Электрический двигатель
Формула / Реферат
1. Электрический двигатель, содержащий
статор, имеющий обмотки статора, образующие по меньшей мере две фазы статора,
ротор с выступающими полюсами внутри статора, причем ротор отделен от статора воздушным зазором и имеет такую форму и конфигурацию, что конфигурация выступающих полюсов задает путь с более высоким и более низким магнитным сопротивлением через зазор между ротором и статором, при этом ротор дополнительно содержит обмотку возбуждения вокруг выступающих полюсов ротора, которая образует по меньшей мере одну пару полюсов и заканчивается избирательным электрическим переключателем, который определяет электрическую целостность обмотки возбуждения, в результате чего подача обратного напряжения смещения на переключатель приводит к размыканию обмотки возбуждения, и средство управления, обеспечивающее регулирование намагничивания обмотки возбуждения путем подачи напряжения на фазу статора, связанную с обмоткой возбуждения через путь с более низким магнитным сопротивлением, в результате чего находящаяся под напряжением фаза статора, в свою очередь, обеспечивает подачу обратного напряжения смещения на переключатель посредством индукции, которое препятствует течению тока в обмотке возбуждения, но напряжение, подаваемое на фазу статора, увеличивает магнитную индукцию в роторе, после чего средство управления прекращает подачу напряжения по достижении заранее определенной магнитной индукции в роторе, при этом прекращение подачи напряжения индуцирует напряжение, обратное прямому напряжению смещения на переключателе, что позволяет току течь в обмотке возбуждения, причем ток препятствует снижению магнитной индукции в роторе, а средство управления дополнительно обеспечивает регулирование создания крутящего момента в двигателе путем подачи напряжения на другую фазу статора, не отвечающую за возбуждение обмотки возбуждения в этот момент времени, благодаря чему в любой момент одна фаза статора служит для намагничивания обмотки возбуждения, тогда как другая фаза или другие фазы отвечает(ют) за создание крутящего момента, в результате чего при вращении все фазы статора попеременно принимают на себя функцию создания крутящего момента и регулировки намагничивания обмотки возбуждения ротора.
2. Двигатель по п.1, в котором избирательный переключатель содержит разрядный диод.
3. Двигатель по п.1, в котором избирательный переключатель содержит полупроводниковое электронное устройство.
4. Двигатель по любому из пп.1-3, в котором средство управления содержит микропроцессор.
5. Двигатель по любому из пп.1-4, в котором средство управления содержит электронные переключатели для управления подачей напряжения на фазы статора.
6. Двигатель по любому из пп.1-5, в котором средство управления содержит датчики, определяющие положение ротора относительно фаз статора для регулирования моментов времени подачи напряжения на фазы.
7. Двигатель по любому из пп.1-5, в котором средство управления предназначено для определения положения ротора из характеристик тока и напряжения фаз статора.
8. Двигатель по любому из пп.1-7, в котором средство управления обеспечивает регулирование магнитной индукции в роторе в зависимости от оборотов двигателя.
9. Двигатель по любому из пп.1-8, в котором средство управления позволяет при определенных условиях использовать двигатель в качестве генератора.

Текст
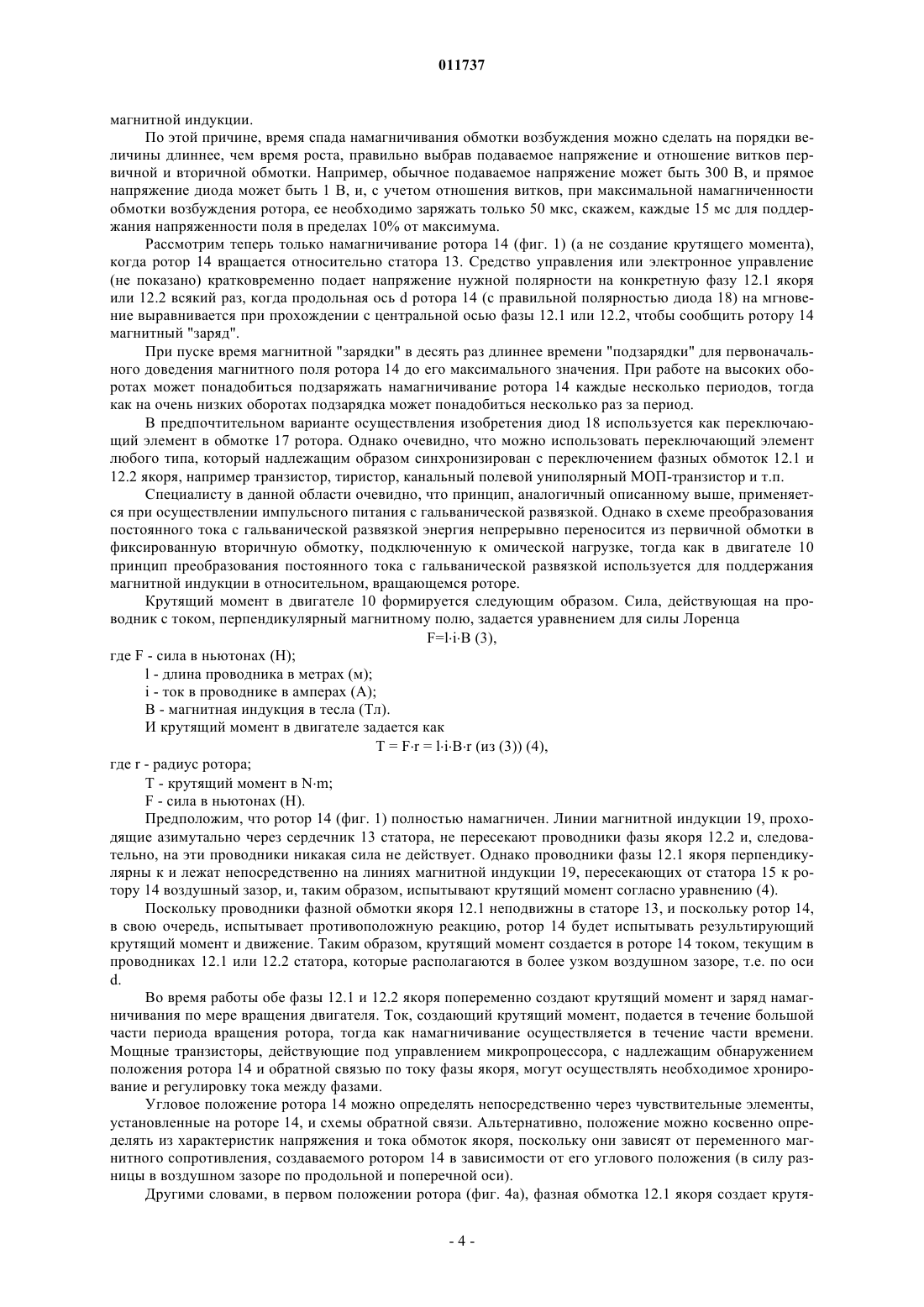
011737 Область техники Настоящее изобретение относится к электрическому двигателю. Предшествующий уровень техники Синхронный двигатель обладает существенными преимуществами над асинхронным двигателем и двигателем постоянного тока. В синхронном двигателе обороты ротора строго пропорциональны частоте системы, которая снабжает синхронный двигатель электрической мощностью. Соответственно, синхронный двигатель дополнительно характеризуется тем, что он работает на постоянных оборотах (при постоянной частоте питания) с опережающим коэффициентом мощности и имеет низкий пусковой ток. КПД такого двигателя обычно выше, чем у электрических двигателей других типов. Якорь синхронного двигателя, в общем случае, содержит один набор многофазных распределенных обмоток переменного тока, обычно размещенных на статоре или другой кольцевой детали двигателя. В этом случае обмотка возбуждения двигателя обычно располагается в роторе и обычно содержит более одной пары полюсов. В целом, ясно, что полюсы возбуждения возбуждаются постоянным током. Конструкция и способ возбуждения обмотки возбуждения ротора определяет тип синхронного двигателя. В общем случае, необходимы отдельный возбудитель, контактные кольца и щетки. Возбудитель, контактные кольца и щетки упразднены в синхронизированном асинхронном двигателе, где конструкция ротора предусматривает наличие путей с разными магнитными сопротивлениями через воздушный зазор между статором и ротором, что способствует созданию реактивного момента. На роторе нет обмотки возбуждения, и поэтому источник возбуждения не нужен. Затем обмотки якоря статора напрямую подключаются к сети переменного тока. Асинхронный двигатель прост и дешев в изготовлении, но не обладает характеристиками синхронного двигателя. С другой стороны, синхронные