Устройство и способ измерения пространственных перемещений производственных конструкций
Формула / Реферат
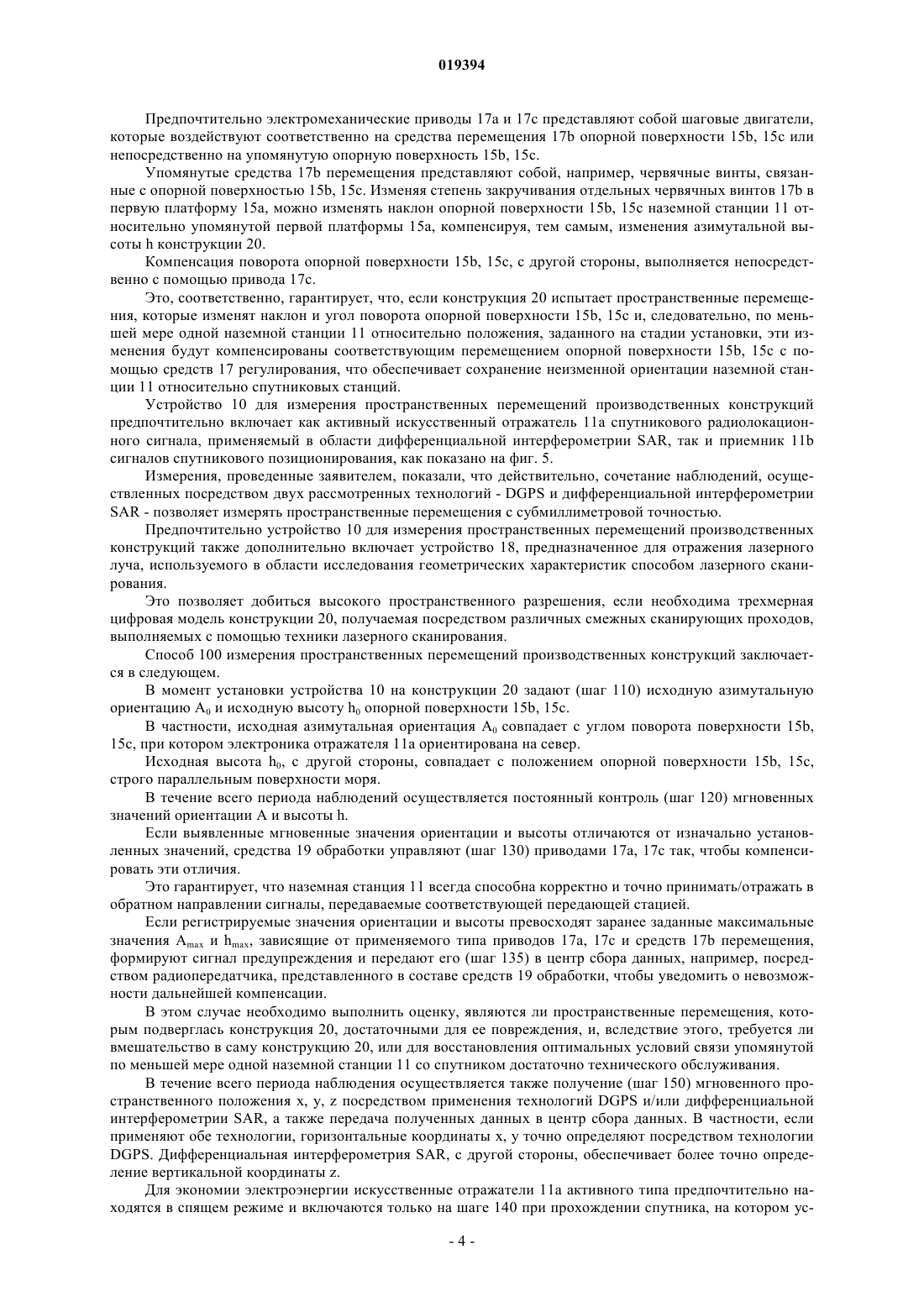
1. Устройство (10) для измерения пространственных перемещений производственной конструкции (20), включающее по меньшей мере одну наземную станцию (11), осуществляющую связь по меньшей мере с одной соответствующей спутниковой станцией, передающей сигнал, при этом упомянутая наземная станция (11) подвижно соединена с опорой (12), жестко закрепленной на упомянутой производственной конструкции (20), и имеет исходную азимутальную ориентацию (А0) и исходную азимутальную высоту (h0), отличающееся тем, что упомянутая наземная станция (11) выполнена с возможностью перемещения относительно упомянутой опоры с помощью средств (17) регулировки ориентации и высоты наземной станции (11) так, чтобы компенсировать отличия мгновенных значений ориентации (А) и высоты (h) от упомянутых исходных значений ориентации (А0) и высоты (h0).
2. Устройство по п.1, отличающееся тем, что упомянутая наземная станция (11) целиком закреплена поверх опорной поверхности (15b, 15c), a упомянутая опора (12) включает первую платформу (15а), к которой присоединена упомянутая опорная поверхность (15b, 15с), при этом упомянутые средства (17) регулировки ориентации и высоты наземной станции (11) выполнены с возможностью изменения взаимного положения упомянутой опорной поверхности (15b, 15с) и упомянутой первой платформы (15а).
