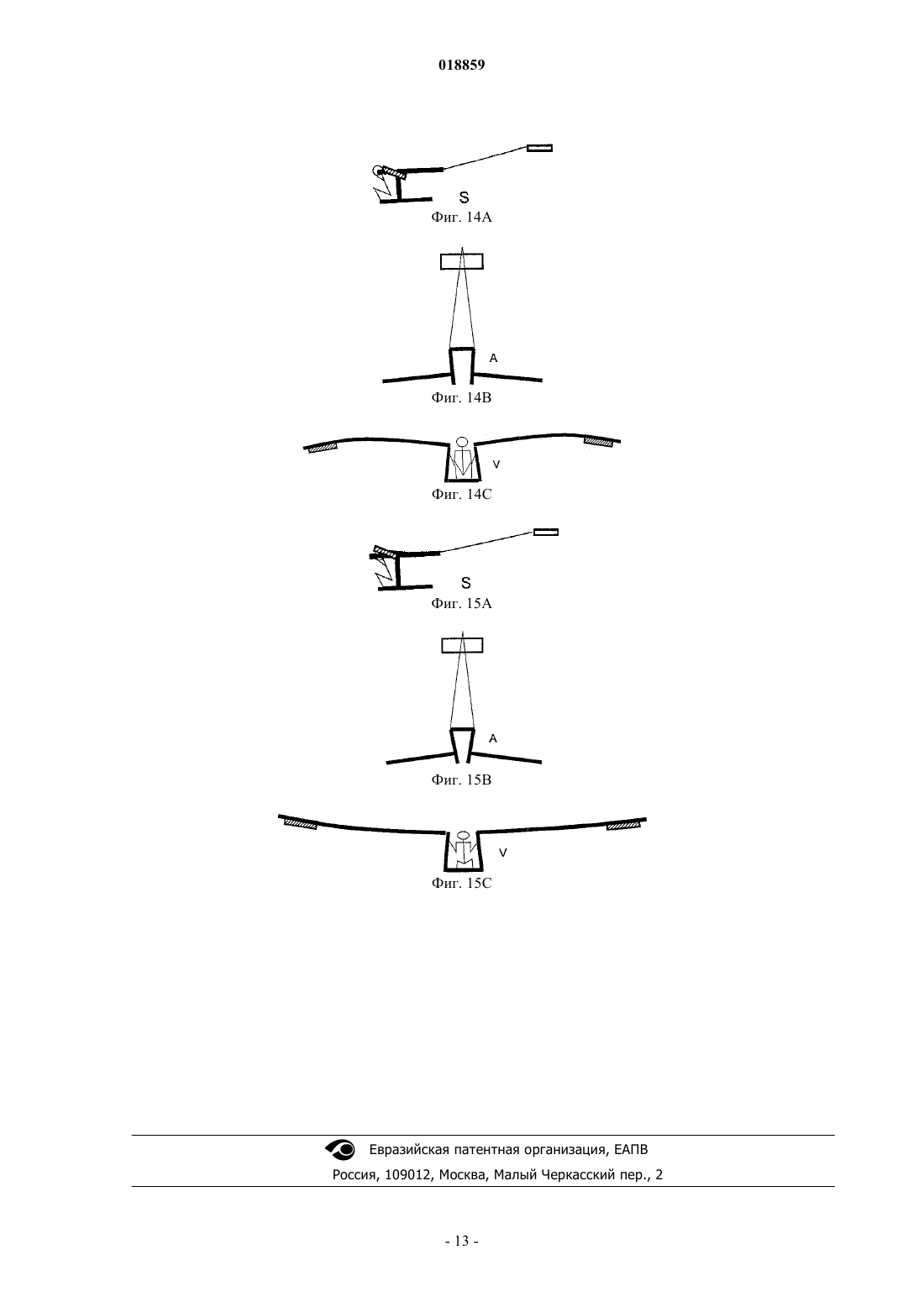
ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ, ПРИВОДИМЫЙ В ДВИЖЕНИЕ МЫШЕЧНОЙ СИЛОЙ ПИЛОТА Изобретение относится к приводимому в движение мышечной силой летательному аппарату с машущим крылом, состоящему из корпуса, пары машущих крыльев, которые в отстоящей от корпуса внешней части крыльев имеют изменяемый профиль или руль, позволяющий изменять подъемную силу при заданном потоке, и горизонтальное оперение с изменяемым отклонением руля высоты, при этом пара машущих крыльев и корпус выполнены из упругого материала со степенью упругости, которая делает возможным машущее движение пары крыльев, при этом машущие крылья в состоянии покоя выгнуты вниз, а упругость рассчитана так, что под весом пилота машущие крылья в полете возвращаются в нейтральное положение, при этом корпус выполнен таким образом, чтобы разместить пилота в вертикальном положении по отношению к продольной оси корпуса так, чтобы посредством вытягивания и подтягивания ног пилот мог пофазно нагружать и разгружать летательный аппарат, при этом летательный аппарат с машущим крылом оснащен также механическими устройствами, которые позволяют приведение в действие изменяемых наружных частей крыльев и изменяемого отклонения руля высоты синфазно с движением машущих крыльев. Изобретение относится к летательному аппарату с машущим крылом, называемому также орнитоптером, прежде всего к летательному аппарату с машущим крылом, который приводится в движение мышечной силой пилота. Из уровня техники известно несколько планов создания моторизированных и не моторизированных летательных аппаратов с машущим крылом. Однако до сих пор сообщалось только о не слишком успешных попытках. В 1942 г. Адальберту Шмиду удалось подняться в воздух и совершить небольшой полет на оснащенном двигателем устройстве. В 2006 г. оснащенный двигателем орнитоптер профессора Джеймса Де Лори пролетел расстояние около 300 м. Для дополнительного ускорения использовалась тяговая турбина. Общим для обоих устройств было то, что оба они оснащались двумя неподвижно закрепленными дополнительными крыльями,которые при обтекающем потоке воздуха постоянно создавали подъемную силу, и двумя машущими крыльями для ускорения. Насколько успешным был полет махолета Эмиля Хартманна в 1960 г., оценить трудно, так как для ускорения использовалась резиновая лента для того, чтобы запустить аппарат в воздух и затем продолжить полет с помощью двух машущих крыльев. Необходимая для взмахов крыльев энергия обеспечивалась посредством рычагов и их разворотов руками пилота. Но мышечной силы, которую пилот может создавать только руками для того, чтобы приводить в движение машущие крылья, вероятно, недостаточно для того, чтобы суметь успешно имитировать маховые движения птичьего полета продолжительное время. Поэтому, исходя из уровня техники, другие летательные аппараты предусматривают для приведения в движение машущих крыльев также движение ног пилота. Отточенная техника перевода движения ног в движение машущего крыла описана, например,в описании изобретения к патенту DE 3537365 С 2. Другие предложения по созданию орнитоптера, приводимого в движение мышечной силой, как описано в DE 1950970074 А 1 и DE 2909975 А 1, предусматривают создание усилия посредством ускорения массы тела пилота. Однако эти концепции не уделяют должного внимания сложному процессу движения, который необходим для успешной имитации птичьего полета. Кроме того, эти концепции недооценивают важную роль положения горизонтального хвостового оперения в различных фазах маха основных крыльев. В вышеупомянутых публикациях речь идет о жестких, прямых в двух плоскостях крыльях, которые за счет их крепления на оси вращения могут совершать только двухмерное машущее движение. Крылья птиц, напротив, совершают нечто похожее на движение весла и в процессе движения изменяют профиль участков крыла. Машущий полет птицы становится возможным только благодаря последовательности движений между махами кисти и предплечья птицы. При движении крыльев вверх - вниз внешняя часть крыла - у птицы это соответствует маху кисти - совершает движение весла, в то время как часть крыла, располагающаяся ближе к корпусу - у птицы это соответствует маху предплечья - сохраняет примерно тот же угол атаки. В фазе движения крыла вверх птица устанавливает мах кисти так, чтобы создать более высокую подъемную силу. И наоборот, в фазе движения крыла вниз мах кисти устанавливается отрицательно,так что он создает лишь незначительную подъемную силу или не создает подъемной силы вообще. Таким образом, мах кисти может обеспечить необходимую тягу, в то время как мах предплечья создает постоянную подъемную силу. Задача данного изобретения состоит в том, чтобы создать летательный аппарат с машущим крылом для имитации птичьего полета, который наиболее эффективно учитывает биомеханику человеческого тела для возможности создания мускульного привода. Данная задача решена в летательном аппарате с машущим крылом по п.1 формулы изобретения и в способе эксплуатации летательного аппарата с машущим крылом по п.11 формулы изобретения. Изобретение представляет собой летательный аппарат с машущим крылом, приводимый в