Тяжелая вращающаяся технологическая машина
Формула / Реферат
1. Тяжелая вращающаяся технологическая машина (Р), такая как, например, турбина или пропеллер, с системой для управления скоростью вращения и мощностью, причем указанная машина (Р) соединена по меньшей мере с одним двигателем или генератором (М1) с помощью вала и выполнена с возможностью вращения со скоростью вращения, задаваемой указанным двигателем или генератором (М1),
при этом двигатель или генератор (М1) соединен с управляющей системой (С), регулирующей скорость его вращения,
при этом указанный вал, соединяющий технологическую машину (Р) с указанным по меньшей мере одним двигателем или генератором (М1), образует ось вращения технологической машины, и
вращающаяся технологическая машина (Р) содержит устройство (PC) управления нагрузкой, выполненное с возможностью регулировки, причем управляющая система (С) соединена с указанной машиной (Р) и предназначена для контроля за устройством (PC) управления нагрузкой в машине (Р),
отличающаяся тем, что управляющая система (С) присоединена к первому щиту (U1) управления и предназначена для управления им, причем первый щит (U1) управления соединен с двигателем или генератором (М1) и предназначен для управления им, при этом указанный первый щит (U1) управления содержит по меньшей мере одну группу тиристоров (Т1) для достижения с их помощью плавных переходов между несколькими выбираемыми скоростями вращения и снижения затрат энергии путем плавной регулировки мощности и скорости вращения двигателя или генератора (М1) в соответствии с изменяющейся потребностью в мощности.
2. Технологическая машина по п.1, в которой первый щит (U1) управления дополнительно содержит по меньшей мере один датчик (CS), например датчик тока.
3. Технологическая машина по п.2, в которой первый щит (U1) управления дополнительно содержит по меньшей мере два замыкателя (S1, S2).
4. Технологическая машина по п.1, в которой щит (U1) управления содержит по меньшей мере две группы тиристоров (Т2, Т3) и по меньшей мере два датчика (CS).
5. Технологическая машина по п.1, в которой щит (U1) управления дополнительно содержит по меньшей мере один преобразователь (FC) частоты и по меньшей мере один датчик (CS).
6. Технологическая машина по п.1, содержащая дополнительно по меньшей мере один второй двигатель или генератор (М2), который соединен, по меньшей мере, с первым двигателем или генератором (М1) с помощью вала, причем второй двигатель или генератор (М2) выполнен с возможностью содействия первому двигателю или генератору (М1) в достижении высоких скоростей вращения.
7. Технологическая машина по п.6, в которой первый двигатель или генератор (М1) и второй двигатель или генератор (М2) соединены соответственно с первым и вторым щитами (U1, U2) управления и выполнены с возможностью управления ими.
8. Технологическая машина по п.7, в которой первый двигатель или генератор (М1) имеет по меньшей мере одну первую скорость (Н) вращения, а второй двигатель или генератор (М2) имеет по меньшей мере одну вторую скорость (L) вращения.
9. Технологическая машина по п.6, в которой первый двигатель или генератор (М1) имеет мощность в диапазоне между значением, превышающим мощность второго двигателя или генератора (М2) в три раза, и значением, превышающим мощность второго двигателя или генератора (М2) в десять раз.
10. Технологическая машина по п.1, в которой тиристоры (Т1, Т2, Т3) представляют собой трехфазные встречно включенные тиристоры или эквивалентные по мощности полупроводники.
11. Технологическая машина по п.1, которая предназначена для присоединения к внешнему источнику питания с частотой 50 Гц.
12. Технологическая машина по п.1, мощность которой превышает 100 кВт.
13. Технологическая машина по п.1, в которой управляющая система (С) дополнительно соединена по меньшей мере с одной муфтой (CL) и предназначена для управления ею.
14. Технологическая машина по п.1, которая соединена с зубчатой передачей (G), которая соединена с двигателем или генератором (М1).
15. Технологическая машина по п.6, которая соединена с зубчатой передачей (G), которая соединена с первым двигателем или генератором (М1) и со вторым двигателем или генератором (М2).
16. Технологическая машина по п.1, к которой дополнительно присоединена система (RC) дистанционного управления.
17. Технологическая машина по п.1, в которой указанный по меньшей мере один двигатель или генератор (М1) присоединен к неэлектрическому двигателю (НМ) с помощью вала, причем указанный неэлектрический двигатель (НМ) управляется с помощью управляющей системы (С).
18. Технологическая машина по п.17, в которой неэлектрический двигатель (НМ) приводится в действие источником (S) питания.
19. Технологическая машина по п.17, в которой неэлектрический двигатель (НМ) соединен с датчиком (SP) скорости вращения.

Текст
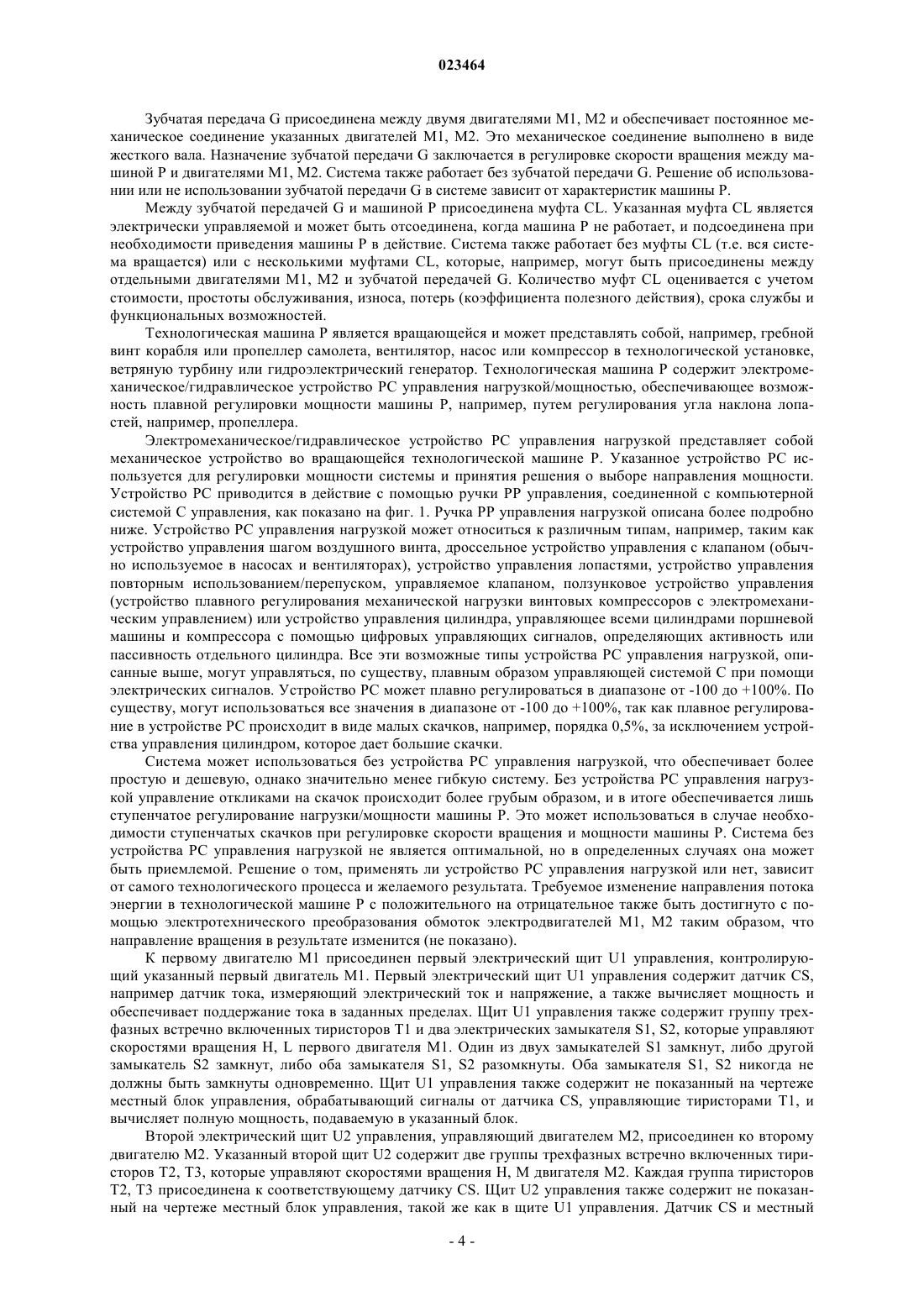
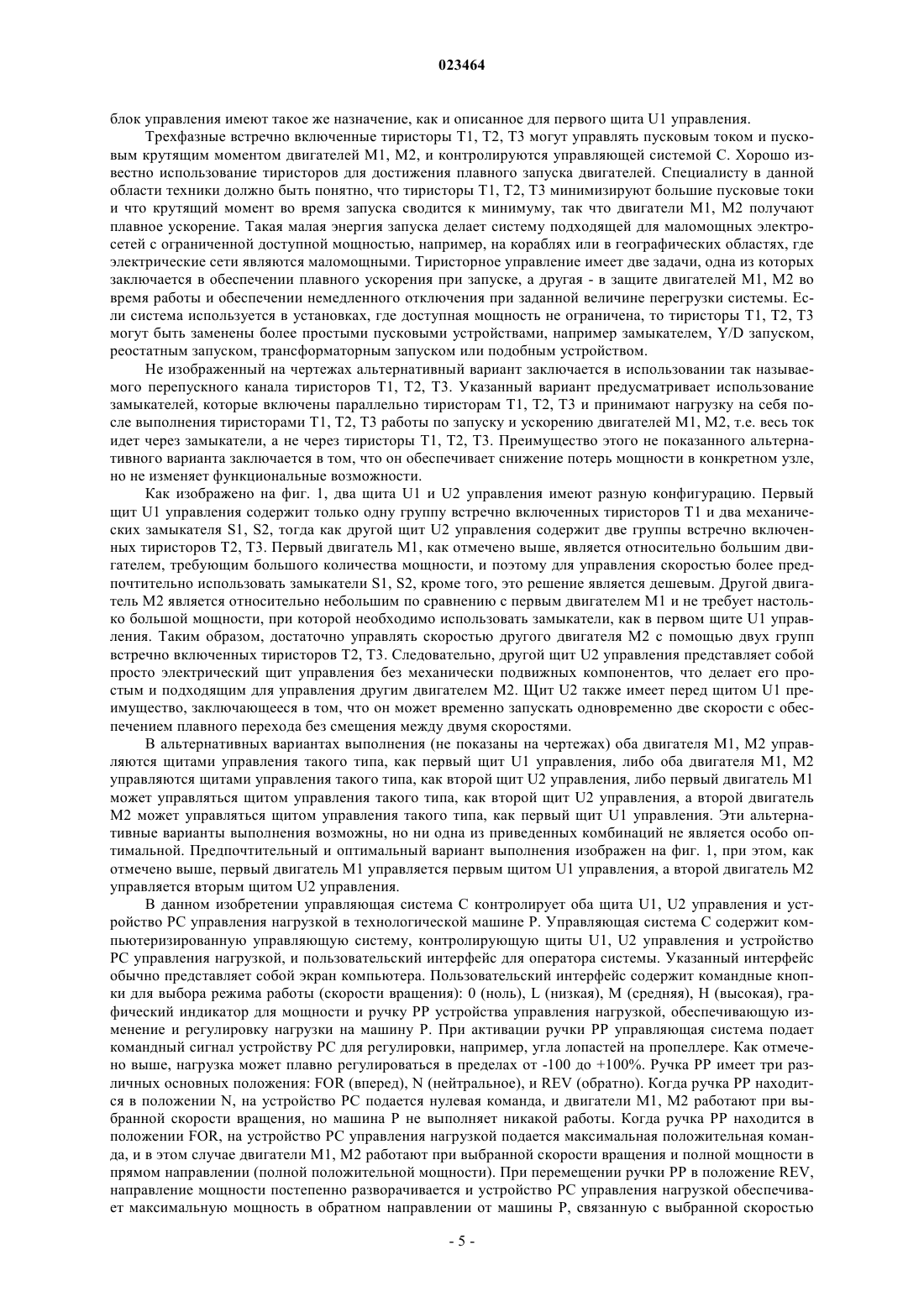
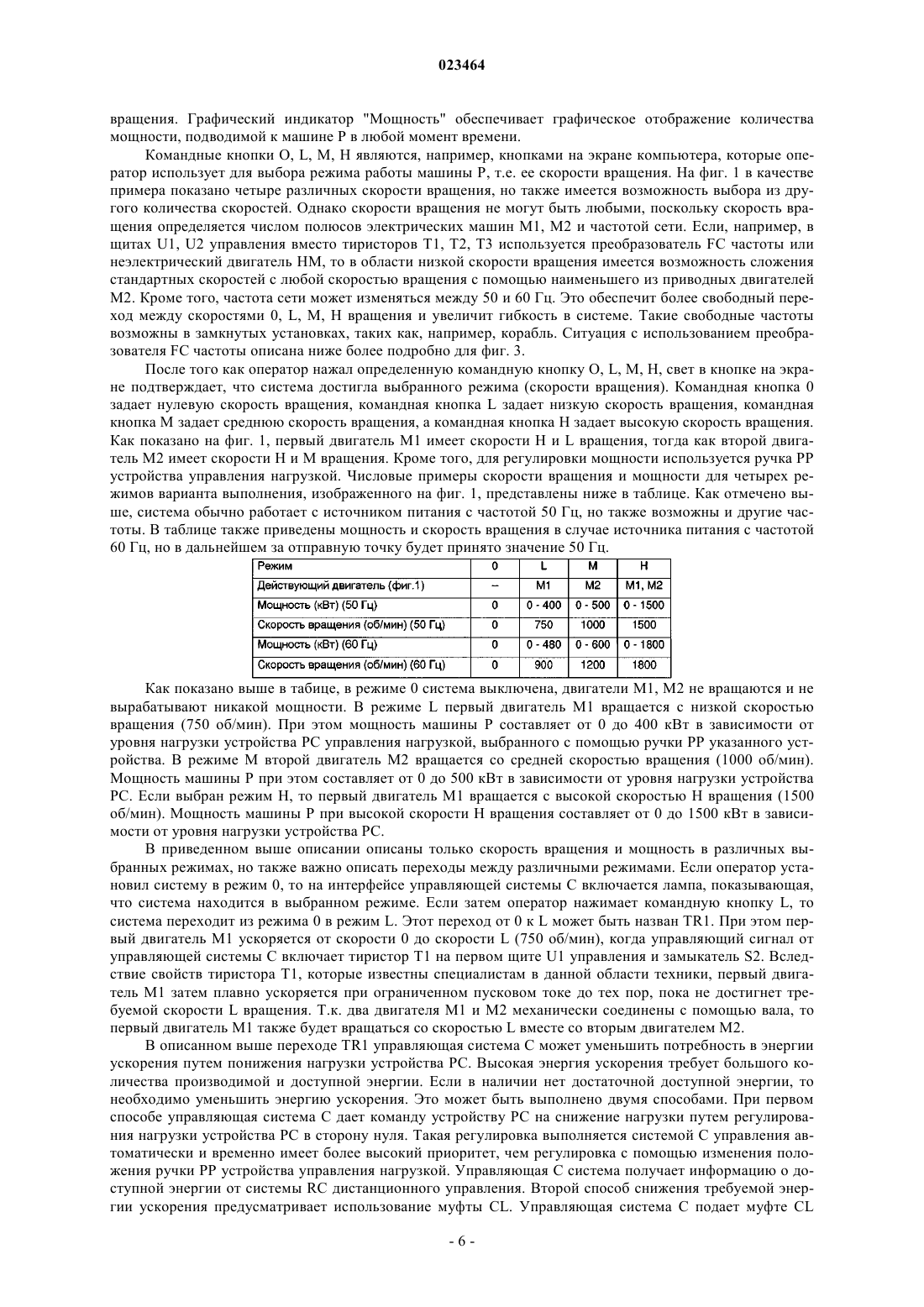
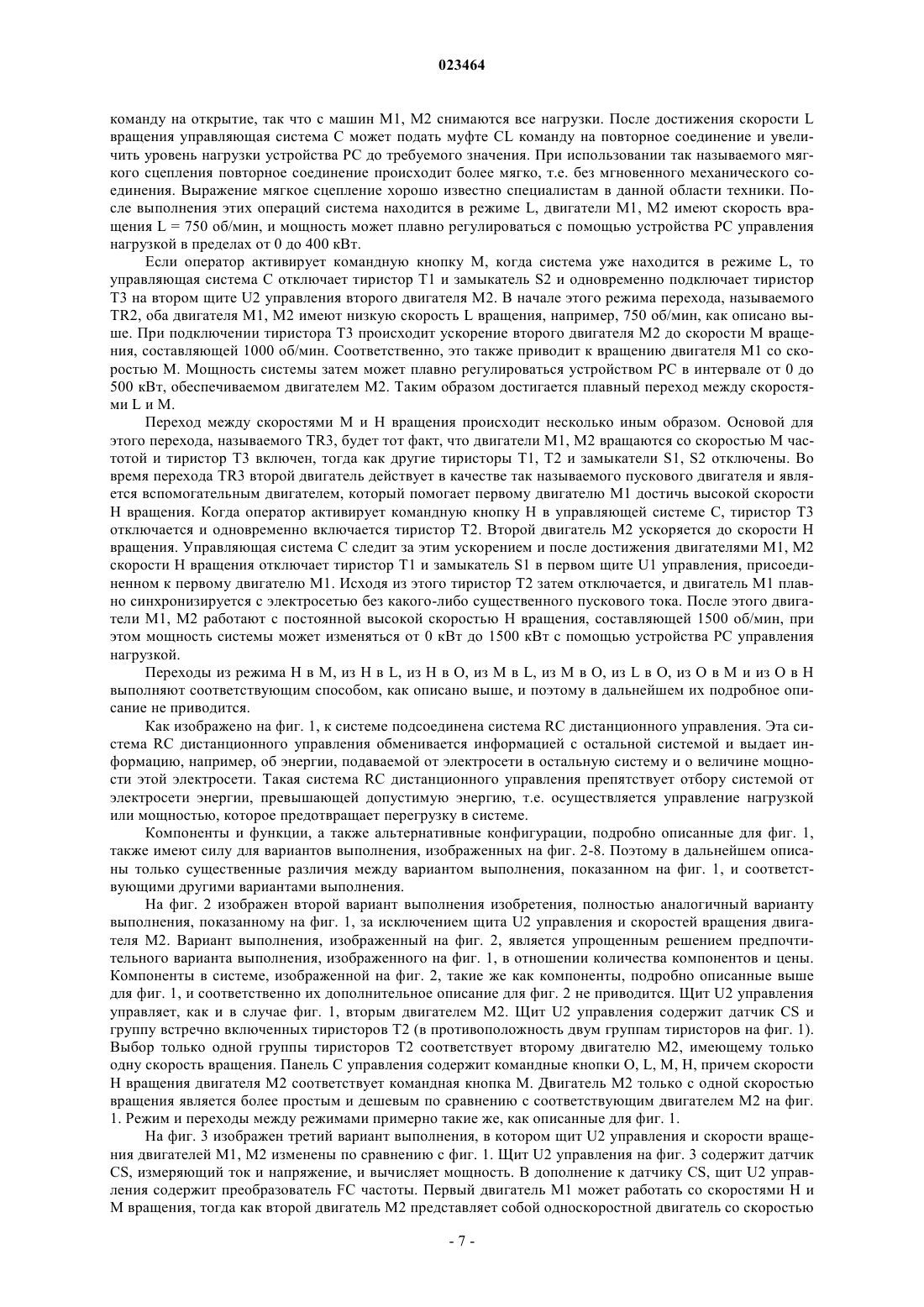
ТЯЖЕЛАЯ ВРАЩАЮЩАЯСЯ ТЕХНОЛОГИЧЕСКАЯ МАШИНА Изобретение относится к тяжелой вращающейся технологической машине (Р), например к турбине или пропеллеру, с системой управления скоростью вращения, причем указанная машина (Р) соединена по меньшей мере с одним двигателем (М 1) и выполнена с возможностью вращения с заданной скоростью вращения, задаваемой указанным двигателем (М 1), при этом двигатель(М 1) соединен с управляющей системой (С), регулирующей скорость его вращения. Вращательная технологическая машина (Р) содержит устройство (PC) управления нагрузкой, выполненное с возможностью регулировки, и к ней присоединена управляющая система (С). С помощью изобретения достигаются плавные переходы между несколькими выбираемыми скоростями вращения и снижение затрат энергии путем плавной регулировки размера и скорости вращения двигателя (М 1) в соответствии с изменяющейся потребностью в мощности.(71)(73) Заявитель и патентовладелец: ИН МОУШН АС (NO) Изобретение относится к тяжелым вращающимся технологическим машинами с системой управления скоростью вращения и мощностью, например к машинам с мощностью более 100 кВт. На сегодняшний день окружающая среда и климат являются важными аспектами, которые принимаются во внимание в большинстве регионов. Это особенно важно, среди прочего, в промышленной и транспортной отраслях и, следовательно, при рассмотрении снижения расхода электрической энергии,топлива и опасных для окружающей среды выбросов. Данное изобретение способствует эффективному использованию энергии в больших машинах и работе машин в энергетически эффективном режиме благодаря использованию элементов и их соединений таким образом, что запуск, остановка и работа машин происходят при эффективном использовании энергии, что также снижает вред, наносимый опасными для окружающей среды выбросами. Некоторые существующие системы для управления скоростью вращения и мощностью тяжелых машин, используемые, например, на кораблях, имеют нулевую или максимальную скорость вращения(100%) в дополнение к механическому управлению нагрузкой. При этом двигатели вращаются с максимальной частотой вращения даже тогда, когда судно стоит неподвижно, что создает механические потери, вызванные системой механической нагрузки. Кроме того, при такой форме механического управления возникает проблема, связанная с шумом. В существующих электромеханических системах часто существуют проблемы с бросками пускового тока. Когда электрический двигатель соединен с прямым пуском, бросок пускового тока показывает величину в десять раз большую, чем так называемый номинальный ток, т.