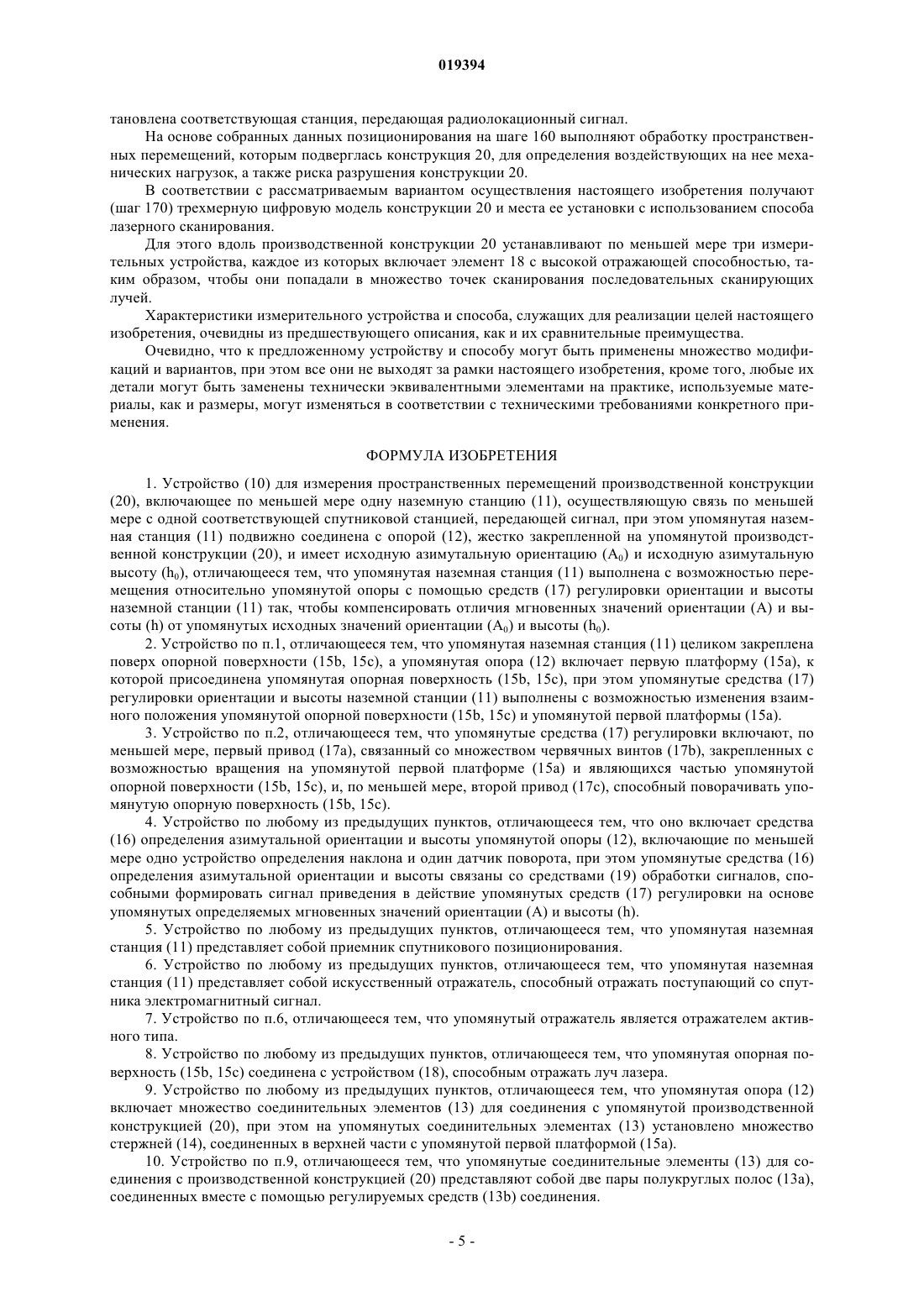
3. Устройство по п.2, отличающееся тем, что упомянутые средства (17) регулировки включают, по меньшей мере, первый привод (17а), связанный со множеством червячных винтов (17b), закрепленных с возможностью вращения на упомянутой первой платформе (15а) и являющихся частью упомянутой опорной поверхности (15b, 15с), и, по меньшей мере, второй привод (17с), способный поворачивать упомянутую опорную поверхность (15b, 15с).
4. Устройство по любому из предыдущих пунктов, отличающееся тем, что оно включает средства (16) определения азимутальной ориентации и высоты упомянутой опоры (12), включающие по меньшей мере одно устройство определения наклона и один датчик поворота, при этом упомянутые средства (16) определения азимутальной ориентации и высоты связаны со средствами (19) обработки сигналов, способными формировать сигнал приведения в действие упомянутых средств (17) регулировки на основе упомянутых определяемых мгновенных значений ориентации (А) и высоты (h).
5. Устройство по любому из предыдущих пунктов, отличающееся тем, что упомянутая наземная станция (11) представляет собой приемник спутникового позиционирования.
6. Устройство по любому из предыдущих пунктов, отличающееся тем, что упомянутая наземная станция (11) представляет собой искусственный отражатель, способный отражать поступающий со спутника электромагнитный сигнал.
7. Устройство по п.6, отличающееся тем, что упомянутый отражатель является отражателем активного типа.
8. Устройство по любому из предыдущих пунктов, отличающееся тем, что упомянутая опорная поверхность (15b, 15с) соединена с устройством (18), способным отражать луч лазера.
