Устройство и способ оптического воспроизведения изображения особенностей на поверхности руки
Формула / Реферат
Устройство для оптического воспроизведения изображения особенностей на поверхности руки, содержащее источник света для освещения области изображения, вращающийся прозрачный цилиндр, имеющий цилиндрическую контактную поверхность для обеспечения контакта с рукой и приспособленный для направления частей руки, находящейся в контакте с контактной поверхностью через область изображения, и детектор, установленный с возможностью перехвата светового пучка из области изображения и выработки из него сигнала, представляющего поверхностные особенности руки, находящейся в контакте с контактной поверхностью в области изображения, причем детектор выполнен с возможностью приема, главным образом, светового пучка, который отражается от контактной поверхности под углом наблюдения относительно нормали к контактной поверхности в области изображения, который больше критического угла для границы раздела между контактной поверхностью и водой.

Текст
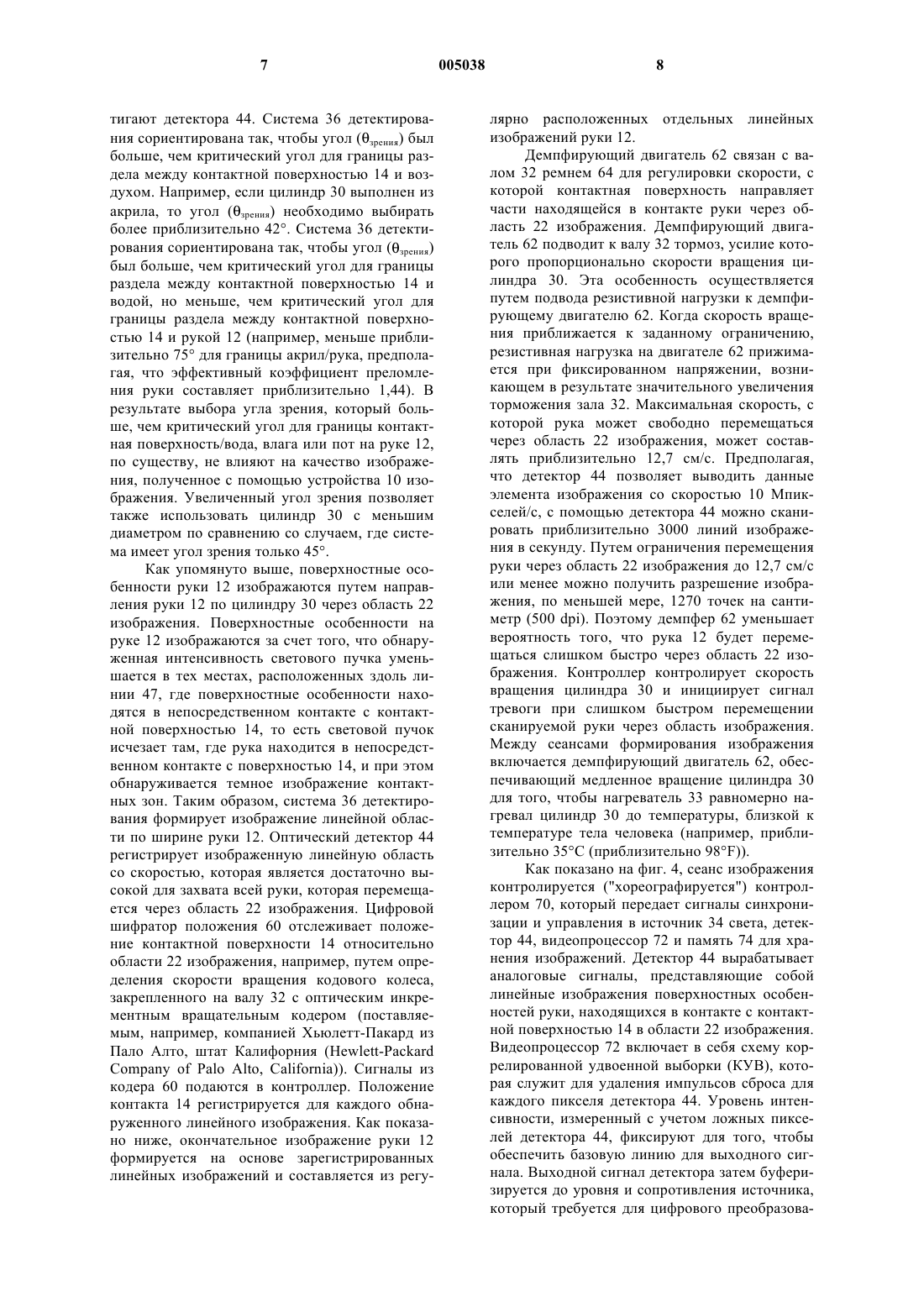
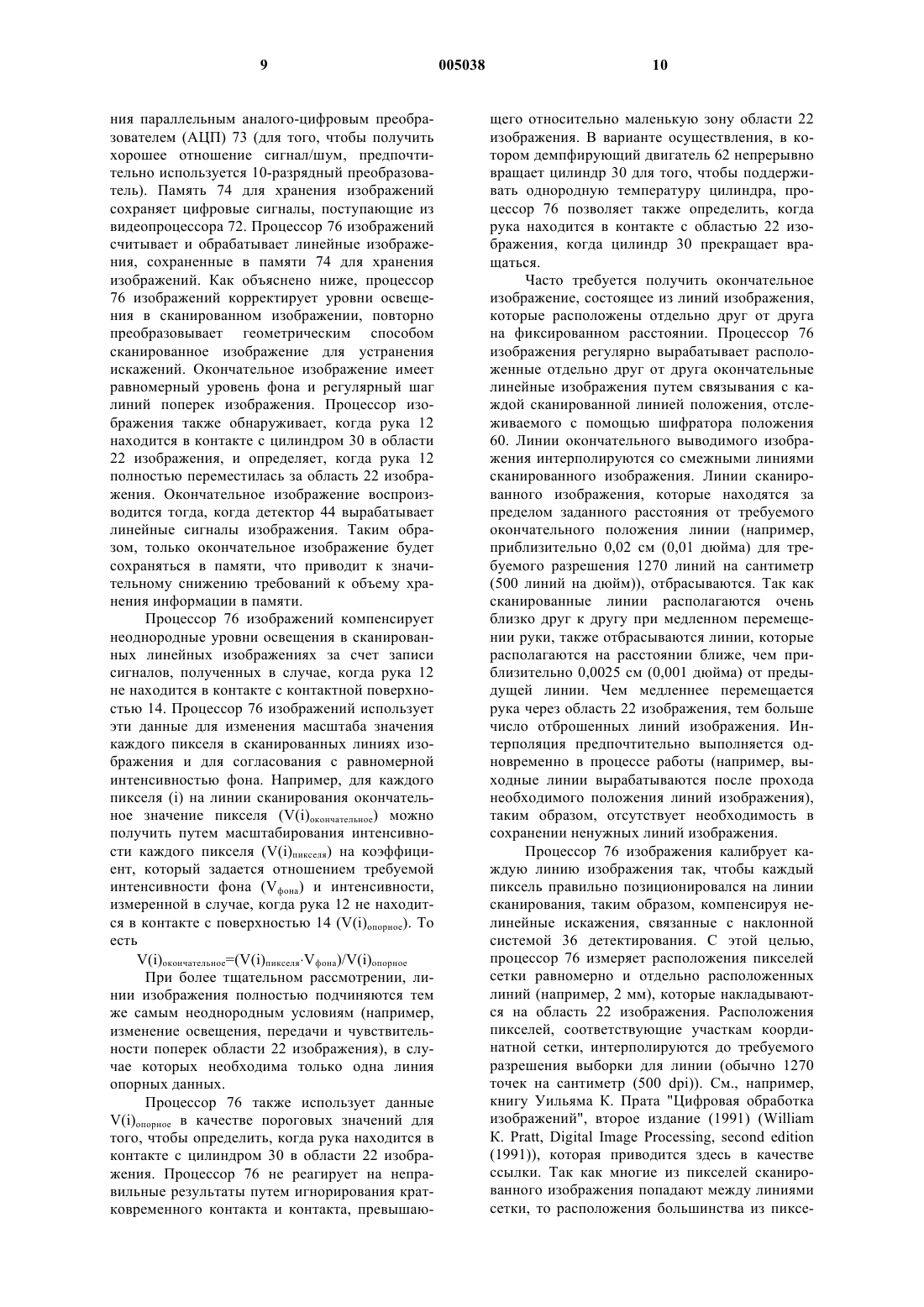
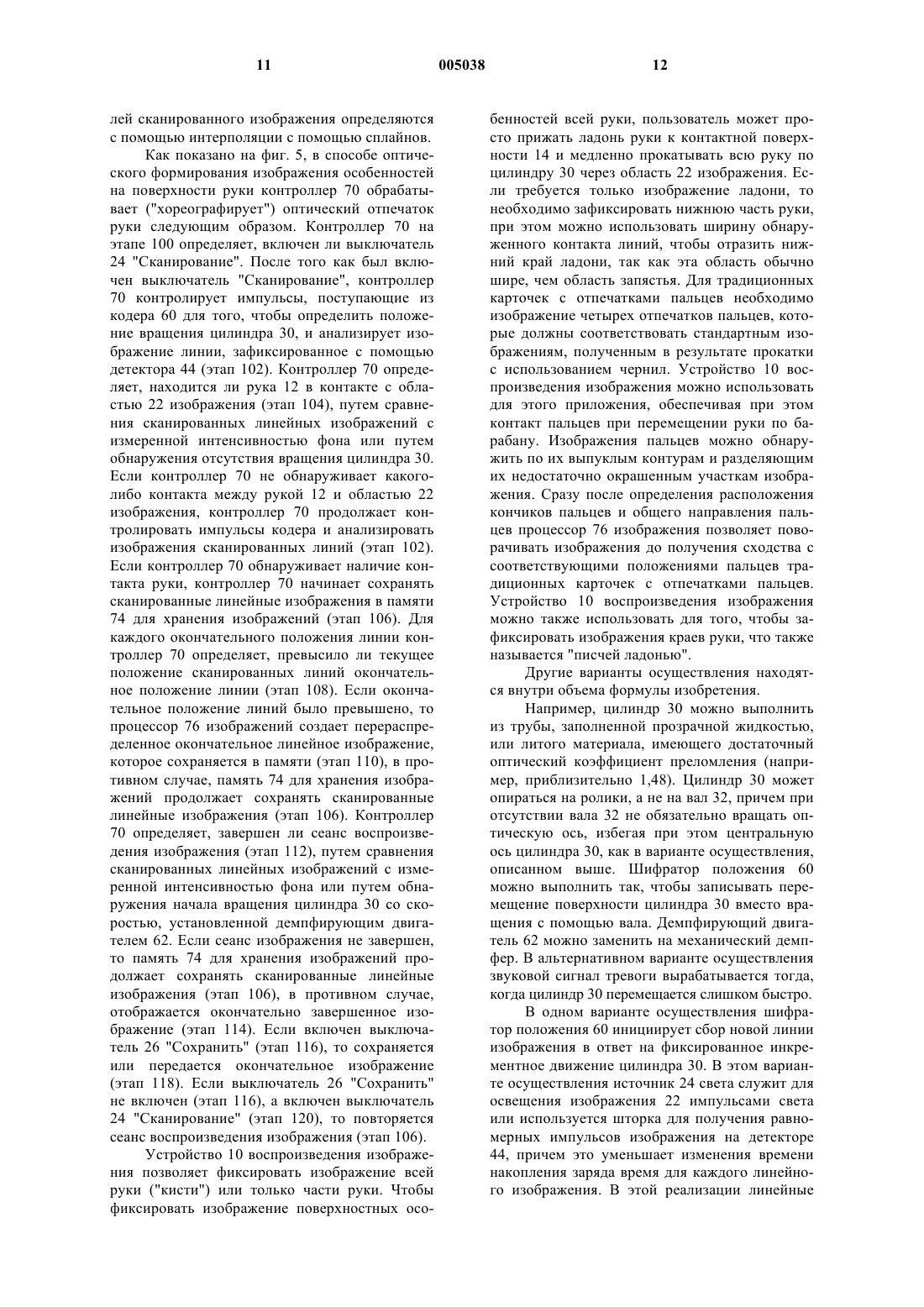
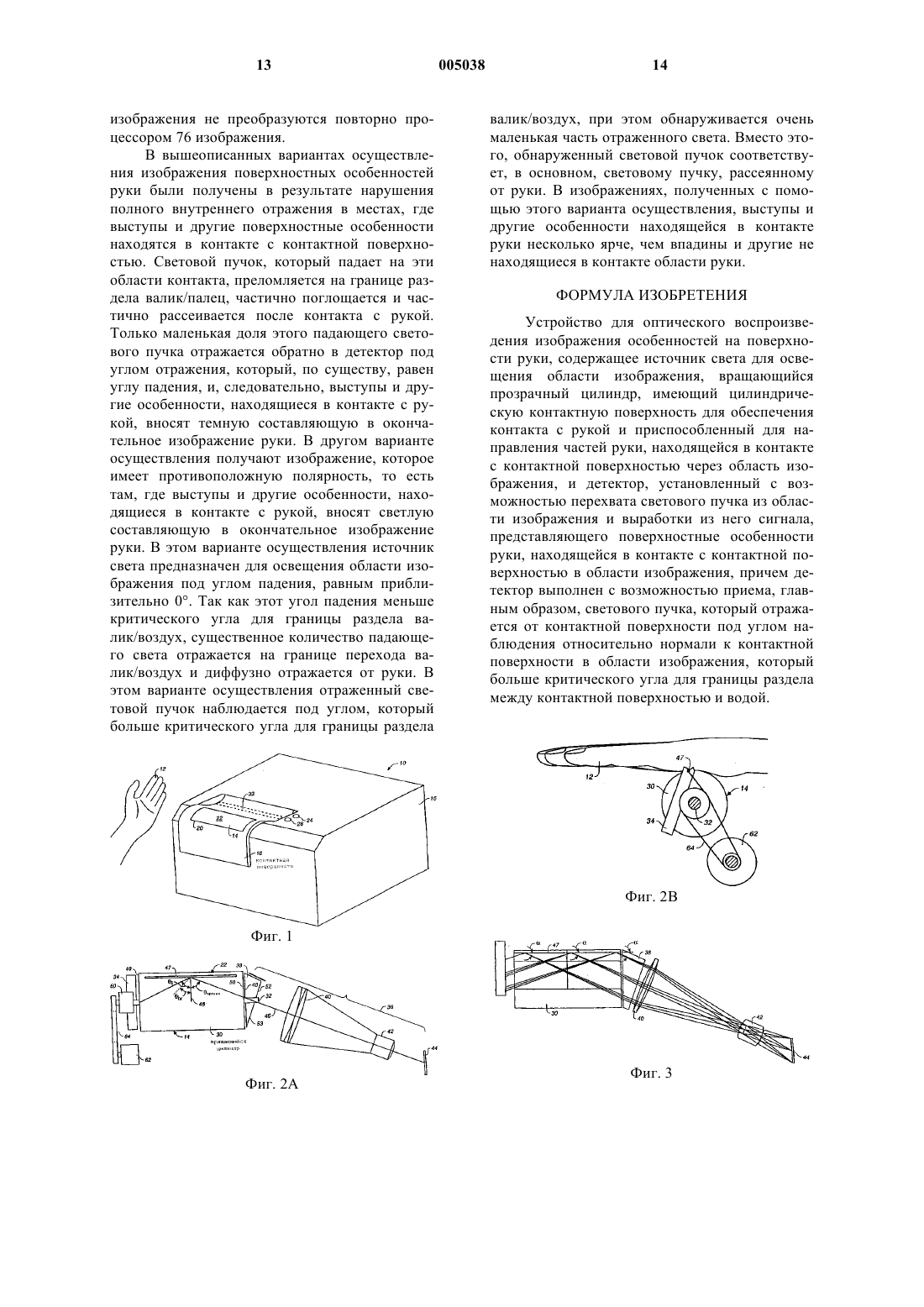
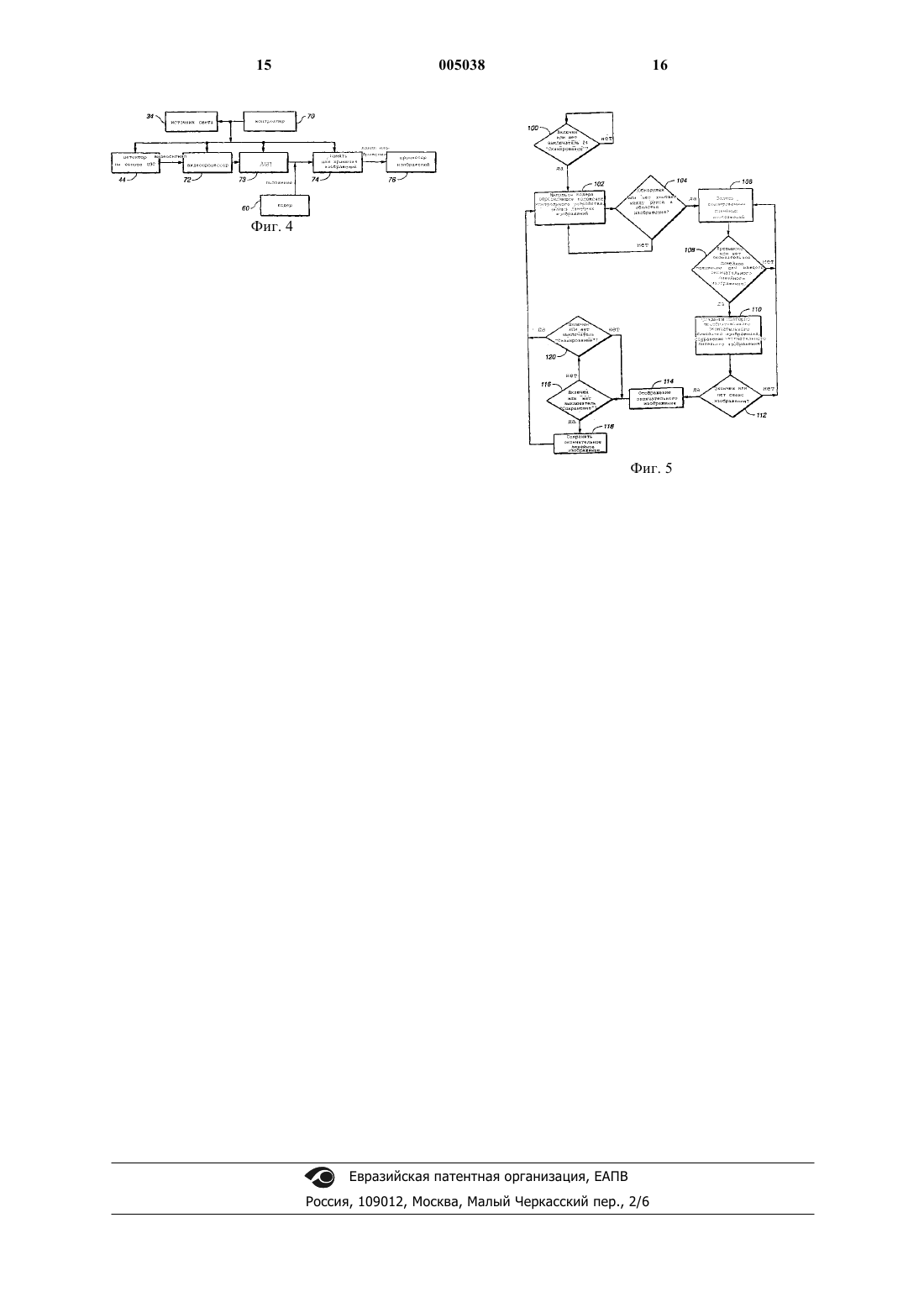
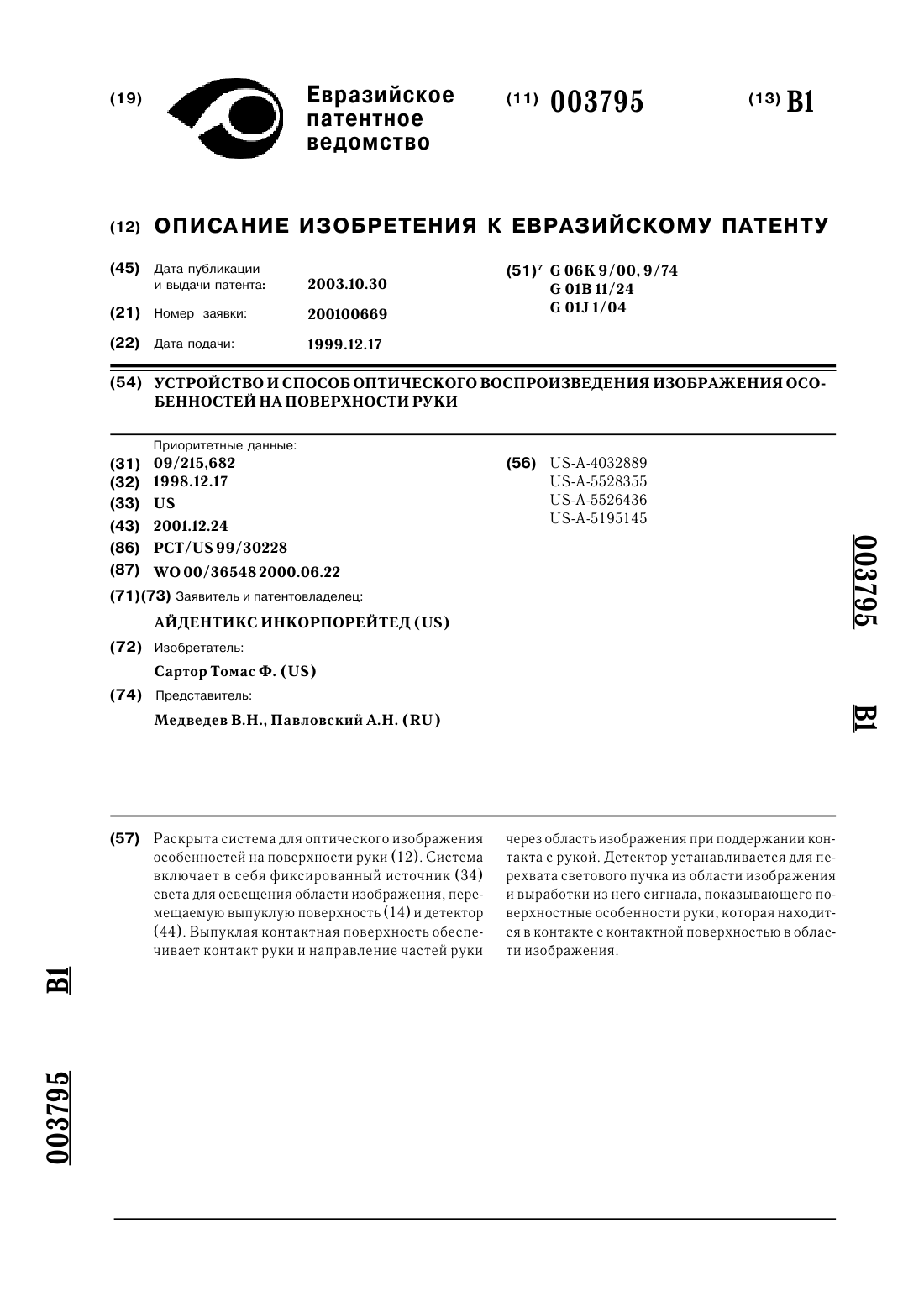
1 К настоящей заявке относятся патент США 5416573 Сартора и патент США 5528355 Мааса, каждый из которых приводится здесь в качестве ссылки. Уровень техники Настоящее изобретение относится к устройству и способам оптического воспроизведения изображения особенностей на поверхности руки ("кисти"), таких как отпечатки пальцев и отпечатки ладоней. Отпечатки пальцев и отпечатки ладоней берут обычно путем нанесения чернил на поверхность кожи и дальнейшего переноса чернил на бумажную среду для регистрации. Для нанесения чернил на кожу и последующего переноса на бумагу требуется специалист, обеспечивающий получение высококачественного изображения. Во избежание проблем, связанных со способами, основанными на использовании чернил,были разработаны оптические системы для сканирования изображений отпечатков пальцев и отпечатков ладоней. В известных оптических системах рука, которую необходимо сканировать, удерживается напротив прозрачного валика и оптический детектор обнаруживает световой пучок, с помощью которого осуществляется сканирование, отражающийся от границы раздела между рукой и валиком для выработки сигналов, представляющих изображения отпечатков ладоней или отпечатков пальцев. Эти сигналы преобразовывают в цифровую форму,запоминают в цифровой компьютерной памяти и обрабатывают для передачи или печати. Сущность изобретения В основу настоящего изобретения положена задача создания устройства, которое позволяет получить качественное изображение поверхностных особенностей руки, которое не зависит от состояния поверхности руки, т.е. от влажности или потности руки. Согласно изобретению предлагается устройство для получения достоверного сигнала,содержащее источник света для освещения области изображения, вращающийся прозрачный цилиндр, имеющий цилиндрическую поверхность для обеспечения контакта с рукой, детектор для перехвата светового пучка из области изображения и выработки из него сигнала,представляющего поверхностные особенности руки, находящейся в контакте с контактной поверхностью в области изображения, причем вращающийся цилиндр выполнен с возможностью направления руки, находящейся в контакте с контактной поверхностью через область формирования изображения, а детектор выполнен с возможностью приема светового пучка, отраженного от контактной поверхности под углом наблюдения относительно нормали к контактной поверхности в области изображения, который больше критического угла для границы раздела между контактной поверхностью и водой. Таким образом можно получить отпечатки 2 пальцев, имеющих светлые выступы и темные впадины. В одном варианте осуществления источник света устанавливается так, что получается нарушение полного внутреннего отражения в области, где выпуклая форма пальца или другая поверхность пальца контактирует с контактной поверхностью или областью изображения. Такое расположение создает отпечаток пальца,который имеет темный выступ и светлую впадину. В другом варианте источник света расположен так, чтобы осветить область изображения под углом падения, равным нулю. Таким образом полученный отпечаток пальцев имеет светлые выпуклые поверхности и темные впадины. Контактная поверхность может иметь постоянный радиус кривизны в области изображения. Контактная поверхность может соответствовать поверхности вращающегося цилиндра. Контактная поверхность может быть выполнена с возможностью сглаживания частей находящейся в контакте руки, перемещающейся через область изображения. Контактная поверхность может находиться в контакте с различными частями руки, когда она направляется через область изображения. Демпфер может быть связан с контактной поверхностью для регулировки скорости, с которой контактная поверхность