Система и способ управления регулируемыми трансмиссиями
Формула / Реферат
1. Система для управления регулируемой трансмиссией, установленной на транспортном средстве и связанной с приводом для изменения передаточного числа, и рабочим средством для приложения тягового усилия к трансмиссии периодическим действием заданной частоты, содержащая первые сенсорные средства, чувствительные к тяговому усилию, для генерирования первого сигнала, вторые сенсорные средства, чувствительные к скорости движения транспортного средства, для генерирования второго сигнала, и средство управления приводом в зависимости от первого и второго сигналов, отличающаяся тем, что она содержит третьи сенсорные средства, чувствительные к частоте приложения тягового усилия, для генерирования третьего сигнала, при этом средство управления выполнено с возможностью определения по меньшей мере по первому и второму сигналам контрольного сигнала частоты приложения усилия и последующего сравнения его с третьим сигналом, формируя при этом сигнал отклонения, а также с возможностью воздействия на привод, изменяющий передаточное число так, чтобы минимизировать сигнал отклонения.
2. Система по п.1, отличающаяся тем, что первое сенсорное средство содержит средство для измерения силы воздействия на педали, прилагаемой к педальному коленчатому рычагу велосипеда, и второе сенсорное средство содержит датчик для определения скорости движения велосипеда вперед, и средство управления является средством управления, способным воздействовать по меньшей мере на один узел переключения передач, установленный на велосипеде.
3. Система по п.1 или 2, отличающаяся тем, что средство управления выполнено с возможностью определения сигнала контрольной частоты также в зависимости от третьего сигнала.
4. Система по любому одному из предшествующих пп.1-3, отличающаяся тем, что средство управления содержит первый функциональный модуль, чувствительный к первому сигналу и приспособленный классифицировать первый сигнал в зависимости от соответствующей первой степени родственности, второй функциональный модуль, чувствительный ко второму сигналу и приспособленный классифицировать второй сигнал в зависимости от соответствующей второй степени родственности, третий функциональный модуль для применения правил, чувствительный к соответствующим значениям первой и второй степеней родственности и способный определять значение контрольной частоты по значениям, дифференцированным в зависимости от значений первой и второй степеней родственности.
5. Система по п.4, отличающаяся тем, что она содержит по меньшей мере один модуль управления, работающий избирательно для избирательного изменения по меньшей мере одного из критериев присвоения атрибутов первой степени родственности первым функциональным модулем, присвоения атрибутов второй степени родственности вторым функциональным модулем и правила определения значения контрольной частоты третьим функциональным модулем по степеням родственности, присвоенным первым функциональным модулем и вторым функциональным модулем, и первому и второму сигналам.
6. Система по п.4 или 5, отличающаяся тем, что первый, второй и третий функциональные модули работают в соответствии с нечеткой логикой.
7. Система по п.5, отличающаяся тем, что модуль управления содержит по меньшей мере один из следующих элементов: первый функциональный модуль управления для избирательного изменения критерия присвоения атрибутов первой и второй степеням родственности первым и вторым функциональными модулями в зависимости от уровня спортивной подготовки велосипедиста, второй функциональный модуль управления для избирательного изменения критерия присвоения атрибутов первой и второй степеням родственности первым и вторым функциональными модулями в зависимости от разных вариантов стратегии движения велосипеда и третий функциональный модуль управления для избирательного изменения правил определения значения контрольной частоты, заданного третьим функциональным модулем.
8. Система по любому одному из предшествующих пп.1-7, отличающаяся тем, что средство управления включает функцию задержки действия привода на период времени предварительно заданной длительности, начинающийся от предшествующего воздействия, выполненного средством управления, на привод для изменения передаточного числа.
9. Система по п.8, отличающаяся тем, что длительность интервала времени избирательно изменяется.
10. Способ управления регулируемой трансмиссией, установленной на транспортном средстве и связанной с приводом для изменения передаточного числа и рабочим средством для приложения тягового усилия к трансмиссии периодическим действием заданной частоты, содержащий следующие операции:
определение тягового усилия и генерирование соответствующего первого сигнала,
определение скорости движения транспортного средства и генерирование соответствующего второго сигнала и
управление вторым приводом в зависимости от первого и второго сигналов,
отличающийся тем, что дополнительно содержит следующие операции:
определение частоты приложения тягового усилия и генерирование соответствующего третьего сигнала,
определение по меньшей мере по первому и второму сигналам контрольного сигнала частоты приложения тягового усилия,
сравнение контрольного сигнала и третьего сигнала для определения соответствующего сигнала отклонения и
управление приводом, изменяющим передаточное число так, чтобы минимизировать сигнал отклонения.
11. Способ по п.10, отличающийся тем, что он содержит следующие операции:
генерирование первого сигнала как сигнала, показывающего усилие воздействия на педали, прилагаемого к педальному коленчатому рычагу велосипеда,
генерирование второго сигнала как сигнала, показывающего скорость при движении самого велосипеда вперед, и
управление приводом по меньшей мере одним узлом переключения передач, установленным на велосипеде.
12. Способ по п.10 или 11, отличающийся тем, что он содержит операцию определения значения контрольной частоты также в зависимости от третьего сигнала.
13. Способ по любому одному из пп.10-12, отличающийся тем, что он содержит следующие операции:
классификацию первого сигнала в зависимости от соответствующей первой степени родственности,
классификацию второго сигнала в зависимости от соответствующей второй степени родственности и
определение значения контрольной частоты по значениям, дифференцированным в зависимости от значений первой и второй степеней родственности.
14. Способ по п.13, отличающийся тем, что он содержит операции избирательного изменения по меньшей мере одного из критериев присваивания атрибутов первой степени родственности, присваивания атрибутов второй степени родственности и правила определения значения контрольной частоты по степеням родственности, присвоенным первому и второму сигналам.
15. Способ по п.13 или 14, отличающийся тем, что критерии присвоения атрибутов и правила определения основаны на нечеткой логике.
16. Способ по п.14, отличающийся тем, что он содержит по меньшей мере одну из следующих операций:
избирательное изменение критерия присвоения атрибутов первой и второй степеням родственности в зависимости от уровня спортивной подготовки велосипедиста,
избирательное изменение критерия присвоения атрибутов первой и второй степеням родственности в зависимости от разных вариантов стратегии движения на велосипеде и
избирательное изменение правил определения значения контрольной частоты по степеням родственности.
