Способ определения траектории движения (ориентации) человека (спортсмена) или отдельных его частей и устройство для его реализации
Формула / Реферат
1. Способ регистрации траектории движения человека или отдельных его частей, состоящий в том, что в значимых точках тела человека размещают элементы, чувствительные к изменению их положения в пространстве, с помощью чувствительных к сигналам этих элементов средств записывают полученную от них информацию, обрабатывают записанную информацию с помощью внешней ЭВМ с получением данных о характере траектории движения человека, отличающийся тем, что на руках, ногах и поясе человека размещают по меньшей мере пять трехкоординатных автономных микроконтроллерных устройств измерения перемещений, включающих по три датчика угловых и линейных ускорений, каждый из которых ориентируют в направлении одной из трех взаимно перпендикулярных осей и трехкоординатный полупроводниковый компас, а полученные с их выходов сигналы через аналоговый мультиплексор подают на аналого-цифровой преобразователь, оцифровывают и записывают в энергонезависимую память, данные из которой могут быть считаны через высокоскоростной интерфейс во внешнюю ЭВМ для последующей обработки.
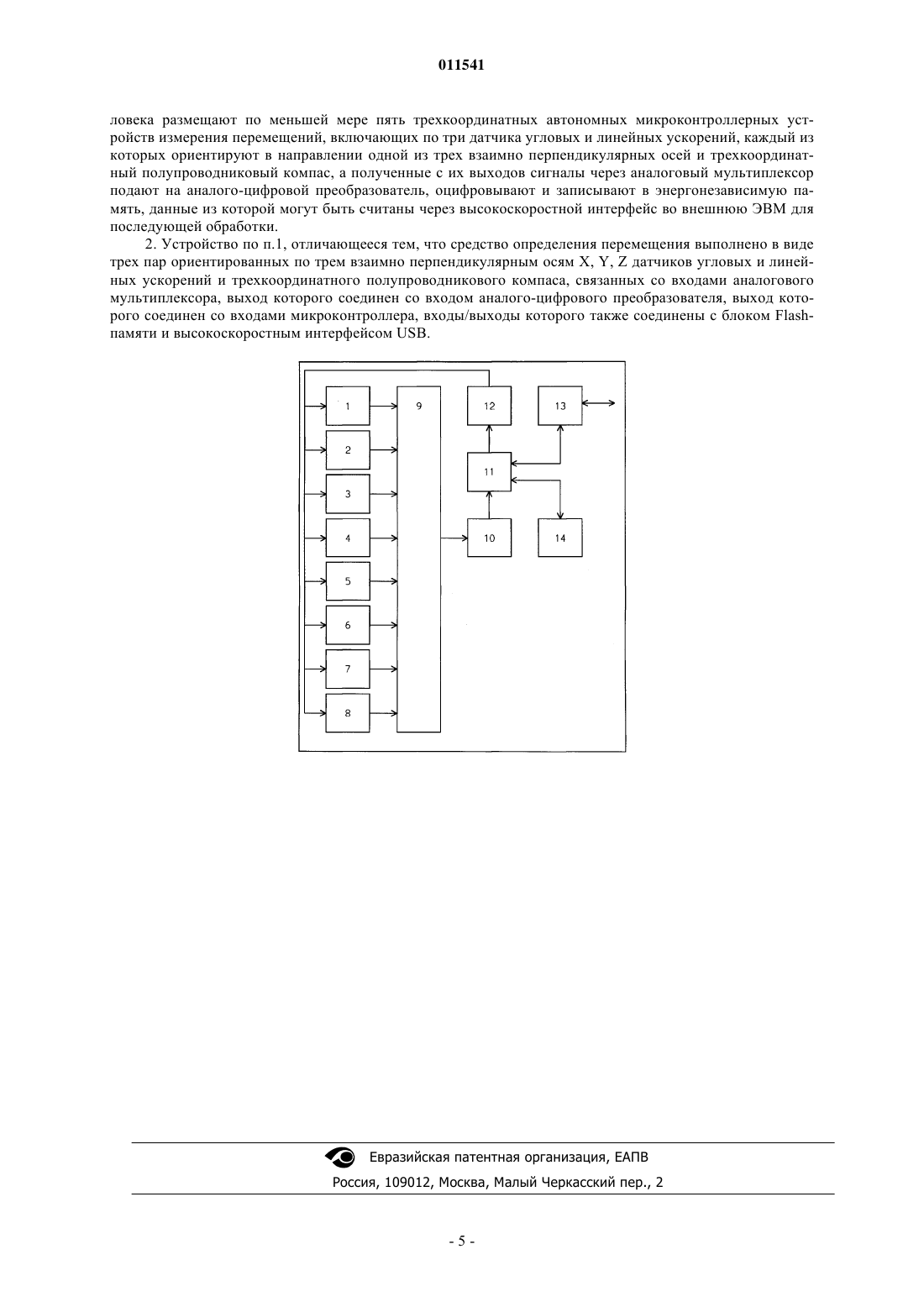
2. Устройство по п.1, отличающееся тем, что средство определения перемещения выполнено в виде трех пар ориентированных по трем взаимно перпендикулярным осям X, Y, Z датчиков угловых и линейных ускорений и трехкоординатного полупроводникового компаса, связанных со входами аналогового мультиплексора, выход которого соединен со входом аналого-цифрового преобразователя, выход которого соединен со входами микроконтроллера, входы/выходы которого также соединены с блоком Flash-памяти и высокоскоростным интерфейсом USB.
Текст
011541 Изобретение относится к области спортивной медицины и более точно касается способа регистрации траектории движения (ориентации) человека (спортсмена) или отдельных его частей и устройства для его осуществления. Известен способ регистрации движений человека (спортсмена) или частей его тела (конечностей),заключающийся в проведении высокоскоростной фотосъемки, ввода изображений в ЭВМ и его последующей обработки с целью вычисления траекторий движения как человека в целом, так и отдельных его частей. Такой способ имеет ряд недостатков: низкую точность определения траектории движения за счет различных ракурсов положения объекта съемки и отсутствия точной привязки координат отдельных частей тела; длительный процесс произведения вычислений, связанный с необходимостью ввода большого числа кадров изображений в ЭВМ и его анализа; предполагает определенные условия освещения человека в ходе съемки; предполагает нахождение человека в пределах прямой видимости кинокамер(ы); имеет высокую стоимость. Известен другой способ регистрации движений человека, состоящий в том, что в значимых точках тела человека (конечности, голова, туловище) размещают элементы, чувствительные к изменению их положения в пространстве, с помощью чувствительных к сигналам этих элементов средств записывают полученную от них информацию, и обрабатывают записанную информацию с помощью ЭВМ с получением данных о характере движений человека. В известном способе используют ряд пассивных отражающих элементов - меток, которые подсвечивают и проводят высокоскоростную съемку с помощью 3-х и более телевизионных камер, соединенных с помощью высокоскоростных аналоговых каналов ввода со специализированной ЭВМ [1-3]. Однако данный способ также требует обязательного нахождения человека в пределах видимости,наличия дополнительного оборудования для подсветки меток, устройство для осуществления этого способа характеризуется высокой стоимостью. Также