направляет части руки через область изображения. Можно предусмотреть контрольное устройство (например,шифратор положения) для отслеживания положения контактной поверхности относительно области изображения. Контактную поверхность можно приспособить так, чтобы части руки направлялись через область изображения в направлении сканирования. Область изображения может находиться, по существу, в плоскости изображения, которая пересекает контактную поверхность вдоль линии изображения, которая,по существу, ортогональна направлению сканирования. Детектор можно выполнить с возможностью приема, главным образом, светового пучка, который отражается от контактной поверхности под углом наблюдения относительно нормали к контактной поверхности в области изображения, который больше, чем критический угол для границы раздела между контактной поверхностью и воздухом. Детектор можно выполнить с возможностью приема, главным образом, светового пучка, который отражается от контактной поверхности под углом наблюдения относительно нормали к контактной поверхности в области изображения, который больше,чем критический угол для границы раздела между контактной поверхностью и водой. Угол наблюдения может быть меньше, чем критический угол для границы раздела между контактной поверхностью и изображаемой рукой. Световой пучок, который освещает контактную поверхность в области изображения, 3 может быть, по существу, нормалью к контактной поверхности в области изображения. Источник света и детектор могут быть стационарными. Можно предусмотреть контроллер для определения начала сеанса воспроизведения изображения. Для определения окончания сеанса воспроизведения изображения может быть выполнен контроллер. Части руки можно направить через область изображения путем вращения выпуклой направляющей поверхности через область изображения. Освещенную область изображения можно удлинить в направлении, по существу,ортогональном направлению, в котором направляют части руки. Можно получить двухмерное изображение поверхностных особенностей находящейся в контакте руки, направляемой через область изображения. Писчую ладонь руки можно разместить напротив выпуклой контактной поверхности для того, чтобы получить отпечаток писчей ладони. Изобретение можно использовать для получения полного отпечатка руки, включая ладони и стороны руки. Изобретение можно выполнить с помощью устройства, имеющего компактное посадочное место. Кроме того, так как контактная поверхность направляет руку через область изображения, в отличие от оптического сканирования стационарно расположенной руки, изобретение позволяет взять отпечатки руки любой длины, то есть длина отпечатка не ограничивается посадочным местом устройства воспроизведения изображения. Кроме того, так как контактная поверхность имеет выпуклую форму, изобретение позволяет правильно изображать поверхностные особенности, соответствующие внутренней стороне ладони. Изобретение позволяет также изображать четыре пальца руки, отдельно или в виде части изображения всей руки. Другие особенности и преимущества станут очевидными из следующего описания,включая чертежи и формулу изобретения. Перечень фигур чертежей Сущность изобретения иллюстрируется ссылкой на сопроводительные чертежи, где фиг. 1 схематически изображает общий вид устройства для оптического воспроизведения изображения особенностей на поверхности руки; фиг. 2 А схематически изображает вид спереди некоторых элементов устройства воспроизведения изображения (фиг. 1); фиг. 2 В схематически изображает вид сбоку руки, направляемой через область изображения по контактной поверхности устройства воспроизведения изображения (фиг. 1); фиг. 3 схематически изображает вид сбоку оптических путей, проходящих через оптические элементы устройства воспроизведения изображения (фиг. 1); фиг. 4 изображает блок-схему системы для получения изображения поверхностных особен 005038 4 ностей руки из одного или более сигналов, которые вырабатывает устройство, показанное на фиг. 1; фиг. 5 изображает последовательность операций способа оптического воспроизведения изображения поверхностных особенностей на поверхности руки. Сведения, подтверждающие возможность осуществления изобретения Как показано на фиг. 1, устройство 10 для оптического воспроизведения изображения особенностей на поверхности руки 12 включает в себя контактную поверхность 14, которая поддерживается внутри корпуса 16. Контактная поверхность 14 поддерживается позади съемной крышки 18, которая имеет щель 20, ограничивающую область 22 изображения. Крышка 18 образует, по существу, влагонепроницаемое уплотнение с контактной поверхностью 14 для предотвращения попадания влаги, загрязняющих веществ, переносимых рукой, и протекания чистящей жидкости в корпус 16. Контактная поверхность 14 предусмотрена для поддержки руки 12 и направления ее через область 22 изображения. В процессе работы рука 12 размещается на контактной поверхности 14. Контроллер позволяет автоматически определить, когда рука 12 размещена на