двигатели с контактными кольцами сложнее и дороже,поскольку для их работы необходимы возбудитель, контактные кольца и щетки. Это также повышает требования к обслуживанию, тогда как асинхронный двигатель практически не требует обслуживания. Щеточные двигатели постоянного тока имеют аналогичные недостатки, хотя ими проще управлять, и они имеют высокие тяговые характеристики. Контактные кольца и щетки упразднены в бесщеточных синхронных двигателях, но конфигурация бесщеточного возбудителя переменного тока все же предусматривает дополнительную стоимость, занимаемое место и сложность. Синхронные двигатели с постоянными магнитами выглядят наиболее привлекательно. Однако производство и высокая стоимость постоянных магнитов с высокой напряженностью поля и процесс присоединения этих магнитов к ротору, особенно для больших машин, является сложной инженерной задачей. Максимальная напряженность поля постоянных магнитов также ограничивается современным уровнем техники. Синхронизированный асинхронный двигатель, хотя и имеет очень простую конструкцию, не очень эффективен и обычно гораздо больше синхронного двигателя с контактными кольцами,имеющего сходные характеристики. На практике синхронизированные асинхронные двигатели не находят широкого применения для мощностей свыше нескольких киловатт. Сущность изобретения Задачей изобретения является создание электрического двигателя, в котором отсутствуют указанные недостатки и который прост, экономичен в производстве, но имеет характеристики выше, чем у синхронного двигателя, асинхронного двигателя и щеточного/бесщеточного двигателя, при этом от имеет более высокие плотности мощности и КПД по сравнению с известными, высокий пусковой крутящий момент при низком пусковом токе. Согласно изобретению предложен электрический двигатель, содержащий статор, имеющий обмотки статора, образующие одну или несколько фаз статора, ротор с выступающими полюсами внутри статора, причем ротор отделен от статора воздушным зазором, при этом ротор имеет такую форму и конфигурацию, что конфигурация выступающих полюсов задает путь с более высоким и более низким магнитным сопротивлением через зазор между ротором и статором, и ротор дополнительно включает в себя обмотку возбуждения вокруг выступающих полюсов ротора, причем обмотка возбуждения способна образовывать по меньшей мере одну пару полюсов и заканчивается избирательным электрическим переключателем, который определяет электрическую целостность обмотки возбуждения, в результате чего подача обратного напряжения смещения на переключатель приводит к размыканию обмотки возбуждения, и средство управления, предназначенное для регулирования намагничивания обмотки возбуждения путем подачи напряжения на фазу статора, связанную с обмоткой возбуждения через путь с более низким магнитным сопротивлением, при этом находящаяся под напряжением фаза статора обеспечивает подачу обратного напряжения смещения на переключатель посредством индукции, причем обратное смещение препятствует течению тока в обмотке возбуждения, но напряжение, подаваемое на фазу статора, увеличивает магнитную индукцию в роторе, после чего средство управления прекращает подачу напряжения по достижении заранее определенной магнитной индукции в роторе, в результате прекращение подачи напряжения индуцирует напряжение, обратное прямому напряжению смещения на переключателе, что позволяет току течь в обмотке возбуждения, причем ток препятствует снижению магнитной индукции в роторе, и средство управления дополнительно обеспечивает регулирование создания крутящего-1 011737 момента в двигателе путем подачи напряжения на другую фазу статора, не отвечающую за возбуждение обмотки возбуждения, в этот момент времени, при этом в любой данный момент одна фаза статора используется для намагничивания обмотки возбуждения, тогда как другая фаза или другие фазы отвечает/ют за создание крутящего момента, при этом при вращении, все фазы статора попеременно принимают на себя функцию создания крутящего момента и регулировки намагничивания обмотки возбуждения ротора. Предпочтительно избирательный переключатель в обмотке возбуждения повышает КПД двигателя за счет эффективного захвата магнитной индукции в роторе, когда ток имеет возможность течь в обмотке возбуждения. Теперь уже не требуется, чтобы обмотка статора непрерывно подавала ток намагничивания, а также крутящий ток, как в существующих асинхронных двигателях. Предпочтительно в двигателе применяется принцип импульсного преобразования постоянного тока с гальванической развязкой для намагничивания ротора. Статор может включать в себя совокупность упакованных слоев металла с прорезями для ослабления вихревых токов в статоре. Ротор может включать в себя совокупность упакованных слоев металла с прорезями для ослабления вихревых токов в роторе. Избирательный переключатель может содержать разрядный диод. Избирательный переключатель может содержать полупроводниковое устройство, например транзистор, тиристор и т.