Привод перемещения координатного устройства и способ его управления
Номер патента: 24502
Опубликовано: 30.09.2016
Авторы: Басинюк Владимир Леонидович, Ломако Василий Геннадьевич, Мардосевич Елена Ивановна, Папина Сергей Степанович
Формула / Реферат
1. Привод перемещения координатного устройства, содержащий основание и жестко связанные с ним электродвигатель с редуктором и направляющую с расположенным вдоль нее бесконечным ремнем, соединенным с редуктором электродвигателя и подвижной кареткой, и модуль управления приводом ее перемещения, выход которого связан с электродвигателем, отличающийся тем, что привод снабжен модулем дополнительного тягового усилия, выполненным в виде установленного вдоль направляющей линейного электродвигателя, блоком определения амплитуды собственных колебаний подвижной каретки вдоль направляющей, узкополосным фильтром с полосой пропускания, соответствующей частоте собственных колебаний подвижной каретки, вибродатчиком, установленным на подвижной каретке, и блоком определения мощности, потребляемой электродвигателем, при этом якорь линейного электродвигателя жестко связан с подвижной кареткой, а его статор - жестко связан с основанием, причем выход блока определения амплитуды собственных колебаний подвижной каретки вдоль направляющей связан с входом модуля управления приводом перемещения подвижной каретки, выход узкополосного фильтра связан с входом блока определения амплитуды собственных колебаний подвижной каретки вдоль направляющей, выход вибродатчика связан с входом узкополосного фильтра, вход блока определения электрической мощности связан с электродвигателем, а его выход - с модулем управления приводом перемещения подвижной каретки.
2. Привод перемещения координатного устройства по п.1, отличающийся тем, что линейный электродвигатель модуля дополнительного тягового усилия выполнен в виде линейного электродвигателя, статор которого состоит из жестко связанного с основанием вала, установленного параллельно направляющей в отверстии подвижной каретки, при этом на валу установлены и жестко связаны с ней постоянные магниты, выполненные в виде втулок, а якорь состоит из катушек индуктивности, размещенных кооксиально валу статора в отверстии подвижной каретки и соединенных со вторым выходом модуля управления приводом перемещения подвижной каретки.
3. Привод перемещения координатного устройства по п.1, отличающийся тем, что линейный электродвигатель модуля дополнительного тягового усилия выполнен в виде линейного двигателя постоянного тока, якорь которого состоит из постоянных магнитов, установленных параллельно друг другу и направляющей и жестко связанных с подвижной кареткой, а ротор состоит из размещенной на стержне с прямоугольным поперечным сечением катушки, связанной со вторым выходом модуля перемещения приводом перемещения подвижной каретки, при этом стержень установлен между постоянными магнитами якоря параллельно направляющей и жестко связан с основанием.
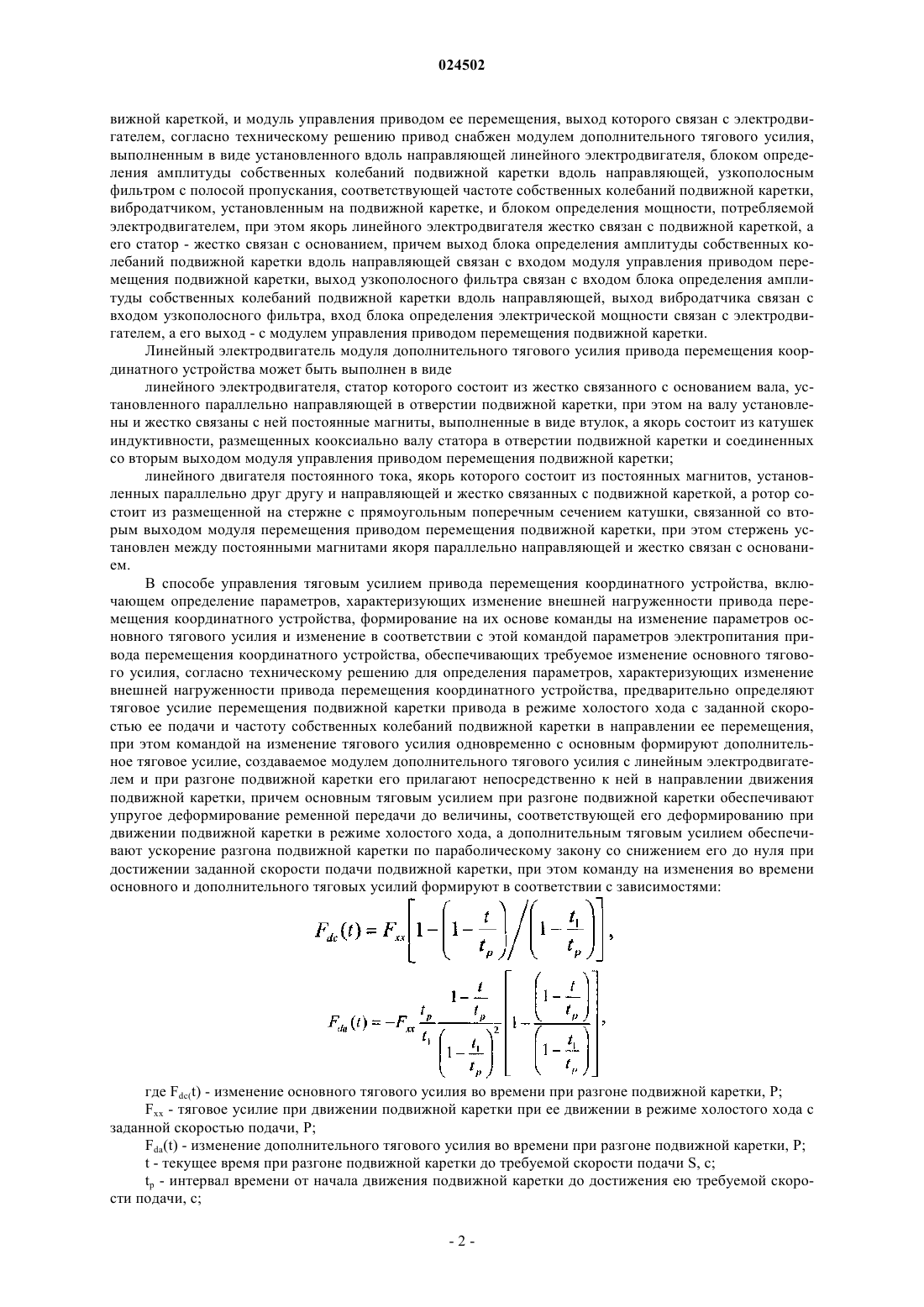
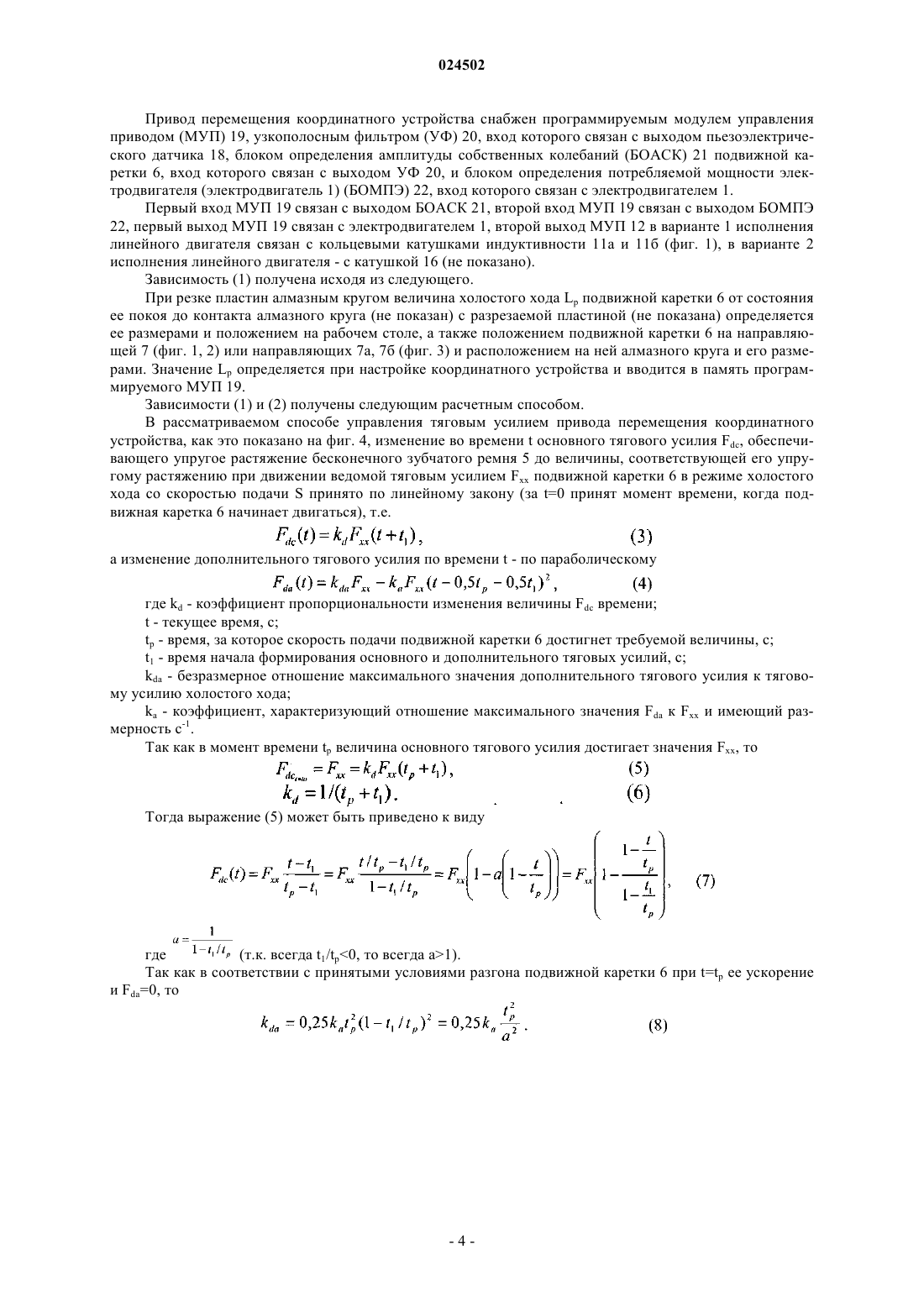
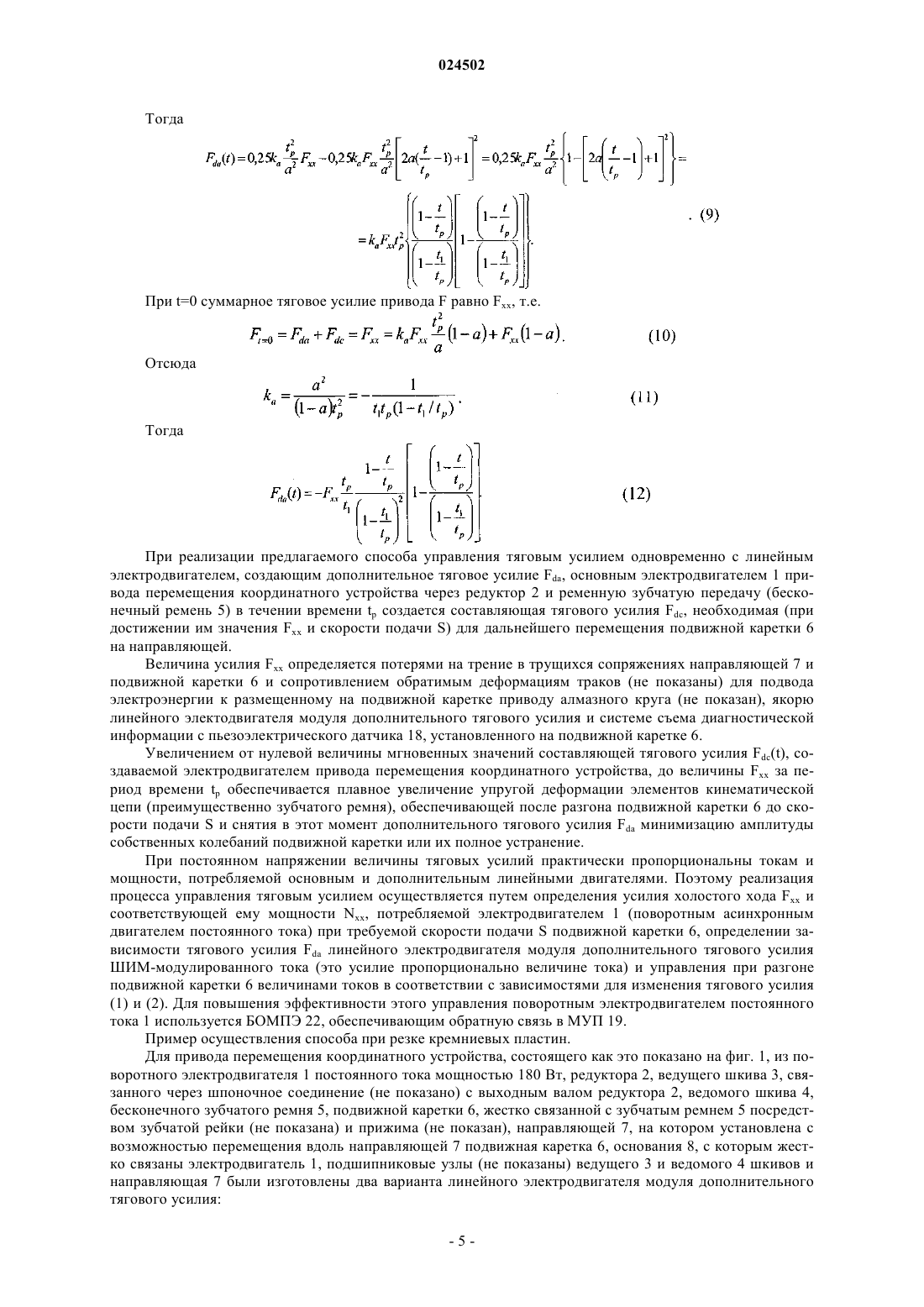
4. Способ управления тяговым усилием привода перемещения координатного устройства по п.1, включающий определение параметров, характеризующих изменение внешней нагруженности привода перемещения координатного устройства, формирование на их основе команды на изменение параметров основного тягового усилия и изменение в соответствии с этой командой параметров электропитания привода перемещения координатного устройства, обеспечивающих требуемое изменение основного тягового усилия, отличающийся тем, что для определения параметров, характеризующих изменение внешней нагруженности привода перемещения координатного устройства, предварительно определяют тяговое усилие перемещения подвижной каретки привода в режиме холостого хода с заданной скоростью ее подачи и частоту собственных колебаний подвижной каретки в направлении ее перемещения, при этом командой на изменение тягового усилия одновременно с основным формируют дополнительное тяговое усилие, создаваемое модулем дополнительного тягового усилия с линейным электродвигателем и при разгоне подвижной каретки его прилагают непосредственно к ней в направлении движения подвижной каретки, причем основным тяговым усилием при разгоне подвижной каретки обеспечивают упругое деформирование ременной передачи до величины, соответствующей его деформированию при движении подвижной каретки в режиме холостого хода, а дополнительным тяговым усилием обеспечивают ускорение разгона подвижной каретки по параболическому закону со снижением его до нуля при достижении заданной скорости подачи подвижной каретки, при этом команду на изменения во времени основного и дополнительного тяговых усилий формируют в соответствии с зависимостями:

где Fdc(t) - изменение основного тягового усилия во времени при разгоне подвижной каретки, H;
Fxx - тяговое усилие при движении подвижной каретки при ее движении в режиме холостого хода с заданной скоростью подачи, H;
Fda(t) - изменение дополнительного тягового усилия во времени при разгоне подвижной каретки, H;
t - текущее время при разгоне подвижной каретки до требуемой скорости подачи S, с;
tp - интервал времени от начала движения подвижной каретки до достижения ею требуемой скорости подачи, с;
t1 - интервал времени, при котором суммарное значение основного и дополнительного тягового усилия достигает значения Fxx, t1=(0,05-0,5)tp, c,