контактной поверхности 14 и,таким образом, когда начать сеанс воспроизведения изображения. С другой стороны, выключатель 24 "Сканирование" можно активизировать для инициализации сеанса формирования изображения. Контактная поверхность 14 перемещается относительно области 22 изображения и таким образом направляет части руки 12, находящейся в контакте с контактной поверхностью, через область изображения. После направления руки 12 через область 22 изображения изображение поверхностных особенностей руки 12 может отображаться на видеомониторе. Контроллер позволяет автоматически определить, что сеанс изображения окончен, или активизировать выключатель 26 "Сохранить" для сохранения или передачи данных, соответствующих отображаемому изображению. Данные изображения можно сохранить в энергонезависимой памяти или передать в центральную компьютерную систему. Устройство 10 воспроизведения изображения можно использовать для получения и проверки подлинности отпечатков пальцев человека, отпечатков ладони или отпечатков нижней части ладони. Устройство 10 воспроизведения изображения можно также использовать для управления доступом человека к оборудованию или компьютерам. Как показано на фиг. 2 А и 2 В, контактная поверхность 14 соответствует поверхности вращающегося цилиндра 30, закрепленного на центральном валу 32, который опирается на подшипники. Цилиндр 30 является прозрачным для светового пучка, полученного с помощью ис 5 точника света 34. В одном варианте осуществления, цилиндр 30 выполнен из чистого органического вещества с поверхностью, отполированной до оптической чистоты. Как показано ниже, качество изображения улучшается в случае, когда изображаемые части руки находятся в полном и непосредственном контакте с контактной поверхностью. Поэтому размер контактной поверхности 14 устанавливается таким,чтобы большая часть размеров руки соответствовала выпуклой форме контактной поверхности. В предпочтительном варианте осуществления диаметр цилиндра 30 составляет приблизительно 7,6 см и длина приблизительно 15,2 см. За цилиндром 30 расположен ленточный нагреватель 33 (показанный на фиг. 1 штриховыми линиями) для уменьшения конденсации на контактной поверхности 14 и повышения качества контакта между рукой 12 и контактной поверхностью 14. Тонкое покрытие из прозрачного полимера(например, силикон, полиуретан и эпоксидная смола) можно использовать для повышения качества контакта руки с контактной поверхностью 14. На контактную поверхность 14 можно нанести полимер, имеющий твердость по Шору А приблизительно 60-80. Полимер можно нанести на контактную поверхность 14 с использованием способов капания или распыления. С другой стороны, листовой полимер можно приклеить к контактной поверхности 14. В общем,полимер должен, по существу, быть коррозиеустойчивым к жирам на пальцах человека и моющим средствам. Источник 34 света размещается рядом с центральным валом 32. Область 22 изображения освещается светом, падающим из источника 34 света. Источник 34 света предпочтительно включает в себя оптическую линейку на основе красных светоизлучающих диодов (СИД), перед которой устанавливается тонкая диффузнорассеивающая пластинка. Световой пучок, падающий из области 22 изображения, обнаруживается при помощи системы 36 детектирования,которая включает в себя призму 38, телескопические линзы 40, 42 для воспроизведения изображения и оптический детектор 44 (например,ПЗС-матрица). Система 36 детектирования размещается вдоль оптической оси 46. Система 36 детектирования предназначена для приема светового пучка, который проходит вдоль линии 47 изображения в области 22 изображения. Призму 38 устанавливают под углом 25 относительно центральной оси, которая определяется осью вала 32, для того, чтобы обеспечить место, необходимое для вала 32 и связанного с ним крепления. Призма 38 имеет первую поверхность 48, которая параллельна круглой торцевой поверхности 50 цилиндра 30, и дополнительно имеет вторую поверхность 52, которая перпендикулярна оптической оси 46. Угол пересечения 53 поверхности 50 и поверхности 52 6 составляет предпочтительно 23,3. Поверхность 48 призмы размещают рядом с поверхностью 50 цилиндра для того, чтобы уменьшить отклонение оптической оси. Поверхность 48 призмы можно разместить на расстоянии приблизительно 2 мм или менее от поверхности 50 цилиндра. Призма 38 выполнена предпочтительно из того же самого материала, как и цилиндр 30 (например, акрила). Линзы 40, 42 для воспроизведения изображения имеют телескопическую конфигурацию для того, чтобы главный световой луч, падающий по линии 47 изображения, пересекал контактную поверхность 14 под тем же самым углом(фиг. 3). Линза 40 является достаточно большой для того, чтобы обеспечить воспроизведение изображения всей области 22 изображения. Общее увеличение линз 40, 42 выбирают таким, чтобы сфокусировать всю область 22 изображения на поверхность обнаружения детектора 44. В соответствии с условием Щимпфлага (Schiempflug), поверхность обнаружения оптического детектора 44 