Система управления двигателем для вибрационного ситового сепаратора
Формула / Реферат
1. Сепаратор для отделения твердых частиц от жидкости, включающий
раму;
сито, присоединенное к раме;
средство приведения в движение рамы по траектории линейного возвратно-поступательного перемещения;
средство приведения в движение рамы по эллиптической траектории;
средство переключения между движением рамы по эллиптической траектории и движением по траектории линейного возвратно-поступательного перемещения.
2. Сепаратор по п.1, в котором средство для приведения в движение рамы по траектории линейного возвратно-поступательного перемещения содержит первое и второе вращающиеся в противоположных направлениях средства.
3. Сепаратор по п.2, в котором первое и второе вращающиеся в противоположных направлениях средства вращаются по существу с одинаковыми скоростями.
4. Сепаратор по п.2, в котором первое вращающееся в противоположном направлении средство включает первый несбалансированный груз; и второе вращающееся в противоположном направлении средство включает второй несбалансированный груз.
5. Сепаратор по п.4, в котором массы и расположения центров масс первого и второго несбалансированного грузов, по существу, одинаковы.
6. Сепаратор по п.1, в котором средство приведения в движение рамы по эллиптической траектории включает
первое и второе вращающиеся в противоположных направлениях средства
и третье вращающееся средство.
7. Сепаратор по п.3, в котором первое и второе вращающиеся в противоположных направлениях средства вращаются, по существу, с одинаковыми скоростями.
8. Сепаратор по п.3, в котором первое вращающееся в противоположном направлении средство включает первый несбалансированный груз; и второе вращающееся в противоположном направлении средство включает второй несбалансированный груз.
9. Сепаратор по п.8, в котором массы и расположения центров масс первого и второго несбалансированных грузов, по существу, одинаковы.
10. Сепаратор по п.3, в котором центры вращения первого и второго вращающихся в противоположных направлениях средств перпендикулярны к общей плоскости; и центр вращения третьего вращающегося средства не перпендикулярен к общей плоскости.
11. Сепаратор по п.1, в котором средство приведения в движение рамы по траектории возвратно-поступательного перемещения включает первое и второе вращающиеся в противоположных направлениях средства, при этом средство для приведения в движение рамы по эллиптической траектории включает первое и второе вращающиеся в противоположных направлениях средства и третье вращающееся средство; при этом средство для переключения между движением рамы по эллиптической траектории и движением по траектории линейного возвратно-поступательного движения содержит средства для мгновенной остановки работы первого и второго вращающихся в противоположных направлениях средств и средства для мгновенной передачи обратного крутящего момента третьему вращающемуся средству.
12. Способ работы сепаратора, включающего сито, присоединенное к раме, содержащий
подачу жидкостного материала, включающего твердые частицы и жидкости, на сито;
приведение в движение рамы по траектории линейного возвратно-поступательного перемещения в первом режиме работе;
приведение в движение рамы по эллиптической траектории во втором режиме работы;
переключение между движением по траектории линейного возвратно-поступательного перемещения рамы и движением по эллиптической траектории в третьем режиме работы.
13. Способ по п.12, в котором движение рамы по траектории линейного возвратно-поступательного перемещения включает вращение первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью; и вращение второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью.
14. Способ по п.13, в котором первая и вторая скорости равны; и первое и второе направления противоположны.
15. Способ по п.13, в котором массы и расположения центров масс первого и второго несбалансированных грузов, по существу, одинаковы.
16. Способ по п.12, в котором движение рамы по эллиптической траектории включает
вращение первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью;
вращение второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью; и
вращение третьего несбалансированного груза в третьем направлении вокруг третьей оси вращения.
17. Способ по п.16, в котором первая и вторая скорости равны; и первое и второе направления противоположны.
18. Способ по п.16, в котором массы и расположения центров масс и массы первого и второго несбалансированных грузов, по существу, одинаковы.
19. Способ по п.16, в котором первая и вторая оси вращения перпендикулярны к другой плоскости, чем третья ось вращения.
20. Способ по п.12, в котором движение рамы по траектории линейного возвратно-поступательного перемещения включает вращение первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью и вращение второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью; причем движение рамы по эллиптической траектории включает вращение первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью вращение второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью, и вращение третьего несбалансированного груза в третьем направлении вокруг третьей оси вращения; при этом перемещение между движением рамы по эллиптической траектории и движением по траектории линейного возвратно-поступательного перемещения включает мгновенную остановку вращения первого и второго несбалансированных грузов и мгновенную передачу обратного крутящего момента третьему несбалансированному грузу.
21. Сепаратор, содержащий
раму;
сито, присоединенное к раме;
силовой привод для передачи линейного движения ситу, соединенному с рамой;
силовой привод для передачи эллиптического движения ситу, соединенного с рамой; и
регулятор, функционально соединенный с силовым приводом для передачи линейного возвратно-поступательного движения раме и силовой привод для передачи эллиптического движения раме для управления работой силового привода для передачи возвратно-поступательного движения раме и силовой привод для передачи эллиптического движения раме;
при этом регулятор программируется для управления в первом режиме работы, при котором управляется силовой привод для передачи линейного возвратно-поступательного движения раме;
и регулятор программируется для управления во втором режиме работы, при котором управляется силовой привод для передачи эллиптического движения раме; и
регулятор программируется для управления в третьем режиме работы, при котором силовой привод для передачи возвратно-поступательного движения раме мгновенно останавливается, а силовой привод для передачи эллиптического движения раме мгновенно реверсируется.
22. Сепаратор по п.21, в котором силовой привод для передачи линейного возвратно-поступательного движения раме включает первый силовой привод, содержащий
первый вращающийся двигатель с первым выходным валом; и
первый несбалансированный груз, соединенный с первым выходным валом; и
второй силовой привод, содержащий второй вращающийся двигатель со вторым выходным валом; и второй несбалансированный груз, соединенный со вторым выходным валом.
23. Сепаратор по п.22, в котором в первом режиме работы регулятор программируется для вращения первого выходного вала в первом направлении с первой скоростью и для вращения второго выходного вала во втором направлении со второй скоростью.