при этом в процессе движения подвижной каретки после достижения требуемой скорости подачи определяют амплитуду ее собственных колебаний в направлении движения, например, пьезоэлектрическим датчиком, сигнал с которого обрабатывают узкополосной фильтрацией, и для снижения амплитуды собственных колебаний дополнительное тяговое усилие Fdv прикладывают к подвижной каретке в противофазе этим колебаниям с их частотой.

Текст
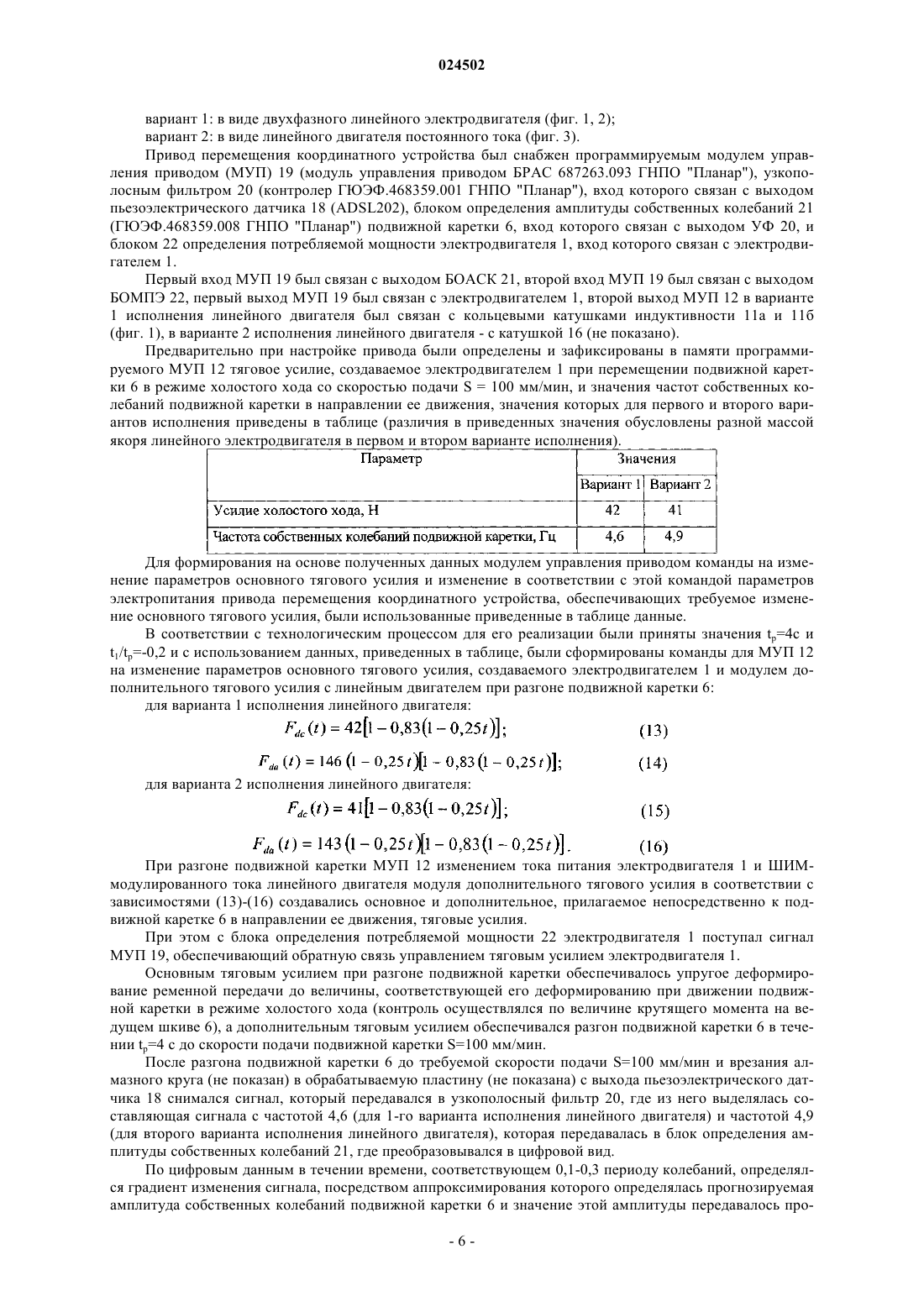
ПРИВОД ПЕРЕМЕЩЕНИЯ КООРДИНАТНОГО УСТРОЙСТВА И СПОСОБ ЕГО УПРАВЛЕНИЯ Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим линейное перемещение обрабатывающего инструмента относительно обрабатываемого изделия,и может быть использовано в высокоточном технологическом оборудовании при резце кремниевых пластин алмазным дисковым инструментом. Результат, для достижения которого направлено данное техническое решение, заключается в существенном уменьшении амплитуды собственных колебаний. Достижение результата в предлагаемом техническом решении достигается тем, что в привод перемещения координатного устройства с ременной передачей введены взаимосвязанные между собой модуль дополнительного тягового усилия, блок определения амплитуды собственных колебаний подвижной каретки вдоль направляющей, узкополосный фильтр с полосой пропускания, соответствующей частоте собственных колебаний подвижной каретки, вибродатчик, установленный на подвижной каретке в направлении ее перемещения, и блок определения электрической мощности, потребляемой электродвигателем, а в способе управления тяговым усилием привод дополнительного тягового усилия связан с кареткой и обеспечивает программируемое изменение дополнительного тягового усилия. Реализация данного технического решения позволяет практически исключить возникновение собственных колебаний подвижной каретки. Басинюк Владимир Леонидович,Мардосевич Елена Ивановна, Папина Сергей Степанович, Ломако Василий Геннадьевич (BY)(71)(73) Заявитель и патентовладелец: ГОСУДАРСТВЕННОЕ НАУЧНОЕ УЧРЕЖДЕНИЕ "ОБЪЕДИНЕННЫЙ ИНСТИТУТ МАШИНОСТРОЕНИЯ НАЦИОНАЛЬНОЙ АКАДЕМИИ НАУК БЕЛАРУСИ" (BY) Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим линейное перемещение обрабатывающего инструмента относительно обрабатываемого изделия, и может быть использовано в высокоточном технологическом оборудовании, например, при резце кремниевых пластин алмазным дисковым инструментом в условиях серийного и массового производства. Известен привод координатного устройства (координатного стола КСР-2), содержащий направляющие, каретку и привод ее линейных перемещений с ременной зубчатой передачей, кинематически связанной с кареткой [см. www.servotechnica.ru/project/index.plid=22]. Существенным недостатком привода является возникновение значительных по амплитуде собственных колебаний в начальный момент ее движения и при резком изменении сопротивления перемещению каретки, например, при врезании размещенного на ней режущего инструмента в обрабатываемую заготовку, приводящих к снижению качества обработки и повреждению инструмента. Это обусловлено наличием между кареткой и приводом упругоподатливого зубчатого ремня и отсутствием средств гашения колебаний. Наиболее близким по технической сущности к предлагаемому является взятый в качестве прототипа привод перемещения координатного устройства (см. патент RU 2047473, МПК 6B24B 51/00, 1995 г.),содержащий основание, направляющую, жестко связанную с основанием, электродвигатель с редуктором, жестко связанные с основанием, бесконечный ремень, расположенный вдоль направляющей и кинематически связанный с редуктором электродвигателя, подвижную каретку, связанную с бесконечным ремнем, и модуль управления приводом перемещения подвижной каретки, выход которого связан с электродвигателем. Существенным недостатком привода перемещения координатного устройства является возникновение значительных по амплитуде собственных колебаний в начальный момент движения и при резком изменении сопротивления перемещению каретки, например, при врезании размещенного на каретке алмазного режущего инструмента в обрабатываемую заготовку. Возникновение собственных колебаний приводит к снижению качества обработки и повреждению инструмента. Их возникновение обусловлено наличием между кареткой и приводом упругоподатливого ремня и отсутствием средств управления тяговым усилием привода координатного устройства, позволяющего уменьшить обусловленную инерционными нагрузками деформацию ремня и собственные колебания каретки и за счет этого снизить до приемлемого, с позиций обеспечения требуемого качества обработки, уровня амплитуду собственных колебаний каретки. Известен способ управления тяговым усилием электропривода путем регулирования величины создаваемого им тягового усилия, реализация которого осуществляется путем изменения глубины модуляции выходного напряжения блока электропитания, преобразующего постоянный ток в переменный по команде на изменение моментообразующей составляющей тока статора, формируемой по результатам контроля намагничивающей составляющей тока в его первичной обмотке (патент RU 2193814,Н 02 Р 21/00, 2002 г.). Недостатком данного способа является крайне ограниченные возможности снижения амплитуды собственных колебаний приводимого им в движение исполнительного устройства при наличии между ними упруго-податливого элемента, например ременной передачи, и обусловленным этим не эффективностью их гашения с использованием приведенного выше способа управления тяговым усилием электропривода. Возникновение собственных колебаний приводит к снижению качества обработки и повреждению инструмента. Наиболее близким