Система и способ для детектирования состояния буровой установки
Номер патента: 7837
Опубликовано: 27.02.2007
Авторы: Алдред Уолтер, Михан Ричард, Фицжеральд Уилльям Джон, Ортон Мэттью Ричард, Лессо Уилльям, Данлоп Джонатан

Формула / Реферат
1. Способ бурения при одновременном автоматическом детектировании состояния буровой установки во время процесса бурения ствола скважины, способ, содержащий этапы:
осуществляют прием двух или более независимых каналов входных данных, причем каждый канал входных данных представляет последовательность измерений, выполненных во время процесса бурения; и
автоматическое детектирование наиболее вероятного состояния буровой установки по меньшей мере из трех возможных состояний буровой установки, детектирование, основанное на двух или более входных каналах.
2. Способ по п.1, дополнительно содержащий этап изменения мероприятия, относящегося к бурению, на основе детектирования наиболее вероятного состояния буровой установки.
3. Способ по п.1, дополнительно содержащий этап исследования данных, относящихся к процессу бурения, и/или характеристик земли, окружающей ствол скважины, собранных во время процесса бурения.
4. Способ по п.1, в котором два или более каналов входных данных представляют результаты измерений оборудования на буровой установке.
5. Способ по п.1, в котором два или более каналов входных данных включают два или несколько следующих входных каналов: нагрузка на крюк, положение блока, крутящий момент или давление водозаборной колонны.
6. Способ по п.1, в котором этап приема включает по меньшей мере три независимых входных канала, и детектирование основано по меньшей мере на трех входных каналах.
7. Способ по п.5, в котором этап приема включает по меньшей мере четыре независимых входных канала, и детектирование основано по меньшей мере на четырех входных каналах.
8. Способ по п.1, в котором этап детектирования дополнительно содержит генерацию вероятности, ассоциированной с каждым возможным состоянием буровой установки.
9. Способ по п.1, дополнительно содержащий этап прогнозирования будущего состояния буровой установки частично на основе текущего состояния буровой установки.
10. Способ по п.1, в котором наиболее вероятное состояние детектируется по меньшей мере из четырех возможных состояний буровой установки.
11. Способ по п.10, в котором наиболее вероятное состояние детектируется по меньшей мере из шести возможных состояний буровой установки.
12. Способ по п.11, в котором наиболее вероятное состояние детектируется по меньшей мере из 10 возможных состояний буровой установки.
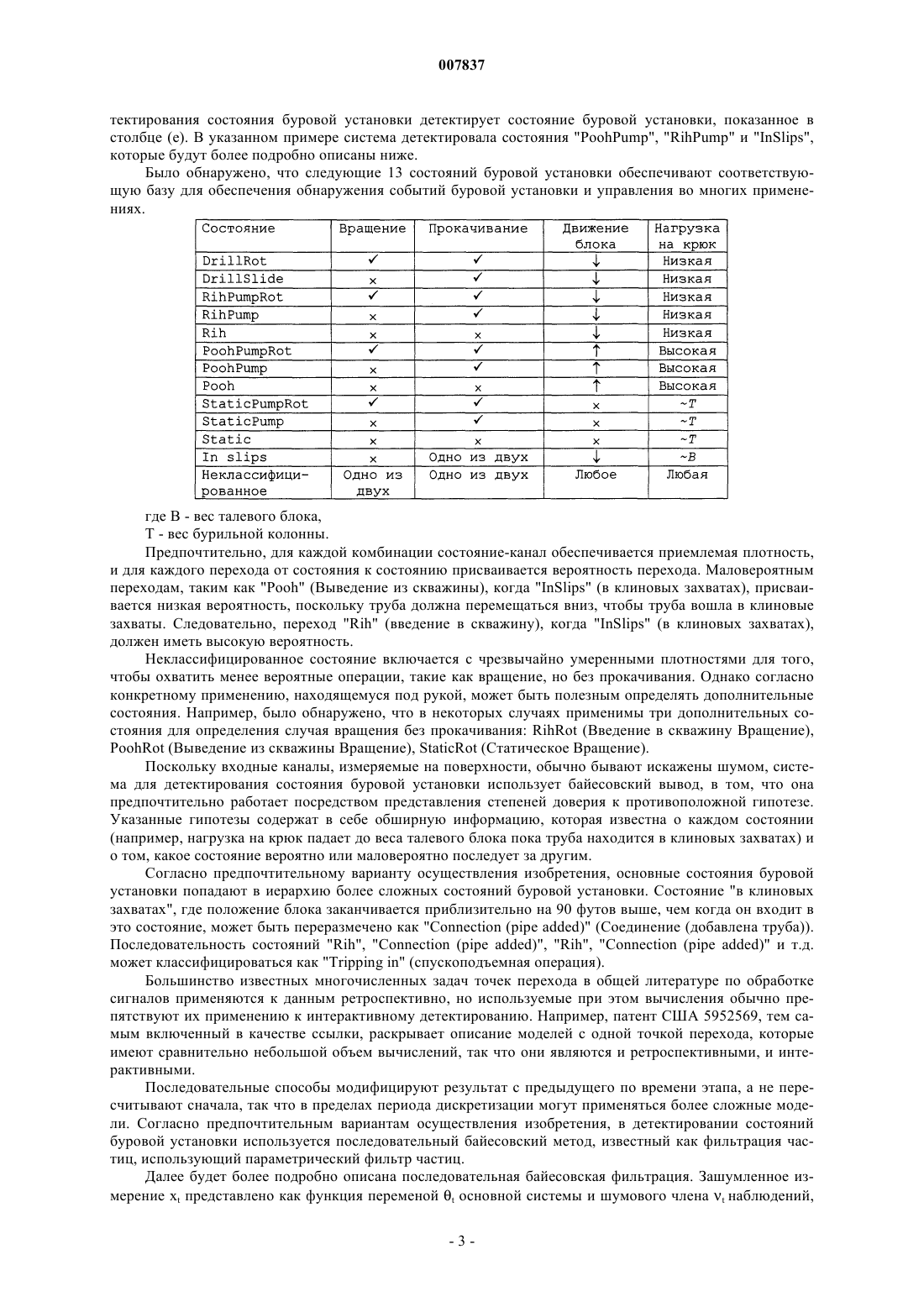
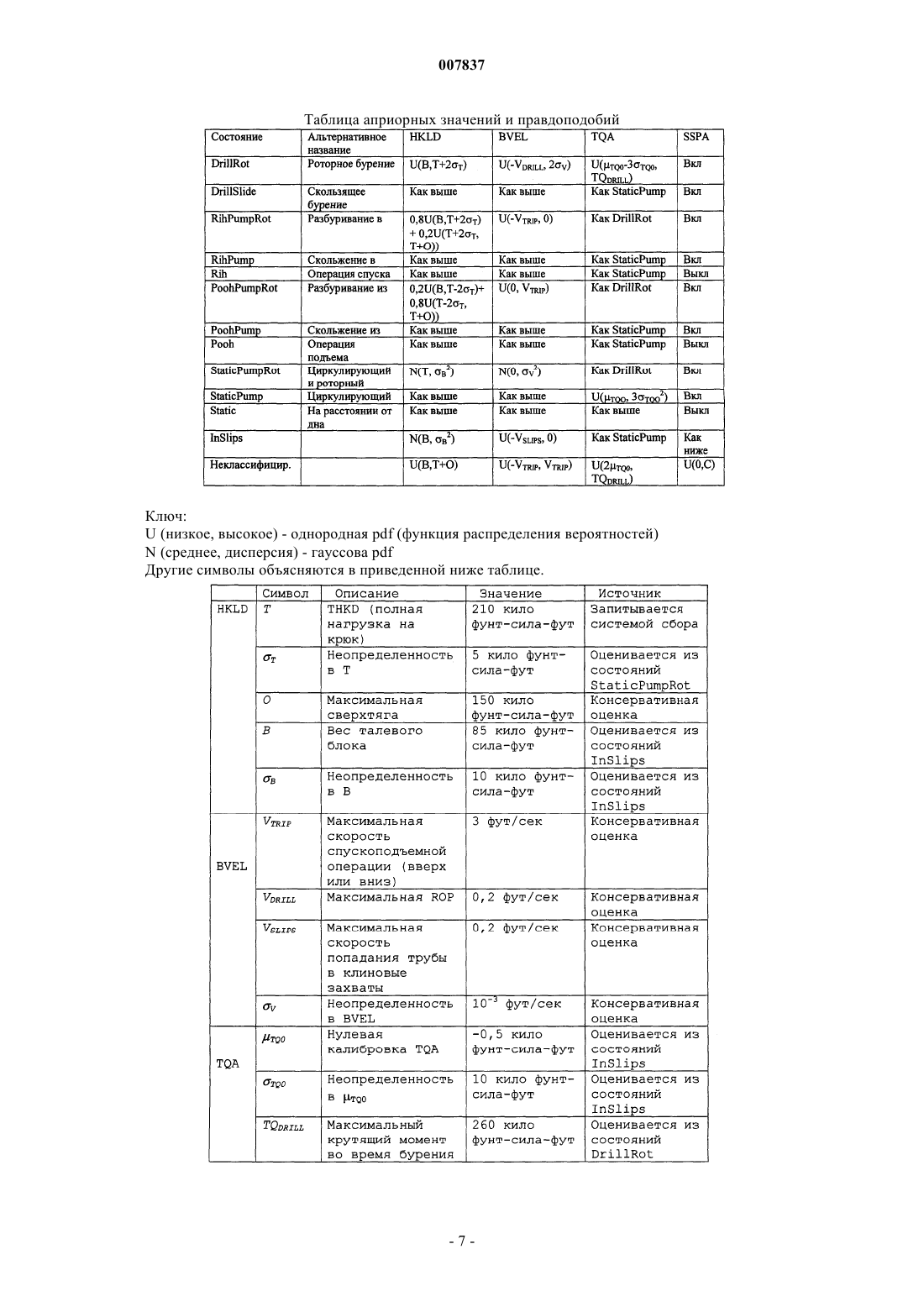
13. Способ по п.1, в котором по меньшей мере три возможных состояния буровой установки включают три или более из следующих состояний буровой установки: бурение в роторном режиме (DrillRot), бурение в скользящем режиме (DrillSlide), разбуривание в ... (RihPumpRot), скольжение в ... (RihPump), операция cnycкa (Rih), разбуривание из ... (PoohPumpRot), скольжение из ... ( PoohPump), операция подъема (Pooh), циркулирующий и роторный режим (StaticPumpRot), циркулирующий режим (StaticPump), на расстоянии от дна (Static), в клиновых захватах (InSlips) и неклассифицированное.