е. двигателю требуется очень большой ток для того, чтобы иметь возможность выполнить такое быстрое и значительное ускорение. В зависимости от нагрузки двигателя эта ситуация может длиться в течение временного промежутка, например от половины секунды до нескольких секунд. Такое сильное ускорение за короткое время требует большой доступной мощности, которая может быть снижена при выполнении ускорения более управляемым образом. В патентной публикации США 4525655 описана электрическая приводная система с двумя электрическими двигателями, одним большим и одним малым, которые механически присоединены к общему валу через сложную планетарную систему шестерен. Малый двигатель используется для ускорения большого двигателя в начале процесса, что предотвращает большой расход мощности при запуске двигателя. Тахометр посылает сигнал на схему сравнения, контролирующую мощность, подаваемую к двум двигателям. Когда скорость обоих двигателей становится одинаковой, блок управления уравнивает мощность, подаваемую к обоим двигателями. Предпочтительно мощность одного из двигателей в два раза превышает мощность другого. В патентной публикации Великобритании 101809 описана система для запуска синхронной машины с помощью пускового двигателя. Пусковой двигатель выключается с помощью механического выключателя после того, как он помог синхронному двигателю достичь требуемой скорости. Эта публикация датирована 1916 годом и показывает, что принцип пускового двигателя известен уже давно. Патентная публикация Великобритании 539203 относится к изобретению, имеющему отношение к приводам двух электрических двигателей (переменного или постоянного тока), одного малого и одного большого, для использования в печатных прессах или других машинах. Указанные два двигателя соединены друг с другом с помощью вала и электромагнитной муфты. Для разделения двигателей используется разрыв соединения. Для запуска двигателей с вращением в противоположном направлении используются реверсирующие переключатели. Малый двигатель приводит печатный пресс в действие с помощью муфты, а затем большой двигатель принимает управление работой печатного пресса на себя и отсоединяется от малого двигателя с помощью муфты. В патентной публикации США 6297610 описана система, которая может использоваться для управления несколькими электрическими блоками. Таким образом, существует необходимость в электрической приводной системе, которая снижает или устраняет потери механической нагрузки в то время, когда машина не выполняет никакой работы, при этом управление двигателями является простым, экономически выгодным и не требует обслуживания. Представляющий проблему высокий уровень шума при работе двигателя на холостом ходу предпочтительно должен быть понижен. То же самое относится к устранению электрических помех, представляющих проблему во многих альтернативных типах приводных систем. Кроме того, существует необходимость в системах, в которых в то же время машины плавно ускоряются между различными скоростями вращения, поскольку к ним подается лишь необходимое количество мощности, требуемое для ускорения. Данное изобретение решает упомянутые выше проблемы путем создания системы для плавной регулировки скорости вращения и мощности в тяжелых машинах, которая имеет компактную и простую конструкцию, малое количество сложных узлов, не создает никаких электрических помех и является экономически выгодной по сравнению с существующими системами. Такая система содержит компьютеризированную управляющую систему, электрические щиты управления и двигатели, соединенные с управляемой технологической машиной. Система, решающая упомянутые выше проблемы, может использоваться, например, для управления вентиляторами, насосами или компрессорами в перерабатывающих установках, для управления пропеллерами или винтами с регулируемыми лопастями на самоле-1 023464 тах или кораблях, ветряными турбинами или гидроэлектрическими генераторами. Указанная выше цель изобретения достигается путем создания системы, упомянутой выше и подробно охарактеризованной в прилагаемой формуле изобретения. Таким образом, в данном изобретении предложена вращающаяся технологическая машина, такая как, например, турбина или пропеллер, с системой для управления скоростью вращения и мощностью,причем указанная машина соединена с по меньшей мере одним двигателем или генератором с помощью вала и выполнена с возможностью вращения со скоростью вращения, задаваемой указанным двигателем или генератором. Двигатель или генератор соединен с управляющей системой, регулирующей скорость его вращения. Указанный вал, соединяющий технологическую машину с указанным по меньшей мере одним двигателем или генератором, образует ось вращения технологической машины. Вращающаяся технологическая машина содержит устройство управления нагрузкой, выполненное с возможностью регулировки. Управляющая система соединена с указанной машиной и предназначена для контроля за устройством управления нагрузки в машине. Таким образом, с помощью изобретения достигаются плавные переходы между несколькими выбираемыми скоростями вращения и снижение затрат энергии путем плавной регулировки мощности и скорости вращения двигателя в соответствии с изменяющейся потребностью в мощности. Управляющая система присоединена к первому щиту управления и предназначена для управления им, причем первый щит управления соединен с двигателем или генератором и предназначен для управления им. Первый щит управления содержит по меньшей мере одну группу тиристоров. Тиристоры обеспечивают возможность управления броском тока и пусковым крутящим моментом, так что система подходит для использования в установках с ограниченной доступной электрической мощностью, и достижения с их помощью плавных переходов между несколькими выбираемыми скоростями вращения и снижения затрат энергии путем плавной регулировки мощности и скорости вращения двигателя или генератора в соответствии с изменяющейся потребностью в мощности. В одном предпочтительном варианте выполнения изобретения первый щит управления содержит по меньшей мере один датчик, например датчик тока с сопутствующей электронной схемой управления. В дополнительном предпочтительном варианте выполнения изобретения щит управления также содержит по меньшей мере два замыкателя, так что двигатель или генераторы получают сигнал, указывающий на то, какую скорость вращения они должны иметь. Замыкатели могут работать с относительно большим двигателем, требующим большой мощности. В еще одном предпочтительном варианте выполнения изобретения щит управления содержит по меньшей мере две группы тиристоров и по меньшей мере два датчика. Тиристоры обеспечивают возможность управления броском тока и броском крутящего момента двигателя или генератора, так что система подходит для использования в установках с ограниченной доступной электрической мощностью. В другом предпочтительном варианте выполнения изобретения щит управления содержит по меньшей мере один преобразователь частоты и по меньшей мере один датчик, так что может выполняться плавная регулировка скорости вращения двигателя или генератора. В еще одном предпочтительном варианте выполнения изобретения технологическая машина содержит по меньшей мере один первый двигатель или генератор и по меньшей мере один второй двигатель или генератор, соединенные с помощью вала. Второй двигатель или генератор предназначен для содействия первому двигателю в достижении высоких скоростей вращения, так что стартовая нагрузка на первый двигатель или генератор не становится слишком большой, а ускорение происходит плавным и регулируемым образом. В еще одном варианте выполнения изобретения первый двигатель или генератор и второй двигатель или генератор соединены соответственно с первым и вторым щитами управления и выполнены с возможностью управления ими. В еще одном варианте выполнения изобретения первый двигатель или генератор имеет по меньшей мере одну первую скорость, а второй