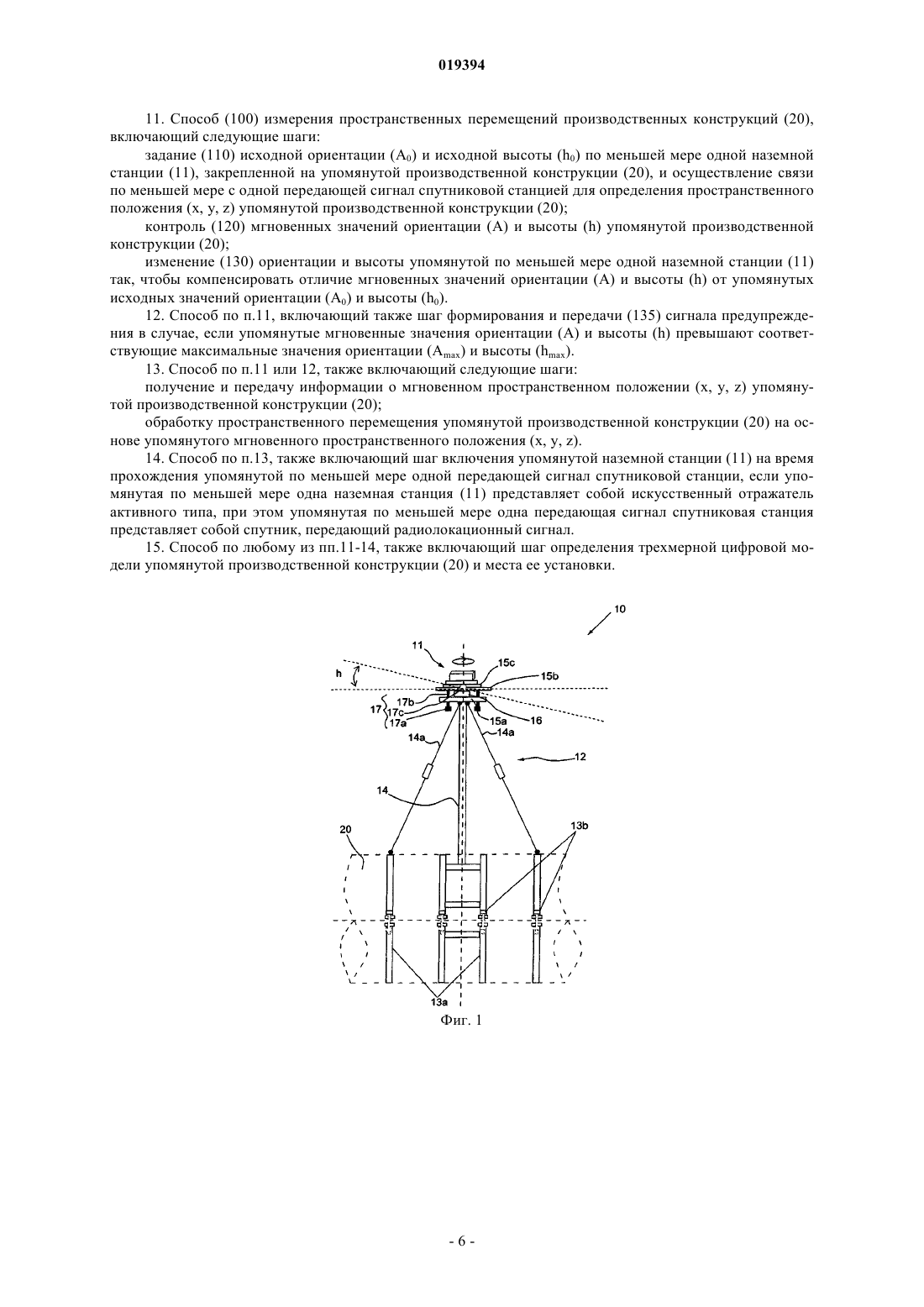
9. Устройство по любому из предыдущих пунктов, отличающееся тем, что упомянутая опора (12) включает множество соединительных элементов (13) для соединения с упомянутой производственной конструкцией (20), при этом на упомянутых соединительных элементах (13) установлено множество стержней (14), соединенных в верхней части с упомянутой первой платформой (15а).
10. Устройство по п.9, отличающееся тем, что упомянутые соединительные элементы (13) для соединения с производственной конструкцией (20) представляют собой две пары полукруглых полос (13а), соединенных вместе с помощью регулируемых средств (13b) соединения.
11. Способ (100) измерения пространственных перемещений производственных конструкций (20), включающий следующие шаги:
задание (110) исходной ориентации (А0) и исходной высоты (h0) по меньшей мере одной наземной станции (11), закрепленной на упомянутой производственной конструкции (20), и осуществление связи по меньшей мере с одной передающей сигнал спутниковой станцией для определения пространственного положения (x, y, z) упомянутой производственной конструкции (20);
контроль (120) мгновенных значений ориентации (А) и высоты (h) упомянутой производственной конструкции (20);
изменение (130) ориентации и высоты упомянутой по меньшей мере одной наземной станции (11) так, чтобы компенсировать отличие мгновенных значений ориентации (А) и высоты (h) от упомянутых исходных значений ориентации (А0) и высоты (h0).
12. Способ по п.11, включающий также шаг формирования и передачи (135) сигнала предупреждения в случае, если упомянутые мгновенные значения ориентации (А) и высоты (h) превышают соответствующие максимальные значения ориентации (Amax) и высоты (hmax).
13. Способ по п.11 или 12, также включающий следующие шаги:
получение и передачу информации о мгновенном пространственном положении (x, y, z) упомянутой производственной конструкции (20);
обработку пространственного перемещения упомянутой производственной конструкции (20) на основе упомянутого мгновенного пространственного положения (x, y, z).
14. Способ по п.13, также включающий шаг включения упомянутой наземной станции (11) на время прохождения упомянутой по меньшей мере одной передающей сигнал спутниковой станции, если упомянутая по меньшей мере одна наземная станция (11) представляет собой искусственный отражатель активного типа, при этом упомянутая по меньшей мере одна передающая сигнал спутниковая станция представляет собой спутник, передающий радиолокационный сигнал.
15. Способ по любому из пп.11-14, также включающий шаг определения трехмерной цифровой модели упомянутой производственной конструкции (20) и места ее установки.