24. Сепаратор по п.23, в котором первое и второе направления противоположны; а первая и вторая скорости по существу равны.
25. Сепаратор по п.22, в котором положения центров масс и массы первого и второго несбалансированных грузов, по существу, одинаковы.
26. Сепаратор по п.22, т котором первый и второй выходные валы перпендикулярны общей плоскости.
27. Сепаратор по п.21, в котором силовой привод для передачи эллиптического движения раме включает
первый силовой привод, содержащий
первый вращающийся двигатель с первым выходным валом; и
первый несбалансированный груз, соединенный с первым выходным валом; и
второй силовой привод, содержащий второй вращающийся двигатель со вторым выходным валом; и
второй несбалансированный груз, соединенный со вторым выходным валом; и
третий силовой привод, содержащий третий вращающийся двигатель с третьим выходным валом; и
третий несбалансированный груз, соединенный с третьим выходным валом.
28. Сепаратор по п.27, в котором во втором режиме работы регулятор программируется для вращения первого выходного вала в первом направлении с первой скоростью для вращения второго выходного вала во втором направлении со второй скоростью и для вращения третьего выходного вала.
29. Сепаратор по п.28, в котором первое и второе направления противоположны; а первая и вторая скорости, по существу, равны.
30. Сепаратор по п.27, в котором положения центров масс и массы первого и второго несбалансированных грузов, по существу, одинаковы.
31. Сепаратор по п.27, в котором первый и второй выходные валы перпендикулярны общей плоскости.
32. Сепаратор по п.31, в котором третий выходной вал не перпендикулярен общей плоскости.
33. Сепаратор для отделения жидкости от твердых частиц, содержащий
раму;
сито, соединенное с рамой;
первое и второе вращающиеся в противоположных направлениях средства для приведения в движение рамы;
вращающееся средство приведения в движение рамы; и
средство управления первым и вторым вращающимися в противоположных направлениях средствами приведения в движение рамы по траектории линейного возвратно-поступательного перемещения;
средство управления первым и вторым вращающимися в противоположных направлениях средствами и вращающимся средством для приведения в движение рамы по эллиптической траектории;
средство управления для переключения между управлением первым и вторым вращающимися в противоположных направлениях средствами и вращающимся средством для приведения в движение рамы по эллиптической траектории и управлением первым и вторым вращающимися в противоположных направлениях средствами для приведения в движение рамы по линейной траектории возвратно-поступательного перемещения.
34. Способ управления сепаратором, содержащим сито, соединенное с рамой, включающий
подачу жидкого материала, включающего твердые частицы и жидкости, на сито;
приведение в движение рамы по линейной траектории возвратно-поступательного перемещения в первом режиме работы посредством вращения первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью; и
вращения второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью;
при этом расположения центров масс и массы первого и второго несбалансированного грузов, по существу, одинаковы;
первая и вторая скорости равны; а первое и второе направления противоположны;
приведение в движение рамы по эллиптической траектории во втором режиме работы посредством
вращения первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью;
вращения второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью; и
вращения третьего несбалансированного груза вокруг третьей оси вращения;
при этом первая и вторая оси вращения перпендикулярны к общей плоскости, а
третья ось вращения не перпендикулярна к общей плоскости, и
переключение между движением рамы по эллиптической траектории во втором режиме работы и движением рамы по линейной траектории возвратно-поступательного перемещения в первом режиме работы посредством
мгновенной остановки вращения первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью;
мгновенной остановки вращения второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью; и
мгновенного приложения обратного момента к третьему несбалансированному грузу.
35. Сепаратор, содержащий
раму;
сито, присоединенное к раме;
линейный силовой привод, соединенный с рамой, содержащий первый вращающийся двигатель, соединенный с рамой, содержащий первый вращающийся вал;
первый несбалансированный груз, соединенный с первым вращающимся валом;
второй вращающийся двигатель, соединенный с рамой, содержащий второй вращающийся вал; и
второй несбалансированный груз, соединенный со вторым вращающимся валом;
при этом расположения центров масс и массы первого и второго несбалансированного грузов, по существу, одинаковы; и
первый и второй вращающиеся валы, по существу, параллельны и перпендикулярны одной и той же плоскости;
эллиптический силовой привод, соединенный с рамой, содержащий
линейный силовой привод;
третий вращающийся двигатель, соединенный с рамой, содержащий третий вращающийся вал; и
третий несбалансированный груз, соединенный с третьим вращающимся валом;
при этом третий вращающийся вал не перпендикулярен той же плоскости, что и первый и второй вращающиеся валы; и
регулятор, функционально соединенный с линейным и эллиптическим силовыми приводами для управления работой линейного и эллиптического силовых приводов;
причем регулятор программируется для работы в первом режиме работы, в котором первый и второй вращающиеся валы вращаются, по существу, с одной и той же скоростью в противоположных направлениях;
регулятор программируется для работы во втором режиме работы, в котором первый и второй вращающиеся валы вращаются, по существу, с одной и той же скоростью в противоположных направлениях при вращении третьего вращающегося вала; и
регулятор программируется для работы в третьем режиме работы, в котором первый и второй вращающиеся валы мгновенно останавливаются и к третьему вращающемуся валу мгновенно прикладывается обратный момент.
