Подвеска транспортного средства и транспортное средство с такой подвеской
Номер патента: 23993
Опубликовано: 31.08.2016
Авторы: Ахуджа Мунишвар, Кальяни Амит Раджшекар, Дхури Кришнарао Даттарам, Тамбе Нихил Субхашчандра, Кумар Рави, Кумар Анубхав
Формула / Реферат
1. Подвеска (142) транспортного средства, содержащая
пружины (132);
держатели (140) пружин (132), выполненные с возможностью регулировки количества неактивных витков (138) указанных пружин (132) для изменения жесткости пружин;
двигатель (180), соединенный с указанными держателями (140) пружин и выполненный с возможностью приведения в действие держателей (140) пружин для регулировки количества неактивных витков (138) указанных пружин (132);
контроллер (114), соединенный с двигателем (180) и предназначенный для управления двигателем для приведения в действие держателей (140) пружин для регулировки количества неактивных витков (138) указанных пружин (132).
2. Подвеска по п.1, в которой контроллер (114) выполнен с возможностью динамического управления двигателем (180) для приведения в действие держателей пружин для регулировки количества неактивных витков указанных пружин на основе рабочих условий.
3. Подвеска по п.1, в которой указанные держатели (140) пружин (132) выполнены с возможностью блокировки большего или меньшего количества витков (138) указанных пружин (132) для регулирования количества неактивных витков.
4. Подвеска по п.3, в которой один конец (168) указанных пружин (132) закреплен, а противоположный конец является подвижным, причем указанные держатели (140) взаимодействуют с подвижными концами пружин (132).
5. Подвеска по п.4, в которой держатель пружины (132) выполнен в виде поворотного элемента (160), снабженного внутренней резьбой (166) и имеющего открытый конец для размещения в нем подвижного конца пружины (132) с обеспечением сцепления внутренней резьбы (166) держателя с витками (138) указанного конца пружины (132) и изменения количества витков, удерживаемых резьбой (166) держателя, при его повороте, а двигатель (180) соединен с держателем (160) с обеспечением возможности его поворота.
6. Подвеска по п.5, в которой конец держателя (160), противоположный его открытому концу, выполнен закрытым для ограничения максимального количества блокируемых витков (138).
7. Подвеска по п.3, в которой держатель пружины (132) выполнен в виде поворотного болта (170) с наружной резьбой (172), установленного внутри пружины (132) с обеспечением сцепления указанной резьбы (172) с витками (138) подвижного конца пружины (132) и изменения количества витков, удерживаемых резьбой (172) болта, при его повороте, а двигатель (180) соединен с болтом (170) с обеспечением возможности его поворота.
8. Подвеска по п.7, в которой наружная резьба (172) выполнена лишь вдоль части болта (170) с резьбой.
9. Транспортное средство, содержащее раму, на которой размещены несколько осей, каждая из которых соединена с рамой посредством соответствующей ей пружинной подвески, по меньшей мере одна из которых выполнена в виде подвески (142) по любому из пп.1-8, при этом по меньшей мере одна из указанных осей соединена с тяговым двигателем (110) транспортного средства.
10. Транспортное средство по п.9, в котором указанные оси включают крайние оси и расположенную между ними промежуточную ось, причем только подвеска промежуточной оси выполнена в виде подвески (142) по любому из пп.1-8.
11. Транспортное средство по п.10, в котором тяговые двигатели (110) соединены только с крайними осями, а держатели (140) пружин (132) изменяют жесткость указанных пружин (132) для перераспределения нагрузки с промежуточной оси на крайние оси.

Текст
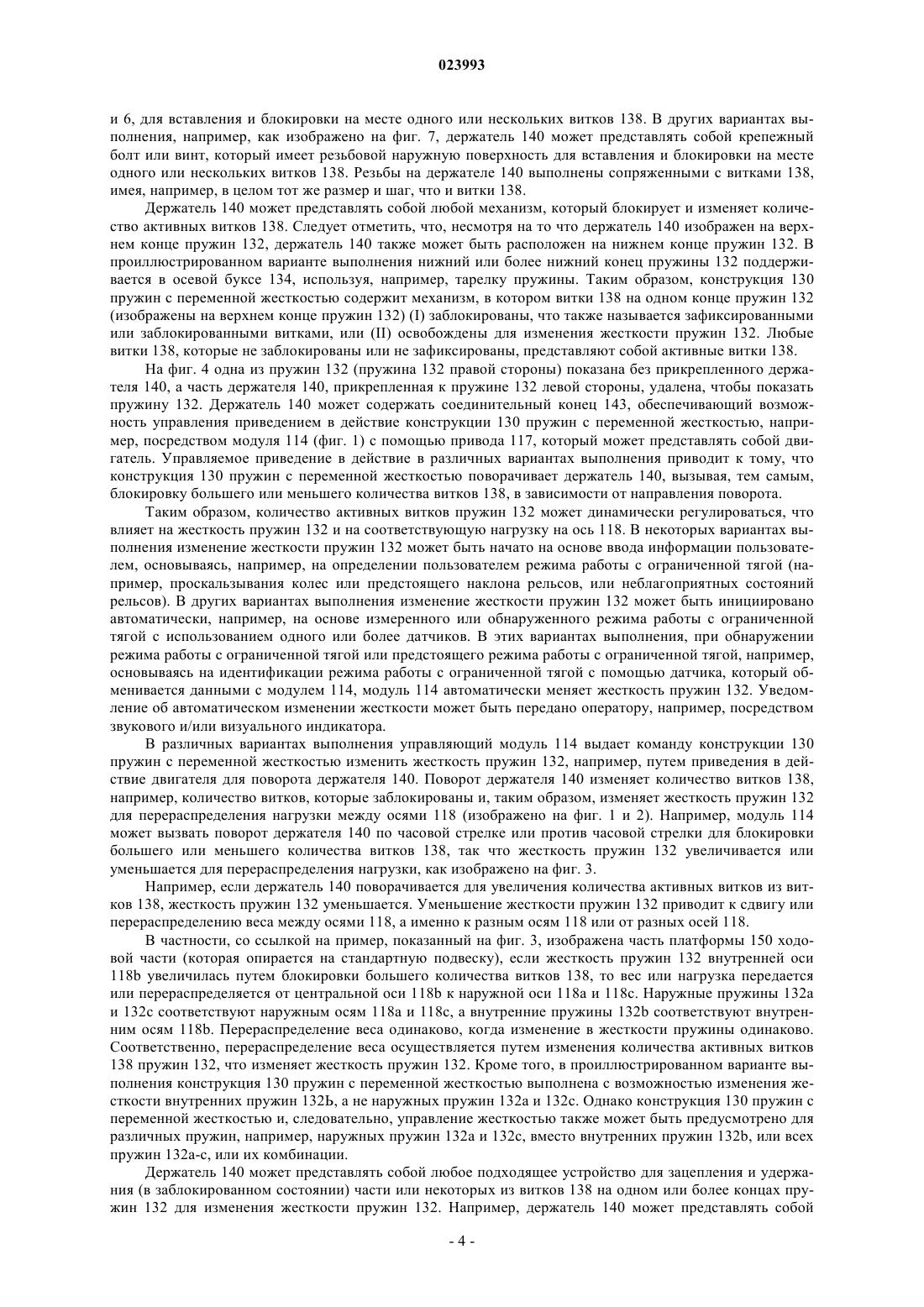
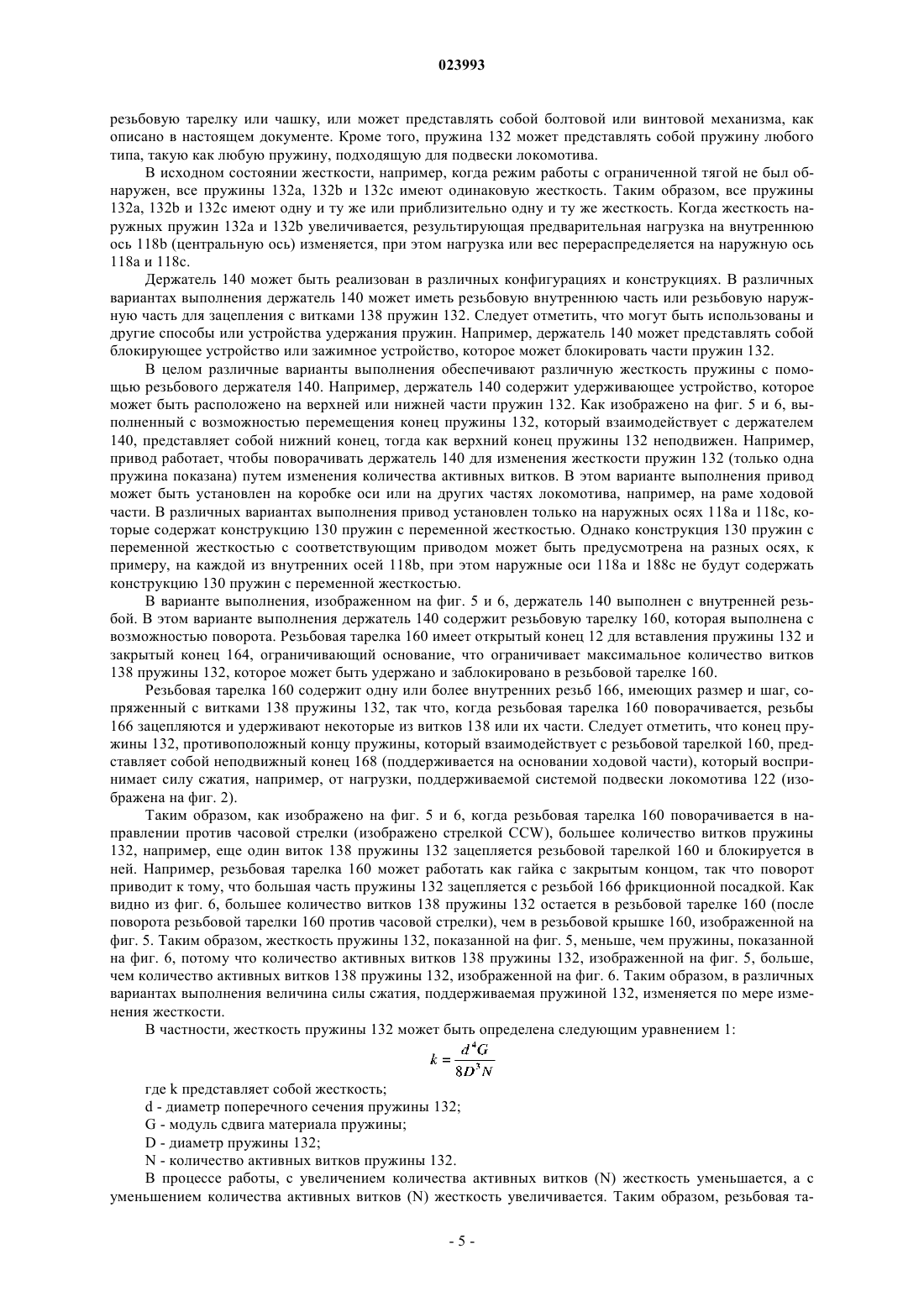
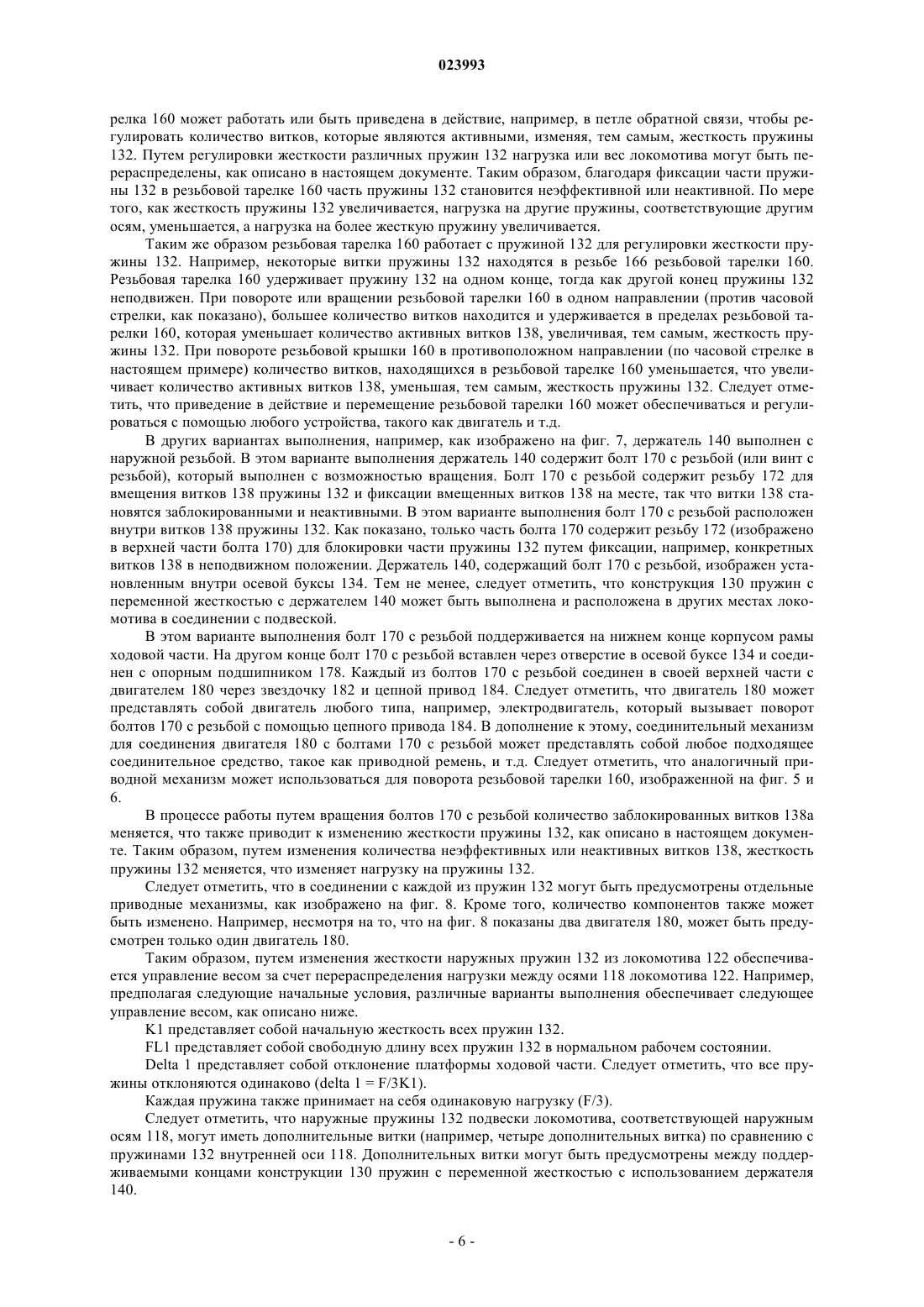
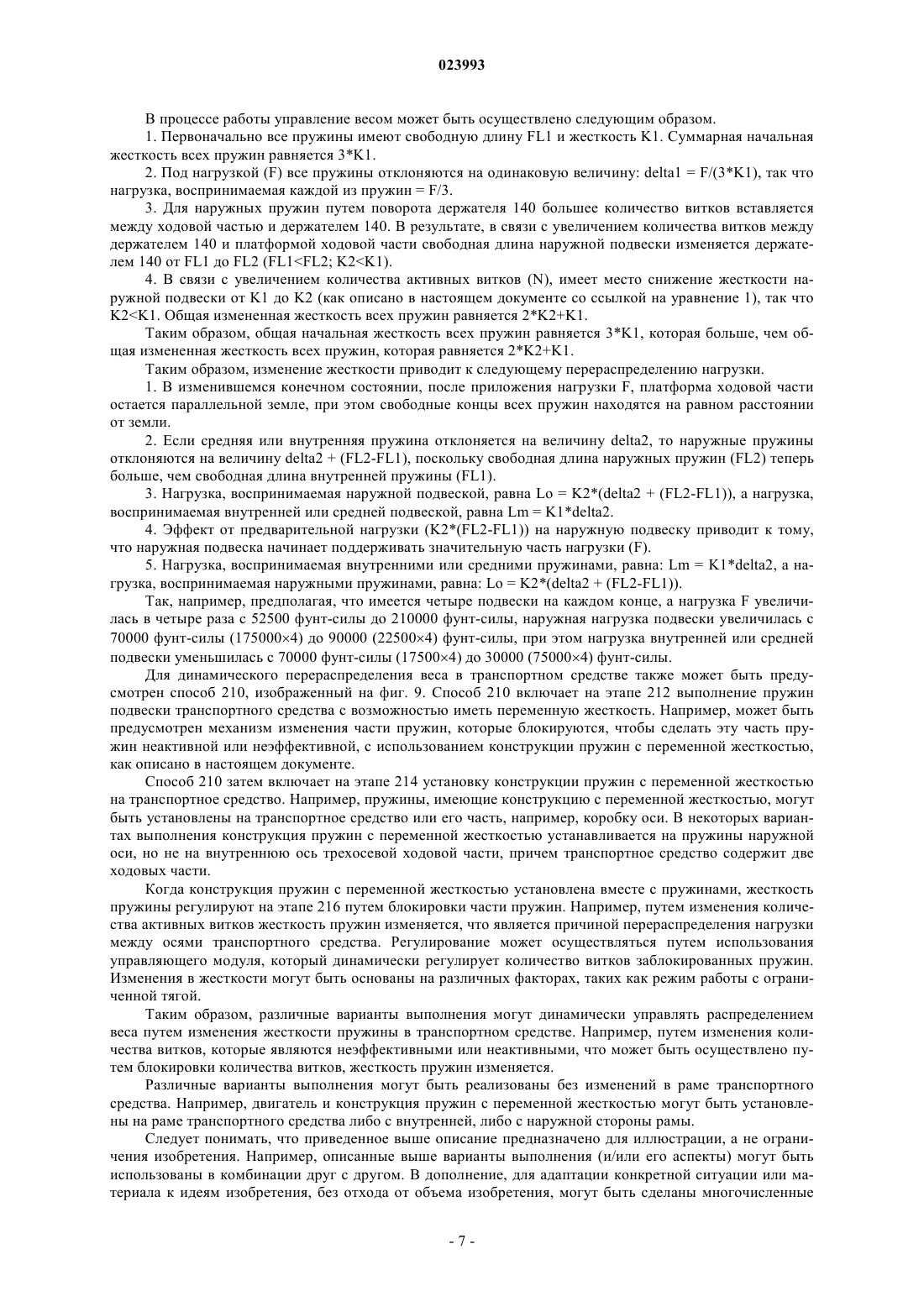
ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО С ТАКОЙ ПОДВЕСКОЙ Для управления весом в транспортном средстве подвеска (142) транспортного средства содержит пружины (132), держатели (140) пружин (132), выполненные с возможностью регулировки количества неактивных витков (138) указанных пружин (132) для изменения жесткости пружин. С указанными держателями (140) пружин соединен двигатель (180), выполненный с возможностью приведения в действие держателей (140) пружин для регулировки количества неактивных витков(138) указанных пружин (132). Контроллер (114), соединенный с двигателем (180), предназначен для управления двигателем для приведения в действие держателей (140) пружин для регулировки количества неактивных витков (138) указанных пружин (132). Предпосылки изобретения Транспортные средства, такие как дизель-электрические локомотивы, могут быть выполнены с ходовыми узлами, включающими две ходовые части на узел и, например, три оси на ходовую часть. Три оси могут включать по меньшей мере одну ведущую ось и по меньшей мере одну не ведущую ось. Оси могут быть установлены на ходовую часть с помощью подъемных механизмов, таких как сборки подвески, содержащей одну или более пружин, для регулировки распределения веса локомотива (включая вес корпуса локомотива и вес ходовой части локомотива) между осями. Когда транспортное средство перемещается по рельсам, величина нагрузки, действующей на каждую из осей ходовой части, может меняться, причем каждая ось также имеет максимальный вес нагрузки. В определенных условиях, например во время ненастной погоды, надлежащее сцепление с железнодорожным полотном может быть потеряно, в результате чего одно или более колес проскальзывают. Соответственно, тяговое усилие для этих транспортных средств может быть менее оптимального. Например, тяговое усилие может повлиять на поезда, особенно для тяжелых поездов и буксиров, во время трогания с места, на подъеме, и при неблагоприятных состояниях рельсов, таких как вызванных ненастной погодой или другими условиями окружающей среды. В известных системах рельсовых транспортных средств пружины подвески для ходовых частей являются предварительно нагруженными. Например, каждая из пружин предварительно нагружена в зависимости от нормальной величины веса, который должен поддерживаться системой подвески для осей. В результате, при определенных условиях, предварительно нагруженные пружины не могут обеспечить достаточную нормальную силу для поддержания должного контакта между колесами ходовой части и железнодорожным полотном, особенно, в ненастную погоду или при неблагоприятных состояниях рельсов. Сущность изобретения В соответствии с различными вариантами