движение мышечной силой пилота, содержащий корпус, пару машущих крыльев, которые в удаленной от корпуса внешней части имеют изменяемый профиль или руль, позволяющий изменять подъемную силу при заданном потоке, и горизонтальное оперение с отклоняемым рулем высоты. Корпус и жестко соединенная с ним пара машущих крыльев выполнены из упругого материала со степенью упругости, которая делает возможным машущее движение пары крыльев. Машущие крылья в состоянии покоя изогнуты вниз, а упругость рассчитана так, чтобы под весом пилота машущие крылья в полете возвращались в нейтральное положение. Корпус выполнен таким образом, чтобы разместить пилота в вертикальном положении по отношению к продольной оси корпуса так, чтобы посредством вытягивания и подтягивания ног пилот мог пофазно нагружать и разгружать летательный аппарат. Кроме того, летательный аппарат с машущим крылом оснащен также механическими устройствами, которые позволяют приводить в действие изменяемые внешние части крыльев и изменять отклонение руля высоты синфазно с движением машущих крыльев. Представленный в данном изобретении летательный аппарат позволяет имитировать птичий полет посредством изменяемых внешних частей крыльев или рулей и изменяемого отклонения руля высоты. Кроме того, согласно изобретению в летательном аппарате передача энергии для приведения в движение машущих крыльев благоприятным образом усиливается (поддерживается). Прежде всего, для приведения в движение машущих крыльев в летательном аппарате не предусмотрены обычные для уровня техники механические шарниры. Вместо этого машущие крылья жестко связаны с корпусом, при этом движение машущих крыльев становится возможным только благодаря их упругости. Вследствие создаваемой в полете на машущих крыльях подъемной силы, с одной стороны, и веса пилота, с другой стороны,машущие крылья вынуждены занять нейтральное положение, то есть практически в направлении примерно прямолинейного простирания. Для этого корпус выполнен таким образом, чтобы обеспечить пилоту вертикальное положение, позволяющее ему нагружать и разгружать летательный аппарат, вытягивая и подтягивая ноги. В результате в полете при нагрузке летательного аппарата машущие крылья сгибаются вверх, в то время как при разгрузке летательного аппарата крылья отклоняются вниз. Кроме того,для имитации птичьего полета имеют значение изменяемые внешние части крыльев и изменяемое отклонение руля высоты. Изменяемая установка руля может приводиться в действие либо механически самим пилотом, либо отклонение руля в зависимости от положения машущих крыльев может происходить автоматически, например, посредством соответствующего механического сопряжения. Согласно одному предпочтительному конструктивному решению корпус летательного аппарата выполнен упругим, в форме рамы, которая окружает пилота по меньшей мере с двух сторон, и на которой укреплены машущие крылья. Рама может быть также интегрирована в упругую конструкцию типа монокок (в которой внешняя оболочка является основным и, как правило, единственным несущим элементом (Monocoque. Для улучшения аэродинамики в области корпуса рама может иметь также несиловой обтекатель. Предпочтительно корпус выполнен с возможностью упругой деформации поперек продольной оси летательного аппарата. Способность корпуса к деформации поперек продольной оси позволяет производить всельные движения в данной конструктивной форме и поддерживает машущее движение крыльев. В соответствии с одним конструктивным решением как корпус, так и крылья образованы, по меньшей мере, частично, упругим монококом. Согласно одному конструктивному решению обе изменяемые внешние части крыльев образованы каждая по меньшей мере одним рулем в области концевой кромки крыла. Альтернативно, вся внешняя часть крыла может также двигаться подобно концевому элерону. Согласно другому конструктивному решению в области изменяемой внешней части крыльев может изменяться также и профиль. Например,крыло в этой области выполнено упруго, и предусмотрено механическое устройство для того, чтобы перемещать носовую часть крыла относительно концевой кромки, за счет чего в этой области угол установки крыла изменяется. Согласно одному конструктивному решению летательный аппарат имеет несколько параллельных лонжеронов для образования машущего крыла. Лонжероны жестко связаны с корпусом. Благодаря выбору различных материалов или их толщины они позволяют конструктивно получить желаемую упругость. Управление изменяемыми внешними частями крыльев и/или отклонением руля высоты может осуществляться пилотом вручную посредством тяг управления и/или тросовых приводов. Альтернативно,управление внешними частями крыльев и/или отклонением руля высоты может быть сопряжено также с движением машущих крыльев. В последнем конструктивном решении дополнительно может быть предусмотрено механическое устройство, которое позволяет пилоту придать автоматически заданному движению дополнительное желаемое движение для того, чтобы например, обеспечить отклонение руля высоты или элерона обычным способом. Кроме того, изобретение предусматривает способ эксплуатации летательного аппарата с машущим крылом. Этот способ основывается, главным образом, на