Способ определения ориентации датчика для электромагнитной разведки
Номер патента: 18145
Опубликовано: 30.05.2013
Авторы: Томсен Леон А., Стоер Чарльз, Аллегар Норман С, Мартинес Ярдения
Формула / Реферат
1. Способ определения ориентации датчика для электромагнитной разведки, расположенного в выбранном месте, заключающийся в том, что:
(i) наводят электромагнитное поле в выбранном месте выше части подповерхности Земли, которую необходимо разведать;
(ii) регистрируют часть электромагнитного поля вдоль по меньшей мере двух, по существу, ортогональных направлений в месте расположения датчика, причем указанная часть поля распространяется, по существу, только в вертикальной плоскости, содержащей место наведения поля и место регистрации поля;
(iii) определяют направление поляризации указанной части электромагнитного поля на основе зарегистрированной части и
(iv) определяют ориентацию датчика на основе определенного направления поляризации.
2. Способ по п.1, в соответствии с которым электромагнитное поле представляет собой неустановившееся электромагнитное поле, а шаг (ii) включает регистрацию амплитуды электрического поля и/или регистрацию амплитуды магнитного поля.
3. Способ по п.1, в соответствии с которым электромагнитное поле представляет собой неустановившееся электромагнитное поле, а шаг (ii) включает выбор части сигналов, которые зарегистрированы датчиком и которые получены в течение выбранного времени после наведения неустановившегося электромагнитного поля.
4. Способ по п.3, в соответствии с которым регистрация части поля, распространяющейся в вертикальной плоскости, на шаге (ii) основана на диаграмме смещения частиц, соответствующей зарегистрированным сигналам и являющейся, по существу, прямолинейной.
5. Способ по п.4, в соответствии с которым прямолинейная часть диаграммы смещения частиц максимизирована посредством выбора по меньшей мере одного расстояния источник-приемник.
6. Способ по п.5, в соответствии с которым указанное по меньшей мере одно расстояние источник-приемник представляет собой наименьшее расстояние, при котором датчик достоверно регистрирует получаемую энергию без электронного насыщения и нелинейных эффектов.
7. Способ по п.1, в соответствии с которым электромагнитное поле является, по существу, устойчивым, а шаг (ii) включает регистрацию амплитуды электрического поля и/или регистрацию амплитуды магнитного поля.
8. Способ по п.1, в соответствии с которым электромагнитное поле является, по существу, устойчивым, а шаг (ii) включает выбор части зарегистрированного электромагнитного поля, имеющей наибольшую энергию.
9. Способ по п.8, в соответствии с которым регистрация указанной части электромагнитного поля в вертикальной плоскости на шаге (ii) основана на диаграмме смещения частиц, соответствующей зарегистрированным сигналам и являющейся, по существу, прямолинейной.
10. Способ по п.1, в соответствии с которым шаг (ii) включает измерение электрического поля, наводимого электромагнитным полем, и измерение магнитного поля, наводимого электромагнитным полем, а шаг (iii) включает определение направления поляризации с использованием измеренных электрического и магнитного полей.
Текст
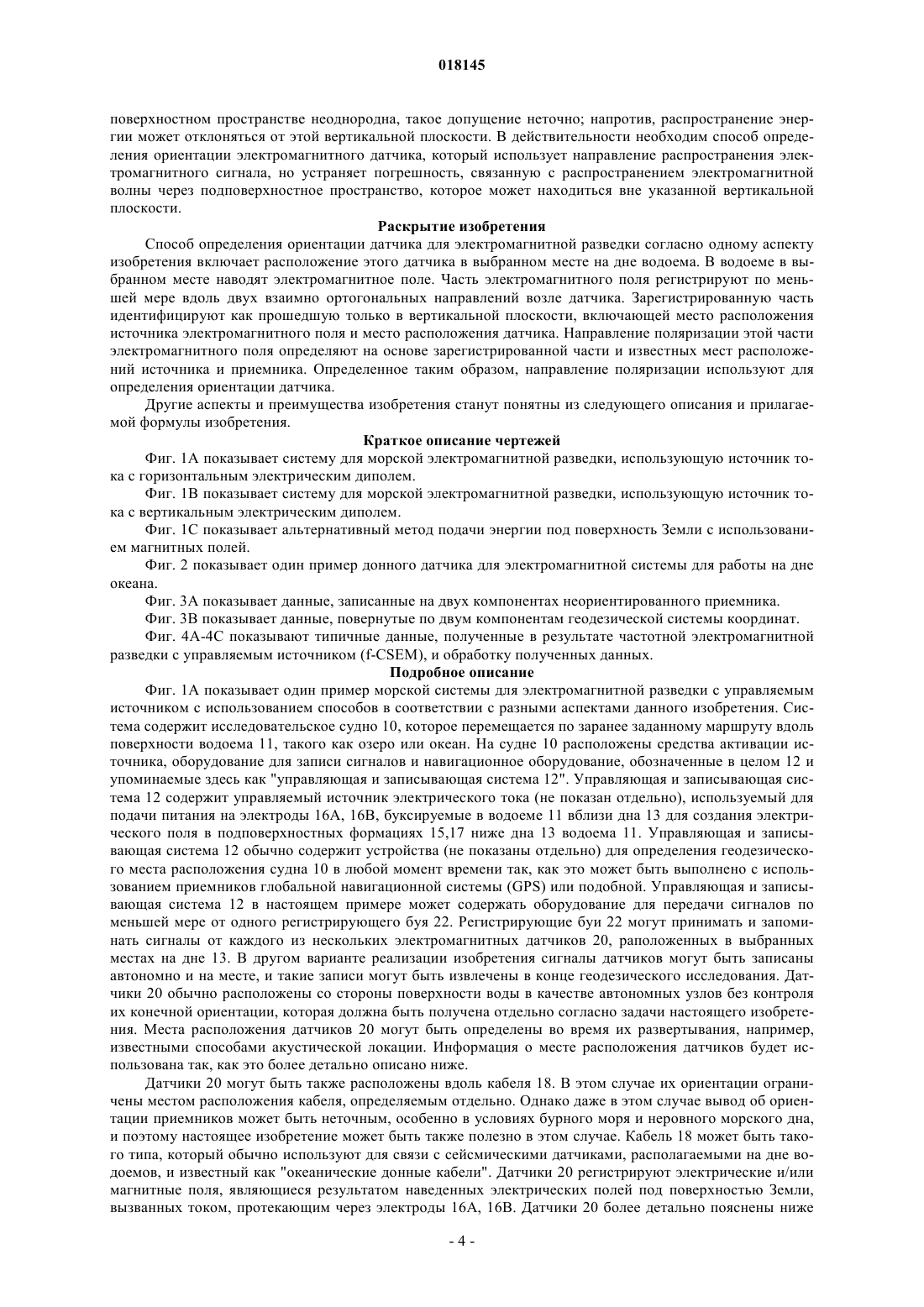
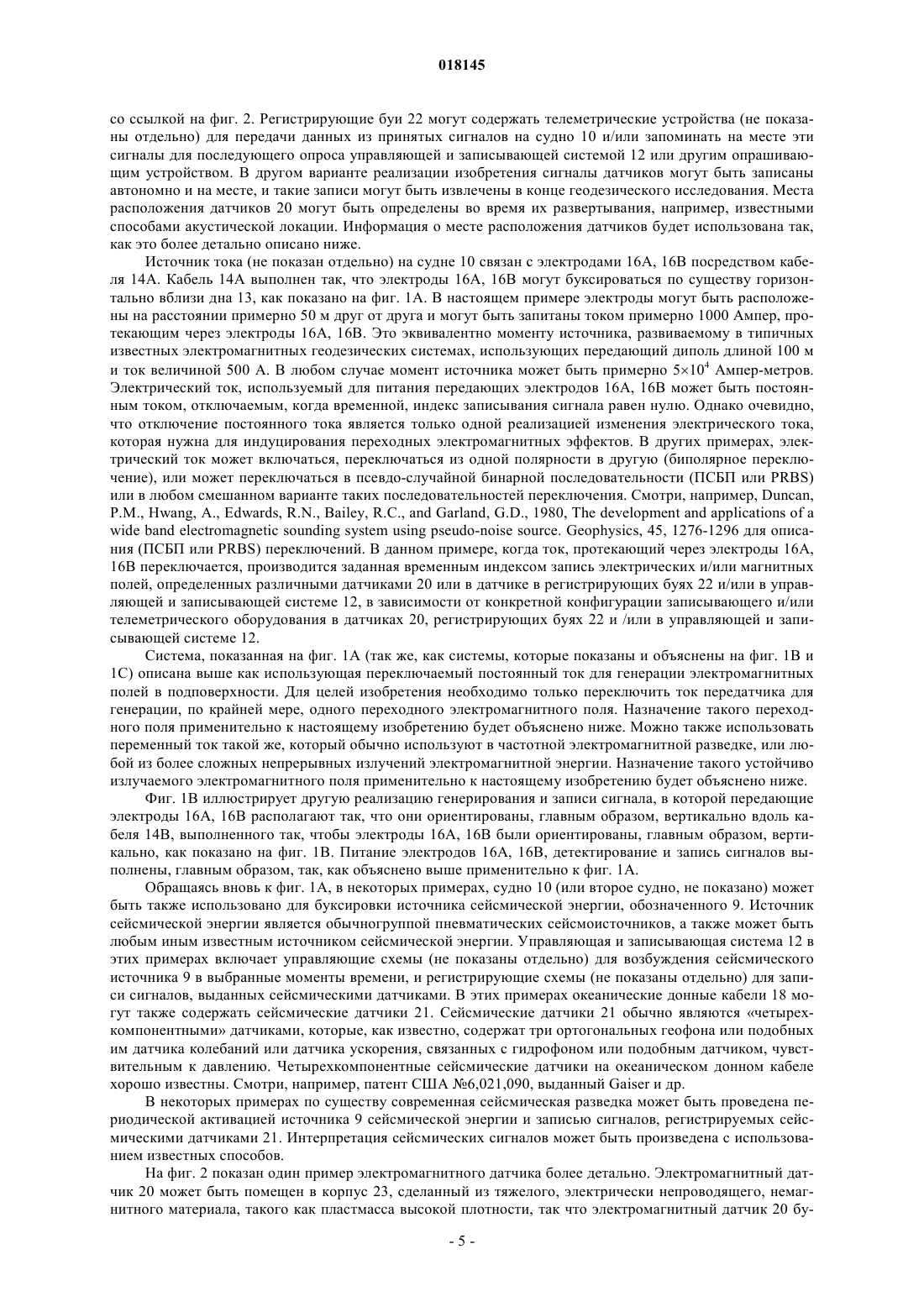
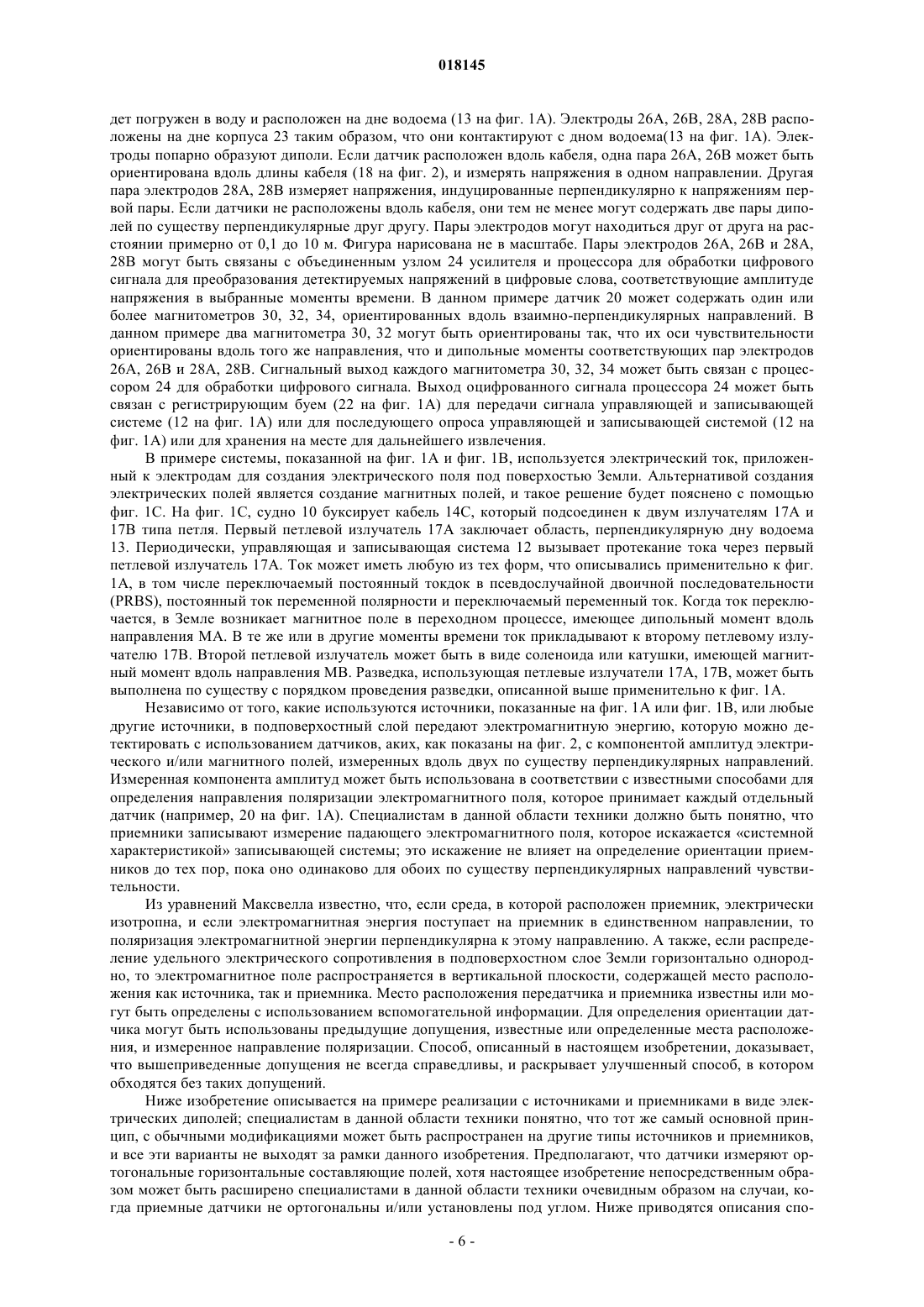
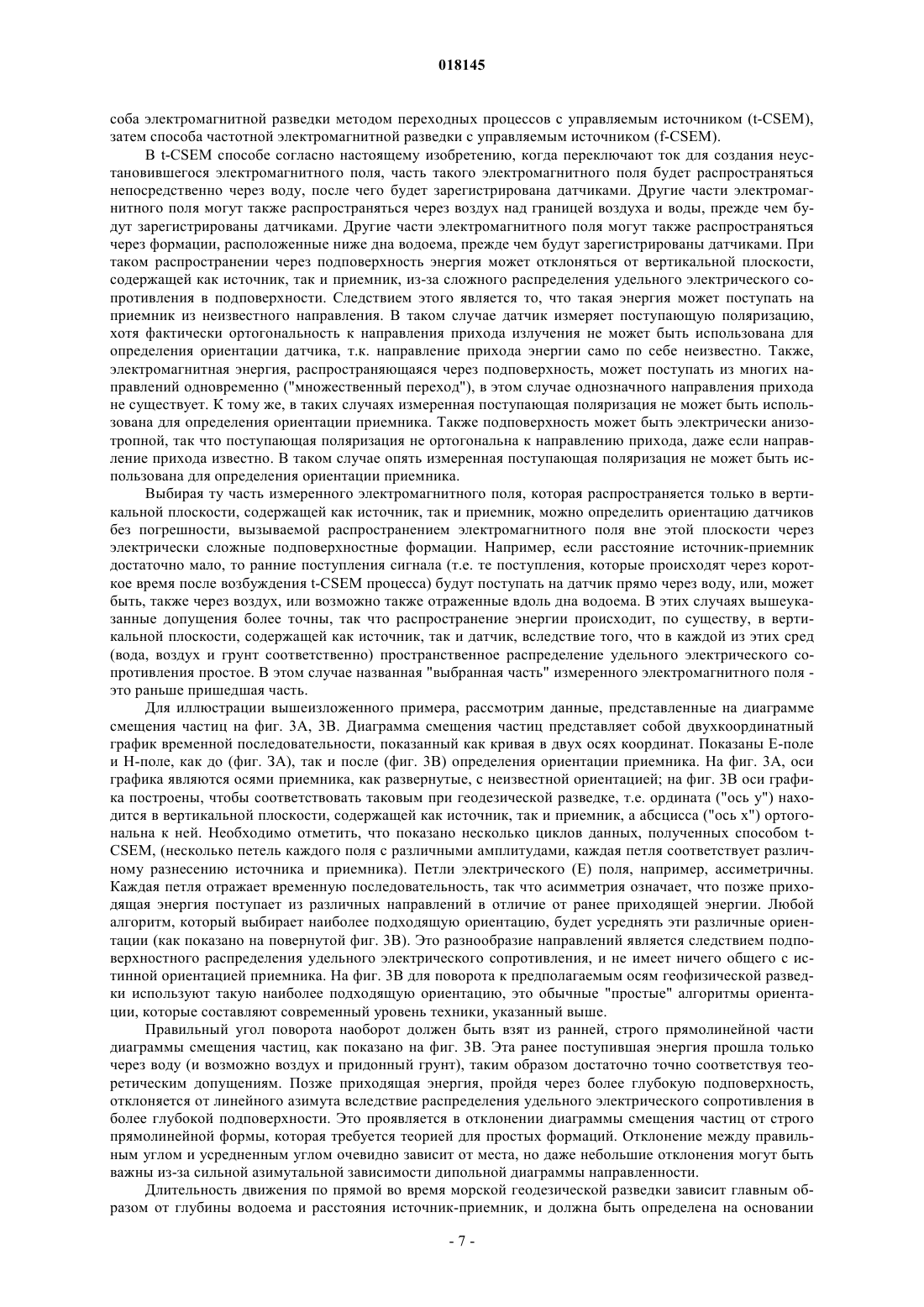
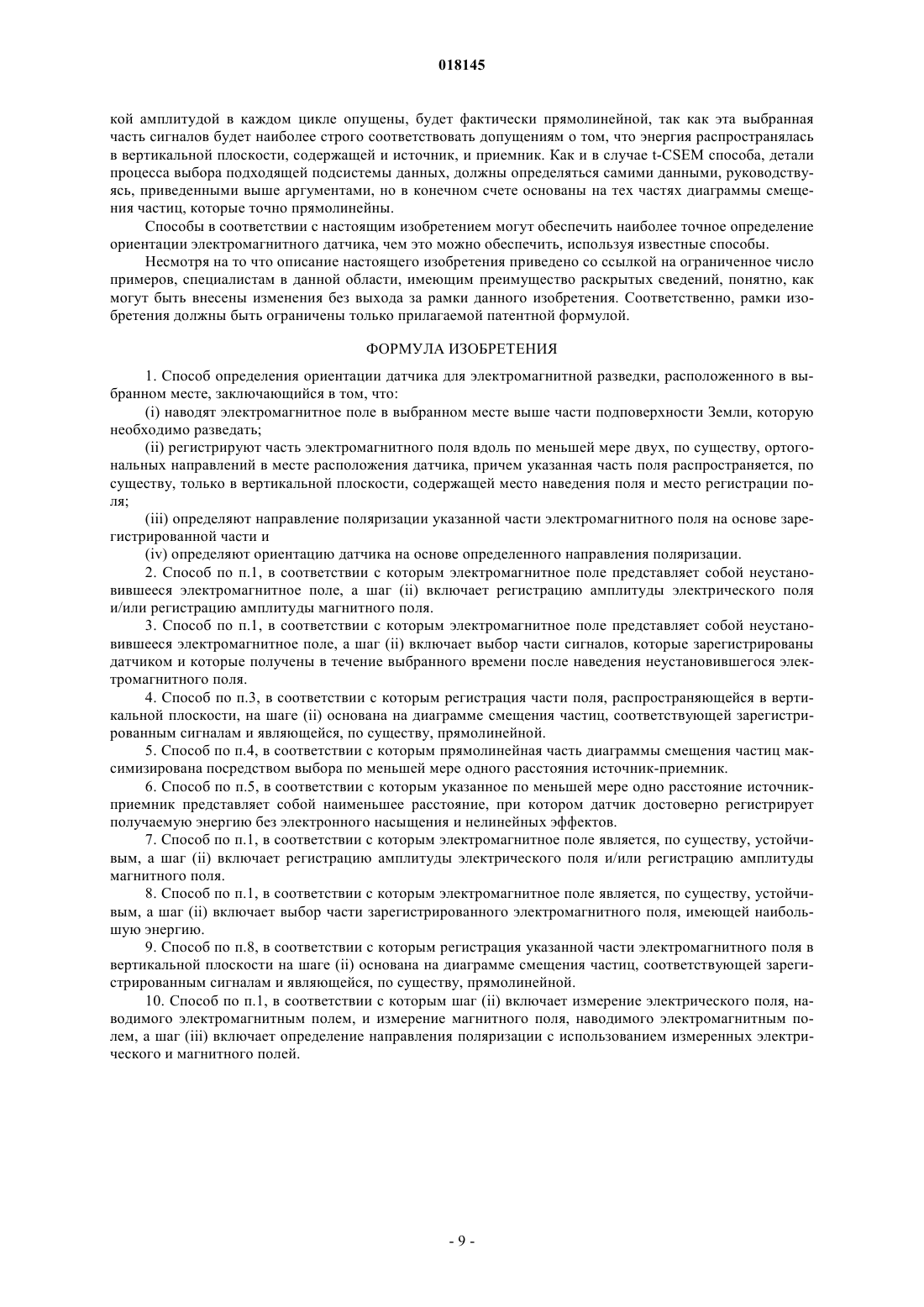
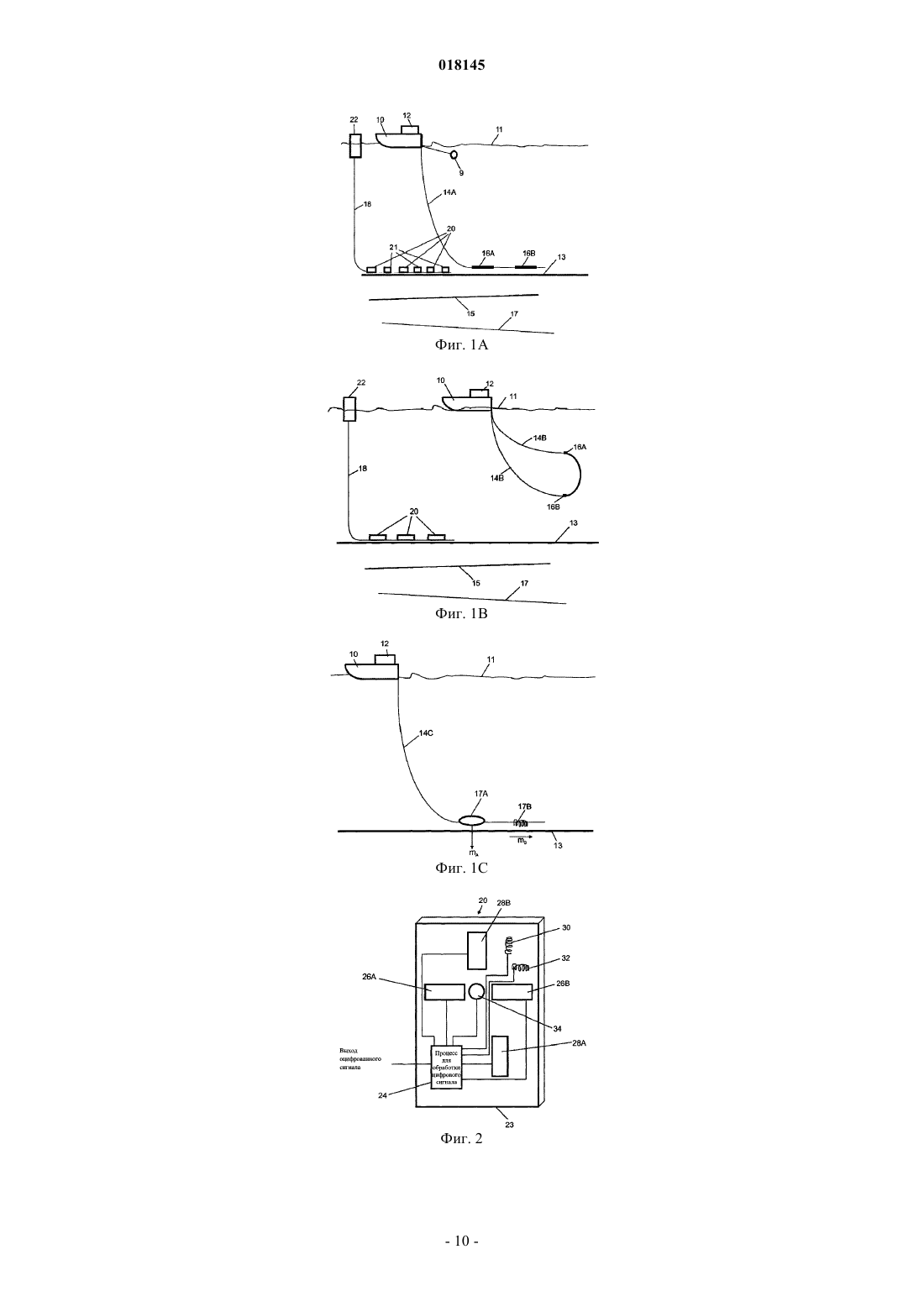
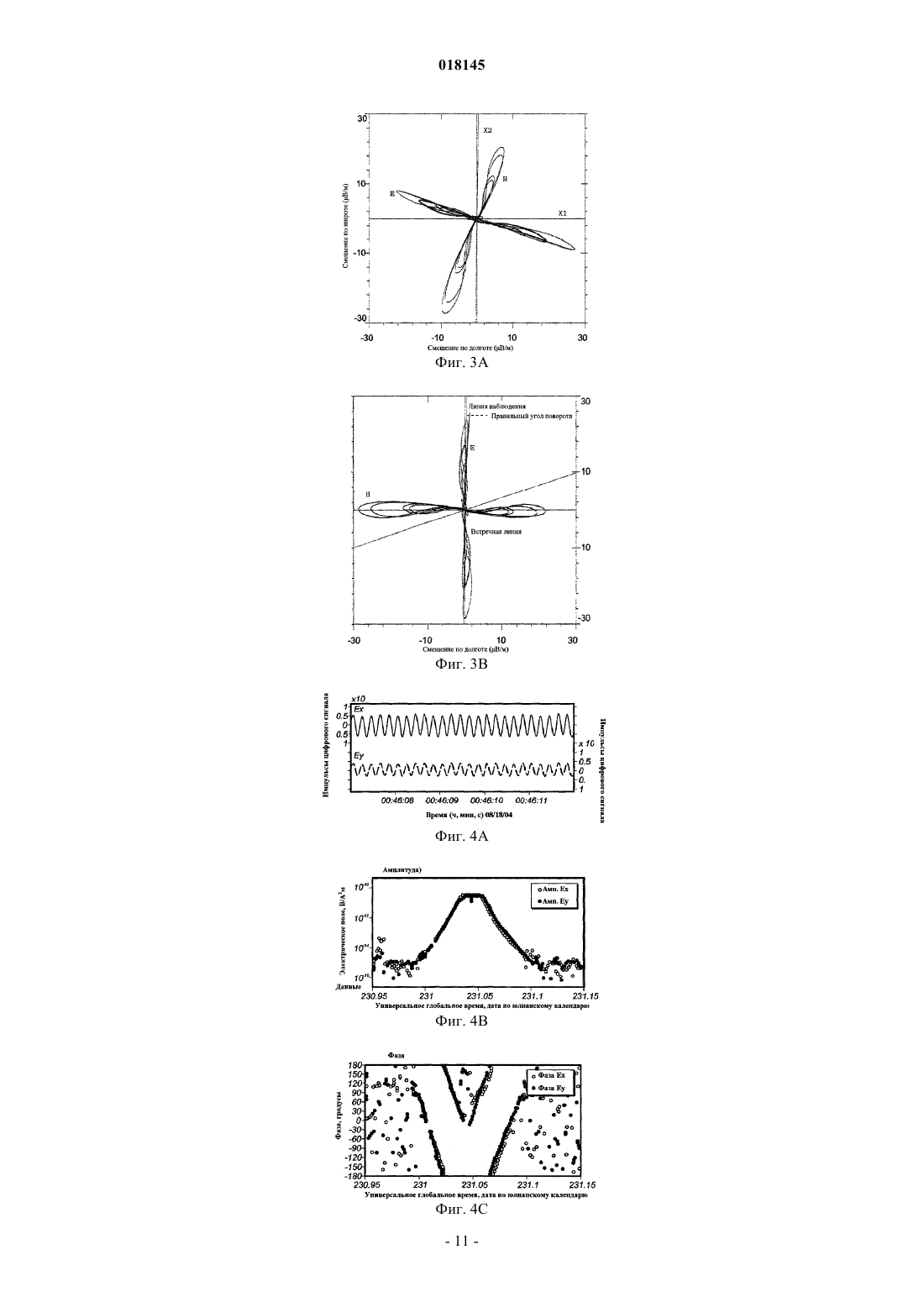
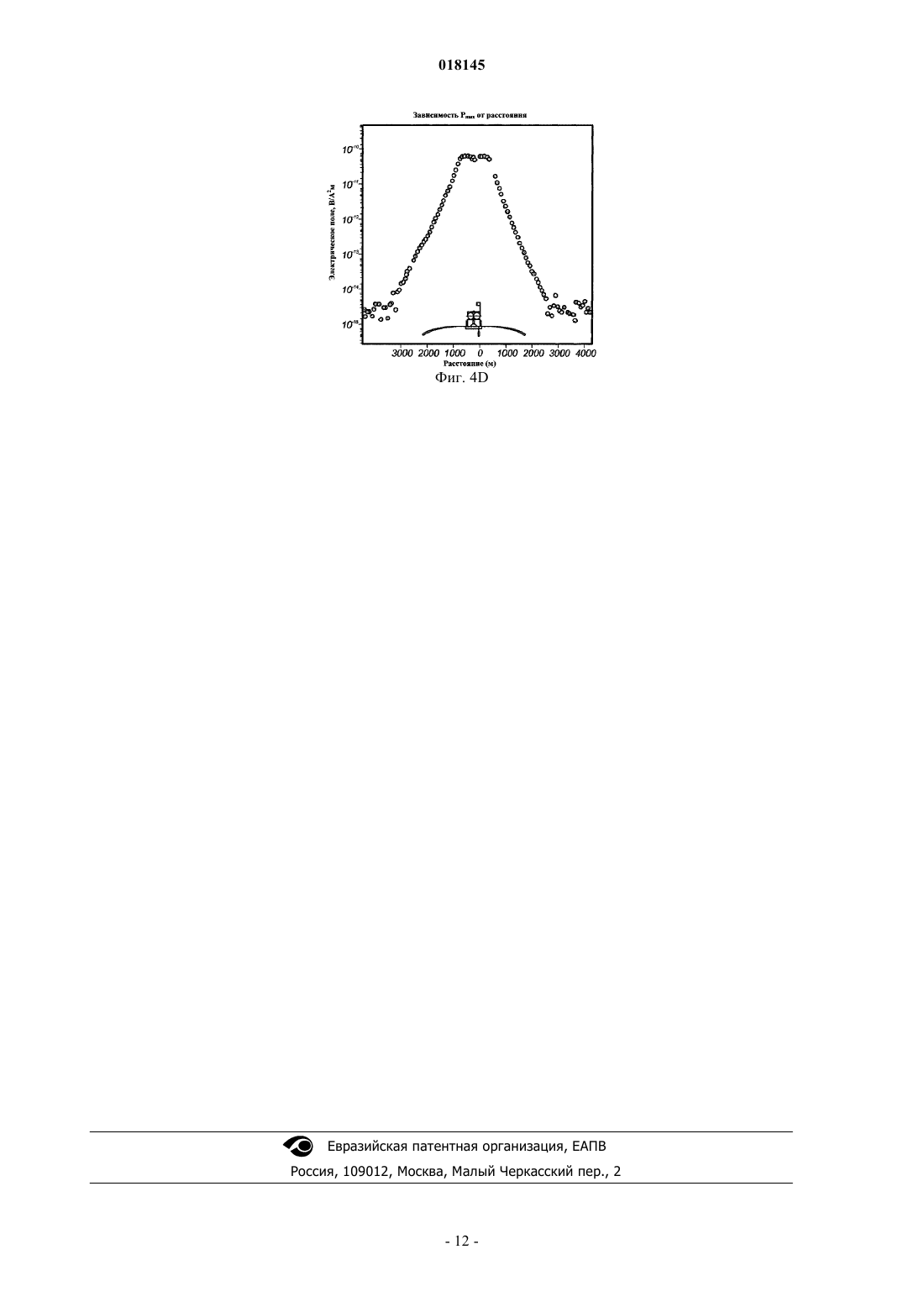
СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ДАТЧИКА ДЛЯ ЭЛЕКТРОМАГНИТНОЙ РАЗВЕДКИ Способ определения ориентации датчика для электромагнитной разведки включает расположение этого датчика в выбранном месте на дне водоема. В водоеме в выбранном месте наводят электромагнитное поле. Часть электромагнитного поля регистрируют, по меньшей мере, вдоль двух взаимно ортогональных направлений датчика. Зарегистрированную часть электромагнитного поля выбирают как прошедшую только в вертикальной плоскости, содержащей место расположения источника и место расположения датчика. Направление поляризации этой части электромагнитного поля определяют на основе выбранной части. Определенное направление поляризации используют для определения ориентации датчика. Область техники Изобретение относится в общем к области электромагнитной геофизической разведки. В частности,это изобретение относится к способам точного определения ориентации электромагнитных датчиков,расположенных для выполнения такой разведки. Уровень техники Способы и системы для электромагнитной разведки позволяют получить разнообразные данные о подповерхностных формациях, включая, например, пространственное распределение удельного электрического сопротивления под поверхностью Земли. Такие данные истолковываются и оцениваются, помимо прочего, для улучшения прогноза добычи нефти и газа из данного пласта или данной области, для обнаружения новых нефтегазовых пластов, для получения картины или модели подповерхностных формаций и пластов для обеспечения добычи углеводородов и/или уменьшения риска или иным образом улучшения процесса определения местоположения скважины. Электромагнитная разведка с управляемым источником (controlled source electromagnetic ("CSEM")surveying) включает подачу электрического тока или магнитного поля в подповерхностные формации Земли (через морское дно при морской разведке или через внутрискваженную жидкость при скважинной разведке) и измерение напряжений и/или магнитных полей, наводимых в электродах, антеннах и/или магнитометрах, расположенных вблизи поверхности Земли, на морском дне или в буровой скважине. Напряжения и/или магнитные поля наводятся в ответ на электрический ток и/или магнитное поле, поданный и/или поданное под поверхность Земли, а записанный сигнал истолковывается в показателях распределений удельного электрического сопротивления, индуцированной поляризации и т.п. в Земле. Как известно, разведка с управляемым источником обычно включает непрерывную подачу переменного электрического тока под поверхность. Переменный ток может иметь по меньшей мере одну выбранную частоту. Такая разведка известна под названием частотная электромагнитная разведка с управляемым источником (frequency domain controlled source electromagnetic (f-CSEM) surveying). Способы частотной электромагнитной разведки с управляемым источником описаны, например, в источникеelectromagnetic sounding system for marine use, Marine Geophysical Research, 12, 29-68. Другие публикации, описывающие физику и интерпретацию электромагнитной подповерхностной разведки включают: Edwards, R.N., Law, L.K., Wolfgram, P.A., Nobes, D.C., Bone, M.N., Trigg, D.F., and DeLaurier,J.M., 1985, OHFirst results of the MOSES experiment: Sea sediment conductivity and thickness determination,Bute Inlet British Columbia, by magnetometric offshore electrical sounding: Geophysics 50, No. 1, 153-160;Geophysics, 52, No. 2, 204-217. Typical borehole-related applications are described in Strack (US Patents No. 6,541,975 B2, 4H6,670,813, and 6,739,165) and Hanstein et al., (U.S. Patent No. 6,891,376). Предлагаемая методика не ограничивается этими публикациями, т.