14. Способ по п.1, в котором этап автоматического детектирования использует алгоритм нечеткой логики.
15. Способ по п.1, в котором этап автоматического детектирования использует вероятностный метод.
16. Способ по п.1, в котором этап автоматического детектирования использует байесовский метод.
17. Способ по п.1, в котором этап автоматического детектирования использует последовательный байесовский метод.
18. Способ по п.1, в котором на этапе автоматического детектирования используется метод фильтрации частиц.
19. Способ по п.1, в котором на этапе автоматического детектирования используется метод параметрической фильтрации частиц.
20. Способ по п.1, в котором наиболее вероятное состояние буровой установки детектируется путем вычисления распределения вероятностей возможных состояния буровой установки, используя вероятностную модель, причем вероятностная модель основана на точках перехода и параметрах между точками перехода, где точки перехода выводятся из двух или более входных каналов.
21. Способ по п.20, в котором точки перехода детектируются отдельно для каждого входного канала.
22. Способ по п.21, в котором точки перехода детектируются с использованием последовательного байесовского метода.
23. Способ по п.1, в котором на этапе автоматического детектирования используется метод фильтрации Кальмана.
24. Способ по п.1, в котором этап автоматического детектирования основан, по меньшей мере, частично на двоичных индикаторах из системы сбора данных бурения.
25. Способ по п.24, в котором двоичные индикаторы включают "буровая коронка на дне" и "буровая коронка не на дне".
26. Способ по п.24, в котором двоичные индикаторы включают "в клиновых захватах", "не в клиновых захватах".
27. Способ по п.1, дополнительно содержащий этап обнаружения события бурения, по меньшей мере, частично на основе (i) автоматически детектированного наиболее вероятного состояния буровой установки и (ii) другой информации.
28. Способ по п.27, в котором упомянутый этап обнаружения события бурения осуществляется автоматически.
29. Способ по п.27, в котором этап обнаружения события бурения включает сравнение значений, выведенных из другой информации с пороговыми значениями, и в зависимости от автоматически детектированного наиболее вероятного состояния используются различные пороговые значения.
30. Способ по п.28, в котором обнаруженное событие бурения представляет собой эрозию ствола.
31. Способ по п.28, в котором обнаруженное событие бурения представляет собой захват трубы.
32. Способ по п.28, в котором обнаруженное событие бурения представляет собой предварительно заданный уровень износа буровой коронки.
33. Способ по п.28, в котором этап обнаружения события бурения включает анализ тенденции.
34. Способ по п.28, в котором этап обнаружения события бурения включает анализ крутящего момента и гидродинамического сопротивления.
35. Способ по п.28, дополнительно содержащий этап уведомления обслуживающего персонала буровой установки об обнаруженном событии.
36. Способ по п.35, в котором обнаруженное событие является нежелательным, и уведомление представляет собой предупреждающий сигнал о нежелательном событии.
37. Способ по п.28, дополнительно содержащий этап предложения обслуживающему персоналу буровой установки действия в ответ на обнаруженное событие.
38. Способ по п.27, в котором обнаружение события бурения производится частично в ручном режиме.
39. Способ по п.38, в котором другая информация включает данные MWD (скважинные исследования в процессе бурения).
40. Способ по п.39, в котором обнаруженное событие представляет собой разрушительные виды колебаний.
41. Способ по п.28, в котором событие обнаруживается, используя информацию, взятую из модели земли.
42. Способ по п.1, в котором автоматическое детектирование основано частично на знании базовой информации.
43. Способ по п.1, в котором упомянутые этапы приема и автоматического детектирования повторяются так, чтобы в течение некоторого периода времени детектировались наиболее вероятные состояния буровой установки.
44. Система бурения при одновременном автоматическом детектировании состояния буровой установки во время процесса бурения ствола скважины, содержащая систему накопления, выполненную с возможностью приема двух или более независимых каналов входных данных, причем каждый канал входных данных представляет последовательность измерений, выполненных во время процесса бурения; и систему обработки, адаптированную и спрограммированную для автоматического детектирования наиболее вероятного состояния буровой установки по меньшей мере из трех возможных состояний буровой установки, детектирование, основанное на двух или более входных каналах.
45. Система бурения по п.44, дополнительно содержащая интерфейс пользователя для отображения информации, основанной на детектированном наиболее вероятном состоянии буровой установки, персоналу буровой, так, чтобы изменять операции бурения.
46. Система бурения по п.44, в которой два или несколько каналов входных данных представляют измерения оборудования на буровой установке.
47. Система бурения по п.44, в которой система накопления, выполненная с возможностью приема по меньшей мере трех независимых входных каналов данных, и детектирование основано по меньшей мере на трех входных каналах.
48. Система бурения по п.44, в которой система обработки дополнительно адаптируется и программируется для генерации вероятности, ассоциированной с каждым возможным состоянием буровой установки, и для детектирования будущих состояний буровой установки, основанного частично на вероятности текущего состояния буровой установки.
49. Система бурения по п.44, в которой система обработки детектирует наиболее вероятное состояние буровой установки, используя вероятностный метод.
50. Система бурения по п.49, в которой вероятностный метод включает последовательный байесовский метод, основанный на фильтрации частиц.
51. Система бурения по п.49, в которой система обработки детектирует наиболее вероятное состояние буровой установки посредством вычисления распределения вероятностей возможных состояний буровой установки, используя вероятностную модель, причем вероятностная модель основана на точках перехода и параметрах между точками перехода, где точки перехода выводятся из двух или более входных каналов.
52. Система бурения по п.51, в которой точки перехода детектируются отдельно для каждого входного канала.
53. Система бурения по п.52, в которой точки перехода детектируются с использованием последовательного байесовского метода.
54. Система бурения по п.44, в которой система обработки дополнительно адаптируется и программируется для обнаружения события бурения, по меньшей мере, частично на основе (i) автоматически детектированного наиболее вероятного состояния буровой установки и (ii) другой информации.
55. Система бурения по п.54, в которой обнаружение события бурения осуществляется автоматически.
56. Система бурения по п.55, в которой обнаружение события бурения частично осуществляется, используя информацию, взятую из модели земли.
57. Считываемый компьютером носитель, способный заставлять компьютерную систему осуществлять следующие этапы во время процесса бурения ствола скважины:
прием двух или более независимых каналов входных данных, причем каждый канал входных данных представляет последовательность измерений, выполненных во время процесса бурения;
автоматическое детектирование наиболее вероятного состояния буровой установки по меньшей мере из трех возможных состояний буровой установки, детектирование, основанное на двух или более входных каналах; и
отображение информации, основанной на детектированном наиболее вероятном состоянии буровой установки, персоналу буровой установки, так, чтобы изменить операцию бурения.
58. Носитель по п.57, дополнительно способный заставлять компьютерную систему осуществлять этап изменения операций, относящихся к бурению, на основе детектирования наиболее вероятного состояния буровой установки.
59. Носитель по п.57, в котором детектирование основано по меньшей мере на трех входных каналах.
60. Носитель по п.57, в котором вероятность, связанная с каждым возможным состоянием буровой установки, генерируется компьютерной системой.
61. Носитель по п.57, в котором компьютерная система детектирует наиболее вероятное состояние буровой установки, используя вероятностный метод.
62. Носитель по п.61, в котором вероятностный метод включает последовательный байесовский метод, основанный на фильтрации частиц.
63. Носитель по п.61, в котором вероятностный метод включает анализ точек перехода и параметров для сегментов между точками перехода, выведенными из двух или нескольких входных каналов.
64. Носитель по п.57, в котором компьютерная система дополнительно вынуждается обнаруживать событие бурения, по меньшей мере, частично на основе (i) автоматически детектированного наиболее вероятного состояния буровой установки и (ii) другой информации.
65. Носитель по п.57, в котором обнаружение события бурения осуществляется автоматически.

