Дозирующий насос
Формула / Реферат
1. Дозирующий насос с поршнем (3), содержащий электромагнит (1) с обмоткой и электронную плату с микроконтроллером,
отличающийся тем, что для контроля хода поршня (3)
электромагнит (1) снабжен неподвижной тарелкой и подвижной тарелкой (2), закрепленной относительно указанного поршня (3) так, что каждому перемещению поршня (3) соответствует разное расстояние между указанными тарелками и, соответственно, разное значение импеданса самого электромагнита (1);
электромагнит (1) соединен с указанной электронной платой с микроконтроллером дозирующего насоса;
указанная электронная плата с микроконтроллером выполнена с возможностью детектирования в реальном времени положения поршня (3) путем контроля изменений значения импеданса (Z) электромагнита (1), вызванных изменениями индуктивности; причем Z=V/I при постоянном напряжении (V = constant), а формула, выражающая изменение тока для указанного импеданса, с помощью которой можно представить эквивалентную электрическую схему электромагнита (1), имеет следующий вид:
где R - активное сопротивление обмотки;
L - индуктивность электромагнита, изменяющаяся во времени при перемещении тарелки (2) и, соответственно, поршня (3), прикрепленного к указанной тарелке;
V - приложенное постоянное напряжение;
е - число Непера, равное 2,7182.
2. Дозирующий насос по п.1, отличающийся тем, что поршень (3) прикреплен к мембране (4), расположенной в корпусе (5) насоса, и подвижная тарелка (2) выполнена с возможностью перемещения мембраны (4) внутри корпуса (5) насоса, с обеспечением тем самым закачивания жидкой добавки в систему, в которой установлен насос, при подаче на электромагнит (1) импульсной последовательности, создающей прерывистое магнитное поле, обеспечивающее притяжение и отпускание подвижной тарелки (2) с поршнем (3); при этом микроконтроллер конфигурирован для сохранения в своей памяти точного значения хода поршня, соответствующего значению индуктивности, детектированному микроконтроллером.
3. Дозирующий насос по п.1, отличающийся тем, что электронная плата выполнена с возможностью посылать первый импульс для измерения индуктивности при первом включении насоса для установления соотношения между ходом поршня и индуктивностью электромагнита; причем первый импульс конфигурирован для побуждения поршня (3) к совершению полного хода и микроконтроллер выполнен с возможностью измерять ток в электромагните (1) с интервалами в одну миллисекунду, сохраняя в своей внутренней памяти измеренные значения тока и хода поршня, с одновременным вычислением импеданса электромагнита.
4. Дозирующий насос по п.1, отличающийся тем, что микроконтроллер выполнен с возможностью регулирования хода поршня (3) путем модуляции импульсного тока при фиксированной частоте в электромагните на основании детектированных значений индуктивности, сравниваемых со значениями, имеющимися во внутренней памяти микроконтроллера, связывающего их с ходом поршня.
5. Дозирующий насос по п.1, отличающийся тем, что микроконтроллер выполнен с возможностью регулирования хода поршня (3) путем модуляции тока, необходимого электромагниту (1) для перемещения поршня (3).
6. Дозирующий насос по п.1, отличающийся тем, что микроконтроллер выполнен с возможностью проверки и оценки скорости перемещения поршня (3) для выявления состояния "Недогрузка", то есть для детектирования отсутствия добавки внутри корпуса насоса в штатном режиме работы насоса.
7. Дозирующий насос по п.1, отличающийся тем, что микроконтроллер выполнен с возможностью проверки и оценки скорости перемещения поршня (3) для выявления состояния "Перегрузка", то есть для выявления возможной закупорки или избыточного давления в линии подачи насоса в штатном режиме работы насоса.
8. Дозирующий насос по п.1, отличающийся тем, что электронная плата с микроконтроллером дополнительно выполнена с возможностью установки взаимосвязи между значением индуктивности и положением, занимаемым поршнем (3) во время своего хода, и определения на основе заданных пользователем параметров настройки, в каком положении необходимо блокировать ход поршня с точностью до сотых долей.
9. Дозирующий насос по п.1, отличающийся тем, что электронная плата с микроконтроллером выполнена с возможностью контроля подаваемого на электромагнит (1) тока для предотвращения бесполезных потерь энергии и включения его соленоида путем подачи тока точной величины, контролируя перемещение поршня путем вычисления импеданса и принятия решения о блокировке поршня в точно определенном положении, которое можно задать путем калибровки электронной платы без использования механической системы для контроля производительности насоса.
10. Дозирующий насос по п.1, отличающийся тем, что для контроля хода поршня (3) так, чтобы обеспечить мгновенное изменение объема впрыска дозирующего насоса, электронная плата с микроконтроллером выполнена с возможностью определения, достигнут ли предварительно заданный конец хода поршня, и контроля в реальном времени того, что происходит в электромагните (1) путем вычисления импеданса и определения точного момента, когда следует остановить поршень (3).
11. Дозирующий насос по п.10, отличающийся тем, что он дополнительно содержит последовательный порт для подсоединения к компьютеру или другому подобному электронному устройству для дистанционного сбора информации, накопленной микроконтроллером, и/или для вмешательства в работу насоса.
12. Дозирующий насос по п.11, отличающийся тем, что электромагнит (1) выполнен с возможностью, при соответствующем включении его посредством электронной платы и возвращении в исходное состояние посредством пружины, приведения в действие поршня (3) в импульсном режиме в предпочтительном диапазоне частот от 0 до 360 импульсов в минуту.
13. Дозирующий насос по п.12, причем электронная плата выполнена с возможностью постепенного включения электромагнита (1) малыми приращениями напряжения и одновременного измерения тока, протекающего через соленоид указанного электромагнита, для получения соответствующего значения импеданса, непосредственно связанного с положением поршня (3) вдоль предусмотренного максимального хода поршня; причем электронная плата дополнительно выполнена с возможностью с точностью до сотых долей задавать точный момент остановки поршня, то есть его максимальный ход, путем потенциометрического или цифрового регулирования, непосредственно настраиваемого оператором через интерфейс электронной платы, с обеспечением возможности варьировать с высокой точностью количество впрыскиваемой добавки при каждом единичном включении электромагнита.

