Способ для определения ориентаций приемника
Формула / Реферат
1. Реализуемый с помощью компьютера способ для определения трех независимых углов, определяющих ориентацию электромагнитных приемников при морской электромагнитной съемке, содержащий:
(a) выбор данных съемки согласно критериям, включающим в себя отношение сигнал/шум и степень искажения;
(b) создание модели, отображающей геометрию съемки источник-приемник и среды для передачи электрического сигнала, причем упомянутая модель содержит три угла ориентации приемника, модель удельного сопротивления и электромагнитный источник (передатчик) и параметры приемника; и
(c) решение уравнений электромагнитного поля Максвелла с модельными и выбранными данными съемки в качестве вводной информации и упомянутыми тремя углами ориентации в качестве неизвестных, причем упомянутое решение выполняется посредством итерационного численного обратного преобразования.
2. Способ по п.1, в котором данные съемки преобразовываются в частотную область, по меньшей мере, до решения посредством этапа обратного преобразования.
3. Способ по п.2, в котором преобразование выполняется Фурье преобразованием.
4. Способ по п.1, в котором упомянутая геометрия источник-приемник включает в себя угловые ориентации электромагнитного источника (передатчика) и координаты и приемника, и передатчика.
5. Способ по п.1, дополнительно содержащий:
(d) корректирование модели для включения рассчитанных углов ориентации приемника и повторение этапа обратного преобразования с удельным сопротивлением в качестве неизвестного и
(е) повторение этапа (с) с модельными значениями удельного сопротивления, обновленными до значений удельного сопротивления, рассчитанных на предыдущем этапе.
6. Способ по п.1, в котором удельное сопротивление как функция модельного положения рассматривается как дополнительное неизвестное, которое вычисляется на этапе обратного преобразования.
7. Способ по п.1, в котором модель выбирается из группы, состоящей из одномерной модели, двумерной модели и трехмерной модели.
8. Способ по п.1, в котором упомянутые выбранные данные съемки включают в себя измеренные значения по меньшей мере одной продольной компоненты электромагнитного поля, по меньшей мере одной поперечной компоненты электромагнитного поля и по меньшей мере одной вертикальной компоненты электромагнитного поля.
9. Способ по п.2, в котором выбранные данные съемки выбраны из группы, состоящей из амплитудных данных, фазовых данных и амплитудных, и фазовых данных.
10. Способ по п.1, в котором обратное преобразование выполняется минимизацией целевой функции.
11. Способ по п.10, в котором упомянутая целевая функция есть
целевая функция  ,
,
где  - весовая матрица,
- весовая матрица,  - прямой оператор, линеаризованный из уравнений Максвелла, и р - вектор параметров обратного преобразования, который включает в себя и модель удельного сопротивления среды и ориентации приемника, d - выбранные данные, выраженные в виде вектора, R(m) - регуляризационный член для уменьшения неоднозначности обратного преобразования и l - параметр регуляризации.
- прямой оператор, линеаризованный из уравнений Максвелла, и р - вектор параметров обратного преобразования, который включает в себя и модель удельного сопротивления среды и ориентации приемника, d - выбранные данные, выраженные в виде вектора, R(m) - регуляризационный член для уменьшения неоднозначности обратного преобразования и l - параметр регуляризации.
12. Способ по п.1, в котором упомянутые выбранные данные съемки включают в себя измеренные значения по меньшей мере одной продольной компоненты электромагнитного поля и по меньшей мере одной вертикальной компоненты электромагнитного поля.
13. Способ по п.1, в котором данные съемки, соответствующие удалению источник-приемник, большему, чем предварительно выбранное максимальное значение, и меньшему, чем предварительно выбранное минимальное значение, не выбираются для обратного преобразования, причем упомянутое максимальное значение выбирается, исходя из условия, по меньшей мере частично, анализа сигнал/шум, и упомянутое минимальное значение выбирается, исходя, по меньшей мере частично, из анализа насыщения приемника.
14. Способ по п.11, в котором упомянутое обратное преобразование является среднеквадратичным обратным преобразованием и l=0.
15. Способ по п.1, в котором упомянутые выбранные данные состоят по меньшей мере из трех независимых точек данных.
16. Способ по п.2, в котором выбранные данные съемки выбираются из группы, состоящей из действительной части данных, мнимой части данных и действительных, и мнимых данных.
17. Способ по п.1, в котором упомянутая модель удельного сопротивления включает в себя земной слой и водный слой.
18. Способ по п.17, в котором упомянутая модель удельного сопротивления дополнительно включает в себя воздушный слой.
19. Способ по п.1, в котором параметры упомянутого электромагнитного источника и приемника включают в себя мощность источника и частоту, и длину антенны приемника.
20. Способ добычи углеводородов из подземного пространства, содержащий:
(a) получение данных электромагнитного поля из электромагнитной съемки с управляемым источником подземного пространства;
(b) выбор данных съемки согласно критериям, включающим в себя отношение сигнал/шум и степень искажения;
(c) получение модели, отображающей геометрию съемки источник-приемник и среду для передачи электрического сигнала, причем упомянутая модель содержит три угла ориентации приемника, модель удельного сопротивления и электромагнитный источник (передатчик), и параметры приемника;
(d) получение решений уравнений Максвелла электромагнитного поля с модельными и выбранными данными съемки в качестве вводной информации и упомянутыми тремя углами ориентации в качестве неизвестных, причем упомянутое решение выполняется посредством итерационного численного обратного преобразования;
(e) использование трех углов ориентации для разложения данных измеренного электромагнитного поля на продольную, поперечную и вертикальную компоненты, причем линия направления относится к линии, содержащей последовательные положения источника; и
(f) добыча углеводородов из местоположений в упомянутом подземном пространстве, указанном аномалиями удельного сопротивления, обнаруженными в разложенных данных электромагнитного поля.