известен ряд аналогичных способов, основанных на измерении расстояний до меток на определенных частях тела человека с помощью измерения других физических величин, основанные на применении эффекта Холла, пьезорезистивных, электромагнитных и электростатических датчиков. Все эти способы и устройства, их реализующие, имеют общие недостатки: необходимость воздействия на человека электромагнитным или электростатическим полями; ограниченная область действия, обусловленная конечной чувствительностью датчиков; более низкая, чем у оптических способов точность, высокая стоимость. Наиболее близким по сущности (прототипом) являются способ регистрации движений человека и устройство для его осуществления, описанные в [4]. Описываемый способ состоит в том, что в значимых точках тела человека размещают элементы, чувствительные к изменению их положения в пространстве,с помощью чувствительных к сигналам этих элементов средств записывают полученную от них информацию, и обрабатывают записанную информацию с помощью ЭВМ с получением данных о характере движений человека. На теле человека размещают одно трехкоординатное микроконтроллерное устройство измерения угловых ускорений (отклонений), включающее три датчика угловых ускорений, каждый из которых ориентируют в направлении одной из трех взаимно перпендикулярных осей (X, Y, Z) и записывают сигналы с выхода этих датчиков в энергонезависимую память, информацию из которой затем используют для последующей обработки. Описываемые способ и устройство - прототип имеют ряд недостатков. Одним из недостатков является описываемого способа и устройства является относительно низкая точность реконструкции (последующего вычисления) траектории движения части тела (руки, ноги или туловища) человека (спортсмена), на которой закреплено трехкоординатное микроконтроллерное устройство измерения угловых ускорений, что связано с тем фактом, что датчики угловых отклонений измеряют кратковременные относительные угловые отклонения, т.е. их показания зависят и от начального положения объекта, и выдают результат только в короткий промежуток времени при ускоренном движении. При равномерном же движении такие датчики по истечении времени реакции, измеряемого как правило, десятками микросекунд, показывают нулевой результат. Время реакции этих датчиков обуславливается постоянной времени внутренней или внешней RC цепочки интегрирования, подключенной к датчику. Также влияет на точность восстановления траектории движения тот факт, что датчики угловыхускорений имеют постоянно накапливающуюся ошибку измерения при постоянном длительном движении в одном направлении. Существует специальная область знаний - инерциальная навигация, в которой доказывается, что для более-менее точного восстановления траекторий движения точки по показаниям датчиков необходимо иметь в исследуемой точке показания не только трехкоординатных датчиков угловых ускорения, но и также трехкоординатных датчиков линейных ускорений, а также знать угол направления движения по сравнению с направлением на север [5,6]. Это означает, что каждое микроконтроллерное измерительное устройство, закрепляемое на значимой точке тела, должно иметь такой набор датчиков. Кроме того, для ретроспективного восстановления траектории движения всего тела одного микроконтроллерного устройства с вышеуказанным набором датчиков, закрепленного на одной из конечностей-1 011541 явно мало. Необходимо иметь, как минимум, по одному такому устройству с комплектом датчиков на каждой их конечностей и хотя бы один комплект на туловище (поясе) человека (спортсмена). Измерительные устройства с датчиками необходимо закреплять на последних свободных фрагментах конечностей, например, на запястьях и