Устройство и способ определения удельного сопротивления с помощью направленной электромагнитной волны
Номер патента: 7587
Опубликовано: 29.12.2006
Авторы: Ли Цимин, Ян Либо, Ху Линьюнь, Чоу Лоренс, Дюмон Ален, Омераджик Дзеват



Формула / Реферат
1. Способ получения характеристик подземного пласта, включающий в себя этапы, на которых
размещают внутри ствола скважины каротажный прибор, оснащенный по меньшей мере первыми антеннами, одна из которых является передающей, а другая приемной, отстоящими на некоторое первое расстояние друг от друга, причем по меньшей мере одна из первых антенн представляет собой щелевой симметричный вибратор, наклоненный относительно продольной оси прибора, при этом первые антенны ориентированы относительно оси каротажного прибора таким образом, что по меньшей мере один наклоненный щелевой симметричный вибратор соответствует первому азимутальному углу;
осуществляют азимутальное вращение каротажного прибора внутри ствола скважины;
когда каротажный прибор вращается, включают первую передающую антенну для передачи электромагнитной энергии в пласт;
когда каротажный прибор вращается, осуществляют направленное измерение первых сигналов напряжения, связанных с передаваемой электромагнитной энергией, с помощью первой приемной антенны в зависимости от азимутальной ориентации каротажного прибора для определения азимутального изменения измеренных первых сигналов напряжения; и
осуществляют аппроксимацию азимутального изменения измеренных первых сигналов напряжения, чтобы получить функции, являющиеся его приближением.
2. Способ по п.1, при котором этап аппроксимации проводят во время измерения первых сигналов напряжения.
3. Способ по п.2, дополнительно включающий в себя этап, на котором прекращают аппроксимацию, когда достигнута сходимость.
4. Способ по п.1, при котором аппроксимирующие функции являются синусоидами, определяемыми путем связывания компонентов векторов ориентации щелевого симметричного вибратора первой передающей антенны и первой приемной антенны.
5. Способ по п. 4, при котором коэффициенты аппроксимирующих составляющих являются функциями параметров пласта грунта, включая по меньшей мере один из таких параметров, как удельное сопротивление слоев пласта, место нахождения каротажного прибора, отклонение ствола скважины, азимутальный угол в месте нахождения каротажного прибора, а также их комбинацию.
6. Способ по п.5, при котором аппроксимирующие коэффициенты включают в себя постоянные, а также члены, содержащие sinf, cosf, sin2f и cos2f, которые определяют итеративный алгоритм аппроксимации, используемый для определения азимутальной зависимости направленных измерений.
7. Способ по п.6, при котором используют итеративный алгоритм аппроксимации для выбранных направленных измерений в реальном масштабе времени, применяемых при геоуправлении.
8. Способ по п.1, при котором каротажный прибор также оснащен вторыми антеннами, одна из которых является передающей, а другая приемной, отстоящими на некоторое первое расстояние друг от друга, причем вторая передающая антенна представляет собой щелевой симметричный вибратор, наклон которого соответствует наклону первой приемной антенны, а вторая приемная антенна представляет собой щелевой симметричный вибратор, наклон которого соответствует наклону первой передающей антенны, так что по меньшей мере одна из вторых антенн представляет собой наклоненный щелевой симметричный вибратор, при этом вторые передающая и приемная антенны ориентированы относительно оси каротажного прибора таким образом, что по меньшей мере один наклоненный щелевой симметричный вибратор соответствует второму азимутальному углу, и при этом способ также включает в себя этапы, на которых
когда каротажный прибор вращается, включают вторую передающую антенну для передачи электромагнитной энергии в пласт;
когда каротажный прибор вращается, осуществляют направленное измерение второй группы сигналов напряжения, передающих электромагнитную энергию с помощью второй приемной антенны в зависимости от азимутальной ориентации каротажного прибора, чтобы определить азимутальное изменение измеренных вторых сигналов; и
осуществляют аппроксимацию азимутального изменения измеренных вторых сигналов напряжения, чтобы получить функции, являющиеся его приближением.
9. Способ по п.8, при котором второй азимутальный угол отличается от первого азимутального угла, по существу, на 90° .
10. Способ по п.8, при котором аппроксимирующие функции являются синусоидами, определяемыми путем связывания компонентов векторов ориентации щелевого симметричного вибратора первой передающей антенны и первой приемной антенны, а также путем связывания компонентов векторов ориентации щелевого симметричного вибратора второй передающей антенны и второй приемной антенны.
11. Способ по п.10, при котором коэффициенты аппроксимирующих составляющих являются функциями таких параметров пласта грунта, как удельное сопротивление слоев пласта, место нахождения каротажного прибора, отклонение ствола скважины и азимутальный угол в месте нахождения каротажного прибора.
12. Способ по п. 11, при котором измеренные первые и вторые сигналы напряжения являются комплексными сигналами напряжения, а способ дополнительно включает в себя этапы, на которых
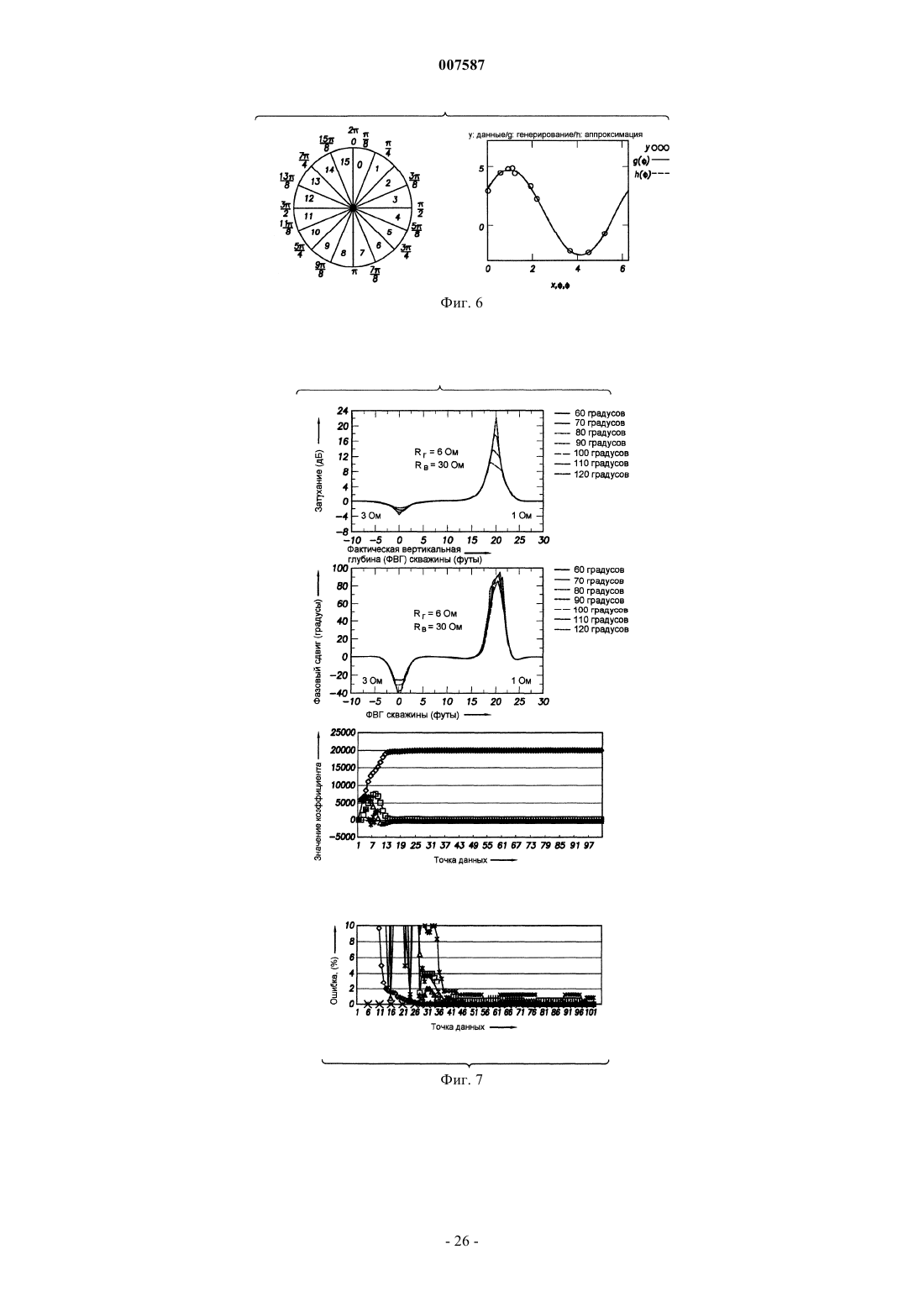
вычисляют значения фазового сдвига и затухания на основании аппроксимирующих коэффициентов для измеренных первых и вторых сигналов напряжения и
объединяют вычисленные значения фазового сдвига и затухания для измеренных первых и вторых сигналов напряжения для формирования симметризованного или антисимметризованного результата измерений.
13. Способ по п.11, при котором лишь одна из первых антенн имеет наклоненный щелевой симметричный вибратор, а способ дополнительно включает в себя этап, на котором определяют характеристики шума измеренных первых и вторых сигналов напряжения с использованием коэффициентов гармоник второго порядка.
14. Способ по п.11, при котором каждая из первых антенн представляет собой наклоненный либо поперечный щелевой симметричный вибратор, а аппроксимирующие коэффициенты включают в себя коэффициенты гармоник третьего порядка, причем способ дополнительно включает в себя этап, на котором определяют характеристики шума измеренных первых и вторых сигналов напряжения с использованием коэффициентов гармоник третьего порядка.
15. Способ по п.11, при котором определяют характеристики шума измеренных первых и вторых сигналов напряжения посредством объединения первых и вторых измеренных сигналов напряжения.
16. Способ по п.11, при котором вторые антенны являются симметричными относительно первых антенн, а способ дополнительно включает в себя этапы, на которых
временно останавливают вращение каротажного прибора;
определяют азимут интересующего слоя путем объединения связей первых и вторых антенн;
определяют постоянные коэффициенты и коэффициенты гармоник первого порядка на основании первых и вторых сигналов напряжения, снятых, когда прибор не вращается; и
используют постоянные коэффициенты для выполнения этапа аппроксимации, когда каротажный прибор вращается.
17. Способ по п.16, дополнительно включающий в себя этапы, на которых обновляют азимутальные изменения измеренных первых и вторых сигналов напряжения и повторно вычисляют эквивалентные напряжения, когда инструмент находится в плоскости наслоения.
18. Способ по п.1, дополнительно включающий в себя этап, на котором вычисляют амплитуду и фазу измеренного сигнала напряжения в предполагаемом направлении нормали к границе интересующего слоя.
19. Способ по п.18, дополнительно включающий в себя этап, на котором определяют фазовый сдвиг и затухание, проводя измерения посредством каротажа на основе распространения ЭМ волн для двух азимутальных углов.
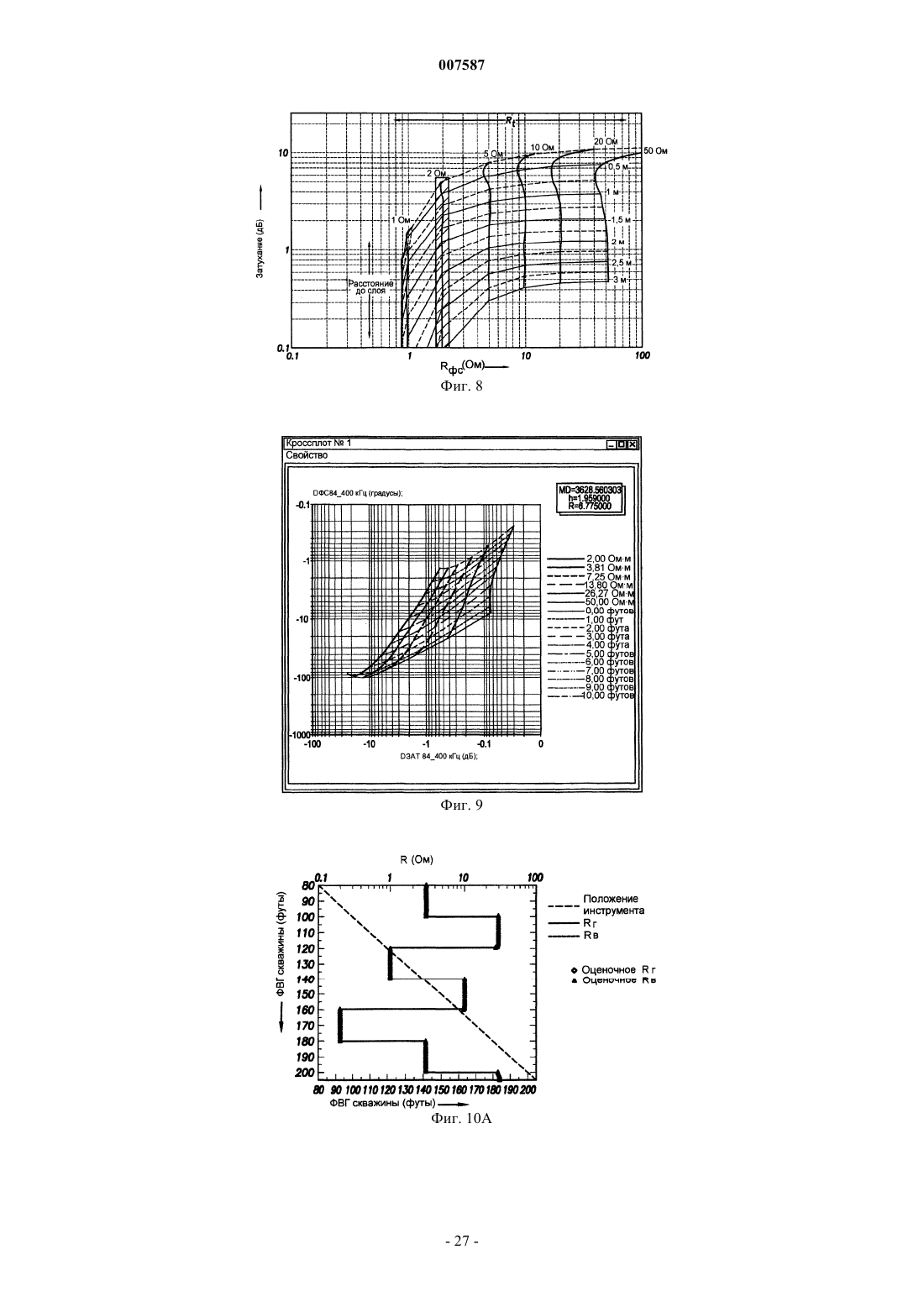
20. Способ определения характеристик подземного пласта, включающий в себя этапы, на которых
генерируют график, используя два типа направленных измерений в качестве области значений и области определения графика и имея удельные сопротивления пласта и расстояние до границы слоя, нанесенной на график, формируют вслед за тем координатную сетку;
выбирают фтр направленных каротажных измерения, получаемых от прибора, размещенного в стволе скважины, пересекающей пласт;
определяют расположение точки на графике при помощи нанесения на график двух направленных каротажных измерений в качестве пары координат; и
получают расстояние до границы слоя и удельное сопротивление пласта при помощи формирования графика взаимной зависимости для соответствующих значений координатной сетки в точке, расположение которой определено.
21. Способ по п.20, при котором этап формирования графика взаимной зависимости осуществляют с использованием модели с одной границей, при этом полученное удельное сопротивление является удельным сопротивлением на границе раздела "слой - уступ в месте искривления скважины", а полученное расстояние является наименьшим расстоянием до границы раздела "слой - уступ в месте искривления скважины".