Текст
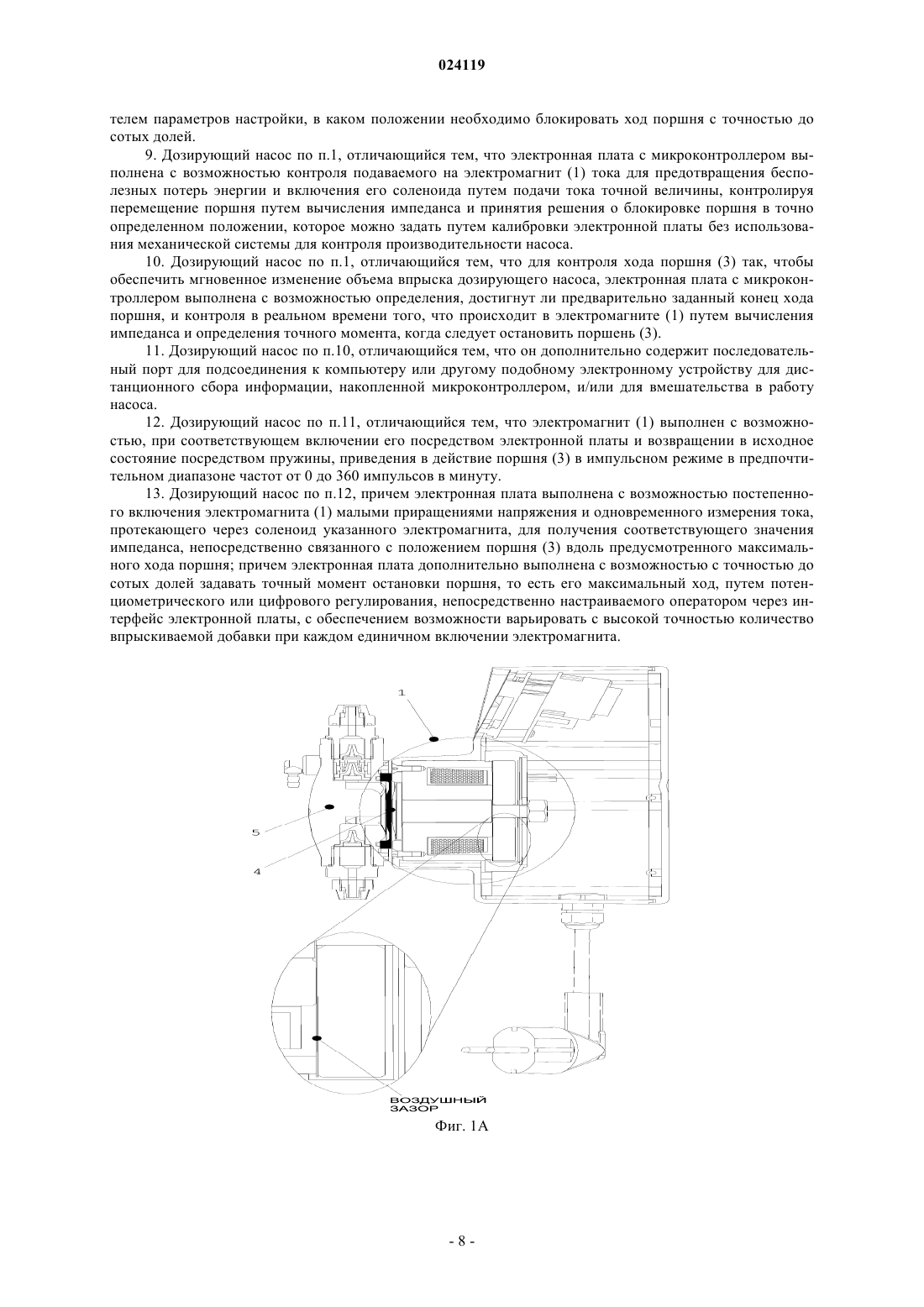
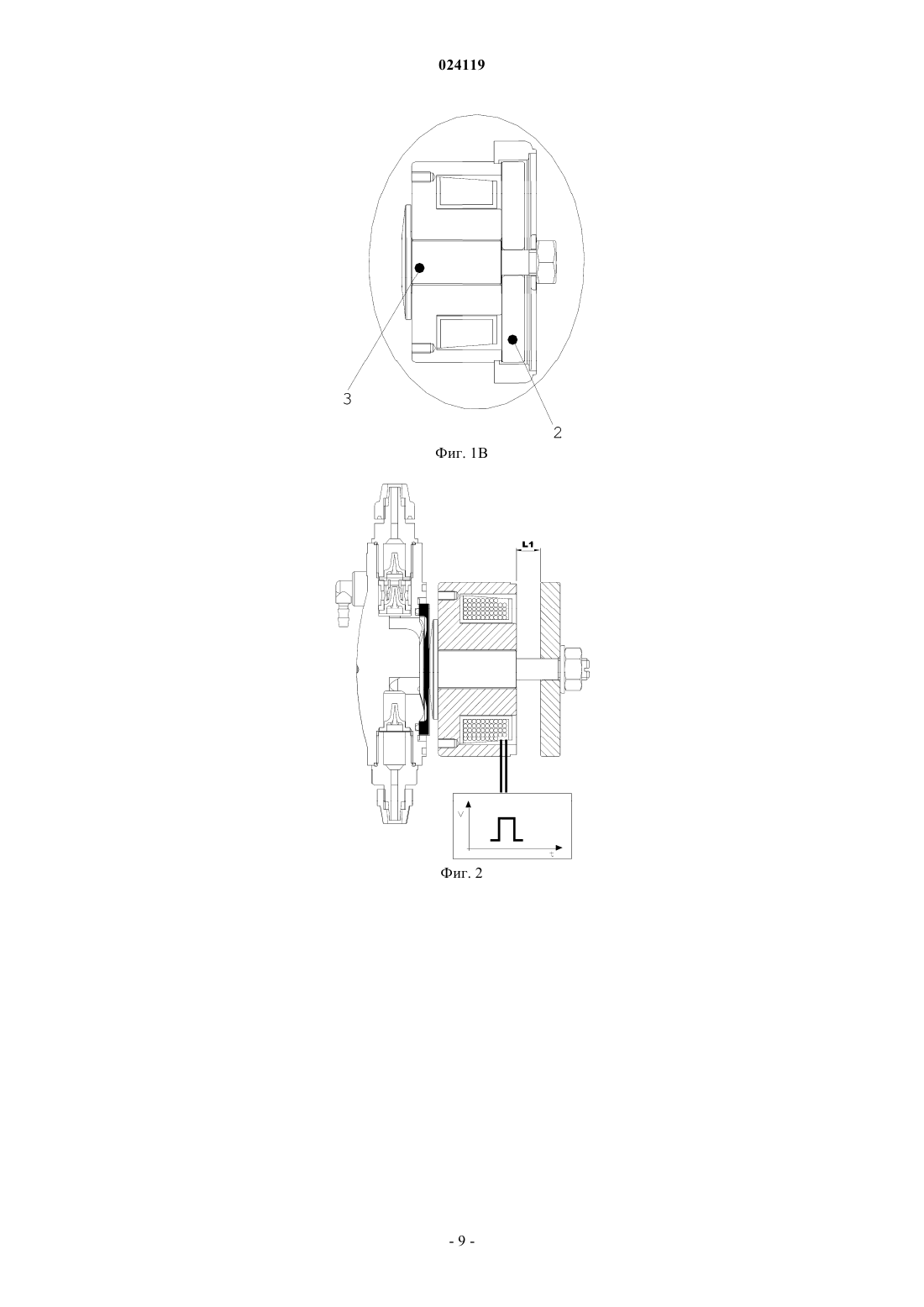
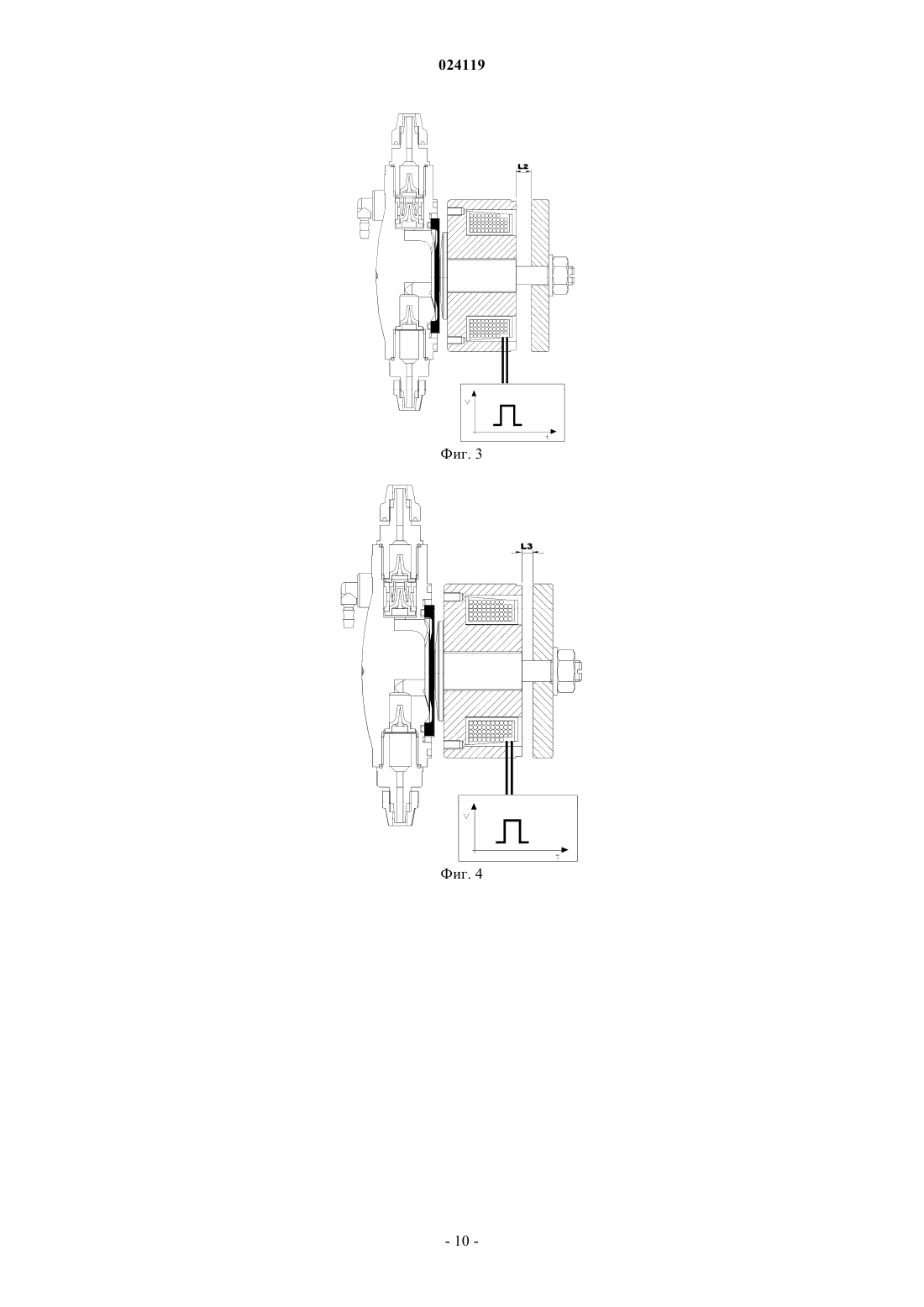
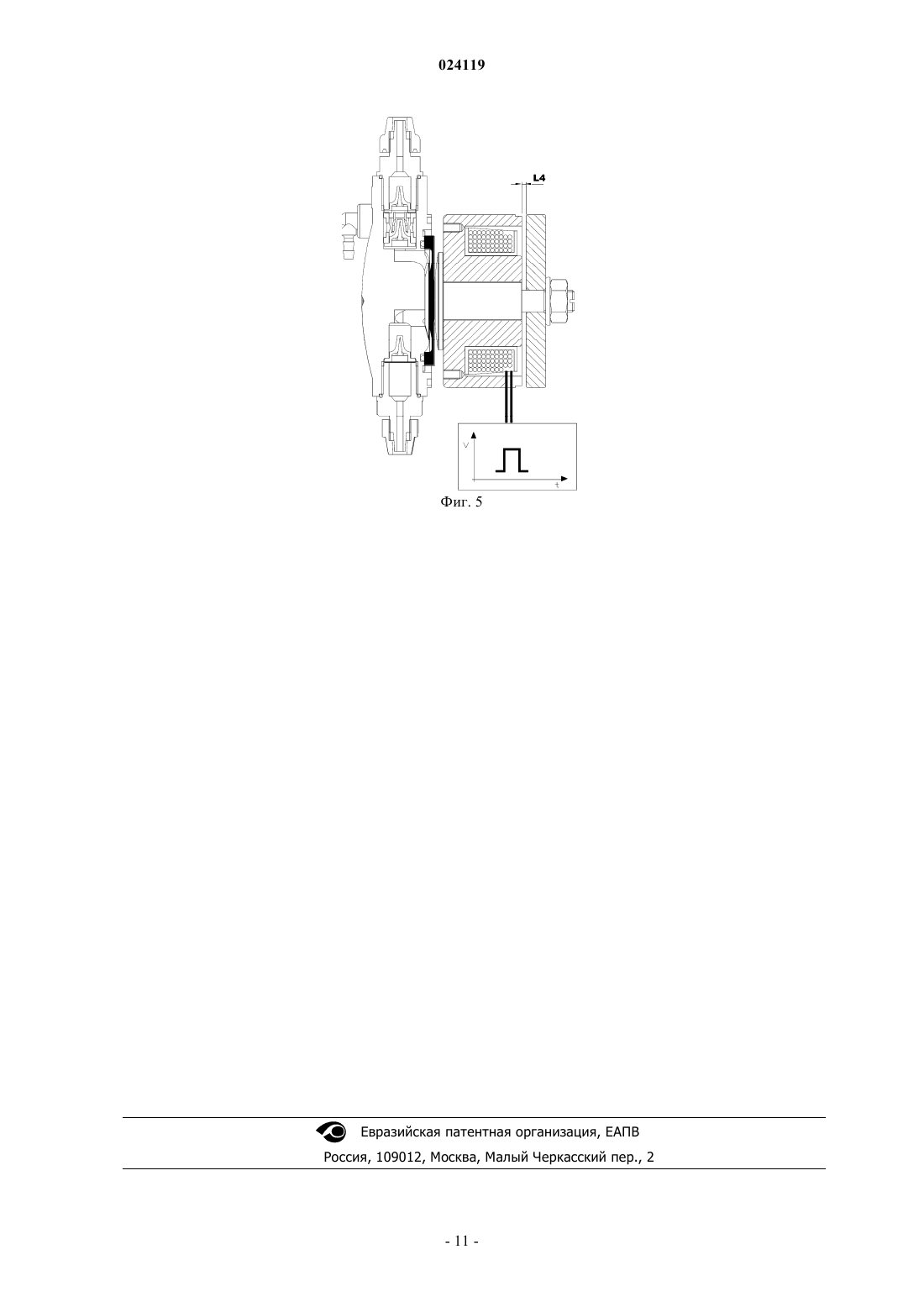
Согласно изобретению предложен дозирующий насос с поршнем (3), содержащий электромагнит(1) с обмоткой и электронную плату с микроконтроллером. При этом для контроля хода поршня(3) электромагнит (1) снабжен неподвижной тарелкой и подвижной тарелкой (2), закрепленной относительно указанного поршня (3) так, что каждому перемещению поршня (3) соответствует разное расстояние между указанными тарелками и, соответственно, разное значение импеданса самого электромагнита (1); электромагнит (1) соединен с указанной электронной платой с микроконтроллером дозирующего насоса; указанная электронная плата с микроконтроллером выполнена с возможностью детектирования в реальном времени положения поршня (3) путем контроля изменений значения импеданса (Z) электромагнита (1), вызванных изменениями индуктивности; причем Z=V/I при постоянном напряжении (V=constant), а формула, выражающая изменение тока для указанного импеданса, с помощью которой можно представить эквивалентную электрическую схему электромагнита (1), имеет следующий вид: i(t)=(V/R)[1-е-(R/L)t], где R активное сопротивление обмотки; L - индуктивность электромагнита, изменяющаяся во времени при перемещении тарелки (2) и, соответственно, поршня (3), прикрепленного к указанной тарелке; Проетти Де Маркис Роберто (IT) Котов И.О., Харин А.В. (RU) Настоящее изобретение относится, по существу, к области дозирующих насосов с электромеханическим приводом, предназначенных для дозирования жидкостей. Подобные дозирующие насосы используют для дозирования различного рода добавок путем регулирования объема жидкости, перекачиваемой за каждый цикл. Данные устройства нашли широкое применение в различных отраслях промышленности, а также в быту. Например, дозирующие насосы используют для очистки питьевой воды, в общественных и частных бассейнах, в оборудовании для мойки автомобилей, в прачечных, в гальваническом оборудовании, в химической промышленности, в башенных охладителях, при удобрительном орошении, в агропищевой промышленности и в различных других сферах. Рассмотрим более подробно принцип работы типового дозирующего насоса. В указанных насосах дозирование происходит за счет импульсного перемещения механического элемента, именуемого "мембраной" и расположенного в так называемом корпусе насоса. Указанная мембрана, толкаемая поршнем,перемещает дозируемую жидкость в специально предусмотренный нагнетательный канал в корпусе насоса. Затем дозируемая жидкость попадает в обрабатываемую систему, преодолевая противодавление в трубопроводе, в который ее впрыскивают. Таким образом, ключевым элементом, обеспечивающим усилие, необходимое для эффективного перемешивания дозируемой и обрабатываемой жидкостей, является поршень. Он представляет собой элемент, перемещающий мембрану, которая всасывает жидкость в корпус насоса из входной трубы и обеспечивает впрыскивание ее в нагнетательную трубу в циклическом режиме. Указанный поршень приводится в действие электромагнитом, который, соответственно, является основным компонентом насоса. Электромагнит состоит из неподвижной части, в которой размещена обмотка, и подвижной части, именуемой "тарелка" и закрепленной на поршне. Следует отметить, что указанная тарелка, по существу, является элементом для замыкания магнитного потока электромагнита, причем указанный поток обеспечивает возврат тарелки к неподвижной части электромагнита, таким образом, обеспечивая ее перемещение. Другими словами, электромагнит обеспечивает возможность преобразования электрической энергии в механическую для совершения работы и движения жидкости. Следовательно, электрические и механические характеристики дозирующего насоса зависят от конструкции, способа включения и контроля указанного электромагнита. При этом электронная плата, предусмотренная в насосе, обеспечивает только лишь подачу питания на электромагнит и оптимальное управление подачей электрической энергии на электромагнит. Таким образом, очевидно, что чем лучше осуществляется указанный контроль, тем выше КПД дозирующего насоса. Это очень важный коэффициент, поскольку после начала процесса дозирования в обрабатываемой системе указанное дозирование необходимо выполнять непрерывно и с минимальным потреблением электроэнергии. В некоторых случаях требуется дозирующий насос для подачи небольших объемов жидкости при каждом впрыске. В результате, для того чтобы выполнить дозирование объема, необходимого для обработки, следует произвести большое количество вспрысков. Добиться этого можно за счет регулирования хода поршня, причем при заданных одинаковых впрысках путем указанного регулирования удается обеспечить надлежащее дозирование объема жидкости. Следовательно, предлагаемое изобретение относится к области замкнутых систем регулирования, в которых входная переменная (в настоящем изобретении эта переменная представляет собой ток, подаваемый на электромагнит) регулируется системой посредством обратной связи на основе контроля соответствующих физических величин, которые можно согласовать с контролируемой переменной, т.е. с объемом впрыска. Достижения в области дозирующих насосов были связаны с развитием области электромагнитов, а также с исследованиями и изучением различных систем управления и контроля. Целью указанных исследований являлось устранение следующих недостатков: потери энергии, связанные с тем, что раньше на электромагнит подавался импульс напряжения постоянной длительности независимо от усилия, необходимого для преодоления противодавления в системе. По существу, потери энергии тем больше, чем меньше давление в системе с обрабатываемой жидкостью и, соответственно, чем меньше усилие, необходимое для преодоления указанного противодавления; чрезмерный нагрев оборудования и, в частности, электромагнита вследствие того, что раньше не предусматривался контроль подаваемой энергии в зависимости от преодолеваемой силы, как описано в предыдущем абзаце; при этом происходит снижение производительности из-за увеличения сопротивления обмотки при среднем - длительном времени работы; ограниченный срок службы из-за средней - высокой рабочей температуры электронных компонентов и электромагнита; необходимость наличия