Текст
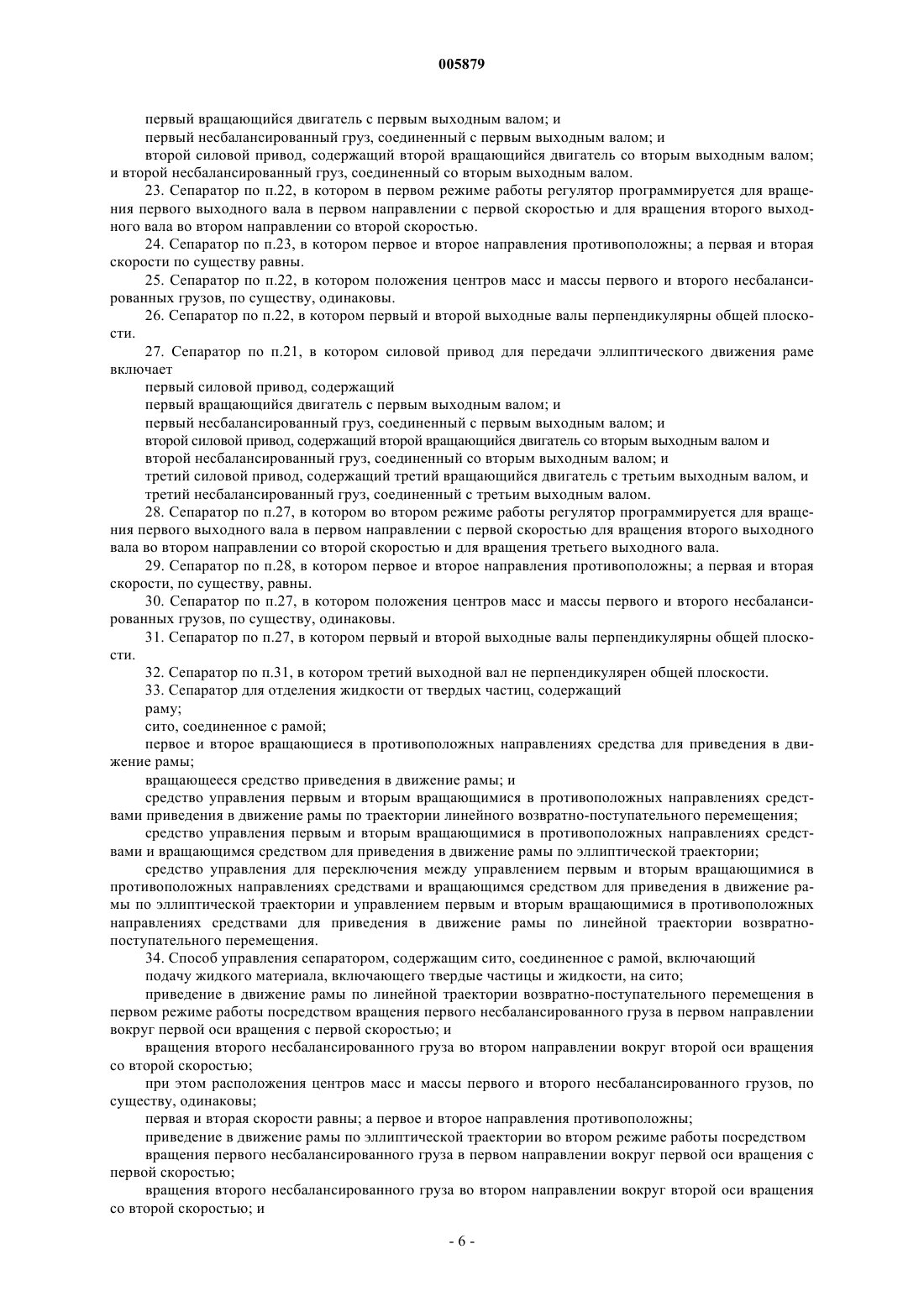
005879 Область техники Изобретение в основном относится к ситовому сепаратору, и, в частности, к вибрационному ситовому сепаратору, а также к способу работы этого сепаратора. В соответствии с одним из вариантов воплощения изобретения сепаратор используется для отделения твердых частиц от жидкости. Сущность изобретения В соответствии с иллюстративным вариантом воплощения изобретения устройство включает в себя раму, сито, присоединенное к раме; средство приведения в движение рамы по траектории линейного возвратно-поступательного перемещения; средство приведения в движение рамы по эллиптической траектории; средство переключения между движением рамы по эллиптической траектории и движением по траектории линейного возвратно-поступательного перемещения. Предпочтительно средство для приведения в движение рамы по траектории линейного возвратно-поступательного перемещения содержит первое и второе вращающиеся в противоположных направлениях средства, и более предпочтительно первое вращающееся в противоположном направлении средство включает первый несбалансированный груз; и второе вращающееся в противоположном направлении средство включает второй несбалансированный груз. Предпочтительно массы и расположения центров масс первого и второго несбалансированного грузов по существу одинаковы. Средство для приведения в движение рамы по эллиптической траектории включает первое и второе вращающиеся в противоположных направлениях средства и третье вращающееся средство. Предпочтительно центры вращения первого и второго вращающихся в противоположных направлениях средств перпендикулярны к общей плоскости; и центр вращения третьего вращающегося средства не перпендикулярен к общей плоскости. В еще одном предпочтительном варианте воплощения изобретения средство приведения в движение рамы по траектории возвратнопоступательного перемещения включает первое и второе вращающиеся в противоположных направлениях средства, при этом средство для приведения в движение рамы по эллиптической траектории включает первое и второе вращающиеся в противоположных направлениях средства и третье вращающееся средство; при этом средство для переключения между движением рамы по эллиптической траектории и движением по траектории линейного возвратно-поступательного движения содержит средства для мгновенной остановки работы первого и второго вращающихся в противоположных направлениях средств и средства для мгновенной передачи обратного крутящего момента третьему вращающемуся средству. В соответствии с другим иллюстративным вариантом воплощения изобретения сепаратор содержит раму; сито, присоединенное к раме; силовой привод для передачи линейного движения ситу, соединенному с рамой; силовой привод для передачи эллиптического движения ситу, соединенного с рамой; и регулятор, функционально соединенный с силовым приводом для передачи линейного возвратнопоступательного движения раме и силовой привод для передачи эллиптического движения раме для управления работой силового привода для передачи возвратно-поступательного движения раме и силовой привод для передачи эллиптического движения раме. Предпочтительно регулятор программируется для управления в первом режиме работы, при котором управляется силовой привод для передачи линейного возвратно-поступательного движения раме. Наиболее предпочтительно, регулятор программируется для управления во втором режиме работы, при котором управляется силовой привод для передачи эллиптического движения раме. Дополнительно, регулятор программируется для работы в третьем режиме работы, в котором первый и второй вращающиеся валы мгновенно останавливаются и к третьему вращающемуся валу мгновенно прикладывается обратный момент. Краткое описание чертежей Фиг. 1 а - изометрический вид в сборке варианта воплощения устройства вибрационного ситового сепаратора; фиг. 1b - местное поперечное сечение и схематический вид силового привода и регулятора устройства по фиг. 1 а; фиг. 2 - блок-схема, изображающая вариант воплощения работы устройства по фиг. 1 а и 1b; фиг. 3 а - вид сбоку вращающихся в противоположных направлениях силовых приводов устройства по фиг. 1 а и 1b; фиг. 3b - схематичное изображение сил, приложенных к раме устройства по фиг. 1 а и 1b во время работы вращающихся в противоположных направлениях силовых приводов; фиг. 4 - вид сбоку вспомогательного вращающегося силового привода устройства по фиг. 1 а и 1b; фиг. 5 - схематичное изображение варианта воплощения системы управления для управления работой устройства по фиг. 1 а и 1b; фиг. 6 а-6 с - блок-схема, отображающая вариант воплощения работы системы управления по фиг. 5. Описание предпочтительных вариантов воплощения изобретения На фиг. 1 а и 1b, ссылочная позиция 10 относится, в целом, к устройству вибрационного ситового сепаратора, который состоит из рамы или основания 12, которое включает нижнюю стенку 14 с отверстием 16, пару боковых стенок 18 и 20, торцевую стенку 22 и поперечный опорный элемент 24, закрепленный между боковыми стенками. Силовой привод 26 для передачи движения раме 12 соединен с опор-1 005879 ным элементом 24, состоящим из корпуса 28, соединенного с опорным элементом, который служит опорой и соединен с вращающимся двигателем 30, имеющим вращающийся вал 32, противоположные концы которого выходят за пределы корпуса. Два по существу одинаковых несбалансированных груза 34 и 36 расположены на противоположных концах вращающегося вала 30. Силовые приводы 38 и 40, соответственно, для передачи движения раме 12 также соединены с опорным элементом 24, и включают корпуса 42 и 44, соответственно, присоединенные к опорному элементу, который служит опорой и соединен с вращающимися двигателями 46 и 48, соответственно,имеющими вращающие валы 50 и 52, противоположные концы которых выходят за пределы корпусов. Пары по существу одинаковых несбалансированных грузов 54 и 56 и 58 и 60, соответственно, присоединены к противоположным концам вращающихся валов 50 и 52. В приведенном примере варианта воплощения вращающиеся валы 50 и 52 расположены по существу параллельно и перпендикулярно общей плоскости, а размеры, форма и масса несбалансированных грузов 54, 56, 58 и 60 по существу одинакова. В приведенном варианте воплощения, вращающийся вал 32 расположен перпендикулярно