Станция динамического зондирования грунтов и молот для станции динамического зондирования грунтов
Номер патента: 15983
Опубликовано: 30.01.2012
Авторы: Махнач Алексей Владимирович, Миклашевский Сергей Николаевич, Камышлеев Александр Александрович, Дорофейчик Сергей Витальевич, Гутник Виктор Леонидович
Формула / Реферат
1. Станция динамического зондирования грунта, содержащая связанные между собой линиями питания и информационными линиями, снабженными соответствующими интерфейсами, зонд со штангами и электронную измерительную систему с датчиками, а также ударное устройство с подвижным грузом-бойком и средства извлечения зонда из грунта, отличающаяся тем, что ударное устройство представляет собой установленный на направляющей опоре молот, снабженный рычагом управления подъемом и содержащий гидромотор, выполненный с возможностью привода механизма цепной передачи, размещенного в кожухе и выполненного с возможностью размыкаемой кинематической связи с бойком, установленным с возможностью совершения возвратно-поступательного перемещения в предусмотренном в кожухе вертикальном направляющем канале, с нижней стороны которого установлен подпятник, выполненный с возможностью передачи вертикального ударного воздействия бойка на установленную в нем штангу зонда, измерительная система содержит измерительный преобразователь глубины погружения зонда; информационно связанный по меньшей мере с одним датчиком глубины погружения, и преобразователь ударов бойка молота в электрические импульсы, информационно связанный с измерительным преобразователем глубины погружения зонда, механически жестко связанный с направляющей опорой и кинематически связанный с рычагом управления подъемом молота, причем преобразователь глубины погружения зонда и преобразователь ударов бойка молота в электрические импульсы через распределительный блок связаны с программируемым регистратором динамического зондирования.
2. Станция по п.1, отличающаяся тем, что регистратор динамического зондирования содержит, по меньшей мере, связанные с микроконтроллером дисплей, выполненный с возможностью отображения информации в графическом виде в реальном масштабе времени и в режиме считывания записей, сохраненных по меньшей мере на одной карте памяти, по меньшей мере один информационный вход, по меньшей мере один информационный выход, выполненный с возможностью связи с внешним средством обработки данных, органы управления и источник автономного питания.
3. Станция по любому из пп.1 или 2, отличающаяся тем, что измерительный преобразователь глубины погружения зонда содержит измерительную трубку, механически жестко связанную с направляющей опорой, с размещенным на трубке с возможностью перемещения вдоль оси трубки ползунком с магнитом и размещенным в трубке множеством датчиков положения, выполненных предпочтительно в виде датчиков Холла, связанных с микроконтроллером с платы управления преобразователя.
4. Станция по любому из пп.1-3, отличающаяся тем, что преобразователь ударов бойка молота в электрические импульсы содержит связанный с микроконтроллером измерительного преобразователя глубины погружения зонда датчик индуктивности, установленный на кожухе молота с возможностью формирования электрического импульса при прохождении в зоне установки датчика средства размыкания кинематической связи с бойком, выполненного в виде размещенного на цепи металлического зуба.
5. Молот станции динамического зондирования по любому из пп.1-4, снабженный рычагом управления подъемом и содержащий гидромотор, выполненный с возможностью привода механизма цепной передачи, размещенного в кожухе и выполненного с возможностью размыкаемой кинематической связи с бойком, установленным с возможностью совершения возвратно-поступательного перемещения в предусмотренном в кожухе вертикальном направляющем канале, с нижней стороны которого установлен подпятник, выполненный с возможностью передачи ударного воздействия бойка на зонд.
6. Молот по п.5, отличающийся тем, что механизм цепной передачи содержит расположенные на одной вертикали ведомую звездочку и связанную с выходным валом гидромотора ведущую звездочку, а также установленную на звездочках с формированием направленной вверх и направленной вниз ветвей цепь, по меньшей мере одно из звеньев которой снабжено жестко связанным со звеном цепи элементом зацепления с бойком, при этом боек снабжен ответным элементом зацепления, причем длина ветвей цепи и шаг установки элементов зацепления на цепи выбраны с возможностью формирования кинематической связи между элементом зацепления цепи и ответным элементом зацепления бойка с перемещением бойка снизу вверх на заданную высоту и последующим размыканием кинематической связи с обеспечением перемещения бойка сверху вниз под действием силы тяжести.
7. Молот по любому из пп.5 или 6, отличающийся тем, что элемент зацепления цепи выполнен в виде зуба, а ответный элемент зацепления бойка выполнен в виде выступа, предпочтительно расположенного по всему периметру поперечного сечения бойка.

Текст
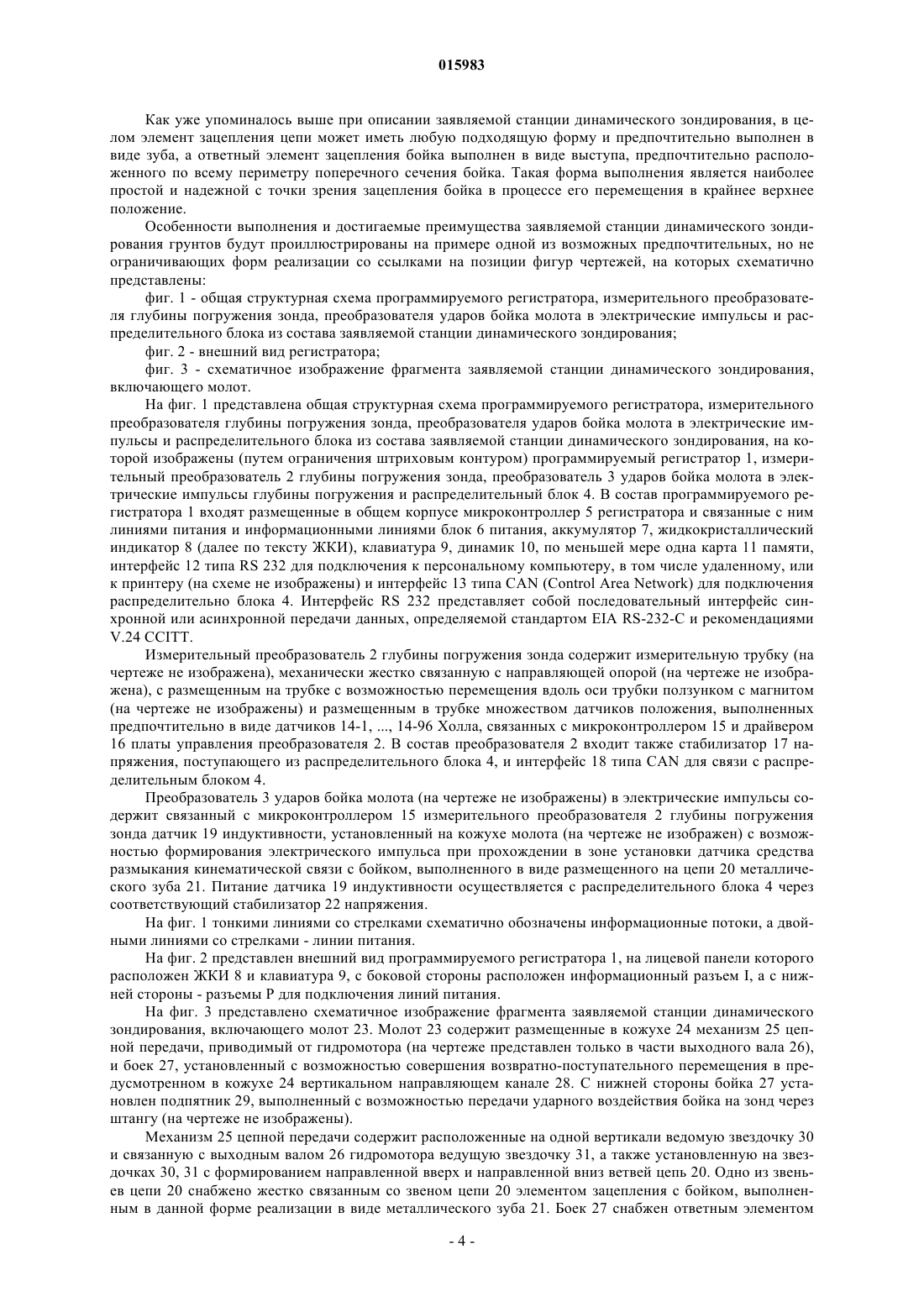
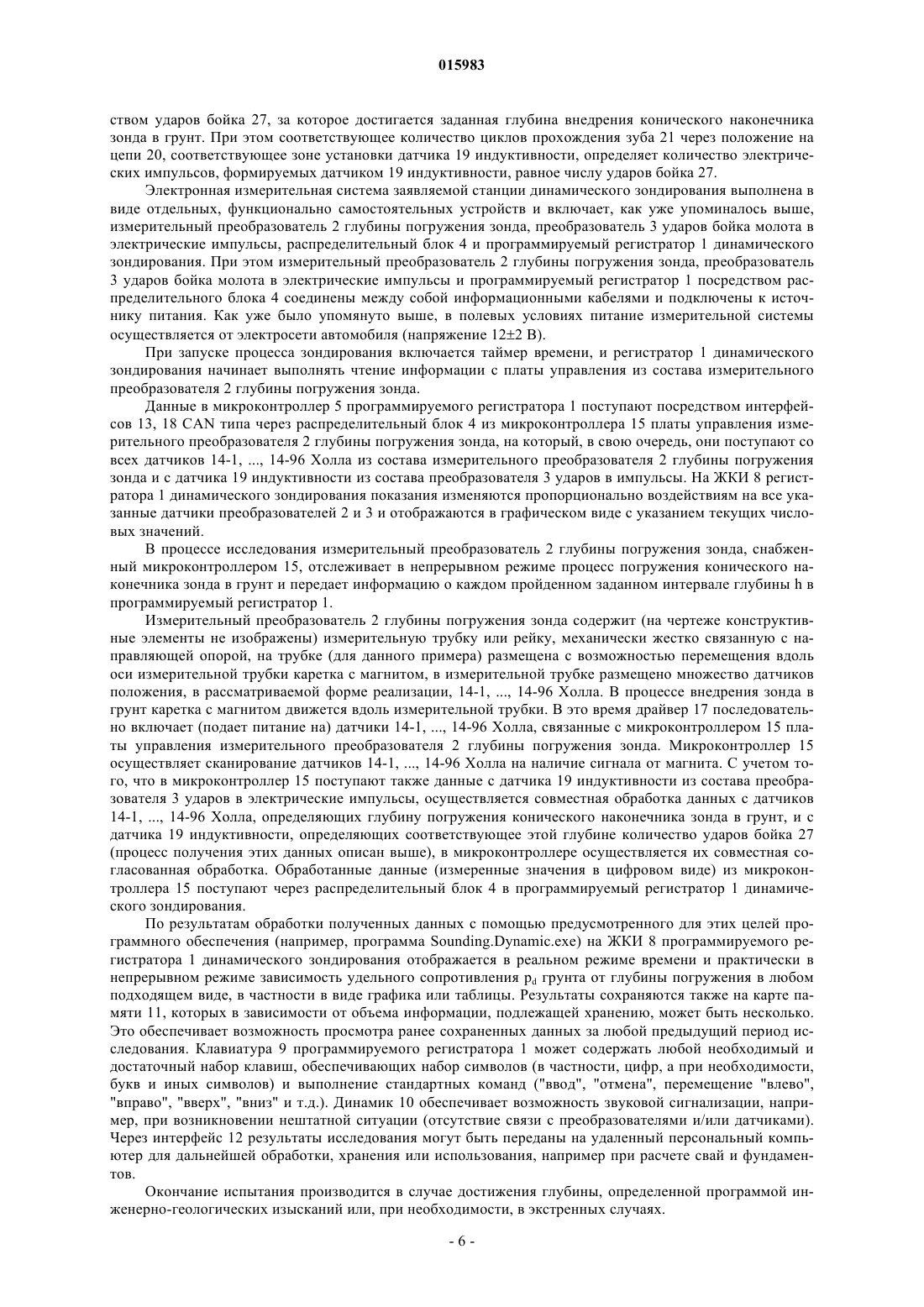
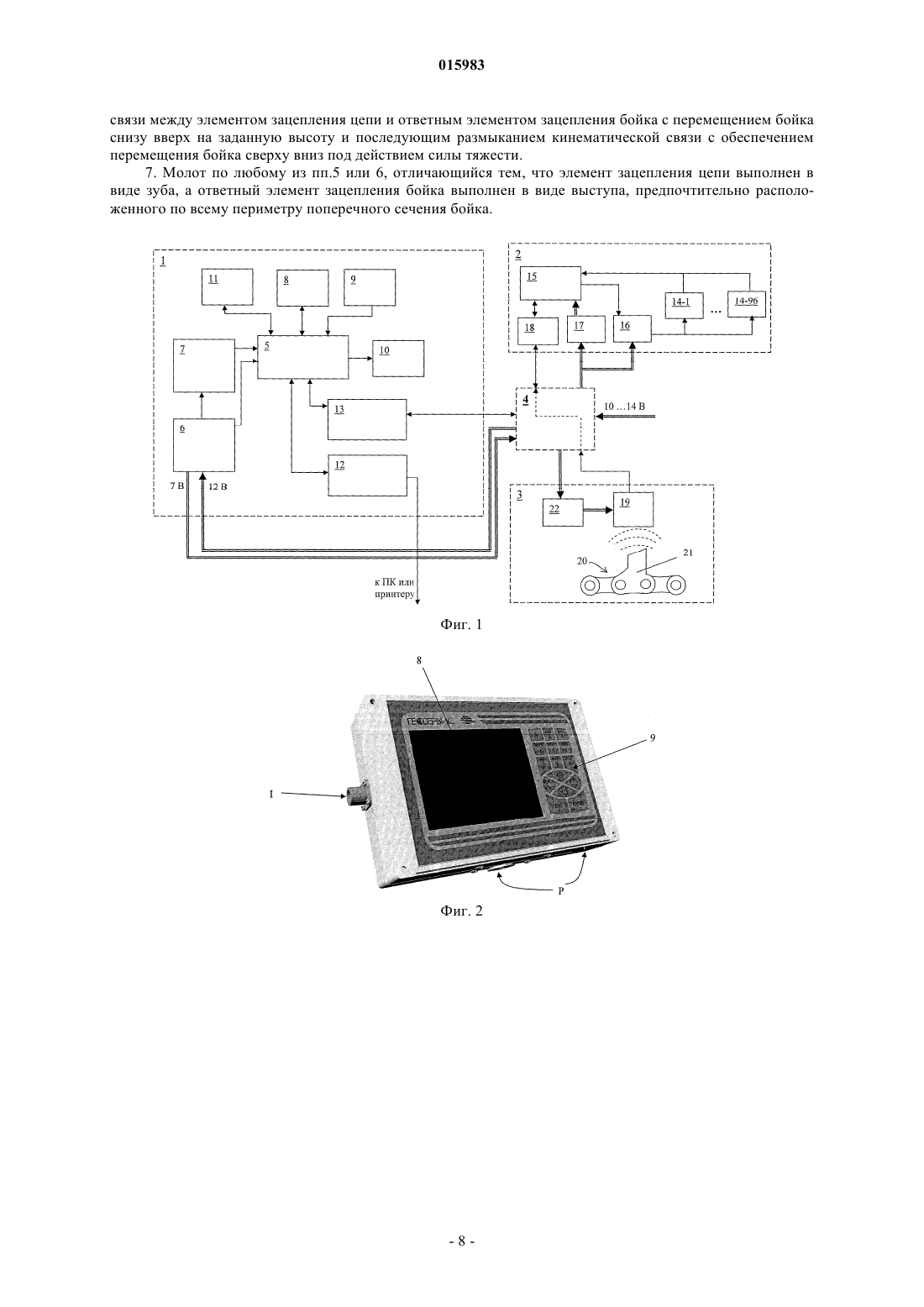
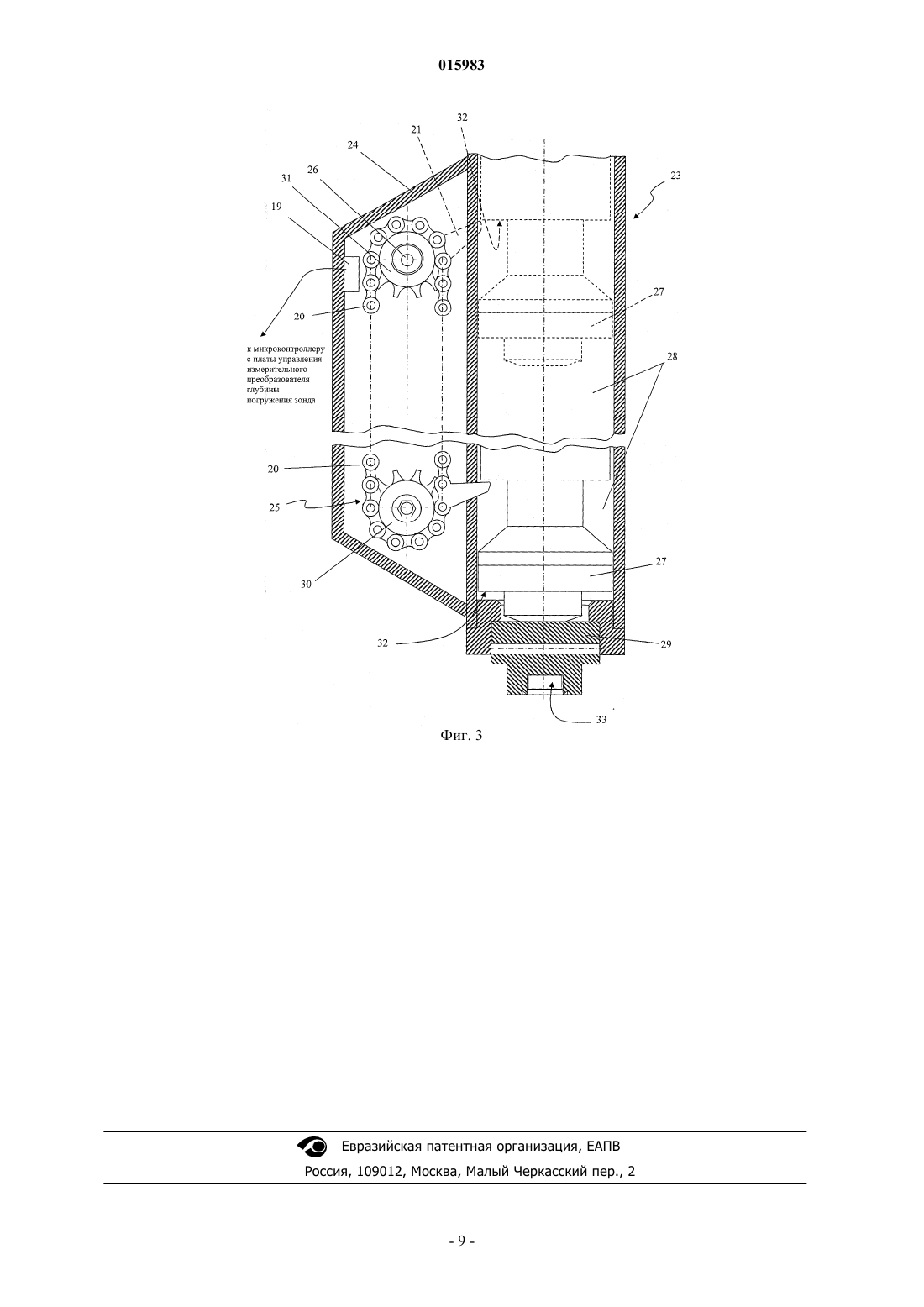
ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ЕВРАЗИЙСКОМУ ПАТЕНТУ Дата публикации и выдачи патента СТАНЦИЯ ДИНАМИЧЕСКОГО ЗОНДИРОВАНИЯ ГРУНТОВ И МОЛОТ ДЛЯ СТАНЦИИ ДИНАМИЧЕСКОГО ЗОНДИРОВАНИЯ ГРУНТОВ Заявляемое изобретение относится к устройствам для геологических исследований грунта методом динамического зондирования, в частности для геологического исследования грунта путем определения удельного сопротивления грунта на различной глубине. Предложена станция динамического зондирования грунта, содержащая связанные между собой зонд со штангами и электронную измерительную систему с датчиками, а также ударное устройство с подвижным грузом-бойком и средства извлечения зонда из грунта. Ударное устройство представляет собой установленный на направляющей опоре молот, содержащий гидромотор,выполненный с возможностью привода механизма цепной передачи, размещенного в кожухе и выполненного с возможностью размыкаемой кинематической связи с бойком, выполненным с возможностью передачи вертикального ударного воздействия на подпятник и далее на установленную в подпятнике штангу зонда. Измерительная система содержит измерительный преобразователь глубины погружения зонда, информационно связанный по меньшей мере с одним датчиком глубины погружения, и преобразователь ударов бойка молота в электрические импульсы, информационно связанный с измерительным преобразователем глубины погружения зонда, механически жестко связанный с направляющей опорой и кинематически связанный с рычагом управления подъемом молота, причем преобразователь глубины погружения зонда и преобразователь ударов бойка молота в электрические импульсы через распределительный блок связаны с программируемым регистратором динамического зондирования. Миклашевский Сергей Николаевич,Камышлеев Александр Александрович, Гутник Виктор Леонидович, Дорофейчик Сергей Витальевич, Махнач Алексей Владимирович (BY) Беляева Е.