выполнения системы и способы обеспечивают переменную жесткость пружины для регулирования веса в транспортном средстве. Один вариант выполнения содержит пружины и держатели пружин, выполненные с возможностью регулировки количества неработающих витков указанных пружин. Кроме того, предусмотрен двигатель, соединенный с указанными держателями пружин и выполненный с возможностью приведения в действие держателей пружин для регулировки количества неработающих витков указанных пружин. Более того, также предусмотрен контроллер, соединенный с двигателем для регулирования двигателя для приведения в действие держателей пружин для регулировки количества неработающих витков указанных пружин. Краткое описание чертежей Настоящее изобретение будет лучше всего понятно из нижеследующего описания не ограничивающих вариантов выполнения, со ссылками на прилагаемые чертежи, на которых: фиг. 1 представляет собой схематическую диаграмму приводного транспортного средства, выполненного в соответствии с одним вариантом выполнения; фиг. 2 представляет собой вид сбоку транспортного средства, имеющего ходовые части с подвесками с переменной жесткостью пружин, в соответствии с различными вариантами выполнения; фиг. 3 представляет собой схематическую диаграмму, иллюстрирующую перераспределение нагрузки с использованием пружин, в соответствии с различными вариантами выполнения; фиг. 4 представляет собой схематическую диаграмму, показывающую конструкцию пружины с переменной жесткостью, выполненной в соответствии с различными вариантами выполнения; фиг. 5 представляет собой вид в аксонометрии пружины, выполненной в соответствии с различными вариантами выполнения; фиг. 6 представляет собой другой вид в аксонометрии держателя пружины, выполненного в соответствии с различными вариантами выполнения и имеющую другую жесткость; фиг. 7 представляет собой вид в поперечном разрезе другого держателя пружины, выполненного в соответствии с различными вариантами выполнения, внутри подвески транспортного средства; фиг. 8 представляет собой вид в поперечном разрезе другого держателя пружины, выполненного в соответствии с различными вариантами выполнения, внутри подвески транспортного средства; фиг. 9 представляет собой блок-схему способа динамического перераспределения веса в транспортном средстве, в соответствии с различными вариантами выполнения. Подробное описание изобретения В той степени, в которой чертежи иллюстрируют диаграммы функциональных узлов различных вариантов выполнения, функциональные блоки не обязательно свидетельствуют о разделении между компонентами. Так, например, один или несколько функциональных узлов могут быть реализованы в одном оборудовании или в нескольких оборудованиях. Следует понимать, что различные варианты выполнения не ограничиваются устройствами и техническими средствами, представленными на чертежах. Как используется в настоящем документе, элемент или этап, представленный в единственном числе, следует понимать как не исключающий возможности множественного числа указанных элементов или этапов, если такое исключение специально не оговорено. Кроме того, ссылки на "один вариант выполнения" настоящего изобретения не должны толковаться как исключающие наличие дополнительных вариантов выполнения, которые также включают заявленные признаки. Кроме того, если явно не указано иное, варианты выполнения, "содержащие" или "имеющие" элемент или несколько элементов с определенными свойствами, могут содержать такие дополнительные элементы, не имеющие этого свойства. Следует отметить, что, хотя один или несколько вариантов выполнения могут быть описаны в связи с приводными системами рельсовых транспортных средств, имеющих локомотивы со следующими сзади пассажирскими или грузовыми вагонами, варианты выполнения, описанные в настоящем документе, не ограничиваются исключительно поездами. В частности, один или несколько вариантов выполнения могут быть реализованы в связи с различными типами транспортных средств, включая колесные транспортные средства, другие рельсовые транспортные средства, а также гусеничные транспортные средства. В настоящем документе представлены иллюстративные варианты выполнения одного или нескольких устройств и способов для управления весом транспортного средства. Различные варианты выполнения обеспечивают динамическое управление весом транспортного средства, которое включает изменение нагрузки между осями, для перераспределения нагрузки на оси ходовой части в системе транспортного средства. Как описано ниже, один или несколько из этих вариантов выполнения обеспечивает динамическое управление весом транспортного средства, которое перераспределяет силы реакции между осями транспортного средства, например, от середины/центра внутренней оси к наружным осям, путем изменения жесткости одной или более пружин подвески транспортного средства. Например, в некоторых вариантах выполнения для изменения количества активных витков пружины используется выключающий механизм, путем блокировки одного или более (или части его) витков пружин. Как используется в настоящем документе, когда ссылка делается на блокировку одного или более витков, это в целом относится к созданию указанного одного или более витков пружины неработающим или неэффективным. Например, блокировка одного или более витков включает фиксацию или остановку перемещения иным образом, или сжатие одного или более витков или части пружин, например, путем фиксации указанного одного или более витков на месте. Путем реализации на практике различных вариантов выполнения достигается по меньшей мере один технический результат, заключающийся в увеличении тяги, действующей на приводные осей, что может способствовать тяговому усилию в течение конкретных режимов работы с ограниченной тягой. Более того, путем реализации на практике различных вариантов выполнения, для создания такого же количества тягового усилия или силы может быть использовано меньшее количество тяговых двигателей. Например, для ходовой части с шестью осями тяговые двигатели могут быть выполнены на лишь четырех осях, а не на всех шести осях. Кроме того, перенос веса между осями в соответствии с различными вариантами выполнения обеспечивает улучшенный контакт и сцепление между рельсом и колесом,что обеспечивает возможность перевозки ходовой частью транспортного средства тяжелых грузов, например перевозки груза с меньшим количеством тяговых двигателей. Фиг. 1 представляет собой схематическое изображение приводного рельсового транспортного средства 100, выполненного