п. Средство управления может содержать микропроцессор. Средство управления может также содержать электронные переключатели для управления подачей напряжения на фазы статора. Электронные переключатели могут включать в себя транзисторы. Соответственно, электронные переключатели могут иметь конфигурацию Н-моста. Средство управления может включать в себя датчики, воспринимающие положение ротора относительно фаз статора, для регулировки моментов времени подачи напряжения на фазы. Средство управления может иметь возможность определять положение ротора из характеристик тока и напряжения фаз статора. Средство управления может регулировать магнитную индукцию в роторе в зависимости от оборотов двигателя, например при высоких оборотах обмотку возбуждения нужно намагничивать лишь через каждые несколько оборотов ротора, тогда как при низких оборотах обмотку возбуждения может потребоваться намагничивать несколько раз в течение одного оборота ротора. При соответствующих условиях средство управления может иметь возможность управлять двигателем как генератором. Фаза статора может быть предназначена для намагничивания обмотки возбуждения. Соответственно, фаза статора может быть предназначена для создания крутящего момента в двигателе. Краткое описание чертежей В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения, не являющихся неограничительными ссылками на прилагаемые чертежи, на которых фиг. 1 изображает радиальный разрез электрического двигателя согласно изобретению; фиг. 2 - осевой разрез электрического двигателя, показанного на фиг. 1, согласно изобретению; фиг. 3 - схему цепи, представляющей взаимодействие фаз якоря с обмоткой возбуждения при проходе через более низкое магнитное поле, согласно изобретению; фиг. 4 а и 4b - радиальный разрез ротора двигателя в разных положениях относительно якоря согласно изобретению; фиг. 5 - диаграммы тока и магнитной индукции разных обмоток возбуждения и якоря при работе двигателя согласно изобретению; фиг. 6 - схему средства управления согласно одному варианту осуществления изобретения; фиг. 7 - разрез другого варианта осуществления двигателя согласно изобретению; фиг. 8 - диаграммы тока обмоток якоря при работе двигателя, показанного на фиг. 7, согласно изобретению. Подробное описание предпочтительных вариантов воплощения изобретения Двигатель 10 (фиг. 1 и 2) согласно изобретению содержит упакованные слои стали с прорезями 11 для размещения обмоток 12 якоря, которые совместно образуют статор 13. Обмотки 12 якоря дополнительно делятся на две отдельные обмотки 12.1 и 12.2, образующие две отдельные фазы. Аналогично, внутренняя деталь состоит из упакованных слоев стали 15, соответственно прикрепленных к ведущему валу 16, с обмоткой 17 возбуждения, заканчивающейся избирательным переключателем, представляющим собой в этом варианте осуществления разрядный или выпрямительный диод 18,которые совместно образуют ротор 14, способный вращаться относительно статора 13. Для лучшего понимания на фиг. 1 показана система координат d-q. Эта система координат связана или привязана к ротору 14. Что касается конфигурации выступающих полюсов ротора 14, воздушный зазор по продольной оси d значительно меньше воздушного зазора по поперечной оси q. Магнитное сопротивление магнитной цепи вдоль оси q, таким образом, значительно больше магнитного сопротивления вдоль оси d. Это важная особенность изобретения, определяющая его режим работы. Более высокое магнитное сопротивление по оси q ослабляет магнитную связь фазы якоря, создаю-2 011737 щей крутящий момент, с ротором 14, что желательно. Увеличенный воздушный зазор вдоль оси q также обеспечивает место для обмотки 17 возбуждения. Очевидно, что изобретение, в общем случае, требует, чтобы ротор 14 имел конфигурацию выступающих полюсов. Форма слоев 15 примерно такая же, как у реактивного синхронного двигателя (не показан), но двигатель 10 не работает на реактивном моменте; обмотка 17 возбуждения и диод 18 совместно непосредственно участвуют в создании крутящего момента. В показанном варианте осуществления ротор 14 имеет одну пару полюсов, но в других вариантах осуществления ротор может иметь несколько пар полюсов. Аналогично, в других вариантах осуществления статор 13 может иметь более двух фаз. Рассмотрим теперь положение ротора 14 относительно фазных обмоток 12.1 и 12.2 якоря (фиг. 1). Одним новым аспектом изобретения является метод намагничивания пары полюсов ротора 14, т.е. метод возбуждения обмотки 17 возбуждения. Отвлечемся на момент от действия обмотки 17 возбуждения; ток,поступающий на фазу якоря 12.1, создает магнитное поле в направлении оси q. Аналогично, ток, поступающий на фазу якоря 12.2, создает магнитное поле в направлении оси d. Магнитное поле по оси d во много раз больше, чем по оси q вследствие гораздо большего магнитного сопротивления по оси q. Во время работы, неподвижной или вращательной, благодаря правильному хронированию и переключению фаз 12.1 и 12.2 якоря, магнитное поле возбуждения ротора 14 поддерживается на максимуме вдоль оси d и на минимуме вдоль оси q (по существу, на нуле). Когда центральная ось фазной обмотки 12.1 или 12.2 якоря выровнена с продольной осью d ротора 14, конкретная обмотка якоря сильно связана с обмоткой 17 возбуждения. Аналогично, когда центральная ось фазной обмотки 12.1 или 12.2 якоря выровнена с поперечной осью q ротора 14, конкретная обмотка якоря слабо связана с обмоткой 17 возбуждения. На фиг. 3 показана схема трансформаторного представления обмотки 12.2 якоря, сильно связанной с обмоткой 17 возбуждения, заканчивающейся диодом 18. Обмотка 12.2 якоря служит первичной обмоткой трансформатора 20, и обмотка 17 возбуждения служит вторичной обмоткой трансформатора 20. Очевидно, что трансформаторное представление пригодно только тогда, когда центральная ось фазной обмотки 12.2 якоря выровнена с продольной осью d ротора, т.