к. она имеет более общий характер, чем эти частные случаи. Еще одним известным способом электромагнитной разведки в подповерхностных формациях Земли является электромагнитная разведка методом переходных процессов с управляемым источником (transient controlled source electromagnetic (t-CSEM) surveying). При электромагнитной разведке методом переходных процессов с управляемым источником электрический ток подают в Землю с ее поверхности так же, как при частотной электромагнитной разведке с управляемым источником, но переходным образом. Начальный электрический ток может быть постоянным током. В выбранное время электрический ток отключают и на поверхности Земли измеряют наведенные напряжения и/или магнитные поля, обычно в определенный момент времени через выбранный временной интервал. Указанное отключение представляет собой переходное событие, дающее способу свое название; в отличие от некоторых реализаций частотной электромагнитной разведки с управляемым источником (которые также предусматривают отключение) при электромагнитной разведке методом переходных процессов с управляемым источником перед началом следующего переходного процесса проходит продолжительный временной интервал, причем он достаточно продолжительный для затухания наведенных полей, так что регистрация происходит,когда источник не активен. Вывод об электрической структуре подповерхностного пространства делают на основе временного распределения наведенных напряжений и/или магнитных полей. Способы электромагнитной разведки методом переходных процессов с управляемым источником описаны, например,в источнике "Strack, K.-M., 1992, Exploration with deep transient electromagnetics, Elsevier, 373 pp. (reprinted 1999)". Ниже описаны несколько патентных публикаций, в которых излагаются различные аспекты электромагнитной разведки под поверхностью Земли. Патент США 6603313 В 1, выданный Srnka, раскрывает способ, осуществляемый с поверхности для оценки свойств пласта, в котором сначала определяют положение пласта и средние величины удельных сопротивлений земли, сверху, снизу и горизонтально прилегающих к подповерхностным геологическим формациям, используя геологические и геофизические данные вблизи указанной подповерхностной геологической формации. Затем определяют размеры и частоту, на которой проводят разведку, для электромагнитного источника, чтобы по существу максимизировать подаваемые вертикальные и горизонтальные токи в подповерхностных геологических формациях, используя положение пласта и средние значения удельных электрических сопротивлений земли. После этого активируют электромагнитный источник на поверхности или вблизи нее, приблизительно в центре над подповерхностной геологической формацией и группой приемников измеряют компоненты электромагнитной реакции. Используя геологические и геофизические данные, определяют геометрические и электрические ограничения параметров. В заключение, указанную электромагнитную реакцию обрабатывают с использованием полученных геометрических и электрических ограничений параметров для получения инвертированных глубинных изображений вертикального и горизонтального удельного сопротивления. При необходимости инвертированные глубинные изображения удельного электрического сопротивления могут быть скомбинированы с геологическими и физическими данными для оценки жидкости в пласте и глинистностных свойств в нем. Этот способ использует простую технику для определения ориентации приемников, усовершенствованную настоящим изобретением. Патент США 6628110 В 1, выданный Eidesmo и др., раскрывает способ определения природы подземного пласта, приблизительные геометрия и расположение которого известны. Раскрытый способ включает приложение переменного электромагнитного поля к слоям, содержащим этот пласт; регистрацию ответного электромагнитного волнового поля и анализ влияний на характеристики зарегистрированного поля, вызванных этим пластом, в результате чего на основании этого анализа определяют содержимое пласта. Этот способ использует простую технику для определения ориентации приемников,усовершенствованную настоящим изобретением. Патент США 6541975 В 2 и патент США 6670813, выданный Strack, раскрывает систему для генерирования изображения земной формации, окружающей буровую скважину, проходящую через эту формацию. Удельное электрическое сопротивление формации измеряют с использованием измерений на постоянном токе, а удельную электропроводность и удельное электрическое сопротивление этой формации измеряют с помощью временных измерений сигнала или измерений на переменном токе. Также измеряют скорость звука в этой формации. Измерение удельного электрического сопротивления на постоянном токе, измерение электропроводности с помощью электромагнитного сигнала во временной области, измерение удельного электрического сопротивления с помощью электромагнитного сигнала во временной области и измерений скорости звука комбинируют для создания изображения указанной земной формации. В этом способе ориентацию приемников определяют с использованием обычных способов в отношении буровой скважины, а настоящее изобретение не применимо к данному случаю. Патент США 6739165, выданный Strack, раскрывает способ, где измерения переходных процессов электромагнитного поля выполняются с расположением приемника или передатчика в буровой скважине, а другого элемента на поверхности. Любой из них перемещается между моментами инициирования нестационарного источника (и последовательной передачей электромагнитной энергии землей) к новому месту расположения, где эксперимент повторяют. После обработки данных получают изображения изменений насыщенности в пласте. Этот способ использует простую технику для определения ориентации поверхностных приемников, усовершенствованную настоящим изобретением. В международной публикации патентной заявки WO 0157555 А 1 раскрыта система для обнаружения подземного пласта или определения природы подземного пласта, расположение и геометрия которого известны из предыдущих сейсмических исследований. Электромагнитное поле прикладывают с помощью передатчика на морском дне и регистрируют с помощью антенны, также расположенной на дне. Для определения природы любого присутствующего пласта находят составляющую отраженной волны в ответном волновом поле. Этот способ использует простую технику для определения ориентации приемников, усовершенствованную настоящим изобретением. В международной публикации патентной заявки WO 03048812 А 1 раскрыт способ электромагнитной разведки для разведки области, предварительно идентифицированной как потенциально содержащей подводный углеводородный пласт. Способ включает получение первого и второго наборов данных исследования с помощью электромагнитного источника, выставленного в продольном и поперечном направлениях относительно мест расположения одних и тех же или разных приемников. Изобретение также относится к планированию разведки с использованием данного способа и к анализу данных исследования, рассматриваемых в совокупности, которая обеспечивает гальваническую добавку к сигналам принятым приемником, для сравнения с индуктивными