Способ контроля сейсмических явлений
Формула / Реферат
1. Способ пассивного контроля подземного местоположения, заключающийся в том, что получают многокомпонентные сигналы микросейсмической волны в пределах местоположения и осуществляют инверсию (обратное преобразование) формы волны, для чего минимизируют несоответствие между синтетическими сейсмограммами и сигналами для определения параметров, представляющих собой характеристики источника указанной микросейсмической волны, при этом параметрами, представляющими собой характеристики источника микросейсмической волны, являются тензор моментов, или местоположение источника, или начальный момент времени.
2. Способ по п.1, отличающийся тем, что запись сигналов осуществляют, по меньшей мере, для определения характеристик источника, которые фильтруют на нижних частотах или ограничивают по полосе в частотном диапазоне от 0 до 100 Гц.
3. Способ по п.1, отличающийся тем, что микросейсмическую волну вызывают в скважине посредством операции гидравлического разрыва пласта.
4. Способ по п.1, отличающийся тем, что осуществляют оценку функции Грина для выделения характеристик источника из полученных сигналов.
5. Способ по п.1, отличающийся тем, что полученные сигналы обрабатывают для идентификации вступлений Р-волны или S-волны до инверсии волнового поля.
6. Способ по п.1, отличающийся тем, что дополнительно используют разложение одиночных значений для стабилизации инверсии формы волны.
7. Способ по п.1, отличающийся тем, что осуществляют минимизацию разности между полученными сигналами и синтетическими сигналами.
8. Способ по п.1, отличающийся тем, что осуществляют минимизацию разности между полученными сигналами и синтетическими сигналами, при этом синтетические сигналы зависят от оцененных характеристик источника.
9. Способ по п.8, отличающийся тем, что на шаге минимизации разности между полученными сигналами и синтетическими сигналами осуществляют поиск по местоположениям источника и начальным моментам времени для оцененных характеристик источника.
10. Способ по п.8, отличающийся тем, что на шаге минимизации разности между полученными сигналами и синтетическими сигналами осуществляют поиск на сетке (синтетических профилей) по местоположениям источника, начальным моментам времени для оцененных характеристик источника.
11. Способ по п.10, отличающийся тем, что дополнительно осуществляют следующие шаги:
оценивают исходный начальный момент времени на возможных местах расположения источника,
осуществляют поиск вокруг оцененного начального момента времени для каждого местоположения источника,
для указанных начальных моментов времени определяют единственное решение тензора моментов источника,
оценивают методом наименьших квадратов несоответствие между зарегистрированными сигналами и синтетическими сигналами, полученными путем вычисления сигналов, вызванных источником указанного тензора моментов в местах нахождения приемников,
сохраняют наилучшее полученное решение для каждого местоположения источника.
12. Способ по п.1, отличающийся тем, что функцию времени разрыва источника аппроксимируют дельта-функцией.
Текст
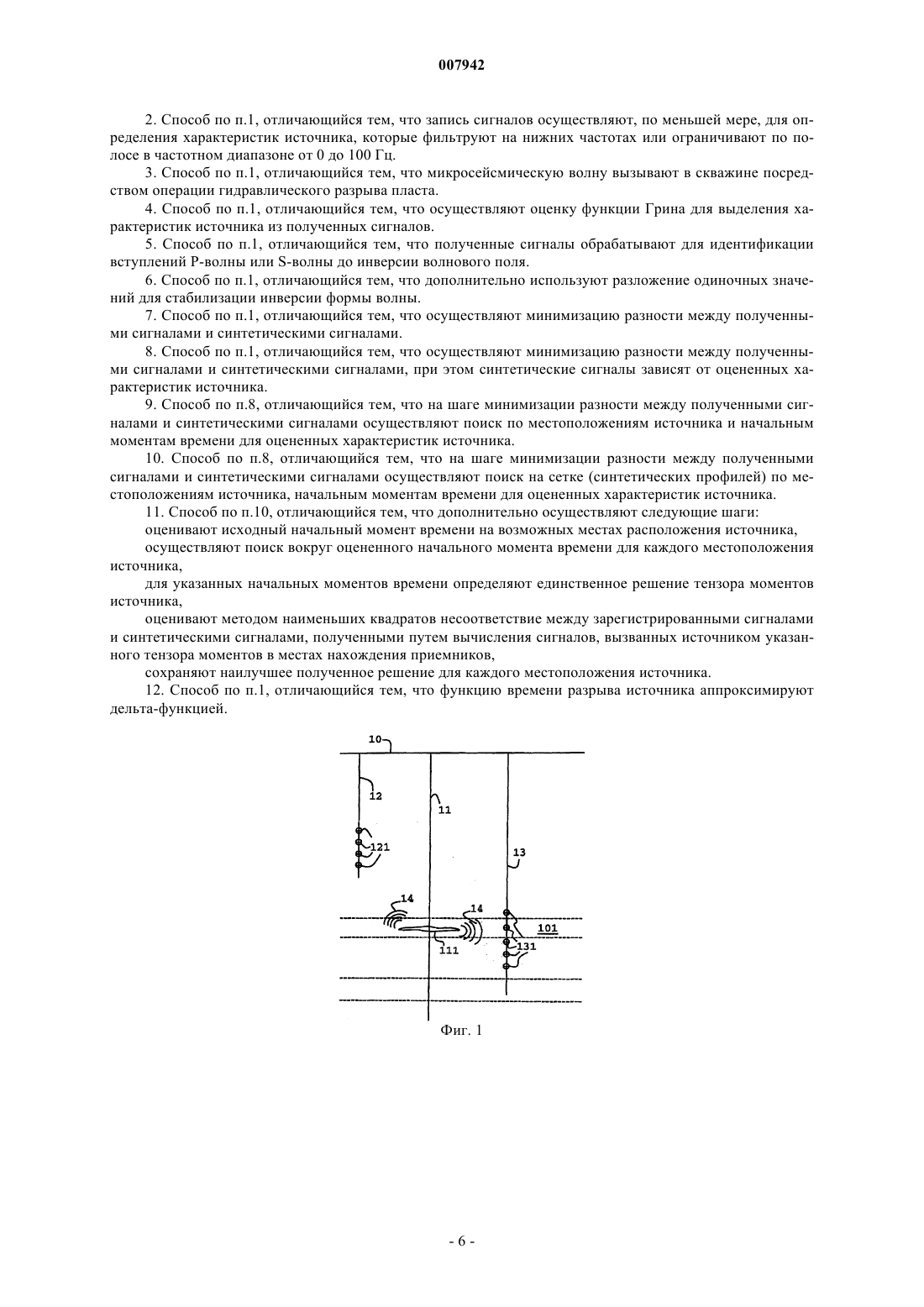
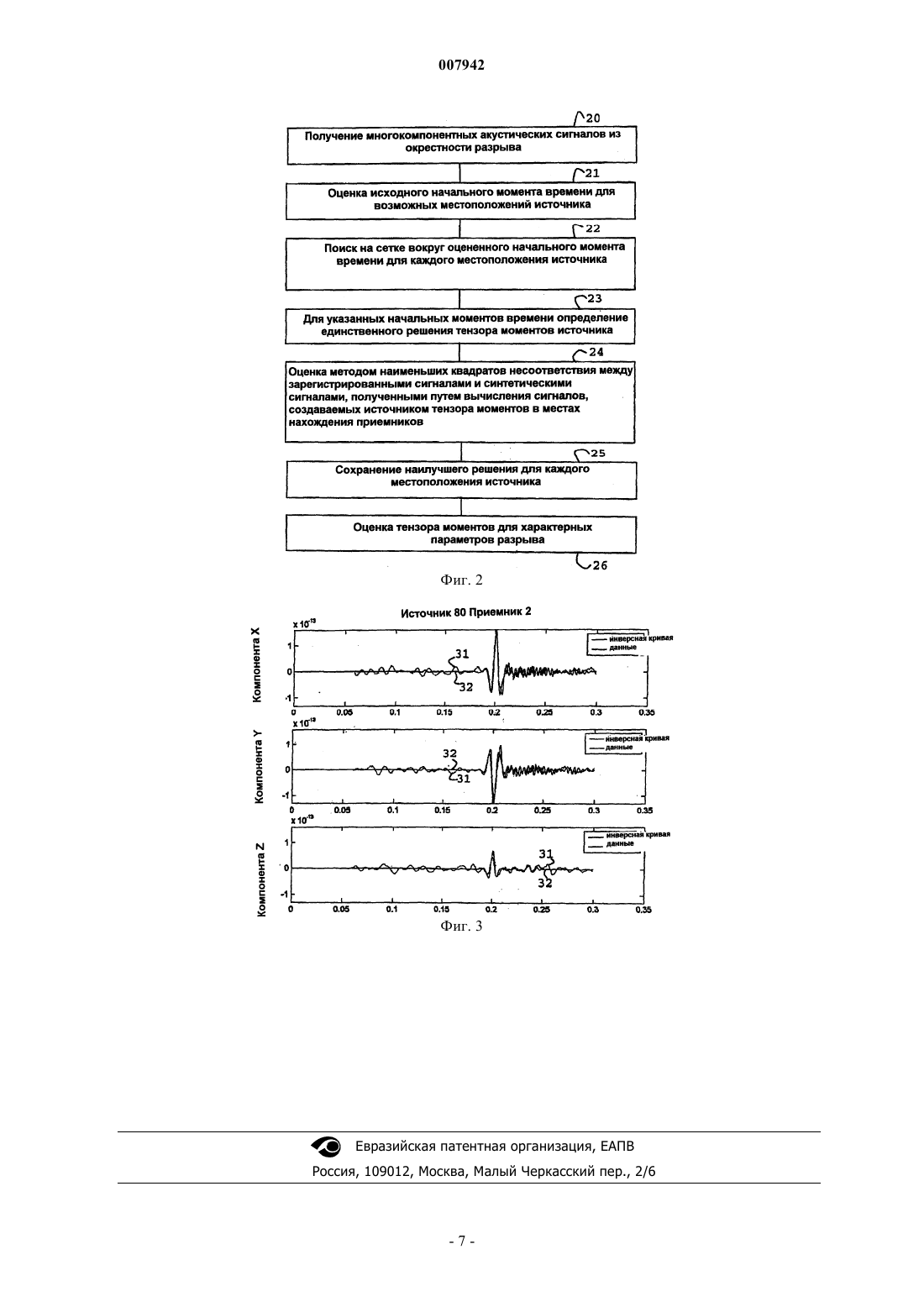
007942 Область техники Настоящее изобретение относится к способам сбора сейсмических данных пассивно контролируемых сейсмических явлений, таких как акустические сигналы, создаваемые при добыче углеводородов из продуктивного пласта или коллектора или при гидравлическом воздействии, например при гидравлическом разрыве слоев породы, для повышения добычи углеводородов из скважины или из продуктивного пласта. Более конкретно, изобретение относится к таким способам, в которых используют сейсмические методы для определения характеристик источников и местоположения таких явлений. Предшествующий уровень техники Сейсмический контроль известен как способ, который применительно к исследуемому горизонту обеспечивает намного более глубокое проникновение в коллектор