Текст
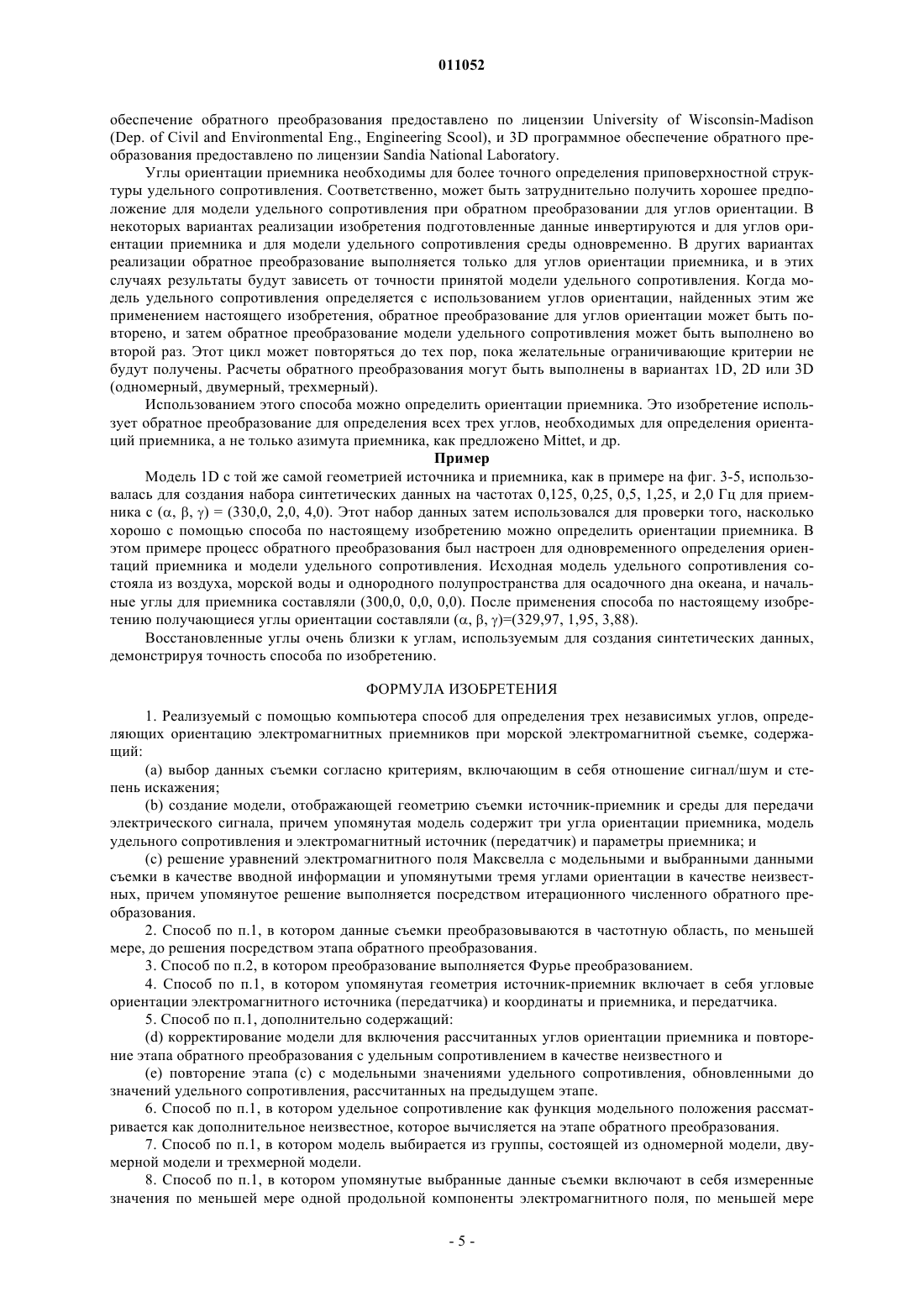
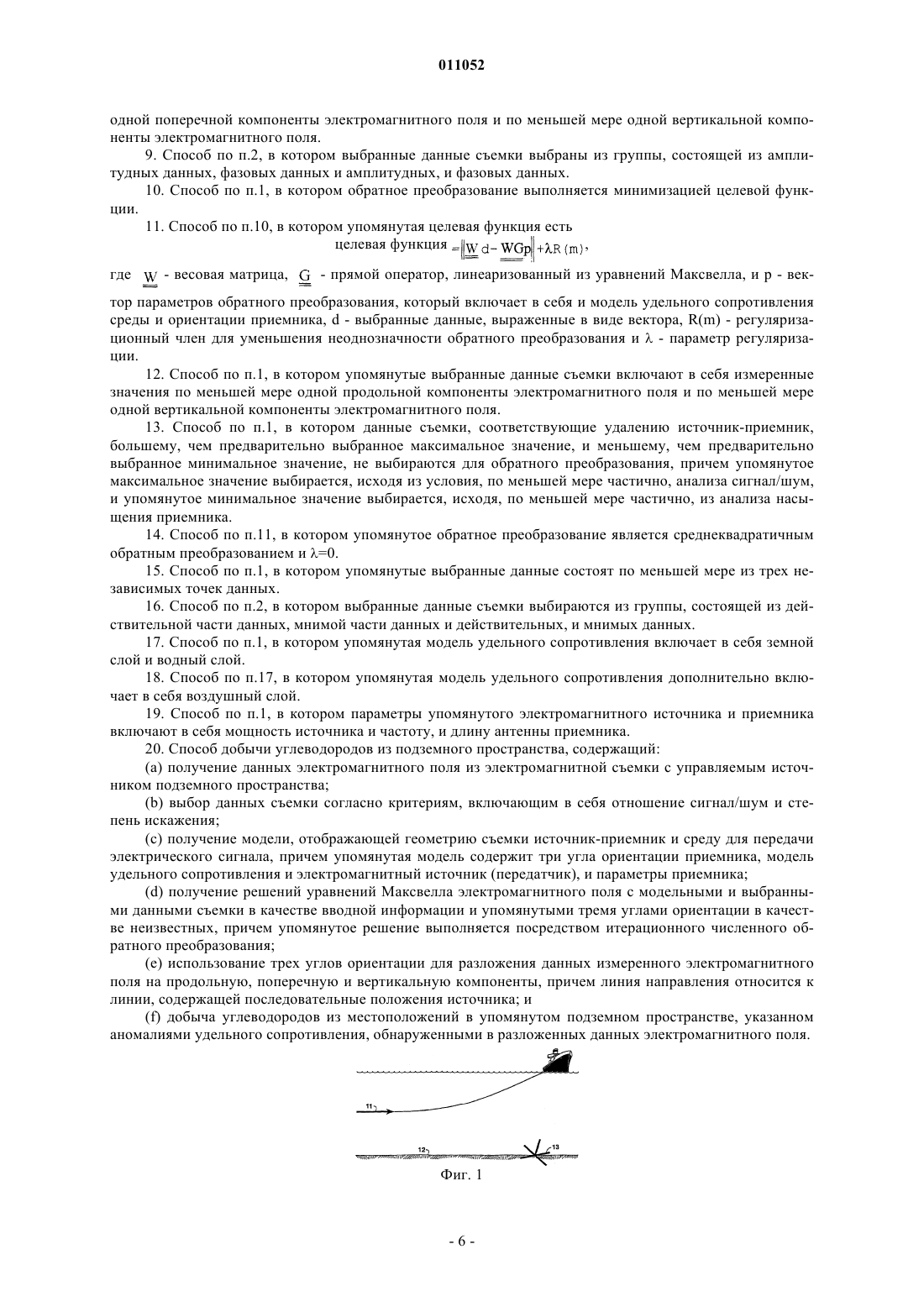
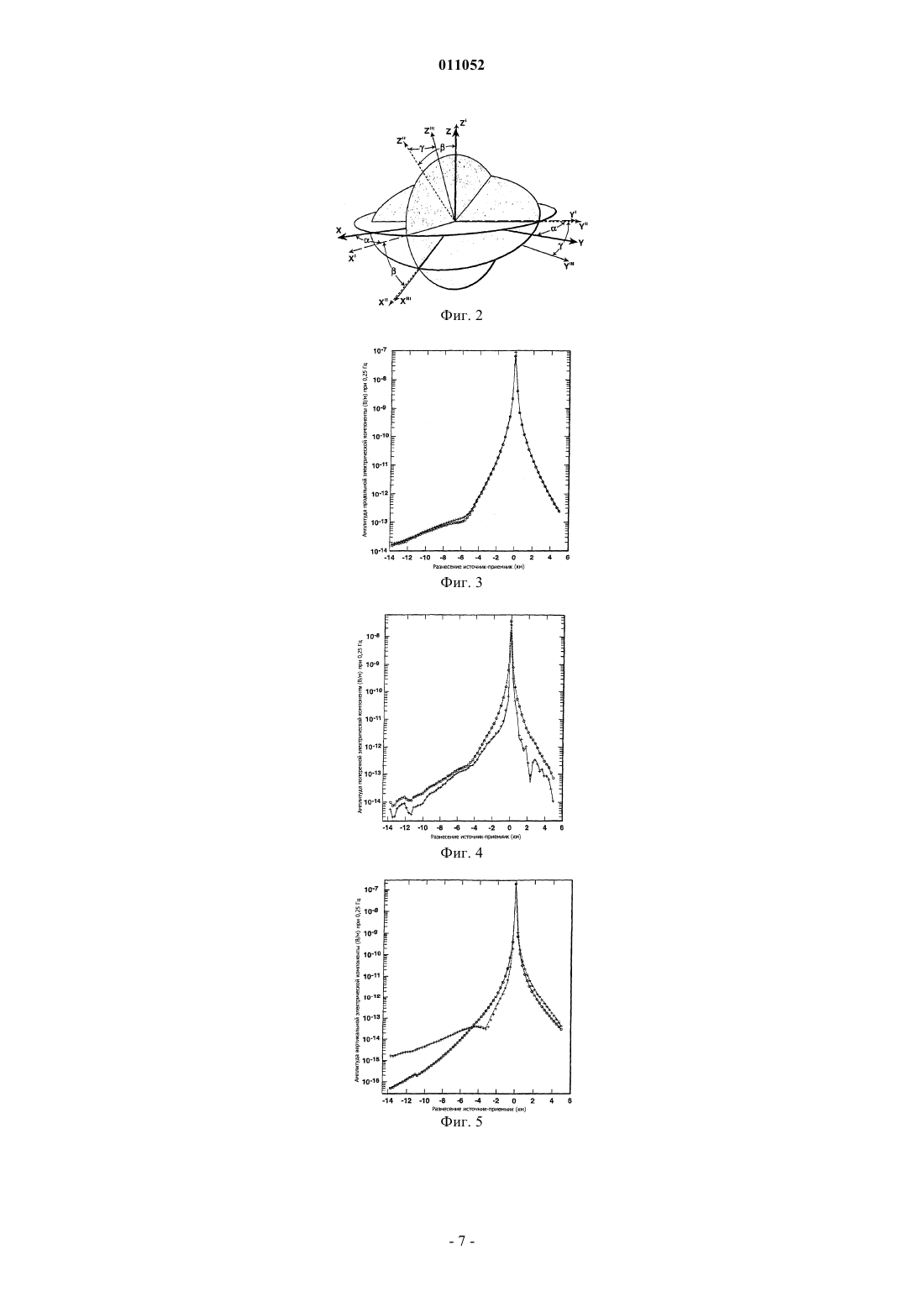
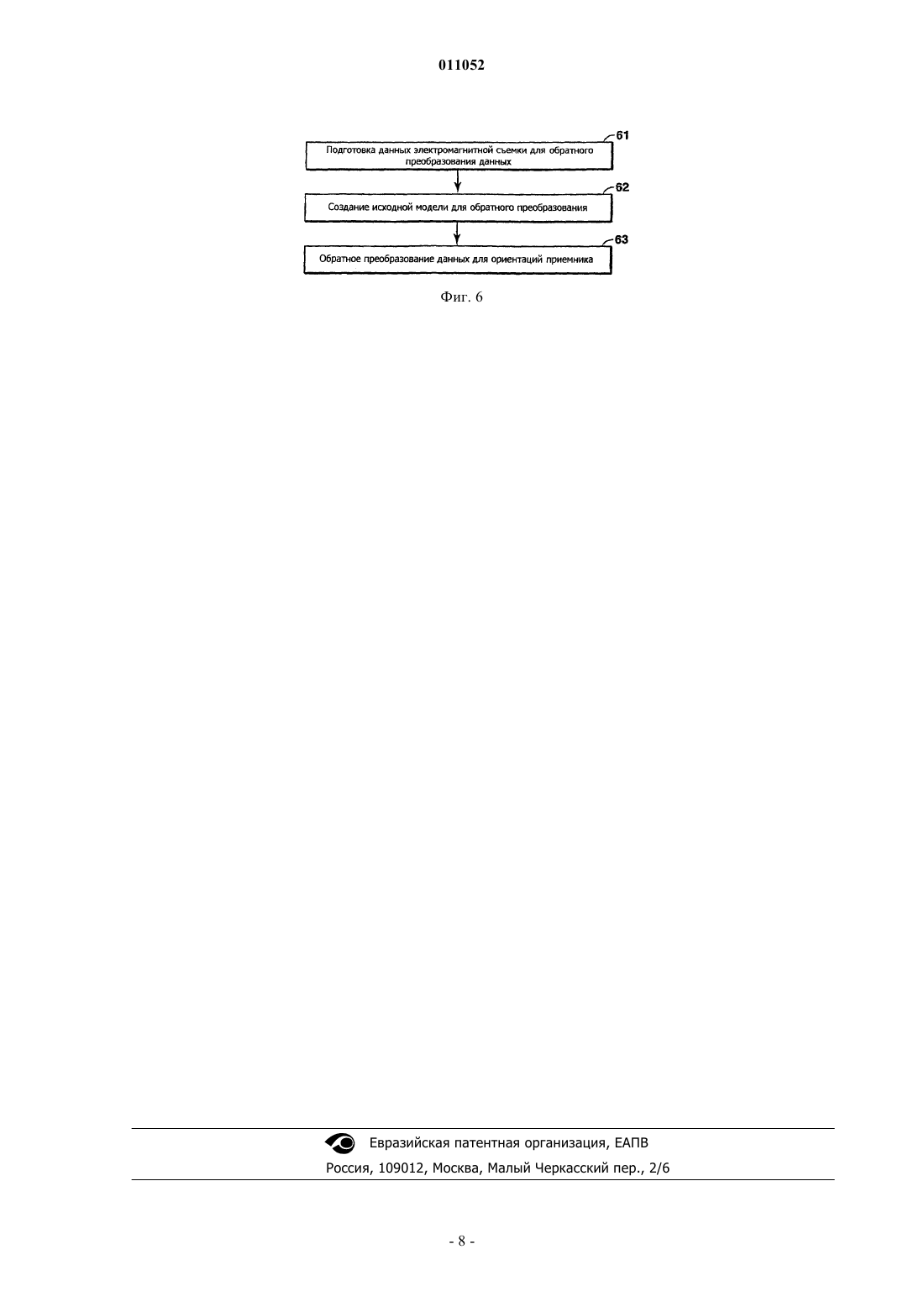
011052 Эта заявка испрашивает приоритет относительно предварительной заявки на патент США 60/701,817, поданной 22 июля 2005. Область техники, к которой относится изобретение Это изобретение относится, в общем случае, к геофизической разведке, включающей в себя выявление пластов-коллекторов, и, в частности, к электромагнитной съемке с управляемым источником для геофизических применений. В особенности, изобретение представляет собой способ для определения ориентаций электромагнитного приемника. Уровень техники Способ морской электромагнитной съемки с управляемым источником ("CSEM") предусматривает применение искусственных источников для получения электромагнитных (EM) волн и размещение приемников на дне океана для регистрации электромагнитных сигналов. Зарегистрированные электромагнитные сигналы анализируют для определения придонных структур и/или определения природы определенных структур, например, пластов-коллекторов. На фиг. 1 показано обычное развертывание оборудования CSEM с горизонтальным электрическим дипольным (HED) источником 11, буксируемым судном над водным дном 12, на котором расположены приемники 13. Эта технология применялась при разведке углеводородов и минералов, а также и в других областях, например, при тектонических исследованиях,природообустройстве и инженерной геологии. В настоящее время, приемники произвольно опускаются на дно океана и поэтому их ориентации неизвестны. Ориентации приемника требуются для определения трехмерных векторов EM поля, измеренных в местоположениях приемника. Измеренные поля затем разлагаются на компоненты в предпочтительных направлениях (например, по направлениям вдоль, поперек и вертикально) для анализа, обратного преобразования и интерпретации. Влияние на разложенные компоненты может быть значительным,если приемник не может быть сориентирован по этим предпочтительным направлениям из-за неточных ориентаций приемника. Поэтому определение ориентаций приемника может существенно влиять на интерпретацию данных. Настоящее изобретение предоставляет методику определения ориентации приемника. Для полного измерения трехмерного EM поля приемники должны быть оборудованы тремя взаимно-перпендикулярными антеннами для электрических полей и тремя взаимно-перпендикулярными магнитными датчиками для магнитных полей. Три угла необходимы и достаточны для однозначного определения ориентации приемника. Эти три угла устанавливают соотношения между измеренными координатами и координатами приемника. Можно использовать множество вариантов для определения ориентаций приемника по измеренным координатам. Они эквивалентны и могут быть преобразованы друг в друга. Один вариант определения ориентации приемника сводится к использованию азимута и наклонов для двух горизонтальных каналов (фиг. 2). На фиг. 2 предполагается, что (X, Y, Z) являются измеренными координатами с X, направленным на геодезический восток, Y - на геодезический север, и Z - вверх. Координаты (X'", Y'", Z'") представляют собой координаты приемника и введенные "восточный", "северный" и вертикальный каналы. (X', Y', Z') и (X", Y", Z") являются вспомогательными координатами для облегчения преобразования координат от (X, Y, Z) к (X'", Y'", Z'"). Координата X' является проекцией Х'" на горизонтальную плоскость XY, тогда как Y" является проекцией Y'". При таких установках азимутприемника определяется углом между Y и Y', наклон восточного каналапредставляет собой угол между X' и X"', наклон северного канала- угол между Y" и Y'". В настоящее время известно множество способов для определения ориентаций приемника. Среди них те, которыми непосредственно измеряют ориентации приемника. Существующие системы непосредственного измерения для морских CSEM приемников не достаточно надежны. Даже если такая система доступна, все же при некоторых обстоятельствах необходим альтернативный способ: например, 1) когда система непосредственного измерения выхсдит из строя; 2) когда система измерения не выровнена с направлениями на электроды/магнитные датчики из-за изгиба протяженных электрических антенн на дне океана. Другой способ - это поляризационный анализ, представленный в работе J.P.Behrens, (2005), "ThePEGASUS experiment", Journal of Geophysical Research, 101, 5519-5530 (1996). Способ основан на том,что амплитуда EM поля сигнала, зарегистрированного приемником, становится максимальной, если антенна приемника направлена на передатчик (то есть главная ось эллипса поляризации) при буксировке передатчика непосредственно по направлению к приемнику. Поляризационный анализ был основным способом, используемым в предшествующих применениях морской CSEM для определения азимута приемника при последующей обработке данных. Способ предусматривает наличие по