по технической сущности к предлагаемому является выбранный в качестве прототипа способ управления тяговым усилием электропривода (см. патент RU2459345, МПК 6 Н 02 Р 21/00, 2010 г.) путем определения изменения магнитоэлектрических параметров, обусловленных изменением внешней нагруженности, формирования команды на изменение тягового усилия и ее реализацию, обеспечивающую создание требуемого тягового усилия электропривода (см. патент RU2459345, 2010 г.). Недостатком данного способа является крайне ограниченные возможности снижения амплитуды собственных колебаний приводимого им в движение исполнительного устройства (каретки) при наличии между ними упруго-податливого элемента, например ременной передачи, обусловливающего "запаздывание" поступления информации об изменении внешней, связанной с собственными колебаниями, вибрационной нагруженности на "внутренние" магнитоэлектрические параметры электродвигателя. Возникновение собственных колебаний приводит к снижению качества обработки и повреждению инструмента. Задачей, на решение которой направлено данное техническое решение, является повышение качества обработки изделий и исключение поломок инструмента за счет уменьшения амплитуды собственных колебаний подвижной каретки, возникающих при ее ускорениях в начальный момент движения и при резком изменении сопротивления перемещению, например, при врезании размещенного на ней режущего инструмента в обрабатываемую заготовку. Указанный результат достигается за счет того, что в приводе перемещения координатного устройства, содержащем основание и жестко связанные с ним электродвигатель с редуктором и направляющую с расположенным вдоль нее бесконечным ремнем, соединенным с редуктором электродвигателя и под-1 024502 вижной кареткой, и модуль управления приводом ее перемещения, выход которого связан с электродвигателем, согласно техническому решению привод снабжен модулем дополнительного тягового усилия,выполненным в виде установленного вдоль направляющей линейного электродвигателя, блоком определения амплитуды собственных колебаний подвижной каретки вдоль направляющей, узкополосным фильтром с полосой пропускания, соответствующей частоте собственных колебаний подвижной каретки,вибродатчиком, установленным на подвижной каретке, и блоком определения мощности, потребляемой электродвигателем, при этом якорь линейного электродвигателя жестко связан с подвижной кареткой, а его статор - жестко связан с основанием, причем выход блока определения амплитуды собственных колебаний подвижной каретки вдоль направляющей связан с входом модуля управления приводом перемещения подвижной каретки, выход узкополосного фильтра связан с входом блока определения амплитуды собственных колебаний подвижной каретки вдоль направляющей, выход вибродатчика связан с входом узкополосного фильтра, вход блока определения электрической мощности связан с электродвигателем, а его выход - с модулем управления приводом перемещения подвижной каретки. Линейный электродвигатель модуля дополнительного тягового усилия привода перемещения координатного устройства может быть выполнен в виде линейного электродвигателя, статор которого состоит из жестко связанного с основанием вала, установленного параллельно направляющей в отверстии подвижной каретки, при этом на валу установлены и жестко связаны с ней постоянные магниты, выполненные в виде втулок, а якорь состоит из катушек индуктивности, размещенных кооксиально валу статора в отверстии подвижной каретки и соединенных со вторым выходом модуля управления приводом перемещения подвижной каретки; линейного двигателя постоянного тока, якорь которого состоит из постоянных магнитов, установленных параллельно друг другу и направляющей и жестко связанных с подвижной кареткой, а ротор состоит из размещенной на стержне с прямоугольным поперечным сечением катушки, связанной со вторым выходом модуля перемещения приводом перемещения подвижной каретки, при этом стержень установлен между постоянными магнитами якоря параллельно направляющей и жестко связан с основанием. В способе управления тяговым усилием привода перемещения координатного устройства, включающем определение параметров, характеризующих изменение внешней нагруженности привода перемещения координатного устройства, формирование на их основе команды на изменение параметров основного тягового усилия и изменение в соответствии с этой командой параметров электропитания привода перемещения координатного устройства, обеспечивающих требуемое изменение основного тягового усилия, согласно техническому решению для определения параметров, характеризующих изменение внешней нагруженности привода перемещения координатного устройства, предварительно определяют тяговое усилие перемещения подвижной каретки привода в режиме холостого хода с заданной скоростью ее подачи и частоту собственных колебаний подвижной каретки в направлении ее перемещения,при этом командой на изменение тягового усилия одновременно с основным формируют дополнительное тяговое усилие, создаваемое модулем дополнительного тягового усилия с линейным электродвигателем и при разгоне подвижной каретки его прилагают непосредственно к ней в направлении движения подвижной каретки, причем основным тяговым усилием при разгоне подвижной каретки обеспечивают упругое деформирование ременной передачи до величины, соответствующей его деформированию при движении подвижной каретки в режиме холостого хода, а дополнительным тяговым усилием обеспечивают ускорение разгона подвижной каретки по параболическому