Текст
УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ ПЕРЕМЕЩЕНИЙ ПРОИЗВОДСТВЕННЫХ КОНСТРУКЦИЙ Настоящее изобретение относится к устройству и способу измерения пространственных перемещений производственных конструкций, таких как трубы, вследствие, например,перемещений грунта в результате оползневых явлений, просадки грунта, провалов или дифференциального оседания. Устройство (10) для измерения пространственных перемещений производственной конструкции (20) в соответствии с настоящим изобретением включает по меньшей мере одну наземную станцию (11), которая осуществляет связь по меньшей мере с одной спутниковой станцией, передающей сигнал, при этом упомянутая наземная станция (11) подвижно соединена с опорой (12), жестко закрепленной на упомянутой производственной конструкции (20),и имеет исходную азимутальную ориентацию (А 0) и исходную азимутальную высоту (h0), причем наземная станция (11) перемещается относительно опоры (12) с помощью средств (17) регулировки ориентации и высоты наземной станции (11) так, чтобы компенсировать отличия мгновенных значений ориентации (А) и высоты (h) от исходных значений ориентации (А 0) и высоты (h0). Изобретение относится к устройству и способу измерения пространственных перемещений производственных конструкций, таких как трубы, вследствие, например, перемещений грунта при оползневых явлениях, просадки грунта, провалов или дифференциального оседания. В области транспортировки жидкостей под низким или высоким давлением, например газа, нефти или воды, необходимо осуществлять контроль используемого трубопровода для оценки напряжений,которым они подвержены вследствие оползней или, в общем случае, оседания грунта. Подобные ситуации могут привести к возникновению сжатий или напряжений в конструкции или к ее деформации, что может привести к разрушениям, например, сварных швов. Контроль пространственных перемещений подобных конструкций, следовательно, позволяет осуществлять прогноз рисков их разрушения. В области оценки перемещения грунта, а следовательно, и встроенных в него конструкций используют, например, спутниковые системы позиционирования, такие как, например, глобальная система позиционирования (Global Positioning System, GPS), глобальная навигационная спутниковая система (Global Navigation Satellite System, GLONASS) или система Galileo. Предпочтительно используют дифференциальные спутниковые системы позиционирования, известные как DGPS (Differential GPS), которые, помимо высокой точности при горизонтальных измерениях (координаты х и у), обеспечивают также повышенную достоверность измерений высоты (координатаz), по сравнению с обычными системами GPS, что обеспечивает их независимость от воздействия, которое оказывает на спутниковый сигнал его прохождение через атмосферу. Система DGPS включает два наземных приемника сигналов, передаваемых множеством спутников,которые формируют часть существующей системы позиционирования (GPS, Glonass или Galileo), в которой первый приемник является опорной станцией, а второй приемник называют "подвижной станцией". На основе отличий в измерениях, осуществляемых обоими приемниками, можно определить расстояние между ними по наклонной линии и остаточные погрешности, по которым можно без погрешности получить трехмерные координаты подвижного приемника, если известны трехмерные координаты х,у и z опорного приемника. Таким образом, можно получить измерения с точностью до метров или сантиметров, в зависимости от того, используют ли также фазу для вычисления упомянутой разности. На практике, между двумя упомянутыми приемниками и спутником могут существовать препятствия, например деревья, здания, горы и т.п. Кроме того, качество сигнала может ухудшаться вследствие помех, возникающих, например, из-за близости линий электропередачи или антенн. Следовательно, ориентация приемников относительно спутников важна, чтобы гарантировать оптимальную передачу сигнала в присутствии препятствий и помех. Современные средства спутникового позиционирования позволяют задавать минимальный угол отсечки, что обеспечивает возможность отслеживания и последующего отбрасывания низко расположенных спутников, которые наиболее часто подвержены проблемам, связанным с искажениями сигнала в атмосфере. Однако при отбрасывании части доступных спутников снижается точность наблюдений, в частности измерений высоты (координата z). Еще одним известным в настоящее время способом измерения перемещений грунта и встроенных в него конструкций является дифференциальная радиолокационная интерферометрия. Этот способ основан на измерении разности фаз двух радиолокационных сигналов, относящихся к одной и той же точке,каждый из которых передается со спутника при одном из его проходов и отражается от земли. На основе этого измерения можно с высокой точностью установить перемещение по вертикали (координату z), которое произошло между двумя проходами спутника, и в некоторых случаях также горизонтальные перемещения (координаты x, y). Учитывая, что проходы спутника происходят, как правило, примерно каждые 35 дней, очевидно,такой способ подходит для измерений медленных перемещений, например оседания грунта или медленных оползней. В данном способе выполняют обработку данных радиолокации, полученных посредством систем радаров с синтезированной апертурой (Synthetic Aperture Radar, SAR), которые включают средства излучения сигнала и датчик, установленные на спутнике. Средства излучения в системах SAR передают в направлении Земли сигналы в СВЧ-диапазоне, а датчик используют для приема комплексного сигнала обратного рассеяния, отраженного от поверхности земли. Фаза радиолокационного сигнала, передаваемого системой SAR и отраженного от поверхности земли, пропорциональна расстоянию от спутника до точки поверхности, в которой происходит упомянутое отражение. Следовательно, разность фаз между двумя изображениями SAR одной и той же области,полученных в различные моменты времени, непосредственно связана с опусканием или подъемом объекта изображения, произошедшим в интервале времени между первым и вторым моментом получения данных. Развитие дифференциальной радиолокационной интерферометрии предусматривает превентивную идентификацию посредством статистического анализа множества точек с оптимизированным отражением и возможность хранения отражательных характеристик в различные моменты времени, на основе чего можно будет осуществить измерения оседания. Измерения, выполняемые в одной точке, идентифицированной описанным выше образом, которую называют "постоянным отражателем", позволяют определять перемещения по вертикали (координата z) с точностью до миллиметров. При высокой пространственной плотности постоянных отражателей можно также получить хорошие результаты и для горизонтальных измерений (координаты x и y) грунта и/или установленных на нем конструкций в различные моменты времени. В случае недостатка естественных постоянных отражателей обычно устанавливают специальные искусственные постоянные отражатели пассивного или активного типа, распределяя их по области,представляющей интерес. Искусственные