том, что пилот пофазно нагружает и разгружает летательный аппарат. Посредством пофазного нагружения и разгружения летательного аппарата индуцируется движение машущих крыльев. Согласно одному конструктивному решению пилот синфазно с нагружением и разгружением приводит в действие изменяемую внешнюю часть крыльев, например, посредством устройства ручного управления. Альтернативно или дополнительно, управление изменяемой внешней частью крыла и/или отклонением руля высоты может осуществляться также автоматически. При этом пилот может разгружать летательный аппарат, совсем отрываясь ногами от него, так что в этой фазе полета пилот передвигается независимо от летательного аппарата в виде баллистического тела. Управление летательным аппаратом может производиться посредством горизонтального перемещения веса тела. Например, по типу дельтаплана управление может производиться исключительно посредством перемещения веса тела как вокруг продольной, так и поперечной оси летательного аппарата. Ниже со ссылкой на прилагаемые фигуры описывается предпочтительная конструктивная форма и в качестве примера режим полета предмета изобретения. Фиг. 1 схематически представляет конструкцию одного из машущих крыльев с изменяемыми концами крыла; фиг. 1 а представляет два поперечных сечения изменяемых концов крыла согласно фиг. 1; фиг. 2 схематически представляет в виде спереди различную степень изгиба основного крыла при увеличении и уменьшении нагрузки; фиг. 3 представляет в качестве примера в виде сбоку согласование движений пилота, образующегося приложения энергии, использования руля высоты, а также маховых движений основных крыльев, как это предусмотрено для набора высоты; фиг. 4 представляет изображение в перспективе конструктивной формы орнитоптера без обшивки основных крыльев; фиг. 5 А-С представляют схематическое изображение летательного аппарата с машущим крылом в исходном положении, при этом под S представлен вид сбоку, под А - вид сверху и под V - вид спереди; фиг. 6 А-15 С представляют схематическое изображение летательного аппарата с машущим крылом в разных фазах полета, а также положение тела пилота, при этом под S представлен вид сбоку, под А вид сверху и под V - вид спереди. Данное изобретение представляет собой легкий, переносной, запускаемый пилотом посредством разгона против ветра летательный аппарат с упругой рамой и жестко связанными с нею изогнутыми крыльями, которые в полете напрямую, посредством ускорения массы тела пилота побуждаются к совершению машущих движений, при этом в соответствии с конструктивным решением они могут совершать имитируемое при полете птиц всельное движение и выполнены с возможностью бесступенчатой деформации своей формы. Амплитуда махов находится в прямой зависимости от количества прилагаемых пилотом усилий при одинаковой частоте махов. По своей форме и биомеханике крылья летательного аппарата в грубом приближении воспроизводят крылья птиц. За счет кривизны и характеристик поперечного сечения крылья в полете под воздействием веса пилота и создаваемой подъемной силы вынуждены принять развернутую форму. Пилот в положении стоя имеет также достаточно места, чтобы по мере надобности перемещать свое тело на достаточно большой опоре в любом направлении и влиять, тем самым, на центр тяжести системы пилот/орнитоптер. Кроме того, пилот, который посредством работы ног придает ускорение своему телу, может в любой момент варьировать ритм и количество прилагаемого усилия, или при необходимости на короткое время приостановиться для аэродинамического использования инерции собственного тела, более тяжелого по сравнению с летательным аппаратом. Для того чтобы повлиять на скорость махов, пилот может посредством тросов или тяговой системы приводить концы крыльев в более или менее изогнутое положение и, тем самым, преобразовывать возникающую на концах крыльев положительную подъемную силу в отрицательную. Для махов крыльев вниз и вверх предусмотрен соответствующий угол атаки и/или индивидуальная форма поперечного сечения крыла. Таким образом, пилоту удается оптимально координировать частоту махов, амплитуду махов и управление прилагаемым усилием. На фиг. 4 представлено схематическое общее изображение летательного аппарата. Летательный аппарат включает в себя упругий корпус 5 в форме рамы, к которой снизу присоединена платформа 7 для пилота. В направлении полета позади платформы для пилота предусмотрено свободное пространство,которое позволяет пилоту стоять также позади платформы 7, чтобы иметь возможность нести летательный аппарат. Также ближе вперед в направлении полета к корпусу 5 присоединены рукоятки 6. Рукоятки снабжены механическими устройствами, которые позволяют приводить в действие руль летательного аппарата (на чертежах не показаны). Сбоку на упругом корпусе 5 по обе стороны укреплены машущие крылья, которые представлены на фиг. 4 только символически лонжероном 9. Лонжерон 9 охвачен профилем, как показано на фиг. 1. Сочленение между корпусом 5 и лонжероном 9 выполнено жестко, в то время как и корпус 5, и лонжерон 9 обладают достаточной упругостью для обеспечения движения машущих крыльев. Движения машущих крыльев схематически представлены на фиг. 2. Со