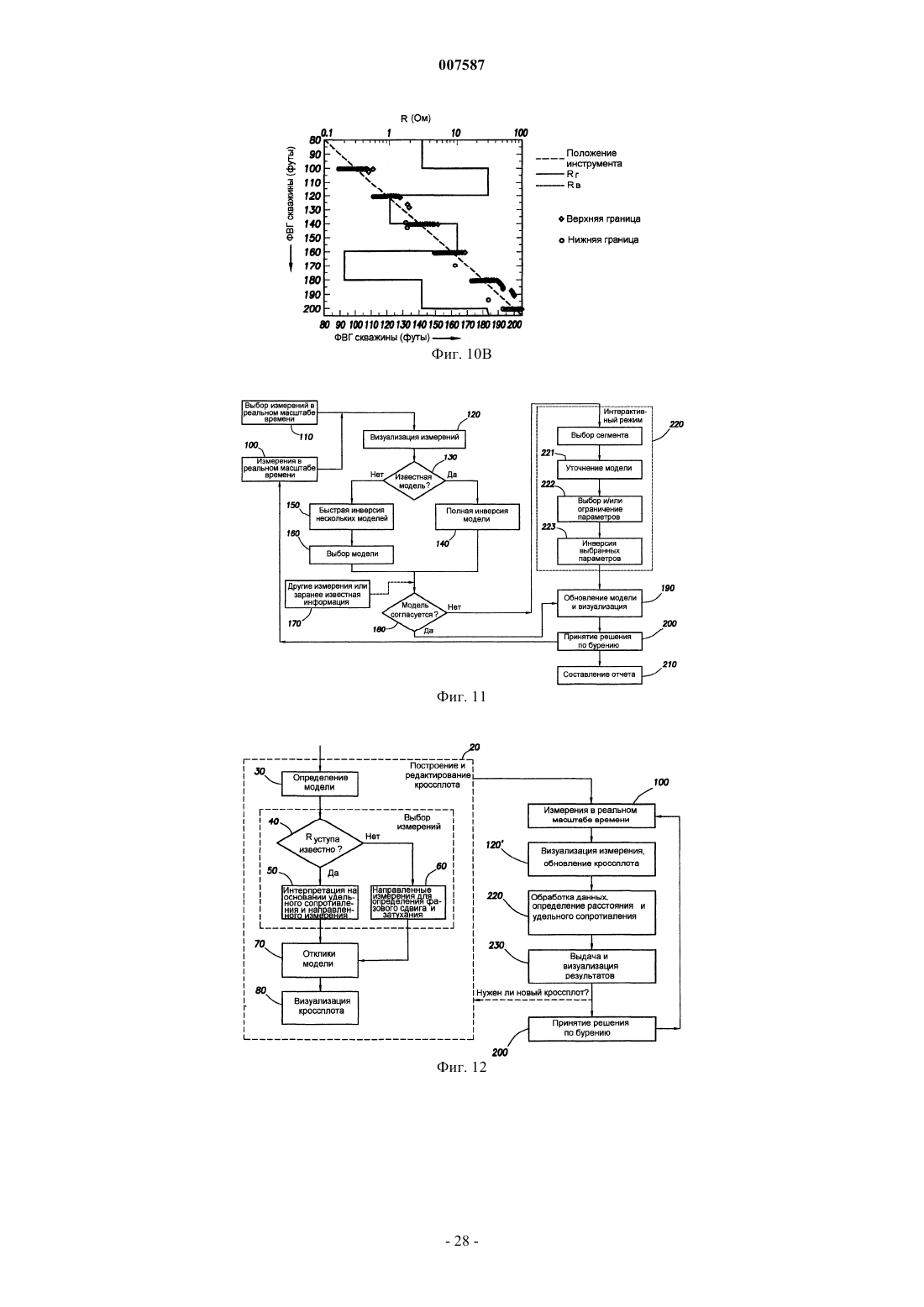
22. Способ по п.20, при котором полученные удельное сопротивление и расстояния используются для принятия решений по бурению.
23. Способ определения характеристик подземного пласта, включающий в себя этапы, на которых
генерируют график, используя удельное сопротивление и направленное измерение в качестве области значений и области определения графика и имея удельные сопротивления пласта и расстояние до границы слоя, нанесенной на график, формируют вслед за тем координатную сетку;
выбирают удельное сопротивление и направленное измерение, получаемые от прибора, размещенного в стволе скважины, пересекающей пласт;
определяют расположение точки на графике при помощи нанесения на график удельного сопротивления и направленного измерения в качестве пары координат; и
получают расстояние до границы слоя и удельное сопротивление пласта при помощи формирования графика взаимной зависимости для соответствующих значений координатной сетки в точке, расположение которой определено.
24. Способ определения характеристик подземного пласта, включающий в себя этапы, на которых
генерируют график, используя удельное сопротивление и направленное измерение в качестве области значений и области определения графика и имея удельные сопротивления пласта и расстояние до границы слоя, нанесенной на график, формируют вслед за тем координатную сетку;
выбирают удельное сопротивление и два направленных каротажных измерения, получаемых от прибора, размещенного в стволе скважины, пересекающей пласт;
определяют расположение двух точек на графике при помощи нанесения на график удельного сопротивления и каждого из двух направленных каротажных измерений в качестве пары координат; и
получают расстояние до границы слоя и удельное сопротивление пласта для по меньшей мере двух слоев пласта при помощи формирования графика взаимной зависимости для соответствующих значений координатной сетки в точках, расположение которых определено.
25. Способ по п.24, дополнительно включающий в себя этап, на котором
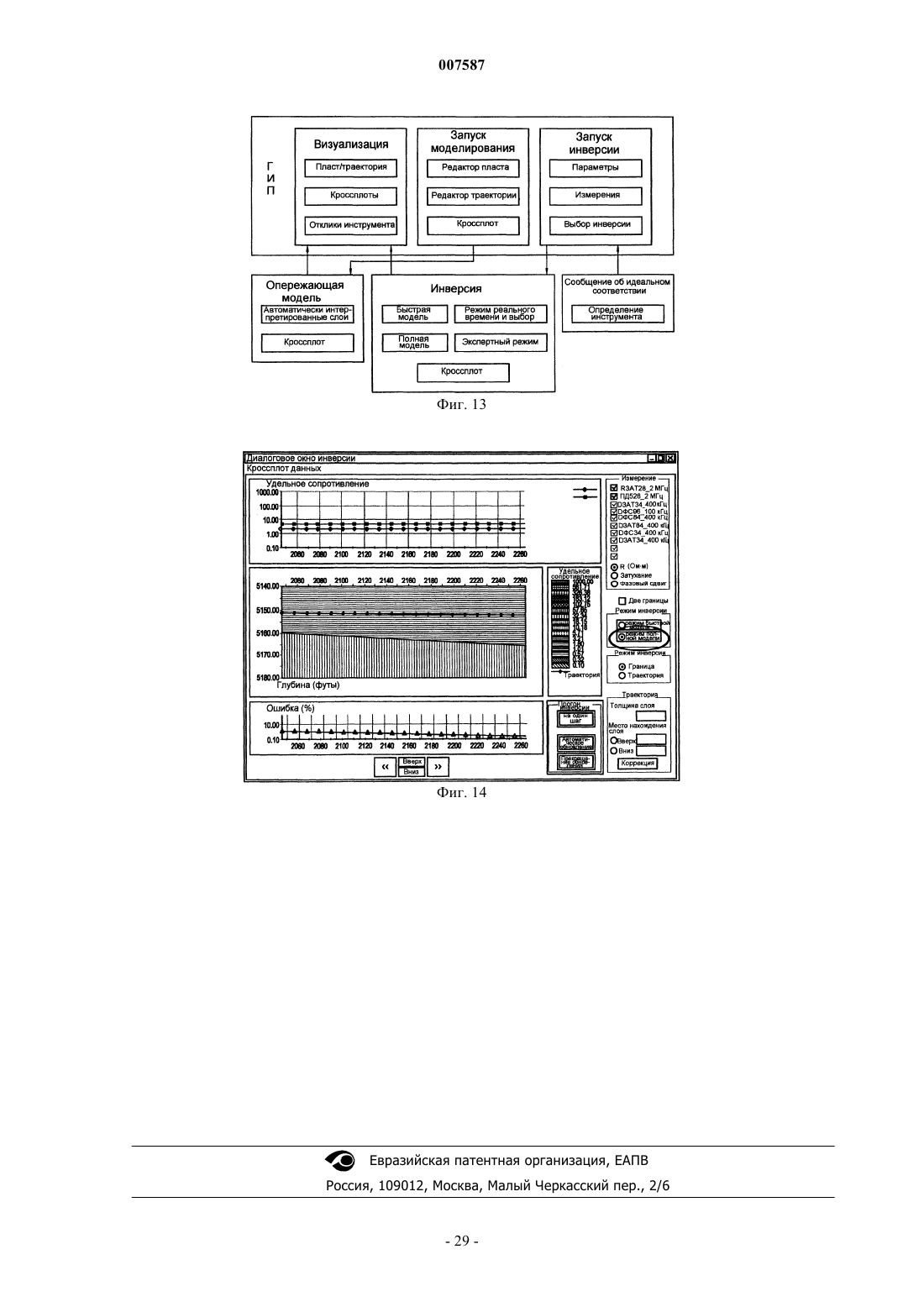
выбирают подходящую инверсную модель для выбранных направленных измерений в реальном масштабе времени;
проверяют, согласуется ли выбранная модель с другой информацией; и
используют проверенную модель для принятия решений по бурению.
26. Способ по п.25, при котором этап выбора модели включает в себя создание визуализации выбранных направленных измерений.
27. Способ по п.25, при котором этап выбора модели включает в себя
идентификацию параметров известной информации;
интерактивный выбор моделей, с помощью которых следует инвертировать выбранные направленные измерения; и
выбор простейшей модели, которая аппроксимирует известную информацию.
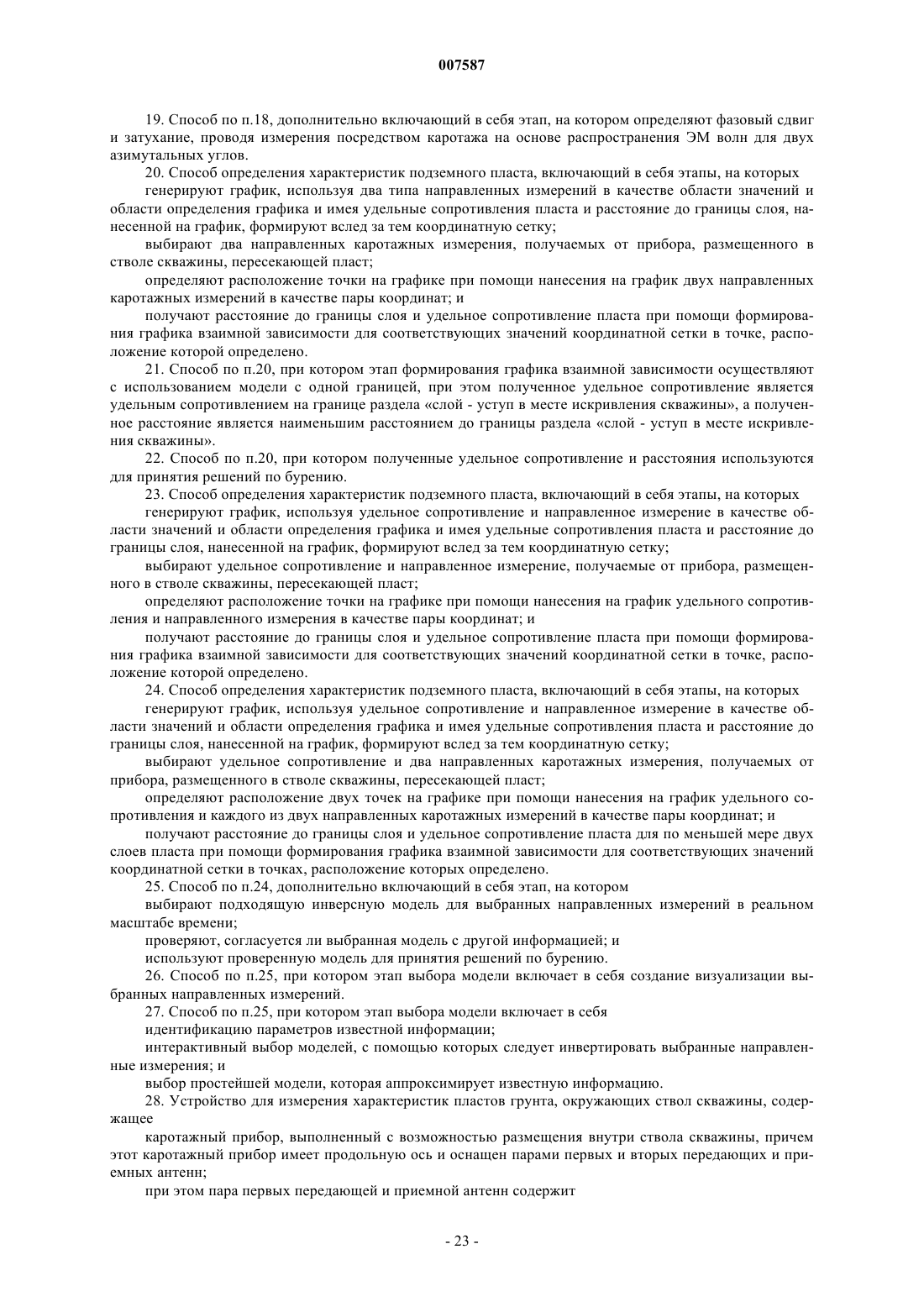
28. Устройство для измерения характеристик пластов грунта, окружающих ствол скважины, содержащее
каротажный прибор, выполненный с возможностью размещения внутри ствола скважины, причем этот каротажный прибор имеет продольную ось и оснащен парами первых и вторых передающих и приемных антенн;
при этом пара первых передающей и приемной антенн содержит
первую передающую антенну, представляющую собой щелевой симметричный вибратор, ориентированный в первом направлении относительно продольной оси каротажного прибора; и
первую приемную антенну, находящуюся на первом расстоянии от первой передающей антенны, представляющую собой щелевой симметричный вибратор, ориентированный во втором направлении, причем первое и второе направления различаются;
при этом щелевые симметричные вибраторы первых передающей и приемной антенн определяют плоскость, в которой лежит продольная ось каротажного прибора;
при этом пара вторых передающей и приемной антенн содержит
вторую передающую антенну, представляющую собой щелевой симметричный вибратор, ориентированный во втором направлении относительно продольной оси каротажного прибора; и
вторую приемную антенну, находящуюся на первом расстоянии от второй передающей антенны и представляющую собой щелевой симметричный вибратор, ориентированный в первом направлении, причем первое и второе направления являются разными;
причем щелевые симметричные вибраторы вторых передающей и приемной антенн определяют плоскость, в которой лежит продольная ось каротажного прибора, а устройство также содержит
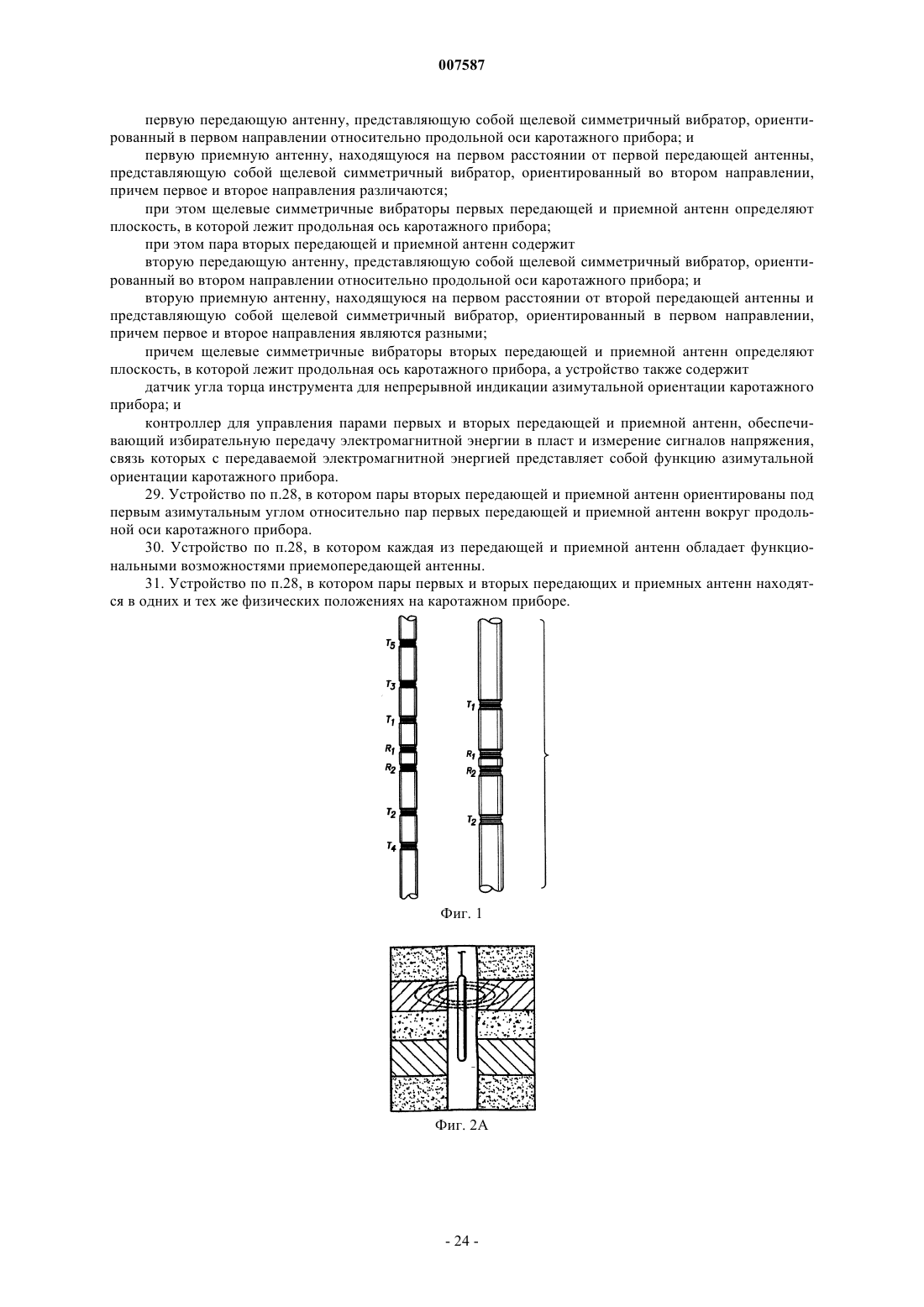
датчик угла торца инструмента для непрерывной индикации азимутальной ориентации каротажного прибора; и
контроллер для управления парами первых и вторых передающей и приемной антенн, обеспечивающий избирательную передачу электромагнитной энергии в пласт и измерение сигналов напряжения, связь которых с передаваемой электромагнитной энергией представляет собой функцию азимутальной ориентации каротажного прибора.