Текст
007837 Область техники, к которой относится изобретение Настоящее изобретение относится к области технологии бурения в применениях нефтяного промысла. В частности, изобретение относится к системе и способу для автоматического детектирования состояния буровой установки. Уровень техники В применениях нефтяного промысла процессу бурения могут препятствовать множество разнообразных проблем. Точные измерения скважинных условий, свойств скальных пород и поверхностного оборудования позволяют минимизировать угрозы бурения, но они также являются критическими для детектирования того, какая проблема возникает. В настоящее время большинство проблем детектирования является результатом человеческого фактора, однако, вероятность детектирования часто ухудшается вследствие усталости, большой рабочей нагрузки или недостатка опыта. Для детектирования одного из двух возможных состояний буровой установки использовались некоторые ограниченные способы, но в основном они использовали только единственный входной канал. В одном примере используется способ для автоматического детектирования того, находится ли бурильная труба "в клиновых захватах" или "не в клиновых захватах". Указанная информация используется для получения точного управления оценками глубины, например, в сочетании с такими мероприятиями, как скважинные исследования в процессе бурения (MWD или каротаж по буровому раствору). Чтобы сказать, находится ли бурильная труба "в клиновых захватах", известный из уровня техники способ в основном использует только единственный входной канал, измеряемый на поверхности: нагрузка на крюк(Hookload). Другой пример представляет собой способ, используемый для прогнозирования того, находится ли буровая коронка "на дне" или "не на дне". Аналогично, указанный способ применяет только единственный входной канал, а именно местоположение блока, и используется только для детектирования одного из двух "состояний" буровой установки. Известные из уровня техники системы обнаружения событий зависят от того, как обслуживающий персонал буровой установки идентифицирует состояния буровой установки. См., например, "The MDSSystem: Computers Transform Drilling", Bourgois, Burgess, Rike, Unsworth, Oilfield Review. Vol. 2, No. 1,1990, pp.4-15, и "Managing Drilling Risk" Aldred et al., Oilfield Review, Summer 1999, p.219. Сущность изобретения Таким образом, задача настоящего изобретения состоит в обеспечении системы и способа для автоматического детектирования состояния буровой установки, которые используют множественные входные каналы для детектирования одного из нескольких различных состояний буровой установки. Также задача настоящего изобретения состоит в обеспечении системы и способа для обнаружения события бурения на основе автоматического детектирования состояния буровой установки. Согласно настоящему изобретению, обеспечивается способ для бурения при одновременном автоматическом детектировании состояния буровой установки во время процесса бурения ствола скважины,содержащий следующие этапы. Прием двух или нескольких каналов входных данных, причем каждый канал входных данных представляет последовательность измерений, выполненных во время процесса бурения. Автоматическое детектирование наиболее вероятного состояния по меньшей мере из трех возможных состояний буровой установки - детектирование, основанное на двух или нескольких входных каналах. Действия, относящиеся к бурению, предпочтительно изменяются на основе детектирования наиболее вероятного состояния буровой установки. Способ предпочтительно использует три или несколько независимых каналов входных данных, которые предпочтительно выбираются из следующих: нагрузка на крюк, положение блока, крутящий момент или давление вертикальной трубы. Набор возможных состояний предпочтительно включает по меньшей мере 6 состояний, или более предпочтительно, более 10 возможных состояний. Способ также предпочтительно генерирует вероятность каждого возможного состояния буровой установки. Алгоритм, используемый в автоматическом детектировании наиболее вероятного состояния, предпочтительно является вероятностным по природе, и, более предпочтительно, основан на методах фильтрации частиц. Способ предпочтительно включает обнаружение сейсмического явления (события) на основе автоматически детектированного состояния буровой установки. Обнаружение события предпочтительно является автоматическим. Способ предпочтительно либо уведомляет обслуживающий персонал буровой установки об обнаруженном событии, и/или предлагает корректирующее действие. Настоящее изобретение также реализуется в системе для бурения при одновременном автоматическом детектировании состояния буровой установки во время процесса бурения ствола скважины и в считываемом компьютером носителе, способном заставить компьютерную систему осуществлять следующие этапы во время процесса бурения ствола скважины. Используемые здесь фразы "состояния буровой установки" относятся к преднамеренным действиям, имеющим место в системе бурения во время процесса бурения. Кроме того, набор состояний буровой установки предпочтительно задается так, что они являются взаимно исключающими. Используемая здесь фраза "процесс бурения" относится к полной фазе построения ствола скважины, относящейся к бурению ствола скважины, включая операции, общеизвестные из уровня техники как-1 007837 спускоподъемная операция, расширение, роторное бурение, скользящее бурение и установка обсадной колонны. Краткое описание чертежей В дальнейшем изобретение поясняется описанием конкретных вариантов его осуществления со ссылками на сопровождающие чертежи, на которых фиг. 1 - пример входных данных и выходных данных системы детектирования состояния буровой установки, согласно предпочтительному варианту осуществления изобретения; фиг. 2 - параметрический фильтр частиц, показанный как байесовская сеть; фиг. 3 - моделированные данные, в которых каждая выборка была извлечена из одного из трех зашумленных состояний; фиг. 4 - изменения в плотностях апостериорного распределения одной частицы во время четырехкратных этапов из примера, показанного на фиг.3; фиг. 5 - пример параметров фильтра Кальмана, оптимизированного для детектирования состояния"InSlips", используя данные HKLD (нагрузка на крюк) и BPOS (положение блока), согласно предпочтительному варианту осуществления изобретения; фиг. 7 - графики входных сигналов и выходного сигнала системы детектирования состояния буровой установки, согласно предпочтительному варианту осуществления изобретения; фиг. 8 - этапы, участвующие в системе автоматического детектирования состояния буровой установки на основе предпочтительного варианта осуществления изобретения; фиг. 9 - этапы, участвующие в усовершенствованной системе обнаружения событий, согласно предпочтительному варианту осуществления изобретения; фиг. 10 - система 10 бурения с использованием автоматического детектирования состояния буровой установки, согласно предпочтительным вариантам осуществления изобретения; фиг. 11 - дополнительные детали соответствующего процессора, согласно предпочтительным вариантам осуществления изобретения, и фиг. 12 - кусочно-линейное правдоподобие давления водозаборной колонны для случаев включенных насосов и выключенных насосов, согласно описанному примеру. Подробное описание предпочтительных вариантов осуществления изобретения Согласно изобретению, было выяснено, что сигнатуры, которые могут привести к точному обнаружению многих событий бурения, могут распространяться по многочисленным каналам поверхности и наклонной скважины с низким отношением сигнал к шуму. Кроме того, многие из рутинных действий бурильщика могут быть ошибочными из-за проблем, если система не анализируется как целое. Согласно изобретению, было обнаружено, что посредством автоматического детектирования действий буровой установки или "состояния буровой установки" в реальном масштабе времени, указанная информация состояний буровой установки может загружаться в алгоритмы проблемного детектирования, существенно увеличивая тем самым точность таких алгоритмов. В описании изобретения используются следующие обозначения: ВНА - оборудование низа бурильной колонныIDEAL - интегральная оценка бурения и каротажMWD - скважинные исследования в процессе бурения РООН - выведение из скважиныSPIN-DR - исследование, диагностика и рекомендация прихвата колонны - SPIN DoctorTQA - крутящий момент Фиг. 1 изображает пример входных данных и выходных данных системы для детектирования состояния буровой установки, согласно предпочтительному варианту осуществления изобретения. Работа буровой установки может быть разбита на несколько процессов, таких как бурение в роторном режиме,бурение в скользящем режиме, RIH, РООН и т.д., которые управляются бурильщиком. Как показано в столбцах (a)-(d) на фиг. 1, предпочтительные входные каналы представляют собой измерения, выполняемые на поверхности, на буровой установке, а именно: положение блока (а), нагрузка на крюк (b), крутящий момент (с) и давление на стояке (d). На основе указанных четырех входных каналов система де-2 007837 тектирования состояния буровой установки детектирует состояние буровой установки, показанное в столбце (е). В указанном примере система детектировала состояния "PoohPump", "RihPump" и "InSlips",которые будут более подробно описаны ниже. Было обнаружено, что следующие 13 состояний буровой установки обеспечивают соответствующую базу для обеспечения обнаружения событий буровой установки и управления во многих применениях. где В - вес талевого блока,Т - вес бурильной колонны. Предпочтительно, для каждой комбинации состояние-канал обеспечивается приемлемая плотность,и для каждого перехода от состояния к состоянию присваивается вероятность перехода. Маловероятным переходам, таким как "Pooh" (Выведение из скважины), когда "InSlips" (в клиновых захватах), присваивается низкая вероятность, поскольку труба должна перемещаться вниз, чтобы труба вошла в клиновые захваты. Следовательно, переход "Rih" (введение в скважину), когда "InSlips" (в клиновых захватах),должен иметь высокую вероятность. Неклассифицированное состояние включается с чрезвычайно умеренными плотностями для того,чтобы охватить менее вероятные операции, такие как вращение, но без прокачивания. Однако согласно конкретному применению, находящемуся под рукой, может быть полезным определять дополнительные состояния. Например, было обнаружено, что в некоторых случаях применимы три дополнительных состояния для определения случая вращения без прокачивания: RihRot (Введение в скважину Вращение),PoohRot (Выведение из скважины Вращение), StaticRot (Статическое Вращение). Поскольку входные каналы, измеряемые на поверхности, обычно бывают искажены шумом, система для детектирования состояния буровой установки использует байесовский вывод, в том, что она предпочтительно работает посредством представления степеней доверия к противоположной гипотезе. Указанные гипотезы содержат в себе обширную информацию, которая известна о каждом состоянии(например, нагрузка на крюк падает до веса талевого блока пока труба находится в клиновых захватах) и о том, какое состояние вероятно или маловероятно последует за другим. Согласно предпочтительному варианту осуществления изобретения, основные состояния буровой установки попадают в иерархию более сложных состояний буровой установки. Состояние "в клиновых захватах", где положение блока заканчивается приблизительно на 90 футов выше, чем когда он входит в это состояние, может быть переразмечено как "Connection (pipe added)" (Соединение (добавлена труба. Последовательность состояний "Rih", "Connection (pipe added)", "Rih", "Connection (pipe added)" и т.