эффектами и анализа влияний ослабления сигнала,которое очень зависит от локальных свойств скальной формации, воды, залегающей сверху и воздуха в исследуемой области. Это очень важно для успешного применения электромагнитной разведки с целью идентификации углеводородных залежей и выделения их из других классов подповерхностной структуры. В этом способе используется простая техника для определения ориентации приемников, улучшенная настоящим изобретением. Заявка на патент США 2004232917, зарегистрированная на имя Wright и др., относится к способу картографирования контрастов подповерхностного удельного электрического сопротивления, с использованием многоканальных электромагнитных измерений методом переходных процессов на поверхности Земли или вблизи нее, используя по крайней мере один источник, средства для измерения отклика системы, и, по крайней мере, один приемник для измерения результирующего отклика земли. Все сигналы или от каждой пары источник-приемник обрабатываются для восстановления соответствующего электромагнитного импульсного отклика земли, и такие импульсные отклики или любое преобразование таких импульсных откликов, визуализируется для получения представления о контрастах подповерхностного удельного электрического сопротивления. Система и способ позволяют локализовать и идентифицировать залегания подповерхностных жидкостей и проводить мониторинг движения таких жидкостей. Этот способ использует простую технику определения ориентации приемников, улучшенную настоящим изобретением. В патенте США 5467018, выданном Rueter и др., раскрыта система разведки коренных пород. Эта система содержит переходные процессы, генерируемые как скачкообразные изменения в передаваемой последовательности, которая передается от передатчика в подповерхностный слой Земли. Вырабатываемые вследствие этого индуцированные электрические токи измеряются несколькими приемными блоками. Измеренные значения, полученные от приемных блоков поступают в центральный блок. Измеренные значении, полученные от приемников, преобразуются в цифровой вид и хранятся в контрольноизмерительных точках, а центральный блок связан с контрольно-измерительными точками телеметрической связью. Посредством телеметрической связи данные из ячеек хранения данных в приемных блоках могут быть переданы в центральный блок. Этот способ использует простую технику определения ориентации приемников, улучшенную, применительно к морским изысканиям, настоящим изобретением. В патенте США 5563913, выданном Tasci и др., раскрыт способ и устройство, используемые для предоставления данных измерения удельного электрического сопротивления подповерхностного слоя с осадочными отложениями. Эти данные используются для определения и картографирования структуры с аномальным удельны электрически сопротивлением. Структура с аномальным подповерхностным удельным электрическим сопротивлением связана и помогает нахождению полостей с нефтью и/или газом на различных глубинах относительно фундамента подповерхностного слоя с осадочными отложениями. Устройство располагается на поверхности земли и содержит электрический генератор, соединенный с передатчиком длинным кабелем с заземленными электродами. Когда через передатчик и кабель посылают прямоугольный импульс тока большой амплитуды и с большим периодом, в подповерхностном слое индуцируются вторичные вихревые токи. Вихревые токи вызывают изменения магнитного поля в подповерхностном слое, которые могут быть измерены на поверхности земли с помощью магнитометра или индукционной катушки. Изменения магнитного поля принимаются и записываются как напряжения, переменные во времени в каждой точке зондирования. Информация приемника и изменения удельного электрического сопротивления формаций в подповерхностном слое выводятся из амплитуды и формы нанесенных на график сигналов измеренного магнитного поля в виде функции времени в результате применения соответствующих математических уравнений. Точки зондирования расставлены в виде схемы для обеспечения возможности получения соотнесенных с площадью контурных карт и поперечных сечений изменений удельного электрического сопротивления формаций в подповерхностном слое. В этом способе ориентация приемников определена на основе обычных способов наземной разведки, и настоящее изобретение не применимо к этому случаю. Другие патенты, относящиеся к геофизическим исследованиям по t-CSEM методам, включают патент США 7388382, выданный Strack и др., патент США 7356411, выданный Stoyer и др., патент США 7328107, выданный Strack и др. и патент США 7340348, выданный Strack и др., которые связаны с патентообладателем настоящего изобретения. Многие из вышеизложенных способов электромагнитной разведки выполняют с расположением группы датчиков электрического и/или магнитного поля на дне водоема. Для точного картографирования геологических структур с использованием таких способов электромагнитной разведки обычно важно обладать возможностью определения геодезической ориентации отдельных датчиков, а также их геодезических мест расположения. Способы определения геодезической ориентации могут включать применение устройств для определения направления для каждого датчика. Другие способы включают измерение относительных амплитуд электромагнитных сигналов в каждом из двух или трех взаимно ортогональных направлений и использование геодезических мест расположения источника электромагнитного сигнала и приемника в качестве привязки для геодезической ориентации сигналов. Указанные последними способы имеют преимущество, заключающееся в исключении необходимости иметь устройства для определения направления для каждого электромагнитного датчика, которые при больших группах датчиков могут быть очень дорогими и ненадежными вследствие большого числа датчиков. Однако указанные последними способы могут быть не точными вследствие упрощающего допущения, к которому прибегают при определении направления сигнала и согласно которому электромагнитная энергия распространяется в вертикальной плоскости, содержащей как источник, так и приемник, а направление поляризации перпендикулярно направлению распространения. Поскольку электрическая проводимость в под-3 018145 поверхностном пространстве неоднородна, такое допущение неточно; напротив, распространение энергии может отклоняться от этой вертикальной плоскости. В действительности необходим способ определения ориентации электромагнитного датчика, который использует направление распространения электромагнитного сигнала, но устраняет погрешность, связанную с распространением электромагнитной волны через подповерхностное пространство, которое может находиться вне указанной вертикальной плоскости. Раскрытие изобретения Способ определения ориентации датчика для электромагнитной разведки согласно одному аспекту изобретения включает расположение этого датчика в выбранном месте на дне водоема. В водоеме в выбранном месте наводят электромагнитное поле. Часть электромагнитного поля регистрируют по меньшей мере вдоль двух взаимно ортогональных направлений возле датчика. Зарегистрированную часть идентифицируют как прошедшую только в вертикальной плоскости, включающей