механического устройства для калибровки хода поршня с целью получения заданной производительности насоса, что требует установки в электромагните регулировочных шайб; необходимость наличия механических систем для регулирования хода поршня, которые ограничивают ход поршня лишь механически и, следовательно, обеспечивают уменьшение впрыска без пропорционального понижения электрической энергии, подаваемой на электромагнит; в результате, уровень потребления энергии не меняется даже при минимальной подаче вещества при одинаковых впрысках. Такого рода устройства отличается невысоким КПД. Из документа US 20090206184 известна система впрыска топлива в камеру сгорания с контролем топливного инжектора за счет использования датчика, который регистрирует перемещение подвижного поршня, скользящего во вспомогательном канале и выполненного отдельно от игольчатого клапана. Назначение указанной системы заключается в отслеживании и обработке сигнала перемещения вспомогательного поршня для контроля работы указанного инжектора в случае возникновения каких-либо неисправностей (блокировка в положении "включено" или "выключено"), в случаях нарушения геометрических размеров форсунок, инжектора или камеры, а также в случаях, когда необходимо изменить форму импульса впрыска топлива. Согласно техническому решению, раскрытому в документе US 20090206184,перемещение поршня зависит от разности давлений на его концах: на верхний конец действует давление подачи топлива, создаваемое перед системой впрыска, а на нижний конец действует давление в "прединъекционной" камере, объем которой зависит от соответствующих геометрических размеров. Очевидно, что указанная разность давлений зависит от давления подачи топлива, частоты подачи и состояния инжектора. По существу, возможны три различных состояния инжектора, а именно закрыт ("выключен"),промежуточное состояние ("блокировка") и открыт ("включен"), определяющие соответственно следующие ситуации: "выключен": форсунки закрыты игольчатым клапаном, "прединъекционная" камера сообщается с каналами подачи, при этом на концы подвижного поршня действует одно и то же давление;"блокировка" - форсунки по-прежнему закрыты, каналы подачи геометрически закрыты, при этом"прединъекционная" камера отделена от каналов подачи; "включено" - проход к форсункам открыт,"прединъекционная" камера не сообщается с каналами подачи, при этом подвижный поршень перемещается вниз под действием отрицательного давления, создаваемого при открытии отверстия форсунок. Предлагаемое изобретение имеет ряд существенных отличий от системы впрыска, описанной в документе US 2009206184, в которой независимо от типа инжектора или используемого контроля топливный насос полностью отделен от инжектора. По существу, в предлагаемом изобретении работой насоса и впрыском управляет одно и то же устройство, содержащее электромагнит с контролируемым включением, поршень и мембрану. Указанная мембрана выдавливает жидкость в канал, открытие/закрытие которого обеспечивают специальные клапаны, работающие исключительно при гидродинамическом воздействии. Кроме того, в документе US 2009206184 описано устройство управления, содержащее вспомогательный поршень, установленный с возможностью перемещения при изменении условий впрыска. Перемещения указанного поршня регистрируются специальным датчиком. При этом данные об указанных перемещениях обрабатываются для изменения условий подачи на входе и для восстановления объемов и давления в "прединъекционной" камере. Согласно же настоящему изобретению, измеряя изменение импеданса, создаваемого в электрической цепи электромагнита при изменении положения насосного поршня, можно определять положение самого поршня и, соответственно, контролировать подачу энергии для обеспечения предварительно заданного расхода жидкости. Другими словами, можно контролировать перемещение устройства путем измерения его электрических характеристик, при этом отпадает необходимость в использовании косвенных измерений параметров других подвижных элементов. Более того, в техническом решении согласно US 2009206184 возможна коррекция положения вспомогательного поршня в определенной конфигурации посредством дополнительного привода. В этом случае данные о перемещениях поршня, регистрируемых датчиком, также обрабатываются для восстановления объема и давления в "прединъекционной" камере. Напротив, в настоящем изобретении, обрабатывая результаты измерений импеданса электрической цепи электромагнита, можно изменить положение насосного поршня и, следовательно, обеспечить заданный расход жидкости. Таким образом, можно контролировать перемещение устройства путем непосредственного воздействия на насосный поршень, не прибегая к использованию дополнительных приводов в "прединъекционной" камере. И в заключение следует отметить следующее. Система впрыска, известная из документа US 2009206184, предусматривает, что насосное устройство, инжекторы, вспомогательный поршень, датчик перемещения и привод вспомогательного поршня являются отдельными элементами, при этом регулирование осуществляется на основе сигнала, выявляемого устройством, дополнительным (датчик + привод) по отношению к насосному элементу. В отличие от этого предлагаемая в настоящем изобретении система управляет только насосным устройством посредством измерения и контроля электрических параметров магнита, то есть насосное устройство одновременно выполняет функции датчика и привода без помощи каких-либо дополнительных элементов. Кроме того, из публикации WO 2007/007365 известен дозирующий насос, который меняет положение рабочей точки на графике тока в зависимости от изменения индуктивности и определяет путем вычислений, выполняемых электронным устройством, точку контакта тарелки и сердечника электромагнита. Таким образом, устройство определяет конец хода поршня и может отключить электромагнит, предотвращая бесполезные потери энергии и, соответственно, тепловые потери, которые отрицательно влияют на производительность изделия. Предлагаемое изобретение также предусматривает измерение тока, используемое для расчета импеданса. Однако, в отличие от технического решения, описанного в WO 2007/007365, настоящее изобретение не ограничивается выделением момента подхода тарелки к сердечнику и, соответственно, конца хода поршня, оно устанавливает взаимосвязь между значением