е. в случае сильной связи. Когда обмотка 12.2 якоря ориентирована под прямым углом к обмотке 17 возбуждения, трансформаторное действие отсутствует, поскольку центральные оси соответствующих обмоток перпендикулярны друг другу. Черные точки 21.1 и 21.2 обозначают "одинаковую" полярность соответствующих обмоток. Существует два положения ротора 14 в одном полном периоде вращения, когда центральная ось фазы 12.2 якоря выровнена с осью d ротора. В первом положении, когда переключатель 22 замкнут, в результате чего положительное напряжение подается на первичную обмотку 12.2, диод 18 получает обратное смещение, как показано на фиг. 3. Во втором положении, когда ротор 14 повернут на 180 относительно положения, при котором положительное напряжение подается на первичную обмотку 12.2, диод 18 получает прямое смещение (не показано). В первом положении переключатель 22 замкнут, в результате чего положительное напряжение подается на первичную обмотку 12.2. Напряжение индуцируется во вторичной обмотке 17, которая подает на диод 18 обратное смещение, препятствующее протеканию тока во вторичной обмотке 17. Однако ток намагничивания в первичной обмотке 12.2 и, следовательно, магнитная индукция в слоях 15 ротора увеличивается или линейно возрастает от нуля, согласноL - индуктивность первичной обмотки в генри (Гн);dt - интервал времени в секундах (с). Переключатель 22 размыкается, когда магнитная индукция достигает заранее определенного или нужного значения. Это разрывает ток первичной обмотки, который должен снизиться до нуля, поэтому скорость изменения тока di/dt отрицательна, и согласно уравнению (1) напряжение на первичной обмотке становится отрицательным. Соответственно, вторичная обмотка 17 также испытывает обращение напряжения благодаря индукции, вследствие чего диод 18 получает прямое смещение и открывается. Таким образом, ток, индуцируемый во вторичной обмотке 17, пропорционален магнитной индукции, созданной в многослойном сердечнике 15 первичной обмоткой 12.2, в первом положении. Ток в обмотке возбуждения ротора 17 эффективно захватывает магнитную индукцию в многослойном сердечнике 15. Очевидно, что напряжение, создаваемое на вторичной обмотке 17 за счет прямого напряжения диода 18, гораздо ниже напряжения, первоначально существовавшего на первичной обмотке 12.2. Согласно уравнению (1) это значит, что скорость уменьшения тока di/dt вторичной обмотки 17 и, следовательно,магнитной индукции значительно ниже скорости роста тока первичной обмотки 12.2 и, следовательно,-3 011737 магнитной индукции. По этой причине, время спада намагничивания обмотки возбуждения можно сделать на порядки величины длиннее, чем время роста, правильно выбрав подаваемое напряжение и отношение витков первичной и вторичной обмотки. Например, обычное подаваемое напряжение может быть 300 В, и прямое напряжение диода может быть 1 В, и, с учетом отношения витков, при максимальной намагниченности обмотки возбуждения ротора, ее необходимо заряжать только 50 мкс, скажем, каждые 15 мс для поддержания напряженности поля в пределах 10% от максимума. Рассмотрим теперь только намагничивание ротора 14 (фиг. 1) (а не создание крутящего момента),когда ротор 14 вращается относительно статора 13. Средство управления или электронное управление(не показано) кратковременно подает напряжение нужной полярности на конкретную фазу 12.1 якоря или 12.2 всякий раз, когда продольная ось d ротора 14 (с правильной полярностью диода 18) на мгновение выравнивается при прохождении с центральной осью фазы 12.1 или 12.2, чтобы сообщить ротору 14 магнитный "заряд". При пуске время магнитной "зарядки" в десять раз длиннее времени "подзарядки" для первоначального доведения магнитного поля ротора 14 до его максимального значения. При работе на высоких оборотах может понадобиться подзаряжать намагничивание ротора 14 каждые несколько периодов, тогда как на очень низких оборотах подзарядка может понадобиться несколько раз за период. В предпочтительном варианте осуществления изобретения диод 18 используется как переключающий элемент в обмотке 17 ротора. Однако очевидно, что можно использовать переключающий элемент любого типа, который надлежащим образом синхронизирован с переключением фазных обмоток 12.1 и 12.2 якоря, например транзистор, тиристор, канальный полевой униполярный МОП-транзистор и т.