лодыжках. Очевидно, что при этом не удастся восстановить траектории движения кистей рук и ступней ног. Измерительное устройство на поясе человека позволит условно восстановить траекторию движения туловища без учета возможных поворотов, например, нижней части туловища относительно верхней, или изгибов туловища. Таким образом, для более-менее точного восстановления траектории движения человека необходимо как минимум пять комплектов микроконтроллерных измерительных устройств с полным набором датчиков. Для еще более точной реконструкции траектории движения человека необходимо увеличивать количество измерительных систем и закреплять их на каждый движущийся фрагмент тела человека. Целью настоящего изобретения (способа и устройства) является повышение точности определения(реконструкции) траектории движения (ориентации) человека (спортсмена) или отдельной его части. При этом способ и устройство должны быть свободны от указанных выше недостатков, а именно, не требовалось бы для осуществления обязательного внешнего облучения (подсветки) испытуемого, привязки к определенной ограниченной территории (зоне действия датчиков), обязательного нахождения человека в зоне прямой видимости и определенной ориентации относительно принимающих сигналы датчиков средств. Поставленная цель достигается тем, что в способе регистрации траектории движения (ориентации) человека (спортсмена) или отдельных его частей, состоящий в том, что в значимых точках тела человека размещают элементы (трехкоординатные автономные измерительные устройства), чувствительные к изменению их положения в пространстве и способные определять полные пространственные перемещения этих точек, с помощью чувствительных к сигналам этих элементов средств записывают полученную от них информацию в память (автономных носимых устройств), считывают полученные синхронизированные данные из автономных носимых устройств в ЭВМ и обрабатывают информацию с получением реконструкции траекторий движения, как отдельных частей тела человека, так и всего тела в целом. Согласно изобретению для точной реконструкции траектории движения тела человека, на нем (теле) человека размещают в зависимости от необходимой точности реконструкции от 5 до 11 трехкоординатных автономных измерительных устройств, каждое из которых включает по три датчика угловых и линейных ускорений (по три полупроводниковых гироскопа и акселерометра), каждый из которых ориентируют в направлении одной из трех взаимно перпендикулярных осей (X, Y, Z), и полупроводниковый компас. Сигналы с выходов этих датчиков оцифровывают с временным интервалом примерно 1 мс, предварительно обрабатывают их на встроенном микроконтроллере (масштабируют, нормируют, сжимают) и записывают сигналы в Flash (энергонезависимую) память, информацию с которой затем считывается в ЭВМ через быстрый интерфейс (например, USB) и используют для последующей обработки - реконструкции траектории движения тела человека. Поставленная задача решается также тем, что средство определения перемещения заданной точки выполнено в виде: трех ориентированных по трем взаимно перпендикулярным осям (X, Y, Z) датчиков угловых ускорений (полупроводниковых гироскопов), трех ориентированных по трем взаимно перпендикулярным осям датчиков линейных ускорений (полупроводниковых акселерометров), и полупроводникового компаса, связанных со входами аналогового мультиплексора, выход которого соединен со входом аналого-цифрового преобразователя, выход которого соединен с микроконтроллером, выход которого соединен с Flash (энергонезависимой) памятью большого объема, а другой выход подключен к высокоскоростному интерфейсу к которому можно подключать ЭВМ для считывания накопленных данных.Flash (энергонезависимая) память большого объема может быть выполнена как в виде неразъемной встроенной (впаянной) памяти, так и в виде вставляемой в специальное гнездо (слот) внешней Flash памяти, например, обычной Multi Media Card (ММС) или Secure Digital Card (SD) карты. Пример реализации способа. Для реализации описываемого способа используются малогабаритные микроконтроллерные автономные устройства, питающиеся от аккумуляторных батарей, т.