17. Способ по любому одному из предшествующих пп.10-16, отличающийся тем, что он содержит операцию задержки воздействия на привод на период времени предварительно заданной длительности, начинающийся от предшествующего воздействия на привод для изменения передаточного числа.
18. Способ по п.17, отличающийся тем, что длительность периода времени избирательно изменяется.

Текст
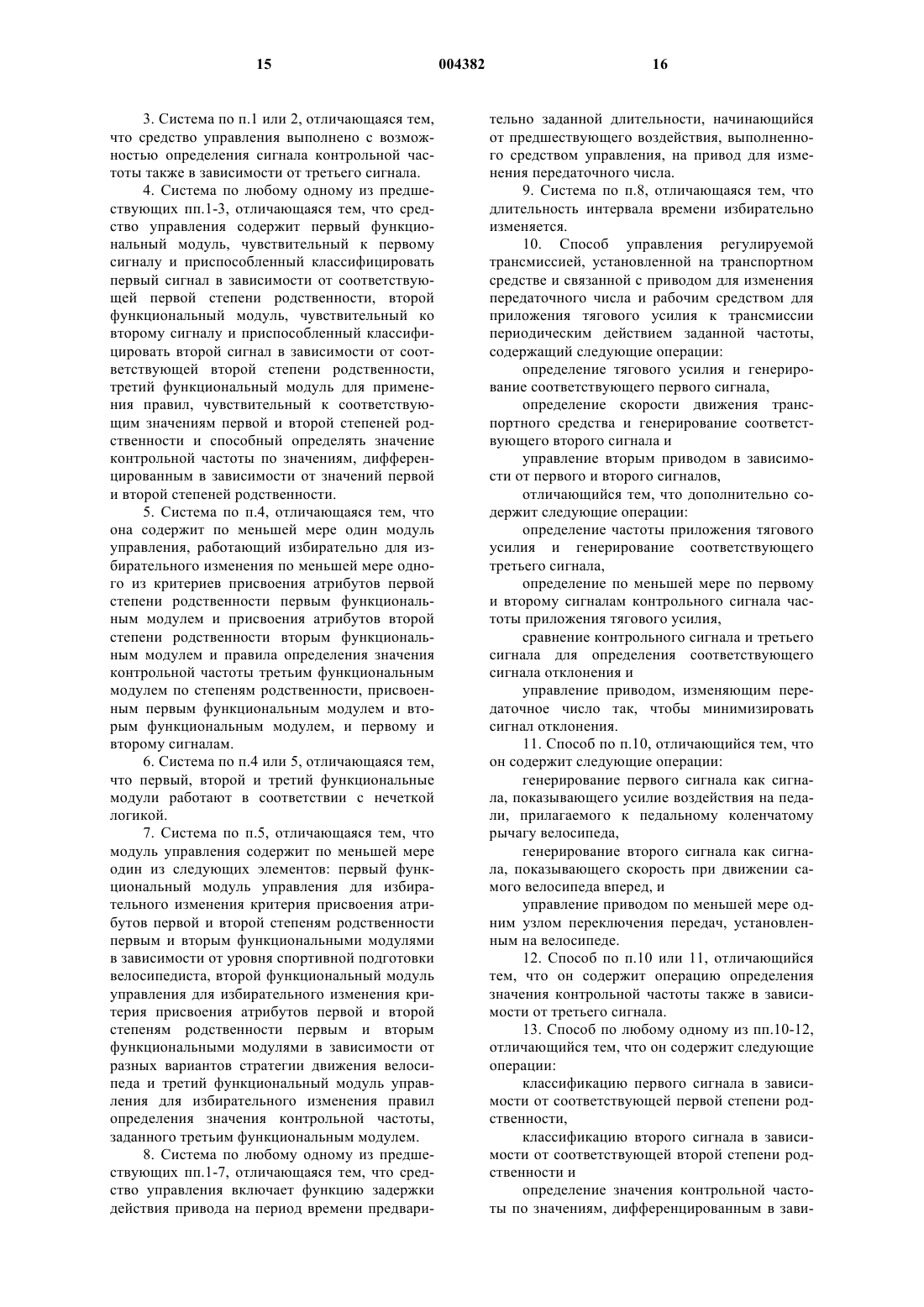
1 Настоящее изобретение относится к проблеме управления регулируемыми трансмиссиями. Типичным примером трансмиссии этого типа, на которую для упрощения нижеследующего описания будут делаться ссылки, является велосипедная трансмиссия. В этой связи способ и устройство для автоматического управления передаточным числом трансмиссии велосипеда так, чтобы автоматически определять оптимальное передаточное число в зависимости от усилия нажатия на педали или силы, известны из документа ЕР-А-0831021, который взят за модель для преамбул пп.1 и 10 формулы изобретения. К этой теме обращаются многие другие патентные документы, такие как, например, USA-5059158, US-A-5538477, US-A-5356348, USA-5569104 и US-A-5728017, в которых можно видеть, что управление может осуществляться применительно либо к заднему сбрасывателю,либо к переднему сбрасывателю, либо к обоим сбрасывателям трансмиссии спортивного велосипеда. Задачей настоящего изобретения является усовершенствование систем для управления передаточным числом в регулируемых трансмиссиях, в частности, с точки зрения оптимизации взаимодействия между устройством,имеющим такую трансмиссию, и оператором,использующим устройство. Согласно настоящему изобретению эта задача решается при помощи системы, имеющей специфические характеристики, изложенные в нижеследующей формуле изобретения. Изобретение также относится к соответствующему способу работы. Применение изобретения особенно выгодно в велосипедной области техники и, в частности, в области соревновательной езды на велосипедах. Теперь изобретение будет описано только на не вносящем ограничений примере со ссылками на прилагаемые чертежи, на которых фиг. 1 схематически изображает применение системы, соответствующей изобретению, в конструкции педального транспортного средства, такого как велосипед; фиг. 2 изображает конструкцию системы,соответствующей изобретению, схематически в форме блок-схемы; фиг. 3 и 4 - общий принцип работы системы, соответствующей изобретению, в деталях на двух последовательных уровнях; фиг. 5 изображает работу системы, соответствующей изобретению, в форме схемы последовательности операций, и фиг. 6 и 7 изображают дополнительные графики, показывающие критерии (аффинные преобразования) работы системы. На фиг. 1 устройство, имеющее регулируемую трансмиссию, в целом обозначено но 004382 2 мером 1. В показанном варианте осуществления изобретения устройство представлено велосипедом, например, таким как спортивный велосипед. Наряду с деталями, которые обычно составляют велосипед этого типа (которые описывать здесь подробно очевидно нет необходимости), велосипед 1 оснащен следующими средствами: узлом 2 переключения передач с электрическим приводом, как показано здесь, соединенным с задним сбрасывателем велосипеда 1 (в возможных вариантах осуществления изобретения такой узел переключения передач мог бы в качестве альтернативы или дополнительно применяться с передним сбрасывателем велосипеда, если он его имеет); узел переключения передач, о котором идет речь, таким образом, может изменять положение, в котором цепь велосипеда (приводимая педальным коленчатым рычагом 3, при помощи которого велосипедист прилагает тяговое усилие к трансмиссии) взаимодействует с зацеплением со звездочками, соединенными со ступицей заднего колеса велосипеда, в соответствии с сигналом управления,средством 4 управления, главным элементом которого, предпочтительно является микропроцессор, вырабатывающий сигнал управления, и комплектом датчиков 5-7, которые чувствительны к соответствующим параметрам использования велосипеда и могут генерировать соответствующие сигналы, принимаемые и обрабатываемые средством 4 управления; ими, в целом, являются датчик 5, который может выявлять усилие на педали или усилие, прилагаемое к педалям велосипедистом (то есть тяговое усилие), датчик 6, который чувствителен к скорости движения велосипеда 1 вперед (в общих чертах, к частоте или скорости работы устройства, представленного здесь велосипедом 1), а также датчик 7, который чувствителен к частоте вращения педалей, то есть частоте периодического действия, которым велосипедист прилагает тяговое усилие при помощи педального коленчатого рычага 3. Хотя теоретически они являются отдельными, разные датчики, о которых идет речь,фактически могут комбинироваться друг с другом и/или с другими компонентами системы. Например, датчик 7, который определяет частоту вращения педалей, может преимущественно комбинироваться с датчиком 5, который определяет усилие, прилагаемое при вращении педалей. Вновь следует отметить, что все указанные выше различные компоненты могут считаться известными как таковые (как показано в патентных документах известного уровня техники,указанных во вводной части этого описания) и/или в настоящее время доступными на рынке. Например, узел 2 переключения передач, кото 3 рый преимущественно может использоваться в контексте изобретения, представлен узлом переключения передач, поставляемым компаниейMAVIC под маркой ZMS 800. Блок-схема на фиг. 2 схематически показывает на уровне общей структуры системы устройство соединений между разными описанными выше элементами и средством 4 управления, которое принимает сигналы, генерируемые датчиками 5-7 (также определенные ниже как первый, второй и третий сигналы) и которое воздействует на узел 2 переключения передач для изменения передаточного числа узла 2 переключения передач в зависимости от операции обработки, описанной более подробно ниже. Комплект датчиков этого типа (который может выдавать три сигнала в цифровой форме) поставляется компанией Ingenieurburo Schoberer под товарным знаком SRM TRAININGSYSTEM. Другие функциональные блоки, обозначенные номерами 8 и 10, показывают, что способ, соответствующий изобретению, позволяет пользователю влиять на работу системы, в частности, относительно двух базовых факторов, то есть: образа действия, которым средство 4 управления интерпретирует или классифицирует (как будет дополнительно