п. Специалисту в данной области очевидно, что принцип, аналогичный описанному выше, применяется при осуществлении импульсного питания с гальванической развязкой. Однако в схеме преобразования постоянного тока с гальванической развязкой энергия непрерывно переносится из первичной обмотки в фиксированную вторичную обмотку, подключенную к омической нагрузке, тогда как в двигателе 10 принцип преобразования постоянного тока с гальванической развязкой используется для поддержания магнитной индукции в относительном, вращающемся роторе. Крутящий момент в двигателе 10 формируется следующим образом. Сила, действующая на проводник с током, перпендикулярный магнитному полю, задается уравнением для силы Лоренцаi - ток в проводнике в амперах (А); В - магнитная индукция в тесла (Тл). И крутящий момент в двигателе задается как Т = Fr = liBr (из (3 (4),где r - радиус ротора; Т - крутящий момент в Nm;F - сила в ньютонах (Н). Предположим, что ротор 14 (фиг. 1) полностью намагничен. Линии магнитной индукции 19, проходящие азимутально через сердечник 13 статора, не пересекают проводники фазы якоря 12.2 и, следовательно, на эти проводники никакая сила не действует. Однако проводники фазы 12.1 якоря перпендикулярны к и лежат непосредственно на линиях магнитной индукции 19, пересекающих от статора 15 к ротору 14 воздушный зазор, и, таким образом, испытывают крутящий момент согласно уравнению (4). Поскольку проводники фазной обмотки якоря 12.1 неподвижны в статоре 13, и поскольку ротор 14,в свою очередь, испытывает противоположную реакцию, ротор 14 будет испытывать результирующий крутящий момент и движение. Таким образом, крутящий момент создается в роторе 14 током, текущим в проводниках 12.1 или 12.2 статора, которые располагаются в более узком воздушном зазоре, т.е. по осиd. Во время работы обе фазы 12.1 и 12.2 якоря попеременно создают крутящий момент и заряд намагничивания по мере вращения двигателя. Ток, создающий крутящий момент, подается в течение большой части периода вращения ротора, тогда как намагничивание осуществляется в течение части времени. Мощные транзисторы, действующие под управлением микропроцессора, с надлежащим обнаружением положения ротора 14 и обратной связью по току фазы якоря, могут осуществлять необходимое хронирование и регулировку тока между фазами. Угловое положение ротора 14 можно определять непосредственно через чувствительные элементы,установленные на роторе 14, и схемы обратной связи. Альтернативно, положение можно косвенно определять из характеристик напряжения и тока обмоток якоря, поскольку они зависят от переменного магнитного сопротивления, создаваемого ротором 14 в зависимости от его углового положения (в силу разницы в воздушном зазоре по продольной и поперечной оси). Другими словами, в первом положении ротора (фиг. 4 а), фазная обмотка 12.1 якоря создает крутя-4 011737 щий момент при переносе тока, и, в то же время, фазная обмотка 12.2 якоря заряжает магнитное поле в роторе 14. Аналогично, во втором положении ротора (фиг. 4b), они меняются ролями, и фазная обмотка 12.2 якоря создает крутящий момент, а фазная обмотка якоря 12.1 заряжает магнитное поле в роторе 14. Графики, показывающие зависимость токов I12.1, I12.2 и I17 в фазных обмотках 12.1, 12.2 якоря и обмотке 17 возбуждения ротора, соответственно, и магнитной индукции B14 ротора 14 от времени в течение одного полного периода вращения приведены на фиг. 5, для конкретного направления вращения. Формы сигнала тока I12.1 и I12.2 фазы якоря состоят из двух сегментов создания крутящего момента и двух импульсов намагничивания в полном периоде. Очевидно, что направление вращения ротора 14 легко сменить на обратное, изменив полярность одного из токов фазы якоря, I12.1 или I12.2, или просто поменяв местами последовательности хронирования I12.1 и I12.2. Двигатель 10 будет действовать как генератор, если обратить полярность сегментов создания крутящего момента в токах I12.1 и I12.2 фазы якоря, но с теми же хронированием и полярностью импульсов тока намагничивания (фиг. 5). В режиме двигателя или генерации, в прямом или обратном направлении, хронирование токов синхронизировано с положением ротора 14. На фиг. 6 показана электронная схема для средства управления возбуждением двигателя 10. В нее включены схематическое представление двигателя 10, демонстрирующее обмотки 12.1 и 12.2 якоря; ротор 14, обмотка возбуждения 17 ротора и разрядный диод 18. Согласно показанному варианту осуществления, питание от источника постоянного тока (не показан) поступает по главной шине постоянного тока 45.1 и 45.2 для двигателя 10. Конфигурация "Н-моста" из канальных полевых униполярных МОП-транзисторов 40.1, 40.2, 40.3, 40.4 используется для переключения необходимого тока на фазную обмотку 12.1 якоря, и конфигурация "Н-моста" из канальных полевых униполярных МОП-транзисторов 42.1, 42.2, 42.3, 42.4 используется для переключения необходимого тока на фазную обмотку 12.2 якоря. Это позволяет независимо управлять каждой фазой, для положительной и отрицательной полярности тока и, с применением широтно-импульсной модуляции, независимо управлять величинами токов. Микропроцессор 52 управляет переключением MOSFET через интерфейс 50 драйвера MOSFET и,таким образом, непосредственно управляет хронированием, величиной и полярностью токов I12.1, I12.2 иI17. Датчики 41.1, 41.2, 41.3, 41.4 тока выдают сигналы обратной связи на микропроцессор 52 через аналого-цифровой преобразователь 54 для регулировки величины тока. Положение ротора 14 относительно статора 13 необходимо микропроцессору для управления фазными токами I12.1 и I12.2 и током I17 обмотки возбуждения ротора, в отношении величины и хронирования(фиг. 5). В качестве примера средства обнаружения положения ротора показаны диск 30, присоединенный с возможностью вращения к ротору 14, и четыре оптически отражающих датчика 31.1, 31.2, 31.3,31.4, фиксированные относительно статора двигателя. Диск 30 имеет 90 сегмент, покрытый отражающей краской (белой), как показано, тогда как оставшийся 270 сегмент не отражает свет. Сигналы от оптических датчиков 31.1, 31.2, 31.3, 31.4 возвращаются в микропроцессор 52 через буфер или элемент 56 обработки сигналов. Когда диск 30 расположен указанным образом, т.