е. в рабочем состоянии не связанные проводами ни с каким другим устройством. Комплект датчиков содержит три взаимно-перпендикулярных датчика угловых ускорений -полупроводниковых гироскопов (ориентированных по осям X, Y и Z), три взаимно-перпендикулярных датчика линейных ускорений - полупроводниковых акселерометра и полупроводниковый компас. Выходные сигналы всех датчиков через аналоговый мультиплексор подаются на вход аналого-цифрового преобразователя, где они преобразуются в цифровой вид - оцифровываются. Оцифрованные сигналы поступают на соответствующие входы микроконтроллера, которые производят операции предварительной обработки сигналов (масштабирование,нормирование, вычисление абсолютных приращений по каждой из 3-х осей X,Y и Z). Далее комплект приращений по трем координатам записывается в сжатом виде в Flash память большого объема вместе с временными метками. Такие измерительные устройства закрепляются как минимум на 5 значимых точках тела спортсмена - запястьях, лодыжках и поясе. Это позволяет при выполнении спортсменом произвольных упражнений достаточно точно (без учета движений кистей рук и стоп, а также без учета возможных изгибов и поворотов туловища и головы), с высокой скоростью (до 1000 измерений в секунду) и-2 011541 довольно длительное время (например, при емкости Flash памяти 8 ГБ - примерно 8 мин) на произвольном расстоянии и, при необходимости, вне зоны прямой видимости, производить запись всех его движений. После выполнения спортсменом комплекта упражнений, записанные данные из Flash памяти могут быть достаточно быстро считаны во внешнюю ЭВМ через высокоскоростной интерфейс, например, USB. Считанные данные во внешней ЭВМ могут быть использованы для восстановления траекторий движения основных частей тела спортсмена и получения на экране ЭВМ схематического образа человека - спортсмена, выполняющего определенные упражнения. Воспроизведение записанной информации в замедленном или ускоренном темпе, например, позволит выявить ошибки или неточности в движениях спортсмена при выполнении им определенных упражнений. Очевидно, что такой способ может быть также использован в ряде других практических областей, например, для формирования движений человека при создании анимационных фильмов, в военных областях и т.п. Описанный способ обеспечивают высокую точность измерений, не требуют жестких условий освещения или облучения человека какими-либо полями, не огранивают область нахождения человека; обеспечивают более высокую скорость записи данных, чем высокоскоростная фотосъемка, позволяют регистрировать движения человека (или его частей) значительное время и на значительном расстоянии. Описание устройства поясняется описанием конкретного варианта его осуществления и прилагаемым чертежом, на котором изображена функциональная схема устройства. На фиг. 1 представлена функциональная схема устройства для регистрации траектории движения человека или отдельной его части (руки, ноги, туловища) - трехкоординатное автономное носимое измерительное микроконтроллерное устройство, содержащее три (1, 2 и 3) полупроводниковых датчика угловых ускорений (полупроводниковых гироскопа), расположенных на взаимно-перпендикулярных осях (X,Y, Z), три полупроводниковых датчика (4, 5 и 6) линейных ускорений (полупроводниковых