д. может классифицироваться как "Tripping in" (спускоподъемная операция). Большинство известных многочисленных задач точек перехода в общей литературе по обработке сигналов применяются к данным ретроспективно, но используемые при этом вычисления обычно препятствуют их применению к интерактивному детектированию. Например, патент США 5952569, тем самым включенный в качестве ссылки, раскрывает описание моделей с одной точкой перехода, которые имеют сравнительно небольшой объем вычислений, так что они являются и ретроспективными, и интерактивными. Последовательные способы модифицируют результат с предыдущего по времени этапа, а не пересчитывают сначала, так что в пределах периода дискретизации могут применяться более сложные модели. Согласно предпочтительным вариантам осуществления изобретения, в детектировании состояний буровой установки используется последовательный байесовский метод, известный как фильтрация частиц, использующий параметрический фильтр частиц. Далее будет более подробно описана последовательная байесовская фильтрация. Зашумленное измерение xt представлено как функция переменой t основной системы и шумового члена t наблюдений,-3 007837 в модели наблюдений Модель системы охватывает динамику системы. Предполагается, что текущее значение t+1 переменной системы зависит от предыдущего значения t, но не зависит от значения во все остальные времена, t-1, t-2, , 0; такой процесс называется марковским. События, которые влияют на динамику системы, но не охватываются марковским процессом, представлены как другой шумовой процесс, называемый системным шумом Wt. Для примера, t представляет собой вектор, включающий дальность и скорость самолета, летящего непосредственно из аэропорта. Модель системы моделирует дальность, увеличивающуюся на величину, равную произведению скорости и времени выборки t. Параметр Wt представляет собой гауссово распределение, которое моделирует изменение скорости, обусловленное порывами ветра или изменением тяги пилотом. Величина xt представляет собой дальность, задаваемую радаром аэропорта, которое искажается гауссовым шумом наблюдений (объединенные эффекты электрического шума в усилителях, ограниченной разрешающей способностью радара по дальности и т.д.) Согласно предпочтительному варианту осуществления изобретения, система детектирования состояния буровой установки применяет специфический тип фильтра частиц, называемый параметрическим фильтром частиц. Используемый здесь параметрический фильтр частиц (PPF) описывает фильтр частиц, в котором модель системы или модель наблюдений управляется скрытой марковской моделью, определенной в публикации J., Clifford P. и Fearnhead P., "Building Robust Simulation-based Filters for Evolving Data Sets",Technical report, Department of Statistics, University of Oxford, 1998. Скрытая марковская модель (НММ) представляет собой вероятностный процесс по дискретному набору состояний =1, , K. Правдоподобие состояния на следующем по времени шаге задается квадратной матрицей вероятностей переходов Р(t+1/t), которая может охватывать правдоподобные и неправдоподобные последовательности состояний. Фиг. 2 иллюстрирует параметрический фильтр частиц, показанный как байесовская сеть. В представлении байесовской сети параметрического фильтра частиц стрелки указывают направление причинного воздействия. Каждая частица должна учитывать вероятность перехода состояния на каждом этапе, так что частица расщепляется на K новых частиц с весами для j=1, , K. Шаг передискретизации используется для снижения числа частиц с nК обратно до n,чтобы избежать экспоненциально увеличивающегося со временем числа частиц. Теперь будут более подробно обсуждаться шаг передискретизации и фильтр Кальмана. Алгоритм дискретизации с минимальной дисперсией выбирает новый набор весов Xi,j, который минимизирует величину подверженную ограничениям и самое большее n из Xi,j являются ненулевыми. Веса, которые будут распространяться на следующий по времени шаг (mit+1)i=1, , n, будут состоять из ненулевых Xi,j. Результирующий алгоритм будет следующим: 1. Вычислить с, единственное решение до Указанное решение можно получить итеративно. См. публикацию "Sequential Monte Carlo methodsin filter theory", P. Fearnhead, Departament of Statistics, Oxford University, 1998, p.92. остаются с неизменными весами Число остающихся 2. Частицы, в которых частиц составляет k. 3. n-k частиц дискретизируется из остающихся nK-k частиц, используя алгоритм систематической дискретизации (см. Carpenter, 1998, с. 8). Заметим, что опубликованный алгоритм содержит типографскую ошибку; четвертая строчка с конца должна читаться "поменять sk на sj". Дискретизированные частицы сохраняют вес Xi,j=1/с, и оставшиеся устанавливаются равными нулю. 4. Нормализовать Xi,j, чтобы суммировать до единицы. 5. Установить (mit+1)i=1, , n к ненулевым Xi,j. Правдоподобие некого специфического состояния в любое время можно оценить посредством суммы весов частиц в данном состоянии (см. Fearnhead, 1998, с. 88). Если состояние системы остается неизменным, то предполагается, что применяются следующие модели наблюдений и системы Переменные случайного шума Wt и Vt являются многомерными гауссовыми случайными переменными с нулевым средним и ковариационными матрицами Q и R. Переменные Wt и Vt являются некоррелированными. Если априорная переменная является также гауссовой на каждом временном шаге, то обе априорная и апостериорная - будут гауссовыми. Решением этих условий является хорошо известный фильтр Кальмана. Априорная переменная в момент времени t, p(t/x1:t-1), имеет среднее t/t-1 и ковариацию Pt/t-1. Апостериорная переменная в момент времени t, p(t/x1:t), имеет среднее t и ковариацию Pt. Уравнения фильтра Кальмана следующие:K, матрица выигрышей Кальмана, задается выражением Сейчас будет описан простой пример параметрического фильтра частиц. Фиг. 3 изображает моделированные данные, в которых каждая выборка была извлечена из одного из трех зашумленных состояний. В частности, фиг. 3 показывает пример параметрического фильтра частиц, применяемого к моделированным данным, извлеченным из жирных гауссовых кривых 210 с левой стороны графика (а). Узкие гауссовы кривые 212 показывают предыдущее знание местоположений состояний. В данном примере имеется канал с одним входом, обозначенный линией 200, и три состояния обозначены римскими цифрами I, II и III. Центр каждого кружка показывает частицу, его радиус показывает вес частицы, а состояние частицы показано римскими цифрами I, II и III. Использовали 100 частиц. На графике (b) для оценки того, из какого состояния были извлечены данные, использовали PPF(параметрический фильтр частиц). Цифры I, II и III показывают наиболее правдоподобное состояние для каждой выборки. Каждая частица содержала независимый фильтр Кальмана для каждого состояния. Фильтр, соответствующий текущему состоянию частицы, последовательно обновлялся, но другие два фильтра оставались незадействованными. Фиг. 4 показывает изменения в плотностях апостериорного распределения одной частицы во время четырехкратных шагов из примера, показанного на фиг. 3. Три состояния обозначены римскими цифрами I, II и III. Заметим, что все эти графики представляют собой плотности априорного и апостериорного распределения в области определения переменных системы. Плотности правдоподобия в области определения переменных наблюдений должны быть шире, например, р(3/=2) - это почти дельта-функция,так что плотности правдоподобия должны быть очень похожи на р(1/=2), поскольку дисперсия = R. Когда частица изменяет состояние, ее доверительная вероятность старого состояния реинициализируется. При использовании PPF фильтров для систем детектирования состояния буровой установки, если известно, что бурильщик ранее при бурении поддерживал нагрузку на буровую коронку приблизительно 10 кило фунт-сила-фут, то сомнительно предполагать, что бурильщик сделает тоже самое в следующий раз.-5 007837 Каждая частица sit, включающая it, доверительную вероятность состояния НММ (скрытой марковской модели) и it, точки опоры частиц,где it, bit и cit являются апостериорными средними трех состояний (т.е. уравнение (11) для каждого из фильтров Кальмана), Рit - апостериорная дисперсия активного фильтра Кальмана (оба бездействующих фильтра имели дисперсию R, так что сохранять эту информацию в каждой частице неэффективно). Модель Кальмана была одинаковой для каждого состояния F=H=1, Q=0, R=0,3, P1=R. Выбор вероятностей переходов является фундаментальным для поведения фильтра в данном примере. Прямые скачки между состояниями 1 и 3 не были разрешены, так что фильтр оценивал, что правдоподобие пребывания в состоянии 1 в момент времени t=48 было пренебрежимо мало, несмотря на то, что наблюдение было близко к среднему состояния 1. Предполагалось, что НММ модель оставалась на длине состояния, равной приблизительно 20 выборкам, так что вероятность скачка Pj была установлена равной 1/20=0,05. УвеличениеPj могло бы увеличить правдоподобие мини-состояний, существующих в моменты t=33, 72 и 88. Было бы относительно просто задать модель наблюдений с xt в качестве вектора четырех поверхностных каналов и сформировать соответствующую модель системы, но поскольку размерность задачи увеличивается, то требуемое число частиц увеличивается экспоненциально. В задачах, в которых полезную информацию из некоторых каналов выделить легче, чем из других, моделирование более простых каналов с неразвертывающимся правдоподобием понижает размерность задачи. Тогда весовое уравнение для новых частиц становитсяmit - вес i-й частицы - родительской,at - наблюдения, требующие развертывания плотности,bt - наблюдения, не требующие развертывания плотности,t - скрытое состояние - состояние буровой установки,it - вектор параметров, которые содержат доверительную вероятность родительской частицы,p(at/) - гауссово правдоподобие из фильтра Кальмана,p(bt/) - не развертывающееся правдоподобие,p(t/) - вероятность перехода. Указанный подход демонстрируется в следующем примере системы детектирования состояния буровой установки, использующей только каналы HKLD и BPOS. Отношение сигнала к шуму канала BPOS обычно очень высокое, так что этот канал моделировался с не развертывающимся правдоподобием, давая Релевантные априорные значения для HKLD и правдоподобия для BVEL задаются в следующей таблице (правдоподобия TQA и SPPA могут быть проигнорированы до более позднего примера).-6 007837 Таблица априорных значений и правдоподобийN (среднее, дисперсия) - гауссова pdf Другие символы объясняются в приведенной ниже таблице.