углеводородов, чем другие способы,используемые в нефтегазодобывающей промышленности. Предлагалось использовать достижения сейсмических методов для контроля продуктивности пласта. При обычном сейсмическом контроле приводят в действие сейсмический источник, такой как воздушные пушки, вибраторы или заряды взрывчатого вещества, посредством которых создают энергию акустических волн, достаточную для проникновения волн в грунт. Отраженные или преломленные части этих волн затем регистрируют с помощью сейсмических приемников, таких как гидрофоны и геофоны. При пассивном сейсмическом контроле отсутствует активно управляемый или запускаемый источник. Энергия сейсмических волн создается в течение так называемых микросейсмических явлений, вызываемых подземными смещениями и изменениями, которые приводят, по меньшей мере, к частичному возрастанию акустических волн, которые, в свою очередь, могут быть зарегистрированы путем использования известных приемников. Кроме задачи обнаружения часто слабых сейсмических явлений, требуется их интерпретация, и эта задача является трудной, поскольку априори не известны ни местоположение источника, ни сигнатура(форма волны на сейсмограмме), ни характеристики источника. Однако сведения об этих параметрах являются важными для установления дополнительных параметров продуктивного пласта, которые позволяют улучшить контроль продуктивности пласта. Из предшествующего уровня техники известны патенты США: 4516206, 5377104, 5996726, а также статья Rutledge и др. Hydraulic stimulation of natural fractures as revealed by induced microearthquakes, Carthage Cotton Valley gas field, east Texas в журнале Геофизика, т. 68,2, 2003 г., стр. 441-452. Указанные патенты относятся к обнаружению пассивных сейсмических или микросейсмических событий. В предшествующем уровне техники характеристики источника, которые описывают влияние микросейсмических событий, определяются путем анализа амплитуды, фазы и времен прибытия Р-волн и S-волн. Специфической областью применения пассивного сейсмического контроля является контроль гидравлического разрыва пласта. Для повышения добычи или при использовании пластовых резервуаров для хранения работники нефтегазодобывающей промышленности выполняют процедуру, известную как гидравлический разрыв пласта. Например, операцию гидравлического разрыва обычно применяют к пластам, когда нефть или газ нельзя легко или экономно извлечь из земли. Такая операция гидравлического разрыва пласта включает нагнетание большого количества жидкости для создания в грунте трещин, при этом образуются пути, по которым могут протекать нефть и газ. Обычно после образования трещины в трещину добавляют песок или другой материал, так что, когда грунт снова смыкается после сброса давления, песок обеспечивает удержание грунта разделенным на части. Кроме того, песок обеспечивает путь для прохождения нефти и газа, чтобы они вытекали из образованного разрыва. Однако процесс гидравлического разрыва пласта не всегда работает очень хорошо. Причины этого вообще-то неизвестны. В дополнение к этому гидравлические разрывы пласта нельзя легко наблюдать,поскольку обычно они находятся на глубине тысяч футов ниже поверхности земли. Поэтому работники нефтегазодобывающей промышленности пытаются найти способы диагностики для определения, где находятся разрывы, насколько разрывы являются большими, как далеко они проходят и как они растут. Следовательно, необходимы диагностическая аппаратура и способ измерения гидравлического разрыва пласта и деформации породы вокруг пласта. Предпринимались попытки решить эту задачу, например, были разработаны способы картирования разрывов. Один из этих способов включает в себя сейсмические измерения. При сейсмических измерениях микромасштабные землетрясения, создаваемые гидравлическим разрывом пласта, анализируют с помощью сейсмических измерительных приборов, например акселерометров. Последнее исследование относительно использования микросейсмической визуализации при стимулировании гидравлического разрыва пласта представлено в работе Rutledge J.