Н. (BY)(71)(73) Заявитель и патентовладелец: ПРОИЗВОДСТВЕННОЕ РЕСПУБЛИКАНСКОЕ УНИТАРНОЕ ПРЕДПРИЯТИЕ 015983 Заявляемое изобретение относится к устройствам для геологических исследований грунта методом динамического зондирования, в частности для геологического исследования грунта путем определения удельного сопротивления грунта на различной глубине. Более конкретно, изобретение относится к станции динамического зондирования, которая может использоваться, в том числе в качестве дополнительного оборудования к геологическим буровым установкам и может быть использована для комплексной оценки физико-механических свойств грунтов при инженерных изысканиях в строительстве или при геологических изысканиях. Наиболее широкое распространение оценка физико-механических свойств грунтов находит при инженерных изысканиях в строительстве. Повышение эффективности и качества строительства в значительной степени зависит от правильного выбора фундаментов сооружений, основанного на полном использовании несущей способности грунтов оснований. При этом объективные характеристики несущей способности грунтов можно получить именно по результатам исследований физико-механических характеристик грунтов в инженерно-геологических условиях строительных площадок. В этой связи большое распространение получают полевые методы исследований грунтов в условиях их естественного залегания, позволяющие исследовать и такие грунты, отбор образцов из которых практически невозможен. Динамическое зондирование, наряду со статическим, является одним из наиболее эффективных полевых методов испытания грунтов в условиях их естественного залегания. Фактически статическое и динамическое зондирования позволяют определять свойства грунтов, но различными методами. Динамическое зондирование менее трудоемко и проще в исполнении, нежели статическое. Из-за простоты конструкций установок динамического зондирования, их небольшой массы, удобства в обслуживании при значительной производительности этот метод является наиболее распространенным во многих странах мира. Однако область его применения все же несколько уже по сравнению со статическим, поскольку ему нельзя подвергать пылеватые водонасыщенные пески, мягко- и текучепластичные и текучие глины и суглинки, пластичные и текучие супеси. Динамическое зондирование применяется в комплексе с другими лабораторными и полевыми методами для выделения инженерно-геологических элементов (толщины слоев и линз, границ распространения слоев и линз, границ распространения грунтов различных видов и разновидностей), для оценки пространственной изменчивости состава и свойств грунтов, для определения глубины залегания кровли скальных и крупнообломочных грунтов, для количественной оценки характеристик физикомеханических свойств грунтов (плотности, модуля деформации, угла внутреннего трения и сцепления грунтов и др.), для определения степени уплотнения и упрочнения грунтов во времени и пространстве,для оценки возможности забивки свай и определения глубины их погружения, для определения данных для расчета свайных фундаментов, для выбора мест расположения опытных площадок и глубины проведения полевых испытаний, а также мест отбора образцов грунтов для лабораторных испытаний и для контроля качества геотехнических работ. Динамическое зондирование, как правило, проводят забивкой или вибропогружением в грунт зонда с одновременным измерением непрерывно (или через заданные интервалы по глубине) показателей, характеризующих сопротивление грунта внедрению зонда. В частности, динамическое зондирование состоит в забивке в грунт стандартного конического зонда и измерении глубины его погружения от определенного числа ударов молота или, обратно, при задании установленной глубины забивки с измерением требуемого для этого числа ударов. При динамическом ударном зондировании измеряют глубину погружения зонда h от определенного числа ударов молота (залога). По данным измерений вычисляют условное динамическое сопротивление грунта погружению зонда pd и строятся графики изменения по глубине условного динамического сопротивления. Для определения условного динамического сопротивления грунта погружению зонда применяется,как правило, установка средней степени тяжести, позволяющая зондировать до глубины 15-20 м (условное динамическое сопротивление до 20 МПа), а также тяжелая установка динамического зондирования,исследующая грунты до глубин 35-40 м (условное динамическое сопротивление до 40 МПа). В состав установки для испытания грунта динамическим зондированием, в общем случае, должны входить зонд (набор штанг и конический наконечник); ударное устройство для погружения зонда (молот или вибромолот); опорно-анкерное устройство (рама с направляющими стойками); устройства для измерения глубины погружения зонда или скорости погружения зонда [1]. Наиболее широко указанный комплект оборудования для динамического зондирования включают в состав буровых установок. Так, известна, например, установка УБП-15 М (буровая пенетрационная модернизированная) для ударно-канатного бурения скважин на глубину до 15 м, разработанная институтом Гидропроект, в комплект которой входит навесное приспособление для зондирования [2]. Известен также комплект инструментов динамического зондирования КДЗ-001, разработанный ОАО "Геомаш", который может использоваться в составе буровых установок и который содержит зонд (набор из 20 штанг и конический наконечник), счетчик ходов молота, указатель наклона вертикальности, ударный механизм для погружения зонда, экстрактор для извлечения штанг динамического зондирования, опорноцентрирующую плиту, гидропривод [3].