-7 007837 Фиг. 12 иллюстрирует кусочно-линейные правдоподобия давления водозаборной колонны для случаев включенных и выключенных насосов, согласно описанному примеру. На фиг.12 А=500 фунтов/кв.дюйм, В=1000 фунтов/кв.дюйм, С=5000 фунтов/кв.дюйм, D=2/(2C-B-A), Е=(2 С-2 В)/(А(2 С-В-А. Консервативные оценки предпочтительно трактуются как константы. Параметры, которые оцениваются из конкретных состояний, будут варьироваться от буровой установки к буровой установке, и многие будут варьироваться в зависимости от глубины. Указанные оценки могут быть выполнены персоналом или алгоритмом калибровки. Оценки в вышеприведенной таблице использовались для показанных примеров. Для автоматической калибровки полезны индикаторы "буровая коронка на дне" и "в клиновых захватах" от таких систем, как IDEAL. Когда индикатор "в клиновых захватах" является истинным, параметры В и B предпочтительно устанавливаются равными медиане и стандартному отклонению HKLD данных. Когда индикатор "в клиновых захватах" является истинным, параметр TQ0 предпочтительно устанавливается равным медиане TQA данных. Тем самым автоматически снимаются крутящие моменты подпитки и прорыва. Когда индикатор "буровая коронка на дне" является истинным, параметр TQDRILL предпочтительно устанавливается равным максимальному значению TQA. Очень важным является детектирование, когда бурильная колонна входит в клиновые захваты, так что фильтр Кальмана предпочтительно оптимизируется на выявление указанного перехода. Фиг. 5 показывает параметры фильтра Кальмана, оптимизированные для детектирования состояния "в клиновых захватах". График (а) показывает зависимость параметра "нагрузка на крюк" от номера выборки для ограниченного числа взятых выборок. Данные "нагрузка на крюк" показаны точками 228, соединенными жирной линией 230. Как видно, среднеквадратичное значение 242 аппроксимируется к данным "нагрузка на крюк". Также штрихованными линиями 240 показаны три стандартных отклонения от аппроксимированного среднего квадратичного. Дисперсия R шума наблюдений оценивается посредством аппроксимации среднего квадратичного 242 к данным "RihFump" HKLD, показанным на фиг.5(a). Максимальный градиент аппроксимации среднего квадратичного, показанный линией 244, составлял 4,2 кило фунтсила-фут/с. Предполагалось, что процесс шума системы должен был способен генерировать выборку с величиной порядка 1-сигма, соответствующей одному среднеквадратичному отклонению, так что значение Q устанавливалось равным 4,22=18. На фиг.5(b) также показана зависимость данных "нагрузка на крюк" от номера выборки, но для более широкого диапазона выборок. В приведенном примере линия данных "нагрузка на крюк" снова отмечена номером 230. Оценка Кальмана показана линией 232, которая окружена сначала линией 234 стандартного отклонения оценки Кальмана, затем линией 236 стандартного отклонения шума наблюдений, R,и, наконец, линией 238 стандартного отклонения ошибки Кальмана + R. Поскольку фильтр Кальмана не может очень быстро отслеживать переход, потомок частицы "RihPump" (Введение в скважину Прокачивания) также в состоянии "RihPump" получит намного более низкий вес, чем потомок в состоянии "inslips" (в клиновых захватах), находящийся на значении 85 кило фунт-сила-фут. После того как труба зашла в клиновые захваты, блок будет продолжать падать несколько дюймов,так что изменение BVEL (скорости блока) будет отставать от изменения HKLD (нагрузка на крюк) и поэтому менее пригодно для точного детектирования состояний в клиновых захватах. Параметры SPPA(давление вертикальной трубы) и TQA (крутящий момент) не содержат информации о переходе, так что обработка HKLD должна быть как можно более точной. Фиг.6 показывает детектирование состояний "PoohPump", "RihPump" и "InSlips", используя данныеHKLD (нагрузка на крюк) и BPOS (положение блока), согласно предпочтительному варианту осуществления изобретения. График (а) показывает положение блока; график (b) показывает скорость блока, которая является функцией положения блока. График (с) показывает входной канал "нагрузка на крюк". Используемые здесь входные каналы являются "независимыми", когда одни входные каналы не являются прямой функцией других входных каналов. Таким образом, положение блока и скорость блока не зависят друг от друга, но также оба они не зависят от входного канала "нагрузка на крюк". Как на фиг.3(a), на графике (с) центр каждого кружка показывает частицу, а ее радиус показывает вес частицы. Преобладающее состояние частиц обозначено названиями состояний внизу фиг.6, а именно "PoohPump", "RihPump" и "InSlips". В данном примере используется 100 частиц. График (d) показывает вероятности детектированных состояний путем суммирования веса частиц на каждом номере выборки. Далее будет описан пример системы детектирования состояния буровой установки, использующей четыре входных канала. Установка датчика RPM (числа оборотов в минуту) является намного более сложной, чем датчика крутящего момента (TQA), так что большинство операций бурения нефтяного промысла полагается только на датчик крутящего момента. Заметим, что если становится более практичным обеспечивать RPM датчик на буровой установке, то в качестве входного канала для системы автоматического детектирования состояния буровой установки параметр RPM (число оборотов в минуту)-8 007837 был бы предпочтительнее, чем крутящий момент. При детектировании состояний TQA используется для различения вращательного и невращательного состояний, которые во всем остальном выглядят очень похожими, например, "RihPump" и "RihPumpRot". Любой крутящий момент выше шумового порога должен считаться как вращение. Статистические данные крутящего момента TQA в не вращательном состоянии должны быть приблизительно стационарными, так что развертывающееся правдоподобие не обязательно. Правдоподобия TQA показаны в таблице правдоподобий, приведенной выше. Аналогично, для различения состояния "RihPump" от "Rih", большая часть информации по SPPA(давление водозаборной колонны) также является двоичной: вкл. или выкл. Следовательно, вес новых частиц следующий: не зависит от частиц, так что указангде ную величину необходимо вычислять только один раз в каждом временном шаге. Фиг. 7 изображает графики входной информации и выходной информации системы детектирования состояния буровой установки, согласно предпочтительному варианту осуществления изобретения. В случае фиг. 7 использовались те же данные, что и в примере фиг. 6, но она включает более широкий диапазон выборок. В случае фиг.7 предпочтительный алгоритм, основанный на PPF фильтре, применялся к 16 мин данных бурения. Строки а-е показывают положение блока, скорость блока, нагрузку на крюк,крутящий момент и давление водозаборной колонны, соответственно. Строка f показывает выходную информацию детектирования состояния буровой установки. Различные состояния выражаются в терминах вероятности. Заметим, что на фиг. 7 восемь из предложенных тринадцати состояний были реализованы до настоящего времени и показаны на графике (f) фиг.7. На графике (f), две буквенные метки относятся к следующим состояниям буровой установки: RD = DrillRot, RO = PoohPumpRot, CR = StaticPumpRot, RI = RihPumpRot, С = StaticPump, SO = FoohPump, SI = RihPump и IS = InSlips. Для упрощения интерпретации в данном примере матрице Р переходов были присвоены равномерные значения. Предпочтительны еще более реалистичные значения, так, чтобы улучшить детектирование состояний. Примером маловероятной последовательности состояния является бурение в роторном режиме, происходящем непосредственно после бурения в скользящем режиме (DrillSlide). Это так, поскольку гидродинамическое сопротивление больше во время скользящего режима бурения, как если бы вращение начиналось на дне, нагрузка на буровую коронку могла бы быстро стать нежелательно высокой. Более типичной является последовательность DrillSlide, PoohPump 5 футов, RihPumpRot 5 футов, DrillRot. Первые 12 состояний в вышеприведенной таблице априорных значений и правдоподобий преднамеренно оставляют промежутки в пространстве параметров четырех поверхностных каналов, что соответствует очень маловероятным или потенциально разрушающим операциям, например, если ВНА оборудование (оборудование низа бурильной колонны) содержит гидравлический забойный двигатель, тоRIH операция в процессе вращения, но без прокачивания, является очень рискованной операцией; так,если бы буровая коронка коснулась стенки ствола скважины и вращалась, она могла бы всасывать буровой раствор и, возможно, врезаться в двигатель. Чтобы закрыть указанные промежутки и предотвратить нестабильность в программном обеспечении, задается состояние, называемое "неклассифицированное" с очень широкими априорными значениями. Фиг. 8 изображает шаги, осуществляемые в системе автоматического детектирования состояния буровой установки на основе предпочтительного варианта осуществления изобретения. В частности, фиг. 8 показывает шаги для использования способа параметрической фильтрации частиц для автоматического детектирования состояния буровой установки. На шаге 110 инициализируется n частиц с равным весом и равным числом частиц в каждом состоянии. Предпочтительно, частицы случайно дискретизируются из распределений правдоподобия, которые образуют часть априорной информации 130. Для примеров соответствующих распределений правдоподобия, см. вышеприведенную "таблицу всех априорных значений и правдоподобий". Заметим, что распределения правдоподобия формируют it в уравнении (16). На шаге 112 каждая частица "порождает" новую частицу в каждом состоянии, а затем "умирает". На шаге 114 вес вычисляется как вес родительской частицы на правдоподобие на вероятность перехода. Распределения правдоподобия из априорной информации 130 и данные 132 нового датчика (т.