Т. и Phillips W.S. В обычных рабочих условиях (показаны более подробно ниже) для контроля скважины во время гидравлического разрыва пласта использовали трехкомпонентные геофоны (фиг. 1). Затем записи с геофонов преобразовывали во времена вступлений, а используя итерационный метод наименьших квадратов, - в местоположение источника. Краткое изложение существа изобретения Задачей настоящего изобретения является увеличение количества информации, извлекаемой из микросейсмического изображения продуктивного пласта, в частности при выполнении операций гидравлического разрыва пласта.-1 007942 Поставленная задача решена путем создания способа обработки пассивных сейсмических явлений,содержащих микросейсмические волны, или гидравлический разрыв пласта, для определения характеристик источника, начального момента времени или местоположения источника этих явлений путем инверсии формы волны. В противоположность известным способам способ согласно настоящему изобретению может быть применен к регистрируемой форме волны и для этого не требуются, например, определения специфических сейсмических фаз (таких как Р- или S-волны) или других параметров, получаемых из данных, например, углов поляризации. Полную форму волны и данные регистрируют, используя трехкомпонентные геофоны. Предпочтительно осуществлять фильтрацию нижних частот или полосовую фильтрацию полученных сигналов в диапазоне частот до 100 Гц и ниже или более предпочтительно до 50 Гц и ниже. Алгоритм пригоден для инверсии произвольной неоднородной среды, и в нем используется качественная модель скорости и плотности, если она имеется в наличии. Альтернативная версия алгоритма инверсии (в которой местоположение или начальный момент времени сейсмического источника определены независимо) может быть использована для обращения характеристик или только механизма действия источника. Предпочтительной характеристикой источника является его тензор моментов. В алгоритме предпочтительно использован принцип взаимности источника и приемников путем оценки функций Грина для произвольной гетерогенной среды из местоположений приемников. Затем эти функции Грина инвертируют для оценки синтетических сейсмограмм, являющихся следствием произвольного действия механизма источника из его местоположений. Используя алгоритмы поиска, известные как поиск на сетке сейсмических профилей по всем возможным местоположениям источника и начальным моментам времени, приводят в соответствие с данными методом наименьших квадратов синтетические сейсмограммы полных форм волн. Первоначальную оценку начального момента времени определяют путем взаимной корреляции данных и синтетических сигналов, являющихся следствием произвольного механизма действия источника. Инвертированный начальный момент времени определяют с помощью поиска на сетке сейсмических профилей вокруг этой первоначальной оценки. Алгоритм является устойчивым к белому шуму, добавленному к синтетическим сейсмограммам, и является устойчивым и особенно пригодным в случае низкочастотных данных в полосе частот от 0 до 100 Гц, более предпочтительно от 0 до 50 Гц. Краткое описание чертежей Ниже изобретение поясняется описанием предпочтительных вариантов его воплощения со ссылками на сопровождающие чертежи, на которых фиг. 1 изображает схему операции гидравлического разрыва пласта согласно изобретению; фиг. 2 - блок-схему последовательности операций способа пассивного контроля сейсмических явлений согласно изобретению; фиг. 3 - диаграмму сопоставления синтетических данных и данных, полученных заявленным способом согласно изобретению. Описание предпочтительных вариантов воплощения изобретения На фиг. 1 представлена схема гидравлического разрыва пласта вместе с технологической скважиной 11 и группами 121, 131 геофонов, расположенных в соседних скважинах 12, 13. Для гидравлического разрыва пласта в скважину 11 с поверхности 10 закачивают жидкость, вызывая