двигатель или генератор имеет по меньшей мере одну вторую скорость. В еще одном варианте выполнения изобретения первый двигатель или генератор имеет мощность в диапазоне между значением, превышающим мощность второго двигателя или генератора в три раза, и значением, превышающим мощность второго двигателя или генератора в десять раз. В еще одном предпочтительном варианте выполнения изобретения тиристоры представляют собой трехфазные встречно включенные тиристоры или эквивалентные по мощности полупроводники. В еще одном предпочтительном варианте выполнения изобретения технологическая машина предназначена для присоединения к внешнему источнику питания с частотой 50 Гц. В еще одном предпочтительном варианте выполнения изобретения мощность вращающейся технологической машины превышает, например, 100 кВт. В еще одном предпочтительном варианте выполнения изобретения технологическая машина соединена с по меньшей мере одной муфтой и предназначена для управления указанной муфтой с обеспечением подключения нагрузки к двигателю или ее отключения от него. В еще одном предпочтительном варианте выполнения изобретения вращающаяся технологическая машина соединена с зубчатой передачей, соединенной с двигателем или генератором. Зубчатая передача обеспечивает возможность регулировки скорости вращения между машиной и двигателем или генератором. В другом варианте выполнения изобретения вращающаяся технологическая машина соединена с зубчатой передачей. Зубчатая передача соединена с первым двигателем или генератором и со вторым двигателем или генератором, так что вращательная скорость между машиной и двигателями или генераторами может регулироваться. В еще одном варианте выполнения изобретения к технологической машине присоединена система дистанционного управления, так что указанная управляющая система может передавать и принимать информацию. В еще одном варианте выполнения изобретения указанный по меньшей мере один двигатель или генератор присоединен к неэлектрическому двигателю или генератору с помощью вала, причем этот неэлектрический двигатель управляется с помощью управляющей системы. В другом варианте выполнения изобретения неэлектрический двигатель приводится в действие с помощью неэлектрического источника питания, например источника масла под давлением. В еще одном варианте выполнения изобретения неэлектрический двигатель соединен с датчиком скорости вращения, так что производительность и режим работы неэлектрического двигателя могут отслеживаться и регулироваться. Далее приведено подробное описание изобретения со ссылками на прилагаемые чертежи, иллюстрирующие изобретение с помощью примеров. Фиг. 1 изображает схематический чертеж, показывающий предпочтительный первый вариант выполнения технологической машины в соответствии с данным изобретением; фиг. 2 - схематический чертеж, показывающий второй вариант выполнения технологической машины в соответствии с данным изобретением; фиг. 3 - схематический чертеж, показывающий третий вариант выполнения технологической машины в соответствии с данным изобретением; фиг. 4 - схематический чертеж, показывающий четвертый вариант выполнения технологической машины в соответствии с данным изобретением; фиг. 5 - схематический чертеж, показывающий возможное альтернативное расположение двигателей или генераторов во всех вариантах выполнения; фиг. 6 - схематический чертеж, показывающий пятый вариант выполнения технологической машины в соответствии с данным изобретением; фиг. 7 - схематический чертеж, показывающий шестой вариант выполнения технологической машины в соответствии с данным изобретением; фиг. 8 - схематический чертеж, показывающий седьмой вариант выполнения технологической машины в соответствии с данным изобретением. Фиг. 1 изображает схематический чертеж, показывающий предпочтительный вариант выполнения системы технологической машины в соответствии с данным изобретением. Система, изображенная на фиг. 1, является трехфазной системой переменного тока, питаемой от внешнего источника. Внешний источник питания обычно имеет частоту 50 Гц, но также могут использоваться другие частоты, например 60 Гц. Ток правильной синусоидальной формы поступает непосредственно от электросети и подается к системе, таким образом, отсутствует необходимость, например, в преобразователях или фильтрации,поскольку система не создает существенных электрических помех. Некоторые типы электрических машин могут работать как в качестве двигателей, так и в качестве генераторов, в зависимости лишь от направления сил, действующих на машинный вал. По этой причине на фиг. 1-8 используется обозначениеM1/G, что означает двигатель или генератор. Система содержит два трехфазных (3) двухскоростных электродвигателя М 1, М 2, предпочтительно асинхронных, которые механически соединены с зубчатой передачей G и приводят в действие технологическую машину Р. Первый двигатель М 1 имеет две скорости Н, L вращения, и второй двигатель М 2 имеет две скорости Н, М вращения. Первый двигатель М 1 является большим двигателем по сравнению с другим двигателем М 2, т.е. мощность первого двигателя М 1 превышает мощность другого двигателя М 2. Например, при 4-полюсной работе первый, большой двигатель М 1, имеет максимальную мощность 1500 кВт, а при 8-полюсной работе его мощность составляет 400 кВт. Другой, малый двигатель М 2, при 4 полюсной работе имеет максимальную мощность 200 кВт, а при 6-полюсной работе его максимальная мощность составляет 500 кВт. Все вышеупомянутые численные значения мощности приведены для случая источника питания трехфазным током с частотой 50 Гц. При использовании источника питания с другой частотой приведенные выше числовые примеры для максимальной мощности будут иметь другие значения. Как отмечено выше, двигатели предпочтительно являются асинхронными двигателями, но также возможно использование других типов двигателей, таких как, например, синхронные двигатели. Если данное изобретение применяется к электрогенераторам, то двигатели должны быть генераторами, и тогда система будет отдавать энергию назад в электросеть, а не только потреблять ее. Кроме того, возможна комбинированная работа системы в так называемом режиме двигатель/генератор, т.е. поток энергии может идти попеременно в обоих направлениях. Зубчатая передача G присоединена между двумя двигателями М 1, М 2 и обеспечивает постоянное механическое соединение указанных двигателей М 1, М 2. Это механическое соединение выполнено в виде жесткого вала. Назначение зубчатой передачи G заключается в регулировке скорости вращения между машиной Р и двигателями М 1, М 2. Система также работает без зубчатой передачи G. Решение об использовании или не использовании зубчатой передачи G в системе зависит от характеристик машины Р. Между зубчатой передачей G и машиной Р присоединена муфта CL. Указанная муфта CL является электрически управляемой и может быть отсоединена, когда машина Р не работает, и подсоединена при необходимости приведения машины Р в действие. Система также работает без муфты CL (т.