в соответствии с одним вариантом выполнения, показанного как система локомотива, в которой передача силы реакции между осями может быть осуществлена путем изменения жесткости одной или более пружин подвески системы локомотива. Например, как более подробно описано в настоящем документе и было отмечено выше, для блокировки и изменения количества активных витков пружинной подвески может быть использован держатель пружины, чтобы изменять жесткость пружин подвески. Несмотря на то что один вариант выполнения описанного в настоящем документе предмета изобретения изложен в терминах приводного рельсового транспортного средства, в качестве альтернативы предмет изобретения может быть использован с транспортным средством другого типа, как описано в настоящем документе. Рельсовое транспортное средство 100 содержит ведущий приводной узел 102, соединенный с несколькими ведомыми узлами 104, которые перемещаются по одной или более рельсам 106. В одном варианте выполнения ведущий приводной узел 102 представляет собой локомотив, расположенный в передней части рельсового транспортного средства 100, а ведомые узлы 104 представляют собой грузовые вагоны для перевозки пассажиров и/или других грузов. Ведущий приводной узел 102 содержит двигательную систему, например систему 116 дизельного двигателя. Система 116 дизельного двигателя соединена с тяговыми двигателями 110, которые обеспечивают тяговое усилие для приведения в движение рельсового транспортного средства 100. Например, система 116 дизельного двигателя содержит дизельный двигатель 108, который приводит в действие тяговые двигатели 110, соединенные с колесами 112 рельсового транспортного средства 100. Дизельный двигатель 108 может вращать вал, который соединен с генератором переменного тока или генератором (не показан). Генератор переменного тока или генератор генерирует электрический ток, основываясь на вращении вала. Электрический ток подается на тяговые двигатели 110, которые поворачивают колеса 112 и приводят в движение рельсовое транспортное средство 100. Следует отметить, что для простоты и удобства иллюстрации, тяговые двигатели 110 изображены только в связи с одним комплектом колес 112. Тем не менее, тяговые двигатели 110 могут быть предусмотрены в связи с другими колесами 112 или комплектом колес 112, как описано в настоящем документе. Рельсовое транспортное средство 100 содержит контроллер, такой как управляющий модуль 114,-2 023993 который с возможностью сообщения соединен с тяговыми двигателями 110 и/или приводом 117 для регулирования жесткости пружин 132 системы 142 подвески (все это показано на фиг. 4). Например,управляющий модуль 114 может быть соединен с тяговыми двигателями 110 и/или приводом 117 с помощью одного или более проводных и/или беспроводных соединений. Управляющий модуль 114 работает в некоторых вариантах выполнения для управления и перераспределения нагрузки, поддерживаемой каждым из колес 112, и, в частности, каждой осью 118, путем изменения жесткости одного или более витков или части пружин 132, например, путем иммобилизации или блокировки одного или более витков 138 пружин 132 (изображено на фиг. 4). В различных вариантах выполнения динамическое управление весом может обеспечивать распределение нагрузки независимо для каждой из осей 118. Например, каждый из блоков 102 и 104 может содержать два комплекта колес 112, соответствующие двум ходовым частям 120 (показано более четко на фиг. 2). Как видно, каждая ходовая часть 120 содержит три оси 118, причем каждая из них имеет два колеса 112. В некоторых вариантах выполнения наружные оси 118 а и 118 с приводятся в действие тяговым двигателем 110, тогда как внутренняя ось 118b не приводится в действие тяговым двигателем 110. Соответственно, для конкретных блоков 102 или 104 тяговые двигатели 110 предусмотрены в связи с общим количеством четырех осей 118, вместо всех шести осей 118. Следует отметить, что количество тяговых двигателей 110, и то какие оси 118 соединены с тяговым двигателем 110, может быть модифицировано так, что могут быть получены различные конфигурации тягового усилия. Управляющий модуль 114 может содержать процессор, такой как компьютерный процессор, контроллер, микроконтроллер или другой тип логического устройства, которое работает на основе набора инструкций, хранящихся на материальном и постоянном машиночитаемом носителе. Машиночитаемый носитель может представлять собой электрически стираемую программируемую постоянную память(EEPROM), простое постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ПЗУ), стираемое программируемое постоянное запоминающее устройство (ПЗУ),флэш-память, жесткий диск, или другой тип памяти компьютера. Таким образом, как представлено локомотивом 122, изображенным на фиг. 2, управление весом,которое в различных вариантах выполнения включает передачу или перераспределение веса, может быть осуществлено, например, когда колеса 112 проскальзывают относительно рельса (например, железнодорожного полотна) 106. В соответствии с различными вариантами выполнения обеспечивается управление весом, так что вес внутренней или средней оси 118b перераспределяется на наружные оси 118 а и 118 с, о чем свидетельствуют большие стрелки, соответствующие наружным осям 118 а и 118 с, и меньшая стрелка, соответствующая внутренней оси 118, которые представляют собой изменение веса или нагрузки на каждую из осей 118 а-с. Увеличение веса на наружные оси 118 а и 118 с приводит к увеличению силы сцепления колес 112 осей 118 а и 118 с с рельсами (например, железнодорожным полотном) 106, что уменьшает величину проскальзывания колес, например, при режиме работы с ограниченной тягой. Таким образом, управляющий модуль 114 может обеспечивать динамическое перераспределение веса между осями 118 а-с. Следует отметить, что перераспределение веса может быть предусмотрено в связи с любым модулем системы рельсового транспортного средства. Перераспределение веса в некоторых вариантах выполнения включает перенос веса от внутренней оси 118b в равной степени к наружным осям 118 а и 118 с. Перераспределение веса осуществляется путем изменения или вариации жесткости пружин 132 в соединении с подвеской для одной или более осей 118 а-с. Например, в некоторых вариантах выполнения каждая ось 118 а-с имеет четыре пружины. Тем не менее, управление весом, включая перераспределение веса, достигается за счет изменения жесткости некоторых, но не всех пружин 132. Со ссылкой на фиг. 3 и 4, различные варианты выполнения перераспределяют вес между