ссылкой на фиг. 2 в позиции 2 представлено положение крыльев, которое они занимают в планирующем полете только под нагрузкой веса пилота. Положение 1, напротив, показывает их отклонение вверх. Оно достигается,когда вес пилота воздействует на платформу 7 для пилота с двукратным ускорением земного притяжения, как это происходит, если пилот отталкивается от платформы 7 для пилота вверх. Положение 3 показывает крыло в исходном положении, то есть без нагрузки весом пилота. Положение 4 показывает машущее крыло при максимальном махе вниз. Мах вниз может производиться, например, в результате того, что посредством изменения положения руля на внешней части крыльев на крыле создается отрицательная подъемная сила. Детальный процесс движения в целом в разных фазах полета дополнительно поясняется на фиг. 6-15. Вновь ссылаясь на фиг. 4, к тыльной части корпуса 5 в направлении полета примыкает кронштейн хвостового оперения, на котором укреплен руль высоты 8. Этот руль высоты 8 может регулироваться посредством механического устройства (на чертежах не показано). Принцип работы летательного аппарата с машущим крылом согласно изобретению строится на том,чтобы предельно точно воспроизвести процесс движения птицы в полете и пофазно, преимущественно в момент маха крыльев вниз, освобождать летательный аппарат от веса пилота. Предусматривается, что при старте пилот несет летательный аппарат, разбегается против ветра и запрыгивает сзади на открытый с той стороны корпус. В момент отталкивания он должен находиться на возвышенном месте и прыгнуть далеко вперед, чтобы потерять как можно меньше скорости. Последующее приложение силы для маха крыльев производится напрямую и без потерь и направлено непосредственно на связанную с основанием крыльев раму, при этом пилот повторно и ритмично распрямляется и отталкивается от орнитоптера. При этом во время отталкивания момент максимального ускорения тела должен выбираться таким образом,чтобы ускорение происходило при наибольшем распрямлении крыльев, так как при такой форме крыло создает максимальную подъемную силу и, тем самым, максимальную контропору по отношению к ускорению тела. Кроме того, в этот момент орнитоптер должен немного снижаться/планировать, чтобы часть привнесенной энергии могла быть преобразована в скорость. Пилот совершает прыжок вперед. Незадолго до завершения прыжка его ускорение ослабевает. После преодоления точки равновесия между привнесенной и накопленной энергией лонжероны и корпус орнитоптера начнут возвращать накопленную потенциальную энергию (состояния под нагрузкой). При завершении прыжка вес пилота не оказывает нагрузки на летательный аппарат, и пилот вылетел бы по баллистической траектории вверх и вперед от летательного аппарата, если бы посредством горизонтального хвостового оперения он не привел орнитоптер в восходящий полет параллельно своей траектории полета. За отсутствием отягощающего веса пилота орнитоптер может теперь использовать всю высвобождаемую в этот момент энергию для восходящего полета и ускорения. Со временем траектория полета пилота становится более пологой, и он должен подтянуть ноги, чтобы не препятствовать продолжающемуся восходящему полету орнитоптера и подготовиться к следующему прыжку. Таким образом вначале пилот, а только затем орнитоптер переменно набирают высоту и скорость. В процессе маховых движений крыльев вверх и вниз пилот может усиливать вышеописанное движение с помощью регулируемых концов крыльев. На фиг. 1 представлено схематическое изображение крыла с жестким профилем в примыкающей к корпусу области и с изменяемым профилем во внешней части крыла. Примыкающая к корпусу часть крыла имеет крутку, но выполнена жестко. Вследствие различного профилирования по мере удаления (а,b, с) от корпуса подъемная сила снижается. Внешняя часть II крыла выполнена с возможностью деформации и служит для управления махами крыльев. В представленной конструктивной форме профиль может быть изменен. Согласно альтернативному конструктивному решению для той же цели может быть предусмотрен также руль в области концевой кромки крыла. Поперечное сечение внешней части II крыла представлено на фиг. 1 а. На фигуре показан механизм регулировки профиля крыла. Носок крыла выполнен из упругого материала, который на нижней стороне крыла может быть перемещен в продольном направлении относительно траектории полета. Посредством сдвига верхней обшивки крыла относительно нижней обшивки крыла носок крыла может быть изменен по высоте. В фазе маха крыльями вниз пилот кратковременно высвобождает летательный аппарат от веса своего тела за счет того, что он заранее отталкивается вверх. Одновременно он управляет рулем высоты и переводит летательный аппарат в восходящий полет. После подскока тело пилота несколько мгновений следует за летательным аппаратом по баллистической траектории. Затем пилот нагружает летательный аппарат. Вес его тела несет создаваемая летательным аппаратом подъемная сила. В этой фазе пилот подтягивает ноги, чтобы не препятствовать орнитоптеру продолжать восходящий полет и вновь подготовиться к следующему прыжку. Ниже на основании фиг. 6 А-15 С поясняется, как создаваемая движениями пилота энергия передается