место расположения источника электромагнитного поля и место расположения датчика. Направление поляризации этой части электромагнитного поля определяют на основе зарегистрированной части и известных мест расположений источника и приемника. Определенное таким образом, направление поляризации используют для определения ориентации датчика. Другие аспекты и преимущества изобретения станут понятны из следующего описания и прилагаемой формулы изобретения. Краткое описание чертежей Фиг. 1 А показывает систему для морской электромагнитной разведки, использующую источник тока с горизонтальным электрическим диполем. Фиг. 1B показывает систему для морской электромагнитной разведки, использующую источник тока с вертикальным электрическим диполем. Фиг. 1 С показывает альтернативный метод подачи энергии под поверхность Земли с использованием магнитных полей. Фиг. 2 показывает один пример донного датчика для электромагнитной системы для работы на дне океана. Фиг. 3 А показывает данные, записанные на двух компонентах неориентированного приемника. Фиг. 3 В показывает данные, повернутые по двум компонентам геодезической системы координат. Фиг. 4 А-4 С показывают типичные данные, полученные в результате частотной электромагнитной разведки с управляемым источником (f-CSEM), и обработку полученных данных. Подробное описание Фиг. 1 А показывает один пример морской системы для электромагнитной разведки с управляемым источником с использованием способов в соответствии с разными аспектами данного изобретения. Система содержит исследовательское судно 10, которое перемещается по заранее заданному маршруту вдоль поверхности водоема 11, такого как озеро или океан. На судне 10 расположены средства активации источника, оборудование для записи сигналов и навигационное оборудование, обозначенные в целом 12 и упоминаемые здесь как "управляющая и записывающая система 12". Управляющая и записывающая система 12 содержит управляемый источник электрического тока (не показан отдельно), используемый для подачи питания на электроды 16 А, 16 В, буксируемые в водоеме 11 вблизи дна 13 для создания электрического поля в подповерхностных формациях 15,17 ниже дна 13 водоема 11. Управляющая и записывающая система 12 обычно содержит устройства (не показаны отдельно) для определения геодезического места расположения судна 10 в любой момент времени так, как это может быть выполнено с использованием приемников глобальной навигационной системы (GPS) или подобной. Управляющая и записывающая система 12 в настоящем примере может содержать оборудование для передачи сигналов по меньшей мере от одного регистрирующего буя 22. Регистрирующие буи 22 могут принимать и запоминать сигналы от каждого из нескольких электромагнитных датчиков 20, раположенных в выбранных местах на дне 13. В другом варианте реализации изобретения сигналы датчиков могут быть записаны автономно и на месте, и такие записи могут быть извлечены в конце геодезического исследования. Датчики 20 обычно расположены со стороны поверхности воды в качестве автономных узлов без контроля их конечной ориентации, которая должна быть получена отдельно согласно задачи настоящего изобретения. Места расположения датчиков 20 могут быть определены во время их развертывания, например,известными способами акустической локации. Информация о месте расположения датчиков будет использована так, как это более детально описано ниже. Датчики 20 могут быть также расположены вдоль кабеля 18. В этом случае их ориентации ограничены местом расположения кабеля, определяемым отдельно. Однако даже в этом случае вывод об ориентации приемников может быть неточным, особенно в условиях бурного моря и неровного морского дна,и поэтому настоящее изобретение может быть также полезно в этом случае. Кабель 18 может быть такого типа, который обычно используют для связи с сейсмическими датчиками, располагаемыми на дне водоемов, и известный как "океанические донные кабели". Датчики 20 регистрируют электрические и/или магнитные поля, являющиеся результатом наведенных электрических полей под поверхностью Земли,вызванных током, протекающим через электроды 16 А, 16 В. Датчики 20 более детально пояснены ниже со ссылкой на фиг. 2. Регистрирующие буи 22 могут содержать телеметрические устройства (не показаны отдельно) для передачи данных из принятых сигналов на судно 10 и/или запоминать на месте эти сигналы для последующего опроса управляющей и записывающей системой 12 или другим опрашивающим устройством. В другом варианте реализации изобретения сигналы датчиков могут быть записаны автономно и на месте, и такие записи могут быть извлечены в конце геодезического исследования. Места расположения датчиков 20 могут быть определены во время их развертывания, например, известными способами акустической локации. Информация о месте расположения датчиков будет использована так,как это более детально описано ниже. Источник тока (не показан отдельно) на судне 10 связан с электродами 16 А, 16 В посредством кабеля 14 А. Кабель 14 А выполнен так, что электроды 16 А, 16 В могут буксироваться по существу горизонтально вблизи дна 13, как показано на фиг. 1 А. В настоящем примере электроды могут быть расположены на расстоянии примерно 50 м друг от друга и могут быть запитаны током примерно 1000 Ампер, протекающим через электроды 16 А, 16 В. Это эквивалентно моменту источника, развиваемому в типичных известных электромагнитных геодезических системах, использующих передающий диполь длиной 100 м и ток величиной 500 А. В любом случае момент источника может быть примерно 5104 Ампер-метров. Электрический ток, используемый для питания передающих электродов 16 А, 16 В может быть постоянным током, отключаемым, когда временной, индекс записывания сигнала равен нулю. Однако очевидно,что отключение постоянного тока является только одной реализацией изменения электрического тока,которая нужна для индуцирования переходных электромагнитных эффектов. В других примерах, электрический ток может включаться, переключаться из одной полярности в другую (биполярное переключение), или может переключаться в псевдо-случайной бинарной последовательности (ПСБП или PRBS) или в любом смешанном варианте таких последовательностей переключения. Смотри, например, Duncan,P.M., Hwang, A., Edwards, R.N., Bailey, R.C., and Garland, G.D., 1980, The development and applications of awide band electromagnetic sounding system using pseudo-noise source. Geophysics, 45, 1276-1296 для описания (ПСБП или PRBS) переключений. В данном примере, когда ток, протекающий через электроды 16 А,16 В переключается, производится заданная временным индексом запись электрических и/или магнитных полей, определенных различными датчиками 20 или в датчике в регистрирующих буях 22 и/или в управляющей и записывающей системе 12, в зависимости от конкретной конфигурации записывающего и/или телеметрического оборудования в датчиках 20, регистрирующих буях 22 и /или в управляющей и записывающей системе 12. Система, показанная на фиг. 1 А (так же, как системы, которые показаны и объяснены на фиг. 1 В и 1 С) описана выше как использующая переключаемый постоянный ток для генерации