осями 118 а-с, например, путем изменения количества активных витков 138 для одной или более пружин 132 так, что изменяется жесткость пружин 132. Таким образом, жесткость пружин 132 изменяется так, что результатом является перераспределение нагрузки. Например, в одном варианте выполнения, как изображено на фиг. 4, показана конструкция 130 пружин с переменной жесткостью, формирующая часть системы 142 подвески. Следует отметить, что одинаковые номера позиций на чертежах обозначают одни и те же части. Конструкция 130 пружин с переменной жесткостью содержит механизм для изменения жесткости одной или нескольких пружин 132 системы 142 подвески ходовой части 120 (изображенной на фиг. 2), часть которой изображена на фиг. 3. Также предусмотрена осевая букса 134 (которая также может называться подшипниковой коробкой), имеющая отверстие 136 для вставления оси, такой как ось 118 а-с локомотива 122 (и то и другое изображено на фиг. 2), проходящей также через колеса 112. В проиллюстрированном варианте выполнения в соединении с каждой стороной оси предусмотрены две пружины 132 и, таким образом, в общей сложности, в соединении с подвеской для каждой оси 118 а-с предусмотрено четыре пружины 132. В одном варианте выполнения, как изображено на фиг. 4, механизм для изменения количества активных витков 138 пружин 132 и, тем самым, регулировки жесткости пружин 132, содержит держатель 140 пружины, который может быть выполнен разнообразными способами. Например, в некоторых вариантах выполнения держатель 140 может иметь резьбовую внутреннюю область, как изображено на фиг. 5 и 6, для вставления и блокировки на месте одного или нескольких витков 138. В других вариантах выполнения, например, как изображено на фиг. 7, держатель 140 может представлять собой крепежный болт или винт, который имеет резьбовой наружную поверхность для вставления и блокировки на месте одного или нескольких витков 138. Резьбы на держателе 140 выполнены сопряженными с витками 138,имея, например, в целом тот же размер и шаг, что и витки 138. Держатель 140 может представлять собой любой механизм, который блокирует и изменяет количество активных витков 138. Следует отметить, что, несмотря на то что держатель 140 изображен на верхнем конце пружин 132, держатель 140 также может быть расположен на нижнем конце пружин 132. В проиллюстрированном варианте выполнения нижний или более нижний конец пружины 132 поддерживается в осевой буксе 134, используя, например, тарелку пружины. Таким образом, конструкция 130 пружин с переменной жесткостью содержит механизм, в котором витки 138 на одном конце пружин 132(изображены на верхнем конце пружин 132) (I) заблокированы, что также называется зафиксированными или заблокированными витками, или (II) освобождены для изменения жесткости пружин 132. Любые витки 138, которые не заблокированы или не зафиксированы, представляют собой активные витки 138. На фиг. 4 одна из пружин 132 (пружина 132 правой стороны) показана без прикрепленного держателя 140, а часть держателя 140, прикрепленная к пружине 132 левой стороны, удалена, чтобы показать пружину 132. Держатель 140 может содержать соединительный конец 143, обеспечивающий возможность управления приведением в действие конструкции 130 пружин с переменной жесткостью, например, посредством модуля 114 (фиг. 1) с помощью привода 117, который может представлять собой двигатель. Управляемое приведение в действие в различных вариантах выполнения приводит к тому, что конструкция 130 пружин с переменной жесткостью поворачивает держатель 140, вызывая, тем самым,блокировку большего или меньшего количества витков 138, в зависимости от направления поворота. Таким образом, количество активных витков пружин 132 может динамически регулироваться, что влияет на жесткость пружин 132 и на соответствующую нагрузку на ось 118. В некоторых вариантах выполнения изменение жесткости пружин 132 может быть начато на основе ввода информации пользователем, основываясь, например, на определении пользователем режима работы с ограниченной тягой (например, проскальзывания колес или предстоящего наклона рельсов, или неблагоприятных состояний рельсов). В других вариантах выполнения изменение жесткости пружин 132 может быть инициировано автоматически, например, на основе измеренного или обнаруженного режима работы с ограниченной тягой с использованием одного или более датчиков. В этих вариантах выполнения, при обнаружении режима работы с ограниченной тягой или предстоящего режима работы с ограниченной тягой, например,основываясь на идентификации режима работы с ограниченной тягой с помощью датчика, который обменивается данными с модулем 114, модуль 114 автоматически меняет жесткость пружин 132. Уведомление об автоматическом изменении жесткости может быть передано оператору, например, посредством звукового и/или визуального индикатора. В различных вариантах выполнения управляющий модуль 114 выдает команду конструкции 130 пружин с переменной жесткостью изменить жесткость пружин 132, например, путем приведения в действие двигателя для поворота держателя 140. Поворот держателя 140 изменяет количество витков 138,например, количество витков, которые заблокированы и, таким образом, изменяет жесткость пружин 132 для перераспределения нагрузки между осями 118 (изображено на фиг. 1 и 2). Например, модуль 114 может вызвать поворот держателя 140 по часовой стрелке или против часовой стрелки для блокировки большего или меньшего количества витков 138, так что жесткость пружин 132 увеличивается или уменьшается для перераспределения нагрузки, как изображено на фиг. 3. Например, если держатель 140 поворачивается для увеличения количества активных витков из витков 138, жесткость пружин 132 уменьшается. Уменьшение жесткости пружин 132 приводит к сдвигу или перераспределению веса между осями 118, а именно к разным осям 118 или от разных осей 118. В частности, со ссылкой на пример, показанный на фиг. 3, изображена часть платформы 150 ходовой части (которая опирается на стандартную подвеску), если жесткость пружин 132 внутренней оси 118b увеличилась путем блокировки большего количества витков 138, то вес или нагрузка передается или перераспределяется от центральной оси 118b к наружной оси 118 а и 118 с. Наружные пружины 132 а и 132 с соответствуют наружным осям 118 а и 118 с, а внутренние пружины 132b соответствуют внутренним осям 118b. Перераспределение веса одинаково, когда изменение в жесткости пружины одинаково. Соответственно, перераспределение веса осуществляется путем