меньшей мере одного буксирного троса, буксируемого непосредственно над приемником. Точность определения азимута приемника, обеспечиваемая этим способом, не очень высока. Средняя ошибка в определении азимутов приемника составляет более, чем 5 для полевых данных от судна с системой динамического позициони-1 011052 рования. Это может быть хуже для судна без системы динамического позиционирования в трудных метеорологических условиях.Behrens также предложил использовать когерентность и корреляцию в естественных EM сигналах,регистрируемых различными приемниками для определения относительного азимута. Этот способ был разработан для приемников без непосредственного буксирования буксирного троса, а как дополнение к анализу поляризации. Способ определяет относительный угол азимута между двумя приемниками. Для нахождения азимута приемника способ требует, чтобы был известен азимут опорного приемника. Успех в применении этого способа зависит от того, высокого ли качества регистрируются естественные сигналы обоими приемниками. Точность определения этим способом обычно оказывается ниже, чем посредством анализа поляризации.R. Mittet и др. использовали обратное преобразование для определения азимута приемника в "Е 020:Inversion of SBL data acquired in shallow waters", EAGE 66th ConferenceExhibition - Paris, France, June 710 (2004). Этот способ преодолевает ограничения и на поляризационный анализ и на способ использования естественных EM сигналов. Все эти три способа, хотя и широко используются, касаются только азимута приемника, но не предоставляют возможность однозначно определить ориентации приемника, то есть и азимут и углы наклона двух горизонтальных каналов. Причин для пренебрежения другими двумя углами наклона приемника по меньшей мере три. (1) Интерпретация данных главным образом сосредотачивается (и измерение данных может быть ограничено этим же) на продольном направлении (это означает вдоль направления буксировки) электрической компоненты, которая обычно не сильно подвержена влиянию углов наклона, если дно океана не слишком наклонное. (2) Вертикальная электрическая компонента или не измеряется или не полностью используется при интерпретации данных. (3) Никакой надежный и точный способ не является доступным для определения ориентаций приемника. Два наклона обычно малы (меньше 10, поскольку дно океана обычно плоское). Три три причины, очевидно, не полностью независимы друг от друга. В дополнение к отмеченным выше трем причинам, нельзя оценить степень возможного воздействия на результаты CSEM даже при малых углах наклона приемника. Влияние ориентаций приемника на три электрические компоненты моделировались для настоящего изобретения, что можно видеть на фиг. 3-5. Геометрия источника и приемника, использованная в модельных расчетах, представленных на этих трех фигурах, взята из реальной полевой съемки. Модель удельного сопротивления представляет собой слоистую модель среды с глубиной воды 125 м. Направление буксировки 265,57 от геодезического севера,по часовой стрелке. При моделированиях, для приемника (азимут,на фиг. 2) разориентацияс буксирным канатом (прямое направление) составляет 15, наклонантенны к этому направлению 5, и наклонпоперечного направления ниже 3. Модельная частота составляет 0,25 Гц. На каждой из этих трех фигур, сплошная линия отображает выровненный и находящийся на одном уровне приемник, кружки - находящийся на одном уровне приемник с =15, "+" символы - выровненный приемник с наклонами =5 и =-3, и пунктирная линия разориентированный и наклоненный приемник. По сравнению с идеальной ситуацией (находящийся на одном уровне приемник, выровненный с буксирным канатом, то есть, все три угла [,и ] равны нулю) эти чертежи показывают, что хотя азимут имеет намного большее влияние на два горизонтальных (продольный и поперечный) канала, чем на углы наклона (особенно на поперечную компоненту), наклоны имеют большее влияние на вертикальную компоненту Ez. Воздействия могут быть существенными, например около одного порядка по величине, для поперечных и вертикальных компонент этого примера (фиг. 4 и 5). Этот пример ясно демонстрирует важность определения всех трех углов. Азимут приемника, сам по себе, не может однозначно определить ориентации приемника, развернутого на дне океана. Таким образом, имеется потребность в методике определения ориентаций приемника, которые могут использоваться без каких-либо ограничений на геометрию передатчика и приемника. Настоящее изобретение удовлетворяет этой потребности. Сущность изобретения В одном варианте реализации изобретение представляет собой реализуемый с помощью компьютера способ для определения трех независимых углов, определяющих ориентацию электромагнитных приемников при морской электромагнитной съемке, содержащий: (а) выбор данных съемки согласно критериям, включающим в себя отношение сигнал/шум и степень искажения; (b) создание