индуктивности и положением, которое занимает поршень во время своего движения. Кроме того, согласно настоящему изобретению в зависимости от параметров настройки, введенных пользователем, принимается решение о том, в каком положении необходимо блокировать ход поршня. Предлагаемое изобретение позволяет контролировать с точностью до сотых долей ход поршня и, следовательно, производительность насоса для каждого отдельного впрыска добавки. В документе DE 202005013089 U раскрыт насос с электронным дозированием, в котором предусмотрена возможность контроля хода поршня для определения количества энергии, необходимого для надлежащей работы насоса. В указанном известном техническом решении регулирование хода поршня происходит посредством механической системы, причем заданный пользователем ход поршня контролируется с помощью оптического датчика, причем предусмотрена передача данных на электронную плату,которая включает электромагнит по сигналу управления, содержащему информацию об энергии, необходимой для работы, выполняемой насосом. В отличие от устройства, описанного в документе DE 202005013089 U, предлагаемое изобретение не ограничивается контролем подаваемого на электромагнит тока для предотвращения бесполезных потерь энергии так, что контроль хода поршня осуществляется механической системой, но включает соленоид посредством подачи на него тока точной величины, контролирует его перемещение путем вычисления импеданса и принимает решение о блокировке поршня в строго определенном положении, задание которого возможно путем калибровки электронной платы. Другими словами, в предлагаемом изобретении отсутствует механической контроль производительности насоса - все происходит под управлением электронной системы, которая включает электромагнит, отслеживает конец хода поршня и, следовательно, задает производительность насоса с точностью до сотых долей. В публикации WO 03/023226 описан электромагнитный дозирующий насос, предназначенный для введения медицинских препаратов в тело человека, причем указанный насос питается от аккумуляторной батареи и не подключен к электрической сети. Таким образом, техническое решение, описанное в указанном документе, относится к системе, обеспечивающей точное дозирование с минимальным потреблением электрической энергии, что важно для увеличения срока службы батареи. Из документа WO 03/023226 следует, что в момент времени, когда на насос поступает питание после срабатывания выключателя и подачи сигнала управления, конденсатор, выполняющий функции аккумулятора, заряжается за заданный промежуток времени и остается в указанном состоянии до тех пор,пока схема контроля не включит посредством сигнала управления и выключателя соленоид, задающий впрыск, осуществляемый насосом. Описанный принцип работы может показаться слишком простым,однако в действительности контроль зарядки и разрядки конденсатора в "интеллектуальном" режиме и потребление во время выполнения впрыска минимальной энергии, необходимой для надлежащей работы насоса, позволяет обеспечить значительную экономию энергии. В заключение необходимо отметить, что система, описанная в документе WO 03/023226, контролирует напряжение и процесс изменения тока для определения надлежащего количества энергии, подаваемой на соленоид. В отличие от устройства, описанного в WO 03/023226, предлагаемое изобретение основано на контроле хода поршня для мгновенного изменения объема впрыска насоса. Настоящее изобретение не сводится лишь к определению того, достигнут ли конец хода поршня, оно контролирует в реальном времени то, что происходит в электромагните, производит вычисление импеданса и определяет точный момент,когда следует остановить поршень. Одной из основных отличительных особенностей настоящего изобретения является то, что соленоид выполняет не только функцию привода, но также датчика системы. Задача настоящего изобретения заключается в устранении перечисленных выше недостатков путем разработки нового, современного дозирующего насоса, отличающегося низким потреблением энергии и высокой производительностью. В настоящем изобретении указанная задача решается за счет обеспечения нового принципа регулирования хода поршня (динамического изменения объема впрыска), основанного на управлении импедансом электромагнита, который представляет собой параметр, малочувствительный к внешним факторам,таким как рабочая температура, механический износ и напряжение источника питания. Разработчики описанного в настоящем изобретении дозирующего насоса рассчитывают на то, что он заменит существующее в настоящее время оборудование благодаря повышенной производительности и сниженной до минимума потребляемой энергии. Причем предлагаемый дозирующий насос обеспечивает точность дозирования, в основе чего лежит возможность регулирования хода поршня без использования механических устройств, подверженных износу, а путем измерения физических параметров, зависящих исключительно от геометрических параметров электромагнита. Настоящее изобретение станет более понятным при прочтении приведенного ниже подробного описания изобретения со ссылками на прилагаемые чертежи, на которых проиллюстрирован предпочти-3 024119 тельный вариант осуществления изобретения, не ограничивающий объем его защиты. На фиг. 1 А представлено осевое сечение предлагаемого дозирующего насоса с установленным на нем электромагнитом, а также представлен выносной элемент, в увеличенном виде иллюстрирующий воздушный зазор. На фиг. 1 В в увеличенном виде отдельно показан электромагнит насоса, представленного на фиг. 1 А. На фиг. 2-5 показаны соответствующие положения тарелки во время ее перемещения в направлении сердечника в случае, когда к обмотке приложена разность потенциалов; причем указанное перемещение называют "ходом поршня". При изменении длины хода поршня происходит изменение индуктивности электромагнита. Предлагаемый дозирующий насос, по существу, содержит три основных компонента, а именно электронную плату, электромагнит и насосную часть. Центральным компонентом системы является электромагнит, соответствующим образом управляемый электронной платой и возвращаемый в исходное положение под действием пружины. Указанный электромагнит приводит в действие поршень в импульсном режиме в диапазоне частот предпочтительно от 0 до 360 импульсов в минуту. Идея, лежащая в основе