гидравлический разрыв окружающего пласта в слое 101, содержащем углеводороды. Акустические волны 14, порожденные разрывом 111, распространяются через грунт и регистрируются с помощью трехкомпонентных геофонов двух групп 121, 131. Согласно настоящему изобретению предполагается, что во время акустического излучения регистрируются три компоненты временной зависимости скорости частиц (или смещения частиц) на нескольких (Nr) скважинных приемниках. Кроме того, предполагается существование скоростной модели (произвольной сложности) объема грунта, через который проходят сейсмические волны. Качество скоростной модели можно охарактеризовать длиной временного интервала Ti (i=1Nr), для которого один является доверительным интервалом, синтетических сейсмограмм, его можно привести в соответствие данным. Предпочтительно, чтобы эти временные интервалы включали в себя, по меньшей мере, вступление S-волны на все приемники. Использование смещения частиц является предпочтительным, поскольку при этом стабилизируется инверсия, так как скорость частиц более подвержена осцилляциям,чем смещение частиц. Для нахождения релевантных параметров источника, таких как вектор xs местоположения, начальный момент t0 времени и тензор М моментов, минимизируют несоответствие между синтетическими сейсмограммами и данными. При такой инверсии несоответствие определяется уравнением (1) где dj обозначает компоненту скорости частиц, зарегистрированную на i приемнике;Uj - j компонента синтетической сейсмограммы на i приемнике, т.к. источник расположен в xs,характеризующимся тензором М моментов.-2 007942 В обозначении символов черта обозначает нижний индекс. Параметры источника, при которых минимизируется уравнение (1), содержат инвертированное решение. Компоненту j синтетической сейсмограммы на i приемнике от источников хir в пунктах xs можно оценить на основании хорошо известного соотношения (2)Gkj, m - производная функции Грина по оси m;Mjk - тензор моментов точечного источника, расположенного в xs. Минимум несоответствия по методу наименьших квадратов, определяемый уравнением (1), в общем случае не является единственным. Для разрешения этой проблемы предпочтительно сделать два допущения: во-первых, аппроксимировать источник как единственный точечный источник xs, чтобы сумма по xs в уравнении (2) исчезла; во-вторых, функцию источник-время можно аппроксимировать дельта-функцией источник-время, вследствие чего свертка в уравнении (2) заменится умножением. При использовании этих аппроксимаций уравнение (2) приводится к Известно, что уравнение (3) имеет единственное решение для М при определенных начальном моменте t0 времени, местоположении xs точечного источника и модели инверсии. Поэтому компромисс между параметрами источника можно минимизировать путем поиска на сетке сейсмических профилей по местоположению источников и начальным моментам времени для наилучшего соответствия тензорам моментов. Поиск на сетке для всех возможных начальных моментов времени в численном отношении является громоздким, и поэтому его ускоряют путем оценки начального момента времени по взаимной корреляции синтетических сигналов и данных и затем использования поиска на сетке сейсмических профилей вокруг этой начальной приближенной оценки. Используемый способ заключается в следующем (фиг. 2): последовательно регистрируют акустические данные из разрыва (этап 20); осуществляют оценку исходного начального момента t0 (xs) времени на каждом возможном месте xs расположения источника (этап 21); осуществляют поиск на сетке сейсмических профилей вокруг оцененного начального времени для каждого местоположения источника (этап 22). Для каждого начального момента времени находят единственное решение M(xs,t0(xs (минимум методом наименьших квадратов) (этап 23) и оценивают несоответствие методом наименьших квадратов между данными и синтетическими сигналами (этап 24); сохраняют наилучшее решение для каждого местоположения источника (этап 25). Затем оценивают (этап 