29. Устройство по п.28, в котором пары вторых передающей и приемной антенн ориентированы под первым азимутальным углом относительно пар первых передающей и приемной антенн вокруг продольной оси каротажного прибора.
30. Устройство по п.28, в котором каждая из передающей и приемной антенн обладает функциональными возможностями приемопередающей антенны.
31. Устройство по п.28, в котором пары первых и вторых передающих и приемных антенн находятся в одних и тех же физических положениях на каротажном приборе.

Текст
007587 Область техники Изобретение относится в основном к области каротажа скважин. Более конкретно, изобретение относится к усовершенствованным способам, при осуществлении которых приборы, оснащенные антенными системами, представленными в виде поперечного или наклоненного щелевого симметричного вибратора, используются для электромагнитных измерений подземных пластов и для надлежащего расположения скважин относительно геологических границ в коллекторе. Изобретение находит основное применение в области каротажа скважин, а конкретно используется на операции каротажа в процессе бурения. Предшествующий уровень техники В области разведки и добычи углеводородов хорошо известны различные способы каротажа скважин. При осуществлении этих способов обычно используют приборы или инструменты, оснащенные источниками, предназначенными для излучения энергии в подземный пласт, который пронизан стволом скважины. В этом описании термины прибор и инструмент будут употребляться как взаимозаменяемые, чтобы указать, например, электромагнитный прибор (или инструмент), инструмент (или прибор), спускаемый в скважину на тросе, либо инструмент (или прибор) для каротажа в процессе бурения. Излученная энергия взаимодействует с подземным пластом, вследствие чего формируются сигналы, которые затем обнаруживаются и измеряются посредством одного или более датчиков. Путем обработки данных, соответствующих обнаруженным сигналам, получают профиль свойств пласта. Хорошо известны способы каротажа с использованием индукции распространения электромагнитных волн (ЭМ). Каротажные приборы располагают внутри ствола скважины для измерения удельной электропроводности (или обратной ей величины - удельного сопротивления) пластов грунта, окружающих ствол скважины. В данном описании любое указание удельной электропроводности следует считать относящимся также к обратной ей величине удельному сопротивлению, и наоборот. Типичный электромагнитный инструмент для измерения удельного сопротивления содержит передающую антенну и одну или более (в типичном случае - пару) приемных антенн, расположенных на некотором расстоянии от передающей антенны вдоль оси инструмента (см. фиг. 1) . Индукционные инструменты измеряют удельное сопротивление (или удельную электропроводность) пласта путем изменения напряжения, индуцируемого в приемной антенне (приемных антеннах) в результате появления магнитного потока, индуцируемого токами, протекающими по излучающей антенне (или передающей антенне). Инструмент каротажа на основе распространения ЭМ волн работает аналогичным образом, но, как правило, на более высоких частотах, чем индукционные инструменты, для сравнимых расстояний между антеннами (примерно 106 Гц для инструментов на основе распространения ЭМ волн по сравнению с примерно 104 Гц для индукционных инструментов). Типичный инструмент на основе распространения ЭМ волн может работать в диапазоне частот от 1 кГц до 2 МГц. Обычные передающие и приемные антенны представляют собой катушки, содержащие один или более витков провода в виде изолированного проводника, намотанного на опору. Эти антенны обычно работают как передатчики и/или приемники. Специалистам в данной области техники должно быть понятно, что одну и ту же антенну можно использовать как передающую в один момент времени и как приемную - в другой. Следует также понять, что описываемые здесь передающие и приемные конфигурации являются взаимозаменяемыми ввиду принципа взаимности, т.е. передающая антенна может быть использована как приемная, и наоборот. Принцип работы антенн состоит в том, что катушка, проводящая ток (например, передающая катушка) генерирует магнитное поле. Электромагнитная энергия из передающей антенны передается в окружающий пласт, и эта передача индуцирует вихревые токи, протекающие в пласте вокруг передатчика(см. фиг. 2 А). Эти вихревые токи, индуцируемые в пласте, которые являются функциями удельного сопротивления пласта, генерируют магнитное поле, которое, в свою очередь, генерирует электрическое напряжение в приемных антеннах. Если используется пара отстоящих друг от друга приемников, то индуцируемые напряжения в двух приемных антеннах будут иметь разные фазы и амплитуды ввиду геометрического разноса и поглощения окружающим пластом. Разность фаз (фазовый сдвиг, Ф) и отношение амплитуд (затухание, А) обоих приемников можно использовать для получения удельного сопротивления пласта. Определяемые фазовый сдвиг (Ф) и затухание (А) зависят не только от разнесения двух приемников и расстояния между передатчиком и приемниками, но также и от частоты ЭМ волн, генерируемых передатчиком. В обычных приборах индукционного и основанного на распространении ЭМ волн каротажа передающие антенны и приемные антенны установлены своими осями вдоль продольной оси прибора. Таким образом, эти инструменты реализуются с антеннами, представленными в виде продольного щелевого симметричного вибратора (ПродЩСВ). Известным способом в области каротажа скважин является использование приборов, включающих в себя антенны, имеющие наклоненные или поперечные катушки,т.е. такие, в которых ось катушки не параллельна продольной оси инструмента. Таким образом, эти инструменты реализованы с поперечной или наклоненной щелевой симметричной вибраторной (ПЩСВ или НЩСВ) антенной. Специалистам в данной области техники известно, что существуют различные способы осуществления наклона антенны. Каротажные приборы, оснащенные ПЩСВ и НЩСВ антенна-1 007587 ми, описаны, например, в патентах США 6163155, 5115198, 4319191, 5508616, 5757191, 5781436,6044325 и 6147496. На фиг. 2 А представлено упрощенное отображение вихревых токов и ЭМ энергии, протекающих от каротажного прибора, расположенного в части или сегменте ствола скважины, который пронизывает подземный пласт в направлении, перпендикулярном слоям осадочных пород. Однако, это не является точным отображением всех многочисленных сегментов, образующих ствол скважины, в частности, когда ствол скважины получен направленным бурением, что описано ниже. Таким образом, сегменты ствола скважины часто пронизывают слои пластов под углом, отличающимся от 90, как показано на фиг. 2 В. Когда это происходит, говорят, что плоскость пласта имеет некоторое относительное падение. Уголотносительного падения определяется как угол между осью ствола скважины (осью инструмента), ВА, и нормалью N к плоскости Р интересующего слоя пласта. Известные в данной области техники способы бурения включают в себя бурение стволов скважин из выбранного географического местоположения на поверхности грунта по выбранной траектории. Эта траектория может проходить в другие выбранные географические местоположения на конкретных глубинах в пределах ствола скважины. Эти способы известны под объединяющим названием способов направленного бурения. Одним приложением направленного бурения является бурение сильно отклоняющихся (от вертикали) или даже горизонтальных стволов скважин в пределах и вдоль относительно тонких углеводородоносных пластов (называемых продуктивными зонами) на значительные расстояния. Эти сильно отклоняющиеся стволы скважин предназначены для значительного увеличения отбора углеводородов из продуктивной зоны по сравнению с обычными стволами скважин, которые пронизывают продуктивную зону вертикально (по существу, перпендикулярно залеганию пласта, как показано на фиг. 2 А) . При бурении сильно отклоняющихся или горизонтальных стволов скважин в пределах продуктивной зоны важно поддерживать траекторию ствола скважины таким образом, чтобы она оставалась в конкретном положении в продуктивной зоне. В данной области техники хорошо известны системы направленного бурения, в которых используются гидравлические забойные двигатели и кривые переходники, а также другие средства для управления поворотом траектории ствола скважины по географическим опорным параметрам, таким, как магнитный север, направление силы земного притяжения (вертикаль) и скорость вращения Земли (относительно инерциального пространства). Однако залегание пластов может быть таким, что продуктивная зона не пролегает вдоль заранее заданной траектории в географических местоположениях, отстоящих от местоположения на поверхности ствола скважины. В типичном случае,оператор буровой скважины использует информацию (например, буровые журналы каротажа в процессе бурения (КвПБ , полученную во время бурения ствола скважины, для поддержания траектории ствола скважины в пределах продуктивной зоны, а также для того, чтобы убедиться в том, что бурение действительно идет в пределах продуктивной зоны. Способы поддержания траектории, известные в данной области техники, описаны, например, в документе Tribe et al., Precise Well Placement using Rotary Steerable Systems and LWD Measurement, Societyof Petroleum Engineers, Paper 71396, September 30, 2001. Способ, описанный в этом документе, основан на откликах датчиков удельной электропроводности, определяемой посредством КвПБ. Если, например,удельная электропроводность продуктивной зоны известна до проникновения в нее ствола скважины, и если удельные электропроводности вышележащей и нижележащей зон создают значительный контраст по отношению к продуктивной зоне, то замер удельной электропроводности пласта во время бурения можно использовать в качестве критерия управления стволом скважины, чтобы оставаться в пределах продуктивной зоны. Более конкретно, если измеренная удельная электропроводность значительно отклоняется от удельной электропроводности продуктивной зоны, то это указывает, что ствол скважины приближается к границе раздела с вышележащим или нижележащим пластом грунта, или даже прошел эту границу. В качестве примера отметим, что удельная электропроводность нефтенасыщенного песка может быть значительно меньшей, чем удельная электропроводность типичных вышележащего и нижележащего сланцев. Указание, что удельная электропроводность около ствола скважины увеличивается,можно интерпретировать как означающее, что ствол скважины подходит к вышележащему или нижележащему слою пласта (в этом примере - к сланцу). Способ направленного бурения с использованием замера свойств пласта в качестве направляющего параметра для коррекции траектории обычно называют геоуправлением. Помимо ЭМ измерений для геоуправления также используют измерения акустических свойств и радиоактивности. Снова пользуясь примером нефтепродуктивной зоны с вышележащим и нижележащим сланцами, отметим, что естественная гамма-радиоактивность в продуктивной зоне обычно значительно ниже, чем естественная активность гамма-лучей сланцевых пластов, лежащих выше и ниже продуктивной зоны. В результате, увеличение измеряемой естественной активности гамма-лучей, получаемой из датчика гамма-лучей для КвПБ, будет свидетельствовать, что ствол скважины отклоняется от центра продуктивной зоны и приближается к поверхности раздела с вышележащим или нижележащим сланцем,или даже проходит ее.-2 007587 Если, как и в предыдущих примерах, удельная электропроводность и естественная радиоактивность вышележащего и нижележащего сланцевых пластов совпадают, то вышеописанные способы геоуправления показывают лишь то, что ствол скважины покидает продуктивную зону, но не показывают, выходит ли ствол скважины из продуктивной зоны через верх этой зоны или через низ этой зоны. Это создает затруднения для бурового оператора, который должен корректировать траекторию ствола скважины, поддерживая ее выбранное положение в продуктивной зоне. Приборы ЭМ индукционного каротажа весьма удобны для приложений, связанных с геоуправлением, потому что характерная для них поперечная (радиальная) глубина исследования за счет проникновения в пласты, окружающие скважину, является относительно большой, особенно - по сравнению с ядерными приборами. Возможность более глубокого радиального исследования позволяет индукционным приборам видеть на значительном поперечном (или радиальном) расстоянии от оси ствола скважины. В приложениях, связанных с геоуправлением, эта увеличенная глубина исследования обеспечивает обнаружение приближения к границам слоев пластов на более значительных поперечных расстояниях от ствола скважины, что дает буровому оператору дополнительное время для внесения любых необходимых поправок в траекторию. Обычные приборы на основе распространения ЭМ волн выполнены с возможностью разрешения осевых и поперечных (радиальных) изменений удельной электропроводности пластов, окружающих прибор, но характеристика этих приборов обычно не разрешает проводить азимутальные изменения удельной электропроводности пластов, окружающих прибор. Помимо этого, такие приборы не способны воспринимать анизотропию в вертикальных скважинах. Две экономически важных области отставания делают устранение этих недостатков более срочной проблемой. Первая область отставания связана с возрастающей потребностью в точном размещении скважин, которое требует проведения направленных измерений для принятия решений по управлению для оптимального размещения ствола скважины в коллекторе. Вторая область отставания связана с продуктивными зонами малого удельного сопротивления в слоистых пластах, где точная идентификация и характеристика запасов углеводородов невозможна без знания анизотропии удельного сопротивления. Во многих патентах, полученных за последние годы, описаны способы и устройства для проведения направленных измерений и получения анизотропии удельного сопротивления. Для приложений, связанных с каротажем во время бурения, в патенте США 5508616 на имя Sato и др., описан инструмент индукционного типа с двумя катушками, наклоненными в разных направлениях, не совпадающих с продольной осью инструмента. Направленность измерения иллюстрируется посредством простого утверждения,что функция чувствительности обеих наклоненных катушек нарастает в направлении к области перекрытия зон чувствительности каждой катушки. Указано, что посредством вращения инструмента можно получить изображение азимутального удельного сопротивления пласта на глубине. Однако, в этом патенте не раскрывается, как можно получить азимутальное удельное сопротивление, и не раскрыты никакие методы обнаружения и/или получения характеристик границ, необходимые для принятия количественного решения по геоуправлению. Патент США 6181138 на имя Hagiwara и Song, развивает идею Sato и др., связанную с одиночными катушками фиксированной направленности, воплощая ее в трех собранных в блок ортогональных индукционных катушках в местах нахождения передатчика и приемника. О необходимости вращения инструмента не говорится, поскольку направление фокусирования можно настраивать, придерживаясь произвольной ориентации, посредством комбинации откликов ортогональных катушек. Неясно, имеется ли экранирующая конструкция, которая обеспечит прохождение требуемых ЭМ составляющих без сильных неконтролируемых искажений сигнала в случае приложений, связанных с измерениями в процессе бурения. В патенте США 6297639 на имя Clark и др. и переуступленном обладателю прав на настоящее изобретение, описаны способы и устройства для проведения направленных измерений с использованием различных экранирующих конструкций для обеспечения избирательного затухания энергии ЭМ волн в случаях осевых, наклоненных и поперечных антенных катушек. В этом патенте, помимо прочих особенностей, описаны измерения посредством обычного направленного индукционного каротажа и каротажа на основе распространения ЭМ волн с помощью наклоненных катушек и соответствующих экранов, наряду с нетривиальным способом проведения компенсации ствола скважины при таких измерениях. Описана комбинация одной осевой передающей катушки и одной наклоненной приемной катушки, а также применение этой комбинации для обнаружения направлений границ пластов путем наблюдения азимутального изменения индуцируемого сигнала при вращении инструмента. Азимутальное изменение связи можно использовать для управления поворотом скважин в процессе бурения. С момента выдачи упомянутого патента выдано еще несколько патентов, связанных с экранирующими конструкциями, включая патент США 6351127 на имя Rosthal и др. и патент США 6566881 на имя Omeragic и др., причем оба эти патента переуступлены обладателю прав на настоящее изобретение. Патент США 6476609 на имя Bittar, развивает ранее выданный патент США 6163155, в котором предусматривается использование анизотропии и описываются как передатчики, так и приемники,возможно, имеющие некоторый угол наклона применительно к геоуправлению. Отклик пластов для устройства на основе индукции или распространения ЭМ волн, использующего катушки, наклоненные-3 007587 вверх и/или вниз, описывается посредством разности или отношения сигналов при двух разных ориентациях, но об экранировании не упоминается. Не описано и влияние анизотропии или падения пласта. Также ничего не сказано о том, как использовать эти измерения, чтобы получить точное расстояние до границы пласта. В патенте 6476609 явно предполагается, что ориентация пластов точно известна при вычислении отклика в направлении вверх и/или вниз. Однако, не предложен никакой способ установления точного направления вверх или вниз перед расчетом сигналов, направленных вверх или вниз. В публикации 2003/0085707 заявки на патент США на имя Minerbo и др. и переуступленной обладателю прав на настоящее изобретение, описаны конфигурации инструментов и способы симметризации, которые упрощают получение отклика направленных измерений до момента, когда этот отклик становится почти независимым от анизотропии или угла падения. Отклики на расстояние до границы пласта при разных падении и анизотропии, по существу, перекрываются, за исключением зоны около границы пласта. Для достижения этого упрощения можно симметризовать измерения в двух случаях - индукционного каротажа с помощью двух катушек (одного передатчика и одного приемника: ПЕ-ПР) и каротажа на основе распространения ЭМ волн с помощью трех катушек (одной передающей и двух приемных: ПЕ-ПР-ПР). Симметризацию проводят между двумя наклоненными парами ПЕ-ПР, расположенными в одном и том же промежутке, но при измененном угле наклона передающих катушек и измененном угле наклона приемных катушек. Рассматриваются только те случаи, когда магнитные моменты передающих и приемных катушек оказываются в одной и той же плоскости. Недостаток такого подхода заключается в том, что не удается обеспечить сигнал, необходимый для геоуправления, на протяжении всего времени скольжения, как в случае размещения скважин, при котором приходится учитывать наличие гидравлического забойного двигателя во время угловой коррекции траектории. Если магнитный момент инструмента оказывается параллельным наслоению во время скольжения, то генерируемый сигнал,направленный вверх или вниз, будет нулевым, независимо от расстояния до границы. Таким образом,оперативный контроль расстояния до границы оказывается невозможным. В публикации 2003/0200029 заявки на патент США на имя Omeragic и др. и тоже переуступленной обладателю прав на настоящее изобретение, описаны направленные измерения при каротаже на основе распространения ЭМ волн для определения анизотропии в почти вертикальных скважинах с компенсацией стволов скважин. Для получения показаний свойств анизотропных пластов также используют способы инверсии. В публикации 2003/0184302 заявки на патент США на имя Omeragic и Esmersoy и переуступленной обладателю прав на настоящее изобретение, также описаны способы прогнозирования в связи с направленными измерениями. В публикациях 2004/0046560 А 1 и 2004/0046561 А 1 заявок на патент США на имя Itzkovicz и др., описано использование квадрупольных антенн и связи индукционных измерений, проводимых с помощью поперечных симметричных вибраторных и квадрупольных антенн, имеющих аналогичные характеристики направленности, с откликом в плоскости XZ обычной поперечной вибраторной антенны. Практическая реализация таких антенн на металлической переходной муфте и их адекватное экранирование не раскрыты. Кроме того, влияние ствола скважины на такие измерения и взаимодействие и/или связь этого влияния с влиянием границ может отличаться от тех характеристик, которые получены путем измерения в плоскости XZ. Ни в одном из вышеупомянутых патентов не описано использование подробно охарактеризованных азимутальных откликов измеренного сигнала, или способы влияния на такие отклики. В этих документах также ничего не сказано о том, как применять измерение направления для определения расстояний до границ с целью использования при геоуправлении. Упоминается лишь так называемое измерение в направлении вверх или вниз, при котором получают разность измеряемого сигнала для случаев инструмента, сфокусированного непосредственно по направлению к некоторому слою пласта и от него. Точная информация о падении наслоения и азимуте обычно неизвестна до бурения и часто изменяется во время перспективных проработок ситуаций размещения скважин, при которых необходимо геоуправление. Воспользовавшись предварительно определенным направлением наслоения вверх или вниз, можно получить наименее искаженное измерение, что в худшем случае может привести лишь к неточным решениям по геоуправлению при внезапном изменении азимута наслоения. В принципе, возможно азимутальное регулирование измерений в скважине с помощью накопителей. Этот способ имеет ряд недостатков, включая затруднения при точном выравнивании верхнего и нижнего накопителей в соответствии с ориентацией слоев пласта и невозможность использовать данные, которые не находятся в верхнем и нижнем накопителях (т.