к другой плоскости, чем вращающиеся валы 50, 52. Вращающиеся двигатели 30, 46 и 48 функционально соединены с регулятором 62, который создает движущую силу и управляет работой вращающихся двигателей. Сито 64 размещено внутри рамы 12 и приспособлено для жесткого соединения с нижней стенкой 14 при помощи обычных механических крепежных деталей. При работе устройства 10, как показано на фиг. 2, регулятор 62 может выполнять программу управления движением 100, в которой пользователь может осуществить запуск устройства на этапе 102. Затем,на этапе 104, пользователь может выбрать линейное или эллиптическое движение для передачи раме 12 устройства 10. Если пользователь на этапе 104 выбирает линейное движение, тогда регулятор может управлять силовыми приводами 38 и 40, для передачи движения раме 12 на этапе 106. Как показано на фиг. 3 а, во время работы силовых приводов 38 и 40, для передачи движения раме 12, несбалансированные грузы 54 и 58 вращаются двигателями 46 и 48, соответственно, вокруг осей вращения 108 а и 108b, в противоположных направлениях, 108 с и 108d, по существу с равными скоростями вращения при положениях вращения центров масс 108 е и 108f, по существу являющихся зеркальными отражениями друг друга. При вращении несбалансированных грузов 54 и 58 вокруг осей вращения 108 а и 108b, возникают центробежные силы 108g и 108h, которые направлены от центров масс 108 е и 108f, соответственно, несбалансированных грузов 54 и 58, в направлениях, перпендикулярных векторам из центров вращения к соответствующим центрам масс. Результирующие центробежные силы 108g и 108h, возникающие при вращении несбалансированных грузов 54 и 58 вокруг осей вращения 108 а и 108b, сообщают возвратное линейное движение раме 12 устройства 10. В частности, как показано на фиг. 3b центробежные силы 108g и 108h включают горизонтальные составляющие 108gх и 108hx, соответственно, и вертикальные составляющие 108gy и 108hy,соответственно. Поскольку направление и скорость вращения несбалансированных грузов 54 и 58 противоположны и равны, горизонтальные составляющие 108gх и 108hx взаимно исключаются. В результате,единственные силы, действующие на раму 12 устройства из-за вращения несбалансированных грузов 54 и 58 вокруг осей вращения 108 а и 108b, это сумма вертикальных составляющих сил 108gy и 108hy. Так как значения сил, действующих в вертикальном направлении 108gy и 108hy, изменяются от максимального положительного значения вертикальной составляющей силы до максимального отрицательного значения вертикальной составляющей силы во время вращения несбалансированных грузов 54 и 58 вокруг осей вращения 108 а и 108b, результирующее линейное движение, передаваемое раме 12 устройства,является возвратно-поступательным линейным движением. Таким образом, комбинация силовых приводов 38 и 40 позволяет силовому приводу передавать линейное движение раме 12 устройства. В приведенном варианте воплощения во время работы положения вращения и центробежные силы, возникающие при вращении несбалансированных грузов 54 и 56 и 58 и 60 вокруг осей вращения 108 а и 108b, соответственно, по существу одинаковы. Если пользователь выбирает эллиптическое движение на этапе 104, тогда регулятор может одновременно управлять силовым приводом 26 для передачи движения раме 12 и силовым приводам 38 и 40 для передачи движения раме на этапе 108. Как показано на фиг. 4, во время работы силового привода 26 для передачи движения раме 12, несбалансированный груз 34 вращается при помощи двигателя 30 вокруг оси вращения 106 а. Вращение несбалансированного груза 34 вокруг оси вращения 106 а вызывает возникновение центробежной силы 106b, направленной от центра масс 106 с несбалансированного груза 34 в направлении, перпендикулярном вектору, направленному от центра вращения к центру масс. В приведенном варианте воплощения, на этапе 108, положения вращения, скорости и центробежные силы, возникающие во время вращения несбалансированных грузов 34 и 36 вокруг оси вращения 106 с, по существу, одинаковы. Результирующие центробежные силы, возникающие во время вращения несбалансированных грузов 34 и 36 вокруг оси-2 005879 вращения 106 с, сообщили бы круговое движение раме 12 устройства 10, если бы силовой привод 26 работал один. Поскольку вращающийся вал 32 силового привода 26 расположен перпендикулярно к плоскости,иной чем вращающиеся валы 50 и 52 силовых приводов 38 и 40, одновременная работа силовых приводов и создаваемые силы, как описано выше, приводят к эллиптическому движению, передаваемому раме 12 устройства 10. Таким образом, комбинация силовых приводов 26, 38 и 40 обеспечивают привод для передачи эллиптического движения раме 12. Если пользователь решит прервать работу программы 100 на этапе 110, тогда работа программы закончится на этапе 112. В приводимом варианте воплощения, во время работы устройства 10 с использованием программы управления движением 100, жидкостной материал, включающий твердые частицы, выпускается на сито 64. В приводимом примере варианта воплощения выпуск жидкостного материала на сито 64 осуществляется по существу как описано в патентной заявке США 09/836,974, поданной 18 апреля 2001 года,описание которой приводится здесь в качестве ссылки. Настоящим способом отделение твердых частиц от жидкости в жидкостном материале усиливается посредством движения, передаваемого раме 12 и ситу 64. В приводимом варианте воплощения, движение рамы 12 и сита 64 по эллиптической траектории удерживает твердые частицы на сите в течение более длительного периода времени, таким образом позволяя извлечь из жидкостного материала больше жидкости, тем самым обеспечивая отделение более сухих твердых частиц. Как видно на фиг. 5, вариант воплощения системы управления 200 для управления работой двигателей 30, 46 и 48, устройства вибрационного ситового сепаратора 10 включает стартер 202 двигателя прямого хода и стартер 204 двигателя обратного хода, которые присоединены к двигателю 30, причем стартер 206 двигателя прямого хода соединен с двигателем 46, а стартер 208 двигателя прямого хода соединен с двигателем 48. Как будет понятно специалисту в данной области техники, стартеры двигателей могут применяться для приведения в рабочее состояние и вращения выходящего вала двигателя в предварительно заданном направлении благодаря