модели, отображающей геометрию съемки источник-приемник и среды для передачи электрического сигнала, причем упомянутая модель содержит три угла ориентации приемника, модель удельного сопротивления, и электромагнитные параметры источника (передатчика); и (с) решение уравнений электромагнитного поля Максвелла с модельными и выбранными данными съемки в качестве вводной информации и упомянутыми тремя углами ориентации в качестве неизвестных, причем упомянутое решение выполняется посредством итерационного численного обратного преобразования. Изобретение предпочтительно применяется в частотной области, когда данные съемки преобразуются в частотную область Фурье преобразованием (или другим способом) перед вышеупомянутым этапом выбора, или, по меньшей мере, перед этапом решения/обратного преобразования.-2 011052 Краткое описание чертежей Настоящее изобретение и его достоинства будут лучше поняты из следующего подробного описания и приложенных чертежей, на которых фиг. 1 изображает морскую CSEM съемку; фиг. 2 - набор из трех углов, связывающих ориентацию одной системы координат с другой; фиг. 3- влияние ориентации приемника на амплитуду продольной компоненты электрического поля; фиг. 4 - влияние ориентаций приемника на амплитуду поперечной компоненты электрического поля; фиг. 5 - влияние ориентаций приемника на амплитуду вертикальной компоненты электрического поля; и фиг. 6 - блок-схема последовательности операций в однсм варианте реализации настоящего способа по изобретению. Изобретение описывается в связи с его предпочтительными вариантами реализации. Однако поскольку следующее описание соответствует определенному варианту реализации или определенному варианту применения изобретения, то оно имеет лишь иллюстративный характер и не должно рассматриваться как ограничение пределов действия изобретения. Напротив, оно предполагает охват всех альтернативных вариантов, модификаций и эквивалентов, которые могут быть включены в пределах сущности и области применения изобретения, как это определено приложенной формулой. Подробное описание предпочтительных вариантов реализации Это изобретение представляет собой способ для определения ориентации электромагнитного приемника в морской CSEM съемке посредством обратного преобразования уравнений электромагнитного поля (уравнений Максвелла). Три угла ориентации рассматриваются как обратно преобразованные параметры, то есть неизвестные, для которых находится решение. Изобретение включает в себя три основных этапа, сведенные в блок-схеме последовательности операций на фиг. 6: (i) подготовка данных для обратного преобразования (этап 61); (ii) создание исходной модели (этап 62); и (iii) обратное преобразование данных для ориентаций приемника (этап 63). В данном случае обратное преобразование означает вывод х из измеренных данных y=F(x, u, v), где отыскание х может быть выполнено итерационным методом проб и ошибок с использованием численных методов, например, методом конечных разностей, для нахождения того решения, которое наилучшим образом соответствует данным при некотором выбранном критерии.(i) Подготовка данных для обратного преобразования. Вследствие известного скин-эффекта, EM сигналы затухают с расстоянием от источника (или передатчика) по экспоненте для данной частоты. Приемник не может регистрировать сигналы высокого качества из-за сопутствующих шумов, если источник находится далеко от приемника. Если источник находится слишком близко от приемника, то приемник насыщается из-за ограниченного динамического диапазона измерения. Таким образом, измеряемые сигналы оказываются искаженными. Для изобретения предпочтительно, чтобы данные отбирались при таксм промежуточном удалении источник-приемник,чтобы источник мог генерировать сигналы достаточно мощные в месте расположения приемника для хорошего отношения сигнал/шум, но и не настолько мощные, чтобы приводить к насыщению приемника. Кроме того, для отбираемых данных необходимы точные измерения геометрии источник-приемник. Термин "геометрия", конечно же, не включает в себя угловую ориентацию приемников; ясно, что этот специфический геометрический признак не может быть измерен с достаточной точностью. Термин включает в себя ориентации передатчика (например, азимут и наклон для HED источника) и координаты и приемника и передатчика. Даже при выбранных пределах удаления, данные могут не идеально подходить для обратного преобразования из-за таких эффектов, как нестабильность источника, электронные параметры конкретного приемника, временные изменения естественных EM сигналов и океанские волны. Пользователь настоящего изобретения может пожелать вручную выбрать данные для их использования, возможно с помощью диалогового программного обеспечения с показом данных, или в соответствии с опытом. При CSEM съемке, и амплитуда и фаза обычно получаются для каждой измеренной компонентыEM поля. Или амплитудные или фазовые данные, или и те и другие, могут использоваться для этапа обратного преобразования настоящего изобретения. Например, может быть так, что фазовые данные расцениваются как имеющие недостаточную точность, тогда только амплитуда оказывается предпочтительной для использования в обратном преобразовании. При наиболее благоприятной ситуации и амплитудные и фазовые данные электрического и магнитного поля, т.