акселерометров), расположенных на взаимно-перпендикулярных осях (X, Y, Z), датчик - полупроводниковый компас 7, датчик напряжения питания 8, аналоговый мультиплексор 9, аналого-цифровой преобразователь 10,микроконтроллер 11, блок управления датчиками 12, высокоскоростной интерфейс USB 13 и энергонезависимую память 14 большого объема. Выходы всех трех взаимно перпендикулярных датчиков угловых ускорений 1, 2 и 3, трех взаимно перпендикулярных датчиков линейных ускорений 4, 5 и 6, полупроводникового компаса 7 и датчика напряжения питания 8 соединены во входами аналогового мультиплексора 9, выход которого соединен с входом аналого-цифрового преобразователя 10, выход которого подключен ко входу микроконтроллера 11, одна группа выходов которого соединена с управляющими входами блока управления датчиками 12,выходы которого соединены с соответствующими входами каждого из датчиков 1-8, другая группа вводов/выводов микроконтроллера 11 соединена с вводами/выводами быстродействующего USB интерфейс 13, выход которого может быть соединен с ЭВМ, а третья группа вводов/выводов микроконтроллера 11 соединена с вводами/выводами быстродействующей Flash (энергонезависимой) памяти 14. Способ регистрации движений человека станет понятным из описания работы устройства. В значимых точках тела человека (конечностях, голове) размещают элементы, чувствительные к их изменению положения в пространстве. Например, для минимальной точности реконструкции движения всего тела на запястьях рук, лодыжках ног и поясе закрепляют по одному трехкоординатному автономному измерительному микроконтроллерному устройству, согласно изобретению. Устройство работает следующим образом. Все три полупроводниковых датчика угловых ускорений 1, 2 и 3 расположены на взаимно-перпендикулярных осях (X, Y, Z) выполнены, например, на базе полупроводниковых гироскопов ADXRS150EB[7] фирмы Analog Devices. При повороте датчика вокруг измерительной оси (при изменении положения контрольной точки в процессе движения человека) на сигнальном выходе относительно средней величины напряжения питания генерируется напряжение, эквивалентное углу поворота датчика за единицу времени, т.е. угловой скорости (скорости поворота датчика). Все три полупроводниковых датчика линейных ускорений 4, 5 и 6 расположены на взаимноперпендикулярных осях (X, Y, Z) выполнены, например, на базе полупроводниковых акселерометровADXL202E[8] фирмы Analog Devices. При смещении датчика вдоль измерительной оси (при сдвиге контрольной точки вдоль оси в процессе движения человека) на сигнальном выходе относительно средней величины напряжения питания генерируется напряжение, эквивалентное величине сдвига датчика за единицу времени, т.е. эквивалентное линейной скорости. Полупроводниковый компас 7 может быть выполнен, например, на базе трехкоординатной микросхемы НМС 1055[9] фирмы Honeywell. На его выходе напряжение эквивалентно отклонению оси датчика от направления на север. Датчик 8 предназначен для измерения напряжения питания датчиков с целью вычисления средней точки напряжения питания. Средняя точка напряжения питания необходима для вычисления положительных или отрицательных сигналов на выходе датчиков. Сигналы с выходов всех датчиков подаются на входы аналогового мультиплексора 9, а с его выхода подаются на вход аналого-цифрового преобразователя 10, выходы которого соединены со входами микроконтроллера 11, выходы которого соединены со входами блока управления датчиками 12, выходы которого соединены с соответствующими входами всех датчиков. Управление датчиками необходимо для минимизации погрешностей измерений. Другие входы/выходы микроконтроллера 11 соединены со входами/выходами высокоскоростного интерфейса USB 13, выход которого может