электромагнитных полей в подповерхности. Для целей изобретения необходимо только переключить ток передатчика для генерации, по крайней мере, одного переходного электромагнитного поля. Назначение такого переходного поля применительно к настоящему изобретению будет объяснено ниже. Можно также использовать переменный ток такой же, который обычно используют в частотной электромагнитной разведке, или любой из более сложных непрерывных излучений электромагнитной энергии. Назначение такого устойчиво излучаемого электромагнитного поля применительно к настоящему изобретению будет объяснено ниже. Фиг. 1 В иллюстрирует другую реализацию генерирования и записи сигнала, в которой передающие электроды 16 А, 16 В располагают так, что они ориентированы, главным образом, вертикально вдоль кабеля 14 В, выполненного так, чтобы электроды 16 А, 16 В были ориентированы, главным образом, вертикально, как показано на фиг. 1 В. Питание электродов 16 А, 16 В, детектирование и запись сигналов выполнены, главным образом, так, как объяснено выше применительно к фиг. 1 А. Обращаясь вновь к фиг. 1 А, в некоторых примерах, судно 10 (или второе судно, не показано) может быть также использовано для буксировки источника сейсмической энергии, обозначенного 9. Источник сейсмической энергии является обычногруппой пневматических сейсмоисточников, а также может быть любым иным известным источником сейсмической энергии. Управляющая и записывающая система 12 в этих примерах включает управляющие схемы (не показаны отдельно) для возбуждения сейсмического источника 9 в выбранные моменты времени, и регистрирующие схемы (не показаны отдельно) для записи сигналов, выданных сейсмическими датчиками. В этих примерах океанические донные кабели 18 могут также содержать сейсмические датчики 21. Сейсмические датчики 21 обычно являются четырехкомпонентными датчиками, которые, как известно, содержат три ортогональных геофона или подобных им датчика колебаний или датчика ускорения, связанных с гидрофоном или подобным датчиком, чувствительным к давлению. Четырехкомпонентные сейсмические датчики на океаническом донном кабеле хорошо известны. Смотри, например, патент США 6,021,090, выданный Gaiser и др. В некоторых примерах по существу современная сейсмическая разведка может быть проведена периодической активацией источника 9 сейсмической энергии и записью сигналов, регистрируемых сейсмическими датчиками 21. Интерпретация сейсмических сигналов может быть произведена с использованием известных способов. На фиг. 2 показан один пример электромагнитного датчика более детально. Электромагнитный датчик 20 может быть помещен в корпус 23, сделанный из тяжелого, электрически непроводящего, немагнитного материала, такого как пластмасса высокой плотности, так что электромагнитный датчик 20 бу-5 018145 дет погружен в воду и расположен на дне водоема (13 на фиг. 1 А). Электроды 26 А, 26 В, 28 А, 28 В расположены на дне корпуса 23 таким образом, что они контактируют с дном водоема(13 на фиг. 1 А). Электроды попарно образуют диполи. Если датчик расположен вдоль кабеля, одна пара 26 А, 26 В может быть ориентирована вдоль длины кабеля (18 на фиг. 2), и измерять напряжения в одном направлении. Другая пара электродов 28 А, 28 В измеряет напряжения, индуцированные перпендикулярно к напряжениям первой пары. Если датчики не расположены вдоль кабеля, они тем не менее могут содержать две пары диполей по существу перпендикулярные друг другу. Пары электродов могут находиться друг от друга на расстоянии примерно от 0,1 до 10 м. Фигура нарисована не в масштабе. Пары электродов 26 А, 26 В и 28 А,28 В могут быть связаны с объединенным узлом 24 усилителя и процессора для обработки цифрового сигнала для преобразования детектируемых напряжений в цифровые слова, соответствующие амплитуде напряжения в выбранные моменты времени. В данном примере датчик 20 может содержать один или более магнитометров 30, 32, 34, ориентированных вдоль взаимно-перпендикулярных направлений. В данном примере два магнитометра 30, 32 могут быть ориентированы так, что их оси чувствительности ориентированы вдоль того же направления, что и дипольные моменты соответствующих пар электродов 26 А, 26 В и 28 А, 28 В. Сигнальный выход каждого магнитометра 30, 32, 34 может быть связан с процессором 24 для обработки цифрового сигнала. Выход оцифрованного сигнала процессора 24 может быть связан с регистрирующим буем (22 на фиг. 1 А) для передачи сигнала управляющей и записывающей системе (12 на фиг. 1 А) или для последующего опроса управляющей и записывающей системой (12 на фиг. 1 А) или для хранения на месте для дальнейшего извлечения. В примере системы, показанной на фиг. 1 А и фиг. 1 В, используется электрический ток, приложенный к электродам для создания электрического поля под поверхостью Земли. Альтернативой создания электрических полей является создание магнитных полей, и такое решение будет пояснено с помощью фиг. 1 С. На фиг. 1 С, судно 10 буксирует кабель 14 С, который подсоединен к двум излучателям 17 А и 17 В типа петля. Первый петлевой излучатель 17 А заключает область, перпендикулярную дну водоема 13. Периодически, управляющая и записывающая система 12 вызывает протекание тока через первый петлевой излучатель 17 А. Ток может иметь любую из тех форм, что описывались применительно к фиг. 1 А, в том числе переключаемый постоянный токдок в псевдослучайной двоичной последовательности(PRBS), постоянный ток переменной полярности и переключаемый переменный ток. Когда ток переключается, в Земле возникает магнитное поле в переходном процессе, имеющее дипольный момент вдоль направления МА. В те же или в другие моменты времени ток прикладывают к второму петлевому излучателю 17 В. Второй петлевой излучатель может быть в виде соленоида или катушки, имеющей магнитный момент вдоль направления MB. Разведка, использующая петлевые излучатели 17 А, 17 В, может быть выполнена по существу с порядком проведения разведки, описанной выше применительно к фиг. 1 А. Независимо от того, какие используются источники, показанные на фиг. 1 А или фиг. 1 В, или любые другие источники, в подповерхостный слой передают электромагнитную энергию, которую можно детектировать с использованием датчиков, аких, как показаны на фиг. 2, с компонентой амплитуд электрического и/или магнитного полей, измеренных вдоль двух по существу перпендикулярных направлений. Измеренная компонента амплитуд может быть использована в соответствии с известными способами для определения направления поляризации электромагнитного поля, которое принимает каждый отдельный датчик (например, 20 на фиг. 1 А). Специалистам в данной области техники должно быть понятно, что приемники записывают измерение падающего электромагнитного поля, которое искажается системной характеристикой записывающей системы; это искажение не влияет на определение ориентации приемников до тех пор, пока оно одинаково для обоих по существу перпендикулярных направлений чувствительности. Из уравнений Максвелла известно, что, если среда, в которой расположен приемник, электрически изотропна, и если электромагнитная энергия поступает на приемник в единственном направлении, то