закону со снижением его до нуля при достижении заданной скорости подачи подвижной каретки, при этом команду на изменения во времени основного и дополнительного тяговых усилий формируют в соответствии с зависимостями: где Fdc(t) - изменение основного тягового усилия во времени при разгоне подвижной каретки, P;Fxx - тяговое усилие при движении подвижной каретки при ее движении в режиме холостого хода с заданной скоростью подачи, P;Fda(t) - изменение дополнительного тягового усилия во времени при разгоне подвижной каретки, P;t - текущее время при разгоне подвижной каретки до требуемой скорости подачи S, c;tp - интервал времени от начала движения подвижной каретки до достижения ею требуемой скорости подачи, с;t1 - интервал времени, при котором суммарное значение основного и дополнительного тягового усилия достигает значения Fxx, t1=(0,05-0,5)tp, с,при этом в процессе движения подвижной каретки после достижения требуемой скорости подачи определяют амплитуду ее собственных колебаний в направлении движения, например, пьезоэлектрическим датчиком, сигнал с которого обрабатывают узкополосной фильтрацией, и для снижения амплитуды собственных колебаний дополнительное тяговое усилие Fdv прикладывают к подвижной каретке в противофазе этим колебаниям с их частотой. Уменьшение амплитуды собственных колебаний, возникающих при ускорениях каретки в начальный момент ее движения и при резком изменении сопротивления ее перемещению, например, при врезании размещенного на ней режущего инструмента в обрабатываемую заготовку, и, как следствие, повышение качества обработки, предотвращение повреждения и продление срока службы инструмента, обеспечивается в результате следующего: формируемое с момента трогания каретки с положения "покоя" до ее разгона до требуемой скорости подачи S в соответствии с зависимостью (1) основное усилие обеспечивает упругое растяжение бесконечного ремня на величину, соответствующую его упругому растяжению при холостом ходе со скоростью подачи S, а прилагаемое непосредственно к каретке составляющей в соответствии с зависимостью(2) дополнительного тягового усилия Fda обеспечивает изменение ускорения каретки по параболическому закону таким образом, чтобы за период времени tp на отрезке расстояния Lp разогнать подвижную каретку до требуемой скорости подачи S и в момент достижения этой скорости подачи снизить ускорение подвижной каретки до нуля, что в совокупности обусловливает повышенную плавность движения подвижной каретки в режиме холостого хода и исключает возникновение собственных колебаний, обусловленных инерционными нагрузками и упругой деформацией ремня; формирование прикладываемой к каретке дополнительной составляющей тягового усилия Fdv с частотой ее собственных колебаний, возникающих при врезании алмазного дискового инструмента в кремневую пластину и его выходе из кремневой пластины, в противофазе этим колебаниям с амплитудой,близкой по величине амплитуде собственных колебаний, позволяет эффективно их погасить; аналогичное приведенным выше процессы гашения собственных колебаний протекают при остановке подвижной каретки после завершения процесса резания. Дополнительным эффектом от снижения амплитуды собственных колебаний является увеличение в 1,5-2 раза ресурса ремня и пар трения каретки и направляющей. Изобретение поясняется чертежами, где на фиг. 1 изображено заявляемое устройство с модулем дополнительного тягового усилия с двухфазным линейным электродвигателем; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - поперечное сечение устройства с модулем дополнительного тягового усилия с линейным электродвигателем постоянного тока; на фиг. 4 - схема формирования основного и дополнительного тягового усилия. Привод перемещения координатного устройства состоит (фиг. 1, 2) из электродвигателя 1, редуктора 2, входной вал которого (не показан) жестко связан с валом (не показан) электродвигателя 1, ведущего шкива 3, жестко связанного с выходным валом редуктора 2, ведомого шкива 4, бесконечного зубчатого ремня 5, подвижной каретки 6, жестко связанной с зубчатым ремнем 5 посредством, например, зубчатой рейки (не показана) и прижима (не показан), направляющей 7, на котором установлена с возможностью перемещения вдоль направляющей 7 подвижная каретка 6, основания 8, с которым жестко связаны электродвигатель 1, подшипниковые узлы (не показаны) ведущего 3 и ведомого 4 шкивов и направляющая 7. Привод перемещения координатного устройства снабжен модулем дополнительного тягового усилия с линейным электродвигателем, который может быть выполнен в виде двухфазного линейного электродвигателя (фиг. 1, 2), статор которого состоит из жестко связанного с основанием 8 вала 9, установленного параллельно направляющей 7 и размещенных на валу жестко связанных с ним постоянных магнитов 10, выполненных в виде втулок и входящих с зазором в сквозное отверстие (не показано), выполненное в подвижной каретке 6 параллельно направляющей 7, якорь состоит из кооксиально установленных по отношению к постоянным магнитам 10 статора двух кольцевых катушек индуктивности 11 а и 11 б, размещенных последовательно вдоль оси вала 9 в отверстии подвижной каретки 6 и жестко связанных с ней; в виде линейного электродвигателя постоянного тока (фиг. 3), якорь которого состоит из двух жестко связанных с подвижной кареткой 6 постоянных магнитов 12 а и 12 б, установленных на кронштейнах соответственно 13 а и 13 б параллельно друг другу и направлению движения подвижной каретки 6 (установленным параллельно направляющим 