быть-3 011541 соединен со внешней ЭВМ для быстрого считывания накопленных данных. Третьи входы/выходы микроконтроллера 11 соединены со входами/выходами блока Flash (энергонезависимой) памяти 14 большого объема, которая служит для накопления данных. Блок Flash памяти 14 может быть выполнен, например,на базе впаянной микросхемы AT45DB642D[10] или на базе вставляемой в специальный слот обычнойMultimedia карты, например фирмы SunDisk. Узлы аналогового мультиплексора 9, аналого-цифрового преобразователя 10, микроконтроллер 11, интерфейс USB 13 являются внутренними узлами используемой современной микросхемы C8051F342[11] фирмы Silicon Laboratories. Микроконтроллер 11 с высокой скоростью, в несколько сотен раз превышающей частоту регистрации траектории движения человека, осуществляет последовательный опрос входов мультиплексора 9, а аналого-цифровое преобразователь 10 осуществляет их преобразование в цифровую форму. Затем микроконтроллер производит фильтрацию данных и нормализацию данных, вычисляя разницу между выходным сигналом и средней точкой напряжения питания, измеряемого с помощью датчика 8. Сигналы с выходов всех датчиков позволяют вычислить смещение вдоль каждой из осей X, Y и Z, которое сохраняется каждую миллисекунду в Flash памяти 14. Поскольку для всесторонней регистрации движений может использоваться несколько таких устройств, закрепленных, например, на туловище и конечностях, для синхронизации записи в микроконтроллере 11 используется программный таймер реального времени(Real Time Clock - RTC), который может синхронизироваться по интерфейсу USB 13. При заданном периоде регистрации, например, 1 мс, количество байт, записываемых за 1 мс, составляет 4 (long - длинное без знаковое число) для регистрации текущего времени + 3 координаты 4 байта на каждую координату, всего 16 байтов. Очевидно, что за 1 с сохраняется 16 Кбайт данных. При такой скорости записи микросхемы Flash памяти AT45DB642, имеющей объем 8 Мбайт хватит на 500 секунд (8 мин) записи, а ММС карты с объемом 128 М - на 8000 с или 500 мин (примерно 8 ч). Этого вполне достаточно для выполнения человеком-спортсменом любого упражнения, требующего регистрации. При подключении прибора к внешней ЭВМ через интерфейс USB 13 накопленные данных считываются из прибора в ЭВМ. Преимущества предлагаемого способа и устройства состоят в более высокой точности записи траектории движения тела человека (спортсмена); отсутствии необходимости в воздействии на человека внешними электростатическими, электромагнитными или иными полями, вредными для здоровья; испытуемый человек полностью свободен от территориальных ограничений (не связан ни с чем ни проводами, ни креплениями, ни используемым оборудованием, ни зоной видимости или уверенного радиоприема); испытуемый человек свободен от определенной ориентации в пространстве, например, чтобы датчики были освещены или повернуты к приемной антенне или фотоприемнику; скорость регистрации при данном способе и устройстве существенно выше, чем в противопоставляемых устройствах, т.к. не ограничивается необходимостью в ручных измерениях, пропускной способностью каналов связи и т.п. используемые в заявляемом способе устройства автономны, т.е. не имеют во время измерений и регистрации ни связи с компьютером, ни с внешним питанием, следовательно, не имеют проводов и других элементов, мешающих естественному движению испытуемого человека. Литература: 1. Axel Mulder - School of Kinesiology, Simon Fraser University, 8 May 1998. 2. Bioengineering TechnologySystems / Superfluo: ELITE Date. 3. Selspot AB: SELSPOTII Date; Northern Digital Inc.: Optotrak Date. 4. RU 2257846 C1 Способ регистрации движений человека и устройство для его осуществления. 5. В.