тому, что обмотки двигателя сообщают крутящий момент выходному валу двигателя. Регулятор 210 соединен со стартером 202 двигателя прямого хода, стартером 204 двигателя обратного хода, стартером 206 двигателя прямого хода и стартером 208 двигателя прямого хода для управления работой стартеров двигателей прямого и обратного хода, а переключатель режима работы 212 функционально соединен с регулятором 210 для предоставления пользователю возможности выбирать режим работы системы управления 200. Во время работы системы управления 200, как показано на фиг. 6 а-6 с, регулятор 210 может приводить в исполнение программу управления движением 300, в которой пользователь может инициировать работу системы управления на этапе 302. Затем пользователь может выбрать линейное или эллиптическое движение для передачи раме 12 устройства 10 на этапе 304. Если пользователь выбирает линейное движение на этапе 304, то регулятор 210 может управлять двигателями 46 и 48 для передачи линейного движения раме 12 устройства 10 на этапе 306. В частности,на этапе 306 регулятор 210 может управлять стартерами 206 и 208 двигателей прямого хода для управления двигателями 46, 48, соответственно, в одинаковых и противоположных направлениях вращения для передачи линейного движения раме 12 устройства 10. Как вариант, если пользователь выбирает эллиптическое движение на этапе 304, то регулятор 210 может управлять двигателями 30, 46 и 48 для передачи эллиптического движения раме 12 устройства 10 на этапе 308. В частности, на этапе 308 регулятор 210 может управлять стартерами 202, 206 и 208 двигателей прямого хода для управления двигателем 30 и управления двигателями 46 и 48, соответственно, в одинаковых и противоположных направлениях вращения для передачи эллиптического движения раме 12 устройства 10. Если пользователь выбирает продолжение работы на этапе 310, то пользователь может изменить режим работы на этапе 312. Если пользователь хочет изменить режим работы с линейного на эллиптический на этапе 314, то регулятор 210 управляет стартерами 202, 206, 208 двигателей прямого хода для управления двигателем 30 и управления двигателями 46 и 48, соответственно, в одинаковых и противоположных направлениях вращения для передачи эллиптического движения раме 12 устройства 10 на этапе 316. Как вариант, если пользователь хочет изменить режим работы с эллиптического на линейный на этапе 318, то регулятор 210 может остановить работу стартеров 206 и 208 двигателей прямого хода, чтобы таким образом остановить работу двигателей 46 и 48, соответственно, и остановить вращение двигателя 30 при помощи остановки работы стартера 202 двигателя прямого хода и работу стартера 204 двигателя обратного хода на этапе 320 для сообщения обратного крутящего момента, чтобы таким образом по существу остановить вращение двигателя 30 на этапе 320. После истечения заданного периода времени на этапе 322, после которого вращение двигателя 30 было по существу остановлено, регулятор 210 может затем остановить работу стартера 204 двигателя обратного хода и управлять стартерами 206 и 208 двигателей прямого хода для управления двигателями 46 и 48, соответственно, в одинаковых и противоположных направлениях вращения для передачи линейного движения раме 12 устройства 110 на этапе 324.-3 005879 Таким образом, в программе управления движением 300, при изменении режима работы от эллиптического к линейному обеспечивается мгновенное изменение направления вращения двигателя 30 и мгновенная остановка работы двигателей 46 и 48. Настоящим способом, механическая энергия, генерируемая в результате вращения двигателей 46 и 48, которые в противном случае вызывали бы продолжение вращения двигателя 30, преодолена. В приведенном варианте воплощения период времени, в течение которого вращение двигателей 46 и 48 останавливается и направление вращения двигателя 30 изменено на этапах 320 и 322, может быть установлен эмпирически. Кроме того, в приведенном варианте воплощения, при мгновенном изменении направления вращения двигателя 30 на этапах 320 и 322 мгновенно передается обратное напряжение двигателю 30, который в свою очередь передает обратный крутящий момент на вращающийся вал 32 и на несбалансированные грузы 34 и 36. В результате в приведенном варианте воплощения вращение вала 32 и несбалансированных грузов 34 и 36 по существу остановлено. Настоящие варианты воплощения изобретения дают ряд преимуществ. Например, возможность работать в линейном или эллиптическом режиме работы без изменения структуры или механической перекомпоновки устройства обеспечивает эффективность, надежность и рентабельную систему для двух режимов работы. Очевидно, что в вышеупомянутом устройстве могут быть сделаны изменения, не выходя за объем изобретения. Например, силовые приводы 26, 38 и 40 для передачи движения раме 12 устройства 10 могут включать один и более несбалансированных грузов. Кроме того, регуляторы 62 и 210 могут включать программируемый регулятор и/или жестко-проводную схему управления. Хотя проиллюстрированные варианты воплощения изобретения были приведены и описаны, в вышеизложенном описании предусматривается возможность выполнения множества различных модификаций, изменений и дополнений. В некоторых случаях некоторые функции настоящего изобретения могут использоваться без соответствующего применения прочих функций. Соответственно, допустимо, чтобы приложенные формулы изобретения толковались в широком смысле и в соответствии с сущностью изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Сепаратор для отделения твердых частиц от жидкости, включающий: раму; сито, присоединенное к раме; средство приведения в движение рамы по траектории линейного возвратно-поступательного перемещения; средство приведения в движение рамы по эллиптической траектории; средство переключения между движением рамы по эллиптической траектории и движением по траектории линейного возвратно-поступательного перемещения. 2. Сепаратор по п.1, в котором средство для приведения в движение рамы по траектории линейного возвратно-поступательного перемещения содержит первое и второе вращающиеся в противоположных направлениях средства. 3. Сепаратор по п.2, в котором первое и второе вращающиеся в противоположных направлениях средства вращаются по существу с одинаковыми скоростями. 