поляризация электромагнитной энергии перпендикулярна к этому направлению. А также, если распределение удельного электрического сопротивления в подповерхостном слое Земли горизонтально однородно, то электромагнитное поле распространяется в вертикальной плоскости, содержащей место расположения как источника, так и приемника. Место расположения передатчика и приемника известны или могут быть определены с использованием вспомогательной информации. Для определения ориентации датчика могут быть использованы предыдущие допущения, известные или определенные места расположения, и измеренное направление поляризации. Способ, описанный в настоящем изобретении, доказывает,что вышеприведенные допущения не всегда справедливы, и раскрывает улучшенный способ, в котором обходятся без таких допущений. Ниже изобретение описывается на примере реализации с источниками и приемниками в виде электрических диполей; специалистам в данной области техники понятно, что тот же самый основной принцип, с обычными модификациями может быть распространен на другие типы источников и приемников,и все эти варианты не выходят за рамки данного изобретения. Предполагают, что датчики измеряют ортогональные горизонтальные составляющие полей, хотя настоящее изобретение непосредственным образом может быть расширено специалистами в данной области техники очевидным образом на случаи, когда приемные датчики не ортогональны и/или установлены под углом. Ниже приводятся описания спо-6 018145 соба электромагнитной разведки методом переходных процессов с управляемым источником (t-CSEM),затем способа частотной электромагнитной разведки с управляемым источником (f-CSEM). В t-CSEM способе согласно настоящему изобретению, когда переключают ток для создания неустановившегося электромагнитного поля, часть такого электромагнитного поля будет распространяться непосредственно через воду, после чего будет зарегистрирована датчиками. Другие части электромагнитного поля могут также распространяться через воздух над границей воздуха и воды, прежде чем будут зарегистрированы датчиками. Другие части электромагнитного поля могут также распространяться через формации, расположенные ниже дна водоема, прежде чем будут зарегистрированы датчиками. При таком распространении через подповерхность энергия может отклоняться от вертикальной плоскости,содержащей как источник, так и приемник, из-за сложного распределения удельного электрического сопротивления в подповерхности. Следствием этого является то, что такая энергия может поступать на приемник из неизвестного направления. В таком случае датчик измеряет поступающую поляризацию,хотя фактически ортогональность к направления прихода излучения не может быть использована для определения ориентации датчика, т.к. направление прихода энергии само по себе неизвестно. Также,электромагнитная энергия, распространяющаяся через подповерхность, может поступать из многих направлений одновременно ("множественный переход"), в этом случае однозначного направления прихода не существует. К тому же, в таких случаях измеренная поступающая поляризация не может быть использована для определения ориентации приемника. Также подповерхность может быть электрически анизотропной, так что поступающая поляризация не ортогональна к направлению прихода, даже если направление прихода известно. В таком случае опять измеренная поступающая поляризация не может быть использована для определения ориентации приемника. Выбирая ту часть измеренного электромагнитного поля, которая распространяется только в вертикальной плоскости, содержащей как источник, так и приемник, можно определить ориентацию датчиков без погрешности, вызываемой распространением электромагнитного поля вне этой плоскости через электрически сложные подповерхностные формации. Например, если расстояние источник-приемник достаточно мало, то ранние поступления сигнала (т.е. те поступления, которые происходят через короткое время после возбуждения t-CSEM процесса) будут поступать на датчик прямо через воду, или, может быть, также через воздух, или возможно также отраженные вдоль дна водоема. В этих случаях вышеуказанные допущения более точны, так что распространение энергии происходит, по существу, в вертикальной плоскости, содержащей как источник, так и датчик, вследствие того, что в каждой из этих сред(вода, воздух и грунт соответственно) пространственное распределение удельного электрического сопротивления простое. В этом случае названная "выбранная часть" измеренного электромагнитного поля это раньше пришедшая часть. Для иллюстрации вышеизложенного примера, рассмотрим данные, представленные на диаграмме смещения частиц на фиг. 3 А, 3 В. Диаграмма смещения частиц представляет собой двухкоординатный график временной последовательности, показанный как кривая в двух осях координат. Показаны Е-поле и Н-поле, как до (фиг. ЗА), так и после (фиг. 3 В) определения ориентации приемника. На фиг. 3 А, оси графика являются осями приемника, как развернутые, с неизвестной ориентацией; на фиг. 3 В оси графика построены, чтобы соответствовать таковым при геодезической разведке, т.е. ордината ("ось у") находится в вертикальной плоскости, содержащей как источник, так и приемник, а абсцисса ("ось х") ортогональна к ней. Необходимо отметить, что показано несколько циклов данных, полученных способом tCSEM, (несколько петель каждого поля с различными амплитудами, каждая петля соответствует различному разнесению источника и приемника). Петли электрического (Е) поля, например, ассиметричны. Каждая петля отражает временную последовательность, так что асимметрия означает, что позже приходящая энергия поступает из различных направлений в отличие от ранее приходящей энергии. Любой алгоритм, который выбирает наиболее подходящую ориентацию, будет усреднять эти различные ориентации (как показано на повернутой фиг. 3 В). Это разнообразие направлений является следствием подповерхностного распределения удельного электрического сопротивления, и не имеет ничего общего с истинной ориентацией приемника. На фиг. 3 В для поворота к предполагаемым осям геофизической разведки используют такую наиболее подходящую ориентацию, это обычные "простые" алгоритмы ориентации, которые составляют современный уровень техники, указанный выше. Правильный угол поворота наоборот должен быть взят из ранней, строго прямолинейной части диаграммы смещения частиц, как показано на фиг. 3 В. Эта ранее поступившая энергия прошла только через воду (и возможно воздух и придонный грунт), таким образом достаточно точно соответствуя теоретическим допущениям. Позже приходящая энергия, пройдя через более глубокую подповерхность,отклоняется от линейного азимута вследствие распределения удельного электрического сопротивления в более глубокой подповерхности. Это проявляется в отклонении диаграммы смещения частиц от строго прямолинейной формы, которая требуется теорией для простых формаций. Отклонение между правильным углом и усредненным углом очевидно зависит от места, но даже небольшие отклонения могут быть важны из-за сильной азимутальной зависимости дипольной диаграммы направленности. Длительность движения по прямой