описано ниже) значения сигналов, принятых от датчиков 5-7, и логической последовательности обработки данных, выполняемой средством 4 управления с целью воздействия на узел 2 переключения передач. В частности, в предпочтительном в настоящее время варианте осуществления изобретения, система, соответствующая изобретению,посредством соответствующих избирательных управляющих вмешательств позволяет принимать во внимание следующие факторы: уровень подготовки и физической пригодности велосипедиста (модуль 8),выбор велосипедистом стратегии обычной езды или гонки (модуль 9) и, в целом,правила, которым пользователь намерен следовать в автоматическом управлении функцией управления трансмиссией (модуль 10). Основные принципы изобретения Перед началом подробного описания возможного варианта осуществления изобретения представляется полезным коротко описать основные принципы, на которых основано изобретение. Это будет сделано с конкретными ссылками на его возможное применение в области велосипедной техники. Является фактом, что для заданных внешних условий (физические характеристики, спортивная подготовка, тип велосипеда, уклон дороги и атмосферные условия, например, встречный или попутный ветер и т.д.) максимальное усилие, которое велосипедист может передавать велосипеду, достигается в области очень точной 4 частоты вращения педалей, которая определяется скоростью вращения (количеством оборотов в минуту), придаваемого педальному коленчатому рычагу. Вследствие того факта, что при заданной определенной преодолеваемой нагрузке всегда существует оптимальное согласование сопротивления между преодолеваемой нагрузкой и частотой так, чтобы максимизировать производимую мощность, то есть для максимизации эффективности. Эти наблюдения подтверждаются многими научными работами, например, такими как:(1995), "Human-Powered Vehicles", (стр. 35-37),IL: Human Kinetics. Для заданной преодолеваемой нагрузки велосипед позволяет достигать состояния согласования сопротивления и, следовательно, может подбираться оптимальная частота посредством изменения передаточных чисел. На практике велосипедист сравним с высокоэффективным двигателем, который может развивать наилучшую производительность в форме производимой мощности в довольно узкой полосе частот вращения педалей (или темпов). Благодаря изменению передаточных чисел велосипедист может удерживать частоту вращения педалей в этой полосе наибольшей эффективности. На практике, если частота слишком низка (ниже 6075 об./мин.), увеличивается риск повреждения мышц, тогда как если она слишком высока (90120 об./мин.), велосипедист начинает страдать от недостатка кислорода. Посредством прямого схематического представления (но это не следует рассматривать как указывающее на точную аналогию функциональным блокам), критерий максимизации выходной мощности благодаря способности велосипедиста всегда вращать педали с оптимальной частотой может быть представлен в форме схемы управления, показанной на фиг. 3. На этой схеме блок 1 обозначает велосипедную систему в целом. Рабочие условия системы установлены (относительно передаточного числа) тем, что можно определять обычной терминологией в теории автоматического управления как "привод" (представленный в конкретном примере узлом 2 переключения передач). Система управления, показанная схематически в форме средства 4 управления, может, таким образом, воздействовать на привод 2 (в зависимости от сигналов датчиков, как лучше показано в 5 схеме на фиг. 4, на которую будут сделаны ссылки ниже) так, чтобы осуществлять работу с обратной связью, направленную на минимизацию отклонения или рассогласования "е", которое может возникать между теоретической контрольной частотой CR и фактической частотой,определенной по соответствующему сигналу,генерированному датчиком 7. На практике, когда сигнал (е) рассогласования превышает предварительно заданное,возможно переменное, пороговое значение, это вызывает приведение в действие привода 2 таким образом, чтобы изменять передаточное число так, чтобы приводить сигнал (е) к значению, которое ниже предварительно заданного порогового значения. На практике (выражаясь намеренно схематическими терминами) передаточное число (понимаемое как соотношение между частотой вращения ведомой оси и частотой вращения ведущей оси) уменьшается, когда частота вращения педалей имеет тенденцию снижения (например, из-за того, что велосипедист движется вверх по склону или против ветра) и увеличивается, когда частота имеет тенденцию повышения (например, из-за того, что велосипедист движется вниз по склону или при попутном ветре). С этой последней точки зрения способ, соответствующий настоящему изобретению, может осуществляться либо с использованием специфического критерия, описанного дополнительно ниже со ссылками на фиг. 5 и следующие далее фигуры (в основном с использованием так называемой экспертной системы, предпочтительно, "нечеткого" типа), или, в менее предпочтительных вариантах осуществления изобретения, системами выбора, которые выполняют операцию управления (воздействие на узел переключения передач/привод 2 так, чтобы сводить к минимуму рассогласование между контрольной частотой CR и фактической частотой вращения педалей) с использованием механизмов разных типов для обработки сигналов,например, типа, описанного в разных документах, перечисленных во вводной части настоящего описания. Подробное описание варианта осуществления настоящего изобретения Важный элемент изобретения состоит в том, что оно не предусматривает работу на основе значения контрольной частоты CR, которая является фиксированной или предварительно заданной (возможно избирательно), а вместо этого система, соответствующая изобретению,определяет значение контрольной частоты CR(в соответствии по существу с адаптивным критерием, предпочтительна, применяемым в реальном масштабе времени или по существу реальном масштабе времени) посредством выведения контрольной частоты по истинным параметрам (усилие при вращении педалей, скорость движения вперед, фактическая частота враще 004382 6 ния педалей и т.