-1 015983 Все известные установки и/или комплекты оборудования для динамического зондирования, как правило, отличаются типом привода ударного механизма (наиболее распространен гидропривод, но известны также установки с пневмоприводом [4] и т.д.), а также типом самого механизма привода, типом используемого датчика глубины погружения, типом используемого счетчика ударов молота. Анализ уровня техники показал, что в качестве наиболее близкой к заявляемой станции динамического зондирования грунта по совокупности своих существенных признаков может быть принята конструкция устройства для динамического зондирования грунтов, содержащего зонд-разборную штангу с конусным наконечником, измерительную систему с датчиками, ударное устройство в виде соединенных наковальни и направляющей с подвижным грузом-бойком и средства извлечения зонда из грунта, в котором наконечник зонда имеет особую сложную конструкцию, и в нем установлены датчик измерения электрического сопротивления грунта, акселерометр-датчик измерения перемещения зонда и тензорезисторы [5]. Измерительная система с датчиками выполнена электронной, снабжена тремя нормирующими усилителями, из которых один связан с датчиком измерения электрического сопротивления грунта, другой - с акселерометром, третий - с тензорезисторами, а каждый из датчиков связан с отдельным АЦП сигналов для микропроцессора, который через радиоприемопередающий модуль связан с блоком информации-управления в виде второго радиоприемопередающего модуля, связанного через передаточный модуль с управляющим процессором. Все элементы измерительной системы, кроме блока информацииуправления, смонтированы в наконечнике и корпусе зонда. Такая система является более современной с точки зрения возможностей обработки информации, получаемой с зонда, но в то же время достаточна сложна по своей конструкции и не обеспечивает возможность полной обработки полученных данных в автоматическом режиме с их визуализацией на месте проведения исследования. Кроме того, в рассматриваемом источнике информации не раскрыты особенности регистрации глубины погружения зонда и особенности механизма управления ударным устройством, в частности положением груза бойка. Таким образом, задачей изобретения является создание станции динамического зондирования грунта, содержащей ударное устройство типа молота с гидроприводом и связанный с ним комплекс программно-аппаратных средств, необходимый и достаточный для обработки, хранения и визуализации полученных данных на месте исследования без привлечения дополнительных вычислительных (компьютерных) средств, которая может быть использована в составе любого устройства, снабженного гидроприводом с подходящими характеристиками. Станция должна обеспечивать с максимально возможной точностью получение данных с минимально возможным шагом по глубине. Кроме того, станция должна обеспечивать возможность получения данных в визуализированном виде неквалифицированным персоналом рабочих специальностей непосредственно на месте исследования в режиме реального времени с сохранением возможности связи (пересылки данных) на удаленный компьютер, а также возможность получения архивной информации за предыдущий заданный период исследования без обращения к базе данных удаленного компьютера. Конструкция станции в целом и отдельных ее блоков и элементов, в том числе молота, должна быть максимально простой, в том числе с точки зрения управления, и максимально надежной. Поставленная задача решается заявляемой станцией динамического зондирования грунта, содержащей связанные между собой линии питания и информационные линии, снабженные соответствующими интерфейсами, зонд со штангами и электронную измерительную систему с датчиками, а также ударное устройство с подвижным грузом-бойком и средства извлечения зонда из грунта. Поставленная задача решается за счет того, что ударное устройство представляет собой установленный на направляющей опоре молот, снабженный рычагом управления подъемом и содержащий гидромотор выполненный с возможностью привода механизма цепной передачи, размещенного в кожухе и выполненного с возможностью размыкаемой кинематической связи с бойком, установленным с возможностью совершения возвратно-поступательного перемещения в предусмотренном в кожухе вертикальном направляющем канале, с нижней стороны которого установлен подпятник, выполненный с возможностью передачи вертикального ударного воздействия бойка на установленную в нем штангу зонда, измерительная система содержит измерительный преобразователь глубины погружения зонда, информационно связанный по меньшей мере с одним датчиком глубины погружения, и преобразователь ударов бойка молота в электрические импульсы, информационно связанный с измерительным преобразователем глубины погружения зонда, механически жестко связанный с направляющей опорой и кинематически связанный с рычагом управления подъемом молота, причем преобразователь глубины погружения зонда и преобразователь ударов бойка молота в электрические импульсы через распределительный блок связаны с программируемым регистратором динамического зондирования. Использование в заявляемой станции снабженного средством размыкания кинематической связи механизма цепной передачи с бойком позволяет достаточно простым и эффективным, в том числе с точки зрения энергозатрат, образом осуществлять подъем бойка в верхнее положение. При этом средство размыкания кинематической связи может быть выполнено любым подходящим образом, например с возможностью обеспечения простого механического контакта путем "зацепления" бойка молота, находящегося в крайнем нижнем положении после передачи вертикального ударного воздействия на штангу, и его перемещения в таком "зацепленном" положении средством размыкания кинематической связи верти-2 015983 кально вверх согласованно с соответствующей ветвью цепи с последующим выходом из "зацепления" при достижении бойком крайнего верхнего положения. В простейших формах реализации средство размыкания кинематической связи может быть выполнено в виде зацепа подходящей формы, например в виде металлического зуба, размещенного