е. потерю таких данных). В результате, требуется также большой объем памяти для записи азимутальных данных с достаточной точностью. Более важно то, что достигнутый уровень техники геоуправления посредством измерений направления обеспечивает возможность работы только при управлении поворотами вверх и вниз. Однако, возникает множество случаев, в которых приходится вносить азимутальные поправки в траекторию ствола скважины во избежание выхода из продуктивной зоны. Поэтому существует потребность в способах и методах обнаружения и анализа азимутальной зависимости направленных каротажных измерений с использованием замеров, получаемых при любых ази-4 007587 мутальных углах, для характеристики пласта грунта и для управления поворотом скважин во время бурения с повышенной точностью. Также существует потребность в определении азимута наслоения по результатам направленных измерений, а также генерирования замеров, которые можно использовать для размещения скважин при управлении поворотом скважин вверх, вниз или по азимуту. Также существует потребность в способах использования этих направленных измерений в реальном масштабе времени для получения расстояний до границ и для получения точных моделей грунта, при наличии которых можно принимать точные решения по геоуправлению при размещении скважин. Также существует потребность в способе обнаружения присутствия анизотропии удельного сопротивления в слоях пластов рядом с почти вертикальными скважинами. Кроме того, существует потребность в эффективной системе, которая обеспечивает такие направленные измерения, анализирует их по скважине и передает соответствующую информацию на поверхность для облегчения геоуправления вверх или вниз или по азимуту во время размещения скважин. Было бы также выгодно, если бы такая система могла выдавать информацию о расстоянии до границы во время фаз скольжения при бурении (т.е., когда бурильная колонна не вращается), а также в случае, когда система и/или инструмент вращается. Определения Определения некоторых терминов приводятся по всему тексту описания при их первом употреблении, а определения некоторых других терминов, употребляемых в этом описании, приведены ниже. Схождение означает условие, когда значения, получаемые в процессе итеративных вычислений,приближаются к наблюдаемым значениям или конечным пределам с увеличением количества циклов итерации. Кроссплот (график взаимной зависимости) означает график или построение такого графика, который показывает взаимную зависимость между двумя разными измерениями одного и того же объекта или выборки. Инверсия или инверсная означает получение модели (известной под названием инверсной модели) на основании измеренных данных (например, данных каротажа), которая описывает подземный пласт и согласуется с измеренными данными. Торец (торцевая поверхность) инструмента относится к угловой ориентации инструмента относительно его продольной оси и представляет угол, образованный между выбранной поверхностью отсчета на корпусе инструмента (например, на утяжеленной бурильной трубе) и либо стенкой ствола скважины, крайней сверху в соответствии с направлением силы тяжести, либо географическим севером. В том смысле, в каком он употребляется в данном описании, термин симметрия или симметричная относится к конфигурации, при которой наборы передающих и приемных устройств установлены в противоположных ориентациях вдоль продольной оси инструмента, так что эти наборы передатчиков и приемников можно коррелировать со стандартной симметричной операцией (например, переносом, отображением в зеркальной плоскости, инверсией и вращением) относительно точки на оси инструмента или плоскости симметрии, перпендикулярной оси инструмента. Краткое изложение сущности изобретения В одном аспекте, в настоящем изобретении предложен новый способ оперативной обработки данных для выделения сигналов на основании азимутального изменения направленного измерения, подходящих для характеристики пластов и использования в целях геоуправления. Вместо помещения данных каротажа в элементы памяти азимутальных измерений (накопители) и последующего определения значений, связанных с направлениями вверх и вниз, как это делается при традиционном отображении и предлагается другими исследователями, настоящее изобретение обладает преимуществом простоты физического представления отклика каротажа. Более конкретно, соответствующие сигналы, характеризующие границы, анизотропию и разрыв, выделяются из отклика пласта посредством аппроксимации азимутального изменения измеренных напряжений несколькими синусоидальными функциями. В результате этого также получается ориентация наслоений. Эта оперативная обработка повышает точность измерений, потому что используются данные, полученные во всех азимутальных направлениях или при любых азимутальных углах, а не осуществляется квантование в соответствии с конкретными углами. Такая объемная обработка становится возможной посредством целочисленных вычислений в цифровом процессоре сигналов (ЦПС), что также является новшеством в контексте рассматриваемой реализации. За счет выделения релевантных связей по напряжению в соответствии с их порядком азимутальной зависимости, в настоящем изобретении обеспечивается возможность вычислений замеров в режиме распространения ЭМ волн с помощью лишь одной пары передатчика и приемника. Это также допускает суперпозицию замеров, полученных с помощью разных пар ПЕ-ПР, даже имеющих разную азимутальную ориентацию, для генерирования других замеров с уникальным свойством, таких, как симметризованные или антисимметризованные замеры. В настоящем изобретении также предложена новая последовательность измерений для увеличения толерантности к неупорядоченному вращению, накоплению гармоник и даже скачкообразному перемещению. Используется быстрая последовательность операций, и эта последовательность рандомизируется-5 007587 в каждом цикле сбора данных для сокращения циклического просмотра при конкретных скоростях вращения. Следовательно, настоящее изобретение можно описать как способ получения характеристик подземного пласта, начинающийся этапом, на котором размещают подходящий каротажный прибор внутри ствола скважины. Этот каротажный прибор оснащен, по меньшей мере, первыми передающей и приемной антеннами, отстоящими на некоторое первое расстояние друг от друга. По меньшей мере, одна из первых антенн является щелевым симметричным вибратором, наклоненным относительно продольной оси прибора. Первые антенны ориентированы относительно оси каротажного прибора таким образом,что, по меньшей мере, один наклоненный щелевой симметричный вибратор соответствует первому азимутальному углу. Каротажный прибор выполнен с возможностью азимутального вращения внутри ствола скважины, например, посредством вращения утяжеленной бурильной трубы или инструмента, расположенного на бурильной колонне и содержащего прибор. Когда каротажный прибор вращается, включается первая передающая антенна для передачи электромагнитной энергии в пласт. Кроме того, при вращении каротажного прибора с помощью первой приемной антенны осуществляется направленное измерение группы первых сигналов напряжения, связанных с передаваемой электромагнитной энергией, в зависимости от азимутальной ориентации каротажного прибора. Эти направленные измерения определяют азимутальное изменение измеренных первых сигналов напряжения. Это азимутальное изменение подгоняется к аппроксимирующим функциям. Этапы включения, измерения и аппроксимации можно повторять для выполнения последующих циклов сбора данных. В конкретном варианте осуществления этап аппроксимации проводят во время измерения первых сигналов напряжения, и прекращают эту аппроксимацию, когда достигнуто схождение. Аппроксимирующие коэффициенты предпочтительно определяют с помощью быстрого преобразования Фурье. В конкретном варианте осуществления, аппроксимирующие функции являются синусоидами, определяемыми путем связывания компонентов векторов ориентации щелевого симметричного вибратора первой передающей антенны и первой приемной антенны. Коэффициенты аппроксимирующих составляющих предпочтительно являются функциями параметров пласта грунта, включая, по меньшей мере,один из таких параметров, как удельное сопротивление слоев пласта, место нахождения каротажного прибора, отклонение ствола скважины, азимутальный угол в месте нахождения каротажного прибора, а также их комбинацию. Аппроксимирующие коэффициенты преимущественно включают в себя постоянные, а также члены, содержащие sin, cos, sin2 и cos2, которые определяют итеративный алгоритм аппроксимации, используемый для определения азимутальной зависимости направленных измерений. Как упоминалось выше, настоящее изобретение можно приспособить к суперпозиции замеров, получаемых с помощью разных пар передатчиков и приемников (ПЕ-ПР). Поэтому в конкретном варианте осуществления каротажный прибор также оснащен вторыми передающей и приемной антеннами, отстоящими на первое расстояние друг от друга. Вторая передающая система представляет собой щелевой симметричный вибратор, наклон которого соответствует наклону первой приемной антенны, а вторая приемная антенна представляет собой щелевой симметричный вибратор, наклон которого соответствует наклону первой передающей антенны, так что по меньшей мере одна из вторых антенн представляет собой наклоненный щелевой симметричный вибратор. Вторые передающие и приемные антенны ориентированы относительно оси каротажного прибора таким образом, что, по меньшей мере, один наклоненный щелевой симметричный вибратор соответствует второму азимутальному углу. Таким образом, когда каротажный прибор вращается, включается вторая передающая антенна для передачи электромагнитной энергии в пласт, и с помощью второй приемной антенны осуществляется направленное измерение второй группы сигналов напряжения в зависимости от азимутальной ориентации каротажного прибора. Эти направленные измерения определяют азимутальное изменение измеренных вторых сигналов напряжения. Как и в случае измеренных первых сигналов напряжения, азимутальное изменение измеренных вторых сигналов напряжения подгоняется под аппроксимирующие функции. В конкретном варианте осуществления второй азимутальный угол отличается от первого азимутального угла, по существу, на 90. В альтернативном варианте, второй азимутальный угол может быть,по существу, равным первому азимутальному углу. В конкретном варианте осуществления, аппроксимирующие функции являются синусоидами, определяемыми путем связывания компонентов векторов ориентации щелевого симметричного вибратора первой передающей антенны и первой приемной антенны, а также путем связывания компонентов векторов ориентации щелевого симметричного вибратора второй передающей антенны и второй приемной антенны. Коэффициенты аппроксимирующих составляющих предпочтительно являются функциями таких параметров пласта грунта, как удельное сопротивление слоев пласта, место нахождения каротажного прибора, отклонение ствола скважины и азимутальный угол в месте нахождения каротажного прибора. Аппроксимирующие коэффициенты преимущественно включают в себя постоянные, а также члены, содержащие sin, cos, sin2 и cos2, которые определяют итеративный алгоритм аппроксимации, используемый для определения азимутальной зависимости направленных измерений. Измеренные первые и вторые сигналы напряжения предпочтительно являются комплексными сигналами напряжения. Соответ-6 007587 ственно, в этом конкретном варианте осуществления предлагаемый способ дополнительно включает в себя этапы, на которых вычисляют значения фазового сдвига и затухания на основании аппроксимирующих коэффициентов для измеренных первых и вторых сигналов напряжения, и объединяют вычисленные значения фазового сдвига и затухания для измеренных первых и вторых сигналов напряжения,формируя симметризованный или антисимметризованный замер. Значения фазового сдвига и затухания можно получать, беря логарифм отношения комплексных сигналов напряжения, получаемых из выражения аппроксимации, при двух азимутальных углах, предпочтительно - при азимутальных углах, которые составляют 0 и 180 от определенного азимута наслоения. В другом аспекте, в настоящем изобретении обеспечивается получение характеристик шума в направленных измерениях. Так, в конкретных вариантах осуществления, в которых лишь одна из первых антенн является наклоненным щелевым симметричным вибратором, можно определить характеристики шума измеренных первых и вторых сигналов напряжения с использованием коэффициентов гармоник второго порядка. В конкретных вариантах, в которых каждая из первых антенн является либо наклоненным, либо поперечным щелевым симметричным вибратором, а аппроксимирующие коэффициенты включают в себя коэффициенты гармоник третьего порядка, и можно определить характеристики шума измеренных первых и вторых сигналов напряжения с использованием коэффициентов гармоник третьего порядка. В других случаях, можно определить характеристики шума измеренных первых и вторых сигналов напряжения посредством объединения первых и вторых измеренных сигналов напряжения. Настоящее изобретение также можно приспособить к условиям, в которых каротажный прибор не вращается, например, во время остановки вращения бурильной колонны в процессе направленного бурения с использованием узла гидравлического забойного двигателя. При таких условиях, вторые антенны предпочтительно являются симметричными относительно первых антенн. Азимут интересующего слоя пласта определяют путем совместного использования связей первых и вторых антенн (описанных выше) и определения постоянных и коэффициентов гармоник первого порядка на основании первых и вторых сигналов напряжения, снятых, когда прибор не вращается. Определенные коэффициенты можно впоследствии использовать для выполнения этапа аппроксимации, когда прибор снова будет вращаться. В другом аспекте, в настоящем изобретении предложены способ и система для использования выделенных направленных сигналов с целью получения расстояний до границ и принятия решений по геоуправлению. Выделенные направленные сигналы используются для выделения расстояний до границы двумя способами. При простом сценарии с одной границей или с известным профилем удельного сопротивления пласта используют простой график взаимной зависимости (кроссплот), тогда, как при более сложных ситуациях, а также для построения соответствующих им структурных моделей, используют способы инверсии. Двумерный кроссплот охватывает измерения, чувствительные к удельному сопротивлению, и измерение, которое чувствительно к расстоянию, если удельное сопротивление уступа в месте искривления скважины известно. Альтернативой является использование кроссплота двух направленных измерений для определения расстояния и удельного сопротивления уступа в месте искривления скважины. Можно также генерировать трехмерный кроссплот для одной ситуации с границами, в которой можно определить каждый из таких параметров, как удельное сопротивление пласта, удельное сопротивление уступа в месте искривления скважины и расстояние до границы. При способе инверсии используют множество инвертируемых измерений для различных моделей и определения наилучшей аппроксимации. Инверсия может быть проведена внутри скважины или на поверхности. Частью системы визуализации информационной модели, а также результатов измерения и инверсии, является графический интерфейс пользователя (ГИП). ГИП облегчает интерактивное определение параметров инверсии, выбор измерений и моделей для улучшения интерпретации и генерирования удовлетворительных структурных моделей. Алгоритм итеративной аппроксимации предпочтительно включает в себя этапы, на которых выполняют следующие действия: инициализировать Р 0 и U0; для m = от 1 до N выборок где N выборок - суммарное количество выборок, полученных в одном цикле; М - размер вектора аппроксимирующих функций (количество аппроксимирующих функций);r - вектор значений аппроксимирующих функций в каждом положении измерения, имеющий размер М; и Р - матрица размером М х М. В одном варианте осуществления итеративный алгоритм аппроксимации обеспечивает определение того, меньше ли ошибка аппроксимации, чем предварительно определенное пороговое значение, и сходится ли U к значению, которое представляется аппроксимирующими коэффициентами. В одном варианте осуществления, в итеративном алгоритме аппроксимации используется целочисленная реализация. Целочисленная реализация предпочтительно используется тогда, когда каротажный прибор претерпевает азимутальное вращение с относительно большими скоростями и значительное количество каналов отклика требуют аппроксимацию. В одном варианте осуществления, аппроксимирующие коэффициенты используются для определения ориентации слоя пласта. Измеренные первые и вторые сигналы напряжения предпочтительно