д.), которые характеризуют взаимодействие между велосипедистом и велосипедом в данный момент. Все это происходит в соответствии с критерием вмешательства, который может определяться и управляться избирательно пользователем. Важность этого фактора может быть понятнее, если отметить, что контрольная частотаCR не является статичной и определяемой заранее, даже если избирательно. Фактически она зависит, с одной стороны, от преодолеваемой нагрузки (которая, в свою очередь, зависит от различных факторов) и, с другой стороны, от дополнительных внешних факторов. Например, зависимость контрольной частоты CR от преодолеваемой нагрузки может быть выражена как зависимость от таких факторов, как: вращающий момент, прилагаемый к педальному коленчатому рычагу (вращающий момент, требуемый для поддержания постоянной скорости, изменяется при изменениях характеристик трассы), и скорость (аэродинамическое сопротивление, которое является функцией квадрата скорости, возрастает при возрастании скорости). Зависимость от других факторов, с другой стороны, включает, например, такие факторы,как: стратегия гонки: велосипедист может решать вращать педали для гонки, для спринта,или просто для монотонного перемещения согласно критерию, который отражает его волю и,следовательно, в целом предсказуемое поведение, проецируемое на будущее и не основанное на параметрах, которые выявлены и/или могут выявляться в прошлом или в настоящее время, и уровень подготовки велосипедиста; чем лучше велосипедист натренирован и подготовлен, тем выше будет его способность поддерживать высокие частоты или меньшие частоты, но с большим производимым усилием. Средство 4 управления предпочтительно содержит так называемую экспертную систему,работающую в соответствии с нечеткой логикой. Нечеткая логика и соответствующие исполнительные механизмы известны как таковые, также как и преимущества, которые этот тип логики вносит в решение комплексных проблем, которое основано в большей степени на эмпирических заключениях по результатам эксперимента и моделирования, чем на математическом моделировании проблемы. Для получения общей информации по этим предметам можно обратиться, например, к работе Mohammad JAMSIDI, Nader VADIEE и(1993) - IL: Prentice Hall. Схема последовательности операций на фиг. 5 показывает последовательность операций от первоначальной операции 100 до завершающей операции 101, которую должно повторять 7 средство 4 управления для осуществления автоматического управления приводом, представленным узлом 2 переключения передач, и, следовательно, передаточными числами велосипеда. Однако упоминание автоматической работы не означает, что велосипед 1, оснащенный системой, соответствующей изобретению, обязательно должен предусматривать только автоматическую работу. Как и с известными системами, велосипедист фактически может исключить работу системы таким образом, чтобы он мог работать с трансмиссионным узлом или трансмиссионными узлами вручную обычным способом (следует вновь отметить, что способ,соответствующий изобретению, может применяться только с одним или с обоими сбрасывателями, обычно применяемыми на спортивном велосипеде), или предусматривать какую-либо форму полуавтоматической работы. В любом случае эти способы работы и полного или частичного выключения системы таковы, что они не требуют подробного описания здесь. Для сосредоточения внимания на автоматической работе следует вновь отметить, что последовательность операций между операциями 100 и 101 может выполняться с периодическим темпом и/или с определенной частотой в зависимости от конкретных требований использования. В частности, частота повторения операций, описанных ниже, не должна быть очень высокой, поскольку даже на кратковременных этапах гонки изменения в велосипедной системе 1 происходят довольно медленно по времени по сравнению со скоростью обработки обычным электронным устройством. Указанная выше последовательность управления может повторяться, например, с интервалом около 1 с. Работа узла 2 переключения передач для изменения передаточного числа, предпочтительно предусматривает использование определенного эффекта фильтрации нижних частот. Это необходимо для предотвращения преобразования мгновенных изменений одного или более параметров, используемых экспертной системой 41, в нежелательное немедленное изменение передаточного числа: например, может происходить внезапное изменение усилия, прилагаемого к педалям, вследствие того факта, что велосипедист поднялся с седла при старте, то есть "встал" на педали; прежде всего, указанное выше изменение может иметь разный знак в зависимости от мгновенного углового положения педального коленчатого рычага в момент,когда велосипедист начинает вращать педали стоя. Кроме того, представляется преимущественным в любом случае предотвращать изменения передаточного числа, возможно с противоположными знаками, происходящие в быстрой последовательности. Описание работы экспертной системы 41 будет дано ниже, исходя из предположения, что 8 экспертная система принимает на ее входе исключительно сигналы, соответствующие силе вращения педалей или усилию (датчик 5) и скорости велосипеда (датчик 6). Этот выбор продиктован как необходимостью упрощения описания, так и соображением, что специалист в данной области техники, знакомый с компоновкой и конструкцией экспертных систем, несомненно не встретит трудностей при включении в работу системы также третьего параметра(фактической частоты вращения педалей). Однако этот последний параметр может использоваться экспертной системой исключительно для выполнения в узле, обозначенном номером 42 на фиг. 4, сравнения этого параметра с контрольной частотой CR, определенной экспертной системой на основе сигналов, поступающих от датчиков 5 и 6, и для вычисления текущего передаточного числа 2, если это недоступно другими средствами. Другими словами, экспертная система 41 может принимать во внимание сигнал, соответствующий фактической частоте вращения педалей по меньшей мере двумя разными способами, то есть: на основе способа, показанного на фиг. 5,посредством выявления сигнала, соответствующего контрольной частоте CR, просто на основе сигнала усилия, прилагаемого к педалям, и сигнала скорости, с использованием сигнала, соответствующего фактической частоте вращения педалей, поступающего от датчика 7, только для генерирования сигнала рассогласования (сигнал е), используемого для управления узлом 2 переключения передач, и на основе варианта, не показанного подробно, также с использованием сигнала, относящегося к фактической частоте вращения педалей, для определения контрольной частотыCR. В целом, экспертная система 41, работающая в соответствии с нечеткой логикой, преобразует значения входных переменных (например, сигналов, считываемых от датчиков 5, 6,возможно, 7) в лингвистическое описание для выработки стратегии управления, содержащейся в наборе логических правил. Результат затем преобразуется обратно в точные и однозначные выходные данные. Как показано в схеме последовательности операций на фиг. 5, операции, обозначенные номерами 102 и 103, означают первоначальные операции, в ходе которых система считывает сигналы, поступающие от датчика 5 (усилие,прилагаемое к педалям) и датчика 6 (скорость) соответственно. Эти сигналы предпочтительно являются сигналами, уже преобразованными в цифровую форму заблаговременно на выходах соответствующих датчиков, как в случае с датчиками SRM, уже упомянутыми выше. Если это другой случай, преобразование выполняется известным способом в средстве 4 управления. 