26) тензор моментов разрыва совместно с начальным моментом и местоположением для определения характеристик разрыва. Первоначальную оценку начального момента времени осуществляют путем взаимной корреляции данных и синтетических сейсмограмм для выбранного механизма источника, например для вертикального перемещения. Взаимную корреляцию оценивают в пределах временного интервала (0,Tj) для каждого приемника j. Осуществляют взаимную корреляцию абсолютных значений соответствующих элементов для каждого приемника и вычисляют временные сдвиги максимумов взаимной корреляции для каждого элемента. Путем использования абсолютных значений сейсмограмм для взаимной корреляции уменьшают зависимость от неизвестного механизма источника. Наличие временных сдвигов каждой компоненты и известных начальных моментов времени синтетических сейсмограмм позволяет оценивать абсолютное значение начального момента t0ij времени для каждой компоненты i и приемника j. Чтобы уменьшить число плохих оценок, являющихся следствием взаимно коррелирующихся трасс с преобладанием шума, производят взвешивание оценок посредством максимальной амплитуды зарегистрированных сейсмограмм. Следует отметить, что использование максимальной амплитуды в качестве веса при усреднении начального момента времени предполагает, что отношение сигнала к шуму пропорционально максимальной амплитуде зарегистрированных сейсмограмм. Поэтому конечная оценка начального момента времени представляет собой арифметическое взвешенное усреднение с весами из максимальных амплитуд Aij компоненты i на приемнике j Эту взаимную корреляцию можно дополнительно улучшить путем выполнения требующего больших затрат времени расчета при использовании огибающих сигналов вместо амплитуд. Затем определяют истинный начальный момент времени путем поиска на сетке сейсмических профилей вокруг первоначальной оценки начального момента времени в пределах преобладающего [наиболее короткого] периода в сигнале. При ограничении поиска на сетке до главного периода сигнала требуется, чтобы первоначальная оценка (4) начального момента времени находилась в пределах главного периода. Это является типичным случаем для вступления S-волны. При поиске на сетке вокруг первоначальной оценки (4) начального момента времени исключаются проблемы, связанные с пропуском цикла,когда для функции взаимной корреляции характерен пик в каждую половину главного периода (обычно минимального периода, имеющегося в данных). Продолжительность временного этапа при поиске на сетке задают так, чтобы получать требуемую точность несоответствия (1). В предположении, что синтетические сейсмограммы согласованы с данными (т.е. путем использования истинного механизма моментов и оценки синтетических сейсмограмм в истинной модели на основании истинного местоположения источника), нормированное несоответствие гармонического сигнала с периодом Т, обусловленное временным сдвигом Т в начальном моменте времени, может быть оценено как Определение погрешности в уравнении (2) имеет максимальное значение 2 для сдвига на половину периода, и даже небольшой временной сдвиг приводит к большой погрешности для несоответствия, определенного по аналогии с уравнением (1). Продолжительность временного этапа для поиска на сетке можно положить равным 2 Т, при которой максимальная погрешность оценки несоответствия достигает определенного предела. Например, сдвиг 0,05 Т (=0,05) может привести к относительной погрешности Е=0,05. Поэтому поиск для начального момента времени при шаге 0,1T сетки (Т - главный период в сейсмограммах) не должен приводить к погрешности оценки функции несоответствия, превышающей 0,05. Последняя часть способа заключается в идентификации единственного решения M(xs, t0(xs для каждого начального момента времени и местоположения источника. Известно, что тензор моментов из уравнения (1) в случае приведения к минимуму методом наименьших квадратов имеет вид где МI(черта) - i компонента шестиэлементного вектора: МI(черта)=М 11, М 