е. вся система вращается) или с несколькими муфтами CL, которые, например, могут быть присоединены между отдельными двигателями М 1, М 2 и зубчатой передачей G. Количество муфт CL оценивается с учетом стоимости, простоты обслуживания, износа, потерь (коэффициента полезного действия), срока службы и функциональных возможностей. Технологическая машина Р является вращающейся и может представлять собой, например, гребной винт корабля или пропеллер самолета, вентилятор, насос или компрессор в технологической установке,ветряную турбину или гидроэлектрический генератор. Технологическая машина Р содержит электромеханическое/гидравлическое устройство PC управления нагрузкой/мощностью, обеспечивающее возможность плавной регулировки мощности машины Р, например, путем регулирования угла наклона лопастей, например, пропеллера. Электромеханическое/гидравлическое устройство PC управления нагрузкой представляет собой механическое устройство во вращающейся технологической машине Р. Указанное устройство PC используется для регулировки мощности системы и принятия решения о выборе направления мощности. Устройство PC приводится в действие с помощью ручки РР управления, соединенной с компьютерной системой С управления, как показано на фиг. 1. Ручка РР управления нагрузкой описана более подробно ниже. Устройство PC управления нагрузкой может относиться к различным типам, например, таким как устройство управления шагом воздушного винта, дроссельное устройство управления с клапаном (обычно используемое в насосах и вентиляторах), устройство управления лопастями, устройство управления повторным использованием/перепуском, управляемое клапаном, ползунковое устройство управления(устройство плавного регулирования механической нагрузки винтовых компрессоров с электромеханическим управлением) или устройство управления цилиндра, управляющее всеми цилиндрами поршневой машины и компрессора с помощью цифровых управляющих сигналов, определяющих активность или пассивность отдельного цилиндра. Все эти возможные типы устройства PC управления нагрузкой, описанные выше, могут управляться, по существу, плавным образом управляющей системой С при помощи электрических сигналов. Устройство PC может плавно регулироваться в диапазоне от -100 до +100%. По существу, могут использоваться все значения в диапазоне от -100 до +100%, так как плавное регулирование в устройстве PC происходит в виде малых скачков, например, порядка 0,5%, за исключением устройства управления цилиндром, которое дает большие скачки. Система может использоваться без устройства PC управления нагрузкой, что обеспечивает более простую и дешевую, однако значительно менее гибкую систему. Без устройства PC управления нагрузкой управление откликами на скачок происходит более грубым образом, и в итоге обеспечивается лишь ступенчатое регулирование нагрузки/мощности машины Р. Это может использоваться в случае необходимости ступенчатых скачков при регулировке скорости вращения и мощности машины Р. Система без устройства PC управления нагрузкой не является оптимальной, но в определенных случаях она может быть приемлемой. Решение о том, применять ли устройство PC управления нагрузкой или нет, зависит от самого технологического процесса и желаемого результата. Требуемое изменение направления потока энергии в технологической машине Р с положительного на отрицательное также быть достигнуто с помощью электротехнического преобразования обмоток электродвигателей М 1, М 2 таким образом, что направление вращения в результате изменится (не показано). К первому двигателю М 1 присоединен первый электрический щит U1 управления, контролирующий указанный первый двигатель М 1. Первый электрический щит U1 управления содержит датчик CS,например датчик тока, измеряющий электрический ток и напряжение, а также вычисляет мощность и обеспечивает поддержание тока в заданных пределах. Щит U1 управления также содержит группу трехфазных встречно включенных тиристоров Т 1 и два электрических замыкателя S1, S2, которые управляют скоростями вращения Н, L первого двигателя М 1. Один из двух замыкателей S1 замкнут, либо другой замыкатель S2 замкнут, либо оба замыкателя S1, S2 разомкнуты. Оба замыкателя S1, S2 никогда не должны быть замкнуты одновременно. Щит U1 управления также содержит не показанный на чертеже местный блок управления, обрабатывающий сигналы от датчика CS, управляющие тиристорами Т 1, и вычисляет полную мощность, подаваемую в указанный блок. Второй электрический щит U2 управления, управляющий двигателем М 2, присоединен ко второму двигателю М 2. Указанный второй щит U2 содержит две группы трехфазных встречно включенных тиристоров Т 2, Т 3, которые управляют скоростями вращения Н, М двигателя М 2. Каждая группа тиристоров Т 2, Т 3 присоединена к соответствующему датчику CS. Щит U2 управления также содержит не показанный на чертеже местный блок управления, такой же как в щите U1 управления. Датчик CS и местный блок управления имеют такое же назначение, как и описанное для первого щита U1 управления. Трехфазные встречно включенные тиристоры Т 1, Т 2, Т 3 могут управлять пусковым током и пусковым крутящим моментом двигателей М 1, М 2, и контролируются управляющей системой С. Хорошо известно использование тиристоров для достижения плавного запуска двигателей. Специалисту в данной области техники должно быть понятно, что тиристоры Т 1, Т 2, Т 3 минимизируют большие пусковые токи и что крутящий момент во время запуска сводится к минимуму, так что двигатели М 1, М 2 получают плавное ускорение. Такая малая энергия запуска делает систему подходящей для маломощных электросетей с ограниченной доступной мощностью, например, на кораблях или в географических областях, где электрические сети являются маломощными. Тиристорное управление имеет две задачи, одна из которых заключается в обеспечении плавного ускорения при запуске, а другая - в защите двигателей М 1, М 2 во время работы и обеспечении немедленного отключения при заданной величине перегрузки системы. Если система используется в установках, где доступная мощность не ограничена, то тиристоры Т 1, Т 2, Т 3 могут быть заменены более простыми пусковыми устройствами, например замыкателем, Y/D запуском,реостатным запуском, трансформаторным запуском или подобным устройством. Не изображенный на чертежах альтернативный вариант заключается в использовании так называемого перепускного канала тиристоров Т 1, Т 2, Т 3. Указанный вариант предусматривает использование замыкателей, которые включены параллельно тиристорам Т 1, Т 2, Т 3 и принимают нагрузку на себя после выполнения тиристорами Т 1, Т 2, Т 3 работы по запуску и ускорению двигателей М 1, М 2, т.е. весь ток идет через замыкатели, а не через тиристоры Т 1, Т 2, Т 3. Преимущество этого не показанного альтернативного варианта заключается в том, что он обеспечивает снижение потерь мощности в конкретном узле,но не изменяет функциональные возможности. Как изображено на фиг. 1, два щита U1 и U2 управления имеют разную конфигурацию. Первый щит U1 управления содержит только одну группу встречно включенных тиристоров Т 1 и два механических замыкателя S1, S2, тогда как другой щит U2 управления содержит две группы встречно включенных тиристоров Т 2, Т 3. Первый двигатель М 1, как отмечено выше, является относительно большим двигателем, требующим большого количества мощности, и поэтому для управления скоростью более предпочтительно использовать замыкатели S1, S2, кроме того, это решение является дешевым. Другой двигатель М 2 является относительно небольшим по сравнению с первым двигателем М 1 и не требует настолько большой мощности, при которой необходимо использовать замыкатели, как в первом щите U1 управления. Таким образом, достаточно управлять скоростью другого двигателя М 2 с помощью двух групп встречно включенных тиристоров Т 2, Т 3. Следовательно, другой щит U2 управления представляет собой просто электрический щит управления без механически подвижных компонентов, что делает его простым и подходящим для управления другим двигателем М 2. Щит U2 также имеет перед щитом U1 преимущество, заключающееся в том, что он может временно запускать одновременно две скорости с обеспечением плавного перехода без смещения между двумя скоростями. В альтернативных вариантах выполнения (не показаны на чертежах) оба двигателя М 1, М 2 управляются щитами управления такого типа, как первый щит U1 управления, либо оба двигателя М 1, М 2 управляются щитами управления такого типа, как второй щит U2 управления, либо первый двигатель М 1 