отражатели пассивного типа характеризуются низкой стоимостью и не требуют специфического технического обслуживания, однако обладают недостатком, заключающимся в относительно крупном размере и чувствительности к ориентации относительно спутника. Следовательно, в момент установки отражатель должен быть очень точно ориентирован относительно выбранного спутника, при этом он предназначен для отражения сигнала, передаваемого именно этим спутником. Активные отражатели, с другой стороны, представляют собой компактные системы, которые характеризуются уменьшенными размерами, что облегчает их установку на земле и транспортировку до места установки. Преимущество подобных отражателей заключается в отсутствие необходимости в точно направленной ориентации и в чувствительности более чем к одному спутнику, при этом в случае точной ориентации обеспечиваются наилучшие условия их функционирования. В заключение необходимо отметить, что для обеспечения функционирования известные в настоящее время способы требуют точного и стабильного во времени позиционирования соответствующих наземных станций (т.е. отражателей и наземных приемников). После установки как активных, так и пассивных отражателей дифференциальной радиолокационной интерферометрии, а также приемников DGPS в области контроля, они подвержены возможным морфологическим изменениям и изменениям вследствие деятельности человека на Земле. Системы оценки перемещения грунта и установленных на нем конструкций, рассмотренные выше,следовательно, не способны длительное время поддерживать степень точности, обеспечиваемую на момент установки. Если указанные наземные отражатели интегрируют в контролируемые производственные конструкции, например путем сварного или полимерного клеевого соединения, снимается проблема изменений, связанных с человеческим фактором или животными, а также атмосферными явлениями, имеющими высокую интенсивность. Однако в этом случае система также не способна в течение длительного времени поддерживать степень точности, обеспечиваемую на момент установки, поскольку даже небольшое пространственное перемещение конструкции вследствие оседания грунта может привести к неоптимальному позиционированию наземных станций относительно спутников, снижая, таким образом, обнаружительную способность системы. Целью настоящего изобретения является преодоление описанных выше недостатков и, в частности,создание устройства и способа измерения пространственных перемещений производственных конструкций, которые способны длительное время поддерживать точность измерений, обеспечиваемую на момент установки. Еще одной целью настоящего изобретения является создание устройства и способа измерения пространственных перемещений производственных конструкций, которые почти не подвержены изменениям вследствие деятельности человека на Земле или атмосферных явлений высокой интенсивности. Еще одной целью настоящего изобретения является создание устройства и способа измерения пространственных перемещений производственных конструкций, которые способны обеспечить субмиллиметровую точность выполняемых измерений. Эти, а также другие цели в соответствии с настоящим изобретением достигаются с помощью предложенных устройства и способа измерений пространственных перемещений производственных конструкций, соответствующих независимым пунктам формулы изобретения. Дополнительные характеристики устройства и способа измерения пространственных перемещений производственных конструкций приведены в зависимых пунктах формулы изобретения. Характеристики и преимущества устройства и способа измерения пространственных перемещений производственных конструкций в соответствии с настоящим изобретением станут более понятными из дальнейшего иллюстративного описания, не ограничивающего настоящее изобретение, со ссылками на приложенные чертежи, на которых: фиг. 1 представляет собой вертикальный вид сбоку первого варианта осуществления устройства для измерения пространственных перемещений производственных конструкций в соответствии с настоящим изобретением; фиг. 2 представляет собой вид спереди устройства для измерения пространственных перемещений производственных конструкций, показанного на фиг. 1; фиг. 3 представляет собой вид сверху устройства для измерения пространственных перемещений производственных конструкций, показанного на фиг. 1; фиг. 4 представляет собой детальный чертеж устройства для измерения пространственных перемещений производственных конструкций, показанного на фиг. 1; фиг. 5 представляет собой второй вариант осуществления устройства для измерения пространственных перемещений производственных конструкций в соответствии с настоящим изобретением; фиг. 6 представляет собой блок-схему алгоритма способа измерения пространственных перемещений производственных конструкций в соответствии с настоящим изобретением. Показанное на чертежах устройство для измерения пространственных перемещений производственных конструкций в соответствии с настоящим изобретением в целом обозначено позицией 10. Для выполнения упомянутых измерений, как правило, используют системы, состоящие из одного или более измерительных устройств 10 в соответствии с настоящим изобретением, которые осуществляют связь по меньшей мере с одной соответствующей спутниковой станцией, передающей сигналы. С этой целью измерительное устройство 10 включает по меньшей мере одну наземную станцию 11,способную осуществлять связь со спутниковой станцией, передающей сигнал. В соответствии с применяемой технологией упомянутая по меньшей мере одна наземная станция 11 представляет собой приемник 11b спутниковой системы позиционирования (GPS, Glonass или Galileo),используемый в случае наблюдений с помощью DGPS и/или искусственный отражатель 11 а спутникового радиолокационного сигнала, используемый при применении дифференциальной интерферометрииSAR. Аналогично, в соответствии с применяемой технологией упомянутая по меньшей мере одна спутниковая станция, передающая сигнал, представляет собой соответственно спутник системы спутникового позиционирования (GPS, Glonass или Galileo) или, в дополнение, спутник, оснащенный средствами испускания сигналов в СВЧ-диапазоне, которые используют в дифференциальной интерферометрии. Предпочтительно, в случае дифференциальной интерферометрии SAR, используют искусственный отражатель 11 а активного типа, предъявляющий меньшие требования к препятствиям, что также упрощает его установку на производственную конструкцию 20, расположенную в грунте. В соответствии с настоящим изобретением наземная станция 11 закреплена с возможностью регулировки на опоре 12, которая может быть жестко соединена с производственной конструкцией 20. В проиллюстрированном варианте осуществления настоящего изобретения опора 12 состоит из соединительных элементов 13, предназначенных для присоединения к конструкции 20, на которых установлено множество практически вертикальных стержней 14, оснащенных упругими компенсаторами 14 а и прикрепленных в верхней части к первой платформе 15 а. В случае, когда производственная конструкция 20 имеет цилиндрическую форму, соединительные средства 13 для соединения с конструкцией 20 предпочтительно формируют посредством двух пар полукруглых полос 13 а, выполненных из слегка упругого материала, скрепленных друг с другом посредством регулируемых соединительных средств 13b и оснащенных упругими компенсаторами 13 с. По меньшей мере одну наземную станцию 11 предпочтительно закрепляют как единое целое сверху, на второй платформе 15b, которая выполняет роль опорной поверхности для наземной станции 11 или опоры специальной опорной поверхности 15 с. Упомянутые опорные поверхности 15b, 15 с соединены, в свою очередь, с первой платформой 15 а опоры 12 с помощью средств 17 регулировки азимутальной ориентации и высоты, предназначенных для изменения взаимного расположения опорных поверхностей 15b, 15 с и первой платформы 15 а. Для автоматической регулировки взаимного расположения наземной станции 11 и опоры 12 предусмотрены средства 16 определения мгновенных азимутальных координат, т.