7 а и 7 б, размещенным на кронштейнах соответственно 14 а и 14 б, жестко связанным как с основанием 8, так и соответствующими направляющими 7 а и 7 б), а ротор состоит размещенной на стержне 15 с прямоугольным поперечным сечением катушки 16, стержень 15 установлен межу постоянными магнитами 12 а и 12 б параллельно направляющей 7 а (7 б) и жестко связан с основанием 8. На подвижной каретке 6 установлен пьезоэлектрический датчик 18, ориентированный в направлении ее движения вдоль направляющей 7 (фиг. 1). Привод перемещения координатного устройства снабжен программируемым модулем управления приводом (МУП) 19, узкополосным фильтром (УФ) 20, вход которого связан с выходом пьезоэлектрического датчика 18, блоком определения амплитуды собственных колебаний (БОАСК) 21 подвижной каретки 6, вход которого связан с выходом УФ 20, и блоком определения потребляемой мощности электродвигателя (электродвигатель 1) (БОМПЭ) 22, вход которого связан с электродвигателем 1. Первый вход МУП 19 связан с выходом БОАСК 21, второй вход МУП 19 связан с выходом БОМПЭ 22, первый выход МУП 19 связан с электродвигателем 1, второй выход МУП 12 в варианте 1 исполнения линейного двигателя связан с кольцевыми катушками индуктивности 11 а и 11 б (фиг. 1), в варианте 2 исполнения линейного двигателя - с катушкой 16 (не показано). Зависимость (1) получена исходя из следующего. При резке пластин алмазным кругом величина холостого хода Lp подвижной каретки 6 от состояния ее покоя до контакта алмазного круга (не показан) с разрезаемой пластиной (не показана) определяется ее размерами и положением на рабочем столе, а также положением подвижной каретки 6 на направляющей 7 (фиг. 1, 2) или направляющих 7 а, 7 б (фиг. 3) и расположением на ней алмазного круга и его размерами. Значение Lp определяется при настройке координатного устройства и вводится в память программируемого МУП 19. Зависимости (1) и (2) получены следующим расчетным способом. В рассматриваемом способе управления тяговым усилием привода перемещения координатного устройства, как это показано на фиг. 4, изменение во времени t основного тягового усилия Fdc, обеспечивающего упругое растяжение бесконечного зубчатого ремня 5 до величины, соответствующей его упругому растяжению при движении ведомой тяговым усилием Fxx подвижной каретки 6 в режиме холостого хода со скоростью подачи S принято по линейному закону (за t=0 принят момент времени, когда подвижная каретка 6 начинает двигаться), т.е. а изменение дополнительного тягового усилия по времени t - по параболическому где kd - коэффициент пропорциональности изменения величины Fdc времени;tp - время, за которое скорость подачи подвижной каретки 6 достигнет требуемой величины, c;t1 - время начала формирования основного и дополнительного тяговых усилий, с;kda - безразмерное отношение максимального значения дополнительного тягового усилия к тяговому усилию холостого хода;ka - коэффициент, характеризующий отношение максимального значения Fda к Fxx и имеющий размерность c-1. Так как в момент времени tp величина основного тягового усилия достигает значения Fxx, то Тогда выражение (5) может быть приведено к виду(т.к. всегда t1/tp0, то всегда a1). Так как в соответствии с принятыми условиями разгона подвижной каретки 6 при t=tp ее ускорение и Fda=0, то При t=0 суммарное тяговое усилие привода F равно Fxx, т.е. При реализации предлагаемого способа управления тяговым усилием одновременно с линейным электродвигателем, создающим дополнительное тяговое усилие Fda, основным электродвигателем 1 привода перемещения координатного устройства через редуктор 2 и ременную зубчатую передачу (бесконечный ремень 5) в течении времени tp создается составляющая тягового усилия Fdc, необходимая (при достижении им значения Fxx и скорости подачи S) для дальнейшего перемещения подвижной каретки 6 на направляющей. Величина усилия Fxx определяется потерями на трение в трущихся сопряжениях направляющей 7 и подвижной каретки 6 и сопротивлением обратимым деформациям траков (не показаны) для подвода электроэнергии к размещенному на подвижной каретке приводу алмазного круга (не показан), якорю линейного электодвигателя модуля дополнительного тягового усилия и системе съема диагностической информации с пьезоэлектрического датчика 18, установленного на подвижной каретке 6. Увеличением от нулевой величины мгновенных значений составляющей тягового усилия Fdc(t), создаваемой электродвигателем привода перемещения координатного устройства, до величины Fxx за период времени tp обеспечивается плавное увеличение упругой деформации элементов кинематической цепи (преимущественно зубчатого ремня), обеспечивающей после разгона подвижной каретки 6 до скорости подачи S и снятия в этот момент дополнительного тягового усилия Fda минимизацию амплитуды собственных колебаний подвижной каретки или их полное устранение. При постоянном напряжении величины тяговых усилий практически пропорциональны токам и мощности, потребляемой основным и дополнительным линейными двигателями. Поэтому реализация процесса управления тяговым усилием осуществляется путем определения усилия холостого хода Fxx и соответствующей ему мощности Nxx, потребляемой электродвигателем 1 (поворотным асинхронным двигателем постоянного тока) при требуемой скорости подачи S подвижной каретки 6, определении зависимости тягового усилия Fda линейного электродвигателя модуля дополнительного тягового усилия ШИМ-модулированного тока (это усилие пропорционально величине тока) и управления при разгоне подвижной