2(черта)=М 12=М 21,М 3(черта)=М 22, М 4(черта)=М 13=М 31, М 5(черта)=М 3=М 32, М 6(черта)=М 33, a D имеет шесть независимых элементов Наконец, А представляет собой матрицу 66 с элементами Шаги интегрирования (7) и (9) можно ускорить путем использования временного окна от tmin доtmax, где tmin представляет собой время прихода первой волны от источника (разрыва), обнаруживаемой приемником волны, a tmax представляет собой максимальное время, при котором формы колебаний волны являются согласованными, например время прихода фазы колебаний с максимальной амплитудой. В этом варианте из зарегистрированных данных исключается эффект отражений или трубные волны. При извлечении тензора М моментов из трехкомпонентных записей волнового поля путем решения-4 007942 задачи инверсии методом наименьших квадратов решение может быть неустойчивым, поскольку, например, ранг матрицы А может быть неполным. Для получения устойчивого решения этой задачи можно использовать алгебраическую регуляризацию. Чтобы регуляризировать задачу, отбирают только наибольшие собственные значения вместе с числом обусловленности ниже заданного предела и выполняют усеченное разложение по собственным значениям. Степень сингулярности матрицы определяют путем вычисления числа обусловленности матрицы для каждого из собственных значений. Число обусловленности выражается соотношением между каждым собственным значением и наибольшим собственным значением. Критерий порога заключается в проверке того, что число обусловленности не превышает порогового значения. Каждое число обусловленности сравнивают с пороговым значением. Число собственных значений, которое удовлетворяет критерию порога, эквивалентно рангу матрицы. После определения числа к собственных значений, которые обеспечивают получение линейно независимых решений, усеченное разложение по особым значениям используют для решения обратной задачи. Новое обратное решение находят с помощью следующего выражения:I - собственные значения, получаемые с помощью разложения по особым значениям. Для обращения матрицы в уравнении (10) используют только собственные векторы, соответствующие подходящим к собственным значениям. Дополнительно возможно связать с каждым регистрирующим устройством или с трассой весовую функцию, которая служит признаком качества приемника и/или зарегистрированных данных. Эти веса могут быть введены в представленные уравнения (7) и (9). Затем оценивают синтетическую функцию Грина в уравнении (3) путем трехкратного вычисления моделей (при использовании конечных разностей) форм волн на приемниках Nr. В пунктах приема для каждого трехкомпонентного приемника вычисляют три отклика от трех ортогональных источников силы, а производные скорости (или смещения) сохраняют для каждого возможного местоположения xs источника. Синтетические сейсмограммы оценивают с помощью дельта-функции в виде функции времени источника. Используя принцип взаимности, оценивают производные функций Грина для каждого возможного местоположения источника относительно каждого положения приемника. Из уравнения (3) следует, что для каждого возможного местоположения источника необходимо сохранять шесть трасс. Указанным выше уравнением обеспечивается полный набор шагов для вычисления тензора М моментов по трехкомпонентным записям волнового поля. Затем разлагают сам тензор, чтобы получить параметры, характеризующие разрыв. Способы разложения тензора М моментов разработаны для анализа землетрясений, и их описал, например, Vavrycuk V. в Journal of Geophysical Research, vol. 106,B8, August 10, 2001, 16339-16355. Параметры, получаемые при таком разложении, включают в себя нормаль n разрыва, направление N смещения и произведения коэффициентов Ламе и смещения и разрыва, то естьu и u соответственно. Альтернативно тензор моментов может быть инвертирован для получения набора параметров, включая ориентацию осей давления Р и напряжения Т, параметр =/ и наклонсмещения u в результате разрыва. Эти параметры представляют