е. азимутальной ориентации А и высоты h первой платформы 15 а, а следовательно, и конструкции 20, на которой первая платформа 15 а целиком закреплена посредством стержней 14 и средств 13 соединения. Упомянутые средства 16 определения азимутальных координат включают по меньшей мере одно устройство определения наклона или наклономер и датчик поворота для определения высоты h и азимута А первой платформы 15 а, соответственно, относительно наклона и исходного угла поворота, заданных в момент установки измерительного устройства 10. Наклономер и датчик угла поворота соединены со средствами 19 обработки данных, предпочтительно оснащенных радиопередатчиком, которые, на основе показаний высоты h и мгновенной азимутальной ориентации А, формируют управляющий сигнал для средств 17 регулировки и, в частности, по меньшей мере, для первого электромеханического привода 17 а, способного изменять наклон, и, по меньшей мере, для второго электромеханического привода 17 с, способного изменять угол поворота опорной поверхности 15b, 15 с относительной первой платформы 15 а и, следовательно, относительно конструкции 20. Предпочтительно электромеханические приводы 17 а и 17 с представляют собой шаговые двигатели,которые воздействуют соответственно на средства перемещения 17b опорной поверхности 15b, 15 с или непосредственно на упомянутую опорную поверхность 15b, 15 с. Упомянутые средства 17b перемещения представляют собой, например, червячные винты, связанные с опорной поверхностью 15b, 15 с. Изменяя степень закручивания отдельных червячных винтов 17b в первую платформу 15 а, можно изменять наклон опорной поверхности 15b, 15 с наземной станции 11 относительно упомянутой первой платформы 15 а, компенсируя, тем самым, изменения азимутальной высоты h конструкции 20. Компенсация поворота опорной поверхности 15b, 15 с, с другой стороны, выполняется непосредственно с помощью привода 17 с. Это, соответственно, гарантирует, что, если конструкция 20 испытает пространственные перемещения, которые изменят наклон и угол поворота опорной поверхности 15b, 15 с и, следовательно, по меньшей мере одной наземной станции 11 относительно положения, заданного на стадии установки, эти изменения будут компенсированы соответствующим перемещением опорной поверхности 15b, 15 с с помощью средств 17 регулирования, что обеспечивает сохранение неизменной ориентации наземной станции 11 относительно спутниковых станций. Устройство 10 для измерения пространственных перемещений производственных конструкций предпочтительно включает как активный искусственный отражатель 11 а спутникового радиолокационного сигнала, применяемый в области дифференциальной интерферометрии SAR, так и приемник 11b сигналов спутникового позиционирования, как показано на фиг. 5. Измерения, проведенные заявителем, показали, что действительно, сочетание наблюдений, осуществленных посредством двух рассмотренных технологий - DGPS и дифференциальной интерферометрииSAR - позволяет измерять пространственные перемещения с субмиллиметровой точностью. Предпочтительно устройство 10 для измерения пространственных перемещений производственных конструкций также дополнительно включает устройство 18, предназначенное для отражения лазерного луча, используемого в области исследования геометрических характеристик способом лазерного сканирования. Это позволяет добиться высокого пространственного разрешения, если необходима трехмерная цифровая модель конструкции 20, получаемая посредством различных смежных сканирующих проходов,выполняемых с помощью техники лазерного сканирования. Способ 100 измерения пространственных перемещений производственных конструкций заключается в следующем. В момент установки устройства 10 на конструкции 20 задают (шаг 110) исходную азимутальную ориентацию А 0 и исходную высоту h0 опорной поверхности 15b, 15 с. В частности, исходная азимутальная ориентация А 0 совпадает с углом поворота поверхности 15b,15 с, при котором электроника отражателя 11 а ориентирована на север. Исходная высота h0, с другой стороны, совпадает с положением опорной поверхности 15b, 15 с,строго параллельным поверхности моря. В течение всего периода наблюдений осуществляется постоянный контроль (шаг 120) мгновенных значений ориентации А и высоты h. Если выявленные мгновенные значения ориентации и высоты отличаются от изначально установленных значений, средства 19 обработки управляют (шаг 130) приводами 17 а, 17 с так, чтобы компенсировать эти отличия. Это гарантирует, что наземная станция 11 всегда способна корректно и точно принимать/отражать в обратном направлении сигналы, передаваемые соответствующей передающей стацией. Если регистрируемые значения ориентации и высоты превосходят заранее заданные максимальные значения Amax и hmax, зависящие от применяемого типа приводов 17 а, 17 с и средств 17b перемещения,формируют сигнал предупреждения и передают его (шаг 135) в центр сбора данных, например, посредством радиопередатчика, представленного в составе средств 19 обработки, чтобы уведомить о невозможности дальнейшей компенсации. В этом случае необходимо выполнить оценку, являются ли пространственные перемещения, которым подверглась конструкция 20, достаточными для ее повреждения, и, вследствие этого, требуется ли вмешательство в саму конструкцию 20, или для восстановления оптимальных условий связи упомянутой по меньшей мере одной наземной станции 11 со спутником достаточно технического обслуживания. В течение всего периода наблюдения осуществляется также получение (шаг 150) мгновенного пространственного положения x, y, z посредством применения технологий DGPS и/или дифференциальной интерферометрии SAR, а также передача полученных данных в центр сбора данных. В частности, если применяют обе технологии, горизонтальные координаты x, y точно определяют посредством технологииDGPS. Дифференциальная интерферометрия SAR, с другой стороны, обеспечивает более точно определение вертикальной координаты z. Для экономии электроэнергии искусственные отражатели 11 а активного типа предпочтительно находятся в спящем режиме и включаются только на шаге 140 при прохождении