9 В ходе последующих операций 104, 105 экспертная система преобразует каждую из двух переменных, считанных как входные сигналы, в нечеткие значения, то есть в лингвистические значения, такие как "высокое", "среднее", "низкое", " средне-высокое" и т.д. Для выполнения этого присваивания атрибутов она использует предписанные преобразования, которые отражают степень родственности нечетких переменных различным нечетким значениям (аффинные преобразования). Аффинное преобразование относительно скорости предпочтительно имеет кривую типа,показанного на фиг. 6, где ось абсцисс соответствует значению скорости (датчик 6), выраженному в км/ч. Следует отметить, что существует 5 нечетких значений (лингвистические значения: В = низкое, MB = средне-низкое, М = среднее, МА = средне-высокое, А = высокое). Аффинное преобразование, относящееся к вращающему моменту, имеет кривую типа, показанного на фиг. 7, где ось абсцисс соответствует значению вращающего момента, воздействующего на педали (усилия, воздействующего на педали - датчик 5), выраженного в Нм. Существует 4 нечетких значения (В, MB, М, А). Вновь следует отметить, что операции, показанные прямоугольниками 102-105, показаны как выполняемые теоретически способом параллельной обработки для каждого входного параметра, поскольку это представление прежде всего более понятно. Специалисту будет ясно,что такой же результат может быть получен последовательной обработкой. Также следует отметить, что схема последовательности операций, показанная на фиг. 5,поясняет, что можно вмешиваться в операции 104, 105 при помощи команд, вводимых пользователем через интерфейсные модули 8, 9 и 10. Эти интерфейсы на практике могут быть включены в интерфейс 11 пользователя, например,такой как клавиатура или аналоговый модуль управления, расположенный, например, на руле(фиг. 1) в местоположении, легко доступном для велосипедиста. Логика присваивания лингвистических значений данным, соответствующим сигналам,поступающим от датчиков 5 и 6, может на практике меняться в зависимости от различных параметров, избирательно заданных в интерфейсные модули 8, 9, 10. Например, уровень спортивной подготовки велосипедиста (модуль 8) может означать, что скорость или усилие, прилагаемое к педалям,которые считаются высокими для спортсменалюбителя или развлекающегося велосипедиста,могут рассматриваться по-другому (например,как средне-высокие, средние или даже низкие) для профессионального велосипедиста. Точно таким же образом, относительно функции модуля 9, которому назначена роль определения стратегии гонки, очевидно, что 10 значения скорости и/или усилия, прилагаемого к педалям, рассматриваемые как высокие для этапа преодоления большого расстояния даже в ходе велосипедной гонки, могут считаться низкими или даже очень низкими для спринта или гонок с хронометражем. Указанное выше таким же образом относится к модулю 10, который заведует общим заданием правил работы экспертной системы. В этом случае, вмешательство может, например,заключаться во вмешательстве в работу для задания описанных выше аффинных преобразований посредством исключения или добавления аффинных преобразований; и спортсменлюбитель или развлекающийся велосипедист обычно будет меньше заинтересован в очень тонком и дифференцированном задании указанных выше преобразований, чем профессионал,для которого потребность в достижении непрерывной близкой адаптации велосипедной системы к его физическому состоянию может быть очень настоятельной и решающей. Прямоугольник, обозначенный номером 106, схематически представляет набор функций экспертной системы, предназначенных для определения контрольной частоты как результата присваивания атрибутов аффинными преобразованиями, выполненными в ходе операций 104 и 105. В возможном варианте (который известен как таковой специалистам в конструировании этих систем и, таким образом, не требует подробного описания здесь) критерий применения указанных выше правил может рассматриваться как тип сканирования матрицы данных, например, двухмерной матрицы, в которой строки определяются аффинными преобразованиями,относящимися к скорости, и колонки определяются аффинными преобразованиями, относящимися к усилию, прилагаемому к педалям. Относительно примеров, данных на фиг. 6 и 7(которые предусматривают пять и четыре нечетких значения соответственно), может быть 5 х 4=20 или более соответствующих правил. Если также присутствует параметр, относящийся к фактической частоте вращения педалей,соответствующие аффинные преобразования определяют третье измерение структуры матрицы (которое в любом случае выполняется нечеткой логикой и, следовательно, соответствующими блоками, определяемыми вероятностными функциями). Правила, выполняемые в блоке 106, могут быть записаны в явной форме следующим образом:A) если скорость низкая и вращающий момент высокий, то контрольная частота низкаяB) если скорость средне-низкая и вращающий момент высокий, то контрольная частота средне-низкаяC) если скорость низкая и вращающий момент средний, то контрольная частота средненизкаяD) если скорость средне-низкая и вращающий момент средний, то контрольная частота средне-низкая и т.