е. белый отражающий элемент находится под оптическим датчиком 31.2, сигнал, возвращаемый оптическим датчиком 31.2, будет иметь двоичное значение, например "1", и сигналы, возвращаемые остальными датчиками 31.1, 31.3, 31.4, будут иметь двоичное значение "0". Микропроцессор 52 регулирует ток, подаваемый на фазные обмотки 12.1 и 12.2 якоря (фиг. 5), синхронно с положением ротора 14, определяемым цифровыми комбинациями, поступающими от оптических датчиков 31. Можно использовать и другие средства обнаружения, например обнаружение положения на основании магнитного взаимодействия, переключатели на основе прямого скользящего контакта, коллектор,и т.п. Согласно предпочтительному варианту осуществления микропроцессор 52 отслеживает состояние переключателей и переменного резистора, включенного в панель 58 пользовательского интерфейса для пуска, остановки или изменения направления вращения двигателя. После пуска двигателя 10 ротор 14 первоначально совершенно не намагничен, т.е. ток I17 не течет через обмотку 17 возбуждения и разрядный диод 18. В этом случае, ротор 14 должен сначала полностью намагнититься или "зарядиться" любой из обмоток 12.1 или 12.2 якоря, которая сильно связана с обмоткой возбуждения 17 ротора (фиг. 3). Микропроцессор 52 определяет ориентацию ротора 14 относительно обмоток 12.1 и 12.2 якоря на основании сигналов, полученных от датчиков 31, и выбирает обмотку 12.1 или 12.2, которая сильно связана с обмоткой возбуждения 17 ротора, и определяет необходимое направление тока. Микропроцессор 52 переключается на необходимую пару канальных полевых униполярных МОП-транзисторов из двух "Нмостов" 40 и 42, чтобы поднять магнитную индукцию B14 в роторе 14 до необходимого значения. Ротор 14 остается неподвижным в этом процессе. После того как магнитная индукция достигнет необходимого значения, активная или заряжающаяся обмотка 12.1 или 12.2 якоря отключается. Затем ранее незадействованная обмотка якоря 12.1 или 12.2 включается для создания крутящего момента. Если-5 011737 к двигателю 10 подключена соразмерная или легкая нагрузка, он будет увеличивать обороты, и хронирование и регулировка токов будет напоминать показанные на фиг. 5. Однако если нагрузка слишком велика для двигателя 10, т.е. ротор 14 заблокирован, или нагрузка имеет высокую инерцию, первой обмотке 12.1 или 12.2 якоря придется поддерживать магнитную индукцию B14 ротора 14, тогда как во вторую обмотку придется непрерывно подавать приводной или крутящий ток, пока ротор 14 не начнет вращаться, после чего на две обмотки 12.1 и 12.2 якоря начнут попеременно подаваться крутящий ток и ток намагничивания согласно положению ротора 14. Вышеприведенное общее описание механических частей, обмоток и электронных устройств относится к предпочтительному варианту осуществления изобретения. Второй вариант осуществления можно реализовать посредством обмоток 12.1 и 12.2 якоря, которые всегда являются обмотками, создающими крутящий момент, и дополнительных обмоток 12.3 и 12.4, расположенных на статоре, которые всегда являются обмотками намагничивания. Схема этого варианта осуществления показана на фиг. 7, и соответствующие диаграммы токов показаны на фиг. 8. На диаграммах, приведенных на фиг. 5, показан пример возможных форм сигнала и хронирования токов I12.1 и I12.2 якоря. Участки тока, создающие крутящий момент, показаны, для простоты, как значения, постоянные в течение четверти периода или 90 угла механического поворота ротора 14. Эти формы волны можно изменять для оптимизации крутящего момента и снижения гармоник, например, придавать им ступенчатую, синусоидальную и т.п. формы. Участок импульсов тока намагничивания токов якоря I12.1 и I12.2 может иметь гораздо большую величину, чем участок создания крутящего момента, но ширина импульса будет в сотни раз или более уже,в результате чего среднее или среднеквадратическое значение тока намагничивания гораздо меньше, чем среднее или среднеквадратическое значение крутящего тока. Например, среднеквадратическое значение импульса намагничивания может составлять только 0,5 А для среднеквадратического значения крутящего тока 10 А. Поэтому импульс тока намагничивания создает очень малые потери на нагревание в обмотках 12 статора по сравнению с током, создающим крутящий момент. Основная часть потерь на намагничивание имеет место в обмотках 17 ротора, поскольку ток I17 в обмотке возбуждения ротора является практически непрерывным при соразмерном значении. Очевидно, что максимальный ток намагничивания в асинхронном двигателе, в общем случае, ограничивается токопроводящей способностью обмоток статора и гармоническим искажением синусоидального тока намагничивания