имеет наклон к оптической оси 46 для того, чтобы выдержать для всей линии 47 изображения правильное фокусное расстояние на поверхности обнаружения. Оптический детектор 44 включает в себя ПЗС-линейку из 5000 минимальных элементов изображения (пикселей), которые располагаются отдельно друг от друга на расстоянии приблизительно 7 мкм. В большинстве приложений при ручном сканировании область изображения,представляющая интерес, будет иметь ширину приблизительно 12,7 см. Таким образом, разрешение изображения около 1524 точек на сантиметр (600 dpi (точек на дюйм можно достигнуть с помощью выборки только 3000 из 5000 пикселей детектора 44. ПЗС-линейка предпочтительно имеет частоту выборки вплоть до 10 Мпикселей в секунду. Световой пучок, падающий на контактную поверхность под углом (1) (измеряется относительно нормали 48 к контактной поверхности),который больше, чем критический угол (кр),будет испытывать внутреннее отражение по направлению к системе 36 детектирования. Критический угол определяется как наименьший угол падения, при котором световой пучок,падающий на контактную поверхность, испытывает полное внутреннее отражение внутри цилиндра 30. Значение критического угла на границе раздела между двумя средами находится по закону Снеллиуса, как показано в патенте США 5416573, который приводится здесь в качестве ссылки. Апертура системы 36 обнаружения определяет, какие из световых лучей,испытывающих внутреннее отражение, достигают детектора 44. В частности, угол (зрения) между оптической осью 46 и нормалью 48(упоминаемый здесь как "угол зрения") определяет, какие из отраженных световых лучей дос 7 тигают детектора 44. Система 36 детектирования сориентирована так, чтобы угол (зрения) был больше, чем критический угол для границы раздела между контактной поверхностью 14 и воздухом. Например, если цилиндр 30 выполнен из акрила, то угол (зрения) необходимо выбирать более приблизительно 42. Система 36 детектирования сориентирована так, чтобы угол (зрения) был больше, чем критический угол для границы раздела между контактной поверхностью 14 и водой, но меньше, чем критический угол для границы раздела между контактной поверхностью 14 и рукой 12 (например, меньше приблизительно 75 для границы акрил/рука, предполагая, что эффективный коэффициент преломления руки составляет приблизительно 1,44). В результате выбора угла зрения, который больше, чем критический угол для границы контактная поверхность/вода, влага или пот на руке 12,по существу, не влияют на качество изображения, полученное с помощью устройства 10 изображения. Увеличенный угол зрения позволяет также использовать цилиндр 30 с меньшим диаметром по сравнению со случаем, где система имеет угол зрения только 45. Как упомянуто выше, поверхностные особенности руки 12 изображаются путем направления руки 12 по цилиндру 30 через область 22 изображения. Поверхностные особенности на руке 12 изображаются за счет того, что обнаруженная интенсивность светового пучка уменьшается в тех местах, расположенных здоль линии 47, где поверхностные особенности находятся в непосредственном контакте с контактной поверхностью 14, то есть световой пучок исчезает там, где рука находится в непосредственном контакте с поверхностью 14, и при этом обнаруживается темное изображение контактных зон. Таким образом, система 36 детектирования формирует изображение линейной области по ширине руки 12. Оптический детектор 44 регистрирует изображенную линейную область со скоростью, которая является достаточно высокой для захвата всей руки, которая перемещается через область 22 изображения. Цифровой шифратор положения 60 отслеживает положение контактной поверхности 14 относительно области 22 изображения, например, путем определения скорости вращения кодового колеса,закрепленного на валу 32 с оптическим инкрементным вращательным кодером (поставляемым, например, компанией Хьюлетт-Пакард из Пало Алто, штат Калифорния (Hewlett-PackardCompany of Palo Alto, Califоrnia. Сигналы из кодера 60 подаются в контроллер. Положение контакта 14 регистрируется для каждого обнаруженного линейного изображения. Как показано ниже, окончательное изображение руки 12 формируется на основе зарегистрированных линейных изображений и составляется из регу 005038 8 лярно расположенных отдельных линейных изображений руки 12. Демпфирующий двигатель 62 связан с валом 32 ремнем 64 для регулировки скорости, с которой контактная поверхность направляет части находящейся в контакте руки через область 22 изображения. Демпфирующий двигатель 62 подводит к валу 32 тормоз, усилие которого пропорционально скорости вращения цилиндра 30. Эта особенность осуществляется путем подвода резистивной нагрузки к демпфирующему двигателю 62. Когда скорость вращения приближается к заданному ограничению,резистивная нагрузка на двигателе 62 прижимается при фиксированном напряжении, возникающем в результате значительного увеличения торможения зала 32. Максимальная скорость, с которой рука может свободно перемещаться через область 22 