изменения количества активных витков 138 пружин 132, что изменяет жесткость пружин 132. Кроме того, в проиллюстрированном варианте выполнения конструкция 130 пружин с переменной жесткостью выполнена с возможностью изменения жесткости внутренних пружин 132 Ь, а не наружных пружин 132 а и 132 с. Однако конструкция 130 пружин с переменной жесткостью и, следовательно, управление жесткостью также может быть предусмотрено для различных пружин, например, наружных пружин 132 а и 132 с, вместо внутренних пружин 132b, или всех пружин 132 а-с, или их комбинации. Держатель 140 может представлять собой любое подходящее устройство для зацепления и удержания (в заблокированном состоянии) части или некоторых из витков 138 на одном или более концах пружин 132 для изменения жесткости пружин 132. Например, держатель 140 может представлять собой резьбовую тарелку или чашку, или может представлять собой болтовой или винтовой механизма, как описано в настоящем документе. Кроме того, пружина 132 может представлять собой пружину любого типа, такую как любую пружину, подходящую для подвески локомотива. В исходном состоянии жесткости, например, когда режим работы с ограниченной тягой не был обнаружен, все пружины 132 а, 132b и 132 с имеют одинаковую жесткость. Таким образом, все пружины 132 а, 132b и 132 с имеют одну и ту же или приблизительно одну и ту же жесткость. Когда жесткость наружных пружин 132 а и 132b увеличивается, результирующая предварительная нагрузка на внутреннюю ось 118b (центральную ось) изменяется, при этом нагрузка или вес перераспределяется на наружную ось 118 а и 118 с. Держатель 140 может быть реализован в различных конфигурациях и конструкциях. В различных вариантах выполнения держатель 140 может иметь резьбовую внутреннюю часть или резьбовую наружную часть для зацепления с витками 138 пружин 132. Следует отметить, что могут быть использованы и другие способы или устройства удержания пружин. Например, держатель 140 может представлять собой блокирующее устройство или зажимное устройство, которое может блокировать части пружин 132. В целом различные варианты выполнения обеспечивают различную жесткость пружины с помощью резьбового держателя 140. Например, держатель 140 содержит удерживающее устройство, которое может быть расположено на верхней или нижней части пружин 132. Как изображено на фиг. 5 и 6, выполненный с возможностью перемещения конец пружины 132, который взаимодействует с держателем 140, представляет собой нижний конец, тогда как верхний конец пружины 132 неподвижен. Например,привод работает, чтобы поворачивать держатель 140 для изменения жесткости пружин 132 (только одна пружина показана) путем изменения количества активных витков. В этом варианте выполнения привод может быть установлен на коробке оси или на других частях локомотива, например, на раме ходовой части. В различных вариантах выполнения привод установлен только на наружных осях 118 а и 118 с, которые содержат конструкцию 130 пружин с переменной жесткостью. Однако конструкция 130 пружин с переменной жесткостью с соответствующим приводом может быть предусмотрена на разных осях, к примеру, на каждой из внутренних осей 118b, при этом наружные оси 118 а и 188 с не будут содержать конструкцию 130 пружин с переменной жесткостью. В варианте выполнения, изображенном на фиг. 5 и 6, держатель 140 выполнен с внутренней резьбой. В этом варианте выполнения держатель 140 содержит резьбовую тарелку 160, которая выполнена с возможностью поворота. Резьбовая тарелка 160 имеет открытый конец 12 для вставления пружины 132 и закрытый конец 164, ограничивающий основание, что ограничивает максимальное количество витков 138 пружины 132, которое может быть удержано и заблокировано в резьбовой тарелке 160. Резьбовая тарелка 160 содержит одну или более внутренних резьб 166, имеющих размер и шаг, сопряженный с витками 138 пружины 132, так что, когда резьбовая тарелка 160 поворачивается, резьбы 166 зацепляются и удерживают некоторые из витков 138 или их части. Следует отметить, что конец пружины 132, противоположный концу пружины, который взаимодействует с резьбовой тарелкой 160, представляет собой неподвижный конец 168 (поддерживается на основании ходовой части), который воспринимает силу сжатия, например, от нагрузки, поддерживаемой системой подвески локомотива 122 (изображена на фиг. 2). Таким образом, как изображено на фиг. 5 и 6, когда резьбовая тарелка 160 поворачивается в направлении против часовой стрелки (изображено стрелкой CCW), большее количество витков пружины 132, например, еще один виток 138 пружины 132 зацепляется резьбовой тарелкой 160 и блокируется в ней. Например, резьбовая тарелка 160 может работать как гайка с закрытым концом, так что поворот приводит к тому, что большая часть пружины 132 зацепляется с резьбой 166 фрикционной посадкой. Как видно из фиг. 6, большее количество витков 138 пружины 132 остается в резьбовой тарелке 160 (после поворота резьбовой тарелки 160 против часовой стрелки), чем в резьбовой крышке 160, изображенной на фиг. 5. Таким образом, жесткость пружины 132, показанной на фиг. 5, меньше, чем пружины, показанной на фиг. 6, потому что количество активных витков 138 пружины 132, изображенной на фиг. 5, больше,чем количество активных витков 138 пружины 132, изображенной на фиг. 6. Таким образом, в различных вариантах выполнения величина силы сжатия, поддерживаемая пружиной 132, изменяется по мере изменения жесткости. В частности, жесткость пружины 132 может быть определена следующим уравнением 1:d - диаметр поперечного сечения пружины 132;G - модуль сдвига материала пружины;N - количество активных витков пружины 132. В процессе работы, с увеличением количества активных витков (N) жесткость уменьшается, а с уменьшением количества активных витков (N) жесткость увеличивается. Таким образом, резьбовая та-5 023993 релка 160 может работать или быть приведена в действие, например, в петле обратной связи, чтобы регулировать количество витков, которые являются активными, изменяя, тем самым, жесткость пружины 132. Путем регулировки жесткости различных пружин 132 нагрузка или вес локомотива могут быть перераспределены, как описано в настоящем документе. Таким образом, благодаря фиксации части пружины 132 в резьбовой тарелке 160 часть пружины 132 становится неэффективной или неактивной. По мере того, как жесткость пружины 132 увеличивается, нагрузка на другие пружины, соответствующие другим осям, уменьшается, а нагрузка на более жесткую пружину увеличивается. Таким же образом