может управляться щитом управления такого типа, как второй щит U2 управления, а второй двигатель М 2 может управляться щитом управления такого типа, как первый щит U1 управления. Эти альтернативные варианты выполнения возможны, но ни одна из приведенных комбинаций не является особо оптимальной. Предпочтительный и оптимальный вариант выполнения изображен на фиг. 1, при этом, как отмечено выше, первый двигатель М 1 управляется первым щитом U1 управления, а второй двигатель М 2 управляется вторым щитом U2 управления. В данном изобретении управляющая система С контролирует оба щита U1, U2 управления и устройство PC управления нагрузкой в технологической машине Р. Управляющая система С содержит компьютеризированную управляющую систему, контролирующую щиты U1, U2 управления и устройствоPC управления нагрузкой, и пользовательский интерфейс для оператора системы. Указанный интерфейс обычно представляет собой экран компьютера. Пользовательский интерфейс содержит командные кнопки для выбора режима работы (скорости вращения): 0 (ноль), L (низкая), М (средняя), Н (высокая), графический индикатор для мощности и ручку РР устройства управления нагрузкой, обеспечивающую изменение и регулировку нагрузки на машину Р. При активации ручки РР управляющая система подает командный сигнал устройству PC для регулировки, например, угла лопастей на пропеллере. Как отмечено выше, нагрузка может плавно регулироваться в пределах от -100 до +100%. Ручка РР имеет три различных основных положения: FOR (вперед), N (нейтральное), и REV (обратно). Когда ручка РР находится в положении N, на устройство PC подается нулевая команда, и двигатели М 1, М 2 работают при выбранной скорости вращения, но машина Р не выполняет никакой работы. Когда ручка РР находится в положении FOR, на устройство PC управления нагрузкой подается максимальная положительная команда, и в этом случае двигатели М 1, М 2 работают при выбранной скорости вращения и полной мощности в прямом направлении (полной положительной мощности). При перемещении ручки РР в положение REV,направление мощности постепенно разворачивается и устройство PC управления нагрузкой обеспечивает максимальную мощность в обратном направлении от машины Р, связанную с выбранной скоростью вращения. Графический индикатор "Мощность" обеспечивает графическое отображение количества мощности, подводимой к машине Р в любой момент времени. Командные кнопки O, L, М, Н являются, например, кнопками на экране компьютера, которые оператор использует для выбора режима работы машины Р, т.е. ее скорости вращения. На фиг. 1 в качестве примера показано четыре различных скорости вращения, но также имеется возможность выбора из другого количества скоростей. Однако скорости вращения не могут быть любыми, поскольку скорость вращения определяется числом полюсов электрических машин М 1, М 2 и частотой сети. Если, например, в щитах U1, U2 управления вместо тиристоров Т 1, Т 2, Т 3 используется преобразователь FC частоты или неэлектрический двигатель НМ, то в области низкой скорости вращения имеется возможность сложения стандартных скоростей с любой скоростью вращения с помощью наименьшего из приводных двигателей М 2. Кроме того, частота сети может изменяться между 50 и 60 Гц. Это обеспечит более свободный переход между скоростями 0, L, М, Н вращения и увеличит гибкость в системе. Такие свободные частоты возможны в замкнутых установках, таких как, например, корабль. Ситуация с использованием преобразователя FC частоты описана ниже более подробно для фиг. 3. После того как оператор нажал определенную командную кнопку O, L, М, Н, свет в кнопке на экране подтверждает, что система достигла выбранного режима (скорости вращения). Командная кнопка 0 задает нулевую скорость вращения, командная кнопка L задает низкую скорость вращения, командная кнопка М задает среднюю скорость вращения, а командная кнопка Н задает высокую скорость вращения. Как показано на фиг. 1, первый двигатель М 1 имеет скорости Н и L вращения, тогда как второй двигатель М 2 имеет скорости Н и М вращения. Кроме того, для регулировки мощности используется ручка РР устройства управления нагрузкой. Числовые примеры скорости вращения и мощности для четырех режимов варианта выполнения, изображенного на фиг. 1, представлены ниже в таблице. Как отмечено выше, система обычно работает с источником питания с частотой 50 Гц, но также возможны и другие частоты. В таблице также приведены мощность и скорость вращения в случае источника питания с частотой 60 Гц, но в дальнейшем за отправную точку будет принято значение 50 Гц. Как показано выше в табице, в режиме 0 система выключена, двигатели М 1, М 2 не вращаются и не вырабатывают никакой мощности. В режиме L первый двигатель М 1 вращается с низкой скоростью вращения (750 об/мин). При этом мощность машины Р составляет от 0 до 400 кВт в зависимости от уровня нагрузки устройства PC управления нагрузкой, выбранного с помощью ручки РР указанного устройства. В режиме М второй двигатель М 2 вращается со средней скоростью вращения (1000 об/мин). Мощность машины Р при этом составляет от 0 до 500 кВт в зависимости от уровня нагрузки устройстваPC. Если выбран режим Н, то первый двигатель М 1 вращается с высокой скоростью Н вращения (1500 об/мин). Мощность машины Р при высокой скорости Н вращения составляет от 0 до 1500 кВт в зависимости от уровня нагрузки устройства PC. В приведенном выше описании описаны только скорость вращения и мощность в различных выбранных режимах, но также важно описать переходы между различными режимами. Если оператор установил систему в режим 0, то на интерфейсе управляющей системы С включается лампа, показывающая,что система находится в выбранном режиме. Если затем оператор нажимает командную кнопку L, то система переходит из режима 0 в режим L. Этот переход от 0 к L может быть назван TR1. При этом первый двигатель М 1 ускоряется от скорости 0 до скорости L (750 об/мин), когда управляющий сигнал от управляющей системы С включает тиристор Т 1 на первом щите U1 управления и замыкатель S2. Вследствие свойств тиристора Т 1, которые известны специалистам в данной области техники, первый двигатель М 1 затем плавно ускоряется при ограниченном пусковом токе до тех пор, пока не достигнет требуемой скорости L вращения. Т.к. два двигателя М 1 и М 2 механически соединены с помощью вала, то первый двигатель М 1 также будет вращаться со скоростью L вместе со вторым двигателем М 2. В описанном выше переходе TR1 управляющая система С может уменьшить потребность в энергии ускорения путем понижения нагрузки устройства PC. Высокая энергия ускорения требует большого количества производимой и доступной энергии. Если в наличии нет достаточной доступной энергии, то необходимо уменьшить энергию ускорения. Это может быть выполнено двумя способами. При первом способе управляющая система С дает команду устройству PC на снижение нагрузки путем регулирования нагрузки устройства PC в сторону нуля. Такая регулировка выполняется системой С управления автоматически и временно имеет более высокий приоритет, чем регулировка с помощью изменения положения ручки РР устройства управления нагрузкой. Управляющая С система получает информацию о доступной энергии от системы RC дистанционного управления. Второй способ снижения требуемой энергии ускорения предусматривает использование муфты CL. Управляющая система С подает муфте CL команду на открытие, так что с машин М 1, М 2 снимаются все нагрузки. После достижения скорости L вращения управляющая система С может подать муфте CL команду на повторное соединение и увеличить уровень нагрузки устройства PC до требуемого значения. При использовании так называемого мягкого сцепления повторное соединение происходит более мягко, т.