на цепи (например, жестко установленного на соответствующем звене цепи). Наличие в измерительной системе измерительного преобразователя глубины погружения зонда,информационно связанного по меньшей мере с одним датчиком глубины погружения, и преобразователя ударов бойка молота в электрические импульсы, информационно связанного с измерительным преобразователем глубины погружения зонда, механически жестко связанного с направляющей опорой и кинематически связанного с рычагом управления подъемом молота, а также связь через распределительный блок преобразователя глубины погружения зонда и преобразователя ударов бойка молота в электрические импульсы с программируемым регистратором динамического зондирования обеспечивают возможность реализации простой схемы согласованного сбора информации со всех датчиков и ее передачи в программируемый регистратор для дальнейшей согласованной обработки с получением высокоточных результатов. В предпочтительных формах реализации заявляемой станции регистратор динамического зондирования содержит, по меньшей мере, связанные с микроконтроллером дисплей, выполненный с возможностью отображения информации в графическом виде в реальном масштабе времени и в режиме считывания записей, сохраненных по меньшей мере на одной карте памяти, по меньшей мере один информационный вход, по меньшей мере один информационный выход, выполненный с возможностью связи с внешним средством обработки данных, органы управления и источник автономного питания. Такая конструкция регистратора динамического зондирования с учетом современного уровня развития микроэлектроники обеспечивает возможность упрощения обработки данных, полученных с датчиков, с их визуализацией в любом подходящем виде (графическом, табличном и т.п.) прямо на месте испытания и в реальном режиме времени, и по запросу из архивной базы данных. Кроме того, имеющиеся органы управления или часть из них могут быть запрограммированы на выполнение определенной задачи, что обеспечивает возможность простого управления (например, путем нажатия одной клавиши) процессами измерения или тарировки, а также тестирования (в том числе в автоматическом режиме) работоспособности отдельных датчиков и всей станции в целом. В предпочтительных формах реализации измерительный преобразователь глубины погружения зонда содержит измерительную трубку, механически жестко связанную с направляющей опорой с размещенным на трубке с возможностью перемещения вдоль оси трубки ползунком с магнитом и размещенным в трубке множеством датчиков положения, выполненных предпочтительно в виде датчиков Холла, связанных с микроконтроллером платы управления преобразователя. Преобразователь ударов бойка молота в электрические импульсы в предпочтительных формах реализации содержит связанный с микроконтроллером измерительного преобразователя глубины погружения зонда датчик индуктивности, установленный на кожухе молота с возможностью формирования электрического импульса при прохождении в зоне установки датчика, выполненного в виде металлического зуба и размещенного на цепи средства размыкания кинематической связи с бойком. Такая форма выполнения, наряду с ее конструктивной простотой, обеспечивает возможность согласования обработки информации о глубине погружения зонда датчика и о количестве ударов бойка молота. Поставленная задача решается также заявляемым молотом из состава описанной выше станции динамического зондирования, который снабжен рычагом управления подъемом и содержит гидромотор,выполненный с возможностью привода механизма цепной передачи, размещенного в кожухе и выполненного с возможностью размыкаемой кинематической связи с бойком, установленным с возможностью совершения возвратно-поступательного перемещения в предусмотренном в кожухе вертикальном направляющем канале, с нижней стороны которого установлен подпятник, выполненный с возможностью передачи ударного воздействия бойка на зонд. При этом в предпочтительных формах реализации механизм цепной передачи содержит расположенные на одной вертикали ведомую звездочку и связанную с выходным валом гидромотора ведущую звездочку, а также установленную на звездочках с формированием направленной вверх и направленной вниз ветвей цепь, по меньшей мере одно из звеньев которой снабжено жестко связанным со звеном цепи элементом зацепления с бойком, при этом боек снабжен ответным элементом зацепления, причем длина ветвей цепи и шаг установки элементов зацепления на цепи выбраны с возможностью формирования кинематической связи между элементом зацепления цепи и ответным элементом зацепления бойка с перемещением бойка снизу вверх на заданную высоту и последующим размыканием кинематической связи с обеспечением перемещения бойка сверху вниз под действием силы тяжести.-3 015983 Как уже упоминалось выше при описании заявляемой станции динамического зондирования, в целом элемент зацепления цепи может иметь любую подходящую форму и предпочтительно выполнен в виде зуба, а ответный элемент зацепления бойка выполнен в виде выступа, предпочтительно расположенного по всему периметру поперечного сечения бойка. Такая форма выполнения является наиболее простой и надежной с точки зрения зацепления бойка в процессе его перемещения в крайнее верхнее положение. Особенности выполнения и достигаемые преимущества заявляемой станции динамического зондирования грунтов будут проиллюстрированы на примере одной из возможных предпочтительных, но не ограничивающих форм реализации со ссылками на позиции фигур чертежей, на которых схематично представлены: фиг. 1 - общая структурная схема программируемого регистратора, измерительного преобразователя глубины погружения зонда, преобразователя ударов бойка молота в электрические импульсы и распределительного блока из состава заявляемой станции динамического зондирования; фиг. 2 - внешний вид регистратора; фиг. 3 - схематичное изображение фрагмента заявляемой станции динамического зондирования,включающего молот. На фиг. 1 представлена общая структурная схема программируемого регистратора, измерительного преобразователя глубины погружения зонда, преобразователя ударов бойка молота в электрические импульсы и распределительного блока из состава заявляемой станции динамического зондирования, на которой изображены (путем