е. все шесть компонент, оказываются включенными в обратное преобразование. Некоторые данные вертикальной компоненты важны для определения наклонов. Предпочтительно, чтобы данные вертикальной компоненты составляли приблизительно одну треть от полных данных. Теоретически по меньшей мере три (независимых) точки данных необходимы для однозначного и достаточного определения трех углов приемника, в которых значение Ex (или амплитуда или фаза) для одного положения приемник/источник представляло бы собой пример отдельной точки данных. Практически, предпочтительно включаются максимально возможные данные для EM-3 011052 компонент из-за шума и различной чувствительности каждой компоненты к каждому из углов ориентации. Также предпочтительно, но все же не обязательно, включать максимально возможные частоты и комбинации источник-приемник. Получение большего количества данных оказывается и более дорогостоящим и требует большего компьютерного времени для обработки, но дает более точные результаты. Данные CSEM съемки измеряются во временной области. Настоящий способ по изобретению предпочтительно осуществляется в частотной области, и в этих вариантах реализации данные должны быть преобразованы в частотную область посредством преобразования Фурье или другими способами. Например, содержание частот волнового источника может быть известно, и в этом случае амплитудная и фазовая информация для определенной частоты может быть извлечена из измеренных данных методиками аппроксимации данных. В данном случае подходят все способы преобразования данных в частотную область. В частотной области данные становятся комплексными числами. Настоящий способ по изобретению может быть осуществлен с использованием только реальной части выбранных данных, или только мнимой части, или с использованием и того и другого. Аналогично, как указано выше, изобретение может быть реализовано только с амплитудными данными, или только с фазовыми данными, или и с теми и с другими.(ii) Создание исходной модели. Исходная модель, необходимая для обратного преобразования, включает в себя три угла ориентации приемника и модель удельного сопротивления. Электромагнитные параметры источника, например,мощность источника и частота, также должны быть включены в модель, так же как и любые необходимые (на этапе обратного преобразования) параметры приемника, например длина антенны приемника, и полевая геометрия источника и приемника (система сбора должна точно регистрировать геометрию). Эта исходная модель должна быть создана по возможности максимально реалистичной. Процесс обратного преобразования (рассматриваемый ниже) должен быть, конечно же, выполнен численными способами,начинаясь с первого предположения о трех углах ориентации приемника. При хорошем начальном предположении обратное преобразование быстро сходится, и можно избежать ошибки из-за локального минимума для обратного преобразования. Азимут приемника, определенный другими способами, например, из анализа поляризации, может использоваться в исходной модели. Наклон дна океана обычно не крут, и поэтому углы двух наклонов горизонтального канала могут считаться нулевыми в исходной модели. Модель удельного сопротивления может быть слоистой моделью, состоящей из воздуха, морской воды и осадочного дна океана. Удельное сопротивление морской воды изменяется с глубиной и часто измеряется для каждой области съемки. Эта измеренная колонка удельного сопротивления морской воды должна использоваться в исходной модели, если это возможно. В другом случае, колонка удельного сопротивления морской воды может быть оценена по эмпирической формуле; см., например, Chave et al, Electromagnetic Methods inApplied Geophysics, M. Nambighian, Ed., Society of Exploration Geophysicists, Vol.2, 932 (1991). Осадочное дно океана может быть просто полупространством, или быть составленным из множества слоев, или более сложной моделью с вводимыми данными от других измерений, например, из сейсмической съемки.