е. без мгновенного механического соединения. Выражение мягкое сцепление хорошо известно специалистам в данной области техники. После выполнения этих операций система находится в режиме L, двигатели М 1, М 2 имеют скорость вращения L = 750 об/мин, и мощность может плавно регулироваться с помощью устройства PC управления нагрузкой в пределах от 0 до 400 кВт. Если оператор активирует командную кнопку М, когда система уже находится в режиме L, то управляющая система С отключает тиристор Т 1 и замыкатель S2 и одновременно подключает тиристор Т 3 на втором щите U2 управления второго двигателя М 2. В начале этого режима перехода, называемогоTR2, оба двигателя М 1, М 2 имеют низкую скорость L вращения, например, 750 об/мин, как описано выше. При подключении тиристора Т 3 происходит ускорение второго двигателя М 2 до скорости М вращения, составляющей 1000 об/мин. Соответственно, это также приводит к вращению двигателя М 1 со скоростью М. Мощность системы затем может плавно регулироваться устройством PC в интервале от 0 до 500 кВт, обеспечиваемом двигателем М 2. Таким образом достигается плавный переход между скоростями L и М. Переход между скоростями М и Н вращения происходит несколько иным образом. Основой для этого перехода, называемого TR3, будет тот факт, что двигатели М 1, М 2 вращаются со скоростью М частотой и тиристор Т 3 включен, тогда как другие тиристоры Т 1, Т 2 и замыкатели S1, S2 отключены. Во время перехода TR3 второй двигатель действует в качестве так называемого пускового двигателя и является вспомогательным двигателем, который помогает первому двигателю М 1 достичь высокой скорости Н вращения. Когда оператор активирует командную кнопку Н в управляющей системе С, тиристор Т 3 отключается и одновременно включается тиристор Т 2. Второй двигатель М 2 ускоряется до скорости Н вращения. Управляющая система С следит за этим ускорением и после достижения двигателями М 1, М 2 скорости Н вращения отключает тиристор Т 1 и замыкатель S1 в первом щите U1 управления, присоединенном к первому двигателю М 1. Исходя из этого тиристор Т 2 затем отключается, и двигатель М 1 плавно синхронизируется с электросетью без какого-либо существенного пускового тока. После этого двигатели М 1, М 2 работают с постоянной высокой скоростью Н вращения, составляющей 1500 об/мин, при этом мощность системы может изменяться от 0 кВт до 1500 кВт с помощью устройства PC управления нагрузкой. Переходы из режима Н в М, из Н в L, из Н в O, из М в L, из М в O, из L в O, из О в М и из О в Н выполняют соответствующим способом, как описано выше, и поэтому в дальнейшем их подробное описание не приводится. Как изображено на фиг. 1, к системе подсоединена система RC дистанционного управления. Эта система RC дистанционного управления обменивается информацией с остальной системой и выдает информацию, например, об энергии, подаваемой от электросети в остальную систему и о величине мощности этой электросети. Такая система RC дистанционного управления препятствует отбору системой от электросети энергии, превышающей допустимую энергию, т.е. осуществляется управление нагрузкой или мощностью, которое предотвращает перегрузку в системе. Компоненты и функции, а также альтернативные конфигурации, подробно описанные для фиг. 1,также имеют силу для вариантов выполнения, изображенных на фиг. 2-8. Поэтому в дальнейшем описаны только существенные различия между вариантом выполнения, показанном на фиг. 1, и соответствующими другими вариантами выполнения. На фиг. 2 изображен второй вариант выполнения изобретения, полностью аналогичный варианту выполнения, показанному на фиг. 1, за исключением щита U2 управления и скоростей вращения двигателя М 2. Вариант выполнения, изображенный на фиг. 2, является упрощенным решением предпочтительного варианта выполнения, изображенного на фиг. 1, в отношении количества компонентов и цены. Компоненты в системе, изображенной на фиг. 2, такие же как компоненты, подробно описанные выше для фиг. 1, и соответственно их дополнительное описание для фиг. 2 не приводится. Щит U2 управления управляет, как и в случае фиг. 1, вторым двигателем М 2. Щит U2 управления содержит датчик CS и группу встречно включенных тиристоров Т 2 (в противоположность двум группам тиристоров на фиг. 1). Выбор только одной группы тиристоров Т 2 соответствует второму двигателю М 2, имеющему только одну скорость вращения. Панель С управления содержит командные кнопки О, L, М, Н, причем скорости Н вращения двигателя М 2 соответствует командная кнопка М. Двигатель М 2 только с одной скоростью вращения является более простым и дешевым по сравнению с соответствующим двигателем М 2 на фиг. 1. Режим и переходы между режимами примерно такие же, как описанные для фиг. 1. На фиг. 3 изображен третий вариант выполнения, в котором щит U2 управления и скорости вращения двигателей М 1, М 2 изменены по сравнению с фиг. 1. Щит U2 управления на фиг. 3 содержит датчикCS, измеряющий ток и напряжение, и вычисляет мощность. В дополнение к датчику CS, щит U2 управления содержит преобразователь FC частоты. Первый двигатель М 1 может работать со скоростями Н и М вращения, тогда как второй двигатель М 2 представляет собой односкоростной двигатель со скоростьюL вращения. С помощью преобразователя FC частоты выполняется плавная регулировка скорости вращения двигателя М 2 от 0 до скорости Н. Скорость вращения второго двигателя М 2 дистанционно управляется управляющей системой С. Использование преобразователя FC частоты обеспечивает возможность свободного регулирования скорости вращения вверх и вниз и установки двигателя М 2 в режим с сохранением требуемой скорости вращения. Преобразователь FC частоты также содействует ускорению первого двигателя М 1 до требуемой скорости вращения, когда он не нагружен и управляется его собственным управляющим щитом. Известная проблема, связанная с преобразователями частоты, заключается в том, что они создают много помех в электросети. В данном изобретении эта проблема решена путем использования первого щита U1 управления с тиристорами Т 1 и замыкателями S1, S2 в дополнение ко второму щиту U2 управления с преобразователем FC частоты. При этом мощность смещается от двигателя М 2 на двигатель М 1 с высокой или средней скоростью вращения. Преобразователь частоты является стандартным компонентом, и выбор его типа и марки не представляет сложной задачи для специалиста. На фиг. 4 изображен четвертый возможный вариант выполнения в соответствии с данным изобретением. Этот вариант выполнения полностью аналогичен варианту выполнения, изображенному на фиг. 1, за исключением двигателей М 1, М 2. Большой двигатель М 1 имеет высокую скорость Н вращения, тогда как малый двигатель М 2 имеет две скорости Н и L вращения. В данном случае второй двигатель М 2 также работает в качестве вспомогательного двигателя, помогая первому двигателю М 1 достичь высокой скорости Н вращения. Панель С управления содержит три командные кнопки О, L, Н для выбора режима, обусловленные скоростями вращения двигателей М 1, М 2. Переход между различными скоростями вращения происходит так же, как описано для фиг. 1. На фиг. 1-4 и 6 первый двигатель М 1 изображен механически присоединенным с помощью вала к зубчатой передаче G, при этом второй двигатель М 2 также механически присоединен с помощью вала к той же зубчатой передаче G. Альтернативная упрощенная конфигурация заключается в соединении второго двигателя М 2 с первым двигателем М 1 с помощью вала, а не с помощью зубчатой передачи G, так что первый двигатель М 1 содержит два вала. Такая возможная конфигурация изображена на фиг. 5. Двигатели М 1, М 2 на фиг. 5 являются односкоростными двигателями, т.