летательному аппарату. На фиг. 5 А-С представлены соответственно вид сбоку, вид сверху и вид спереди летательного аппарата в исходном положении. Вид спереди V: крылья согнуты вниз и в связи с описанной выше конфигурацией при возрастающем встречном ветре имеют тенденцию к выпрямлению и автоматическому увеличению нагрузки на лонжеронах. Вид сбоку S: руль высоты стоит в нейтральном положении как при планирующем полете. Концы крыльев также находятся в нейтральном положении. Вид сверху А: оба боковых лонжерона крыла имеют незначительную отрицательную стреловидность, которая при возрастающем встречном ветре нейтрализуется в полете вследствие сопротивления воздуха и нагрузки на корпусе. Фиг. 6 А-15 С шаг за шагом иллюстрируют в качестве примера технику восходящего полета при использовании руля высоты и рулей на концах крыльев. Описание последовательно относится соответственно к виду спереди (V), виду сбоку (S) и виду сверху (А) и начинается в средней фазе полета при максимальном ускорении тела и максимальной нагрузке на лонжеронах и раме. Фиг. 6 А-С:V) Здесь пилот находится в фазе максимального ускорения массы своего тела. Рама кабины пилота находится под максимальной положительной нагрузкой. Крылья находятся под максимальной положительной нагрузкой и распрямлены, создавая таким образом максимальное сопротивление начавшемуся,ускоряющемуся весу тела и позволяют, тем самым, летательному аппарату наиболее эффективно выполнять роль контропоры по отношению к ускорению тела. Таким образом, привнесенная энергия может частично преобразовываться в начинающееся движение подъема тела пилота и в ускорение находящегося в фазе незначительного снижения летательного аппарата. Условием этого является отсутствие чрезмерного перегиба крыльев.S) Направление полета летательного аппарата показывает незначительное снижение. Так созданная в результате ускорения тела энергия может очень эффективно преобразовываться в горизонтальную тягу. Рули высоты находятся в нейтральном положении. Рули на концах крыльев создают незначительную подъемную силу для того, чтобы усилить распрямление крыльев, и в дальнейшем приводятся в нейтральное положение для того, чтобы минимизировать сопротивление воздуха. А) На виде сверху рама также находится под максимальной положительной нагрузкой. Возникшая таким образом отрицательная стреловидность лонжеронов крыла является компонентом движения упомянутого выше всельного полета. Крылья "совершают замах". Фиг. 7 А-С:V) Ускорение тела пилота ослабевает и, тем самым, нагружающий крылья вес уменьшается. Вследствие этого снижения веса лонжероны могут теперь освободиться от нагрузки и преобразовать эту энергию, прежде всего в области с, в ускорение. Рама кабины, усиливая, также передает нагрузку на лонжероны. Рули на концах крыльев находятся в нейтральном положении для того, чтобы минимизировать сопротивление воздуха в этой области.S) Направление полета летательного аппарата показывает незначительное снижение и становится затем примерно горизонтальным. В этой фазе пилот устанавливает руль высоты для того, чтобы подготовить последующую фазу восходящего полета. Рули на концах крыльев находятся в нейтральном положении, чтобы минимизировать сопротивление воздуха в этой области. А) Следуя движениям руля, концы крыльев движутся назад и вниз. Корпус при этом продолжает,усиливая, отдавать нагрузку на корпус. Фиг. 8 А-С:V) Ускорение тела пилота относительно летательного аппарата еще более снижается. Пилот более не отдает энергии летательному аппарату и находится в фазе баллистического полета вверх и вперед. Летательный аппарат находится в восходящем полете и следует за ним. На раму кабины начинает действовать меньшая нагрузка. Лонжероны крыла отдают свою последнюю нагрузку. Поскольку в этой фазе вес пилота не оказывает нагрузки на летательный аппарат, эта последняя разрядка энергии может быть полностью преобразована в набор высоты. Пилот усиливает мах крыльев посредством регулировки соответствующей области II крыльев.S) Пилот и летательный аппарат находятся на параллельных баллистических траекториях полета. Руль высоты кратковременно полностью устанавливается в крайнее положение и переводит летательный аппарат в восходящий полет. Рули на концах крыльев полностью устанавливаются в крайнее положение и, тем самым, усиливают мах крыльев вниз. А) На раму кабины начинает действовать меньшая нагрузка, и всельное движение продолжается. Фиг. 9 А-С:V) Проходя через нейтральное положение лонжеронов, оба крыла продолжают дальнейшее маховое движение вниз относительно корпуса при поддержке установленного положения областей II крыла. Вследствие этого оба конца крыльев коромыслом сдвигаются друг к другу, следуя по образующей изгиб крыльев кривой. Это рычажное воздействие вместе с продолжающимся восходящим полетом орнитоптера приводят к дополнительному набору высоты, так как вес пилота не противодействует этому. В дальнейшем упомянутое рычажное воздействие приостанавливается и начинает действовать против пилота,баллистическая траектория полета которого становится более пологой. Постепенно на лонжеронах и раме кабины увеличивается отрицательная нагрузка.S) Руль высоты указывает направление