изобретения, состоит в постепенном воздействии на электромагнит малыми приращениями напряжения, причем одновременно с этим указанная электронная система измеряет ток,протекающий через соленоид, для получения соответствующего значения его импеданса, непосредственно связанного с положением поршня вдоль предусмотренного максимального хода поршня. Посредством потенциометрического или цифрового регулирования, непосредственно настраиваемого оператором через интерфейс электронной платы, можно с точностью до сотых долей задавать момент остановки поршня, то есть максимальный ход поршня. Таким образом, предлагаемый насос способен с очень высокой точностью варьировать количество впрыскиваемой добавки при каждом единичном включении электромагнита, при этом отсутствует необходимость в использовании специальных и дорогостоящих механических регуляторов или дополнительных датчиков и электронной обратной связи. В процессе работы описанного дозирующего насоса подвижная часть электромагнита 1, так называемая "тарелка" 2, движется до тех пор, пока не произойдет замыкание магнитного потока в сердечнике электромагнита, таким образом, обеспечивается перемещение поршня 3, прикрепленного к тарелке 2. Указанное перемещение, как было сказано выше, определяется как "ход поршня". С точки зрения электротехники упомянутый электромагнит представляет собой не что иное, как катушку индуктивности, образованную обмоткой, помещенной на ферромагнитном сердечнике определенной геометрической формы, причем в ней имеется воздушный зазор, закрывающийся при перемещении тарелки 2. Указанный воздушный зазор определяется расстоянием (L1, L2, L3, L4) между неподвижной и подвижной частями электромагнита и соответствует "ходу поршня". При этом подвижная часть (тарелка,прикрепленная к поршню) перемещается, вызывая изменение индуктивности вследствие изменения механических характеристик самой катушки индуктивности и, в частности, изменения физического параметра, известного в технической литературе под названием "магнитное сопротивление". С учетом вышесказанного можно установить определенную взаимосвязь между перемещением тарелки 2 и, следовательно, поршня 3 и изменением индуктивности в зависимости от указанного перемещения. Основанием для этого является то, что рассматриваемые параметры можно согласовать с типовыми параметрами катушек индуктивности, то есть с числом витков обмотки, поперечным сечением стального сердечника, длиной воздушного зазора и прочими параметрами и, следовательно, возможно их вычисление. Таким образом, предполагаемое изобретение основано на возможности установления связи между измерением индуктивности электромагнита 1-й, следовательно физического параметра, зависящего только и исключительно от геометрических характеристик изделия и конструктивных параметров, не подверженных любого рода отклонениям, и перемещением клапана 3. Известно, что импеданс электромагнита характеризуется резистивной составляющей, как правило,сопротивлением медной обмотки, индуктивной составляющей, обусловленной числом витков, и геометрией стального сердечника. Работа устройства будет характеризоваться измерением импеданса электромагнита Z = V/I при постоянном напряжении (V = constant) и измерением мгновенного тока (I) через каждую миллисекунду в течение заданного максимального времени, например, составляющего 100 мс и равного длительности типового импульса, подаваемого на электромагнит и рассчитанного, например, на получение перемещения, равного 1 мм. Таким образом, получаем сто значений мгновенного импеданса, соответствующих перемещению и соответственно измеряемых с точностью до сотых долей. Для сказанного выше формула, выражающая изменение тока с течением времени в выражении для импеданса, приведенном в предыдущем абзаце, с помощью которой можно представить эквивалентную электрическую схему электромагнита, имеет следующий вид: где R - активное сопротивление обмотки,L - индуктивность электромагнита (изменяющаяся во времени при перемещении тарелки),V - приложенное постоянное напряжение,е - число Непера, равное 2,7182. Сопротивление R остается практически постоянным, его незначительные изменения зависят от температуры, при этом в любом случае возможна его корректировка. Если необходимо отрегулировать ход поршня с очень высокой точностью, достаточно установить температурный датчик для коррекции сопротивления R электромагнита 1 и для более точного измерения импеданса. Таким образом, понятно, что изменение индуктивности L приводит к изменению тока и математически связано с конструктивными и геометрическими характеристиками электромагнита 1. Поэтому,выполнив простую выборку тока для каждого электромагнита при постоянном напряжении и измерив его импеданс только один раз и при первом включении, получаем возможность описания электромагнита, при этом выборочные значения будут повторяться при всех рабочих режимах электромагнита, показывая по изложенным выше причинам перемещение поршня 3 и тарелки 2, прикрепленной к поршню. Согласно настоящему изобретению на измерение импеданса не влияет ни давление в системе, к которой подключено устройство, ни изменения указанного давления. Это связано с тем, что сила, приложенная к электромагниту 1, не зависит от противодавления системы, а зависит от хода поршня, определяемого количеством впрыскиваемой жидкости. Путем измерения мгновенных значений импеданса можно также блокировать движение тарелки в определенных точках ее хода или же сохранять длительные импульсы перемещения с тем, чтобы облегчить выход выкачиваемой жидкости, увеличивая тем самым гидравлический КПД, особенно в случае обработки вязких жидкостей. Таким образом, каждый электромагнит будет характеризоваться своей таблицей, в которой значение импеданса будет связано с ходом поршня и регулироваться микроконтроллером. Одной из отличительных особенностей предлагаемого изобретения является то, что электромагнит 1 подсоединен к микроконтроллеру электронной платы. Указанный микроконтроллер обеспечивает возможность детектирования в реальном времени положения поршня 3 в зависимости от изменений импеданса электромагнита 1 и, следовательно, возможность регулирования в соответствии с поставленными требованиями хода указанного поршня 3 и, следовательно, количества жидкости, сразу же впрыскиваемой насосом. Чем больше ход поршня 3, тем выше производительность