спутника, на котором ус-4 019394 тановлена соответствующая станция, передающая радиолокационный сигнал. На основе собранных данных позиционирования на шаге 160 выполняют обработку пространственных перемещений, которым подверглась конструкция 20, для определения воздействующих на нее механических нагрузок, а также риска разрушения конструкции 20. В соответствии с рассматриваемым вариантом осуществления настоящего изобретения получают(шаг 170) трехмерную цифровую модель конструкции 20 и места ее установки с использованием способа лазерного сканирования. Для этого вдоль производственной конструкции 20 устанавливают по меньшей мере три измерительных устройства, каждое из которых включает элемент 18 с высокой отражающей способностью, таким образом, чтобы они попадали в множество точек сканирования последовательных сканирующих лучей. Характеристики измерительного устройства и способа, служащих для реализации целей настоящего изобретения, очевидны из предшествующего описания, как и их сравнительные преимущества. Очевидно, что к предложенному устройству и способу могут быть применены множество модификаций и вариантов, при этом все они не выходят за рамки настоящего изобретения, кроме того, любые их детали могут быть заменены технически эквивалентными элементами на практике, используемые материалы, как и размеры, могут изменяться в соответствии с техническими требованиями конкретного применения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство (10) для измерения пространственных перемещений производственной конструкции(20), включающее по меньшей мере одну наземную станцию (11), осуществляющую связь по меньшей мере с одной соответствующей спутниковой станцией, передающей сигнал, при этом упомянутая наземная станция (11) подвижно соединена с опорой (12), жестко закрепленной на упомянутой производственной конструкции (20), и имеет исходную азимутальную ориентацию (А 0) и исходную азимутальную высоту (h0), отличающееся тем, что упомянутая наземная станция (11) выполнена с возможностью перемещения относительно упомянутой опоры с помощью средств (17) регулировки ориентации и высоты наземной станции (11) так, чтобы компенсировать отличия мгновенных значений ориентации (А) и высоты (h) от упомянутых исходных значений ориентации (А 0) и высоты (h0). 2. Устройство по п.1, отличающееся тем, что упомянутая наземная станция (11) целиком закреплена поверх опорной поверхности (15b, 15c), a упомянутая опора (12) включает первую платформу (15 а), к которой присоединена упомянутая опорная поверхность (15b, 15 с), при этом упомянутые средства (17) регулировки ориентации и высоты наземной станции (11) выполнены с возможностью изменения взаимного положения упомянутой опорной поверхности (15b, 15 с) и упомянутой первой платформы (15 а). 3. Устройство по п.2, отличающееся тем, что упомянутые средства (17) регулировки включают, по меньшей мере, первый привод (17 а), связанный со множеством червячных винтов (17b), закрепленных с возможностью вращения на упомянутой первой платформе (15 а) и являющихся частью упомянутой опорной поверхности (15b, 15 с), и, по меньшей мере, второй привод (17 с), способный поворачивать упомянутую опорную поверхность (15b, 15 с). 4. Устройство по любому из предыдущих пунктов, отличающееся тем, что оно включает средства(16) определения азимутальной ориентации и высоты упомянутой опоры (12), включающие по меньшей мере одно устройство определения наклона и один датчик поворота, при этом упомянутые средства (16) определения азимутальной ориентации и высоты связаны со средствами (19) обработки сигналов, способными формировать сигнал приведения в действие упомянутых средств (17) регулировки на основе упомянутых определяемых мгновенных значений ориентации (А) и высоты (h). 5. Устройство по любому из предыдущих пунктов, отличающееся тем, что упомянутая наземная станция (11) представляет собой приемник спутникового позиционирования. 6. Устройство по любому из предыдущих пунктов, отличающееся тем, что упомянутая наземная станция (11) представляет собой искусственный отражатель, способный отражать поступающий со спутника электромагнитный сигнал. 7. Устройство по п.6, отличающееся тем, что упомянутый отражатель является отражателем активного типа. 8. Устройство по любому из предыдущих пунктов, отличающееся тем, что упомянутая опорная поверхность (15b, 15 с) соединена с устройством (18), способным отражать луч лазера. 9. Устройство по любому из предыдущих пунктов, отличающееся тем, что упомянутая опора (12) включает множество соединительных элементов (13) для соединения с упомянутой производственной конструкцией (20), при этом на упомянутых соединительных элементах (13) установлено множество стержней (14), соединенных в верхней части с упомянутой первой платформой (15 а). 10. Устройство по п.9, отличающееся тем, что упомянутые соединительные элементы (13) для соединения с производственной конструкцией (20) представляют собой две пары полукруглых полос (13 а),соединенных вместе с помощью регулируемых средств (13b) соединения. 11. Способ (100) измерения пространственных перемещений производственных конструкций (20),включающий следующие шаги: задание (110) исходной ориентации (А 0) и исходной высоты (h0) по меньшей мере одной наземной станции (11), закрепленной на упомянутой производственной конструкции (20), и осуществление связи по меньшей мере с одной передающей сигнал спутниковой станцией для определения пространственного положения (x, y, z) упомянутой производственной конструкции (20); контроль (120) мгновенных значений ориентации (А) и высоты (h) упомянутой производственной конструкции (20); изменение (130) ориентации и высоты упомянутой по меньшей мере одной наземной станции (11) так, чтобы компенсировать отличие мгновенных значений ориентации (А) и высоты (h) от упомянутых исходных значений ориентации (А 0) и высоты (h0). 12. Способ по п.11, включающий также шаг формирования и передачи (135) сигнала предупреждения в случае, если упомянутые мгновенные значения ориентации (А) и высоты (h) превышают соответствующие максимальные значения ориентации (Amax) и высоты (hmax). 13. Способ по п.11 или 12, также включающий следующие шаги: получение и передачу информации о мгновенном пространственном положении (x, y, z) упомянутой производственной конструкции (20); обработку пространственного перемещения упомянутой производственной конструкции (20) на основе упомянутого мгновенного пространственного положения (x, y, z). 14. Способ по п.13, также включающий шаг включения упомянутой наземной станции (11) на время прохождения упомянутой по меньшей мере одной передающей сигнал спутниковой станции, если упомянутая по меньшей мере одна наземная станция (11) представляет собой искусственный отражатель активного типа, при этом упомянутая по меньшей мере одна передающая сигнал спутниковая станция представляет собой спутник, передающий радиолокационный сигнал. 15. Способ по любому из пп.11-14, также включающий шаг определения трехмерной цифровой модели упомянутой производственной конструкции (20) и места ее установки.