4. Сепаратор по п.2, в котором первое вращающееся в противоположном направлении средство включает первый несбалансированный груз; и второе вращающееся в противоположном направлении средство включает второй несбалансированный груз. 5. Сепаратор по п.4, в котором массы и расположения центров масс первого и второго несбалансированного грузов, по существу, одинаковы. 6. Сепаратор по п.1, в котором средство приведения в движение рамы по эллиптической траектории включает первое и второе вращающиеся в противоположных направлениях средства и третье вращающееся средство. 7. Сепаратор по п.3, в котором первое и второе вращающиеся в противоположных направлениях средства вращаются, по существу, с одинаковыми скоростями. 8. Сепаратор по п.3, в котором первое вращающееся в противоположном направлении средство включает первый несбалансированный груз; и второе вращающееся в противоположном направлении средство включает второй несбалансированный груз. 9. Сепаратор по п.8, в котором массы и расположения центров масс первого и второго несбалансированных грузов, по существу, одинаковы. 10. Сепаратор по п.3, в котором центры вращения первого и второго вращающихся в противоположных направлениях средств перпендикулярны к общей плоскости; и центр вращения третьего вращающегося средства не перпендикулярен к общей плоскости. 11. Сепаратор по п.1, в котором средство приведения в движение рамы по траектории возвратнопоступательного перемещения включает первое и второе вращающиеся в противоположных направлени-4 005879 ях средства, при этом средство для приведения в движение рамы по эллиптической траектории включает первое и второе вращающиеся в противоположных направлениях средства и третье вращающееся средство; при этом средство для переключения между движением рамы по эллиптической траектории и движением по траектории линейного возвратно-поступательного движения содержит средства для мгновенной остановки работы первого и второго вращающихся в противоположных направлениях средств и средства для мгновенной передачи обратного крутящего момента третьему вращающемуся средству. 12. Способ работы сепаратора, включающего сито, присоединенное к раме, содержащий подачу жидкостного материала, включающего твердые частицы и жидкости, на сито; приведение в движение рамы по траектории линейного возвратно-поступательного перемещения в первом режиме работе; приведение в движение рамы по эллиптической траектории во втором режиме работы; переключение между движением по траектории линейного возвратно-поступательного перемещения рамы и движением по эллиптической траектории в третьем режиме работы. 13. Способ по п.12, в котором движение рамы по траектории линейного возвратно-поступательного перемещения включает вращение первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью; и вращение второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью. 14. Способ по п.13, в котором первая и вторая скорости равны; и первое и второе направления противоположны. 15. Способ по п.13, в котором массы и расположения центров масс первого и второго несбалансированных грузов, по существу, одинаковы. 16. Способ по п.12, в котором движение рамы по эллиптической траектории включает вращение первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью; вращение второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью; и вращение третьего несбалансированного груза в третьем направлении вокруг третьей оси вращения. 17. Способ по п.16, в котором первая и вторая скорости равны; и первое и второе направления противоположны. 18. Способ по п.16, в котором массы и расположения центров масс и массы первого и второго несбалансированных грузов, по существу, одинаковы. 19. Способ по п.16, в котором первая и вторая оси вращения перпендикулярны к другой плоскости,чем третья ось вращения. 20. Способ по п.12, в котором движение рамы по траектории линейного возвратно-поступательного перемещения включает вращение первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью и вращение второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью; причем движение рамы по эллиптической траектории включает вращение первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью, вращение второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью и вращение третьего несбалансированного груза в третьем направлении вокруг третьей оси вращения; при этом перемещение между движением рамы по эллиптической траектории и движением по траектории линейного возвратно-поступательного перемещения включает мгновенную остановку вращения первого и второго несбалансированных грузов и мгновенную передачу обратного крутящего момента третьему несбалансированному грузу. 21. Сепаратор, содержащий раму; сито, присоединенное к раме; силовой привод для передачи линейного движения ситу, соединенному с рамой; силовой привод для передачи эллиптического движения ситу, соединенного с рамой; и регулятор, функционально соединенный с силовым приводом для передачи линейного возвратнопоступательного движения раме и силовой привод для передачи эллиптического движения раме для управления работой силового привода для передачи возвратно-поступательного движения раме и силовой привод для передачи эллиптического движения раме; при этом регулятор программируется для управления в первом режиме работы, при котором управляется силовой привод для передачи линейного возвратно-поступательного движения раме; и регулятор программируется для управления во втором режиме работы, при котором управляется силовой привод для передачи эллиптического движения раме; и регулятор программируется для управления в третьем режиме работы, при котором силовой привод для передачи возвратно-поступательного движения раме мгновенно останавливается, а силовой привод для передачи эллиптического движения раме мгновенно реверсируется. 22. Сепаратор по п.21, в котором силовой привод для передачи линейного возвратнопоступательного движения раме включает первый силовой привод, содержащий-5 005879 первый вращающийся двигатель с первым выходным валом; и первый несбалансированный груз, соединенный с первым выходным валом; и второй силовой привод, содержащий второй вращающийся двигатель со вторым выходным валом; и второй несбалансированный груз, соединенный со вторым выходным валом. 