при достижении магнитного насыщения. Максимальное намагничивание двигателя с постоянными магнитами ограничивается современным уровнем техники в отношении производства магнитов. Описанный двигатель 10 не имеет этих недостатков, и достигает гораздо более высокого намагничивания ротора и более высокого крутящего тока, при сравнимых КПД, что приводит к более высокой плотности мощности и крутящего момента для двигателей аналогичного размера. Общий КПД двигателя 10 можно динамически оптимизировать, поддерживая потери в обмотке ротора 14 равными потерям в обмотке статора 13. Микропроцессор 52 может регулировать величины крутящего тока и тока намагничивания для оптимального КПД во всем диапазоне оборотов и переменной нагрузки. Следует понимать, что примеры приведены для дополнительной иллюстрации изобретения и для помощи специалистам в данной области в понимании изобретения и не призваны чрезмерно ограничивать соответственный объем изобретения. Преимуществом является то, что общие характеристики двигателя выше, чем у синхронного двигателя, асинхронного двигателя и щеточного или бесщеточного двигателя постоянного тока, и, в то же время, он столь же прост и экономичен в производстве, как асинхронный двигатель. Дополнительным преимуществом является то, что двигатель имеет более высокие плотность мощности и КПД по сравнению с двигателями всех остальных типов. Автор изобретения считает еще одним преимуществом то, что двигатель имеет высокий пусковой крутящий момент при низком пусковом токе,что открывает перед ним применение в городском транспорте. Преимуществом является простота реализации динамической регулировки оборотов и крутящего момента при оптимальном КПД в полном диапазоне нагрузки, в полном четырехквадрантном режиме работы (двигатель, генерация, прямое и обратное вращение). ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Электрический двигатель, содержащий статор, имеющий обмотки статора, образующие по меньшей мере две фазы статора,ротор с выступающими полюсами внутри статора, причем ротор отделен от статора воздушным зазором и имеет такую форму и конфигурацию, что конфигурация выступающих полюсов задает путь с более высоким и более низким магнитным сопротивлением через зазор между ротором и статором, при этом ротор дополнительно содержит обмотку возбуждения вокруг выступающих полюсов ротора, которая образует по меньшей мере одну пару полюсов и заканчивается избирательным электрическим пере-6 011737 ключателем, который определяет электрическую целостность обмотки возбуждения, в результате чего подача обратного напряжения смещения на переключатель приводит к размыканию обмотки возбуждения, и средство управления, обеспечивающее регулирование намагничивания обмотки возбуждения путем подачи напряжения на фазу статора, связанную с обмоткой возбуждения через путь с более низким магнитным сопротивлением, в результате чего находящаяся под напряжением фаза статора, в свою очередь, обеспечивает подачу обратного напряжения смещения на переключатель посредством индукции,которое препятствует течению тока в обмотке возбуждения, но напряжение, подаваемое на фазу статора,увеличивает магнитную индукцию в роторе, после чего средство управления прекращает подачу напряжения по достижении заранее определенной магнитной индукции в роторе, при этом прекращение подачи напряжения индуцирует напряжение, обратное прямому напряжению смещения на переключателе,что позволяет току течь в обмотке возбуждения, причем ток препятствует снижению магнитной индукции в роторе, а средство управления дополнительно обеспечивает регулирование создания крутящего момента в двигателе путем подачи напряжения на другую фазу статора, не отвечающую за возбуждение обмотки возбуждения в этот момент времени, благодаря чему в любой момент одна фаза статора служит для намагничивания обмотки возбуждения, тогда как другая фаза или другие фазы отвечает(ют) за создание крутящего момента, в результате чего при вращении все фазы статора попеременно принимают на себя функцию создания крутящего момента и регулировки намагничивания обмотки возбуждения ротора. 2. Двигатель по п.1, в котором избирательный переключатель содержит разрядный диод. 3. Двигатель по п.1, в котором избирательный переключатель содержит полупроводниковое электронное устройство. 4. Двигатель по любому из пп.1-3, в котором средство управления содержит микропроцессор. 5. Двигатель по любому из пп.1-4, в котором средство управления содержит электронные переключатели для управления подачей напряжения на фазы статора. 6. Двигатель по любому из пп.1-5, в котором средство управления содержит датчики, определяющие положение ротора относительно фаз статора для регулирования моментов времени подачи напряжения на фазы. 7. Двигатель по любому из пп.1-5, в котором средство управления предназначено для определения положения ротора из характеристик тока и напряжения фаз статора. 8. Двигатель по любому из пп.1-7, в котором средство управления обеспечивает регулирование магнитной индукции в роторе в зависимости от оборотов двигателя. 9. Двигатель по любому из пп.1-8, в котором средство управления позволяет при определенных условиях использовать двигатель в качестве генератора.