В. Поддубный - Рестриктивная фильтрация в навигационных системах, Научно-техническая библиотека Тернопольского Государственного Политехнического Университета,http://library.tstu.edu.ua/resources/fileserver. vpodd 1 .pdf. 6. И.M. Данилин, Е.М. Медведев, С.Р. Мельников - Лазерная локация земли и леса, гл. 4. Навигационное обеспечение лазерной локации, http://www.ssga.ru/metodich/les/ 4.html 7. http://www.analog.com/UploadedFiles/Evaluation Boards/Tools/9303074ADXRS150EB0.pdf 8. http://www.ainalog.com/UploadedFiles/DataSheets/ADXL202E.pdf 9. http://www.ssec.honeywell.com/magnetic/datasheets/hmcl055.pdf 10. http://www.atmel.com/dyn/resources/proddocuments/doc3542.pdf 11. http://www.silabs.com/public/documents/tpubdoc/dsheet/Microcontrollers/USB/en/C805lF34x.pdf ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ регистрации траектории движения человека или отдельных его частей, состоящий в том,что в значимых точках тела человека размещают элементы, чувствительные к изменению их положения в пространстве, с помощью чувствительных к сигналам этих элементов средств записывают полученную от них информацию, обрабатывают записанную информацию с помощью внешней ЭВМ с получением данных о характере траектории движения человека, отличающийся тем, что на руках, ногах и поясе че-4 011541 ловека размещают по меньшей мере пять трехкоординатных автономных микроконтроллерных устройств измерения перемещений, включающих по три датчика угловых и линейных ускорений, каждый из которых ориентируют в направлении одной из трех взаимно перпендикулярных осей и трехкоординатный полупроводниковый компас, а полученные с их выходов сигналы через аналоговый мультиплексор подают на аналого-цифровой преобразователь, оцифровывают и записывают в энергонезависимую память, данные из которой могут быть считаны через высокоскоростной интерфейс во внешнюю ЭВМ для последующей обработки. 2. Устройство по п.1, отличающееся тем, что средство определения перемещения выполнено в виде трех пар ориентированных по трем взаимно перпендикулярным осям X, Y, Z датчиков угловых и линейных ускорений и трехкоординатного полупроводникового компаса, связанных со входами аналогового мультиплексора, выход которого соединен со входом аналого-цифрового преобразователя, выход которого соединен со входами микроконтроллера, входы/выходы которого также соединены с блоком Flashпамяти и высокоскоростным интерфейсом USB.
МПК / Метки
МПК: A61B 5/11
Метки: траектории, человека, движения, реализации, ориентации, устройство, частей, способ, отдельных, определения, спортсмена
Код ссылки
<a href="https://eas.patents.su/6-11541-sposob-opredeleniya-traektorii-dvizheniya-orientacii-cheloveka-sportsmena-ili-otdelnyh-ego-chastejj-i-ustrojjstvo-dlya-ego-realizacii.html" rel="bookmark" title="База патентов Евразийского Союза">Способ определения траектории движения (ориентации) человека (спортсмена) или отдельных его частей и устройство для его реализации</a>
Способ определения двигательной активности человека (спортсмена) и устройство для его реализации
Номер патента: 11540
Опубликовано: 28.04.2009
Авторы: Морару Еужен, Николайчук Олег
МПК: A61B 5/11
Метки: активности, способ, реализации, определения, человека, спортсмена, устройство, двигательной
Формула / Реферат:
1. Способ определения двигательной активности человека, состоящий в том, что в значимых точках тела человека размещают элементы, чувствительные к изменению их положения в пространстве, с помощью чувствительных к сигналам этих элементов средств записывают полученную от них информацию и обрабатывают записанную информацию с помощью ЭВМ с получением данных о характере движения человека, отличающийся тем, что на теле человека, а точнее на запястье...