(iii) Обратное преобразование данных для ориентаций приемника. Выбранные данные затем подвергаются обратному преобразованию для определения ориентаций приемника. Электромагнитные сигналы, зарегистрированные приемником, связаны с геометрией передатчика и приемника (и координаты и ориентации), так же, как и с удельным сопротивлением строения среды. Это соотношение (то есть прямая задача) может быть записано как d = F (m, rTX, оТХ, rRX, oRX) , гдеd - вектор измеренных данных, m - модельное удельное сопротивление среды, (rTX, оТХ, rRX, oRX - координаты и ориентации передатчика и приемника, и F - известное для полей EM из уравнений Максвелла,предоставляющее средство расчета d для любого модельного т и любой геометрии передатчика и приемника. Хорошо известно, что удельное сопротивление среды может быть восстановлено по CSEM измерениям при использовании соотношении, предоставляемых вышеупомянутым уравнением (Lu, и др. Geophys. J. Int. 138, 381-392 (1999. Этот процесс решения "прямого" уравнения для некоторых переменных,от которых зависит F, называется решением обратной задачи или просто обратным преобразованием. Данное изобретение использует процесс обратного преобразования для восстановления ориентации приемника. Этот процесс обратного преобразования может быть просто записан как: минимизация целевой функцииF, р - вектор параметров обратного преобразования, который включает в себя и модель удельного сопротивления среды и ориентации приемника, R(m) член регуляризации для уменьшения неоднозначности обратного преобразования, и- параметр регуляризации. Приемлемые ответы могут быть получены,однако, с равным нулю членом регуляризации и использованием схемы итераций по методу наименьших квадратов. Задача обратного преобразования и ее решения широко исследовались. См., например,R.L.Parker, Geophysical Inverse Theory, Princeton University Press, Princeton, New Jersey (1994); W.Menke,Geophysical Data Analysis: Discrete Inverse Theory, Academic Press, San Diego, California (1989); иA.Tarantola, Inverse Problem Theory, Methods for Data Fitting and Model Parameter Estimation, Elsevier, Amsterdam, The Netherlands (1987). При разработке настоящего способа по изобретению, 1D программное-4 011052 обеспечение обратного преобразования предоставлено по лицензии University of Wisconsin-Madison(Dep. of Civil and Environmental Eng., Engineering Scool), и 3D программное обеспечение обратного преобразования предоставлено по лицензии Sandia National Laboratory. Углы ориентации приемника необходимы для более точного определения приповерхностной структуры удельного сопротивления. Соответственно, может быть затруднительно получить хорошее предположение для модели удельного сопротивления при обратном преобразовании для углов ориентации. В некоторых вариантах реализации изобретения подготовленные данные инвертируются и для углов ориентации приемника и для модели удельного сопротивления среды одновременно. В других вариантах реализации обратное преобразование выполняется только для углов ориентации приемника, и в этих случаях результаты будут зависеть от точности принятой модели удельного сопротивления. Когда модель удельного сопротивления определяется с использованием углов ориентации, найденных этим же применением настоящего изобретения, обратное преобразование для углов ориентации может быть повторено, и затем обратное преобразование модели удельного сопротивления может быть выполнено во второй раз. Этот цикл может повторяться до тех пор, пока желательные ограничивающие критерии не будут получены. Расчеты обратного преобразования могут быть выполнены в вариантах 1D, 2D или 3D(одномерный, двумерный, трехмерный). Использованием этого способа можно определить ориентации приемника. Это изобретение использует обратное преобразование для определения всех трех углов, необходимых для определения ориентаций приемника, а не только азимута приемника, как предложено Mittet, и др. Пример Модель 1D с той же самой геометрией источника и приемника, как в примере на фиг. 3-5, использовалась для создания набора синтетических данных на частотах 0,125, 0,25, 0,5, 1,25, и 2,0 Гц для приемника с (, , ) = (330,0, 2,0, 4,0). Этот набор данных затем использовался для проверки того, насколько хорошо с помощью способа по настоящему изобретению можно определить ориентации приемника. В этом примере процесс обратного преобразования был настроен для одновременного определения ориентаций приемника и модели удельного сопротивления. Исходная модель удельного сопротивления состояла из воздуха, морской воды и однородного полупространства для осадочного дна океана, и начальные углы для приемника составляли (300,0, 0,0, 0,0). После применения способа по настоящему изобретению получающиеся углы ориентации составляли (, , )=(329,97, 1,95, 3,88). Восстановленные углы очень близки к углам, используемым для создания синтетических данных,демонстрируя точность способа по изобретению. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Реализуемый с помощью компьютера способ для определения трех независимых углов, определяющих ориентацию электромагнитных приемников при морской электромагнитной съемке, содержащий:(a) выбор данных съемки согласно критериям, включающим в себя отношение сигнал/шум и степень искажения;(b) создание модели, отображающей геометрию съемки источник-приемник и среды для передачи электрического сигнала, причем упомянутая модель содержит три угла ориентации приемника, модель удельного сопротивления и электромагнитный источник (передатчик) и параметры приемника; и(c) решение уравнений электромагнитного поля Максвелла с модельными и выбранными данными съемки в качестве вводной информации и упомянутыми тремя углами ориентации в качестве неизвестных, причем упомянутое решение выполняется посредством итерационного численного обратного преобразования. 