каретки 6 величинами токов в соответствии с зависимостями для изменения тягового усилия(1) и (2). Для повышения эффективности этого управления поворотным электродвигателем постоянного тока 1 используется БОМПЭ 22, обеспечивающим обратную связь в МУП 19. Пример осуществления способа при резке кремниевых пластин. Для привода перемещения координатного устройства, состоящего как это показано на фиг. 1, из поворотного электродвигателя 1 постоянного тока мощностью 180 Вт, редуктора 2, ведущего шкива 3, связанного через шпоночное соединение (не показано) с выходным валом редуктора 2, ведомого шкива 4,бесконечного зубчатого ремня 5, подвижной каретки 6, жестко связанной с зубчатым ремнем 5 посредством зубчатой рейки (не показана) и прижима (не показан), направляющей 7, на котором установлена с возможностью перемещения вдоль направляющей 7 подвижная каретка 6, основания 8, с которым жестко связаны электродвигатель 1, подшипниковые узлы (не показаны) ведущего 3 и ведомого 4 шкивов и направляющая 7 были изготовлены два варианта линейного электродвигателя модуля дополнительного тягового усилия: вариант 1: в виде двухфазного линейного электродвигателя (фиг. 1, 2); вариант 2: в виде линейного двигателя постоянного тока (фиг. 3). Привод перемещения координатного устройства был снабжен программируемым модулем управления приводом (МУП) 19 (модуль управления приводом БРАС 687263.093 ГНПО "Планар"), узкополосным фильтром 20 (контролер ГЮЭФ.468359.001 ГНПО "Планар"), вход которого связан с выходом пьезоэлектрического датчика 18 (ADSL202), блоком определения амплитуды собственных колебаний 21(ГЮЭФ.468359.008 ГНПО "Планар") подвижной каретки 6, вход которого связан с выходом УФ 20, и блоком 22 определения потребляемой мощности электродвигателя 1, вход которого связан с электродвигателем 1. Первый вход МУП 19 был связан с выходом БОАСК 21, второй вход МУП 19 был связан с выходом БОМПЭ 22, первый выход МУП 19 был связан с электродвигателем 1, второй выход МУП 12 в варианте 1 исполнения линейного двигателя был связан с кольцевыми катушками индуктивности 11 а и 11 б(фиг. 1), в варианте 2 исполнения линейного двигателя - с катушкой 16 (не показано). Предварительно при настройке привода были определены и зафиксированы в памяти программируемого МУП 12 тяговое усилие, создаваемое электродвигателем 1 при перемещении подвижной каретки 6 в режиме холостого хода со скоростью подачи S = 100 мм/мин, и значения частот собственных колебаний подвижной каретки в направлении ее движения, значения которых для первого и второго вариантов исполнения приведены в таблице (различия в приведенных значения обусловлены разной массой якоря линейного электродвигателя в первом и втором варианте исполнения). Для формирования на основе полученных данных модулем управления приводом команды на изменение параметров основного тягового усилия и изменение в соответствии с этой командой параметров электропитания привода перемещения координатного устройства, обеспечивающих требуемое изменение основного тягового усилия, были использованные приведенные в таблице данные. В соответствии с технологическим процессом для его реализации были приняты значения tp=4c иt1/tp=-0,2 и с использованием данных, приведенных в таблице, были сформированы команды для МУП 12 на изменение параметров основного тягового усилия, создаваемого электродвигателем 1 и модулем дополнительного тягового усилия с линейным двигателем при разгоне подвижной каретки 6: для варианта 1 исполнения линейного двигателя: При разгоне подвижной каретки МУП 12 изменением тока питания электродвигателя 1 и ШИМмодулированного тока линейного двигателя модуля дополнительного тягового усилия в соответствии с зависимостями (13)-(16) создавались основное и дополнительное, прилагаемое непосредственно к подвижной каретке 6 в направлении ее движения, тяговые усилия. При этом с блока определения потребляемой мощности 22 электродвигателя 1 поступал сигнал МУП 19, обеспечивающий обратную связь управлением тяговым усилием электродвигателя 1. Основным тяговым усилием при разгоне подвижной каретки обеспечивалось упругое деформирование ременной передачи до величины, соответствующей его деформированию при движении подвижной каретки в режиме холостого хода (контроль осуществлялся по величине крутящего момента на ведущем шкиве 6), а дополнительным тяговым усилием обеспечивался разгон подвижной каретки 6 в течении tp=4 с до скорости подачи подвижной каретки S=100 мм/мин. После разгона подвижной каретки 6 до требуемой скорости подачи S=100 мм/мин и врезания алмазного круга (не показан) в обрабатываемую пластину (не показана) с выхода пьезоэлектрического датчика 18 снимался сигнал, который передавался в узкополосный фильтр 20, где из него выделялась составляющая сигнала с частотой 4,6 (для 1-го варианта исполнения линейного двигателя) и частотой 4,9(для второго варианта исполнения линейного двигателя), которая передавалась в блок определения амплитуды собственных колебаний 21, где преобразовывался в цифровой вид. По цифровым данным в течении времени, соответствующем 0,1-0,3 периоду колебаний, определялся градиент изменения сигнала, посредством аппроксимирования которого определялась прогнозируемая амплитуда собственных колебаний подвижной каретки 6 и значение этой амплитуды передавалось про-6 024502 граммируемый модуль управления приводом 19. В МУП 19 формировалась команда на создание периодически изменяющегося с частотой 4,6 (для 1 ого варианта исполнения линейного двигателя) и частотой 4,9 (для второго