д. В показателях значения контрольной частоты CR выходные нечеткие значения могут быть следующими: значение контрольной частоты низкое = 68 об./мин значение контрольной частоты средненизкое = 78 об./мин значение контрольной частоты среднее = 86 об./мин значение контрольной частоты средневысокое = 92 об./мин значение контрольной частоты высокое = 95 об./мин. Естественно, как хорошо известно специалистам в области создания нечетких систем, система может также делать заключение, что в определенных условиях "среднее" значение должно присваиваться контрольной частоте CR на уровне 25%, и"низкое" на уровне 90%. Как хорошо известно специалистам в области нечеткой логики, каждое нечеткое значение независимо от других и, таким образом, оно полностью допустимо для системы для достижения заключений, указанных выше, то есть с суммой нечетких значений, отличной от 100%. Будет также понятно, что в соответствии с известным, как таковым, критерием, набор функций, обозначенный схематически блоком 106, может быть переменным в зависимости от параметров, заданных пользователем, воздействующим на интерфейс 11: это, в частности,применяется в отношении возможности модификации правил, которые определяют присваивание атрибутов значению контрольной частоты в зависимости от аффинных преобразований,соответствующих входным параметрам, так,чтобы иметь возможность выполнять разные наборы правил. Также можно предусматривать, в соответствии с известным критерием, чтобы экспертная система 41 была способна хранить указанный выше набор правил или, возможно, несколько наборов правил для использования в разных условиях в зависимости от циклов обучения, то есть предусматривать этап тренировки системы,в ходе которого велосипедист воздействует на трансмиссию, изменяя передаточные числа посредством прямого воздействия велосипедистом(выражение его воли) в зависимости от различных условий езды, при этом система обучается соответствующим правилам, впоследствии применяя их автоматически, когда этот критерий работы впоследствии будет избран. Указанный выше механизм управления и,в частности, механизм обучения может выполняться с использованием конфигураций, в на 004382 12 стоящее время известных как нейронные сети,которые, как хорошо известно, могут применяться для реализации (и для обучения) рабочих данных и условий, которые являются совершенно феноменологическими и не могут быть выражены в форме математической модели, в частности, алгоритмического типа. В ходе операции 107 экспертная система 41 выполняет механизм обратного преобразования, известный как "получение решения способами нечеткой логики", когда нечеткие значения выходной переменной комбинируются для получения точного значения параметра контрольной частоты CR. Описанный выше рабочий критерий может быть лучше понят на основе практического примера, описанного ниже. Практический пример В данный момент измерены значение скорости (датчик 6) = 17 км/ч, и значение вращающего момента (датчик 5) = 37 Нм. Из первого аффинного преобразования обнаружено, что низкая скорость = 0,7777 средне-низкая скорость = 0,2222 средняя скорость = 0 средне-высокая скорость = 0 высокая скорость = 0 Из второго аффинного преобразования обнаружено, что низкий вращающий момент = 0 средне-низкий вращающий момент = 0 средний вращающий момент = 0,3125 высокий вращающий момент = 0,6875 По правилу А)низкая контрольная частота = минимум (0,7777, 0,6875) = 0,6875 По правилу В)средне-низкая контрольная частота = минимум (0,2222, 0,6875) = 0,2222 По правилу С)средне-низкая контрольная частота = минимум (0,7777, 0,3125) = 0,3125 По правилу D)средне-низкая контрольная частота = минимум (0,2222, 0,3125) = 0,2222 Таким образом, комбинация результата правила А с ним самим дает: низкая контрольная частота = 0,6875. При комбинировании результатов правил В), С), D)средне-низкая контрольная частота= максимум (0,2222, 0,3125, 0,2222) = 0,3125. Здесь необходимо применить получение решения способом нечеткой логики, начиная от нечетких выходных значений Контрольная частота: низкая = 0,6875 средне-низкая = 0,3125 средняя = 0 средне-высокая = 0 высокая = 0 Например, если 13 то следует, что Возвращаясь вновь к схеме последовательности операций, показанной на фиг. 5, отметим, что в ходе операции 108 таким образом полученное значение контрольной частоты сравнивается (что также показано более конкретно узлом 42, который фактически включен в экспертную систему 41) со значением частоты вращения педалей, выдаваемым датчиком 7. Если соответствующий модуль отклонения(сигнал "е" рассогласования) ниже заданного порогового значения, вмешательство не происходит, и система переходит к выполнению завершающей операции 101, таким образом решая практически не воздействовать на узел 2 переключения передач, и вопрос о возможном изменении передаточного числа должен вновь решаться в ходе следующей проверочной последовательности. Однако, если обнаружено, что величина значения отклонения выше заданного порогового значения и, таким образом, такова, что требуется вмешательство, система переходит к дополнительной операции 109 и затем к еще одной последующей операции 110, в ходе которой фактически осуществляется воздействие на узел 2 переключения передач так, что выполняется изменение передаточного числа (повышение или понижение) в зависимости от обнаруженных потребностей адаптации, то есть в зависимости от знака значения "е" отклонения. Операция, обозначенная номером 109 (которая необязательна и может в любом случае также выполняться в другой форме, например,просто посредством перехода к завершающей операции 101), соответствует проверке времени(на практике - фильтрующим механизмом), при которой средство 4 управления удостоверяется в том, что после предшествующего изменения передаточного числа прошел адекватный период времени. Если истек период времени, который меньше предварительно заданного порогового значения времени (отрицательный результат операции 109 сравнения), система переходит непосредственно к завершающей операции 101 без воздействия на узел 2 переключения передач, откладывая операцию изменения передаточного числа на следующую проверочную последовательность. Однако, если истек адекватный период времени, система переходит к операции 110,изменяя передаточное число. Со ссылкой на операцию 109 было описано, что посредством воздействия на интерфейс 11 и, в частности, на модуль 10 (относящийся к изменению правил работы системы), велосипедист может избирательно изменять значение порогового значения времени, используемого для выполнения функции фильтрования. 