е. входные каналы) предпочтительно участвуют согласно уравнению (16). На шагах 116 и 118 совокупность снижается обратно до n частиц, причем, чем больше вес, тем больше вероятность уцелеть, веса также нормализируются,чтобы в сумме дать единицу. Предпочтительный способ выполнения указанных шагов описан выше, при описании уравнения (6) . На шаге 119 состояние частицы сравнивается с состоянием ее родителя. Если они не одинаковые, то шаг 112 должен повторяться для следующей выборки. Если они одинаковые, то доверительная вероятность частицы предпочтительно уточняется, используя фильтр Кальмана, использующий данные 132 согласно вышеприведенным уравнениям (9)-(13). На шаге 122 доверительные вероятности при необходимости ограничиваются в прежних пределах, используя предпочтительно модели правдоподобия в априорной информации 130, такие как, например, из вышеприведенной таблицы. На шаге 124 веса частиц суммируются в каждом состоянии, что тем самым, дает вероятность состояния для-9 007837 каждой выборки, и затем шаг 112 повторяется для следующей выборки. Согласно настоящему изобретению, когда условия бурения обеспечивают достаточно большую вероятность возникновения конкретного события бурения, должно быть известно априори, что изменение конкретного состояния буровой установки могло бы существенно обострить проблему. Например, при приближении события забутовки, бурильщик не должен производить выведения из скважины, пока ствол скважины прокачивается по замкнутой системе достаточно тщательно, с учетом вероятности того, что забутовка упадет до приемлемого уровня. Прогнозирование следующего состояния буровой установки может быть выведено из текущих вероятностей состояний и вероятностей переходов Если вероятность события высока, а также вероятность нежелательного следующего состояния буровой установки высока, то, предпочтительно, алгоритм напоминает бурильщику не делать изменений,приводящих к такому конкретному состоянию буровой установки. Предпочтительно, для прогнозирования состояния буровой установки на несколько выборок вперед рекурсивно применяется аналогичный метод. Согласно альтернативному варианту осуществления изобретения, используются дополнительные входные каналы, и состояние буровой установки детектируется точно, без использования методов фильтрации частиц. В указанном примере система детектирования состояния буровой установки использует два входных канала из системы сбора данных бурения, известной как IDEAL от Schlumberger. Более точно, используются двоичные индикаторы: (1) BONB, который показывает, когда буровая коронка находится на дне, и (2) STIS, который показывает, когда труба находится в клиновых захватах. Правило Байеса дает где р(=j/bt) - апостериорная вероятность состояния j, p(bt/(t=j) - многомерное правдоподобие состояния j, p(t=j) - априорная вероятность состояния j. Моделирование правдоподобий независимо дает Продолжение таблицы правдоподобий, чтобы включить двоичные индикаторы, дает следующую таблицу. Согласно другому альтернативному варианту осуществления изобретения, для автоматического детектирования состояния буровой установки вместо вышеописанных вероятностных способов или в комбинации с ними используется нечеткая логика.- 10007837 Согласно альтернативному варианту осуществления изобретения, для детектирования временных особенностей в данных, таких как ступенчатые изменения, пилообразные изменения и т.д., к каждому входному каналу применяется независимый фильтр частиц; такие фильтры называются "детекторами точек перехода". Далее, для определения вероятности каждого состояния буровой установки фильтр частиц анализирует оценку распределения точек перехода и параметров сегментов в дополнение к необработанным данным канала. Детекторы точек перехода рассчитываются для сегментации сигнала на сегменты, каждый из которых может быть описан посредством следующей основной линейной модели где m - время точки перехода в начале указанного сегмента (таким образом, t+1 представляет собой время точки перехода следующего сегмента);y(m:t) - данные от времени m до t, расположенные в векторе-столбце;b - вектор-столбец коэффициентов (алгоритму необязательно знать значение b);Gj - матрица для j-й модели и Gj (1:t-m+l) показывает первые t-m+1 строки матрицы. Например, G1,показанная ниже, представляет собой модель для данных с постоянным средним, и b будет иметь один элемент, который является значением этого среднего; G2 представляет собой модель для линейно варьирующихся данных, и b будет иметь два элемента, являющихся угловыми коэффициентами линии; G3 представляет собой модель для экспоненциального спада со степенью , и b будет иметь два элемента,являющихся конечным значением спада и амплитудой экспоненты. Далее Gj(k) будет показывать k-ю строку матрицы. Полное число моделей составляет J, а параметрыGl, G2, , Gj должны задаваться пользователем. Следующие модели данных, которые подгоняются к этой основной системе, представляют собой полиномы любого порядка, синусоидальные модели с известными частотами и авторегрессивные модели. Предполагается, что можно задавать произвольное число строк матрицы Gj; для вышеприведенных примеров очевидно, как это делать.w представляет собой вектор-столбец того же размера, что и y(m:t), каждый элемент которого является независимой выборкой нулевого среднего гауссова распределения с дисперсией 2. Как и в случае b,алгоритм не обязан знать значение . Для получения данных с точками перехода, значения b ибудут различными в каждом сегменте. Желательным выходным результатом алгоритма является набор списков времен точек перехода и вероятность каждого списка. Таким образом, наиболее вероятным списком является наиболее вероятная сегментация данных согласно выбору моделей, G1, , Gj. Сегментация сигнала лучше всего описывается с использованием древовидной структуры, и алгоритм может рассматриваться как поиск указанного дерева. В момент времени 0 (перед тем, как поступили какие-либо данные), древовидная структура состоит из одного корневого узла R. В момент времени 1 корневые узлы расщепляются на J листьев, по одному листку на каждую из J моделей сегментов - первый лист представляет гипотезу о том, что первая точка данных моделируется с G1, второй лист - гипотезу G2 и т.д. В последующие моменты времени древовидная структура вырастает на каждый корневой узел, расщепленный на J+1 листьев, по одному для каждой модели, и еще один лишний, представленный нулем, который показывает, что точка данных в соответствующий момент времени принадлежит такому же сегменту модели, что и ее родительская точка. Например, согласно двум уже описанным моделям,путь через дерево от корня до концевой вершины в момент времени 10 должен быть R1000002000, и он должен показывать, что вектор y(1:6) был генерирован с помощью Gl, а вектор y(7:10) был генерирован с помощью G2 (для примеров G1 и G2, данных ранее, постоянный уровень, за которым следует наклонная зависимость). Полезно ввести следующую терминологию. Рассмотрим краевой узел (лист дерева):"Текущая модель" может быть найдена путем перемещения по дереву к корню, пока не попадется не нулевой узел - текущая модель является значением этого узла."Самая недавняя точка перехода" представляет собой момент времени, соответствующий узлу в предыдущей точке маркера. Пока дерево растет, оно ищется с использованием совокупности частиц, каждая из которых занимает отдельный лист (краевой узел). Пусть частицы будут помечены индексами i=l, 2, , N, (N выбирается пользователем, обычно оказывается достаточным выбирать его в пределах 20-100), которые, будучи ассоциированными с частицей i, являются весом wi, который может интерпретироваться как вероятность- 11007837 того, что сегментация, показанная путем от частицы до корня (как в вышеприведенном примере), является правильной сегментацией. Так же авторы будут ссылаться на термин "вес узла", представляющий собой вес частицы, который она будет иметь в некотором узле (хотя в действительности может не быть частицы в узле). Чтобы задать алгоритм, описывается способ обновления совокупности N частиц, вопервых, когда поступают новые данные, и, во-вторых, как инициализировать частицы в начале. В момент времени t все дерево будет иметь J(J+1)t-1 листьев, и предполагается, что NJ(J+l)t-1, так что не все листья заняты частицей. (Случай, когда NJ(J+l)t-1 представляет собой процесс инициализации, описанный ниже). Цель алгоритма состоит в концентрировании частицы на листьях, что означает,что веса частиц будут большими. Для обновления частиц от времени t-1 к времени t необходимы следующие действия. Каждая частица привязывается к ее J+1 краевым узлам (листьям) в момент времени t. Для частиц N в совокупности будет (J+1)N таких узлов - новые частицы помещаются в каждом из указанных узлов. Например, частица, путь которой обратно к корневому узлу будет R1000002000, могла бы порождать 3 новых частицы, пути которых обратно к корневому узлу могли бы быть Новые частицы упоминаются как "дочерние", а старые частицы упоминаются как "родительские". Веса для дочерних частиц вычисляются как произведение трех членов: wchild=wparentwpriorwlikelihood,которые описаны ниже. 1. wparent - вес родительской частицы. 2. wprior - член, который зависит от значения дочернего узла; пользователь задает число Рр, которое находится между 0 и 1; если дочерний узел является 0, то wprior=1-Pp, в противном случае wprior=Pp/J. Математически, - это априорная вероятность точки перехода в произвольный момент времени, так что малые значения Рр способствуют длинным сегментам. (Заметим, что возможны более сложные спецификации указанного параметра, как, например, неодинаковое распределение Рр среди J моделей, когда дочерний узел не является 0, подразумевая, что некоторые модели являются более вероятными, чем другие.) Также спецификации, которые предотвращают сегменты, меньшие некоторого значения Тmin для заданного узла; если самая последняя точка перехода намного меньше, чем Tmin, то узел имеет wprior 1, если значение узла равно 0, и wprior=0 в противном случае. Если самая последняя точка перехода намного больше, чем Тmin, то в главном тексте используется простая модель. 3. wlikelihood - член, который зависит от данных, текущей модели, времени самой последней точки перехода и трех переменных, задаваемых пользователем: ,и , все из которых являются положительными скалярными величинами. Они определяются методом проб и ошибок, но более подходящими стартовыми значениями являются , =0,1 и =50. Увеличениеспособствует немногочисленным точкам перехода. Допустим, для рассматриваемой дочерней частицы в момент времени t текущей моделью является j, самой последней точкой перехода является m, тогда wlikelihood дается формулой:(.) - гамма-функция, I - матрица идентичности с соответственно заданными размерами и T обозначает транспозицию матрицы. (Указанное вычисление вытекает из модели данных y(m:t)=Gjb+w, которая задает правдоподобие данныхb и , и априорное распределение для Из них величина- 12 может быть вычислена путем, которая может быть найдена из посредством стандартных вероятностных манипуляций, и приводит к выражению для wlikelihood, данному выше) . Веса дочерних частиц нормализуются путем вычисления их суммы, и замены каждого веса дочерней частицы его существующим значением, деленным на сумму. Из N(J+1) дочерних частиц выбираются N частиц, которые на следующем временном шаге должны стать родительскими частицами. Это делается либо путем использования способа повторной выборки,заданного в PPF варианте осуществления детектора состояния буровой установки, либо просто путем выбора N частиц с наибольшими весами. В последнем случае уцелевшие частицы имеют свои веса перенормализованными, как в предыдущей точке маркера. Теперь будет описана процедура инициализации. В момент времени 1 дерево имеет только J краевых узлов (листьев), так что инициализируется Jj частиц, по одной для каждого листа; их веса устанавливаются равными 1/J. Чтобы перейти от t=1 к 2, к J частицам применяются обычные шаги обновления (как описано выше), так что теперь имеется J (Jj+1) дочерних частиц. Если J(J+1)N, то финальный шаг выбора опускается (последняя точка маркера). Указанная процедура продолжается до тех пор, пока число дочерних частиц не превысит N, затем шаг выбора повторно вводится на каждом временном шаге. Далее описаны два конкретных вариантов осуществления данного алгоритма для задачи детектирования состояния буровой установки.TQA данные могут моделироваться с сегментами постоянного среднего, таким образом, алгоритм точки перехода используется с G1, заданным выше. Подходящими значениями для переменных, задаваемых