варианта исполнения линейного двигателя) тягового усилия, имеющего противоположную собственным колебаниям фазу. Эта команда передавалась в варианте 1 исполнения линейного электродвигателя на две кольцевые катушки индуктивности 11a и 11 б, в вариант 2 исполнения линейного электродвигателя - катушку 16. Анализ параметров собственных колебаний подвижной каретки 6 в направлении ее движения разгоне, после разгона до скорости подачи S=100 мм/мин, врезании и выходе алмазного круга из обрабатываемой пластины показал, что реализация предлагаемого технического решения как по первому, так и по второму варианту исполнения линейного двигателя позволило практически исключить возникновение собственных колебаний (снизить их амплитуду более, чем на порядок) подвижной каретки 6, оказывающих влияние на качество обработки пластины. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Привод перемещения координатного устройства, содержащий основание и жестко связанные с ним электродвигатель с редуктором и направляющую с расположенным вдоль нее бесконечным ремнем,соединенным с редуктором электродвигателя и подвижной кареткой, и модуль управления приводом ее перемещения, выход которого связан с электродвигателем, отличающийся тем, что привод снабжен модулем дополнительного тягового усилия, выполненным в виде установленного вдоль направляющей линейного электродвигателя, блоком определения амплитуды собственных колебаний подвижной каретки вдоль направляющей, узкополосным фильтром с полосой пропускания, соответствующей частоте собственных колебаний подвижной каретки, вибродатчиком, установленным на подвижной каретке, и блоком определения мощности, потребляемой электродвигателем, при этом якорь линейного электродвигателя жестко связан с подвижной кареткой, а его статор - жестко связан с основанием, причем выход блока определения амплитуды собственных колебаний подвижной каретки вдоль направляющей связан с входом модуля управления приводом перемещения подвижной каретки, выход узкополосного фильтра связан с входом блока определения амплитуды собственных колебаний подвижной каретки вдоль направляющей, выход вибродатчика связан с входом узкополосного фильтра, вход блока определения электрической мощности связан с электродвигателем, а его выход - с модулем управления приводом перемещения подвижной каретки. 2. Привод перемещения координатного устройства по п.1, отличающийся тем, что линейный электродвигатель модуля дополнительного тягового усилия выполнен в виде линейного электродвигателя,статор которого состоит из жестко связанного с основанием вала, установленного параллельно направляющей в отверстии подвижной каретки, при этом на валу установлены и жестко связаны с ней постоянные магниты, выполненные в виде втулок, а якорь состоит из катушек индуктивности, размещенных кооксиально валу статора в отверстии подвижной каретки и соединенных со вторым выходом модуля управления приводом перемещения подвижной каретки. 3. Привод перемещения координатного устройства по п.1, отличающийся тем, что линейный электродвигатель модуля дополнительного тягового усилия выполнен в виде линейного двигателя постоянного тока, якорь которого состоит из постоянных магнитов, установленных параллельно друг другу и направляющей и жестко связанных с подвижной кареткой, а ротор состоит из размещенной на стержне с прямоугольным поперечным сечением катушки, связанной со вторым выходом модуля перемещения приводом перемещения подвижной каретки, при этом стержень установлен между постоянными магнитами якоря параллельно направляющей и жестко связан с основанием. 4. Способ управления тяговым усилием привода перемещения координатного устройства по п.1,включающий определение параметров, характеризующих изменение внешней нагруженности привода перемещения координатного устройства, формирование на их основе команды на изменение параметров основного тягового усилия и изменение в соответствии с этой командой параметров электропитания привода перемещения координатного устройства, обеспечивающих требуемое изменение основного тягового усилия, отличающийся тем, что для определения параметров, характеризующих изменение внешней нагруженности привода перемещения координатного устройства, предварительно определяют тяговое усилие перемещения подвижной каретки привода в режиме холостого хода с заданной скоростью ее подачи и частоту собственных колебаний подвижной каретки в направлении ее перемещения, при этом командой на изменение тягового усилия одновременно с основным формируют дополнительное тяговое усилие, создаваемое модулем дополнительного тягового усилия с линейным электродвигателем и при разгоне подвижной каретки его прилагают непосредственно к ней в направлении движения подвижной каретки, причем основным тяговым усилием при разгоне подвижной каретки обеспечивают упругое деформирование ременной передачи до величины, соответствующей его деформированию при движении подвижной каретки в режиме холостого хода, а дополнительным тяговым усилием обеспечивают ускорение разгона подвижной каретки по параболическому закону со снижением его до нуля при достижении заданной скорости подачи подвижной каретки, при этом команду на изменения во времени основного и дополнительного тяговых усилий формируют в соответствии с зависимостями: где Fdc(t) - изменение основного тягового усилия во времени при разгоне подвижной каретки, H;Fxx - тяговое усилие при движении подвижной каретки при ее движении в режиме холостого хода с заданной скоростью подачи, H;Fda(t) - изменение