23. Сепаратор по п.22, в котором в первом режиме работы регулятор программируется для вращения первого выходного вала в первом направлении с первой скоростью и для вращения второго выходного вала во втором направлении со второй скоростью. 24. Сепаратор по п.23, в котором первое и второе направления противоположны; а первая и вторая скорости по существу равны. 25. Сепаратор по п.22, в котором положения центров масс и массы первого и второго несбалансированных грузов, по существу, одинаковы. 26. Сепаратор по п.22, в котором первый и второй выходные валы перпендикулярны общей плоскости. 27. Сепаратор по п.21, в котором силовой привод для передачи эллиптического движения раме включает первый силовой привод, содержащий первый вращающийся двигатель с первым выходным валом; и первый несбалансированный груз, соединенный с первым выходным валом; и второй силовой привод, содержащий второй вращающийся двигатель со вторым выходным валом и второй несбалансированный груз, соединенный со вторым выходным валом; и третий силовой привод, содержащий третий вращающийся двигатель с третьим выходным валом, и третий несбалансированный груз, соединенный с третьим выходным валом. 28. Сепаратор по п.27, в котором во втором режиме работы регулятор программируется для вращения первого выходного вала в первом направлении с первой скоростью для вращения второго выходного вала во втором направлении со второй скоростью и для вращения третьего выходного вала. 29. Сепаратор по п.28, в котором первое и второе направления противоположны; а первая и вторая скорости, по существу, равны. 30. Сепаратор по п.27, в котором положения центров масс и массы первого и второго несбалансированных грузов, по существу, одинаковы. 31. Сепаратор по п.27, в котором первый и второй выходные валы перпендикулярны общей плоскости. 32. Сепаратор по п.31, в котором третий выходной вал не перпендикулярен общей плоскости. 33. Сепаратор для отделения жидкости от твердых частиц, содержащий раму; сито, соединенное с рамой; первое и второе вращающиеся в противоположных направлениях средства для приведения в движение рамы; вращающееся средство приведения в движение рамы; и средство управления первым и вторым вращающимися в противоположных направлениях средствами приведения в движение рамы по траектории линейного возвратно-поступательного перемещения; средство управления первым и вторым вращающимися в противоположных направлениях средствами и вращающимся средством для приведения в движение рамы по эллиптической траектории; средство управления для переключения между управлением первым и вторым вращающимися в противоположных направлениях средствами и вращающимся средством для приведения в движение рамы по эллиптической траектории и управлением первым и вторым вращающимися в противоположных направлениях средствами для приведения в движение рамы по линейной траектории возвратнопоступательного перемещения. 34. Способ управления сепаратором, содержащим сито, соединенное с рамой, включающий подачу жидкого материала, включающего твердые частицы и жидкости, на сито; приведение в движение рамы по линейной траектории возвратно-поступательного перемещения в первом режиме работы посредством вращения первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью; и вращения второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью; при этом расположения центров масс и массы первого и второго несбалансированного грузов, по существу, одинаковы; первая и вторая скорости равны; а первое и второе направления противоположны; приведение в движение рамы по эллиптической траектории во втором режиме работы посредством вращения первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью; вращения второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью; и-6 005879 вращения третьего несбалансированного груза вокруг третьей оси вращения; при этом первая и вторая оси вращения перпендикулярны к общей плоскости, а третья ось вращения не перпендикулярна к общей плоскости, и переключение между движением рамы по эллиптической траектории во втором режиме работы и движением рамы по линейной траектории возвратно-поступательного перемещения в первом режиме работы посредством мгновенной остановки вращения первого несбалансированного груза в первом направлении вокруг первой оси вращения с первой скоростью; мгновенной остановки вращения второго несбалансированного груза во втором направлении вокруг второй оси вращения со второй скоростью; и мгновенного приложения обратного момента к третьему несбалансированному грузу. 35. Сепаратор, содержащий раму; сито, присоединенное к раме; линейный силовой привод, соединенный с рамой, содержащий первый вращающийся двигатель, соединенный с рамой, содержащий первый вращающийся вал; первый несбалансированный груз, соединенный с первым вращающимся валом; второй вращающийся двигатель, соединенный с рамой, содержащий второй вращающийся вал; и второй несбалансированный груз, соединенный со вторым вращающимся валом; при этом расположения центров масс и массы первого и второго несбалансированного грузов, по существу, одинаковы; и первый и второй вращающиеся валы по существу параллельны и перпендикулярны одной и той же плоскости; эллиптический силовой привод, соединенный с рамой, содержащий линейный силовой привод; третий вращающийся двигатель, соединенный с рамой, содержащий третий вращающийся вал; и третий несбалансированный груз, соединенный с третьим вращающимся валом; при этом третий вращающийся вал не перпендикулярен той же плоскости, что и первый и второй вращающиеся валы; и регулятор, функционально соединенный с линейным и эллиптическим силовыми приводами для управления работой линейного и эллиптического силовых приводов; причем регулятор программируется для работы в первом режиме работы, в котором первый и второй вращающиеся валы вращаются по существу с одной и той же скоростью в противоположных направлениях; регулятор программируется для работы во втором режиме работы, в котором первый и второй вращающиеся валы вращаются по существу с одной и той же скоростью в противоположных направлениях при вращении третьего вращающегося вала; и регулятор программируется для работы в третьем режиме работы, в котором первый и второй вращающиеся валы мгновенно останавливаются и к третьему вращающемуся валу мгновенно прикладывается обратный момент.