изображения, может составлять приблизительно 12,7 см/с. Предполагая,что детектор 44 позволяет выводить данные элемента изображения со скоростью 10 Мпикселей/с, с помощью детектора 44 можно сканировать приблизительно 3000 линий изображения в секунду. Путем ограничения перемещения руки через область 22 изображения до 12,7 см/с или менее можно получить разрешение изображения, по меньшей мере, 1270 точек на сантиметр (500 dpi). Поэтому демпфер 62 уменьшает вероятность того, что рука 12 будет перемещаться слишком быстро через область 22 изображения. Контроллер контролирует скорость вращения цилиндра 30 и инициирует сигнал тревоги при слишком быстром перемещении сканируемой руки через область изображения. Между сеансами формирования изображения включается демпфирующий двигатель 62, обеспечивающий медленное вращение цилиндра 30 для того, чтобы нагреватель 33 равномерно нагревал цилиндр 30 до температуры, близкой к температуре тела человека (например, приблизительно 35 С (приблизительно 98F. Как показано на фиг. 4, сеанс изображения контролируется ("хореографируется") контроллером 70, который передает сигналы синхронизации и управления в источник 34 света, детектор 44, видеопроцессор 72 и память 74 для хранения изображений. Детектор 44 вырабатывает аналоговые сигналы, представляющие собой линейные изображения поверхностных особенностей руки, находящихся в контакте с контактной поверхностью 14 в области 22 изображения. Видеопроцессор 72 включает в себя схему коррелированной удвоенной выборки (КУВ), которая служит для удаления импульсов сброса для каждого пикселя детектора 44. Уровень интенсивности, измеренный с учетом ложных пикселей детектора 44, фиксируют для того, чтобы обеспечить базовую линию для выходного сигнала. Выходной сигнал детектора затем буферизируется до уровня и сопротивления источника,который требуется для цифрового преобразова 9 ния параллельным аналого-цифровым преобразователем (АЦП) 73 (для того, чтобы получить хорошее отношение сигнал/шум, предпочтительно используется 10-разрядный преобразователь). Память 74 для хранения изображений сохраняет цифровые сигналы, поступающие из видеопроцессора 72. Процессор 76 изображений считывает и обрабатывает линейные изображения, сохраненные в памяти 74 для хранения изображений. Как объяснено ниже, процессор 76 изображений корректирует уровни освещения в сканированном изображении, повторно преобразовывает геометрическим способом сканированное изображение для устранения искажений. Окончательное изображение имеет равномерный уровень фона и регулярный шаг линий поперек изображения. Процессор изображения также обнаруживает, когда рука 12 находится в контакте с цилиндром 30 в области 22 изображения, и определяет, когда рука 12 полностью переместилась за область 22 изображения. Окончательное изображение воспроизводится тогда, когда детектор 44 вырабатывает линейные сигналы изображения. Таким образом, только окончательное изображение будет сохраняться в памяти, что приводит к значительному снижению требований к объему хранения информации в памяти. Процессор 76 изображений компенсирует неоднородные уровни освещения в сканированных линейных изображениях за счет записи сигналов, полученных в случае, когда рука 12 не находится в контакте с контактной поверхностью 14. Процессор 76 изображений использует эти данные для изменения масштаба значения каждого пикселя в сканированных линиях изображения и для согласования с равномерной интенсивностьюфона. Например, для каждого пикселя (i) на линии сканирования окончательное значение пикселя (V(i)окончательное) можно получить путем масштабирования интенсивности каждого пикселя (V(i)пикселя) на коэффициент, который задается отношением требуемой интенсивности фона (Vфона) и интенсивности,измеренной в случае, когда рука 12 не находится в контакте с поверхностью 14 (V(i)опорное). То естьV(i)окончательное=(V(i)пикселяVфона)/V(i)опорное При более тщательном рассмотрении, линии изображения полностью подчиняются тем же самым неоднородным условиям (например,изменение освещения, передачи и чувствительности поперек области 22 изображения), в случае которых необходима только одна линия опорных данных. Процессор 76 также использует данныеV(i)опорное в качестве пороговых значений для того, чтобы определить, когда рука находится в контакте с цилиндром 30 в области 22 изображения. Процессор 76 не реагирует на неправильные результаты путем игнорирования кратковременного контакта и контакта, превышаю 005038 10 щего относительно маленькую зону области 22 изображения. В варианте осуществления, в котором демпфирующий двигатель 62 непрерывно вращает цилиндр 30 для того, чтобы поддерживать однородную температуру цилиндра, процессор 76 позволяет также определить, когда рука находится в контакте с областью 22 изображения, когда цилиндр 30 прекращает вращаться. Часто требуется получить окончательное изображение, состоящее из линий изображения,которые расположены отдельно друг от друга на фиксированном расстоянии. Процессор 76 