е. двигатель М 1 имеет скорость Н вращения, а двигатель М 2 имеет скорость L вращения. Это также отражено в управляющей системе С, в которой имеется только три выбираемых режима О, L, Н. В этом решении имеется лишь механическое изменение по сравнению с другими вариантами выполнения, которое делает его механически более простым для зубчатой передачи G, но не вызывает каких-либо изменений в отношении управления. Вариант выполнения, изображенный на фиг. 5, также упрощен по сравнению с другими вариантами выполнения в том плане, что отсутствуют зубчатая передача G и муфта CL. Данная упрощенная конфигурация, показанная на фиг. 5, может использоваться в качестве альтернативной и упрощенной конфигурации всех вариантов выполнения, изображенных на фиг. 1-4 и 6. На фиг. 6 изображен пятый вариант выполнения данного изобретения. Как изображено на чертеже,этот вариант выполнения содержит четыре двигателя М 1, М 2, М 3, М 4 вместо двух двигателей, как в описанных ранее вариантах выполнения. Указанные четыре двигателя М 1, М 2, М 3, М 4 являются двухскоростными двигателями с одинаковыми характеристиками. В каждом двигателе может использоваться даже одна или три скорости вращения. На фиг. 6 изображены двигатели М 1, М 2, М 3, М 4 с двумя скоростями Н и L вращения, высокой и низкой, но также возможен выбор других скоростей. Щиты U1, U2, U3,U4 управления присоединены к двигателям М 1, М 2, М 3, М 4 и управляют ими. Все эти щиты U1, U2, U3,U4 имеют одинаковые конструкции и функции. Каждый из указанных четырех щитов U1, U2, U3, U4 содержит группу встречно включенных тиристоров Т 1, Т 2, Т 3, Т 4, датчик CS и два замыкателя S11 иS12, S21 и S22, S31 и S32, S41 и S42. Щиты U1, U2, U3, U4 управления должны иметь одинаковую конструкцию и функции, но вместо описанной конструкции они могут, например, содержать (не показано на чертеже) две группы встречно включенных тиристоров и два датчика. Управляющая система С управляет указанными щитами U1, U2, U3, U4. Плавное управление мощностью и скоростью вращения в варианте выполнения, изображенном на фиг. 6, осуществляется так же, как описано для предыдущих вариантов выполнения. Система на фиг. 6 содержит четыре двигателя, но может использоваться любое количество, от дух до десяти, одинаковых параллельных двигателей. В управляющей системе С, изображенной на фиг. 6, добавлен переключатель и индикатор D, который отсутствует в других вариантах выполнения. Переключатель/индикатор D содержит динамическую функцию, которая при активации пользователем соединяет от одного до четырех двигателей М 1, М 2, М 3, М 4, в зависимости от величины мощности, получаемой на машине Р. Вариант выполнения, изображенный на фиг. 6, главным образом используется в случае необходимости подведения к машине Р больших мощностей, распределенных между несколькими приводными двигателями. Не изображенный альтернативный вариант конфигурации, показанной на фиг. 6, заключается в добавлении пятого двигателя в дополнение к четырем двигателям М 1, М 2, М 3, М 4. Этот пятый дополнительный двигатель является малым двигателем с регулируемой частотой, как показано на фиг. 3. На фиг. 7 изображен шестой вариант выполнения изобретения, в котором система содержит только один двигатель М 1. Указанный двигатель М 1 представляет собой двухскоростной двигатель с двумя скоростями Н, L вращения, высокой и низкой. Также могут использоваться трех- и четырехскоростные двигатели. Соответственно, щит U1 управления также должен быть расширен. Как и в описанных ранее вариантах выполнения, двигатель М 1 управляется щитом U1. Щит U1 управления содержит два датчикаCS и две группы встречно включенных тиристоров Т 2, Т 3. В альтернативной конфигурации щита U1 управления (не показана) он может содержать датчик CS, группу встречно включенных тиристоров и два замыкателя. Щит U1 управляется управляющей системой С с такой же структурой и назначением, как описано выше. Так как двигатель М 1 имеет две скорости Н, L вращения, то в управляющей системе С есть только три командные кнопки, обеспечивающие выбор между режимами О, L и Н. В этих вариантах выполнения тиристоры Т 2, Т 3 одни полностью обеспечивают ускорение двигателя М 1 и отвечают за работу всей системы в противоположность другим вариантам выполнения, в которых используется пусковой двигатель. Данная система, изображенная на фиг. 7, создает более высокую нагрузку на электросеть и требует более мощной электросети, чем предыдущие альтернативные варианты. На фиг. 8 изображен седьмой вариант выполнения изобретения, который является модификацией варианта выполнения, изображенного на фиг. 3. Вместо преобразователя FC частоты, показанного на фиг. 3, в седьмом варианте выполнения система содержит неэлектрический двигатель/турбину НМ. Этот неэлектрический двигатель/турбина НМ обычно приводится в действие гидравлическим или пневматическим приводом, но также могут использоваться другие типы неэлектрических двигателей/турбин. Указанный неэлектрический двигатель/турбина НМ приводится в действие отдельным источником S питания. Так как двигатель/турбина НМ не является электрическим устройством, то он нуждается в датчикеSP скорости вращения, измеряющем его работу. Датчик SP скорости вращения обеспечивает электрический мониторинг неэлектрического двигателя/турбины НМ. Двигатель/турбина НМ управляется таким образом, что имеется возможность перехода от скорости O к L и от O к Н, кроме того, он может использоваться для запуска всей системы с пониженной производительностью. Возврат R представляет собой количество рабочей среды, которая возвращается из неэлектрического двигателя/турбины и может быть подведена для повторного использования к источнику S питания, например, с помощью насоса. Двигатель М 1 является двухскоростным двигателем или генератором со скоростями Н и L вращения и управляется щитом U1 управления, содержащим две группы встречно включенных тиристоров Т 2,Т 3, каждая из которых соединена с датчиком CS. Управляющая система С управляет щитом U1, двигателем М 1 и двигателем/турбиной НМ так же, как описано выше для других вариантов выполнения. В принципе, двигатель М 1 может иметь от одной до четырех скоростей. Компоненты, используемые в предложенной системе, являются доступными стандартными компонентами, и специалисту в данной области техники должно быть понятно, какой тип и марка различных компонентов являются предпочтительными. Исключение представляет связанное с управляющей системой С программное обеспечение, которое не является стандартным программным обеспечением. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Тяжелая вращающаяся технологическая машина (Р), такая как, например, турбина или пропеллер, с системой для управления скоростью вращения и мощностью, причем указанная машина (Р) соединена по меньшей мере с одним двигателем или генератором (М 1) с помощью вала и выполнена с возможностью вращения со скоростью вращения, задаваемой указанным двигателем или генератором (М 1),при этом двигатель или генератор (М 1) соединен с управляющей системой (С), регулирующей скорость его вращения,при этом указанный вал, соединяющий технологическую машину (Р) с указанным по меньшей мере одним двигателем или генератором (М 1), образует ось вращения технологической машины, и вращающаяся технологическая машина (Р) содержит устройство (PC) управления нагрузкой, выполненное с возможностью регулировки, причем управляющая система (С) соединена с указанной машиной (Р) и предназначена для контроля за устройством (PC) управления нагрузкой в машине (Р),отличающаяся тем, что управляющая система (С) присоединена к первому щиту (U1) управления и предназначена для управления им, причем первый щит (U1) управления соединен с двигателем или генератором (М 1) и предназначен для управления им, при этом указанный первый щит (U1) управления содержит по меньшей мере одну группу тиристоров (Т 1) для достижения с их помощью плавных переходов между несколькими выбираемыми скоростями вращения и снижения затрат энергии путем плавной регулировки мощности и скорости вращения двигателя или генератора (М 1) в соответствии с изменяющейся потребностью в мощности. 