дозирующего насоса. Во время хода поршня 3, скрепленного с тарелкой 2, происходит изменение импеданса электромагнита 1, поскольку при изменении хода поршня происходит изменение магнитного сопротивления магнитной цепи электромагнита и, следовательно, его индуктивности. Исходя из этого, можно заключить,что в соответствии с настоящим изобретением ход поршня, как было указано выше, контролируется за счет контроля импедансом. В описанном варианте изобретения, приведенном лишь в качестве примера, при первом пуске устройства на этапе испытаний на заводе электронная плата подает первый импульс, в результате чего поршень 3 выполняет полный ход. Посредством измерений тока и напряжения в электромагните 1, выполняемых с интервалом 1 мс, указанная плата сохраняет во внутренней памяти соответствующие значения индуктивности и фактические значения хода поршня. Учитывая, что индуктивность является величиной, изменяющейся только при изменении некоторых физических и механических параметров, которые могут определять небольшие изменения хода поршня,очевидно, что могут потребоваться дополнительные калибровки насоса в течение его срока службы. Далее микроконтроллер принимает в качестве внешнего входного сигнала данные о заданном положении поршня, связанном с точным значением производительности наоса. Микроконтроллер управляет устройством питания, соединенным с электромагнитом, формируя импульсную последовательность,способную создавать прерывистое электромагнитное поле, обеспечивающее притяжение и отпускание тарелки 2, скрепленной с поршнем 3, который в свою очередь прикреплен к мембране 4 и перемещает ее внутри корпуса насоса. В результате, жидкая добавка закачивается в водный раствор. Каждый раз при перемещении поршня и, соответственно, тарелки происходит последовательное изменение импеданса электромагнита и, следовательно, детектируя указанное изменение, можно определить совершенный поршнем ход. Благодаря этому микроконтроллер получает возможность установить момент остановки поршня. После того как насос перенастроен так, чтобы его производительность удовлетворяла поставленным требованиям, электронная плата будет управлять током в зависимости от указанного запроса в допустимом диапазоне температуры внешней среды, характерной для надлежащей работы дозирующих насосов. Таким образом, удается избежать избыточного потребления энергии, то есть не происходит энергопотребления больше, чем действительно необходимо для работы дозирующего насоса. При этом производительность насоса остается неизменной в течение длительного времени, что оказывает положительное влияние на стабильность дозирования и срок службы оборудования. Дозирующий насос, оснащенный указанными средствами контроля, можно также подключать через последовательный порт к удаленному компьютеру, что позволяет управлять работой насоса. Первое преимущество использования описанного устройства заключается в возможности регулирования хода поршня 3 в зависимости от работы, которую должен эффективно выполнять дозирующий насос, и соответственно от количества впрыскиваемой им жидкости. Благодаря этому достигается не только экономия электроэнергии, которая в данном случае ограничивается количеством, действительно необходимым для работы насоса, но также обеспечивается экономия для самого пользователя, поскольку точное дозирование, неизменное с течением времени, предотвращает бесполезный расход добавляемых веществ. Второе преимущество состоит в возможности точного (порядка сотых долей миллиметра) определения положения поршня 3 по ходу его движения с помощью электронной платы с микроконтроллером. Третье преимущество связано с тем, что обеспечена возможность настройки хода поршня 3 при программировании микроконтроллера. Отсюда соответственно вытекают дополнительное двойное преимущество: отсутствие необходимости в использовании средств для механической калибровки, необходимой для правильного задания хода поршня, и связанное с этим снижение затрат. При одной и той же конфигурации изделия возможно изготовление дозирующих насосов с различными техническими характеристиками. Еще одним дополнительным преимуществом изобретения является то, что дозирующий насос, содержащий описанный ранее электромагнит, работает при температурах ниже тех, при которых работает традиционный дозирующий насос. Таким образом, предотвращается чрезмерный нагрев. Это связано с тем, что ограничение хода поршня происходит не с помощью механических средств без уменьшения энергии, подаваемой в электромагнит, а только за счет ограничения подачи указанной энергии. Дополнительное преимущество дозирующего насоса обусловлено тем, что новая система обладает возможностью выполнения двух функций, определяемых следующим образом. 1. "Недогрузка" - выявление отсутствия жидкости или добавки внутри корпуса насоса в штатном режиме работы устройства; 2. "Перегрузка" - выявление возможных заторов или избыточного давления в линии подачи насоса в штатном режиме работы устройства. Выявление указанных ситуаций ("Недогрузка" и "Перегрузка") возможно благодаря тому, что соответствующий блок электронного устройства вычисляет положение поршня и скорость его перемещения. В случае возникновения ситуации "Недогрузка" отсутствие жидкости или добавки в корпусе насоса приводит к значительному увеличению скорости перемещения поршня, при этом микроконтроллер, контролируя изменение индуктивности в реальном времени, выявляет указанную ситуацию и в соответствии с параметрами настройки, введенными на этапе программирования, передает немедленно или через заданное число импульсов сигнал тревоги. В случае ситуации "Недогрузка" в системе может быть предусмотрена возможность повторной заливки, при которой происходит подача заданного числа впрысков в течение определенного и запрограммированного периода времени. Функция "Перегрузка" позволяет микроконтроллеру выявлять отсутствие процесса дозирования независимо от наличия соответствующих известных внешних устройств (например, датчика расхода). Закупорка в линии подачи насоса, частичная или полная, приводит к снижению скорости перемещения поршня, при этом указанное снижение скорости зависит от степени засорения. Электронная плата насоса получает указанные данные и по истечении заданного промежутка времени автоматически переходит в состояние тревоги, показывая состояние "Перегрузка". Следует отметить, что устройство, описанное в патенте IT 1343207, заявка на который была подана от имени настоящего заявителя под названием "Дозирующий насос, содержащий устройство для автоматического контроля потребляемой мощности", представляет собой дозирующий насос, который обеспечивает контроль хода поршня посредством выключателя и отключает питание обмотки при приближении поршня к концу хода. В результате, предотвращается бесполезный расход энергии. Кроме того, в патентной заявке RM 2009A000537, поданной в Италии настоящим заявителем под названием "Устройство контроля хода поршня дозирующего насоса", описан дозирующий насос, который оснащен емкостным датчиком, соединенным с электромагнитом, который не просто контролирует конец хода поршня, но мгновенно изменяет положение поршня в зависимости от расстояния между пластинами конденсатора, а также посредством контроля, осуществляемого электронной платой, определяет и устанавливает точную величину дозированной добавки. В отличие от упомянутых технических решений, предлагаемое изобретение основано на контроле положения поршня 3 в зависимости от результата измерения индуктивности электромагнита 1. В результате, отпадает необходимость в использовании выключателя конца перемещения и емкостного датчика. Другими словами, электромагнит 1, наряду с выполнением функции привода насоса, выполняет также функцию индуктивного датчика, благодаря чему возможно определение и управление положением поршня 3 и, соответственно, производительностью насоса. И наконец, известно, что другие изготовители электронных дозирующих насосов пытались достичь этой цели путем контроля тока, протекающего через электромагнит, но полученные ими результаты не обеспечивали надлежащей и отвечающей требованиям работы насоса. Выше описан и проиллюстрирован предпочтительный вариант осуществления настоящего изобретения. Однако очевидно, что специалист в области техники может внести в описанный вариант изобретения различные модификации и/или изменения, не выходящие за рамки объема его защиты. Например,можно предусмотреть в электромагните обмотки и сердечники соответствующих размеров, имеющие геометрию и конструкцию, позволяющие получить минимальное рассеяние магнитного поля и повысить КПД и снизить тепловые потери. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Дозирующий насос с поршнем (3), содержащий электромагнит (1) с обмоткой и электронную плату с микроконтроллером,отличающийся тем, что для контроля хода поршня (3) электромагнит (1) снабжен неподвижной тарелкой и подвижной тарелкой (2), закрепленной относительно указанного поршня (3) так, что каждому перемещению поршня (3) соответствует разное расстояние между указанными тарелками и, соответственно, разное значение импеданса самого электромагнита(1); электромагнит (1) соединен с указанной электронной платой с микроконтроллером дозирующего насоса; указанная электронная плата с микроконтроллером выполнена с возможностью детектирования в реальном времени положения поршня (3) путем контроля изменений значения импеданса (Z) электромагнита (1), вызванных изменениями индуктивности; причем Z=V/I при постоянном напряжении (V =constant), а формула, выражающая изменение тока для указанного импеданса, с помощью которой можно представить эквивалентную электрическую схему электромагнита (1), имеет следующий вид: где R - активное сопротивление обмотки;L - индуктивность электромагнита, изменяющаяся во времени при перемещении тарелки (2) и, соответственно, поршня (3), прикрепленного к указанной тарелке;V - приложенное постоянное напряжение; е - число Непера, равное 2,7182. 2. Дозирующий насос по п.1, отличающийся тем, что поршень (3) прикреплен к мембране (4), расположенной в корпусе (5) насоса, и подвижная тарелка (2) выполнена с возможностью перемещения мембраны (4) внутри корпуса (5) насоса, с обеспечением тем самым закачивания жидкой добавки в систему, в которой установлен насос, при подаче на электромагнит (1) импульсной последовательности,создающей прерывистое магнитное поле, обеспечивающее притяжение и отпускание подвижной тарелки(2) с поршнем (3); при этом микроконтроллер конфигурирован для сохранения в своей памяти точного значения хода поршня, соответствующего значению индуктивности, детектированному микроконтроллером. 3. Дозирующий насос по п.1, отличающийся тем, что электронная плата выполнена с возможностью посылать первый импульс для измерения индуктивности при первом включении насоса для установления соотношения между ходом поршня и индуктивностью электромагнита; причем первый импульс конфигурирован для побуждения поршня (3) к совершению полного хода и микроконтроллер выполнен с возможностью измерять ток в электромагните (1) с интервалами в одну миллисекунду, сохраняя в своей внутренней памяти измеренные значения тока и хода поршня, с одновременным вычислением импеданса электромагнита. 4. Дозирующий насос по п.1, отличающийся тем, что микроконтроллер выполнен с возможностью регулирования хода поршня (3) путем модуляции импульсного тока при фиксированной частоте в электромагните на основании детектированных значений индуктивности, сравниваемых со значениями,имеющимися во внутренней памяти микроконтроллера, связывающего их с ходом поршня. 5. Дозирующий насос по п.1, отличающийся тем, что микроконтроллер выполнен с возможностью регулирования хода поршня (3) путем модуляции тока, необходимого электромагниту (1) для перемещения поршня (3). 6. Дозирующий насос по п.1, отличающийся тем, что микроконтроллер выполнен с возможностью проверки и оценки скорости перемещения поршня (3) для выявления состояния "Недогрузка", то есть для детектирования отсутствия добавки внутри корпуса насоса в штатном режиме работы насоса. 7. Дозирующий насос по п.1, отличающийся тем, что микроконтроллер выполнен с возможностью проверки и оценки скорости перемещения поршня (3) для выявления состояния "Перегрузка", то есть для выявления возможной закупорки или избыточного давления в линии подачи насоса в штатном режиме работы насоса. 8. Дозирующий насос по п.1, отличающийся тем, что электронная плата с микроконтроллером дополнительно выполнена с возможностью установки взаимосвязи между значением индуктивности и положением, занимаемым поршнем (3) во время своего хода, и определения на основе заданных пользова-7 024119 телем параметров настройки, в каком положении необходимо блокировать ход поршня с точностью до сотых долей. 