во время морской геодезической разведки зависит главным образом от глубины водоема и расстояния источник-приемник, и должна быть определена на основании полученных данных. Электромагнитная энергия обычно распространяется быстрее в глубинной подповерхности, чем в воде или малоглубинной подповерхности, так как удельное электрическое сопротивление обычно больше на глубине. Следовательно, при большом расстоянии источник-приемник, первая приходящая энергия может распространяться непрямыми, более глубокими путями, чем приход прямой волны через воду. В таком случае ранне приходящая энергия может поступать из неизвестных направлений из-за сложного распределения удельного электрического сопротивления глубокой подповерхности,как говорилось выше. Таким образом, на диаграмме смещения частиц для таких расстояний источникприемник строго прямолинейный участок может быть не отображен. Решение этой проблемы состоит в том, чтобы выбрать, из массива данных геофизической разведки,такие расстояния источник-приемник, которые фактически позволят отобразить начальную прямолинейную часть диаграммы смещения частиц. (Обычно такое подмножество получается при наименьших расстояниях источник-приемник, при которых записанный сигнал не такой сильный, чтобы запустить записывающее оборудование нелинейно). Ориентация приемника затем определяется из этого подмножества данных, как указано выше, и естественно допустимо предположить, что ориентация приемника остается неизменной на протяжении всей геодезической разведки, пока приемник не будет перемещен экипажем команды. Следовательно, эта же самая ориентация может быть принята даже для тех расстояний источник-приемник, которые не участвуют в ее определении. Для малых расстояний, в частности, азимут направления источник-приемник может отличаться от предварительной величины по графику или от средней величины. Это происходит, потому что приемник может быть перемещен с предварительно нанесенной на график линии (вследствие неточностей при его расположения), и потому что судно с источником может отклоняться от предварительно выбранного курса из-за ветра или течений. (Фактически фиг. 3 В показывает эти влияния при слегка изменяющихся азимутах прямолинейных частей Е-петель). Эти влияния не вызывают трудностей в ориентации приемников, до тех пор пока в расчете используют действительный азимут направления источник-приемник, а не предварительно нанесенный на график азимут. Для большей точности, ориентацию каждого приемника можно определять отдельно для нескольких расстояний источник-приемник, а результаты могут быть усреднены, допуская, что фактическая ориентация приемника не изменяется. Специалистам в данной области техники понятно, что настоящее изобретение может быть применено отдельно, с любым приемником, к электрическому полю, а, при подходящей модификации и к магнитному полю, вследствие его ортогональности относительно электрического поля. Такие отдельные определения ориентации могут использоваться совместно (например, путем усреднения) или отдельно(например, посредством анализа качества данных) для уточнения определения приемника. В f-CSEM способе в соответствии с настоящим изобретением нет понятия "раннее время", т.к. источник постоянно активен. Все время электромагнитная энергия поступает на приемники от последовательности мест расположения источника и различными путями распространения. Следовательно, описанный выше t-CSEM способ не может быть применен. Одним из способов преодоления этого является прерывание последовательности сигнала f-CSEM источника при выбранных расстояниях источникприемник, с преобразованием в t-CSEM режим поиска для определения ориентации каждого приемника,и затем с продолжением нормальной работы f-CSEM способа при других расстояниях источникприемник. Это представляет собой описанную выше разновидность t-CSEM процедуры, но не удобную в работе. Другой f-CSEM способ может быть описан с использованием фиг. 4 А-4 Д, которые взяты с webсайта http://marineemlab.ucsd.edu Scripps Institution of Oceanography. Двухкомпонентные "Временные Последовательности" на фиг. 4 А показывают записанные сигналы длительностью пять секунд, причем записанные при перемещении судна с источником вдоль линии геофизической разведки. Такие записанные сигналы обрабатываются в зависимости от расстояния источник-приемник в форму, показанную на фиг. 4 В, как "Амплитуда", и на фиг. 4 С, как "Фаза" для данного датчика. Так же на фиг. 4 Д записанные сигналы повернуты в геодезической системе координат, с использованием простого алгоритма, описанного выше, хотя так же как объяснено выше, диаграммы смещения частиц образуют не эллипсы, а скорее более сложные структуры. Кратчайшие расстояния показаны в центрах фиг. 4 В, 4 С и 4 Д, график амплитуды (фиг. 4 В) имеет плоскую область, которая срезана вследствие описанных выше нелинейных эффектов, появляющихся при кратчайших расстояниях. Это явление также проявляется в данных, полученных t-CSEM способом,как упоминалось ранее. Для правильно записанных расстояний, которые немного больше тех, что показаны выше, когда появляется срез плоской области, электромагнитная энергия появляется с большей амплитудой, чем для более длинных расстояний в соответствии с фиг. 4 В-4 Д. Наибольшая энергия при таких выбранных расстояниях источник-приемник распространяется прямыми путями, описанными выше,лежащими в вертикальной плоскости, как описано выше, а энергия, распространяющаяся по другим траекториям из неизвестных направлений (вызываемых неизвестным подповерхностным распределением удельного электрического сопротивления), имеет меньшую амплитуду. Диаграмма смещения частиц построенная с использованием именно этих наиболее энергетичных приходов волн, а приходы волн с низ-8 018145 кой амплитудой в каждом цикле опущены, будет фактически прямолинейной, так как эта выбранная часть сигналов будет наиболее строго соответствовать допущениям о том, что энергия распространялась в вертикальной плоскости, содержащей и источник, и приемник. Как и в случае t-CSEM способа, детали процесса выбора подходящей подсистемы данных, должны определяться самими данными, руководствуясь, приведенными выше аргументами, но в конечном счете основаны на тех частях диаграммы смещения частиц, которые точно прямолинейны. Способы в соответствии с настоящим изобретением могут обеспечить наиболее точное определение ориентации электромагнитного датчика, чем это можно обеспечить, используя известные способы. Несмотря на то что описание настоящего изобретения приведено со ссылкой на ограниченное число примеров, специалистам в данной области, имеющим преимущество раскрытых сведений, понятно, как могут быть внесены изменения без выхода за рамки данного изобретения. Соответственно, рамки изобретения должны быть ограничены только прилагаемой патентной формулой. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения ориентации датчика для электромагнитной разведки, расположенного в выбранном месте, заключающийся в том, что:(i) наводят электромагнитное поле в выбранном месте выше части подповерхности Земли, которую необходимо разведать;(ii) регистрируют часть электромагнитного поля вдоль по меньшей мере двух, по существу, ортогональных направлений в месте расположения датчика, причем указанная часть поля распространяется, по существу, только в вертикальной плоскости, содержащей место наведения поля и место регистрации поля;(iii) определяют направление поляризации указанной части электромагнитного поля на основе зарегистрированной части и(iv) определяют ориентацию датчика на основе определенного направления поляризации. 2. Способ по п.1, в соответствии с которым электромагнитное поле представляет собой неустановившееся электромагнитное поле, а шаг (ii) включает регистрацию амплитуды электрического поля и/или регистрацию амплитуды магнитного поля. 3. Способ по п.1, в соответствии с которым электромагнитное поле представляет собой неустановившееся электромагнитное поле, а шаг (ii) включает выбор части сигналов, которые зарегистрированы датчиком и которые получены в течение выбранного времени после наведения неустановившегося электромагнитного поля. 4. Способ по п.3, в соответствии с которым регистрация части поля, распространяющейся в вертикальной плоскости, на шаге (ii) основана на диаграмме смещения частиц, соответствующей зарегистрированным сигналам и являющейся, по существу, прямолинейной. 5. Способ по п.4, в соответствии с которым прямолинейная часть диаграммы смещения частиц максимизирована посредством выбора по меньшей мере одного расстояния источник-приемник. 6. Способ по п.5, в соответствии с которым указанное по меньшей мере одно расстояние источникприемник представляет собой наименьшее расстояние, при котором датчик достоверно регистрирует получаемую энергию без электронного насыщения и нелинейных эффектов. 7. Способ по п.1, в соответствии с которым электромагнитное поле является, по существу, устойчивым, а шаг (ii) включает регистрацию амплитуды электрического поля и/или регистрацию амплитуды магнитного поля. 8. Способ по п.1, в соответствии с которым электромагнитное поле является, по существу, устойчивым, а шаг (ii) включает выбор части зарегистрированного электромагнитного поля, имеющей наибольшую энергию. 9. Способ по п.8, в соответствии с которым регистрация указанной части электромагнитного поля в вертикальной плоскости на шаге (ii) основана на диаграмме смещения частиц, соответствующей зарегистрированным сигналам и являющейся, по существу, прямолинейной. 10. Способ по п.1, в соответствии с которым шаг (ii) включает измерение электрического поля, наводимого электромагнитным полем, и измерение магнитного поля, наводимого электромагнитным полем, а шаг (iii) включает определение направления поляризации с использованием измеренных электрического и магнитного полей.
МПК / Метки
МПК: G01V 3/12
Метки: датчика, ориентации, определения, разведки, способ, электромагнитной
Код ссылки
<a href="https://eas.patents.su/13-18145-sposob-opredeleniya-orientacii-datchika-dlya-elektromagnitnojj-razvedki.html" rel="bookmark" title="База патентов Евразийского Союза">Способ определения ориентации датчика для электромагнитной разведки</a>
Устройство и способ импульсной электромагнитной разведки с использованием магнитной компоненты электромагнитной антенны
Номер патента: 11318
Опубликовано: 27.02.2009
Автор: Джексон Джон Р.
Метки: электромагнитной, способ, устройство, разведки, магнитной, использованием, антенны, компоненты, импульсной
Формула / Реферат:
1. Устройство для ведения пассивной геофизической разведки, включающее антенну, которая содержит магниторезистивный датчик и предназначена для (i) обнаружения осциллирующей магнитной составляющей электромагнитного излучения, естественно излучаемого участком земли вблизи поверхности, блокируя при этом постоянную составляющую электромагнитного излучения по мере перемещения антенны над указанным участком земли, и (ii) генерирования антенного...
Способ и система морской электромагнитной разведки
Номер патента: 13872
Опубликовано: 30.08.2010
Автор: Циолковски Антон
МПК: G01V 3/12
Метки: морской, система, электромагнитной, разведки, способ
Формула / Реферат:
1. Способ определения отклика земли на электромагнитные сигналы в процессе морской электромагнитной разведки малых глубин, включающий установление в воде на малых глубинах источника и по меньшей мере одного приемника; измерение электромагнитного отклика при двух или более различных расстояниях между находящимися под водой источником и приемником; использование одного или более измерений электромагнитного отклика при большем расстоянии, чтобы...
Способ осуществления электромагнитной разведки с управляемым источником с использованием множественных передатчиков

Номер патента: 12769
Опубликовано: 30.12.2009
Авторы: Виллен Деннис Е., Саммерфилд Филип Дж.
Метки: управляемым, электромагнитной, источником, передатчиков, способ, разведки, осуществления, множественных, использованием
Формула / Реферат:
1. Способ осуществления электромагнитной разведки в подземной области с использованием двух или более электромагнитных передатчиков и разделением комбинированных откликов на приемнике для каждого передатчика, содержащий этапы, на которых: (a) выбирают или конструируют N взаимно ортогональных форм сигнала, по одной на каждый из N передатчиков, где N=2 или более, (b) возбуждают каждый передатчик для периодической передачи его формы сигнала, причем...
Радиолокационная установка и способ измерения для определения ориентации и глубины объекта, находящегося под землей
Номер патента: 2451
Опубликовано: 25.04.2002
Авторы: Грегерсен Оле, Йенсен Оле Киель
МПК: G01V 3/12, G01S 13/04
Метки: установка, землей, объекта, определения, глубины, способ, измерения, ориентации, радиолокационная, находящегося
Формула / Реферат:
1. Установка для генерирования информации, указывающей глубину и ориентацию объекта, расположенного под поверхностью земли, причем установка предназначена для использования электромагнитного излучения, излучаемого и принимаемого антенной системой, связанной с установкой и содержащей передатчик и приемник для генерирования электромагнитного излучения совместно с антенной системой и для приема электромагнитного излучения, отраженного от объекта,...
Способ определения траектории движения (ориентации) человека (спортсмена) или отдельных его частей и устройство для его реализации
Номер патента: 11541
Опубликовано: 28.04.2009
Авторы: Морару Еужен, Николайчук Олег
МПК: A61B 5/11
Метки: человека, способ, устройство, определения, частей, движения, отдельных, реализации, траектории, ориентации, спортсмена
Формула / Реферат:
1. Способ регистрации траектории движения человека или отдельных его частей, состоящий в том, что в значимых точках тела человека размещают элементы, чувствительные к изменению их положения в пространстве, с помощью чувствительных к сигналам этих элементов средств записывают полученную от них информацию, обрабатывают записанную информацию с помощью внешней ЭВМ с получением данных о характере траектории движения человека, отличающийся тем, что на...
Предыдущий патент: Солевые формы ингибитора mtor
Следующий патент: Установка для реакции синтеза углеводородов, реакционная система синтеза углеводородов и способ синтеза углеводородов