резьбовая тарелка 160 работает с пружиной 132 для регулировки жесткости пружины 132. Например, некоторые витки пружины 132 находятся в резьбе 166 резьбовой тарелки 160. Резьбовая тарелка 160 удерживает пружину 132 на одном конце, тогда как другой конец пружины 132 неподвижен. При повороте или вращении резьбовой тарелки 160 в одном направлении (против часовой стрелки, как показано), большее количество витков находится и удерживается в пределах резьбовой тарелки 160, которая уменьшает количество активных витков 138, увеличивая, тем самым, жесткость пружины 132. При повороте резьбовой крышки 160 в противоположном направлении (по часовой стрелке в настоящем примере) количество витков, находящихся в резьбовой тарелке 160 уменьшается, что увеличивает количество активных витков 138, уменьшая, тем самым, жесткость пружины 132. Следует отметить, что приведение в действие и перемещение резьбовой тарелки 160 может обеспечиваться и регулироваться с помощью любого устройства, такого как двигатель и т.д. В других вариантах выполнения, например, как изображено на фиг. 7, держатель 140 выполнен с наружной резьбой. В этом варианте выполнения держатель 140 содержит болт 170 с резьбой (или винт с резьбой), который выполнен с возможностью вращения. Болт 170 с резьбой содержит резьбу 172 для вмещения витков 138 пружины 132 и фиксации вмещенных витков 138 на месте, так что витки 138 становятся заблокированными и неактивными. В этом варианте выполнения болт 170 с резьбой расположен внутри витков 138 пружины 132. Как показано, только часть болта 170 содержит резьбу 172 (изображено в верхней части болта 170) для блокировки части пружины 132 путем фиксации, например, конкретных витков 138 в неподвижном положении. Держатель 140, содержащий болт 170 с резьбой, изображен установленным внутри осевой буксы 134. Тем не менее, следует отметить, что конструкция 130 пружин с переменной жесткостью с держателем 140 может быть выполнена и расположена в других местах локомотива в соединении с подвеской. В этом варианте выполнения болт 170 с резьбой поддерживается на нижнем конце корпусом рамы ходовой части. На другом конце болт 170 с резьбой вставлен через отверстие в осевой буксе 134 и соединен с опорным подшипником 178. Каждый из болтов 170 с резьбой соединен в своей верхней части с двигателем 180 через звездочку 182 и цепной привод 184. Следует отметить, что двигатель 180 может представлять собой двигатель любого типа, например, электродвигатель, который вызывает поворот болтов 170 с резьбой с помощью цепного привода 184. В дополнение к этому, соединительный механизм для соединения двигателя 180 с болтами 170 с резьбой может представлять собой любое подходящее соединительное средство, такое как приводной ремень, и т.д. Следует отметить, что аналогичный приводной механизм может использоваться для поворота резьбовой тарелки 160, изображенной на фиг. 5 и 6. В процессе работы путем вращения болтов 170 с резьбой количество заблокированных витков 138 а меняется, что также приводит к изменению жесткости пружины 132, как описано в настоящем документе. Таким образом, путем изменения количества неэффективных или неактивных витков 138, жесткость пружины 132 меняется, что изменяет нагрузку на пружины 132. Следует отметить, что в соединении с каждой из пружин 132 могут быть предусмотрены отдельные приводные механизмы, как изображено на фиг. 8. Кроме того, количество компонентов также может быть изменено. Например, несмотря на то, что на фиг. 8 показаны два двигателя 180, может быть предусмотрен только один двигатель 180. Таким образом, путем изменения жесткости наружных пружин 132 из локомотива 122 обеспечивается управление весом за счет перераспределения нагрузки между осями 118 локомотива 122. Например,предполагая следующие начальные условия, различные варианты выполнения обеспечивает следующее управление весом, как описано ниже.K1 представляет собой начальную жесткость всех пружин 132.FL1 представляет собой свободную длину всех пружин 132 в нормальном рабочем состоянии.Delta 1 представляет собой отклонение платформы ходовой части. Следует отметить, что все пружины отклоняются одинаково (delta 1 = F/3K1). Каждая пружина также принимает на себя одинаковую нагрузку (F/3). Следует отметить, что наружные пружины 132 подвески локомотива, соответствующей наружным осям 118, могут иметь дополнительные витки (например, четыре дополнительных витка) по сравнению с пружинами 132 внутренней оси 118. Дополнительных витки могут быть предусмотрены между поддерживаемыми концами конструкции 130 пружин с переменной жесткостью с использованием держателя 140. В процессе работы управление весом может быть осуществлено следующим образом. 1. Первоначально все пружины имеют свободную длину FL1 и жесткость K1. Суммарная начальная жесткость всех пружин равняется 3K1. 2. Под нагрузкой (F) все пружины отклоняются на одинаковую величину: delta1 = F/(3K1), так что нагрузка, воспринимаемая каждой из пружин = F/3. 3. Для наружных пружин путем поворота держателя 140 большее количество витков вставляется между ходовой частью и держателем 140. В результате, в связи с увеличением количества витков между держателем 140 и платформой ходовой части свободная длина наружной подвески изменяется держателем 140 от FL1 до FL2 (FL1FL2; K2K1). 4. В связи с увеличением количества активных витков (N), имеет место снижение жесткости наружной подвески от K1 до K2 (как описано в настоящем документе со ссылкой на уравнение 1), так чтоK2K1. Общая измененная жесткость всех пружин равняется 2K2+K1. Таким образом, общая начальная жесткость всех пружин равняется 3K1, которая больше, чем общая измененная жесткость всех пружин, которая равняется 2K2+K1. Таким образом, изменение жесткости приводит к следующему перераспределению нагрузки. 1. В изменившемся конечном состоянии, после приложения нагрузки F, платформа ходовой части остается параллельной земле, при этом свободные концы всех пружин находятся на равном расстоянии от земли. 2. Если средняя или внутренняя пружина отклоняется на величину delta2, то наружные пружины отклоняются на величину delta2 + (FL2-FL1), поскольку свободная длина наружных пружин (FL2) теперь больше, чем свободная длина внутренней пружины (FL1). 3. Нагрузка, воспринимаемая наружной подвеской, равна Lo = K2(delta2 + (FL2-FL1, а нагрузка,воспринимаемая внутренней или средней подвеской, равна Lm = K1delta2. 4. Эффект от предварительной нагрузки (K2(FL2-FL1 на наружную подвеску приводит к тому,что наружная подвеска начинает поддерживать значительную часть нагрузки (F). 