МПК / Метки
МПК: H02P 25/02, H02K 19/28, H02K 19/12
Метки: электрический, двигатель
Код ссылки
<a href="https://eas.patents.su/12-11737-elektricheskijj-dvigatel.html" rel="bookmark" title="База патентов Евразийского Союза">Электрический двигатель</a>
Удлиненный электрический двигатель
Номер патента: 1410
Опубликовано: 26.02.2001
Автор: Халлундбек Йёрген
МПК: H02K 5/16
Метки: электрический, двигатель, удлиненный
Формула / Реферат:
1. Удлиненный электрический двигатель, содержащий ротор (2), разделенный на секции, по меньшей мере, одним подшипником (4), установленным между секциями, а также подшипники, установленные на каждом из концов ротора (2), причем статор выполнен в виде непрерывного пакета из тонких металлических пластин, образующих опоры (5) подшипников, в областях вокруг подшипников (4) и тонких пластин (10) из магнитного металла между подшипниками (4),...
Трехфазный двигатель переменного тока с регулируемой скоростью
Номер патента: 10412
Опубликовано: 29.08.2008
Автор: Ву Джиалин
МПК: H02K 16/00, H02K 53/00, H02K 7/00...
Метки: скоростью, регулируемой, двигатель, трехфазный, переменного, тока
Формула / Реферат:
1. Трехфазный двигатель переменного тока с регулируемой скоростью, который состоит из двигателя переменного тока и снабжен генератором обратной ЭДС, который соединен с концами трех обмоток статора двигателя переменного тока, при этом напряжение постоянного тока, выходное напряжение и выходная фаза генератора обратной ЭДС являются изменяемыми. 2. Трехфазный двигатель переменного тока с регулируемой скоростью по п.1, отличающийся тем, что...
Роторный двигатель внутреннего сгорания ю.м.лужкова
Номер патента: 4117
Опубликовано: 25.12.2003
Автор: Лужков Юрий Михайлович
МПК: F02B 55/02, F02B 53/00
Метки: ю.м.лужкова, сгорания, двигатель, внутреннего, роторный
Формула / Реферат:
1. Роторный двигатель внутреннего сгорания Лужкова Ю.М., содержащий ротор, ограниченный со стороны торцев боковыми стенками с шарнирно закрепленными на одной из них в районе наружного диаметра диска вдоль его оси вращения с возможностью поворота продольными створками, отделяющими полости, расположенные в нем по обе стороны каждой створки, друг от друга, установленный в цилиндрическом корпусе, на торцевой стенке которого размещена замкнутая...
Тяговый двигатель и приводная система
Номер патента: 2726
Опубликовано: 29.08.2002
Авторы: Бьерклунд Андерс, Шютте Торстен, Леийон Матс, Вальфридссон Ларс
МПК: H02K 3/40, B60L 9/28, H01F 27/32...
Метки: тяговый, система, двигатель, приводная
Формула / Реферат:
1. Трехфазный тяговый двигатель, содержащий обмотку, отличающийся тем, что указанная обмотка включает изоляцию, состоящую, по меньшей мере, из двух полупроводящих слоев, причем каждый слой обеспечивает получение, по существу, эквипотенциальной поверхности, и сильной изоляции между указанными полупроводящими слоями. 2. Двигатель по п.1, отличающийся тем, что он является асинхронным двигателем. 3. Двигатель по п.1, отличающийся тем, что является...
Двигатель
Номер патента: 4224
Опубликовано: 26.02.2004
Авторы: Посвенчук Иван Иванович, Солоненко Владимир Гаврилович, Посвенчук Иван Александрович, Мищенко Валентин Александрович, Брич Виктор Григорьевич
МПК: F02C 7/32, F02K 11/00
Метки: двигатель
Формула / Реферат:
1. Двигатель, содержащий выполненный в виде "тарелки" корпус с верхней и нижней цилиндрическими частями, снабженный усеченной конусной частью, расположенной между цилиндрическими частями, установленное горизонтально в верхней цилиндрической части сопло с камерой сгорания, направленное по касательной к внутренней образующей верхней цилиндрической части корпуса, компрессор, топливную систему и систему электроснабжения, отличающийся тем, что корпус...
Предыдущий патент: Система сбора сейсморазведочных данных в буровой скважине
Следующий патент: Композитный материал
Случайный патент: Терапевтический агент для диабета