ограничения штриховым контуром) программируемый регистратор 1, измерительный преобразователь 2 глубины погружения зонда, преобразователь 3 ударов бойка молота в электрические импульсы глубины погружения и распределительный блок 4. В состав программируемого регистратора 1 входят размещенные в общем корпусе микроконтроллер 5 регистратора и связанные с ним линиями питания и информационными линиями блок 6 питания, аккумулятор 7, жидкокристаллический индикатор 8 (далее по тексту ЖКИ), клавиатура 9, динамик 10, по меньшей мере одна карта 11 памяти,интерфейс 12 типа RS 232 для подключения к персональному компьютеру, в том числе удаленному, или к принтеру (на схеме не изображены) и интерфейс 13 типа CAN (Control Area Network) для подключения распределительно блока 4. Интерфейс RS 232 представляет собой последовательный интерфейс синхронной или асинхронной передачи данных, определяемой стандартом EIA RS-232-C и рекомендациямиV.24 CCITT. Измерительный преобразователь 2 глубины погружения зонда содержит измерительную трубку (на чертеже не изображена), механически жестко связанную с направляющей опорой (на чертеже не изображена), с размещенным на трубке с возможностью перемещения вдоль оси трубки ползунком с магнитом(на чертеже не изображены) и размещенным в трубке множеством датчиков положения, выполненных предпочтительно в виде датчиков 14-1, , 14-96 Холла, связанных с микроконтроллером 15 и драйвером 16 платы управления преобразователя 2. В состав преобразователя 2 входит также стабилизатор 17 напряжения, поступающего из распределительного блока 4, и интерфейс 18 типа CAN для связи с распределительным блоком 4. Преобразователь 3 ударов бойка молота (на чертеже не изображены) в электрические импульсы содержит связанный с микроконтроллером 15 измерительного преобразователя 2 глубины погружения зонда датчик 19 индуктивности, установленный на кожухе молота (на чертеже не изображен) с возможностью формирования электрического импульса при прохождении в зоне установки датчика средства размыкания кинематической связи с бойком, выполненного в виде размещенного на цепи 20 металлического зуба 21. Питание датчика 19 индуктивности осуществляется с распределительного блока 4 через соответствующий стабилизатор 22 напряжения. На фиг. 1 тонкими линиями со стрелками схематично обозначены информационные потоки, а двойными линиями со стрелками - линии питания. На фиг. 2 представлен внешний вид программируемого регистратора 1, на лицевой панели которого расположен ЖКИ 8 и клавиатура 9, с боковой стороны расположен информационный разъем I, а с нижней стороны - разъемы Р для подключения линий питания. На фиг. 3 представлено схематичное изображение фрагмента заявляемой станции динамического зондирования, включающего молот 23. Молот 23 содержит размещенные в кожухе 24 механизм 25 цепной передачи, приводимый от гидромотора (на чертеже представлен только в части выходного вала 26),и боек 27, установленный с возможностью совершения возвратно-поступательного перемещения в предусмотренном в кожухе 24 вертикальном направляющем канале 28. С нижней стороны бойка 27 установлен подпятник 29, выполненный с возможностью передачи ударного воздействия бойка на зонд через штангу (на чертеже не изображены). Механизм 25 цепной передачи содержит расположенные на одной вертикали ведомую звездочку 30 и связанную с выходным валом 26 гидромотора ведущую звездочку 31, а также установленную на звездочках 30, 31 с формированием направленной вверх и направленной вниз ветвей цепь 20. Одно из звеньев цепи 20 снабжено жестко связанным со звеном цепи 20 элементом зацепления с бойком, выполненным в данной форме реализации в виде металлического зуба 21. Боек 27 снабжен ответным элементом-4 015983 зацепления, выполненным в данной форме реализации в виде выступа 32, расположенного по всему периметру поперечного сечения бойка 27. На внутренней поверхности кожуха 24 установлен датчик 19 индуктивности, расположенный в зоне прохождения направленной вниз ветви цепи 20 с установленным на ней металлическим зубом 21. На фиг. 3 боек 27 и металлический зуб 21 изображены сплошной линией в положении формирования зацепления между ними и пунктирной линией - в положении выхода из зацепления для размыкания кинематической связи и обеспечения возможности свободного перемещения вертикально вниз (падения) бойка 27 в направляющем канале 28 под действием силы тяжести. Гнездо для установки штанги зонда в подпятнике 29 обозначено позицией 33. Заявляемая станция динамического зондирования работает следующим образом. Испытания проводят в соответствии с ГОСТ 19912-2001 (Грунты. Методы полевых испытаний статическим и динамическим зондированием) и ГОСТ 30672-99 (Грунты. Полевые испытания. Общие положения). В ходе испытаний определяют число n ударов молота при погружении зонда на интервал глубины h, соответствующий, например, 10 см, на основании чего определяют удельное динамическое сопротивление Pd грунта погружению зонда. На месте проведения работ по определению физико-механических свойств грунта станцию динамического зондирования переводят в соответствии с инструкцией из транспортного положения в рабочее. Программируемый регистратор 1 устанавливают, например, на штатив (на чертежах не изображен). Зондировочную штангу (на чертежах не изображена) с зондом с коническим наконечником устанавливают коническим наконечником в заданную точку грунта и с противоположного конца - в гнездо 33 подпятника 29, который затем устанавливают с нижней стороны вертикального направляющего канала 28, предусмотренного в кожухе 24 молота 23. Боек 27 молота 23 переводят в крайнее нижнее положение. При этом рычагом управления подъемом (на чертеже не изображен) переводят в нижнее положение и удерживают его в этом положении в процессе проведения испытания. Для проведения испытания в соответствии с инструкцией включают и переводят в рабочее состояние регистратор 1 динамического зондирования и осуществляют запуск молота 23. В полевых условиях питание распределительного блока 4 и соответственно программируемого регистратора 1 динамического зондирования измерительного преобразователя 2 глубины погружения зонда и преобразователя 3 ударов в импульсы может осуществляться от сети самоходного транспортного средства (U=12-242 