9. Дозирующий насос по п.1, отличающийся тем, что электронная плата с микроконтроллером выполнена с возможностью контроля подаваемого на электромагнит (1) тока для предотвращения бесполезных потерь энергии и включения его соленоида путем подачи тока точной величины, контролируя перемещение поршня путем вычисления импеданса и принятия решения о блокировке поршня в точно определенном положении, которое можно задать путем калибровки электронной платы без использования механической системы для контроля производительности насоса. 10. Дозирующий насос по п.1, отличающийся тем, что для контроля хода поршня (3) так, чтобы обеспечить мгновенное изменение объема впрыска дозирующего насоса, электронная плата с микроконтроллером выполнена с возможностью определения, достигнут ли предварительно заданный конец хода поршня, и контроля в реальном времени того, что происходит в электромагните (1) путем вычисления импеданса и определения точного момента, когда следует остановить поршень (3). 11. Дозирующий насос по п.10, отличающийся тем, что он дополнительно содержит последовательный порт для подсоединения к компьютеру или другому подобному электронному устройству для дистанционного сбора информации, накопленной микроконтроллером, и/или для вмешательства в работу насоса. 12. Дозирующий насос по п.11, отличающийся тем, что электромагнит (1) выполнен с возможностью, при соответствующем включении его посредством электронной платы и возвращении в исходное состояние посредством пружины, приведения в действие поршня (3) в импульсном режиме в предпочтительном диапазоне частот от 0 до 360 импульсов в минуту. 13. Дозирующий насос по п.12, причем электронная плата выполнена с возможностью постепенного включения электромагнита (1) малыми приращениями напряжения и одновременного измерения тока,протекающего через соленоид указанного электромагнита, для получения соответствующего значения импеданса, непосредственно связанного с положением поршня (3) вдоль предусмотренного максимального хода поршня; причем электронная плата дополнительно выполнена с возможностью с точностью до сотых долей задавать точный момент остановки поршня, то есть его максимальный ход, путем потенциометрического или цифрового регулирования, непосредственно настраиваемого оператором через интерфейс электронной платы, с обеспечением возможности варьировать с высокой точностью количество впрыскиваемой добавки при каждом единичном включении электромагнита.
МПК / Метки
МПК: F04B 13/00
Метки: дозирующий, насос
Код ссылки
<a href="https://eas.patents.su/12-24119-doziruyushhijj-nasos.html" rel="bookmark" title="База патентов Евразийского Союза">Дозирующий насос</a>
Дозирующий жидкостной насос и устройство для определения изменения давления для такого насоса
Номер патента: 22129
Опубликовано: 30.11.2015
Авторы: Шаррьер Кристоф, Люка Грегори, Ваше Давид
МПК: F04B 13/02, F04B 9/105, F04B 49/02...
Метки: насос, насоса, жидкостной, устройство, изменения, дозирующий, такого, давления, определения
Формула / Реферат:
1. Дозирующий жидкостной насос, содержащий всасывающий патрубок, снабженный всасывающим клапаном, сообщающимся с рабочей камерой, в которой может возвратно-поступательно перемещаться поршень, при этом всасывание происходит при открывании всасывающего клапана, когда поршень отдаляется от патрубка, а нагнетание - при закрывании всасывающего клапана и выходе жидкости через выходной клапан, когда поршень приближается к патрубку, отличающийся тем,...
Ручной насос
Номер патента: 152
Опубликовано: 29.10.1998
Авторы: Творогов Александр Григорьевич, Ганин Фёдор Гаврилович
МПК: F04B 9/14
Формула / Реферат:
Ручной насос, содержащий корпус (1) с всасывающим (2) и нагнетательным (3) клапанами, телескопически сопряженные между собой поршень (5) и плунжер (7), размещенные в корпусе, устройство для ограничения хода поршня (4), устройство для фиксации поршня (8), рукоятку с рычагом (10) и двухосную серьгу (12), отличающийся тем, что устройство для фиксации поршня выполнено в виде П-образного рычага (8), установленного на одной оси (9) с плунжером (7) и...
Насос, в частности шламовый насос
Номер патента: 10914
Опубликовано: 30.12.2008
Автор: Юнг Херберт
МПК: F04C 2/22, F04C 13/00
Метки: частности, шламовый, насос
Формула / Реферат:
1. Шламовый насос, содержащий приводимый во вращение в корпусе (2) ротор (4), причем ротор (4) выполнен в виде многоугольного призматического тела, у которого, по меньшей мере, соединительные прямые углов оснований образуют равносторонний многоугольник, с возможностью совершения вращательного движения вокруг своей движущейся по круговой траектории центральной оси, причем продольные грани призматического тела (4') касаются продольной внутренней...
Насос высокого давления
Номер патента: 13698
Опубликовано: 30.06.2010
Авторы: Безрядин Виктор Александрович, Красников Сергей Михайлович, Аверин Константин Михайлович
МПК: F04B 9/04
Метки: насос, давления, высокого
Формула / Реферат:
1. Насос высокого давления, содержащий привод, преобразующий вращательное движение вала в возвратно-поступательное движение плунжера насоса, отличающийся тем, что привод насоса выполнен в виде динамически уравновешенного планетарного привода, содержащего неподвижную и подвижные шестерни, на одной из которых установлен палец-толкатель с роликом, ось которого является продолжением образующей цилиндра длительной окружности шестерни и который...
Поршневой насос
Номер патента: 7695
Опубликовано: 29.12.2006
Автор: Винигер Герхард
Формула / Реферат:
1. Поршневой насос с корпусом (1, 2, 3), поршнем (4) двустороннего действия, ограничивающим в цилиндре (5) насоса посредством перемещений рабочую полость (а), и принудительным управлением клапанами для закрывания всасывающей и нагнетающей линий, отличающийся тем, что его корпус (1) имеет расположенные параллельно цилиндру (5) две расточки (b, с), которые за счет поперечных расточек служат соответственно в качестве всасывающей и нагнетательной...
Предыдущий патент: Конъюгаты пирролбензодиазепина направленного действия
Следующий патент: Обратно-эмульсионные буровые растворы и способы бурения скважин
Случайный патент: Способ полимеризации олефинов в присутствии катализатора полимеризации олефина