изображения регулярно вырабатывает расположенные отдельно друг от друга окончательные линейные изображения путем связывания с каждой сканированной линией положения, отслеживаемого с помощью шифратора положения 60. Линии окончательного выводимого изображения интерполируются со смежными линиями сканированного изображения. Линии сканированного изображения, которые находятся за пределом заданного расстояния от требуемого окончательного положения линии (например,приблизительно 0,02 см (0,01 дюйма) для требуемого разрешения 1270 линий на сантиметр(500 линий на дюйм, отбрасываются. Так как сканированные линии располагаются очень близко друг к другу при медленном перемещении руки, также отбрасываются линии, которые располагаются на расстоянии ближе, чем приблизительно 0,0025 см (0,001 дюйма) от предыдущей линии. Чем медленнее перемещается рука через область 22 изображения, тем больше число отброшенных линий изображения. Интерполяция предпочтительно выполняется одновременно в процессе работы (например, выходные линии вырабатываются после прохода необходимого положения линий изображения),таким образом, отсутствует необходимость в сохранении ненужных линий изображения. Процессор 76 изображения калибрует каждую линию изображения так, чтобы каждый пиксель правильно позиционировался на линии сканирования, таким образом, компенсируя нелинейные искажения, связанные с наклонной системой 36 детектирования. С этой целью,процессор 76 измеряет расположения пикселей сетки равномерно и отдельно расположенных линий (например, 2 мм), которые накладываются на область 22 изображения. Расположения пикселей, соответствующие участкам координатной сетки, интерполируются до требуемого разрешения выборки для линии (обычно 1270 точек на сантиметр (500 dpi. См., например,книгу Уильяма К. Прата "Цифровая обработка изображений", второе издание (1991) (William К. Pratt, Digital Image Processing, second edition(1991, которая приводится здесь в качестве ссылки. Так как многие из пикселей сканированного изображения попадают между линиями сетки, то расположения большинства из пиксе 11 лей сканированного изображения определяются с помощью интерполяции с помощью сплайнов. Как показано на фиг. 5, в способе оптического формирования изображения особенностей на поверхности руки контроллер 70 обрабатывает ("хореографирует") оптический отпечаток руки следующим образом. Контроллер 70 на этапе 100 определяет, включен ли выключатель 24 "Сканирование". После того как был включен выключатель "Сканирование", контроллер 70 контролирует импульсы, поступающие из кодера 60 для того, чтобы определить положение вращения цилиндра 30, и анализирует изображение линии, зафиксированное с помощью детектора 44 (этап 102). Контроллер 70 определяет, находится ли рука 12 в контакте с областью 22 изображения (этап 104), путем сравнения сканированных линейных изображений с измеренной интенсивностью фона или путем обнаружения отсутствия вращения цилиндра 30. Если контроллер 70 не обнаруживает какоголибо контакта между рукой 12 и областью 22 изображения, контроллер 70 продолжает контролировать импульсы кодера и анализировать изображения сканированных линий (этап 102). Если контроллер 70 обнаруживает наличие контакта руки, контроллер 70 начинает сохранять сканированные линейные изображения в памяти 74 для хранения изображений (этап 106). Для каждого окончательного положения линии контроллер 70 определяет, превысило ли текущее положение сканированных линий окончательное положение линии (этап 108). Если окончательное положение линий было превышено, то процессор 76 изображений создает перераспределенное окончательное линейное изображение,которое сохраняется в памяти (этап 110), в противном случае, память 74 для хранения изображений продолжает сохранять сканированные линейные изображения (этап 106). Контроллер 70 определяет, завершен ли сеанс воспроизведения изображения (этап 112), путем сравнения сканированных линейных изображений с измеренной интенсивностью фона или путем обнаружения начала вращения цилиндра 30 со скоростью, установленной демпфирующим двигателем 62. Если сеанс изображения не завершен,то память 74 для хранения изображений продолжает сохранять сканированные линейные изображения (этап 106), в противном случае,отображается окончательно завершенное изображение (этап 114). Если включен выключатель 26 "Сохранить" (этап 116), то сохраняется или передается окончательное изображение(этап 118). Если выключатель 26 "Сохранить" не включен (этап 116), а включен выключатель 24 "Сканирование" (этап 120), то повторяется сеанс воспроизведения изображения (этап 106). Устройство 10 воспроизведения изображения позволяет фиксировать изображение всей руки ("кисти") или только части руки. Чтобы фиксировать изображение поверхностных осо 005038 12 бенностей всей руки, пользователь может просто прижать ладонь руки к контактной поверхности 14 и медленно прокатывать всю руку по цилиндру 30 через область 22 изображения. Если требуется только изображение ладони, то