дополнительного тягового усилия во времени при разгоне подвижной каретки, H;t - текущее время при разгоне подвижной каретки до требуемой скорости подачи S, с;tp - интервал времени от начала движения подвижной каретки до достижения ею требуемой скорости подачи, с;t1 - интервал времени, при котором суммарное значение основного и дополнительного тягового усилия достигает значения Fxx, t1=(0,05-0,5)tp, c,при этом в процессе движения подвижной каретки после достижения требуемой скорости подачи определяют амплитуду ее собственных колебаний в направлении движения, например, пьезоэлектрическим датчиком, сигнал с которого обрабатывают узкополосной фильтрацией, и для снижения амплитуды собственных колебаний дополнительное тяговое усилие Fdv прикладывают к подвижной каретке в противофазе этим колебаниям с их частотой.
МПК / Метки
МПК: B23Q 5/28, H02K 41/035
Метки: привод, управления, перемещения, координатного, устройства, способ
Код ссылки
<a href="https://eas.patents.su/10-24502-privod-peremeshheniya-koordinatnogo-ustrojjstva-i-sposob-ego-upravleniya.html" rel="bookmark" title="База патентов Евразийского Союза">Привод перемещения координатного устройства и способ его управления</a>
Выкатной элемент с механизмом раздельного перемещения в шкафу комплектного распределительного устройства

Номер патента: 2783
Опубликовано: 29.08.2002
Авторы: Хоменчук Борис Евстафиевич, Мельник Ярослав Владимирович, Цымбалюк Леонид Мойсеевич
МПК: H02B 11/02
Метки: элемент, шкафу, комплектного, раздельного, устройства, выкатной, механизмом, перемещения, распределительного
Формула / Реферат:
Выкатной элемент с механизмом раздельного перемещения содержит раму с выключателем, механизм педальной блокировки фасадной панели с опорными изоляторами, кронштейн для поднятия шторочных защитных экранов и нижний заземляющий контакт, отличающийся тем, что рама изготовлена разделенной на подвижную и неподвижную части по отношению к шкафу, а механизм раздельного перемещения выполнен в виде упорного винта, в осевом отверстии которого размещен шток...
Способ и система управления направлением перемещения в системе наклонно-направленного бурения
Номер патента: 18610
Опубликовано: 30.09.2013
Авторы: Джонсон Эшли, Шеппард Майкл, Даунтон Джеффри
МПК: E21B 7/06
Метки: система, способ, перемещения, системе, наклонно-направленного, направлением, управления, бурения
Формула / Реферат:
1. Способ управления системой наклонно-направленного бурения, содержащий оборудование низа бурильной колонны, включающее в себя буровое долото для наклонно-направленного бурения ствола скважины в пласте земли, содержащий следующие стадии:управление направлением перемещения системы наклонно-направленного бурения, содержащее использование стационарного относительно ствола скважины комплекта неконцентрически присоединенных калибрующих элементов для...
Устройство дистанционного управления и способ конфигурирования устройства дистанционного управления
Номер патента: 4552
Опубликовано: 24.06.2004
Автор: Нильсен Мартин Сандал
МПК: G07C 9/00
Метки: устройство, управления, конфигурирования, дистанционного, способ, устройства
Формула / Реферат:
1. Устройство дистанционного управления для приведения в действие по меньшей мере одного управляемого блока, такого как приводное устройство, связанное с подвижным элементом, таким как дверь, ворота, окно, шторы, ставни или занавески, тент или тому подобное, причем устройство дистанционного управления содержит блок дистанционного управления и по меньшей мере один дистанционно управляемый блок, выполненные таким образом, что блок дистанционного...
Устройства для регистрации и обработки информации и устройства управления машиной/системой, оборудованной датчиками отпечатков пальцев
Номер патента: 1859
Опубликовано: 27.08.2001
Автор: Тамори Терухико
МПК: G06N 1/00
Метки: информации, обработки, оборудованной, регистрации, отпечатков, устройства, датчиками, пальцев, управления
Формула / Реферат:
1. Плоское устройство регистрации и обработки информации, которое отличается наличием тонкого датчика для обнаружения отпечатков пальцев и блока преобразования, который преобразовывает данные отпечатка пальца, обнаруженные датчиком отпечатков пальцев, в цифровые электрические сигналы. 2. Плоское устройство регистрации и обработки информации, которое отличается наличием тонкого датчика для обнаружения отпечатков пальцев, блока памяти, который...
Способы перемещения объекта и генерации электричества и энергии и устройства для их осуществления
Номер патента: 5801
Опубликовано: 30.06.2005
Авторы: Гидвани Джавахар М., Зуперро Антони С.
МПК: C25B 5/00
Метки: объекта, устройства, электричества, генерации, осуществления, способы, энергии, перемещения
Формула / Реферат:
1. Способ генерации электричества путем осуществления химической реакции на катализаторе, сопровождающейся ИК-излучением, в котором указанная каталитическая реакция протекает в оптическом резонаторе, который обеспечивает стимулирование ИК-излучения на высших гармониках, генерируемое химической реакцией, а выходящее из резонатора ИК-излучение используют для генерации электричества. 2. Способ по п.1, в котором катализатор работает при пиковой...
Предыдущий патент: Аминсодержащий абсорбент и способ абсорбции кислых газов из газовых смесей
Следующий патент: Способ получения инулинсодержащего раствора, инулина, фруктоолигосахаридов
Случайный патент: Способ получения подгузника типа трусов одноразового использования (варианты) и подгузник типа трусов, полученный этим способом