2. Технологическая машина по п.1, в которой первый щит (U1) управления дополнительно содержит по меньшей мере один датчик (CS), например датчик тока. 3. Технологическая машина по п.2, в которой первый щит (U1) управления дополнительно содержит по меньшей мере два замыкателя (S1, S2). 4. Технологическая машина по п.1, в которой щит (U1) управления содержит по меньшей мере две группы тиристоров (Т 2, Т 3) и по меньшей мере два датчика (CS). 5. Технологическая машина по п.1, в которой щит (U1) управления дополнительно содержит по меньшей мере один преобразователь (FC) частоты и по меньшей мере один датчик (CS). 6. Технологическая машина по п.1, содержащая дополнительно по меньшей мере один второй двигатель или генератор (М 2), который соединен, по меньшей мере, с первым двигателем или генератором(М 1) с помощью вала, причем второй двигатель или генератор (М 2) выполнен с возможностью содействия первому двигателю или генератору (М 1) в достижении высоких скоростей вращения. 7. Технологическая машина по п.6, в которой первый двигатель или генератор (М 1) и второй двигатель или генератор (М 2) соединены соответственно с первым и вторым щитами (U1, U2) управления и выполнены с возможностью управления ими. 8. Технологическая машина по п.7, в которой первый двигатель или генератор (М 1) имеет по меньшей мере одну первую скорость (Н) вращения, а второй двигатель или генератор (М 2) имеет по меньшей мере одну вторую скорость (L) вращения. 9. Технологическая машина по п.6, в которой первый двигатель или генератор (М 1) имеет мощность в диапазоне между значением, превышающим мощность второго двигателя или генератора (М 2) в три раза, и значением, превышающим мощность второго двигателя или генератора (М 2) в десять раз. 10. Технологическая машина по п.1, в которой тиристоры (Т 1, Т 2, Т 3) представляют собой трехфазные встречно включенные тиристоры или эквивалентные по мощности полупроводники. 11. Технологическая машина по п.1, которая предназначена для присоединения к внешнему источнику питания с частотой 50 Гц. 12. Технологическая машина по п.1, мощность которой превышает 100 кВт. 13. Технологическая машина по п.1, в которой управляющая система (С) дополнительно соединена по меньшей мере с одной муфтой (CL) и предназначена для управления ею. 14. Технологическая машина по п.1, которая соединена с зубчатой передачей (G), которая соединена с двигателем или генератором (М 1). 15. Технологическая машина по п.6, которая соединена с зубчатой передачей (G), которая соединена с первым двигателем или генератором (М 1) и со вторым двигателем или генератором (М 2). 16. Технологическая машина по п.1, к которой дополнительно присоединена система (RC) дистанционного управления. 17. Технологическая машина по п.1, в которой указанный по меньшей мере один двигатель или генератор (М 1) присоединен к неэлектрическому двигателю (НМ) с помощью вала, причем указанный неэлектрический двигатель (НМ) управляется с помощью управляющей системы (С). 18. Технологическая машина по п.17, в которой неэлектрический двигатель (НМ) приводится в действие источником (S) питания. 19. Технологическая машина по п.17, в которой неэлектрический двигатель (НМ) соединен с датчиком (SP) скорости вращения.
МПК / Метки
МПК: H02P 27/02, H02P 5/747
Метки: технологическая, тяжелая, вращающаяся, машина
Код ссылки
<a href="https://eas.patents.su/13-23464-tyazhelaya-vrashhayushhayasya-tehnologicheskaya-mashina.html" rel="bookmark" title="База патентов Евразийского Союза">Тяжелая вращающаяся технологическая машина</a>
Вращающаяся электрическая машина
Номер патента: 2196
Опубликовано: 28.02.2002
Авторы: Лейён Матс, Сёренсен Эрланд
МПК: H02K 19/26
Метки: электрическая, вращающаяся, машина
Формула / Реферат:
1. Вращающаяся электрическая машина переменного тока, предназначенная для непосредственного подключения к распределительной или магистральной сети, содержащая систему бесщеточного возбуждения и, по меньшей мере, одну электрическую обмотку, отличающаяся тем, что обмотка выполнена из кабеля, имеющего, по меньшей мере, одну токопроводящую жилу, изоляция которого содержит внутренний слой, обладающий полупроводниковыми свойствами, промежуточный...
Вращающаяся электрическая машина с радиальным охлаждением
Номер патента: 1129
Опубликовано: 30.10.2000
Авторы: Иварсон Клаэс, Лейён Матс, Кюландер Гуннар
МПК: H02K 1/20
Метки: машина, вращающаяся, электрическая, радиальным, охлаждением
Формула / Реферат:
1. Вращающаяся электрическая машина, содержащая статор (1) с обмоткой из высоковольтного кабеля, имеющий зубцы (4) статора, идущие радиально внутрь от внешней части (5) ярма, при этом указанная машина содержит обмотку, включающую систему изоляции, содержащую, по меньшей мере, два полупроводящих слоя, каждый из которых образует по существу эквипотенциальную поверхность, и твердую изоляцию, расположенную между ними, причем, по меньшей мере, один...
Установка, содержашая вращающуюся электрическую машину, вращающаяся высоковольтная машина и способ изготовления цепи для вращающейся высоковольтной машины
Номер патента: 1488
Опубликовано: 23.04.2001
Авторы: Леийон Матс, Ертмар Ларс
МПК: H02J 3/36
Метки: машины, высоковольтная, вращающуюся, содержашая, изготовления, цепи, машина, способ, вращающейся, установка, электрическую, машину, вращающаяся, высоковольтной
Формула / Реферат:
1. Установка для диапазона мощностей от 1 МВт до 15 ГВт, содержащая вращающуюся высоковольтную машину с одиночной обмоткой или многообмоточную машину и преобразователь, отличающаяся тем, что машина является машиной высокого напряжения и включает магнитную цепь с одним или более магнитными сердечниками и одной или более обмотками, которые смещены по фазе в пространстве, при этом обмотки содержат один или более токонесущих проводников (2), вокруг...
Вращающаяся мотыга, в частности ротационный культиватор для рыхления поверхностного слоя почвы
Номер патента: 18641
Опубликовано: 30.09.2013
Автор: Хорват Бенедек
МПК: A01B 21/02, A01B 21/00, A01B 35/16...
Метки: вращающаяся, культиватор, рыхления, мотыга, ротационный, почвы, слоя, частности, поверхностного
Формула / Реферат:
1. Вращающаяся мотыга (1), такая как ротационный культиватор для рыхления поверхностного слоя почвы, содержащая несущую конструкцию (2), выполненную с возможностью подвешивания на машине с моторным приводом, и по меньшей мере одну рабочую часть (4), которая шарнирно закреплена на несущей конструкции (2) и оснащена по меньшей мере одним рыхлительным колесом (12), выполненным с возможностью вращения при взаимодействии с почвой, причем рыхлительное...
Способ получения кормовых добавок из органических отходов и технологическая линия для его осуществления
Номер патента: 2848
Опубликовано: 31.10.2002
Автор: Галкин Василий Тимофеевич
МПК: A23N 17/00, A23K 1/00
Метки: технологическая, получения, отходов, способ, кормовых, добавок, органических, линия, осуществления
Формула / Реферат:
1. Способ получения кормовых добавок из органических отходов, предусматривающий измельчение исходного сырья до пылеобразного состояния, создание потока частиц сырья, сушку встречным потоком теплоносителя в течение 2-3 с при температуре 900-1300шС с последующим ее снижением до 100-150шС, сепарацию и удаление крупных и тяжелых частиц отходов, сепарацию и удаление мелкодисперсных частиц отходов с диаметром менее 0,1 мм, сепарацию и удаление...
Предыдущий патент: Производные бетулиновой кислоты с противовирусной активностью
Случайный патент: Устройство для доставки жидкости и способ работы впрыскивающего устройства