В) через блок питания 6 из состава программируемого регистратора 1 динамического зондирования (U вых=7 В) или автономно от аккумулятора 7 также из состава программируемого регистратора 1. При запуске процесса зондирования включается таймер времени (на чертежах не обозначен) из состава программируемого регистратора 1 динамического зондирования, и через распределительный блок 4 осуществляется считывание информации, одновременно поступающей в ходе испытания в микроконтроллер 15 измерительного преобразователя 2 глубины погружения зонда с датчиков 14-1, , 14-96 Холла из состава этого преобразователя 2 и с датчика 19 индуктивности из состава преобразователя 3 ударов в импульсы. Информационные процессы в измерительной системе будут рассмотрены более подробно ниже. Молот 23 приводится в движение с помощью гидростанции, которой оборудовано самоходное транспортное средство, на котором размещена заявляемая станция динамического зондирования грунта. Под давлением масла, создаваемым гидростанцией установки динамического зондирования, гидромотор через свой выходной вал 26 передает крутящий момент на ведущую звездочку 31 и, тем самым, приводит в движение механизм 25 цепной передачи, содержащий, кроме указанной ведущей звездочки 31, ведомую звездочку 30 и установленную на звездочках цепь 20. Установленный на цепи 20 металлический зуб 21 при прохождении направленной вверх ветви цепи 20 захватывает боек 27, находящийся в крайнем нижнем положении (на фиг. 3 обозначено сплошной линией), формируя кинематическую связь (механическое зацепление с выступом 32, выполненным на бойке 27), и поднимает боек 27 вертикально вверх в направляющем канале 28 кожуха 24 в крайнее верхнее положение (на фиг. 3 обозначено пунктирной линией), в котором зацепление "размыкается" за счет того, что зуб 21 через ведущую звездочку 31 перемещается на направленную вниз ветвь цепи 20. В этой верхней точке траектории боек 27 сбрасывается с зуба 21 и под действием силы тяжести свободно падает в направляющем канале 28 вертикально вниз,ударяя по подпятнику 29 и, тем самым, по торцу штанги зонда. Под действием удара конический наконечник зонда динамического зондирования погружается в грунт на определенную, зависящую, в том числе от механических свойств грунта глубину. После того как металлический зуб 21 через ведущую звездочку 31 перемещается на направленную вниз ветвь цепи 20, он проходит через зону установки на внутренней поверхности кожуха 24 датчика 19 индуктивности. В момент "прохождения" через указанную зону металлического зуба 21 датчик 19 индуктивности формирует соответствующий электрический сигнал, который через распределительный блок 4 поступает в микроконтроллер 15 измерительного преобразователя 2 глубины погружения зонда. Далее зуб 21 через ведомое колесо 30 перемещается на направленную вверх цепь 20 и снова вводится в зацепление с выступом 32 бойка 27, находящего в этот момент на подпятнике 29 в своем крайнем нижнем положении, и перемещает боек 27 вертикально вверх в направляющем канале 28 описанным выше образом. Количество циклов прохождения зуба 21 через положение на цепи 20, соответствующее крайнему нижнему положению бойка 27, определяется количе-5 015983 ством ударов бойка 27, за которое достигается заданная глубина внедрения конического наконечника зонда в грунт. При этом соответствующее количество циклов прохождения зуба 21 через положение на цепи 20, соответствующее зоне установки датчика 19 индуктивности, определяет количество электрических импульсов, формируемых датчиком 19 индуктивности, равное числу ударов бойка 27. Электронная измерительная система заявляемой станции динамического зондирования выполнена в виде отдельных, функционально самостоятельных устройств и включает, как уже упоминалось выше,измерительный преобразователь 2 глубины погружения зонда, преобразователь 3 ударов бойка молота в электрические импульсы, распределительный блок 4 и программируемый регистратор 1 динамического зондирования. При этом измерительный преобразователь 2 глубины погружения зонда, преобразователь 3 ударов бойка молота в электрические импульсы и программируемый регистратор 1 посредством распределительного блока 4 соединены между собой информационными кабелями и подключены к источнику питания. Как уже было упомянуто выше, в полевых условиях питание измерительной системы осуществляется от электросети автомобиля (напряжение 122 В). При запуске процесса зондирования включается таймер времени, и регистратор 1 динамического зондирования начинает выполнять чтение информации с платы управления из состава измерительного преобразователя 2 глубины погружения зонда. Данные в микроконтроллер 5 программируемого регистратора 1 поступают посредством интерфейсов 13, 18 CAN типа через распределительный блок 4 из микроконтроллера 15 платы управления измерительного преобразователя 2 глубины погружения зонда, на который, в свою очередь, они поступают со всех датчиков 14-1, , 14-96 Холла из состава измерительного преобразователя 2 глубины погружения зонда и с датчика 19 индуктивности из состава преобразователя 3 ударов в импульсы. На ЖКИ 8 регистратора 1 динамического зондирования показания изменяются пропорционально воздействиям на все указанные датчики преобразователей 2 и 3 и отображаются в графическом виде с указанием текущих числовых значений. В процессе исследования измерительный преобразователь 2 глубины погружения зонда, снабженный микроконтроллером 15, отслеживает в непрерывном режиме процесс погружения конического наконечника зонда в грунт и передает информацию о каждом пройденном заданном интервале глубины h в программируемый регистратор 1. Измерительный преобразователь 2 глубины погружения зонда содержит (на чертеже конструктивные элементы не изображены) измерительную трубку или рейку, механически жестко связанную с направляющей опорой, на трубке (для данного примера) размещена с возможностью перемещения вдоль оси измерительной трубки каретка с магнитом, в измерительной трубке размещено множество датчиков положения, в рассматриваемой форме реализации, 14-1, , 14-96 Холла. В процессе внедрения зонда в грунт каретка с магнитом движется вдоль измерительной трубки. В это время драйвер 17 последовательно включает (подает питание на) датчики 14-1, , 