МПК / Метки
МПК: G01M 5/00, G01S 13/76, H01Q 1/18
Метки: пространственных, конструкций, устройство, измерения, перемещений, способ, производственных
Код ссылки
<a href="https://eas.patents.su/9-19394-ustrojjstvo-i-sposob-izmereniya-prostranstvennyh-peremeshhenijj-proizvodstvennyh-konstrukcijj.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство и способ измерения пространственных перемещений производственных конструкций</a>
Устройство для измерения концентрации, испытательная полоска для устройства для измерения концентрации, биосенсорная система и способ формирования контактных площадок на испытательной полоске
Номер патента: 2856
Опубликовано: 31.10.2002
Авторы: Исида Кохеи, Токуно Йосинобу, Каванака Содзи
МПК: G01N 27/28, G01N 27/30, G01N 27/327...
Метки: измерения, формирования, биосенсорная, полоске, полоска, устройства, система, концентрации, испытательной, контактных, устройство, испытательная, способ, площадок
Формула / Реферат:
1. Устройство для измерения концентрации вещества (101, 131, 151, 171, 251, 301, 351), содержащее положительный (102) и отрицательный (103) электроды, которые при вставлении в устройство испытательной полоски (115, 141, 161, 181, 271, 321, 371), имеющей реагент реакции, нанесенный на материал основы и предназначенный реагировать с жидким испытательным образцом, и положительную (117, 273, 323) и отрицательную (119, 274, 324) контактные площадки,...
Способ изготовления решётчатых конструкций и устройство для его реализации
Номер патента: 5848
Опубликовано: 30.06.2005
Авторы: Муравьев Владимир Михайлович, Овчинников Игорь Георгиевич, Муравьев Юрий Владимирович
МПК: B23K 31/02, B21F 27/10
Метки: устройство, изготовления, конструкций, реализации, решётчатых, способ
Формула / Реферат:
1. Способ изготовления решетчатых конструкций, включающий формирование заготовки из элементов, их сварку и последующее растяжение с требуемым коэффициентом растяжения, отличающийся тем, что элементы укладывают вплотную друг к другу, осуществляют дуговую сварку в защитной атмосфере швами заданной протяженности локально в заданных точках, определяющих характер рисунка решетки и прочность соединения элементов. 2. Способ по п.1, отличающийся тем,...
Способ и устройство для сооружения автоматически конгломерируемых конструкций
Номер патента: 11978
Опубликовано: 30.06.2009
Авторы: Дини Энрико, Наннини Роберто, Чиаруги Морено
МПК: B29C 67/00, B29C 67/24
Метки: способ, конгломерируемых, сооружения, устройство, автоматически, конструкций
Формула / Реферат:
1. Способ автоматического сооружения конгломерируемых конструкций, отличающийся тем, что он включает стадии моделирования с помощью САПР конструкции сооружения, в частности, с функцией САПР моделирования поверхности или объемного моделирования, с получением компьютерного файла модели конструкции; сечения указанного компьютерного файла модели конструкции горизонтальными параллельными плоскостями, в частности равноудаленными плоскостями с...
Способ измерения линейного перемещения объекта и устройство для его осуществления
Номер патента: 13559
Опубликовано: 30.06.2010
Авторы: Данилевский Сергей Леонидович, Данилевский Леонид Николаевич, Зайцев Александр Иванович, Таурогинский Бронислав Иванович
МПК: G01B 11/04, G02B 5/136
Метки: перемещения, осуществления, устройство, измерения, способ, объекта, линейного
Формула / Реферат:
1. Способ измерения линейного перемещения объекта, включающий направление сформированного светового пучка на связанный с объектом отражающий элемент, выполненный таким образом, что его средний коэффициент отражения изменяется в зависимости от координаты X в направлении перемещения объекта, регистрацию отраженного светового излучения, преобразование его в электрический сигнал и определение величины перемещения в соответствии с измеренными...
Электродное устройство для измерения содержания воды в формовочном песке, прибор для измерения содержания воды в формовочном песке и способ и устройство для подачи воды в смеситель
Номер патента: 10398
Опубликовано: 29.08.2008
Авторы: Харада Хисаси, Нисида Тадаси, Сугита Козо
МПК: G01N 27/04, B22C 9/00
Метки: воды, песке, устройство, способ, электродное, формовочном, прибор, измерения, подачи, смеситель, содержания
Формула / Реферат:
1. Устройство для измерения содержания воды в формовочном песке, включающее полый цилиндрический удерживающий элемент из электроизолирующего материала; электропроводящие элементы, имеющие кольцевую форму, расположенные концентрично удерживающему элементу на расстоянии друг от друга и имеющие такой же внешний диаметр, что и удерживающий элемент, и два электрических провода для соединения электропроводящих элементов так, что соседние...
Предыдущий патент: Усилитель, содержащий два усиливающих материала, и шина, содержащая такой усилитель
Следующий патент: Водопотребляющий бытовой прибор с насосом
Случайный патент: Устройство для циркуляции текучей среды