являются комплексными сигналами напряжения. Ориентация слоя пласта относительно опорного значения азимутального угла для каждого канала направленного измерения определяется в соответствии с формулой где C1s - действительная или мнимая часть коэффициента sin, a C1c - действительная или мнимая часть коэффициента cos из аппроксимирующего выражения. Общий азимутальный угол для первых и вторых сигналов напряжения можно вычислить с использованием взвешенного усреднения аппроксимирующих коэффициентов для действительных и мнимых частей измеренных сигналов напряжения. Амплитуду и фазу измеренного сигнала напряжения можно вычислить в предполагаемом направлении нормали к интересующей границе слоя. Фазовый сдвиг и затухание можно определить путем проведения измерений распространения для двух азимутальных углов, наприме, Фслоя и Фслоя+180 о. Сигналы, основанные на аппроксимирующих коэффициентах для первых и вторых измерений напряжения, предпочтительно объединяют, чтобы получить сигналы, необходимые для определения расстояния до интересующих границ слоев. Другие аспекты настоящего изобретения относятся к получению характеристик пластов посредством использования кроссплотов. Один способ включает в себя этап построения кроссплота двух направленных каротажных измерений, осуществляемых с помощью прибора, расположенного в стволе скважины, пересекающем пласт, для получения расстояния, по меньшей мере, до одной границы пласта и удельного сопротивления, по меньшей мере, одного слоя пласта. Построение кроссплота проводят с использованием модели с одной границей. Получаемое удельное сопротивление является удельным сопротивлением на границе раздела слой - уступ в месте искривления скважины, а полученное расстояние является наименьшим расстоянием до границы раздела слой - уступ в месте искривления скважины. Еще один способ включает в себя этап построения кроссплота удельного сопротивления и направленного измерения, определяемых с помощью прибора, расположенного в стволе скважины, пересекающем пласт, для получения расстояния по меньшей мере до одной границы пласта и удельного сопротивления по меньшей мере одного слоя пласта. Построение кроссплота проводят с использованием модели с одной границей. Получаемое удельное сопротивление является удельным сопротивлением на границе раздела слой - уступ в месте искривления скважины, а полученное расстояние является наименьшим расстоянием до границы раздела слой - уступ в месте искривления скважины. Другой способ включает в себя этап построения кроссплота удельного сопротивления и двух направленных каротажных измерений, осуществляемых с помощью прибора, расположенного в стволе скважины, пересекающем пласт, для получения расстояния по меньшей мере до одной границы пласта и удельного сопротивления по меньшей мере двух слоев пласта. Построение кроссплота проводят с использованием модели с одной границей. Получаемые удельные сопротивления являются удельными сопротивлениями слоя и границы раздела слой - уступ в месте искривления скважины, а полученное расстояние является наименьшим расстоянием до границы раздела слой - уступ в месте искривления скважины. Определенные расстояние до границы и удельное сопротивление слоя можно использовать для принятия решений по бурению. Еще один аспект настоящего изобретения относится к использованию способа инверсии для интерпретации направленных измерений в приложениях, связанных с геоуправлением. В данном случае используется итеративный алгоритм аппроксимации для выбранных направленных измерений в реальном масштабе времени, находящий применение при геоуправлении. Для выбранных направленных измерений в реальном масштабе времени выбирают подходящую инверсную модель. Сразу же после проверки выбранной модели на предмет согласования с другой информацией, эту модель используют для принятия решений по бурению.-8 007587 Этап выбора модели предпочтительно включает в себя просмотр совокупности моделей следующих типов: однородная изотропная (единственный параметр: удельное сопротивление); однородная анизотропная (два параметра: Rг и RВ); описывающая изотропный пласт с единственной границей, расположенной выше или ниже (три параметра: Rслоя, Rуступа и расстояние до границы); описывающая анизотропный пласт с единственной границей, расположенной выше или ниже (четыре параметра: Rслояг, Rслояв, Rуступа и расстояние до границы); описывающая три параметра изотропного пласта с двумя границами (пять параметров: Rcлoя,Rуступаввepxy, Rуступавнизу и расстояния до границ, расположенных выше и ниже инструмента); описывающая три параметра анизотропного пласта с двумя границами (шесть параметров: Rслояг,Rcлoяв, Rуступавверху, Rуступавнизу и расстояния до границ, расположенных выше и ниже инструмента). В предпочтительном варианте этап выбора модели дополнительно включает в себя визуализацию выбранных направленных измерений. В конкретном варианте осуществления, этап выбора модели предусматривает идентификацию известных параметров пласта, интерактивный выбор моделей, которые инвертируют выбранные направленные измерения, и выбор простейшей модели, которая аппроксимирует известную информацию. Этап проверки модели предусматривает сравнение выбранной модели с известными географическими характеристиками и другими параметрами пласта, а также обновление выбранной модели, если выбранная модель не согласуется с известной информацией. Этап обновления предусматривает уточнение выбранной модели на основании одной разновидности таких сведений, как тенденции, ранее накопленная информация, внешняя информация, а также их комбинация. Выбирают подходящие параметры инверсии и определяют диапазоны для выбранных параметров. Инверсную модель предпочтительно обновляют путем добавления большего количества слоев пластов. Некоторые из направленных измерений в реальном масштабе времени можно повторно взвешивать или исключать, а оставшиеся направленные измерения в реальном масштабе времени можно повторно инвертировать в обновленную модель. Способы построения графиков взаимной зависимости (кроссплотов) в соответствии с настоящим изобретением предпочтительно предусматривают определение подходящей модели, выбор подходящих направленных измерений, ввод выбранных измерений в определенную модель для построения кроссплота, и создание визуального представления кроссплота. Кроссплот можно обновлять с помощью последующих измерений в реальном масштабе времени. Еще один аспект настоящего изобретения относится к системе для измерения характеристик пластов грунта, окружающих ствол скважины. Это устройство включает в себя каротажный прибор, выполненный с возможностью размещения внутри ствола скважины. Этот каротажный прибор имеет продольную ось и оснащен парами первых и вторых передающих и приемных антенн. Пара первых передающей и приемной антенн включает в себя первую передающую антенну, представляющую собой щелевой симметричный вибратор, ориентированный в первом направлении относительно продольной оси каротажного прибора, и первую приемную антенну, находящуюся на первом расстоянии от первой передающей антенны и представляющую собой щелевой симметричный вибратор, ориентированный во втором направлении, причем первое и второе направления являются разными. Щелевые симметричные вибраторы первых передающей и приемной антенн определяют плоскость, в которой лежит продольная ось каротажного прибора. Пара вторых передающей и приемной антенн включает в себя вторую передающую антенну, представляющую собой щелевой симметричный вибратор, ориентированный во втором направлении относительно продольной оси каротажного прибора, и вторую приемную антенну, находящуюся на первом расстоянии от второй передающей антенны и представляющую собой щелевой симметричный вибратор, ориентированный в первом направлении. Щелевые симметричные вибраторы вторых передающей и приемной антенн определяют плоскость, в которой лежит продольная ось каротажного прибора. Устройство также включает в себя датчик угла торца инструмента для непрерывной индикации азимутальной ориентации каротажного прибора, а также контроллер для управления парами первых и вторых передающих и приемных антенн, обеспечивающий избирательную передачу электромагнитной энергии в пласт и измерение сигналов напряжения, связанных с передаваемой электромагнитной энергией в функции азимутальной ориентации каротажного прибора. В конкретном варианте осуществления, пары вторых передающей и приемной антенн ориентированы под первым азимутальным углом (например, 90) относительно пар первых передающей и приемной антенн вокруг продольной оси каротажного прибора. В различных конкретных вариантах осуществления, измеряемые информационные характеристики включают в себя удельное сопротивление, а также информацию о геометрии пластов грунта, такую как падение, азимут и толщина слоя.-9 007587 Первое и второе направления изменяются и могут оказаться, например, по существу коллинеарными с продольной осью каротажного прибора, или образующими угол, по существу, 45 от продольной оси каротажного прибора. В конкретном варианте осуществления, пары первых и вторых передающих и приемных антенн находятся в одних и тех же физических положениях на каротажном приборе. В конкретном варианте осуществления каждый из передатчиков и приемников обладает функциональными возможностями приемопередатчика. Датчик угла торца инструмента может предусматривать наличие магнетометров для индикации азимутальной ориентации каротажного прибора относительно земного магнитного севера, или гравитационные датчики для индикации азимутальной ориентации каротажного прибора относительно вектора силы земного притяжения. Предлагаемое устройство предпочтительно включает в себя центральный процессор (ЦП) для обработки измеренных сигналов напряжения внутри ствола скважины, телеметрическое устройство для передачи измеренных сигналов и результатов обработки посредством ЦП из ствола скважины на поверхность, и расположенную на поверхности систему для дальнейшей обработки измеренных сигналов наряду с другими замерами для генерирования и отображения выбранных параметров согласованной модели грунта. Краткое описание чертежей Вышеизложенные признаки и преимущества настоящего изобретения поясняются ниже в подробном описании изобретения, кратко охарактеризованного выше, со ссылками на конкретные варианты его осуществления, проиллюстрированные на прилагаемых чертежах. Однако, следует отметить, что прилагаемые чертежи иллюстрируют лишь типичные варианты осуществления этого изобретения, так что не следует считать их ограничивающими объем его притязаний, поскольку изобретение может допускать другие, столь же эффективные варианты осуществления. На фиг. 1 показаны условные изображения известных инструментов для индукционного каротажа или каротажа на основе распространения ЭМ волн. На фиг. 2 А и 2 В - проекции, иллюстрирующие вихревые токи, индуцируемые каротажным инструментом в стволе скважины, пронизывающем пласт, при наличии и отсутствии относительного падения,соответственно. На фиг. 3 - представление в виде вертикальной проекции обычной вращающейся бурильной колонны, в которой можно с выгодой применить настоящее изобретение. На фиг. 4 - условное представление базового инструмента для направленных измерений, имеющего симметричные пары передающих и приемных антенн. На фиг. 5 А - условное представление инструмента для направленных измерений, имеющего конфигурацию передатчик - приемник - приемник (ПЕ-ПР-ПР), которая не чувствительна к анизотропии при любом угле падения, в соответствии с одним аспектом настоящего изобретения. На фиг. 5 В показаны графики отклика направленного распространения для трехслойного пласта,полученные с помощью каротажного инструмента, соответствующего фиг. 5 А. На фиг. 6 - графическое представление способа накопления и способа оперативной аппроксимации в соответствии с одним аспектом настоящего изобретения. На фиг. 7 - графики, представляющие схождение и ошибку в наборе целевых коэффициентов, получаемые способом аппроксимации в соответствии с одним аспектом настоящего изобретения, реализуемым посредством целочисленного алгоритма в цифровом процессоре сигналов в соответствии с другим аспектом настоящего изобретения. На фиг. 8 - кроссплот, представляющий преобразованное измерение удельной электропроводности и направленное измерение, используемые для получения удельной электропроводности слоя пласта и расстояния до границ слоя при известном сопротивлении на границе раздела слой - уступ в месте искривления скважины. На фиг. 9 - результаты применения способа инверсии для получения удельного сопротивления и поточечного построения пограничных мест слоя пласта. На фиг. 10 проиллюстрирован способ инверсии на основе кроссплота применительно к интерпретации направленных измерений удельного сопротивления. На фиг. 11 представлена схема последовательности рабочих операций геоуправления в соответствии с одним аспектом настоящего изобретения. На фиг. 12 - схема последовательности рабочих операций построения кроссплота, используемого для определения расстояний до границ слоев и применения таких расстояний при геоуправлении в реальном масштабе времени в соответствии с другими аспектами настоящего изобретения. На фиг. 13 - блок-схема, представляющая структуру графического интерфейса пользователя (ГИП) для отображения моделей слоев пласта, построенных на основе инверсии. На фиг. 14 - генерируемая компьютером визуализация инверсии геоуправления, связанная с ГИП,показанным на фиг. 13.- 10007587 Подробное описание изобретения На фиг. 3 изображена обычная буровая установка и бурильная колонна, в которой можно с выгодой применить настоящее изобретение. Агрегат 10 наземной платформы и буровой вышки расположен над стволом 11 скважины, пронизывающим подземный пласт П. В изображенном варианте осуществления,ствол 11 скважины образован путем вращательного (роторного) бурения хорошо известным способом. Вместе с тем, специалистам в данной области техники, на основе информации из данного описания,должно быть понятно, что настоящее изобретение также находит такое же применение в приложениях,связанных с направленным бурением, как и в приложениях, связанных с вращательным бурением, и не ограничивается применением наземных буровых установок. Внутри ствола 11 скважины подвешена бурильная колонна 12, которая включает в себя буровое долото 15, расположенное на ее нижнем конце. Вращение бурильной колонны 12 осуществляется посредством роторного стола 16, электропитание на который подают средства, не показанные на чертеже, и который сочленен с ведущей бурильной трубой 17, находящейся на верхнем конце бурильной колонны. Бурильная колонна 12 свешена с крюка 18, прикрепленного к перемещаемому блоку (не показан) через посредство ведущей бурильной трубы 17 и вращательного вертлюга 19, который обеспечивает вращение бурильной колонны относительно крюка. Буровой раствор или глинистый раствор 26 хранится в колодце 27, вырытом на буровой площадке. Насос 29 подает буровой раствор 26 внутрь бурильной колонны 12 через отверстие в вертлюге 19, вынуждая протекание бурового раствора вниз по бурильной колонне 12, как показано направленной стрелкой 9. Буровой раствор выходит из бурильной колонны 12 через отверстия в буровом долоте 15, а затем циркулирует вверх через область между внешней стороной бурильной колонны и стенкой ствола скважины,называемую кольцевым пространством, как показано направленными стрелками 32. Таким образом, буровой раствор смазывает буровое долото 15 и переносит обломки выбуренной породы на поверхность,где возвращается в колодец 27 для рециркуляции. Бурильная колонна 12 также включает в себя забойный узел, обозначенный как единое целое позицией 34 и находящийся около бурового долота 15 (иными словами, в пределах нескольких секций утяжеленной бурильной трубы от бурового долота). Забойный узел обладает функциональными возможностями измерения, обработки и хранения информации, а также осуществления связи с поверхностью. Забойный узел 34, который включает в себя, помимо прочих компонентов, устройство 36 для измерения и локальной связи, предназначенное для определения и передачи данных удельного сопротивления пласта П,окружающего ствол 11 скважины. Устройство 36 связи, также известное под названием инструмент для каротажа по методу сопротивления, включает в себя пару первых передающей и приемной антенн ПЕ,ПР, а также пару вторых передающей и приемной антенн ПЕ', ПР' . Пара вторых антенн ПЕ', ПР' симметрична относительно пары первых антенн ПЕ, ПР, как подробнее описано ниже. Инструмент 36 для каротажа по методу сопротивления также включает в себя контроллер для управления сбором данных, как известно в данной области техники. Забойный узел (ЗУ) 34 также включает в себя приборы, заключенные внутри утяжеленных бурильных труб 38, 39, для выполнения различных других измерительных функций, таких, как измерение естественной радиации, плотности (посредством гамма- или нейтронного каротажа) и порового давления пласта П. По меньшей мере, некоторые из утяжеленных бурильных труб оснащены стабилизаторами 37,как известно в данной области техники. ЗУ 34 также включает в себя субузел 40 связи с поверхностью и локальной связи, расположенный как раз над утяжеленной бурильной трубой 39. Подузел 40 включает в себя тороидальную антенну 42,используемую для локальной связи с инструментом 36 для каротажа по методу сопротивления (хотя, для этого с выгодой могут быть использованы и другие известные средства локальной связи), и акустическую телеметрическую систему известного типа, осуществляющую связь с аналогичной системой (не показана) на поверхности Земли посредством сигналов, передаваемых в буровом растворе или глинистом растворе. Таким образом, телеметрическая система в субузле 40 включает в себя акустический передатчик, который генерирует в буровом растворе акустический сигнал (известный под названием импульс бурового раствора), отображающий измеряемые скважинные параметры. Генерируемый акустический сигнал передается на поверхность измерительными преобразователями, обозначенными позицией 31. Измерительные преобразователи, например - пьезоэлектрические измерительные преобразователи, преобразуют принимаемые электрические сигналы в электронные сигналы. Выход измерительных преобразователей 31 подключен к наземной принимающей подсистеме 90, которая демодулирует переданные сигналы. Далее, выход принимающей подсистемы 90 подключен к процессору 85 компьютера и регистрирующему прибору 45. Процессор 85 можно использовать для определения профиля удельного сопротивления пласта (помимо прочих характеристик) в реальном масштабе времени во время каротажа или после него посредством осуществления доступа к зарегистрированным данным из регистрирующего прибора 45. Процессор компьютера подключен к монитору 92, в котором используется графический интерфейс пользователя (ГИП), посредством которого измеренные скважинные параметры и конкретные результаты, полученные на их основании (например, профили удельного сопротивления), предоставляются пользователю в графической форме.