информацию об ориентации разрыва и направлении смещения, которое, в свою очередь, может быть использовано для управления операцией гидравлического разрыва пласта. Точность инверсии от зарегистрированных данных dj к тензору М моментов источника дополнительно может быть повышена путем ограничения полосы частот данных. Хотя ограничение данных частотным диапазоном в пределах 0-100 Гц дает удовлетворительные результаты, повышенная точность достигается путем дальнейшего ограничения данных частотным диапазоном в пределах 0-75 Гц или даже частотным диапазоном в пределах 0-50 Гц. На фиг. 3 показана диаграмма результатов 31 измерений(синтетических) скорости геофоном по направлениям х, у и z с наложенными соответствующими трассами 32, пересчитанными путем использования тензора моментов, полученного способом, описанным выше (при известной скоростной модели). ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ пассивного контроля подземного местоположения, заключающийся в том, что получают многокомпонентные сигналы микросейсмической волны в пределах местоположения и осуществляют инверсию (обратное преобразование) формы волны, для чего минимизируют несоответствие между синтетическими сейсмограммами и сигналами для определения параметров, представляющих собой характеристики источника указанной микросейсмической волны, при этом параметрами, представляющими собой характеристики источника микросейсмической волны, являются тензор моментов, или местоположение источника, или начальный момент времени.-5 007942 2. Способ по п.1, отличающийся тем, что запись сигналов осуществляют, по меньшей мере, для определения характеристик источника, которые фильтруют на нижних частотах или ограничивают по полосе в частотном диапазоне от 0 до 100 Гц. 3. Способ по п.1, отличающийся тем, что микросейсмическую волну вызывают в скважине посредством операции гидравлического разрыва пласта. 4. Способ по п.1, отличающийся тем, что осуществляют оценку функции Грина для выделения характеристик источника из полученных сигналов. 5. Способ по п.1, отличающийся тем, что полученные сигналы обрабатывают для идентификации вступлений Р-волны или S-волны до инверсии волнового поля. 6. Способ по п.1, отличающийся тем, что дополнительно используют разложение одиночных значений для стабилизации инверсии формы волны. 7. Способ по п.1, отличающийся тем, что осуществляют минимизацию разности между полученными сигналами и синтетическими сигналами. 8. Способ по п.1, отличающийся тем, что осуществляют минимизацию разности между полученными сигналами и синтетическими сигналами, при этом синтетические сигналы зависят от оцененных характеристик источника. 9. Способ по п.8, отличающийся тем, что на шаге минимизации разности между полученными сигналами и синтетическими сигналами осуществляют поиск по местоположениям источника и начальным моментам времени для оцененных характеристик источника. 10. Способ по п.8, отличающийся тем, что на шаге минимизации разности между полученными сигналами и синтетическими сигналами осуществляют поиск на сетке (синтетических профилей) по местоположениям источника, начальным моментам времени для оцененных характеристик источника. 11. Способ по п.10, отличающийся тем, что дополнительно осуществляют следующие шаги: оценивают исходный начальный момент времени на возможных местах расположения источника,осуществляют поиск вокруг оцененного начального момента времени для каждого местоположения источника,для указанных начальных моментов времени определяют единственное решение тензора моментов источника,оценивают методом наименьших квадратов несоответствие между зарегистрированными сигналами и синтетическими сигналами, полученными путем вычисления сигналов, вызванных источником указанного тензора моментов в местах нахождения приемников,сохраняют наилучшее полученное решение для каждого местоположения источника. 12. Способ по п.1, отличающийся тем, что функцию времени разрыва источника аппроксимируют дельта-функцией.