необходимо зафиксировать нижнюю часть руки,при этом можно использовать ширину обнаруженного контакта линий, чтобы отразить нижний край ладони, так как эта область обычно шире, чем область запястья. Для традиционных карточек с отпечатками пальцев необходимо изображение четырех отпечатков пальцев, которые должны соответствовать стандартным изображениям, полученным в результате прокатки с использованием чернил. Устройство 10 воспроизведения изображения можно использовать для этого приложения, обеспечивая при этом контакт пальцев при перемещении руки по барабану. Изображения пальцев можно обнаружить по их выпуклым контурам и разделяющим их недостаточно окрашенным участкам изображения. Сразу после определения расположения кончиков пальцев и общего направления пальцев процессор 76 изображения позволяет поворачивать изображения до получения сходства с соответствующими положениями пальцев традиционных карточек с отпечатками пальцев. Устройство 10 воспроизведения изображения можно также использовать для того, чтобы зафиксировать изображения краев руки, что также называется "писчей ладонью". Другие варианты осуществления находятся внутри объема формулы изобретения. Например, цилиндр 30 можно выполнить из трубы, заполненной прозрачной жидкостью,или литого материала, имеющего достаточный оптический коэффициент преломления (например, приблизительно 1,48). Цилиндр 30 может опираться на ролики, а не на вал 32, причем при отсутствии вала 32 не обязательно вращать оптическую ось, избегая при этом центральную ось цилиндра 30, как в варианте осуществления,описанном выше. Шифратор положения 60 можно выполнить так, чтобы записывать перемещение поверхности цилиндра 30 вместо вращения с помощью вала. Демпфирующий двигатель 62 можно заменить на механический демпфер. В альтернативном варианте осуществления звуковой сигнал тревоги вырабатывается тогда,когда цилиндр 30 перемещается слишком быстро. В одном варианте осуществления шифратор положения 60 инициирует сбор новой линии изображения в ответ на фиксированное инкрементное движение цилиндра 30. В этом варианте осуществления источник 24 света служит для освещения изображения 22 импульсами света или используется шторка для получения равномерных импульсов изображения на детекторе 44, причем это уменьшает изменения времени накопления заряда время для каждого линейного изображения. В этой реализации линейные 13 изображения не преобразуются повторно процессором 76 изображения. В вышеописанных вариантах осуществления изображения поверхностных особенностей руки были получены в результате нарушения полного внутреннего отражения в местах, где выступы и другие поверхностные особенности находятся в контакте с контактной поверхностью. Световой пучок, который падает на эти области контакта, преломляется на границе раздела валик/палец, частично поглощается и частично рассеивается после контакта с рукой. Только маленькая доля этого падающего светового пучка отражается обратно в детектор под углом отражения, который, по существу, равен углу падения, и, следовательно, выступы и другие особенности, находящиеся в контакте с рукой, вносят темную составляющую в окончательное изображение руки. В другом варианте осуществления получают изображение, которое имеет противоположную полярность, то есть там, где выступы и другие особенности, находящиеся в контакте с рукой, вносят светлую составляющую в окончательное изображение руки. В этом варианте осуществления источник света предназначен для освещения области изображения под углом падения, равным приблизительно 0. Так как этот угол падения меньше критического угла для границы раздела валик/воздух, существенное количество падающего света отражается на границе перехода валик/воздух и диффузно отражается от руки. В этом варианте осуществления отраженный световой пучок наблюдается под углом, который больше критического угла для границы раздела 14 валик/воздух, при этом обнаруживается очень маленькая часть отраженного света. Вместо этого, обнаруженный световой пучок соответствует, в основном, световому пучку, рассеянному от руки. В изображениях, полученных с помощью этого варианта осуществления, выступы и другие особенности находящейся в контакте руки несколько ярче, чем впадины и другие не находящиеся в контакте области руки. ФОРМУЛА ИЗОБРЕТЕНИЯ Устройство для оптического воспроизведения изображения особенностей на поверхности руки, содержащее источник света для освещения области изображения, вращающийся прозрачный цилиндр, имеющий цилиндрическую контактную поверхность для обеспечения контакта с рукой и приспособленный для направления частей руки, находящейся в контакте с контактной поверхностью через область изображения, и детектор, установленный с возможностью перехвата светового пучка из области изображения и выработки из него сигнала,представляющего поверхностные особенности руки, находящейся в контакте с контактной поверхностью в области изображения, причем детектор выполнен с возможностью приема, главным образом, светового пучка, который отражается от контактной поверхности под углом наблюдения относительно нормали к контактной поверхности в области изображения, который больше критического угла для границы раздела между контактной поверхностью и водой.