2. Способ по п.1, в котором данные съемки преобразовываются в частотную область, по меньшей мере, до решения посредством этапа обратного преобразования. 3. Способ по п.2, в котором преобразование выполняется Фурье преобразованием. 4. Способ по п.1, в котором упомянутая геометрия источник-приемник включает в себя угловые ориентации электромагнитного источника (передатчика) и координаты и приемника, и передатчика. 5. Способ по п.1, дополнительно содержащий:(d) корректирование модели для включения рассчитанных углов ориентации приемника и повторение этапа обратного преобразования с удельным сопротивлением в качестве неизвестного и(е) повторение этапа (с) с модельными значениями удельного сопротивления, обновленными до значений удельного сопротивления, рассчитанных на предыдущем этапе. 6. Способ по п.1, в котором удельное сопротивление как функция модельного положения рассматривается как дополнительное неизвестное, которое вычисляется на этапе обратного преобразования. 7. Способ по п.1, в котором модель выбирается из группы, состоящей из одномерной модели, двумерной модели и трехмерной модели. 8. Способ по п.1, в котором упомянутые выбранные данные съемки включают в себя измеренные значения по меньшей мере одной продольной компоненты электромагнитного поля, по меньшей мере-5 011052 одной поперечной компоненты электромагнитного поля и по меньшей мере одной вертикальной компоненты электромагнитного поля. 9. Способ по п.2, в котором выбранные данные съемки выбраны из группы, состоящей из амплитудных данных, фазовых данных и амплитудных, и фазовых данных. 10. Способ по п.1, в котором обратное преобразование выполняется минимизацией целевой функции. 11. Способ по п.10, в котором упомянутая целевая функция есть- прямой оператор, линеаризованный из уравнений Максвелла, и р - век тор параметров обратного преобразования, который включает в себя и модель удельного сопротивления среды и ориентации приемника, d - выбранные данные, выраженные в виде вектора, R(m) - регуляризационный член для уменьшения неоднозначности обратного преобразования и- параметр регуляризации. 12. Способ по п.1, в котором упомянутые выбранные данные съемки включают в себя измеренные значения по меньшей мере одной продольной компоненты электромагнитного поля и по меньшей мере одной вертикальной компоненты электромагнитного поля. 13. Способ по п.1, в котором данные съемки, соответствующие удалению источник-приемник,большему, чем предварительно выбранное максимальное значение, и меньшему, чем предварительно выбранное минимальное значение, не выбираются для обратного преобразования, причем упомянутое максимальное значение выбирается, исходя из условия, по меньшей мере частично, анализа сигнал/шум,и упомянутое минимальное значение выбирается, исходя, по меньшей мере частично, из анализа насыщения приемника. 14. Способ по п.11, в котором упомянутое обратное преобразование является среднеквадратичным обратным преобразованием и =0. 15. Способ по п.1, в котором упомянутые выбранные данные состоят по меньшей мере из трех независимых точек данных. 16. Способ по п.2, в котором выбранные данные съемки выбираются из группы, состоящей из действительной части данных, мнимой части данных и действительных, и мнимых данных. 17. Способ по п.1, в котором упомянутая модель удельного сопротивления включает в себя земной слой и водный слой. 18. Способ по п.17, в котором упомянутая модель удельного сопротивления дополнительно включает в себя воздушный слой. 19. Способ по п.1, в котором параметры упомянутого электромагнитного источника и приемника включают в себя мощность источника и частоту, и длину антенны приемника. 20. Способ добычи углеводородов из подземного пространства, содержащий:(a) получение данных электромагнитного поля из электромагнитной съемки с управляемым источником подземного пространства;(b) выбор данных съемки согласно критериям, включающим в себя отношение сигнал/шум и степень искажения;(c) получение модели, отображающей геометрию съемки источник-приемник и среду для передачи электрического сигнала, причем упомянутая модель содержит три угла ориентации приемника, модель удельного сопротивления и электромагнитный источник (передатчик), и параметры приемника;(d) получение решений уравнений Максвелла электромагнитного поля с модельными и выбранными данными съемки в качестве вводной информации и упомянутыми тремя углами ориентации в качестве неизвестных, причем упомянутое решение выполняется посредством итерационного численного обратного преобразования;(e) использование трех углов ориентации для разложения данных измеренного электромагнитного поля на продольную, поперечную и вертикальную компоненты, причем линия направления относится к линии, содержащей последовательные положения источника; и(f) добыча углеводородов из местоположений в упомянутом подземном пространстве, указанном аномалиями удельного сопротивления, обнаруженными в разложенных данных электромагнитного поля.