МПК / Метки
МПК: G01V 1/28
Метки: способ, явлений, сейсмических, контроля
Код ссылки
<a href="https://eas.patents.su/8-7942-sposob-kontrolya-sejjsmicheskih-yavlenijj.html" rel="bookmark" title="База патентов Евразийского Союза">Способ контроля сейсмических явлений</a>
Способ выделения сейсмических сигналов, а также определения и коррекции геометрических и статических ошибок в сейсмических данных
Номер патента: 1766
Опубликовано: 27.08.2001
Автор: Мартин Федерико
МПК: G01V 1/36
Метки: сигналов, способ, геометрических, определения, сейсмических, также, выделения, коррекции, ошибок, данных, статических
Формула / Реферат:
1. Способ автоматического выделения сейсмических сигналов с практически линейными осями синфазности в данных, полученных с применением многоэлементных систем наблюдений, причем для сборок трасс с общим элементом, по меньшей мере, один элемент данных включает источник и, по меньшей мере, еще один элемент данных включает приемник, включающий следующие операции: вычисление комплексной огибающей трасс сборки; сортировку сборок по первой элементной...
Способ прогнозирования аномальных явлений
Номер патента: 353
Опубликовано: 29.04.1999
Авторы: Космачев Владимир Алексеевич, Суханов Юрий Семенович
МПК: G01V 9/00, G01V 7/00, G01V 1/00...
Метки: явлений, аномальных, прогнозирования, способ
Формула / Реферат:
Способ прогнозирования аномальных явлений, включающий непрерывное измерение физического параметра вещества-индикатора, статистическую обработку и графическое построение результатов измерений с указанием вероятной мощности места и времени наступления ожидаемого аномального явления и последующее оповещение, отличающийся тем, что непрерывно измеряют и регистрируют изменение веса вещества-индикатора путем непрерывного взвешивания, выявляют амплитуду...
Устройство для приема сейсмических волн и способ его соединения с твердой средой
Номер патента: 3030
Опубликовано: 26.12.2002
Автор: Менье Жюльен
МПК: G01V 1/16
Метки: средой, устройство, соединения, твердой, приема, способ, сейсмических, волн
Формула / Реферат:
1. Устройство для приема сейсмических волн, исходящих из твердой среды (5), такой как подпочва, содержащее, по меньшей мере, один гидрофон (2), размещенный во впадине (6) среды и соединенный с ней, отличающееся тем, что содержит закрытую оболочку (7) с гибкой мембраной, предназначенной для плотного соединения со средой точно по всей поверхности, и заполнения жидкостью (8), в которую помещается гидрофон (2), оболочка (7) закрыта с одного конца...
Способ обработки сейсмических данных
Номер патента: 5228
Опубликовано: 30.12.2004
Автор: Лини Скотт Вальтер
МПК: G01V 1/30
Метки: способ, данных, обработки, сейсмических
Формула / Реферат:
1. Способ обработки сейсмических данных, заключающийся в том, что используют сейсмические данные вертикального сейсмического профилирования (ВСП) для определения модели скорости сейсмической энергии для одной или более P-волн, используют указанную модель скорости сейсмической энергии P-волн для обработки сейсмических данных. 2. Способ по п.1, отличающийся тем, что использование сейсмических данных ВСП для определения модели скорости сейсмической...
Способ и устройство для обработки трехкомпонентных сейсмических данных
Номер патента: 3422
Опубликовано: 24.04.2003
Автор: Гидлоу Морис
МПК: G01V 1/36
Метки: сейсмических, устройство, данных, обработки, способ, трехкомпонентных
Формула / Реферат:
1. Способ обработки сейсмических сигналов, включающий считывание сейсмических данных, зарегистрированных многокомпонентным приемником; создание вспомогательной трассы, являющейся функцией сейсмических данных, и отождествление монотипных сейсмических сигналов в сейсмических данных на основе использования этой трассы. 2. Способ по п.1, отличающийся тем, что сейсмические данные, зарегистрированные многокомпонентным приемником, содержат данные об...
Предыдущий патент: Мобильная рлс кругового обзора метрового диапазона волн
Следующий патент: Способ извлечения энергии из дымовых газов
Случайный патент: Резонансно-усиленное вращательное бурение