14 В этом случае также, если спортсменлюбитель или развлекающийся велосипедист может считать предпочтительным иметь достаточно большой период времени (в частности,чтобы не иметь слишком "чувствительную" систему, которая изменяет передаточное число каждый раз, когда она обнаруживает необходимость действия в этом смысле, даже за короткие периоды времени), то профессиональный велосипедист, который имеет больше способности и практики оценки и контроля своего физического состояния, может пожелать уменьшить этот период, возможно значительно, таким образом,чтобы иметь систему, которая может очень быстро адаптироваться к разным путям, которые приняты велосипедистом для взаимодействия с велосипедной системой 1. Естественно, при сохранении принципа изобретения, детали конструкции и формы варианта его осуществления могут широко изменяться относительно описанных и проиллюстрированных примеров без отхода от объема настоящего изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система для управления регулируемой трансмиссией, установленной на транспортном средстве и связанной с приводом для изменения передаточного числа, и рабочим средством для приложения тягового усилия к трансмиссии периодическим действием заданной частоты,содержащая первые сенсорные средства, чувствительные к тяговому усилию, для генерирования первого сигнала, вторые сенсорные средства, чувствительные к скорости движения транспортного средства, для генерирования второго сигнала, и средство управления приводом в зависимости от первого и второго сигналов, отличающаяся тем, что она содержит третьи сенсорные средства, чувствительные к частоте приложения тягового усилия, для генерирования третьего сигнала, при этом средство управления выполнено с возможностью определения по меньшей мере по первому и второму сигналам контрольного сигнала частоты приложения усилия и последующего сравнения его с третьим сигналом, формируя при этом сигнал отклонения, а также с возможностью воздействия на привод, изменяющий передаточное число так,чтобы минимизировать сигнал отклонения. 2. Система по п.1, отличающаяся тем, что первое сенсорное средство содержит средство для измерения силы воздействия на педали,прилагаемой к педальному коленчатому рычагу велосипеда, и второе сенсорное средство содержит датчик для определения скорости движения велосипеда вперед, и средство управления является средством управления, способным воздействовать по меньшей мере на один узел переключения передач, установленный на велосипеде. 15 3. Система по п.1 или 2, отличающаяся тем,что средство управления выполнено с возможностью определения сигнала контрольной частоты также в зависимости от третьего сигнала. 4. Система по любому одному из предшествующих пп.1-3, отличающаяся тем, что средство управления содержит первый функциональный модуль, чувствительный к первому сигналу и приспособленный классифицировать первый сигнал в зависимости от соответствующей первой степени родственности, второй функциональный модуль, чувствительный ко второму сигналу и приспособленный классифицировать второй сигнал в зависимости от соответствующей второй степени родственности,третий функциональный модуль для применения правил, чувствительный к соответствующим значениям первой и второй степеней родственности и способный определять значение контрольной частоты по значениям, дифференцированным в зависимости от значений первой и второй степеней родственности. 5. Система по п.4, отличающаяся тем, что она содержит по меньшей мере один модуль управления, работающий избирательно для избирательного изменения по меньшей мере одного из критериев присвоения атрибутов первой степени родственности первым функциональным модулем и присвоения атрибутов второй степени родственности вторым функциональным модулем и правила определения значения контрольной частоты третьим функциональным модулем по степеням родственности, присвоенным первым функциональным модулем и вторым функциональным модулем, и первому и второму сигналам. 6. Система по п.4 или 5, отличающаяся тем,что первый, второй и третий функциональные модули работают в соответствии с нечеткой логикой. 7. Система по п.5, отличающаяся тем, что модуль управления содержит по меньшей мере один из следующих элементов: первый функциональный модуль управления для избирательного изменения критерия присвоения атрибутов первой и второй степеням родственности первым и вторым функциональными модулями в зависимости от уровня спортивной подготовки велосипедиста, второй функциональный модуль управления для избирательного изменения критерия присвоения атрибутов первой и второй степеням родственности первым и вторым функциональными модулями в зависимости от разных вариантов стратегии движения велосипеда и третий функциональный модуль управления для избирательного изменения правил определения значения контрольной частоты,заданного третьим функциональным модулем. 8. Система по любому одному из предшествующих пп.1-7, отличающаяся тем, что средство управления включает функцию задержки действия привода на период времени предвари 004382 16 тельно заданной длительности, начинающийся от предшествующего воздействия, выполненного средством управления, на привод для изменения передаточного числа. 9. Система по п.8, отличающаяся тем, что длительность интервала времени избирательно изменяется. 10. Способ управления регулируемой трансмиссией, установленной на транспортном средстве и связанной с приводом для изменения передаточного числа и рабочим средством для приложения тягового усилия к трансмиссии периодическим действием заданной частоты,содержащий следующие операции: определение тягового усилия и генерирование соответствующего первого сигнала,определение скорости движения транспортного средства и генерирование соответствующего второго сигнала и управление вторым приводом в зависимости от первого и второго сигналов,отличающийся тем, что дополнительно содержит следующие операции: определение частоты приложения тягового усилия и генерирование соответствующего третьего сигнала,определение по меньшей мере по первому и второму сигналам контрольного сигнала частоты приложения тягового усилия,сравнение контрольного сигнала и третьего сигнала для определения соответствующего сигнала отклонения и управление приводом, изменяющим передаточное число так, чтобы минимизировать сигнал отклонения. 11. Способ по п.10, отличающийся тем, что он содержит следующие операции: генерирование первого сигнала как сигнала, показывающего усилие воздействия на педали, прилагаемого к педальному коленчатому рычагу велосипеда,генерирование второго сигнала как сигнала, показывающего скорость при движении самого велосипеда вперед, и управление приводом по меньшей мере одним узлом переключения передач, установленным на велосипеде. 