5. Нагрузка, воспринимаемая внутренними или средними пружинами, равна: Lm = K1delta2, а нагрузка, воспринимаемая наружными пружинами, равна: Lo = K2(delta2 + (FL2-FL1. Так, например, предполагая, что имеется четыре подвески на каждом конце, а нагрузка F увеличилась в четыре раза с 52500 фунт-силы до 210000 фунт-силы, наружная нагрузка подвески увеличилась с 70000 фунт-силы (1750004) до 90000 (225004) фунт-силы, при этом нагрузка внутренней или средней подвески уменьшилась с 70000 фунт-силы (175004) до 30000 (750004) фунт-силы. Для динамического перераспределения веса в транспортном средстве также может быть предусмотрен способ 210, изображенный на фиг. 9. Способ 210 включает на этапе 212 выполнение пружин подвески транспортного средства с возможностью иметь переменную жесткость. Например, может быть предусмотрен механизм изменения части пружин, которые блокируются, чтобы сделать эту часть пружин неактивной или неэффективной, с использованием конструкции пружин с переменной жесткостью,как описано в настоящем документе. Способ 210 затем включает на этапе 214 установку конструкции пружин с переменной жесткостью на транспортное средство. Например, пружины, имеющие конструкцию с переменной жесткостью, могут быть установлены на транспортное средство или его часть, например, коробку оси. В некоторых вариантах выполнения конструкция пружин с переменной жесткостью устанавливается на пружины наружной оси, но не на внутреннюю ось трехосевой ходовой части, причем транспортное средство содержит две ходовых части. Когда конструкция пружин с переменной жесткостью установлена вместе с пружинами, жесткость пружины регулируют на этапе 216 путем блокировки части пружин. Например, путем изменения количества активных витков жесткость пружин изменяется, что является причиной перераспределения нагрузки между осями транспортного средства. Регулирование может осуществляться путем использования управляющего модуля, который динамически регулирует количество витков заблокированных пружин. Изменения в жесткости могут быть основаны на различных факторах, таких как режим работы с ограниченной тягой. Таким образом, различные варианты выполнения могут динамически управлять распределением веса путем изменения жесткости пружины в транспортном средстве. Например, путем изменения количества витков, которые являются неэффективными или неактивными, что может быть осуществлено путем блокировки количества витков, жесткость пружин изменяется. Различные варианты выполнения могут быть реализованы без изменений в раме транспортного средства. Например, двигатель и конструкция пружин с переменной жесткостью могут быть установлены на раме транспортного средства либо с внутренней, либо с наружной стороны рамы. Следует понимать, что приведенное выше описание предназначено для иллюстрации, а не ограничения изобретения. Например, описанные выше варианты выполнения (и/или его аспекты) могут быть использованы в комбинации друг с другом. В дополнение, для адаптации конкретной ситуации или материала к идеям изобретения, без отхода от объема изобретения, могут быть сделаны многочисленные модификации. Несмотря на то что размеры и типы материалов, описанные в настоящем документе,предназначены для определения параметров раскрытого предмета изобретения, они ни в коем случае не ограничивают изобретения и являются исключительно иллюстративными вариантами выполнения. Многие другие варианты выполнения будут очевидны специалисту в данной области техники при рассмотрении приведенного выше описания. Объем предмета изобретения, описанного в настоящем документе,должен быть, следовательно, определяться в соответствии с формулой изобретения, наряду с полным объемом эквивалентов, к которым такие требования применяются. В прилагаемой формуле изобретения термины "включающий" и "в котором" используются в качестве эквивалентов соответствующих терминов "содержащий" и "где". Кроме того, в последующей формуле изобретения термины "первый", "второй" и "третий" и т.д. используются лишь как метки, а не предназначены для установления численных требований к объектам. В этом описании примеры используются для раскрытия нескольких вариантов выполнения описанного выше предмета изобретения, включая наилучший режим, а также для представления любому специалисту в данной области техники возможности реализовать на практике варианты выполнения изобретения, в том числе создавать и использовать любые устройства или системы и выполнять любые включенные в настоящий документ способы. Патентоспособный объем изобретения, описанного в настоящем документе, определяется формулой изобретения и может включать другие примеры, которые будут очевидны для специалиста в данной области техники. Такие другие примеры предназначены находиться в рамках формулы изобретения, если они имеют конструктивные элементы, которые ничем не отличаются от буквальной формулировки формулы изобретения, или если они включают эквивалентные конструктивные элементы с несущественными отличиями от буквальной формулировки формулы изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Подвеска (142) транспортного средства, содержащая пружины (132); держатели (140) пружин (132), выполненные с возможностью регулировки количества неактивных витков (138) указанных пружин (132) для изменения жесткости пружин; двигатель (180), соединенный с указанными держателями (140) пружин и выполненный с возможностью приведения в действие держателей (140) пружин для регулировки количества неактивных витков(138) указанных пружин (132); контроллер (114), соединенный с двигателем (180) и предназначенный для управления двигателем для приведения в действие держателей (140) пружин для регулировки количества неактивных витков(138) указанных пружин (132). 2. Подвеска по п.1, в которой контроллер (114) выполнен с возможностью динамического управления двигателем (180) для приведения в действие держателей пружин для регулировки количества неактивных витков указанных пружин на основе рабочих условий. 3. Подвеска по п.1, в которой указанные держатели (140) пружин (132) выполнены с возможностью блокировки большего или меньшего количества витков (138) указанных пружин (132) для регулирования количества неактивных витков. 4. Подвеска по п.3, в которой один конец (168) указанных пружин (132) закреплен, а противоположный конец является подвижным, причем указанные держатели (140) взаимодействуют с подвижными концами пружин (132). 