пользователем, являются =0,1, =0,1, =100 и Рp=0,1.BPOS данные состоят из плоских и наклонных сегментов с малой величиной шума, так что детектор точки перехода используется с величинами G1 (данные с постоянным средним) и G2 (линейно варьирующиеся данные), заданными ранее. Соответствующими переменными, задаваемыми пользователем, являются =3, =0,4, =1000. Спецификация для wprior отличается от заданной выше, с учетом того факта, что два G1 сегмента не могут быть смежными (поскольку истинное положение блока должно быть непрерывным во времени). Рассматривая дочернюю частицу во времени t, допустим, что М - модель, указанная частицей для времени t1 (М=1 подразумевает G1, М=2 подразумевает G2), а n является значением узла в момент времени t, тогдаwprior задается согласно следующей таблице. Для приведенного примера подходит Рр=0,05. Детектор состояния буровой установки предпочтительно использует результаты детекторов точек перехода на своем входе, но чтобы перевести их в соответствующий формат, требуется некоторая дополнительная обработка. Будут даны типичные примеры обработки для двух каналов, рассмотренных выше.TQA канал может быть использован для вывода, если бурильная колонна вращается (ROT) или не и вероятность этих двух событий является достаточно кратким обзором информации,вращается доставляемой TQA каналом. Это умозаключение выполняется через средний уровень TQA канала (параметр b для текущего сегмента в детекторе точек перехода) следующим образом. Если вращательным режимом является ROT, то средний уровень моделируется с и если враща то средний уровень моделируется с(подхотельным режимом является дящие значения для TQ0, TQ0, TQDRILL могут быть найдены, используя такую же процедуру, как в варианте осуществления с PPF фильтром перенесенном "таблица априорных значений и правдоподобий"). Предположим, что теорему Байеса), что дает модели среднего уровня могут быть объединены (используя Они могут использоваться с выходом TQA детектора точки перехода для оценки следующим образом. Установим PROT(t)=0, выберем Ns, (Эта переменная должна определяться экспериментально, Ns=100 является хорошим выбором по умолчанию. Следующая процедура вычисляет аппроксимацию величиныP(ROT/y(1:tr и повышение Ns повышает точность аппроксимации), тогда для ns=1, , Ns. Используется алгоритм систематической выборки (см. Carpenter, 1998, р.8), выбирается один раз изTQA весов частиц, и i устанавливается равным индексу, выбранному алгоритмом. Находится mi, время самой последней точки перехода для TQA частицы i. Вычисляются следующие члены, где g1=G1(1: t-mi+l): Генерируется выборка из распределения Стьюдента по t с v степенями свободы, используя алгоритм ("Statistical Computing", W.J.KennedyJ.E.Gentle, Marcel Dekker, New York, 1980, p.219-220) и сохраняя выборку в х. Устанавливается Приращивается PROT(t) ,где wi представляет собой вес частицы i. В конце указанного процесса, PROT(t) представляет собой вероятность (показанную данными y(1:t,представляет собой вероятность, с которой с которой вращается бурильная колонна, а бурильная колонна находится неподвижной. Краткий обзор из BPOS канала несколько отличается. Информация из этого канала является достаточной, если блок является неподвижным, перемещается вверх или перемещается вниз. Событие STAT(блок неподвижен) эквивалентно текущей модели сегмента G1, событие UP (вверх) описывается текущей моделью сегмента G2 и параметр наклона (в этом случае b(2 является положительным, событие DOWN(вниз) описывается текущей моделью сегмента G2 и параметр наклона является отрицательным. Вероятности этих событий в момент времени t (указанный данными) записываются как PSTATIC(t), PUP(t) иPDOWN(t) и вычисляются следующим образом. Инициализировать параметры PDOWN(t)=0 и PSTAT(t)=0, тогда для i = 1, , N: Ищется время самой последней точки перехода mi, и текущая модель Мi. Если Mi=l, прирастить PSTAT(t) , используя где wi представляет собой текущий вес частицы. Если Мi=2, вычислить следующие члены, где представляет собой матрицу 2x2). В конце указанного процесса вычисляется Pup(t), используя Подобные вычисления могут быть выполнены, чтобы вывести эквивалентные резюме для других каналов. Теперь будет обсуждаться пример упрощенной модели детектирования состояния буровой установки, используя два варианта осуществления точек перехода, данных выше в качестве входных данных. Пусть t - случайная переменная состояния буровой установки в момент времени t, принимающая одно из следующих значений:PoohPumpRot, PoohPump, RihPumpRot, RihPump, StaticPumpRot, StaticPump. Эти шесть состояний могут классифицироваться, используя краткий обзор из TQA и BPOS каналов и следующей таблицы. Цель алгоритма детектирования состояния буровой установки состоит в вычислении вероятности каждого значения t, используя и обновления указанных вероятностей по мере увеличения времени t. Пользователь может задавать вероятность для всех возможных переходов состояний, например,Pr(t=PoohPump/StaticPump), и они могут быть заключены в матрицу , так что i,j=Pr (t=j/t-1=i) с i и j,варьирующимися по шести возможным состояниям. Указанная матрица должна удовлетворять условию i,j0 для всех i,j и условию ji,j=1 для всех i,так что каждая строка является соответствующим распределением вероятностей. Для иллюстративного варианта осуществления достаточной является следующая простая спецификация: i,j= для ij иi,j=1-5 для i=j. Подходящим значением является =0,05, и уменьшающеесяимеет тенденцию способствовать нескольким изменениям состояния. Возможны более сложные спецификации, которые учитывают некоторые переходы состояний, являющиеся более вероятными, чем другие. Информация, содержащаяся в выходных сигналах детектора точек переходов, включается следующим образом. Допустим условия являются выходными сигналами из TQA и BPOS каналов, собранными в два вектора. Пользователь может задавать двенадцать функций правдоподобия формы p(PTQA(t)/1) и p(PBPOS(t)/1) для всех шести возможных t. Поскольку оба значения PTQA(t) и PBPOS(t) являются векторами, ограниченными так, что их элементы должны в сумме давать 1, эти правдоподобия должны задаваться на подобных интервалах. Класс распределений Дирихле имеет это свойство, так что они используются в этом примере. Распределение Дирихле с k переменными имеет форму для i, , k0 и kj=1j=1 и параметры j0. Точная спецификация данных правдоподобий для примера модели следующая. Для tPoohPumpRot, RihPumpRot, StaticPumpRot правдоподобие представляет собой 2-элементное распределение Дирихле с параметрами 1=3 и 2=1. Для tPoohPump, RihPump, StaticPump правдоподобие представляет собой 2-элементное распределение Дирихле с параметрами 1=1 и 2=3. Для tRihPumpRot,RihPump: представляет собой 3-элементное распределение Дирихле с параметрами 1=3, 2=1 и 3=1. Для tStaticPumpRot, StaticPump правдоподобие представляет собой 3-элементное распределение Дирихле с параметрами 1=1, 2=3 и 3=1. Для tPoohPumpRot,PoohPump правдоподобие представляет собой 3-элементное распределение Дирихле с параметрами 1=1, 2=1 и 3=3. Идея, на которой основаны приведенные соотношения, заключается в том, что наибольшийпараметр соответствует элементу в PTQA(t) или PBPOS(t), который будет больше для заданного состояния буровой установки. Например, t= PoohPumpRot подразумевает, что режим вращения должен быть ROT и режим перемещения блока должен быть DOWN, так что второй элемент параметра PTQA(t) (соответствующий PROT) должен быть большим, и третий элемент параметра PBPOS(t) (соответствующий PDOWN) должен быть большим. Это отражается в вышеприведенной спецификации правдоподобия, где дляp(PTQA(t)/t=PoohPumpRot)2 2 является большим, и для p(PBPOS(t)/t=PoohPumpRot)3 3 является большим. Также важно, что небольшие значенияидентично устанавливаются равными 1, поскольку, если это не так, то (например) p(PTQA(t)=[1 0]/t)=0. Событие PTQA(t)=[l 0] означает, что детектор точек перехода является таким, что действует режим TQA, так что не может быть так, чтобы правдоподобие этого события было равно 0. Однако, если используется вышеприведенная спецификация, то правдоподобие находится в своем максимуме для PTQA(t)=[1 0]. Для вычисления вероятности состояния буровой установки используется следующий алгоритм, и предполагается, что алгоритмы детектирования точек перехода являются действующими, и выдают их краткий обзор вероятности. Устанавливается Z0=[1 1 1 1 1 1]/6. Для t = 1,2,. Устанавливается zt=zt-1 и k=1. Для каждого iPoohPumpRot,PoohPump, , StaticPump Устанавливается Устанавливается Конец. Устанавливается Z=zt(1)zt(6), затем устанавливается zt(k)zt(k)/Z для k=1, , 6. Конец. В конце каждой итерации zt находится 6-элементный вектор, содержащий оценки вероятности для шести состояний буровой установки, обусловленные данными датчика до времени t. Согласно предпочтительным вариантам осуществления изобретения, автоматически детектируемая информация состояния буровой установки используется в качестве части более общей системы обнаружения событий. В частности, было обнаружено, что способность диагностировать некоторые проблемы бурения во многом улучшается путем использования автоматически детектированного состояния буровой установки. Согласно одному из вариантов осуществления изобретения, обеспечивается усовершенствованное диагностическое устройство для детектирования проблем, ассоциированных с прихватом колонны. Устройство предпочтительно базируется на таком известном диагностическом устройстве, как SPIN doctor от Schlumberger. Известный из уровня техники инструмент запрашивает персонал буровой установки о состоянии буровой установки, когда труба оказывается прихваченной в скважине. См. Managing DrillingRisk, Aldred и соавт., Oilfield Review, summer 1999, at page 11. Согласно изобретению, такое диагностическое устройство, как SPIN-DR, модифицируется для приема входного сигнала непосредственно из вышеописанной системы автоматического детектирования состояния буровой установки, во многом улучшая и автоматизируя детектирование начала прихвата бурильной колонны. Фиг. 9 изображает шаги, участвующие в усовершенствованной системе обнаружения событий, согласно предпочтительному варианту осуществления изобретения. На шаге 134 принимаются или воспринимаются измеренные данные поверхностных наблюдений. Примеры включают параметры: нагрузка на крюк, положение или скорость блока, давление водозаборной колонны, крутящий момент, а также детектированная входная информация, такая как индикаторы "буровая коронка на дне" и "в клиновых захватах" из такой системы, как IDEAL. На шаге 136 принимаются измеренные данные наклонной скважины, такие как MWD или LWD данные. На шаге 132 данные вводятся в систему 100 автоматического детектирования состояния буровой установки, как описано выше со ссылкой на фиг. 8. Как описано на фиг. 8, априорная информация также вводится в систему 100 автоматического детектирования состояния буровой установки. Из системы 100 детектирования информация состояния буровой установки(которая предпочтительно представлена в виде вероятности) вводится в системы обнаружения событий. На шаге 140 информация состояния буровой установки вводится в систему автоматического обнаружения