- 11007587 Предусмотрена также наземная передающая подсистема 95 для приема команд, вводимых пользователем (например, посредством ГИП в мониторе 92), выполненная с возможностью избирательного прерывания работы насоса 29 так, как предписывают измерительные преобразователи 99 в субузле 40. Следовательно, между субузлом 40 и наземным оборудованием осуществляется двухсторонняя связь. Подходящий субузел 40 более подробно описан в патентах США 5235285 и 5517464, причем оба они переуступлены обладателю прав на настоящее изобретение. Специалистам в данной области техники должно быть понятно, что для осуществления связи с поверхностью можно применять альтернативные акустические способы, а также другие телеметрические средства (например, электромеханические и электромагнитные). Азимутальная зависимость направленного измерения и новый эквивалент каротажа на основе распространения ЭМ волн Для реализации измерений с направленной чувствительностью используют катушечные антенны двух типов. В антеннах одного типа присущая им направленная чувствительность достигается либо за счет сдвига антенн, например, от центра продольной оси каротажного инструмента, либо за счет их частичного складывания. Направленные измерения также можно проводить с помощью антенны, конфигурация которой такова, что ее магнитный момент не ориентирован вдоль продольной оси инструмента, на котором установлена антенна. Настоящее изобретение связано с направленно чувствительной антенной второго типа. На фиг. 4 условно изображен базовый инструмент 36 для каротажа по методу сопротивления с целью направленного измерения посредством электромагнитной (ЭМ) волны. Инструмент 36 включает в себя передающую антенну ПЕ, которая излучает ЭМ волну некоторой частоты f, и приемную антенну ПР, находящуюся на некотором расстоянии L от передающей антенны. Также показана симметричная пара (ПЕ', ПР'), соответствующая положениям публикации 2003/0085707 заявки на патент США(Minerbo и др.), переуступленной обладателю прав на настоящее изобретение. Для ясности и простоты,нижеследующие рассуждения будут ограничены передающей антенной ПЕ и приемной антенной ПР,хотя они применимы и к симметричной паре антенн ПЕ' , ПР' . Следует отметить, что, хотя наклоненные моменты обеих симметричных пар находятся в одной и той же плоскости, как показано на фиг. 4, это не является обязательным признаком настоящего изобретения. Как очевидно из нижеследующего описания,для достижения эквивалентных результатов можно также ввести сигналы из обеих пар, моменты которых лежат в разных плоскостях, если на операции симметризации используются выделенные коэффициенты или направленный фазовый сдвиг или направленное затухание. В процессе работы приемная антенна ПР регистрирует напряжение VПР-ПЕ, индуцируемое ЭМ волной от передающей антенны ПЕ и ее вторичными токами, генерируемыми в пласте, пронизываемом стволом скважины, содержащим каротажный прибор 36. Обе антенны - ПЕ и ПР - закреплены на инструменте 36 и поэтому вращаются вместе с инструментом. Можно предположить, что ориентации антенн соответствуют углу ПЕ для передающей антенны ПЕ и ПР для приемной антенны ПР. Тогда азимутальное изменение напряжения связи во время вращения инструмента может быть выражено членами связи в декартовых координатах щелевых симметричных вибраторов следующим образом: где набор комплексных коэффициентов С 0, C1c, C1s, С 2 с, C2s определяется таким образом, что они представляют амплитуды разных составляющих измеренного отклика пласта. Следовательно, комплексные коэффициенты определяются таким образом: В соответствии с одним аспектом настоящего изобретения предполагается, что эти коэффициенты являются функциями удельного сопротивления пласта, отклонения ствола скважины и азимутального угла в месте нахождения инструмента. При операции симметризации, т.е. (ПЕПР) происходит упрощение уравнений (1.1), принимающих следующий вид: Все гармоники второго порядка (С 2c, С 2s) исчезают после вычитания, потому что они симметричны относительно изменения углов наклона передатчиков и приемников. Таким образом, симметризация упрощает азимутальное изменение антисимметризованного сигнала. На этой стадии точка отсчета азимутального угла является произвольной. Применительно к плоской геометрии, если мы выберем точку отсчета углана направлении нормали к плоскости наслоения,то будем иметь Vyz=Vzy=0 в результате симметрии, а функция Vдолжна зависеть только от cos. В реальном приложении, ориентация наслоения неизвестна. Однако, задавшись любой плоскостью отсчета,можно вычислить ориентацию наслоения по формуле При повороте на угол наслоения, вектор х будет направлен по нормали к наслоению, поэтому величи на Vбудет точно равна [Vxz-Vzx], за исключением постоянного множителя 2sin (ПЕ-ПР) . Сразу же после определения напряжения в каждой приемной катушке, индуцируемого каждой из передающих катушек, можно определить общий замер путем суммирования напряжений в случае индукционного инструмента или путем получения комплексного отношения напряжений в случае инструмента для каротажа на основе распространения ЭМ волн. Например, в случае показанного на фиг. 4 устройства для каротажа на основе распространения ЭМ волн, абсолютное значение напряжения в каждом приемнике можно получить в виде корня квадратного из суммы квадратов действительных и мнимых частей комплексного напряжения (выражаемого уравнением 1.1), а отношение абсолютных значений дает затухание, на основании которого можно получить удельное сопротивление Rзатух в функции затухания(удельное сопротивление пластов на относительно большой глубине исследования вокруг приемников). Фазу для каждого приемника получают, находя арктангенс отношения действительной и мнимой частей комплексного напряжения, а фазовый сдвиг представляет собой разность фаз между двумя приемниками. В таком случае, можно получить удельное сопротивление Rфс в функции фазового сдвига (удельное сопротивление пластов на относительно небольшой глубине исследования вокруг приемников). В случае измерений посредством каротажа на основе распространения ЭМ волн находят разность(или отношение) логарифмических значений напряжений между двумя измерениями. В соответствии с теоретическими положениями, приведенными в патенте Minerbo и др., находим амплитуду азимутального отклика, т.е. разность значений фазового сдвига и затухания при измерении под угламии (+180) ,оцениваемую на максимуме отклика по напряжению. Это приводит к следующему приближенному уравнению, выведенному из уравнений (1.1-1.2): Максимум величины V достигается при =0, если вектор х выбран вдоль направления нормали к наслоению. Если проводить оценку при угле =0, то уравнение (1.5) дает Однако, это не чистый xz-zx тип откликов, которые желательны, т.е. которые нечувствительны к анизотропии наслоений и углу падения. Настоящее изобретение относится к направленным измерениям, которые нечувствительны к анизотропии пласта в широком диапазоне углов падения и в широком диапазоне частот. Как упоминалось выше, конкретные варианты осуществления изобретения основаны на антисимметризованных конфигурациях или системах антенн. Теперь, при проведении процедуры симметризации (ПЕПР), описанной Это выражение вновь подобно отклику прибора индукционного типа, хотя в знаменателе попрежнему есть члены, которые не представляют простой тип [xz-zx]. Это доказывает, что процедура симметризации для измерения посредством каротажа на основе распространения ЭМ волн может давать отклики, аналогичные откликам в случае симметризованного измерения посредством индукционного каротажа, но - не чистого типа. Также справедливо утверждение, что измерение посредством каротажа на основе распространения ЭМ волн можно проводить при двух произвольных ориентациях в азимутальном отклике. Окончательный отклик, получаемый при этом анализе, содержит составляющие, полученные вследствие двух разных типов связей, которые на первый взгляд кажутся нежелательными в свете обычных методов каротажа. Однако, этот отклик позволяет осуществить усовершенствованный способ измерения посредством каротажа на основе распространения ЭМ волн, который прост и значительно ближе к индукционному каротажу. Предлагаемое направленное измерение реализуется за счет того, что разные типы связей естественно разделяются на разные азимутальные зависимости. Для проведения более чистого направленного измерения используются коэффициенты С 0, C1c, C1s. Можно предположить значение наслоен некоторой определенной ориентации наслоения с помощьюуравнения (1.4), так что все углыи x, y упоминаются в связи с этим направлением. В этом случае уравнение (1.1) упрощается, принимая следующий вид: Тогда измерение посредством каротажа на основе распространения ЭМ волн можно просто охарактеризовать следующим образом: Теперь, после симметризации первого выражения, получаем которое лишь незначительно отличается от уравнения (1.7). Таким образом, в случае двухкатушечных (ПЕ-ПР) измерений при обоих типах каротажа - индукционном и основанном на распространении ЭМ волн - нужно проводить анализ разных составляющих на уровне напряжения VПР-ПЕ . Это дает точные поведения членов, содержащих sin, cos, sin2, cos2,которые можно выделить с помощью нового алгоритма обработки, описанного в следующем разделе. И вновь, следует отметить, что если либо ПЕ=0, либо ПР=0, то оба члена, содержащие sin2 иcos2, исчезают. Зависимость напряжения основана лишь на членах, содержащих sin и cos. Один важный аспект измерений фазового сдвига и затухания посредством каротажа на основе распространения ЭМ волн заключается в том, что они естественным образом подходят в качестве измерений в процессе бурения, во время которых трудно получить подробные характеристики теплового дрейфа электронной аппаратуры в скважинных условиях. Направленные измерения фазового сдвига и затухания, о которых идет речь в данном описании, дают преимущество обычного инструмента для каротажа на основе распространения ЭМ волн по методу сопротивления с компенсацией в стволе скважины, заключающееся в том, что характеристики приемной антенны и передающей антенны и дрейф электронных компонентов приемника не оказывают влияние на измерение. Следует также отметить, что в этом изобретении процесс симметризации осуществляется с выделенными коэффициентами, которые можно обрабатывать независимо от реального относительного азимута обеих пар ПЕ-ПР. Если ориентация пары ПЕ-ПР физически изменяется посредством вращения на некоторый дополнительный угол 0 вокруг оси инструмента, то отклик описывается точно тем же выражением, за исключением следующей замены угла :+0. Это имеет важные последствия для реальных конфигураций катушек. За счет использования двух пар ПЕ-ПР с разными азимутальными ориентациями для измерений, процесс симметризации в случае вращения можно осуществлять точно так же, как в случае, если бы обе пары находились в одной и той же плоскости. Вместе с тем, когда инструмент скользит, измеренный сигнал, полученный при наличии двух ориентации, можно использовать для построения требуемых направленных измерений, просто предполагая, что азимут инструмента и наслоения не изменился с последнего момента, когда инструмент еще вращался. Таким образом, можно использовать уравнение 1.3 для получения амплитуд C1c и C1s, необходимых для построения измерений посредством каротажа на основе распространения ЭМ волн. Эти анализы можно без изменения распространить на традиционный тип измерений с помощью конфигураций ПЕ-ПР-ПР, описанных Minerbo и др. Специалистам в данной области техники должно быть очевидно, что эта процедура дает, по существу, такой же отклик, как указанный выше, но с удвоением сигнала, поскольку промежуток в паре приемных антенн значительно меньше по сравнению с промежутком в паре ПЕ-ПР. Направленные сигналы из двух приемных антенн просто складываются. На фиг. 5 А показана конфигурация ПЕ-ПР-ПР, которая нечувствительна к анизотропии при любом угле падения, а на фиг. 5 В показаны отклики, соответствующие этой конфигурации. Осуществляется подача электропитания на передающую антенну ПЕ 1 и измерение фазового сдвига и затухания, обуславливаемых приемными антеннами ПР 11 и ПР 12. Затем осуществляется подача электропитания на пере- 15007587 дающую антенну ПЕ 2 и измерение фазового сдвига и затухания, обуславливаемых приемными антеннами ПР 21 и ПР 22. Показание инструмента соответствует разностям между этими двумя наборами замеров. Поскольку отдельные замеры в однородной среде идентичны при любом угле и при любой анизотропии, показание инструмента является нулевым в однородной среде при любом падении. Отклики измерений в трехслойном анизотропном пласте показаны на фиг. 5 В. Показание инструмента является нулевым на расстоянии от границы при любом падении, и имеет место незначительная чувствительность к анизотропии вблизи границы. Различие откликов возникает вследствие того, что отклики распространения окажутся не симметричными, если поменять местами передатчик и приемник. Проведение измерений в направлениях вверх и вниз предусматривает получение только информации в этих направлениях, даже вблизи границы. Следует отметить, что отклики затухания практически перекрываются для разных углов падений, если все антенны находятся в одной и той же среде, что просто идеально для индукционного измерения типа xz-zx (описанного выше). Измерения фазового сдвига также перекрываются, хотя отклики в проводящем слое (1 См/м) удваиваются. Алгоритмы цифрового процессора сигналов (ЦПС) для выделения сигнала на основании азимутальной зависимости Из предыдущего анализа очевидно, что наилучший способ выделения направленных измерений заключается в анализе сигналов напряжения и выделении подходящих измерений с последующим их синтезом и симметризацией для конечного использования при проведении геоуправления. Традиционный способ обработки азимутальных данных заключается в помещении их в малые элементы памяти (накопители), соответствующие одинаковому азимутальному диапазону (см. левую часть фиг. 6), как делалось со скважинными изображениями удельного сопротивления или плотности. Затем можно идентифицировать верхний и нижний накопители, определяя местонахождение максимального и минимального значений. Однако этот метод имеет следующие недостатки: 1. Накопление снижает угловое разрешение измерения; 2. Накопление приводит к потере данных, поскольку данные, не попадающие ни в один из верхнего и нижнего накопителей, не используются для вычисления расстояния до границы; 3. В случаях заедания и скольжения накопление неинформативно, вследствие чего верхний и нижний накопители могут быть пустыми или иметь малые выборки, что обуславливает ошибку в измерениях в направлениях вверх и вниз и, возможно, неправильную идентификацию пиковых значений в наихудшем случае; 4. Накопление занимает больше памяти. Один аспект настоящего изобретения имеет принципиальное отношение к определению коэффициентов членов, содержащих sin, cos, sin2 и cos2, которые определяют новый алгоритм, используемый вместо обычного накопления. Этот предлагаемый метод называется оперативной аппроксимацией азимутального отклика в соответствии с выделениями подходящих членов, содержащих sin и cos, для направленных измерений, причем эта аппроксимация проводится итеративно (см. построенные точки на фиг. 9) . Такой алгоритм аппроксимации реализуется в ЦПС посредством целочисленного алгоритма, так что он достаточно быстро выполняется для всех каналов в пределах времени выборки, составляющего 4 мс. Точное использование информации об азимутальных углах и рандомизация последовательностей сбора данных делают этот алгоритм робастным к допустимому неравномерному вращению инструмента,а также к заеданию и скольжению в тяжелых условиях бурения. Таким образом, для получения сигнала в направлении вверх или вниз, используются все данные, а не только данные в обоих накопителях, что увеличивает отношение сигнал - шум при измерении. Использование точных углов азимута также позволяет точнее определять ориентацию наслоения. Подробный алгоритм можно описать следующим образом. Реализация в режиме с плавающей запятой: начинают с начального значения матрицы Р 0 и вектораU0, затем выполняют алгоритм, описанный ниже (который также представлен графически в правой части фиг. 6), с измерением y(i) и базисом r = (1 sini, cosi, sin2i, cos2i)T, где Р - матрица размером МхМ, aU и r - векторы размером М. М - это размер базисной функции. После итерации по N U будет сходиться к значению, которое представляет коэффициенты выражения. Этот алгоритм устойчив, так что сходимость обычно достигается за 10-15 итераций. Подробный алгоритм показан ниже: инициализировать Р 0 и U0; для m = от 1 до N выборок- 16007587 где N выборок - суммарное количество выборок, полученных в одном цикле; М - размер вектора аппроксимирующих функций (количество аппроксимирующих функций);r - вектор значений аппроксимирующих функций в каждом положении измерения, имеющий размер М; и Р - матрица размером М х М. Целочисленные алгоритмы в ЦПС Во многих случаях, реализация в режиме с плавающей запятой будет слишком дорогостоящей, чтобы ее можно было осуществить в доступных в настоящее время скважинных ЦП, потому что может потребоваться аппроксимация по сотням каналов, а сбор данных для каждого азимутального угла придется проводить за довольно короткое время (исчисляемое миллисекундами), чтобы получить точный угол на повышенной скорости вращения. В этой ситуации можно применить целочисленную реализацию, несколько модифицировав ее, чтобы повысить точность (например, можно использовать 32 разряда для умножения), провести масштабирование и избежать переполнения, а также ускорить сходимость. Значения базисной функции также можно генерировать заранее и хранить в памяти, чтобы позже интерполировать их для получения значения истинного угла i. В целом, целочисленные алгоритмы основаны на 16-разрядном целочисленном представлении данных с 32-разрядными целочисленными промежуточными переменными; более эффективны, но менее точны; приспособляемы к стратегиям повышения точности и скорости сходимости: масштабированию,инициализации и повторной инициализации; приспособляемы к стратегиям, которые в свою очередь приспособлены к среде ЦПС: делению, округлению. Протекание процесса сходимости для целочисленной версии алгоритма показано на фиг. 7. Следует отметить, что аппроксимация является довольно точной, а ошибки в общем случае составляют менее 1%. Очень важным моментом аппроксимации является то, что почти все данные используются для получения коэффициентов (сигналов направленного измерения), что значительно увеличивает отношение сигнал шум. Например, если используются только 32 элемента памяти (накопителя), то при реализации от верхнего до нижнего накопителей используется лишь 1/16 часть данных. В отличие от этого, при использовании оперативной аппроксимации учитываются почти все данные (помимо части первоначальной сходимости). Поскольку при осуществлении метода аппроксимации (описанного выше) выделяются только релевантные сигналы, нужно сохранять только полезные коэффициенты. Так, в этом случае нужно сохранять только 5 коэффициентов по сравнению с 32 в случае, если бы накапливались все данные в варианте с 32 накопителями. Специалистам в данной области техники должны быть понятны преимущества предлагаемого метода, которые включают в себя точность выделенного сигнала и конкретное увеличение точности азимутального угла. В еще одном аспекте, изобретение обеспечивает получение характеристик шума при направленных измерениях. Так, в конкретных вариантах осуществления, в которых только пара первых антенн (ПЕПР) представляет собой наклоненный щелевой симметричный вибратор, характеристики шума измеряемых сигналов