МПК / Метки
МПК: G06F 19/00, G01V 3/08
Метки: способ, приемника, определения, ориентаций
Код ссылки
<a href="https://eas.patents.su/9-11052-sposob-dlya-opredeleniya-orientacijj-priemnika.html" rel="bookmark" title="База патентов Евразийского Союза">Способ для определения ориентаций приемника</a>
Механизм согласования приемника с модулем защиты
Номер патента: 2703
Опубликовано: 29.08.2002
Авторы: Сасселли Марко, Кюдельски Андре
МПК: H04N 7/16
Метки: модулем, согласования, приемника, защиты, механизм
Формула / Реферат:
1. Система приема платного телевидения, содержащая приемник (А), подсоединенный к средствам (С, D, F) защиты, причем указанный приемник (А) получает информацию дескремблирования от средств (С, D, F) защиты, отличающаяся тем, что, по меньшей мере, часть информации (4, 6), передаваемой от средств (С, D, F) защиты к приемнику (А), закодирована с помощью уникального для приемника (А) ключа шифрования. 2. Система приема платного телевидения по п.1,...
Способ для определения вертикальной электрической анизотропии земли в морских электромагнитных исследованиях
Номер патента: 10950
Опубликовано: 30.12.2008
Авторы: Бюрс Оливье М., Лу Синю, Срнка Леонард Дж.
МПК: G06F 19/00, G01V 3/18
Метки: земли, способ, вертикальной, электрической, исследованиях, морских, электромагнитных, определения, анизотропии
Формула / Реферат:
1. Реализуемый посредством компьютера способ для определения вертикальной анизотропии земли на основании электромагнитного исследования находящейся под поверхностью области, расположенной ниже водяной подушки в морском окружении, причем упомянутое исследование использует электромагнитный источник и множество электромагнитных приемников, причем упомянутый способ содержит этапы, на которых: (a) из результатов исследования получают данные...
Установление соединения с использованием гибридного приемника
Номер патента: 9019
Опубликовано: 26.10.2007
Авторы: Ким Дук Сан, Шираи Казухико, Юки Сатору, Квон Майк
МПК: H04M 3/42, H04L 12/64
Метки: гибридного, установление, использованием, приемника, соединения
Формула / Реферат:
1. Способ установления соединения с гибридным приемником, содержащий передачу запроса на соединение в первую сеть связи в соответствии с первым протоколом связи, при этом запрос на соединение включает информацию об адресе передатчика для установления соединения с использованием второго протокола связи; и прием ответного сообщения о соединении из второй сети связи в соответствии со вторым протоколом связи и информацией об адресе передатчика. 2....
Способ определения параметра в физической системе
Номер патента: 940
Опубликовано: 26.06.2000
Авторы: Кулман Йоханнес Мария Вианней Антониус, Сандор Роберт Карл Йосеф, Де Кюэйпер Андре
МПК: G01V 3/38, G01N 33/24
Метки: физической, определения, способ, параметра, системе
Формула / Реферат:
1. Способ определения параметра физической модели, представляющей электрические характеристики земного пласта, заключающийся в том, что проводят каротажные измерения множества электрических свойств земного пласта, включая первое электрическое свойство и множество физических переменных земного пласта, определяют указанную модель в виде зависимости между, по меньшей мере, одним электрическим свойством земного пласта, множеством физических...
Система для проведения комбинированных поверхностных и скважинных электромагнитных измерений и способ определения свойств пластовых флюидов
Номер патента: 8162
Опубликовано: 27.04.2007
Автор: Страк Курт Мартин
Метки: свойств, комбинированных, система, электромагнитных, определения, способ, флюидов, пластовых, скважинных, измерений, проведения, поверхностных
Формула / Реферат:
1. Способ мониторинга пластового резервуара, включающий выполнение первой совокупности электромагнитных измерений в местах, расположенных на поверхности земли; выполнение первого измерения по меньшей мере одним датчиком, расположенным в скважине вблизи пластового резервуара; определение начальной модели геологической среды на основе первой совокупности электромагнитных измерений и первого измерения датчика, причем начальная модель геологической...
Предыдущий патент: Композиционная мембрана из палладия или сплава палладия и способ её изготовления
Следующий патент: Способ определения веса груза, несомого подъемником подъемного устройства, и взвешивающее устройство
Случайный патент: Способ и система завершения скважины с использованием стояка для ремонта