5. Подвеска по п.4, в которой держатель пружины (132) выполнен в виде поворотного элемента(160), снабженного внутренней резьбой (166) и имеющего открытый конец для размещения в нем подвижного конца пружины (132) с обеспечением сцепления внутренней резьбы (166) держателя с витками(138) указанного конца пружины (132) и изменения количества витков, удерживаемых резьбой (166) держателя, при его повороте, а двигатель (180) соединен с держателем (160) с обеспечением возможности его поворота. 6. Подвеска по п.5, в которой конец держателя (160), противоположный его открытому концу, выполнен закрытым для ограничения максимального количества блокируемых витков (138). 7. Подвеска по п.3, в которой держатель пружины (132) выполнен в виде поворотного болта (170) с наружной резьбой (172), установленного внутри пружины (132) с обеспечением сцепления указанной резьбы (172) с витками (138) подвижного конца пружины (132) и изменения количества витков, удерживаемых резьбой (172) болта, при его повороте, а двигатель (180) соединен с болтом (170) с обеспечением возможности его поворота. 8. Подвеска по п.7, в которой наружная резьба (172) выполнена лишь вдоль части болта (170) с резьбой. 9. Транспортное средство, содержащее раму, на которой размещены несколько осей, каждая из которых соединена с рамой посредством соответствующей ей пружинной подвески, по меньшей мере одна из которых выполнена в виде подвески (142) по любому из пп.1-8, при этом по меньшей мере одна из указанных осей соединена с тяговым двигателем (110) транспортного средства. 10. Транспортное средство по п.9, в котором указанные оси включают крайние оси и расположенную между ними промежуточную ось, причем только подвеска промежуточной оси выполнена в виде подвески (142) по любому из пп.1-8. 11. Транспортное средство по п.10, в котором тяговые двигатели (110) соединены только с крайними осями, а держатели (140) пружин (132) изменяют жесткость указанных пружин (132) для перераспределения нагрузки с промежуточной оси на крайние оси.
МПК / Метки
МПК: B61F 5/36
Метки: транспортное, средства, подвеской, подвеска, средство, транспортного
Код ссылки
<a href="https://eas.patents.su/12-23993-podveska-transportnogo-sredstva-i-transportnoe-sredstvo-s-takojj-podveskojj.html" rel="bookmark" title="База патентов Евразийского Союза">Подвеска транспортного средства и транспортное средство с такой подвеской</a>
Коpпус подшипника колесной пары с устройством определения положения для рельсового транспортного средства и снабженное им рельсовое транспортное средство
Номер патента: 20349
Опубликовано: 30.10.2014
Авторы: Йох Мартин, Целлер Райнхард, Печниг Гюнтер
МПК: B61D 43/00, B61F 15/20, B61L 25/02...
Метки: средства, средство, рельсовое, положения, коpпус, транспортное, устройством, рельсового, снабженное, колесной, пары, определения, транспортного, подшипника
Формула / Реферат:
1. Корпус (10) подшипника колесной пары для рельсового транспортного средства, содержащий встроенное в него устройство (9) определения положения и выполненный с возможностью закрепления без возможности вращения на рельсовом транспортном средстве, причем встроенное устройство (9) определения положения имеет спутниковый радиоприемник (4) определения положения, радиопередатчик (3), выполненный с возможностью передачи полученных от радиоприемника...
Независимая подвеска колеса транспортного средства
Номер патента: 11530
Опубликовано: 28.04.2009
Авторы: Ефремов Владимир Лаврентьевич, Николаев Юрий Иванович
МПК: B60G 3/20, B60G 11/00
Метки: подвеска, независимая, средства, колеса, транспортного
Формула / Реферат:
1. Независимая подвеска управляемых колес транспортного средства, содержащая связанные между собой раму, по меньшей мере одну пару ступиц колес, связанных со стойками, которые, в свою очередь, связаны с рамой посредством направляющего устройства, выполненного в виде поперечных нижнего и верхнего рычагов, один конец каждого из которых шарнирно соединен с рамой транспортного средства, а второй посредством шарового шарнира связан с поворотной...
Пружинная подвеска сиденья двухколесного транспортного средства
Номер патента: 228
Опубликовано: 24.12.1998
Автор: Халс Като
МПК: B62J 1/06
Метки: транспортного, подвеска, двухколесного, средства, пружинная, сиденья
Формула / Реферат:
1. Узел держателя подпружиненного сиденья для двухколесного транспортного средства, преимущественно велосипеда, содержащего раму, которая включает направленную вниз седельную трубку (21); упомянутый узел приспособлен для обычного ввода и закрепления в упомянутой седельной трубке (21) и поддержания обычного велосипедного седла; кроме того, упомянутая подвеска включает -деталь седельной стойки (20) для ввода и закрепления в упомянутой седельной...
Способ определения местоположения терпящего бедствие транспортного средства и поддержки оператора транспортного средства
Номер патента: 6782
Опубликовано: 28.04.2006
Автор: Сухолитко Валентин Афанасьевич
Метки: транспортного, терпящего, местоположения, поддержки, бедствие, оператора, определения, способ, средства
Формула / Реферат:
Способ определения местоположения терпящего бедствие транспортного средства и поддержки оператора транспортного средства, заключающийся в том, что формируют базу знаний по набору возможных программ, а также по результатам анализа и опыта исследований аварий и катастроф с помощью экспертной системы оценивают работоспособность оператора транспортного средства, бортового оборудования транспортного средства и работу оператора, прогнозируют аварийные...
Система для определения давления в шине транспортного средства и / или скорости транспортного средства
Номер патента: 14154
Опубликовано: 29.10.2010
Авторы: Пингель Ульрих, Пингель Мартин
МПК: G01L 17/00
Метки: система, определения, транспортного, давления, средства, шине, скорости
Формула / Реферат:
1. Система для определения давления в установленной на транспортном средстве пневматической шине транспортного средства и/или скорости транспортного средства, содержащаясистему датчиков нагрузки, которая выдает силовой сигнал для двумерного образа распределения сил, действующих со стороны шины транспортного средства при контакте с датчиками при перемещении транспортного средства через систему;компьютер, который запрограммирован таким образом,...
Предыдущий патент: Трехосная тележка для рельсового транспортного средства
Следующий патент: Аппарат для маркирования объекта, аппарат для сканирования объекта и способ маркирования и сканирования объекта с их использованием
Случайный патент: Солнечный радиатор