14-96 Холла, связанные с микроконтроллером 15 платы управления измерительного преобразователя 2 глубины погружения зонда. Микроконтроллер 15 осуществляет сканирование датчиков 14-1, , 14-96 Холла на наличие сигнала от магнита. С учетом того, что в микроконтроллер 15 поступают также данные с датчика 19 индуктивности из состава преобразователя 3 ударов в электрические импульсы, осуществляется совместная обработка данных с датчиков 14-1, , 14-96 Холла, определяющих глубину погружения конического наконечника зонда в грунт, и с датчика 19 индуктивности, определяющих соответствующее этой глубине количество ударов бойка 27(процесс получения этих данных описан выше), в микроконтроллере осуществляется их совместная согласованная обработка. Обработанные данные (измеренные значения в цифровом виде) из микроконтроллера 15 поступают через распределительный блок 4 в программируемый регистратор 1 динамического зондирования. По результатам обработки полученных данных с помощью предусмотренного для этих целей программного обеспечения (например, программа Sounding.Dynamic.exe) на ЖКИ 8 программируемого регистратора 1 динамического зондирования отображается в реальном режиме времени и практически в непрерывном режиме зависимость удельного сопротивления pd грунта от глубины погружения в любом подходящем виде, в частности в виде графика или таблицы. Результаты сохраняются также на карте памяти 11, которых в зависимости от объема информации, подлежащей хранению, может быть несколько. Это обеспечивает возможность просмотра ранее сохраненных данных за любой предыдущий период исследования. Клавиатура 9 программируемого регистратора 1 может содержать любой необходимый и достаточный набор клавиш, обеспечивающих набор символов (в частности, цифр, а при необходимости,букв и иных символов) и выполнение стандартных команд ("ввод", "отмена", перемещение "влево","вправо", "вверх", "вниз" и т.д.). Динамик 10 обеспечивает возможность звуковой сигнализации, например, при возникновении нештатной ситуации (отсутствие связи с преобразователями и/или датчиками). Через интерфейс 12 результаты исследования могут быть переданы на удаленный персональный компьютер для дальнейшей обработки, хранения или использования, например при расчете свай и фундаментов. Окончание испытания производится в случае достижения глубины, определенной программой инженерно-геологических изысканий или, при необходимости, в экстренных случаях.-6 015983 Аналогичным образом происходит исследование физико-механических свойств грунта и во всех других заданных точках. Источники информации 1. ГОСТ 19912-2001. Грунты. Методы полевых испытаний статическим и динамическим зондированием. 2. Динамическое зондирование. Наставление по испытаниям грунтов в массивах. Всесоюзный научно-исследовательский институт транспортного строительства. ГОСТы, НИПы, СанПиНы и др. Образовательный ресурс. [Электронный ресурс]. - 22 февраля 2010 г. - Режим доступа:http://basel.gostedu.ru/5/5588/i871002. 3. Комплект инструмента динамического зондирования КДЗ-001. Инженерно-геологические изыскания. Буровой портал Drilling.ru. [Электронный ресурс]. - 22 февраля 2010 г. - Режим доступа:http://www.drillings.ru/kdz001. 4. Заявка JP10058036, опубл. 21.09.1999,JP 11256559 А. 5. Заявка RU2008125936 А, опубл. 27.12.2009. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Станция динамического зондирования грунта, содержащая связанные между собой линиями питания и информационными линиями, снабженными соответствующими интерфейсами, зонд со штангами и электронную измерительную систему с датчиками, а также ударное устройство с подвижным грузомбойком и средства извлечения зонда из грунта, отличающаяся тем, что ударное устройство представляет собой установленный на направляющей опоре молот, снабженный рычагом управления подъемом и содержащий гидромотор, выполненный с возможностью привода механизма цепной передачи, размещенного в кожухе и выполненного с возможностью размыкаемой кинематической связи с бойком, установленным с возможностью совершения возвратно-поступательного перемещения в предусмотренном в кожухе вертикальном направляющем канале, с нижней стороны которого установлен подпятник, выполненный с возможностью передачи вертикального ударного воздействия бойка на установленную в нем штангу зонда, измерительная система содержит измерительный преобразователь глубины погружения зонда; информационно связанный по меньшей мере с одним датчиком глубины погружения, и преобразователь ударов бойка молота в электрические импульсы, информационно связанный с измерительным преобразователем глубины погружения зонда, механически жестко связанный с направляющей опорой и кинематически связанный с рычагом управления подъемом молота, причем преобразователь глубины погружения зонда и преобразователь ударов бойка молота в электрические импульсы через распределительный блок связаны с программируемым регистратором динамического зондирования. 2. Станция по п.1, отличающаяся тем, что регистратор динамического зондирования содержит, по меньшей мере, связанные с микроконтроллером дисплей, выполненный с возможностью отображения информации в графическом виде в реальном масштабе времени и в режиме считывания записей, сохраненных по меньшей мере на одной карте памяти, по меньшей мере один информационный вход, по меньшей мере один информационный выход, выполненный с возможностью связи с внешним средством обработки данных, органы управления и источник автономного питания. 3. Станция по любому из пп.1 или 2, отличающаяся тем, что измерительный преобразователь глубины погружения зонда содержит измерительную трубку, механически жестко связанную с направляющей опорой, с размещенным на трубке с возможностью перемещения вдоль оси трубки ползунком с магнитом и размещенным в трубке множеством датчиков положения, выполненных предпочтительно в виде датчиков Холла, связанных с микроконтроллером с платы управления преобразователя. 