Способ и устройство для определения моды движения бурильной колонны
Номер патента: 7498
Опубликовано: 27.10.2006
Автор: Хатчинсон Марк У.
МПК: E21B 47/024
Метки: бурильной, движения, устройство, определения, способ, колонны, моды
Формула / Реферат:
1. Способ определения моды движения бурильной колонны, в котором измеряют поперечное ускорение бурильной колонны; определяют поперечное положение бурильной колонны относительно времени, исходя из измерений ускорения; и определяют моду, исходя из указанного положения относительно времени. 2. Способ по п.1, отличающийся тем, что поперечное ускорение измеряют в направлениях, перпендикулярных друг другу и оси бурильной колонны. 3. Способ по п.1,...
Способ определения заданного относительного положения пациента в стоматологическом панорамном рентгеновском аппарате и заданной траектории перемещения этого аппарата относительно пациента, а также соответствующее устройство
Номер патента: 10698
Опубликовано: 30.10.2008
Автор: Томс Михаэль
МПК: A61B 6/14
Метки: рентгеновском, аппарате, относительно, заданной, устройство, соответствующее, пациента, аппарата, также, перемещения, панорамном, положения, этого, траектории, определения, заданного, способ, стоматологическом, относительного
Формула / Реферат:
1. Способ определения заданного относительного положения пациента в стоматологическом панорамном рентгеновском аппарате, при осуществлении которого: а) определяют кривизну передней части 72, 74 зубной дуги 68, 70 пациента и б) на основе полученной кривизны передней части зубной дуги и на основе изогнутой плоскости 88 проекции панорамного рентгеновского аппарата 10 вычисляют заданные координаты положения челюсти 24, 26 пациента, отличающийся тем,...
Способ определения опасности отложения льда вследствие атмосферных осадков и устройство для реализации способа
Номер патента: 7342
Опубликовано: 25.08.2006
Автор: Нилсен Эван
МПК: B64D 15/20, G01W 1/14
Метки: опасности, отложения, определения, способа, льда, реализации, вследствие, устройство, осадков, атмосферных, способ
Формула / Реферат:
1. Способ определения опасности отложения льда вследствие атмосферных осадков, включающий измерение температуры воздуха и оценку типа атмосферных осадков и количества атмосферных осадков, отличающийся тем, что проводят измерения для определения фактического количества осадка и на основании результатов указанных измерений вычисляют по меньшей мере один из следующих факторов для определения опасности отложения льда: срок действия антиобледенителя,...
Радиолокационная установка и способ измерения для определения ориентации и глубины объекта, находящегося под землей
Номер патента: 2451
Опубликовано: 25.04.2002
Авторы: Грегерсен Оле, Йенсен Оле Киель
МПК: G01S 13/04, G01V 3/12
Метки: измерения, способ, объекта, установка, радиолокационная, ориентации, определения, землей, глубины, находящегося
Формула / Реферат:
1. Установка для генерирования информации, указывающей глубину и ориентацию объекта, расположенного под поверхностью земли, причем установка предназначена для использования электромагнитного излучения, излучаемого и принимаемого антенной системой, связанной с установкой и содержащей передатчик и приемник для генерирования электромагнитного излучения совместно с антенной системой и для приема электромагнитного излучения, отраженного от объекта,...
Предыдущий патент: Способ определения двигательной активности человека (спортсмена) и устройство для его реализации
Следующий патент: Способ определения двигательной активности человека (спортсмена) и устройство для его реализации
Случайный патент: Способ и средства для получения в покрытии, содержащем магнитные частицы, магнитно-индуцированных знаков