полета. Рули на концах крыльев создают отрицательную подъемную силу по отношению к лонжерону крыла, однако благодаря траектории полета летательного аппарата и увеличивающейся кривизне крыльев они не препятствуют восходящему полету. Баллистические траектории полета пилота и летательного аппарата сближаются. А) Отрицательная нагрузка на раме кабины здесь также возрастает. Всельное движение продолжается. Фиг. 10 А-С:V) Поскольку в этой фазе оси траекторий полета пилота и летательного аппарата пересекаются, пилот подтягивает ноги для предотвращения преждевременного противодействия своего веса продолжающемуся восходящему полету летательного аппарата и рычажному воздействию крыльев. В этой фазе крылья достигают своей максимальной отрицательной нагрузки, и момент рычажного воздействия вверх завершается. Возникающее при обратном махе крыльев противоположное рычажное воздействие пилот может и должен компенсировать в конце этой фазы посредством полного разворота рулей на концах крыльев, чтобы вслед за этим поток воздуха оттолкнул обе области II крыльев друг от друга и крылья вновь были вынуждены распрямиться. Одновременно, рама кабины находится под максимальной отрицательной нагрузкой, которая в дальнейшем разряжается и, тем самым, усиливает (поддерживает) мах крыльев вверх.S) Траектория полета пилота становится еще более пологой, и он подтягивает ноги в направлении собственного центра тяжести для того, чтобы не противодействовать продолжающемуся восходящему полету летательного аппарата. В конце этой фазы пилот посредством руля высоты переведет летательный аппарат из восходящего полета в направление горизонтального режима полета. А) Рама кабины преодолела свою максимальную отрицательную нагрузку. Оба лонжерона рамы достигли своей максимальной положительной стреловидности. Всельное движение продолжается. Фиг. 11 А-С:V) Пилот переставил рули на концах крыльев таким образом, что при поддержке разряжающейся отрицательной нагрузки они заставляют крылья вновь распрямляться. При этом они усиливают ставший теперь умеренным восходящий полет. Пилот вновь подтягивает ноги для того, чтобы не препятствовать умеренному восходящему полету летательного аппарата.S) Теперь пилот находится в горизонтальной траектории полета и вновь подтягивает ноги. Таким образом, пилот и летательный аппарат сближаются друг с другом. Руль высоты заставляет летательный аппарат лететь в горизонтальном направлении. А) Отрицательная нагрузка на раме кабины начинает уменьшаться. Таким образом, рама усиливает(поддерживает) мах крыльев вверх. Теперь концы крыльев двигаются в ходе весельного движения вперед и вверх. Фиг. 12 А-С:V) Теперь траектории полета летательного аппарата и пилота (в точке его центра тяжести) сровнялись, и вес пилота начинает усиливать мах крыльев вверх относительно корпуса и уменьшение отрицательной нагрузки лонжеронов, которые сейчас находят контропору в постепенно увеличивающемся весе пилота. Пилот продолжает подтягивать ноги, при этом теперь основной причиной этого является его стремление занять благоприятное с точки зрения биомеханики исходное положение для перехода к следующей фазе ускорения массы. Постепенно отрицательная нагрузка падает до нуля.S) Руль высоты находится в нейтральном положении и удерживает летательный аппарат при легком кабрировании в горизонтальном полете. Пилот вновь подтягивает ноги. Рули на концах крыльев установлены так, чтобы заставить крылья распрямиться. А) Рама кабины находится не под нагрузкой. Вскоре концы крыльев занимают нейтральную позицию рядом с пилотом. Фиг. 13 А-С:V) Теперь рама кабины и крылья находятся не под нагрузкой. Вес пилота, размах лонжеронов и попрежнему установленные на концах крыльев рули заставляют крылья распрямляться. Пилот совсем подтянул ноги и выжидает момент для подскока.S) Руль высоты находится в нейтральном положении и удерживает летательный аппарат при легком кабрировании в горизонтальном полете. Проецируемая траектория полета пилота направлена теперь вниз, и летательный аппарат отклоняется от нее. Летательный аппарат и пилот теряют энергию. Они замедляют свое движение, но удерживают высоту, в то время как на крыльях в конце этой фазы начинает создаваться положительная нагрузка. Теперь концы крыльев также находятся на уровне бедер пилота и рядом с ними. В конце этой фазы пилот начинает перемещать свое тело вперед. Посредством такого перемещения общего центра тяжести пилот добивается того, что летательный аппарат опускает носовую часть без использования руля высоты. А) На раме кабины увеличивается нагрузка. Несмотря на аэродинамическое сопротивление, конструктивное решение лонжеронов обеспечивает им отрицательную стреловидность. Фиг. 14 А-С:V) Рама кабины и крылья продолжают увеличивать нагрузку. Вес пилота, размах лонжеронов и попрежнему установленные на концах крыльев рули заставляют крылья и далее распрямляться. В конце этой фазы пилот начинает распрямлять ноги для ускорения своего тела. Он совершает прыжок вперед и вверх.S) Теперь летательный аппарат медленно набирает скорость, так как он летит с незначительным снижением. Области II крыльев заставляют крылья распрямиться и находятся теперь сбоку рядом с пилотом. А) Рама