4. Станция по любому из пп.1-3, отличающаяся тем, что преобразователь ударов бойка молота в электрические импульсы содержит связанный с микроконтроллером измерительного преобразователя глубины погружения зонда датчик индуктивности, установленный на кожухе молота с возможностью формирования электрического импульса при прохождении в зоне установки датчика средства размыкания кинематической связи с бойком, выполненного в виде размещенного на цепи металлического зуба. 5. Молот станции динамического зондирования по любому из пп.1-4, снабженный рычагом управления подъемом и содержащий гидромотор, выполненный с возможностью привода механизма цепной передачи, размещенного в кожухе и выполненного с возможностью размыкаемой кинематической связи с бойком, установленным с возможностью совершения возвратно-поступательного перемещения в предусмотренном в кожухе вертикальном направляющем канале, с нижней стороны которого установлен подпятник, выполненный с возможностью передачи ударного воздействия бойка на зонд. 6. Молот по п.5, отличающийся тем, что механизм цепной передачи содержит расположенные на одной вертикали ведомую звездочку и связанную с выходным валом гидромотора ведущую звездочку, а также установленную на звездочках с формированием направленной вверх и направленной вниз ветвей цепь, по меньшей мере одно из звеньев которой снабжено жестко связанным со звеном цепи элементом зацепления с бойком, при этом боек снабжен ответным элементом зацепления, причем длина ветвей цепи и шаг установки элементов зацепления на цепи выбраны с возможностью формирования кинематической-7 015983 связи между элементом зацепления цепи и ответным элементом зацепления бойка с перемещением бойка снизу вверх на заданную высоту и последующим размыканием кинематической связи с обеспечением перемещения бойка сверху вниз под действием силы тяжести. 7. Молот по любому из пп.5 или 6, отличающийся тем, что элемент зацепления цепи выполнен в виде зуба, а ответный элемент зацепления бойка выполнен в виде выступа, предпочтительно расположенного по всему периметру поперечного сечения бойка.
МПК / Метки
МПК: E02D 1/02
Метки: динамического, зондирования, молот, станции, станция, грунтов
Код ссылки
<a href="https://eas.patents.su/10-15983-stanciya-dinamicheskogo-zondirovaniya-gruntov-i-molot-dlya-stancii-dinamicheskogo-zondirovaniya-gruntov.html" rel="bookmark" title="База патентов Евразийского Союза">Станция динамического зондирования грунтов и молот для станции динамического зондирования грунтов</a>
Станция статического зондирования грунтов и датчик глубины погружения для станции статического зондирования грунтов
Номер патента: 15008
Опубликовано: 29.04.2011
Авторы: Махнач Алексей Владимирович, Гутник Виктор Леонидович, Дорофейчик Сергей Витальевич, Миклашевский Сергей Николаевич, Камышлеев Александр Александрович
МПК: E02D 1/02, G01N 33/24
Метки: глубины, станция, грунтов, погружения, датчик, статического, станции, зондирования
Формула / Реферат:
1. Станция статического зондирования грунтов, содержащая связанные между собой линиями питания и информационными линиями, снабженными соответствующими интерфейсами, средство измерения удельного сопротивления грунта, выполненное в виде по меньшей мере одного снабженного информационным выходом и содержащего упругий элемент конуса и упругий элемент муфты трения с соответствующими тензометрическими мостами тензометрического зонда по меньшей мере с...
Способ обработки грунтов, в частности сухих водочувствительных грунтов
Номер патента: 10561
Опубликовано: 30.10.2008
Автор: Жоли Клод
МПК: E01C 21/00, E02D 3/12
Метки: грунтов, способ, частности, обработки, водочувствительных, сухих
Формула / Реферат:
1. Способ обработки грунтов, в частности сухих водочувствительных грунтов, заключающийся в том, что в грунте одновременно роют несколько параллельных траншей определенной глубины и распределяют в указанных траншеях жидкость для обработки, в случае необходимости содержащую наполнитель в виде суспензии, отличающийся тем, что траншеи формируют так, что каждая из них содержит вертикальную борозду первой ширины (L1) и горизонтальную борозду второй...
Способ радиолокационного зондирования земных недр и устройство для его реализации – комплекс георадиолокационной разведки
Номер патента: 9971
Опубликовано: 28.04.2008
Автор: Шеппель Дэвид
МПК: G01V 3/12
Метки: недр, реализации, способ, разведки, радиолокационного, устройство, зондирования, земных, георадиолокационной, комплекс
Формула / Реферат:
1. Способ радиолокационного зондирования земных недр, заключающийся в том, что формируют с помощью радиопередающего устройства зондирующий сигнал, обеспечивающий при его излучении формирование электромагнитного поля с эллиптической поляризацией и перестраиваемой по выбранному закону в течение длительности сигнала частотой вращения вектора поляризации, излучают сформированный зондирующий сигнал в направлении земной поверхности, осуществляют с...
Способ зондирования многостанционной сети
Номер патента: 9101
Опубликовано: 26.10.2007
Авторы: Родман Пол Джонатан, Ларсен Джеймс Дейвид
МПК: H04L 12/56
Метки: способ, сети, многостанционной, зондирования
Формула / Реферат:
1. Способ управления сетью связи, содержащей множество станций, каждая из которых способна передавать и принимать данные таким образом, чтобы сеть могла передавать данные от станции-отправителя станции-адресату по меньшей мере через одну промежуточную станцию, выбираемую по обстоятельствам, заключающийся в следующем: а) на каждой станции согласно первым заданным условиям выбирают канал зондирования для передачи сигналов зондирования другим...
Система и способ динамического уплотнения вокруг бурильной штанги
Номер патента: 10818
Опубликовано: 30.12.2008
Авторы: Аскеланд Том Кьетиль, Эдвардсен Пер Эспен
МПК: E21B 33/035, E21B 7/128
Метки: уплотнения, система, вокруг, бурильной, динамического, штанги, способ
Формула / Реферат:
1. Система динамического уплотнения вокруг бурильной штанги (16) переменного диаметра в скважинах, содержащих воду, буровой раствор или углеводороды, включающая уплотнительное устройство (10), выполненное для монтажа на существующем в скважине оборудовании и для применения с системами без водоотделяющих колонн, где уплотнительное устройство (10) включает удлиненный узел (30) динамического уплотнения, выполненный для окружения бурильной штанги...
Предыдущий патент: Щебеночный плуг для балластировки щебнем железнодорожного пути
Следующий патент: Способ и система для обработки газа, образующегося в результате испарения
Случайный патент: Соединения тропана