12. Способ по п.10 или 11, отличающийся тем, что он содержит операцию определения значения контрольной частоты также в зависимости от третьего сигнала. 13. Способ по любому одному из пп.10-12,отличающийся тем, что он содержит следующие операции: классификацию первого сигнала в зависимости от соответствующей первой степени родственности,классификацию второго сигнала в зависимости от соответствующей второй степени родственности и определение значения контрольной частоты по значениям, дифференцированным в зави 17 симости от значений первой и второй степеней родственности. 14. Способ по п.13, отличающийся тем, что он содержит операции избирательного изменения по меньшей мере одного из критериев присваивания атрибутов первой степени родственности и присваивания атрибутов второй степени родственности и правила определения значения контрольной частоты по степеням родственности, присвоенным первому и второму сигналам. 15. Способ по п.13 или 14, отличающийся тем, что критерии присвоения атрибутов и правила определения основаны на нечеткой логике. 16. Способ по п.14, отличающийся тем, что он содержит по меньшей мере одну из следующих операций: избирательное изменение критерия присвоения атрибутов первой и второй степеням родственности в зависимости от уровня спортивной подготовки велосипедиста, 18 избирательное изменение критерия присвоения атрибутов первой и второй степеням родственности в зависимости от разных вариантов стратегии движения на велосипеде и избирательное изменение правил определения значения контрольной частоты по степеням родственности. 17. Способ по любому одному из предшествующих пп.10-16, отличающийся тем, что он содержит операцию задержки воздействия на привод на период времени предварительно заданной длительности, начинающийся от предшествующего воздействия на привод для изменения передаточного числа. 18. Способ по п.17, отличающийся тем, что длительность периода времени избирательно изменяется.
МПК / Метки
МПК: B60K 41/06, B62M 25/08
Метки: регулируемыми, трансмиссиями, управления, способ, система
Код ссылки
<a href="https://eas.patents.su/10-4382-sistema-i-sposob-upravleniya-reguliruemymi-transmissiyami.html" rel="bookmark" title="База патентов Евразийского Союза">Система и способ управления регулируемыми трансмиссиями</a>
Оптоэлектронная система управления и способ управления
Номер патента: 3571
Опубликовано: 26.06.2003
Авторы: Макиннес Джеймс, Леггет Найджел Дерек
МПК: H03K 17/78, G08C 23/06
Метки: оптоэлектронная, система, управления, способ
Формула / Реферат:
1. Система управления, предназначенная для приведения в действие множества электротехнических устройств и имеющая импульсный источник света, выдающий световые импульсы с варьируемой частотой, которые поступают во множество управляющих шлюзов, каждый из которых при его освещении световыми импульсами с запускающей частотой, при которой происходит срабатывание соответствующего устройства, обеспечивает подачу на такое устройство рабочего напряжения,...
Способ и система управления скоростью двигателя для улучшения переключения передач
Номер патента: 3849
Опубликовано: 30.10.2003
Автор: Мейер Дуэйн Фредерик
МПК: B60K 41/10
Метки: передач, управления, переключения, система, способ, скоростью, улучшения, двигателя
Формула / Реферат:
1. Способ улучшения качества переключения передач в транспортном средстве, имеющем оснащенный регулятором двигатель (10), приводящий в действие силовую трансмиссию (12) с переключением скоростей под нагрузкой, содержащую коробку (18) передач, которая работает с помощью набора управляемых давлением муфт (20) сцепления, управление которыми осуществляется с помощью соответствующего набора клапанов (22) управления переключением передач с приводом от...
Способ управления идентификацией перемещаемых объектов и система для его осуществления
Номер патента: 4164
Опубликовано: 26.02.2004
Автор: Кузьмин Юрий Андрианович
МПК: B61L 1/16, B61L 25/04
Метки: осуществления, система, способ, объектов, идентификацией, управления, перемещаемых
Формула / Реферат:
1. Способ управления идентификацией перемещаемых объектов, при котором объекты оборудуют идентификаторами, а считывающее устройство дополняют двумя счетчиками осей перемещаемых объектов, подсчитывают и сравнивают количество осей каждого проследовавшего объекта, при их совпадении включают генератор опросного сигнала, считывают идентификаторы подвижных объектов, а после нарушения равенства выключают генератор опросного сигнала, отличающийся тем,...
Фотодетекторная система и способ управления ее возбуждением
Номер патента: 3767
Опубликовано: 28.08.2003
Авторы: Накамура Есиаки, Косизука Ясуо, Сасаки Макото
МПК: H04N 3/15
Метки: управления, система, возбуждением, способ, фотодетекторная
Формула / Реферат:
1. Фотодетекторная система, включающая фотодетекторную матрицу (100), содержащую множество фотодетекторов (10) с двумерным расположением, средство инициализации (111, 112, 120) для подачи импульсного сигнала сброса (ЖTi) на каждый из фотодетекторов (10) фотодетекторной матрицы (100) и, в результате, для инициализации фотодетекторов (10), средство считывания сигнала (114, 115, 120) для подачи импульсного сигнала предзаряда (Ж pg) на каждый из...
Система фотодетекторов и способ управления ею
Номер патента: 4170
Опубликовано: 26.02.2004
Автор: Накамура Йосиаки
МПК: H04N 5/235
Метки: способ, система, фотодетекторов, управления
Формула / Реферат:
1. Система фотодетекторов, содержащая матрицу (100) фотодетекторов, образованную путем размещения в двумерный массив множества фотодетекторов (10); и средство формирования изображения, предназначенное для формирования изображения объекта, состоящего из элементов изображения, сформированных на множестве фотодетекторов, с предварительно установленной чувствительностью восприятия матрицей (100) фотодетекторов, отличающаяся тем, что она содержит...
Предыдущий патент: Кристаллический моногидрат, способ его получения и его применение для получения лекарственного средства
Следующий патент: Способ и система для создания с помощью компьютера собственных операторов и файла для устройства моделирования потока жидкости в пористых средах
Случайный патент: Оценка уровней текучей среды в системе погружного винтового насоса