напряжения можно получить с использованием коэффициентов гармоник второго порядка. В вариантах осуществления, в которых каждая из первых антенн представляет собой наклоненный либо поперечный щелевой симметричный вибратор, а аппроксимирующие коэффициенты включают в себя коэффициенты гармоник третьего порядка, шум измеряемых сигналов напряжения можно охарактеризовать коэффициентами гармоник третьего порядка. В других случаях шум измеряемых сигналов напряжения можно охарактеризовать путем объединения упомянутых сигналов. Настоящее изобретение также можно приспособить к условиям, в которых каротажный прибор не вращается, например, таким, которые возникают при остановке вращения бурильной колонны, когда направленное бурение проводится с помощью узла гидравлического забойного двигателя. При таких условиях пара вторых антенн (ПЕ'-ПР') предпочтительно симметрична относительно первой пары антенн. Азимут интересующего слоя пласта определяют путем объединения этих связей антенн (как описано выше) и определения постоянных коэффициентов и коэффициентов гармоник первого порядка измеренных сигналов напряжения, получаемых, когда прибор не вращается. Определенные коэффициенты затем используют для проведения итеративной аппроксимации, когда каротажный прибор снова вращается. Расстояние до границы, используемое при геоуправлении В соответствии с еще одним аспектом настоящего изобретения, определенные коэффициенты можно использовать для получения ориентации наслоения пласта. Ориентацию наслоения для каждого канала направленных измерений можно определить с помощью уравнения 1.4. Кроме того, можно отметить,что среднее значение для многих каналов, взвешенное посредством функции относительного уровня сигнала каждого канала, который содержит замер, также можно использовать для повышения точности,- 17007587 поскольку эта ориентация должна быть одинаковой для всех каналов. Тогда можно вычислить амплитуду и фазу сигнала напряжения, VПР-ПЕ (наслоен) в предполагаемом направлении нормали к слою. Направленный фазовый сдвиг и затухание можно вычислить с помощью уравнения 1.10. Затем,симметризацию осуществляют с целью получения конечного сигнала, необходимого для нахождения расстояния до границы. Вместе с тем, следует понять, что порядок проведения этих этапов можно изменять, получая при этом аналогичные или идентичные отклики. Чтобы получить расстояние до границы в реальном масштабе времени, можно использовать два способа. В случае простых моделей (где есть только одна граница), кроссплот двух направленных измерений позволяет получить расстояние до границы и удельное сопротивление одного из слоев. Характерный кроссплот показан на фиг. 8, где используется зависимость отклика затухания при 84 дюймах, 100 кГц, от удельного сопротивления при 28 дюймах и фазовом сдвиге 2 МГц (удельное сопротивление уступа в месте искривления скважины: Rг=0,8 Ом, Rв=3,6 Ом). В данном случае симметризация, по существу, позволяет исключить из рассмотрения другие параметры, такие, как анизотропия и падение. Графики для симметризованного измерения просты. Использование других комбинаций парных измерений для получения согласованной картины увеличит достоверность интерпретации. На фиг. 9 иллюстрируется использование инверсии на основе кроссплота для интерпретации направленных измерений. Для интерпретации измерений в случае модели с одной границей и при фиксированном удельном сопротивлении слоя на уровне 100 Ом, а также при изменяемом удельном сопротивлении на границе раздела слой - уступ в месте искривления скважины (ниже инструмента) и изменяемом расстоянии, используются два направленных измерения при 84 дюймах и 400 кГц. Отклик нечувствителен к удельному сопротивлению слоя, а сигнал определяется главным образом удельным сопротивлением на границе раздела слой - уступ в месте искривления скважины и расстоянием. Точки, представленные на отображенном на экране изображении, показывают замеры удельного сопротивления на границе раздела слой - уступ в месте искривления скважины и расстояния. Значения удельного сопротивления и расстояния считываются из кроссплота и выводятся на экран. Для случая одной границы слоев, когда удельные сопротивления слоев по обе стороны от границы известны, можно использовать три входных сигнала, по меньшей мере, один из которых представляет собой замер удельного сопротивления среды, окружающей инструмент (например, инструмент 36, показанный на фиг. 3). Для более сложных моделей, предусматривающих большее количество границ, применяется программа инверсии, основанная на способе, предложенном в патенте США 6594584. Траекторию ствола скважины проецируют на первоначальную модель пласта. Каротажный инструмент перемещают в пределах сегмента траектории ствола скважины и измеряют отклики инструмента во время движения вдоль упомянутого сегмента. Также определяют ожидаемые отклики инструмента в соответствии с моделью. Разности, полученные при сравнении ожидаемых и измеренных откликов вдоль сегмента, используют затем для коррекции модели, и цикл сравнения и коррекции повторяют до тех пор, пока упомянутые разности не станут меньше некоторого выбранного значения. Робастность инверсной модели увеличивается за счет использования нескольких начальных точек и физических критериев установления различий между решениями. Затем применяют алгоритм инверсии. Этот алгоритм предусматривает использование любых замеров в качестве входных переменных, с последующим нахождением модели, наиболее согласованной с данными. Осуществляется просмотр нескольких моделей, а наилучшая модель выбирается автоматически. Реконструкция типичного профиля удельного сопротивления показана на фиг. 10 А, тогда как реконструкция соответствующей границы (структуры) изображена на фиг. 10 В. Эти результаты показывают,что решения в случае приближения к проводящим слоям точнее, чем в случае приближения к резистивным слоям. Это ожидаемый результат, поскольку отклики направленных измерений характеризуют главным образом проводящий слой, и поэтому они более чувствительны к изменению удельного сопротивления в проводящих слоях, расположенных выше и ниже, чем к изменению удельного сопротивления на границах раздела резистивный слой - уступ в месте искривления скважины. Еще один аспект настоящего изобретения предусматривает использование определенных расстояний до границ с целью принятия решений по геоуправлению. Общий алгоритм геоуправления можно описать со ссылкой на фиг. 11. Сначала на этапе 110 выбирают направленные измерения в реальном масштабе времени способом оперативной аппроксимации, описанным выше. Затем на этапе 120 визуализируют эти направленные измерения в виде ряда логарифмических откликов или с помощью кроссплотов, как показано на фиг. 8 и 10 (и описано выше). После этого на этапе 130 принятия решения поток обработки направляется в зависимости от того,идентифицирована ли подходящая модель. Если структура информации или какие-либо иные параметры известны, то этот подход позволяет пользователю зафиксировать известные параметры. Например, может быть известно, что удельное сопротивление или пролегание верхнего слоя на уступе в месте искривления скважины стабильны, и с высокой степенью определенности может быть известно, что ниже границы нет. Такая информация позволяет, например, выбрать модель с единственной границей и фиксированным удельным сопротивлением на границе раздела слой - уступ в месте искривления скважины.- 18007587 Математически это означает, что нужно инвертировать только три параметра - горизонтальное и вертикальное удельное сопротивление слоя (Rг и Rв) и расстояние до верхней границы. Это пример инверсии полной модели (см. этап 140), которая гарантирует удовлетворительную интерпретацию и позволяет избежать путаницы в случаях ограничений, когда может быть выбрана какая-либо не физическая модель,обеспечивающая лучшую математическую аппроксимацию измерения. В альтернативном варианте, на этапе 150, проводят быстрые аппроксимированные инверсии с множеством моделей наряду с осуществлением на этапе 160 алгоритма автоматического выбора модели. При осуществлении этого алгоритма просматривают разные модели, от простых (отсутствие границ, изотропный пласт) до более сложных (два расстояния и анизотропный пласт), включая однородную изотропную (единственный параметр: удельное сопротивление); однородную анизотропную (два параметра: Rг и RВ); описывающую изотропный пласт с единственной границей, расположенной выше или ниже (три параметра: Rcлoя, Rуступа и расстояние до границы); описывающую анизотропный пласт с единственной границей, расположенной выше или ниже (четыре параметра: Rcлoяг, Rcлoяв, Rуступа и расстояние до границы); описывающую три параметра изотропного пласта с двумя границами (пять параметров: Rслоя,Rуступавверху, Rуступавнизу и расстояния до границ, расположенных выше и ниже инструмента); описывающую три параметра анизотропного пласта с двумя границами (шесть параметров:Rслояг, Rслояв, Rуступавверху, Rуступавнизу и расстояния до границ, расположенных выше и ниже инструмента). Решение получают для каждой модели. При осуществлении алгоритма выбора модели используются физически обоснованные ограничения для направленных измерений и накладываются условия, которые обуславливают выбор простейшей модели, которая аппроксимирует данные (критерий Байеса). Для исключения моделей ввиду их сложности можно использовать классические критерии - информационный критерий Акайке (ИКА) или байесовский информационный критерий. После этого на этапе 180 принятия решения осуществляют проверку модели, чтобы определить, согласуется ли выбранная модель с уже известной информацией о геологическом образовании или с другими измерениями, такими, как измерения, проведенные посредством гамма-каротажа, или с иными измерениями, доступными в реальном масштабе времени, что отображается этапом 170. Если модель согласуется с другими данными, то она принимается как входная (этап 190) для принятия решения по бурению (этап 200), и на этапе 210 выдается соответствующее сообщение. Реализация решения по бурению приведет к дальнейшим направленным измерениям в реальном масштабе времени (этап 100), которые снова вводятся на этапы 110 и 120 аппроксимации и визуализации. Если выбранная инверсная модель не согласуется с другими измерениями (см. этап 170), то следует провести обновление модели. В этом случае на этапе 220 применяется субалгоритм интерактивного режима, согласованный с программой комплексной инверсии, описанной в патенте США 6594584. Автоматическая инверсия зачастую может приводить к неудовлетворительной интерпретации. Это может быть вызвано шумом измерения, вызываемым электронными средствами, а также шумом модели, т.е. тем, что реальная модель отличается от моделей, просматриваемых при инверсии. Например, в модели не включаются параметры вторжения в ствол скважины, тонких слоев, косой или волнистая слоистости, а также конечные размеры инструмента, что может вызвать их несоответствие в процессе аппроксимации. Гибкость и возможность для пользователя выбирать в интерактивном режиме общую модель для сегмента данных являются основополагающими факторами для успешной интерпретации измерений. Программное обеспечение, определяющее субпоследовательность действий в интерактивном режиме(этап 220), имеет особенности, которые обеспечивают: уточнение моделей (этап 221) на основании тенденций, ранее известной информации или сведений из внешнего источника информации; ограничение или фиксацию некоторых параметров (этап 222); исключение некоторых измерений, которые могут подвергаться большему влиянию окружающей среды, не учитываемому в модели; и повторную обработку данных (этап 223). На фиг. 12 изображена схема последовательности операций построения кроссплота направленных измерений, которые обеспечивают определение расстояний до границ, описываемое в других местах данного описания. Создание или модификация кроссплота представляется субпоследовательностью 20 операций, которая инициируется определением подходящей модели (на этапе 30). Затем выбираются подходящие направленные измерения, соответствующие возможности определения и/или прогнозирования удельного сопротивления на уступе в месте искривления скважины (этап 40). Если удельное сопротивление на границе раздела слой - уступ в месте искривления скважины достоверно известно, что часто бывает на крупных месторождениях, где бурят много скважин, то интерпретация основывается на одном удельном сопротивлении и одном направленном измерении (этап 50), чтобы определить истинное удельное сопротивление слоя (с поправкой, учитывающей характеристики на границе раздела слой - уступ в месте искривления скважины) и расстояние до границы. Если удельное сопротивление на границе раз- 19007587 дела слой - уступ в месте искривления скважины неизвестно, то рекомендуется использовать кроссплот двух направленных измерений (этап 60) , как показано на фиг. 9, чтобы определить удельное сопротивление на границе раздела слой - уступ в месте искривления скважины и расстояние до границы. Выбранные измерения вводятся в определенную модель для генерирования откликов на этапе 70, причем эти отклики на этапе 80 могут визуализироваться как показано на фиг. 8 и 9. В случаях, когда ни одно удельное сопротивление неизвестно, а известен диапазон их разности, могут строиться трехмерные кроссплоты на основе объединения одного удельного сопротивления и двух направленных измерений. После построения или обновления кроссплота (что иллюстрируется субпоследовательностью 20 операций), его можно непрерывно обновлять путем введения дополнительных измерений в реальном масштабе времени (этап 100) и визуализации (этап 120'). Обработка кроссплота направленных измерений дает расстояние до одной или более границ пласта и удельное сопротивление одного или более слоев(этап 220), которое можно выдавать и визуализировать (этап 230) в качестве инструкции для принятия решения по бурению на этапе 200. В соответствии с еще одним аспектом настоящего изобретения, создан графический интерфейс пользователя (ГИП), предназначенный для облегчения использования программы и отображения инверсных моделей наслоений с целью визуализации их для пользователя. Блок-схема, иллюстрирующая структуру ГИП и разные способы обработки данных, показана на фиг. 13. Соответственно, ГИП позволяет просматривать опережающую модель для заданного наслоения; строить кроссплоты для анализа чувствительности измерений; осуществлять инверсию данных в реальном масштабе времени, характеризующуюся: проведением инверсии на основе кроссплота применительно к одному удельному сопротивлению и одному расстоянию (для заданного удельного сопротивления уступа в месте искривления скважины или удельного сопротивления пласта); автоматической интерпретацией с использованием быстрой инверсии на основании суперпозиции откликов одиночной границы и автоматического выбора модели, а также физически обоснованных ограничений, в сочетании с использованием информационного критерия Акайке или смешением моделей; интерактивной интерпретацией, основанной на полной инверсии любого параметра (до 6) из трехмерной модели (слой и два уступа в местах искривления скважины - два расстояния и четыре удельных сопротивления), просмотром полной модели слоистой среды в контуре инверсии, обеспечением уточнений модели, предусматривающим опции выбора и отмены выбора параметров инверсии и ограничения их и/или выбора и повторного взвешивания полученных замеров; переключением между быстрым и интерактивным режимами для уточнения модели; визуализацией измерения и инверсии. Пример экрана для интерпретации показан на фиг. 14. На экране отображаются оба измерения, которые используются при инверсии, а также траектория ствола скважины. Графически отображаются инвертированные результаты, включающие в себя расстояние до верхней и нижней границ, удельные сопротивления в слое и двух границах раздела слой - уступ в месте искривления скважины. Результаты показаны от точки к точке и основаны на восстановленных положениях границ. Имеется возможность делать выводы о стратиграфическом падении. Следует отметить, что, хотя опережающая модель, просматриваемая в контуре инверсии, представляет одномерную слоистую среду, применяемый подход позволяет строить и более сложные информационные изображения, включающие в себя непараллельные границы; определение сбросов, включая субсейсмические сбросы. Оценка анизотропии При наличии конфигурации ПЕ-ПР-ПР с наклонной передающей антенной и, по меньшей мере, одной из приемных антенн, можно проводить измерения анизотропии в соответствии с положениями публикации 2003/0200029 заявки на патент США. Для определения анизотропии, объединяют обнаруженные ЭМ сигналы, связанные с разностью фаз или отношением амплитуд. Для такого измерения в указанной заявке предложен новый способ компенсации ствола скважины. Направленную часть таких объединенных измерений можно анализировать так же, как описано выше. Соответственно, можно использовать коэффициенты составляющих для вывода характеристики анизотропии посредством инверсии методом, описанным в упоминавшемся выше патенте США 6594584. Этот вывод справедлив для всех углов падения. Специалистам в данной области техники должно быть понятно, что в сильно отклоненных стволах скважин традиционное измерение методом распространительного каротажа с использованием осевых катушек уже обеспечивает приемлемую чувствительность к анизотропии, что исключает необходимость способа компенсации ствола скважины в этих стволах скважин. Для специалистов в данной области техники должно быть очевидно, что настоящее изобретение может быть реализовано с помощью одного или более подходящих компьютеров общего назначения,имеющих надлежащее аппаратное обеспечение и запрограммированных на проведение процессов согласно изобретению. Программирование можно реализовать посредством использования одного или бо- 20007587 лее устройств для запоминания программ, считываемых процессором компьютера, и кодирования одной или более программ команд, выполняемых компьютером, для проведения вышеописанных операций. Устройство для запоминания программ может принимать форму, например, одного или более флоппидисков, CD-ROM или другого оптического диска, магнитной ленты, микросхемы постоянного запоминающего устройства (ПЗУ), а также другие формы, которые хорошо известны в данной области техники или будут разработаны впоследствии. Программа команд может представлять собой объектный код, т.е. может быть выражена в двоичной форме, исполняемой более или менее непосредственно компьютером, исходный код, который требует компиляции или интерпретации перед выполнением, или может быть представлена в некоторой промежуточной форме, такой, как частично компилированный код. Точные формы устройства для запоминания программ и кодирования команд в данном случае несущественны. Таким образом, эти средства обработки можно реализовать в оборудовании, которое расположено на поверхности, в инструменте, или они могут быть реализованы и в упомянутом оборудовании, и в инструменте, как известно в данной области техники. Способы, согласно изобретению, можно использовать совместно с любого типа системой для каротажа скважин, например, с инструментами, спускаемыми в скважину на тросе, инструментами для каротажа в процессе бурения и/или скважинных исследований в процессе бурения (КвПБ/СИвПБ),или инструментов для каротажа в процессе спуска (КвПС). Из вышеизложенного описания должно быть понятно, что в предпочтительных и альтернативных вариантах осуществления настоящего изобретения могут осуществляться различные модификации и изменения в рамках сущности изобретения. Это описание приведено лишь в целях иллюстрации и не должно считаться носящим ограничительный характер. Объем изобретения должен определяться только текстом нижеследующей формулы изобретения. Термин содержащий(ая, ее) в рамках формулы изобретения следуют считать означающим включающий(ая, ее) в себя, по меньшей мере, так что приводимый перечень элементов в некотором пункте формулы изобретения представляет собой открытую группу. Употребление терминов в единственном числе следует считать распространяющимся и на формы множественного числа таких терминов,если специально не указано иное. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ получения характеристик подземного пласта, включающий в себя этапы, на которых размещают внутри ствола скважины каротажный прибор, оснащенный по меньшей мере первыми антеннами, одна из которых является передающей, а другая приемной, отстоящими на некоторое первое расстояние друг от друга, причем по меньшей мере одна из первых антенн представляет собой щелевой симметричный вибратор, наклоненный относительно продольной оси прибора, при этом первые антенны ориентированы относительно оси каротажного прибора таким образом, что по меньшей мере один наклоненный щелевой симметричный вибратор соответствует первому азимутальному углу; осуществляют азимутальное вращение каротажного прибора внутри ствола скважины; когда каротажный прибор вращается, включают первую передающую антенну для передачи электромагнитной энергии в пласт; когда каротажный прибор вращается, осуществляют направленное измерение первых сигналов напряжения, связанных с передаваемой электромагнитной энергией, с помощью первой приемной антенны в зависимости от азимутальной ориентации каротажного прибора для определения азимутального изменения измеренных первых сигналов напряжения; и осуществляют аппроксимацию азимутального изменения измеренных первых сигналов напряжения, чтобы получить функции, являющиеся его приближением. 2. Способ по п.1, при котором этап аппроксимации проводят во время измерения первых сигналов напряжения. 3. Способ по п.2, дополнительно включающий в себя этап, на котором прекращают аппроксимацию, когда достигнута сходимость. 4. Способ по п.1, при котором аппроксимирующие функции являются синусоидами, определяемыми путем связывания компонентов векторов ориентации щелевого симметричного вибратора первой передающей антенны и первой приемной антенны. 5. Способ по п. 4, при котором коэффициенты аппроксимирующих составляющих являются функциями параметров пласта грунта, включая по меньшей мере один из таких параметров, как удельное сопротивление слоев пласта, место нахождения каротажного прибора, отклонение ствола скважины, азимутальный угол в месте нахождения каротажного прибора, а также их комбинацию. 6. Способ по п.5, при котором аппроксимирующие коэффициенты включают в себя постоянные, а также члены, содержащие sin, cos, sin2 и cos2, которые определяют итеративный алгоритм аппроксимации, используемый для определения азимутальной зависимости направленных измерений. 7. Способ по п.6, при котором используют итеративный алгоритм аппроксимации для выбранных направленных измерений в реальном масштабе времени, применяемых при геоуправлении.- 21007587 8. Способ по п.1, при котором каротажный прибор также оснащен вторыми антеннами, одна из которых является передающей, а другая приемной, отстоящими на некоторое первое расстояние друг от друга, причем вторая передающая антенна представляет собой щелевой симметричный вибратор, наклон которого соответствует наклону первой приемной антенны, а вторая приемная антенна представляет собой щелевой симметричный вибратор, наклон которого соответствует наклону первой передающей антенны, так что по меньшей мере одна из вторых антенн представляет собой наклоненный щелевой симметричный вибратор, при этом вторые передающая и приемная антенны ориентированы относительно оси каротажного прибора таким образом, что по меньшей мере один наклоненный щелевой симметричный вибратор соответствует второму азимутальному углу, и при этом способ также включает в себя этапы, на которых когда каротажный прибор вращается, включают вторую передающую антенну для передачи электромагнитной энергии в пласт; когда каротажный прибор вращается, осуществляют направленное измерение второй группы сигналов напряжения, передающих электромагнитную энергию с помощью второй приемной антенны в зависимости от азимутальной ориентации каротажного прибора, чтобы определить азимутальное изменение измеренных вторых сигналов; и осуществляют аппроксимацию азимутального изменения измеренных вторых сигналов напряжения, чтобы получить функции, являющиеся его приближением. 9. Способ по п.8, при котором второй азимутальный угол отличается от первого азимутального угла, по существу, на 90. 10. Способ по п.8, при котором аппроксимирующие функции являются синусоидами, определяемыми путем связывания компонентов векторов ориентации щелевого симметричного вибратора первой передающей антенны и первой приемной антенны, а также путем связывания компонентов векторов ориентации щелевого симметричного вибратора второй передающей антенны и второй приемной антенны. 11. Способ по п.10, при котором коэффициенты аппроксимирующих составляющих являются функциями таких параметров пласта грунта, как удельное сопротивление слоев пласта, место нахождения каротажного прибора, отклонение ствола скважины и азимутальный угол в месте нахождения каротажного прибора. 12. Способ по п. 11, при котором измеренные первые и вторые сигналы напряжения являются комплексными сигналами напряжения, а способ дополнительно включает в себя этапы, на которых вычисляют значения фазового сдвига и затухания на основании аппроксимирующих коэффициентов для измеренных первых и вторых сигналов напряжения и объединяют вычисленные значения фазового сдвига и затухания для измеренных первых и вторых сигналов напряжения для формирования симметризованного или антисимметризованного результата измерений. 13. Способ по п.11, при котором лишь одна из первых антенн имеет наклоненный щелевой симметричный вибратор, а способ дополнительно включает в себя этап, на котором определяют характеристики шума измеренных первых и вторых сигналов напряжения с использованием коэффициентов гармоник второго порядка. 14. Способ по п.11, при котором каждая из первых антенн представляет собой наклоненный либо поперечный щелевой симметричный вибратор, а аппроксимирующие коэффициенты включают в себя коэффициенты гармоник третьего порядка, причем способ дополнительно включает в себя этап, на котором определяют характеристики шума измеренных первых и вторых сигналов напряжения с использованием коэффициентов гармоник третьего порядка. 15. Способ по п.11, при котором определяют характеристики шума измеренных первых и вторых сигналов напряжения посредством объединения первых и вторых измеренных сигналов напряжения. 16. Способ по п.11, при котором вторые антенны являются симметричными относительно первых антенн, а способ дополнительно включает в себя этапы, на которых временно останавливают вращение каротажного прибора; определяют азимут интересующего слоя путем объединения связей первых и вторых антенн; определяют постоянные коэффициенты и коэффициенты гармоник первого порядка на основании первых и вторых сигналов напряжения, снятых, когда прибор не вращается; и используют постоянные коэффициенты для выполнения этапа аппроксимации, когда каротажный прибор вращается. 17. Способ по п.16, дополнительно включающий в себя этапы, на которых обновляют азимутальные изменения измеренных первых и вторых сигналов напряжения и повторно вычисляют эквивалентные напряжения, когда инструмент находится в плоскости наслоения. 18. Способ по п.1, дополнительно включающий в себя этап, на котором вычисляют амплитуду и фазу измеренного сигнала напряжения в предполагаемом направлении нормали к границе интересующего слоя.- 22007587 19. Способ по п.18, дополнительно включающий в себя этап, на котором определяют фазовый сдвиг и затухание, проводя измерения посредством каротажа на основе распространения ЭМ волн для двух азимутальных углов. 20. Способ определения характеристик подземного пласта, включающий в себя этапы, на которых генерируют график, используя два типа направленных измерений в качестве области значений и области определения графика и имея удельные сопротивления пласта и расстояние до границы слоя, нанесенной на график, формируют вслед за тем координатную сетку; выбирают два направленных каротажных измерения, получаемых от прибора, размещенного в стволе скважины, пересекающей пласт; определяют расположение точки на графике при помощи нанесения на график двух направленных каротажных измерений в качестве пары координат; и получают расстояние до границы слоя и удельное сопротивление пласта при помощи формирования графика взаимной зависимости для соответствующих значений координатной сетки в точке, расположение которой определено. 21. Способ по п.20, при котором этап формирования графика взаимной зависимости осуществляют с использованием модели с одной границей, при этом полученное удельное сопротивление является удельным сопротивлением на границе раздела слой - уступ в месте искривления скважины, а полученное расстояние является наименьшим расстоянием до границы раздела слой - уступ в месте искривления скважины. 22. Способ по п.20, при котором полученные удельное сопротивление и расстояния используются для принятия решений по бурению. 23. Способ определения характеристик подземного пласта, включающий в себя этапы, на которых генерируют график, используя удельное сопротивление и направленное измерение в качестве области значений и области определения графика и имея удельные сопротивления пласта и расстояние до границы слоя, нанесенной на график, формируют вслед за тем координатную сетку; выбирают удельное сопротивление и направленное измерение, получаемые от прибора, размещенного в стволе скважины, пересекающей пласт; определяют расположение точки на графике при помощи нанесения на график удельного сопротивления и направленного измерения в качестве пары координат; и получают расстояние до границы слоя и удельное сопротивление пласта при помощи формирования графика взаимной зависимости для соответствующих значений координатной сетки в точке, расположение которой определено. 24. Способ определения характеристик подземного пласта, включающий в себя этапы, на которых генерируют график, используя удельное сопротивление и направленное измерение в качестве области значений и области определения графика и имея удельные сопротивления пласта и расстояние до границы слоя, нанесенной на график, формируют вслед за тем координатную сетку; выбирают удельное сопротивление и два направленных каротажных измерения, получаемых от прибора, размещенного в стволе скважины, пересекающей пласт; определяют расположение двух точек на графике при помощи нанесения на график удельного сопротивления и каждого из двух направленных каротажных измерений в качестве пары координат; и получают расстояние до границы слоя и удельное сопротивление пласта для по меньшей мере двух слоев пласта при помощи формирования графика взаимной зависимости для соответствующих значений координатной сетки в точках, расположение которых определено. 25. Способ по п.24, дополнительно включающий в себя этап, на котором выбирают подходящую инверсную модель для выбранных направленных измерений в реальном масштабе времени; проверяют, согласуется ли выбранная модель с другой информацией; и используют проверенную модель для принятия решений по бурению. 26. Способ по п.25, при котором этап выбора модели включает в себя создание визуализации выбранных направленных измерений. 27. Способ по п.25, при котором этап выбора модели включает в себя идентификацию параметров известной информации; интерактивный выбор моделей, с помощью которых следует инвертировать выбранные направленные измерения; и выбор простейшей модели, которая аппроксимирует известную информацию. 28. Устройство для измерения характеристик пластов грунта, окружающих ствол скважины, содержащее каротажный прибор, выполненный с возможностью размещения внутри ствола скважины, причем этот каротажный прибор имеет продольную ось и оснащен парами первых и вторых передающих и приемных антенн; при этом пара первых передающей и приемной антенн содержит- 23007587 первую передающую антенну, представляющую собой щелевой симметричный вибратор, ориентированный в первом направлении относительно продольной оси каротажного прибора; и первую приемную антенну, находящуюся на первом расстоянии от первой передающей антенны,представляющую собой щелевой симметричный вибратор, ориентированный во втором направлении,причем первое и второе направления различаются; при этом щелевые симметричные вибраторы первых передающей и приемной антенн определяют плоскость, в которой лежит продольная ось каротажного прибора; при этом пара вторых передающей и приемной антенн содержит вторую передающую антенну, представляющую собой щелевой симметричный вибратор, ориентированный во втором направлении относительно продольной оси каротажного прибора; и вторую приемную антенну, находящуюся на первом расстоянии от второй передающей антенны и представляющую собой щелевой симметричный вибратор, ориентированный в первом направлении,причем первое и второе направления являются разными; причем щелевые симметричные вибраторы вторых передающей и приемной антенн определяют плоскость, в которой лежит продольная ось каротажного прибора, а устройство также содержит датчик угла торца инструмента для непрерывной индикации азимутальной ориентации каротажного прибора; и контроллер для управления парами первых и вторых передающей и приемной антенн, обеспечивающий избирательную передачу электромагнитной энергии в пласт и измерение сигналов напряжения,связь которых с передаваемой электромагнитной энергией представляет собой функцию азимутальной ориентации каротажного прибора. 29. Устройство по п.28, в котором пары вторых передающей и приемной антенн ориентированы под первым азимутальным углом относительно пар первых передающей и приемной антенн вокруг продольной оси каротажного прибора. 30. Устройство по п.28, в котором каждая из передающей и приемной антенн обладает функциональными возможностями приемопередающей антенны. 31. Устройство по п.28, в котором пары первых и вторых передающих и приемных антенн находятся в одних и тех же физических положениях на каротажном приборе.
МПК / Метки
МПК: G01V 3/30
Метки: удельного, направленной, помощью, устройство, электромагнитной, волны, сопротивления, способ, определения
Код ссылки
<a href="https://eas.patents.su/30-7587-ustrojjstvo-i-sposob-opredeleniya-udelnogo-soprotivleniya-s-pomoshhyu-napravlennojj-elektromagnitnojj-volny.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство и способ определения удельного сопротивления с помощью направленной электромагнитной волны</a>
Способ и устройство для определения удельного сопротивления формации, окружающей обсаженную скважину
Номер патента: 3658
Опубликовано: 28.08.2003
Автор: Бенимели Доминик
МПК: G01V 3/20
Метки: окружающей, способ, удельного, формации, сопротивления, определения, устройство, обсаженную, скважину
Формула / Реферат:
1. Способ определения удельного сопротивления геологической формации вокруг ствола скважины, снабженной металлической обсадной колонной, отличающийся тем, что в обсадную колонну подают электрический ток, а чтобы подать ток в формацию на заданном уровне, указанную обсадную колонну шунтируют цепью обратной связи, находящейся в контакте с ней на каждой стороне от измерительного уровня, при этом цепь обратной связи обеспечивает возможность...
Способ и устройство для определения удельного сопротивления формации, через которую проходит обсаженная скважина
Номер патента: 3656
Опубликовано: 28.08.2003
Авторы: Ван Дер Вал Петер, Бегэн Поль, Эрэ Патрик, Бенимели Доминик, Гуно Мари-Терез, Экке Франсуа
МПК: G01V 3/20
Метки: обсаженная, которую, проходит, скважина, определения, сопротивления, формации, способ, удельного, устройство
Формула / Реферат:
1. Способ исследования геологической формации, через которую проходит обсаженная скважина, отличающийся тем, что на первом этапе инжектируют ток в обсадную колонну (11), по меньшей мере, в первой точке (In1), расположенной в продольном направлении, на расстояние от формации для обеспечения утечки тока в формацию, используют для измерения падений потенциалов электроды (a, b, c), задающие два последовательных участка обсадной колонны,...
Способ и устройство для определения удельного сопротивления формации, через которую проходит обсаженная скважина
Номер патента: 4174
Опубликовано: 26.02.2004
Автор: Гуно Мари-Терез
МПК: G01V 3/20
Метки: обсаженная, проходит, которую, удельного, устройство, формации, определения, скважина, способ, сопротивления
Формула / Реферат:
1. Способ определения удельного сопротивления геологической формации, через которую проходит скважина (10), снабженная металлической обсадной колонной (11), при котором удельное сопротивление (Rt) определяют на основании тока (Ifor) утечки, который вынуждают втекать в формацию за пределами обсадной колонны и который определяют на участке обсадной колонны на определенном уровне (b), отличающийся тем, что к току утечки добавляют коэффициент,...
Способ определения анизотропного электрического удельного сопротивления и угла падения пласта в геологической формации
Номер патента: 5645
Опубликовано: 28.04.2005
Автор: Хагивара Терухико
МПК: G01V 3/28
Метки: способ, формации, определения, электрического, удельного, анизотропного, падения, геологической, угла, сопротивления, пласта
Формула / Реферат:
1. Способ определения горизонтальной составляющей электрического удельного сопротивления и вертикальной составляющей электрического удельного сопротивления геологической формации, через которую проходит скважина, содержащий (a) разработку инверсионной модели для различных геологических формаций; (b) установку индукционного инструмента в указанной скважине, причем указанный инструмент имеет продольную ось, передающую антенную решетку, состоящую...
Отображение удельного сопротивления удаленного резервуара
Номер патента: 4172
Опубликовано: 26.02.2004
Автор: Срнка Леонард Дж.
МПК: G01V 3/06
Метки: сопротивления, резервуара, удельного, отображение, удаленного
Формула / Реферат:
1. Способ оценки на поверхности земли глубинного отображения удельного сопротивления подземной геологической формации, содержащий этапы, при которых определяют место подземной геологической формации и по меньшей мере одно среднее удельное сопротивление земли в её окрестности, используя геологические и геофизические данные, полученные в окрестности подземной геологической формации; определяют размеры и зондирующую частоту для электромагнитного...
Предыдущий патент: Электрооптический преобразователь, гелеобразный слой для электрооптического преобразователя, способ приготовления гелеобразного слоя и композиция для осуществления способа
Следующий патент: Способ очистки пестицидов
Случайный патент: Машина для вскрытия трубопровода и рабочий орган