кабины создает положительную нагрузку. Конструктивное решение рамы позволяет ей таким образом привести лонжероны в отрицательное стреловидное положение. Фиг. 15 А-С:V) Теперь рама кабины достигла своей максимальной положительной нагрузки. Теперь крылья достигли своей максимальной положительной нагрузки. Благодаря их длинной протяженности и их горизонтальному положению они имеют теперь наибольшую площадь проекции и служат, тем самым, в качестве оптимальной контропоры для уже начинающегося ускорения тела пилота, который устремляется вверх.S) Руль высоты находится в нейтральном положении, и летательный аппарат находится в незначительном снижающемся полете. За счет созданной пилотом энергии система орнитоптер/пилот набирает скорость. Пилот устремляется вверх и, тем самым, начинает вводить энергию в систему. Рули на концах крыльев установлены по-прежнему и создают подъемную силу для того, чтобы несколько противодействовать потере высоты и продолжать создавать положительную нагрузку на раме и крыльях. А) Теперь рама кабины находится под максимальной положительной нагрузкой. В этой фазе отри-6 018859 цательная стреловидность выражена наибольшим образом. Описанные выше фазы и последовательности движений непосредственно переходят в описания процессов к фиг. 6 А-С и так далее. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Летательный аппарат с машущим крылом, приводимый в движение мышечной силой пилота, содержащий корпус (5),пару машущих крыльев, которые в удаленной от корпуса (5) внешней части (II) имеют изменяемый профиль или руль, позволяющий изменять подъемную силу при заданном потоке, и горизонтальное оперение с отклоняемым рулем высоты (8), причем корпус (5) и жестко соединенная с ним пара машущих крыльев выполнены из упругого материала со степенью упругости, которая делает возможным машущее движение пары крыльев, машущие крылья в состоянии покоя (3) изогнуты вниз, а упругость рассчитана так, чтобы под весом пилота машущие крылья в полете возвращались в нейтральное положение (2), корпус (5) выполнен таким образом, чтобы разместить пилота в вертикальном положении по отношению к продольной оси корпуса так, чтобы посредством вытягивания и подтягивания ног пилот мог пофазно нагружать и разгружать летательный аппарат, а летательный аппарат оснащен также механическими устройствами, которые позволяют приводить в действие изменяемые внешние части (II) крыльев и изменять отклонение руля высоты синфазно с движением машущих крыльев. 2. Летательный аппарат с машущим крылом по п.1, корпус (5) которого выполнен упругим в форме рамы, которая окружает пилота по меньшей мере с двух сторон и на которой закреплены машущие крылья. 3. Летательный аппарат с машущим крылом по п.2, в котором корпус (5) выполнен с возможностью упругой деформации поперек продольной оси летательного аппарата. 4. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором корпус(5) и крылья образованы, по меньшей мере, частично упругим монококом. 5. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором изменяемые внешние части (II) крыльев образованы по меньшей мере одним рулем в области концевой кромки крыла. 6. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором машущие крылья имеют один или несколько параллельных лонжеронов, которые связаны с корпусом (5) и простираются, по меньшей мере, до внешних частей крыльев. 7. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором управление изменяемыми внешними частями крыльев и/или отклонением руля высоты осуществляется пилотом вручную посредством тяг управления и/или тросовых приводов. 8. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором обшивка машущих крыльев выполнена с возможностью изменения своей формы при движении внешних частей(II) крыльев. 9. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором присутствует демпфирующий элемент корпуса, который смягчает его вибрацию. 10. Летательный аппарат с машущим крылом по п.9, в котором демпфирующий элемент корпуса выполнен с возможностью настройки. 11. Летательный аппарат с машущим крылом по одному из предыдущих пунктов, в котором упругость машущих крыльев вдоль одного или нескольких лонжеронов крыла изменяется. 12. Летательный аппарат с машущим крылом по п.11, в котором упругость машущего крыла увеличивается на участке плоскости между расположенной ближе к корпусу точкой (а) и более удаленной от корпуса точкой (b) и/или упругость уменьшается на другом участке между расположенной ближе к корпусу точкой (b) и более удаленной от корпуса точкой (с). 13. Способ эксплуатации летательного аппарата по одному из предыдущих пунктов, характеризующийся тем, что пилот движением ног пофазно нагружает и разгружает летательный аппарат. 14. Способ по п.13, в котором при синфазном нагружении и разгружении летательного аппарата пилотом приводится в действие изменяемая внешняя часть (II) крыла. 15. Способ по п.13 или 14, в котором пилот пофазно полностью разгружает летательный аппарат. 16. Способ по одному из пп.13-15, в котором управление летательным аппаратом осуществляется посредством горизонтального смещения тела пилота относительно продольной и поперечной оси корпуса летательного аппарата.