МПК / Метки
МПК: B07B 1/44
Метки: сепаратора, двигателем, ситового, управления, вибрационного, система
Код ссылки
<a href="https://eas.patents.su/11-5879-sistema-upravleniya-dvigatelem-dlya-vibracionnogo-sitovogo-separatora.html" rel="bookmark" title="База патентов Евразийского Союза">Система управления двигателем для вибрационного ситового сепаратора</a>
Устройство для многорежимного управления трехфазным шаговым двигателем
Номер патента: 3109
Опубликовано: 27.02.2003
Авторы: Арутюнян Ваган, Мурадян Ашот
МПК: H02P 8/00, G05B 19/02
Метки: трехфазным, двигателем, управления, шаговым, многорежимного, устройство
Формула / Реферат:
Устройство для многорежимного управления трехфазным шаговым двигателем, содержащее первый и второй источники питания силовой части с противоположными полярностями, источник питания логической части, четырехразрядный реверсивный двоичный счетчик импульсов со входными шинами тактирования, реверсирования и установки в исходное состояние, первую группу из трех мультиплексоров, соединенных своими выходами с управляющими входами усилителей мощности...
Оптоэлектронная система управления и способ управления
Номер патента: 3571
Опубликовано: 26.06.2003
Авторы: Макиннес Джеймс, Леггет Найджел Дерек
МПК: G08C 23/06, H03K 17/78
Метки: оптоэлектронная, система, управления, способ
Формула / Реферат:
1. Система управления, предназначенная для приведения в действие множества электротехнических устройств и имеющая импульсный источник света, выдающий световые импульсы с варьируемой частотой, которые поступают во множество управляющих шлюзов, каждый из которых при его освещении световыми импульсами с запускающей частотой, при которой происходит срабатывание соответствующего устройства, обеспечивает подачу на такое устройство рабочего напряжения,...
Дефлектор для спирального сепаратора и способ спиральной сепарации
Номер патента: 5731
Опубликовано: 30.06.2005
Автор: Палмер Марк Кеннет
МПК: B03B 5/52
Метки: спиральной, сепаратора, дефлектор, спирального, сепарации, способ
Формула / Реферат:
1. Дефлектор, выполненный с возможностью крепления к спиральному сепаратору и предназначенный для захвата и переадресации контролируемой порции текущего потока материала, проходящего через указанный спиральный сепаратор, включающий в себя средство крепления, предназначенное для крепления указанного дефлектора к указанному спиральному сепаратору; участок захвата с конфигурацией, обеспечивающей ему плавучесть и возможность захватывать порцию...
Система управления зенитного ракетного комплекса малой дальности
Номер патента: 2202
Опубликовано: 28.02.2002
Авторы: Парфенов Александр Иванович, Дризе Иосиф Матвеевич, Чибисов Станислав Иванович, Чирков Валерий Иванович, Барсукова Софья Алексеевна, Ботвинов Алексей Кузьмич, Хворых Юрий Васильевич, Толкачев Михаил Александрович, Абрамов Владимир Иванович, Осипов Валентин Валентинович, Павлов Евгений Яковлевич, Фомин Роберт Анатольевич, Безверхов Михаил Алексеевич, Сосков Юрий Александрович, Ефремов Вениамин Павлович, Беркович Геннадий Михайлович, Корчагин Сергей Николаевич, Войсковский Евгений Иосифович, Морозов Валерий Вениаминович
МПК: G01S 13/72
Метки: малой, система, комплекса, управления, ракетного, зенитного, дальности
Формула / Реферат:
Система управления зенитного ракетного комплекса малой дальности, включающая размещенные на едином самоходном шасси или в транспортном контейнере средства обнаружения с радиолокатором кругового обзора, радиолокационный запросчик опознавания, средства сопровождения и точного измерения координат цели и ракеты, средства отображения информации, аппаратуру предстартовой подготовки ракеты и производства пуска, радиоответчик, автопилот ракеты,...
Система и способ управления регулируемыми трансмиссиями
Номер патента: 4382
Опубликовано: 29.04.2004
Автор: Ферреро Пьетро
МПК: B62M 25/08, B60K 41/06
Метки: регулируемыми, управления, способ, трансмиссиями, система
Формула / Реферат:
1. Система для управления регулируемой трансмиссией, установленной на транспортном средстве и связанной с приводом для изменения передаточного числа, и рабочим средством для приложения тягового усилия к трансмиссии периодическим действием заданной частоты, содержащая первые сенсорные средства, чувствительные к тяговому усилию, для генерирования первого сигнала, вторые сенсорные средства, чувствительные к скорости движения транспортного средства,...
Предыдущий патент: Способ изготовления конструктивного элемента, усиленного волокном
Следующий патент: Клапан разности давления
Случайный патент: Способ и устройство для определения удельного сопротивления формации, через которую проходит обсаженная скважина