МПК / Метки
МПК: G01J 1/04, G01B 11/24, G06K 9/00
Метки: изображения, устройство, оптического, особенностей, поверхности, руки, воспроизведения, способ
Код ссылки
<a href="https://eas.patents.su/9-5038-ustrojjstvo-i-sposob-opticheskogo-vosproizvedeniya-izobrazheniya-osobennostejj-na-poverhnosti-ruki.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство и способ оптического воспроизведения изображения особенностей на поверхности руки</a>
Устройство и способ оптического воспроизведения изображения особенностей на поверхности руки
Номер патента: 3795
Опубликовано: 30.10.2003
Автор: Сартор Томас Ф.
МПК: G06K 9/00, G01J 1/04, G01B 11/24...
Метки: особенностей, устройство, поверхности, способ, оптического, руки, воспроизведения, изображения
Формула / Реферат:
1. Устройство для оптического воспроизведения изображения особенностей руки, содержащее источник света для освещения области изображения, средство, задающее направление перемещения частей руки через область изображения, имеющее выпуклую контактную поверхность для руки, детектор, установленный с возможностью перехвата светового пучка из области изображения и выработки из него сигнала, представляющего собой поверхностные особенности руки,...
Устройство и способ для фотографирования трехмерного изображения, устройство и способ для воспроизведения трехмерного изображения и устройство и способ для изменения положения воспроизводимого трехмерного изображения
Номер патента: 3495
Опубликовано: 26.06.2003
Авторы: Киношита Масахару, Хоримаи Хидейоши
МПК: G03B 35/02, G02B 27/22, H04N 13/00...
Метки: фотографирования, положения, изображения, изменения, воспроизведения, устройство, трехмерного, способ, воспроизводимого
Формула / Реферат:
1. Устройство для формирования информации об изображении, требуемой для воспроизведения трехмерного изображения объекта в пространстве, содержащее фотографическое средство для формирования информации о двумерных изображениях объекта и средства для последовательного изменения направления фотографирования фотографического средства, включающие отклоняющие средства, расположенные между объектом и фотографическим средством, выделяющие падающий свет...
Состав для печати изображения на поверхности изделия каучукового латекса, способ печати изображения и изделия из каучукового латекса
Номер патента: 164
Опубликовано: 29.10.1998
Авторы: Гаггер Джеймс, Маттески Генри
МПК: C09D 11/02
Метки: изображения, изделия, способ, состав, печати, каучукового, латекса, поверхности
Формула / Реферат:
1. Состав для печати изображения на поверхности изделия из каучукового латекса, которое устойчиво к истиранию и химическому воздействию, содержащий натуральный каучук, растворитель натурального каучука и пигмент, отличающийся тем, что включает в качестве компонентов: a) композицию для формирования прозрачного слоя, состоящую из натурального каучука и его растворителя, b) предварительно смешанную композицию, включающую ароматический...
Устройство для создания интерактивного оптического поля и способ формирования интерактивного оптического поля
Номер патента: 721
Опубликовано: 28.02.2000
Автор: Гольдман Нейл
МПК: G02B 1/00
Метки: формирования, поля, интерактивного, устройство, оптического, способ, создания
Формула / Реферат:
1. Устройство для создания интерактивного оптического поля (ИОП), содержащее прозрачную линзу; матрицу светопроводящих устройств, расположенных на или в прозрачной линзе, причем матрица светопроводящих устройств является, в основном, прозрачной для человеческого глаза; оптический датчик, соединенный с матрицей светопроводящих устройств, для улавливания света, отраженного от человеческого глаза; источник света, излучающий свет, передаваемый...
Способ (варианты) и устройство воспроизведения данных о сходстве объектов в многомерном пространстве
Номер патента: 3796
Опубликовано: 30.10.2003
Авторы: Сейллем Францис Р., Аграфиотис Димитрис К., Лобанов Виктор С.
МПК: G06T 11/20
Метки: объектов, многомерном, устройство, варианты, данных, сходстве, воспроизведения, пространстве, способ
Формула / Реферат:
1. Способ воспроизведения данных о сходстве объектов в многомерном пространстве посредством воспроизведения взаимосвязи между объектами в качестве расстояния от одного к другому на дисплейной карте, отличающийся тем, что сначала объектам присваивают координаты и помещают объекты на дисплейной карте в соответствии с присвоенными им координатам, затем выделяют подгруппу объектов по признакам ассоциированных взаимосвязей между объектами, после...
Предыдущий патент: Фильтрующий материал и способ его изготовления
Следующий патент: Способ извлечения гомогенных металлгидридных катализаторов
Случайный патент: Способ лечения бактериальной инфекции и фармацевтическая композиция для его осуществления