МПК / Метки
МПК: B64C 33/00
Метки: аппарат, движение, крылом, приводимый, летательный, силой, пилота, машущим, мышечной
Код ссылки
<a href="https://eas.patents.su/14-18859-letatelnyjj-apparat-s-mashushhim-krylom-privodimyjj-v-dvizhenie-myshechnojj-silojj-pilota.html" rel="bookmark" title="База патентов Евразийского Союза">Летательный аппарат с машущим крылом, приводимый в движение мышечной силой пилота</a>
Крылатый летательный аппарат с флюгерным горизонтальным оперением
Номер патента: 8818
Опубликовано: 31.08.2007
Автор: Юрконенко Алексей Николаевич
МПК: B64C 5/00
Метки: крылатый, аппарат, оперением, летательный, флюгерным, горизонтальным
Формула / Реферат:
1. Крылатый летательный аппарат с флюгерным горизонтальным оперением, имеющим производную коэффициента подъемной силы по углу атаки крылатого летательного аппарата, равную или примерно равную нулю , и включающим в себя цельноповоротную несущую поверхность (5) и установленную на ней цельноповоротную управляющую поверхность (6) с возможностью изменения угла ее установки, отличающийся тем, что при расположении центра давления флюгерного...
Универсальный высокоманевренный летательный аппарат
Номер патента: 16905
Опубликовано: 30.08.2012
Автор: Хорьков Николай Федорович
МПК: B64B 1/20, B64C 39/06
Метки: летательный, высокоманевренный, аппарат, универсальный
Формула / Реферат:
1. Универсальный высокоманевренный летательный аппарат, содержащий корпус торообразной формы, выполненный с радиальными проемами, с размещенными в них поворотными устройствами, на каждом из которых установлены с возможностью поворота поворотная платформа с двигателем и плоскостью-крылом, грузовые отсеки, силовую установку, переднюю и заднюю кабины экипажа, систему управления и органы приземления, отличающийся тем, что внутри центрального отсека...
Индивидуальный летательный аппарат
Номер патента: 12396
Опубликовано: 30.10.2009
Автор: Мартин Гленн Неил
МПК: B64C 29/00, B64C 27/08
Метки: аппарат, летательный, индивидуальный
Формула / Реферат:
1. Индивидуальный летательный аппарат, включающий корпус, прикрепляемый к пилоту; по меньшей мере одну пару вентиляторов, при этом один вентилятор из пары установлен с одной стороны корпуса и второй вентилятор из пары установлен на противоположной стороне корпуса; в котором каждый вентилятор вращается вокруг оси вращения, при этом ось вращения каждого вентилятора неподвижна по отношению к корпусу; и по меньшей мере один двигатель, установленный...
Высокоскоростной летательный аппарат
Номер патента: 10321
Опубликовано: 29.08.2008
Автор: Нейджи Имре
МПК: B64B 1/34
Метки: высокоскоростной, летательный, аппарат
Формула / Реферат:
1. Высокоскоростной летательный аппарат, конструкция которого содержит: а) продольные многочисленные надуваемые камеры, скомпонованные в многочисленные пустотелые поддерживающие друг друга блоки, образующие центрально расположенный туннель для пассажирского или грузового отсека, б) кабины на конусообразной жёсткой раме, прикрепляемые к головному и хвостовому концам пассажирского или грузового отсека, в) высокомощные многочисленные двигатели,...
Летательный аппарат
Номер патента: 14867
Опубликовано: 28.02.2011
Автор: Гоуслинг Харри Джордж Деннис
МПК: B64C 39/02, B64C 39/06
Метки: летательный, аппарат
Формула / Реферат:
1. Летательный аппарат, имеющий крыло-фюзеляж, которое определяет ось крыла-фюзеляжа и представляется, в основном, кольцевым, если смотреть на него вдоль оси крыла-фюзеляжа, внутреннее кольцевое пространство, определяющее канал, открытый на обоих концах; систему тяги, содержащую одну или несколько пар двигательных установок, при этом каждая пара имеет первую двигательную установку, установленную на крыле-фюзеляже и расположенную на первой...
Предыдущий патент: Содействие рулевому управлению задним самоустанавливающимся колесом на рабочей машине
Следующий патент: Вакцинные композиции, содержащие сапониновый адъювант
Случайный патент: Дозатор жидкости автоматический