событий, такую как SPIN-DR, используемую для детектирования прихвата бурильной колонны, как описано выше. В целом, на шаге 140 автоматическое обнаружение событий может быть существенно улучшено посредством автоматического детектирования состояния буровой установки. Предпочтительно, на шаге 140 информация состояния буровой установки используется для применения различных вариаций алгоритма обнаружения событий в зависимости от конкретного состояния буровой установки. Если обнаружение событий основано на пороговых параметрах, то пороговые уровни могли бы устанавливаться оптимальными для каждого состояния буровой установки, тем самым значительно снижая ошибочные результаты (например, ложные вызовы) и ошибочные отказы детектора событий. Однако как альтернатива для методов, основанных на пороговых значениях, обнаружение событий предпочтительно вычисляет вероятность, с которой событие происходит или скоро произойдет. Если должен возникнуть сигнал тревоги, то, предпочтительно, это является порогом вычисленной вероятности. На шаге 142, в случае детектора прихвата колонны, когда прихват колонны показывается усовер- 16007837 шенствованной SPIN-DR системой, обслуживающий персонал буровой установки предупреждается. Например, в случае предупреждения о прихвате колонны, предупреждение о прихвате колонны предпочтительно включает установленную причину, такую как "нетарированная скважина". Альтернативно, на шаге 144 вместо предупреждения, система предлагает персоналу буровой корректирующее действие. Например, если диагноз - "нетарированная скважина", то предложенное корректирующее действие могло бы быть "вывести пятно бурового раствора с нефтью". Другим примером усовершенствованной системы обнаружения событий, согласно предпочтительному варианту осуществления изобретения, является усовершенствованная система обнаружения размыва ствола. Согласно этому варианту осуществления изобретения, выполняются следующие дополнительные шаги. Определяется соотношение между давлением прокачивания и расходом бурового раствора для состояния буровой установки, в которых происходит прокачивание. Вычисляется поверхностный расход из данных поверхностных наблюдений, собранных в системе прокачивания. Вычисляется расход наклонной скважины из MWD турбинной сборки. Сравниваются поверхностный расход и расход наклонной скважины, в пределах подобных состояний. Например, вычисления для PoohPumpRot и DrillSlide предпочтительно выполняются отдельно. Если появляется противоречие между поверхностным расходом и расходом наклонной скважины среди подобных состояний, то указывается событие размыва. Для получения дополнительных подробностей об обнаружении разрыва, см. публикацию "Schlumberger Drilling and Measurements overview flier entitled "Washout Alarm" (http: //www.hub. sib.com/Docs/DandM/GraphicsFolder/DMOverviews/Washoutalarm.pdf)", включенная здесь в качестве ссылки. Как показано на фиг. 9, система обнаружения размыва является примером шага 140 системы автоматического обнаружения событий. В случае индикации размыва, на шаге 142 делается предупреждение персоналу буровой. Предпринимаемое корректирующее действие на шаге 146 может быть операцией подъема и проверки соединений инструментов трубы на размыв. Другим примером усовершенствованной системы обнаружения событий, согласно предпочтительному варианту осуществления изобретения, является усовершенствованная система обнаружения износа буровой коронки, использующая анализ механической эффективности. Методы анализа механической эффективности для обнаружения износа буровой коронки известны из уровня техники. См. патент США 4685329 и публикацию "Measuring the Wear of Milled Tooth Bits Using MWD Torque and Weight-on-Bit",Burgess and Lesso, SPE/IADC 13475", обе включенные здесь ссылкой. Согласно изобретению, усовершенствованная система обнаружения износа буровой коронки обеспечивается путем разделения данных на различные случаи на основе состояния буровой установки: (1) роторное бурение (DrillRot), (2) скользящее бурение (DrillSlide) и (3) другие состояния. Данные от состояний не бурения (другие состояния) игнорируются. Затем данные для роторного бурения и скользящего бурения анализируются отдельно,путем точной настройки соотношений крутящего момента и веса для каждого случая. Различный анализ предпочтительно использует тот факт, что поскольку датчик крутящего момента наклонной скважины обычно располагается над забойным двигателем, в то время как воспринимается прямой крутящий момент роторного бурения, и во время скользящего бурения, воспринимается реактивный момент. Согласно другому примеру шага 140, данные, выделенные из системы сбора данных бурения, такой как технология Schulmberger IDEAL, автоматически выделяются в соответствии с состоянием буровой установки. См. патент США 6438495, включенный в настоящее описание в качестве ссылки. В таком случае все данные автоматически разделяются на DrillSlide, DrillRot и другие состояния. Рабочие параметры выбираются для подобных состояний, и тем самым автоматизируется анализ тенденции направления ВНА оборудования. Согласно другому примеру шага 140, усовершенствованная система обнаружения событий основана на анализе крутящего момента и гидродинамического сопротивления. Коммерчески доступное программное обеспечение, такое как DrillSAFE, часть от Schlumberger DrillingOffice или DeaDragS из ассоциации инженеров-буровиков, предпочтительно модифицируется, для автоматизированного приема информации состояния буровой установки, и определения, какой режим анализа крутящего момента и гидродинамического сопротивления использовать. Такая автоматизация обеспечивает возможность непрерывного моделирования измерений растяжения бурильной колонны и крутящего момента. Сравнение указанных моделированных данных с действительными измерениями обеспечивает возможность многочисленных форм детекторов событий, таких как прихват бурильной колонны, зазор между колонной обсадных труб и стенками скважины, откручивание и осыпающийся сланец. Согласно другому примеру шага 140, обеспечивается система обнаружения пульсации проходного поршня. Вообще говоря, буровая коронка имеет почти такой же диаметр, как сам ствол скважины, так что когда бурильная колонна поднимается, буровая коронка действует как поршень, и давление бурового раствора под буровой коронкой снижается. Давление проходного поршня может позволить флюидам пласта поступать в ствол скважины, если бурильная колонна поднимается слишком быстро, что может привести к выбросу или фонтанированию. Наоборот, когда бурильная колонна опускается, давление бурового раствора под буровой коронкой повышается. Это пиковое давление может вызвать разлом пласта,приводя к потере бурового раствора и проблемам стабильности буровой скважины. В каждой точке буровой скважины безопасное максимальное пиковое давление и безопасное минимальное давление про- 17007837 ходного поршня может быть вычислено, например, исходя из модели земли. Давление наклонной скважины может быть вычислено непосредственно или смоделировано. Система обнаружения детектирует опасное давление проходного поршня и пиковое давление, во-первых, посредством детектирования состояния буровой установки, и собирает данные измерения давления наклонной скважины и глубины буровой коронки. Если в какой-либо точке вдоль буровой скважины было превышено или почти превышено безопасное максимальное/минимальное пороговое давление для детектированного состояния, система предупреждает бурильщика о ситуации и предпочтительно предлагает осуществить снижение скорости бурильной колонны. Согласно другому варианту осуществления изобретения, анализ измеренных данных в ручном режиме совершенствуется посредством использования автоматической информации состояния буровой установки. Как показано на фиг. 9, на шаге 150, автоматическая информация состояния буровой установки используется для усовершенствования ручного обнаружения событий. Согласно настоящему изобретению, на шаге 150 наиболее вероятное состояние буровой установки изображается рядом с другими каналами данных, способствуя фокусировке внимания взгляда инженера на каротажных MWD/LWD диаграммах для оценки продуктивного пласта или событий бурения. Состояние предпочтительно не отображается, когда неопределенность состояния превышает предварительно заданный предел. Примером шага 150 является избежание чрезмерных вибраций в бурильной колонне. Для того, чтобы определить, находится ли ВНА оборудование/бурильная колона близко к тому, чтобы войти в одно из нескольких разрушительных режимов колебаний, например, таких как застревание/проскальзывание,побочный резонанс, прямое, хаотичное или обратное вихревое движение, отслеживаются ударные MWD измерения наклонной скважины. Указанный процесс использует выполняемое вручную распознавание картины и существенно совершенствуется путем использования информации состояния буровой установки. Согласно другому варианту осуществления изобретения, автоматически детектируемые события и состояния, во время которых они происходят, загружаются непосредственно в базу данных, как, например, коммерчески используемое программное обеспечение, известное как RiskTRAK от Schlumberger. Кроме того, угрозы, идентифицированные в пределах RiskTRAK, используются в качестве входных данных в автоматические детекторы состояния буровой установки. В частности, идентифицированные угрозы используются для изменения априорных вероятностей алгоритмов обнаружения событий. Фиг. 10 изображает систему 10 бурения с использованием автоматического детектирования состояния буровой установки, согласно предпочтительным вариантам осуществления изобретения. Бурильная колонная 58 показана внутри ствола 46 скважины. Ствол 46 скважины расположен в земле 40, имеющей поверхность 42. Ствол 46 скважины вырезается действием буровой коронки 54. Буровая коронка 54 расположена на дальнем конце оборудования 56 низа бурильной колонны, которое прикрепляется к нижней части бурильной колонны 58. Оборудование 56 низа бурильной колонны содержит несколько устройств,включающих различные сборочные узлы. Согласно настоящему изобретению, сборочные узлы скважинных исследований в процессе бурения (MWD) входят в сборочные узлы 62. Примеры типичных MWD измерений включают направление, наклон, данные геологоразведки, давление наклонной скважины(внутри бурильной трубы и внешнее или давление в затрубном пространстве), удельное сопротивление,плотность и пористость. Также к ним относится сборочный узел для измерения крутящего момента и нагрузки на буровую коронку (не показан). Сигналы от сборочных узлов 62 предпочтительно обрабатываются в процессоре 66. Затем после обработки информация от процессора 66 передается в узел 64 пульсатора. Узел 64 пульсатора преобразует информацию из процессора 66 в импульсы давления в буровом растворе. Импульсы давления генерируются в конкретной конфигурации, которая представляет данные из сборочных узлов 62. Импульсы давления проходят вверх через буровой раствор в центральное отверстие в бурильной колонне и по направлению поверхности системы. Сборочные узлы в оборудовании 56 низа бурильной колонны также могут включать турбину или двигатель для обеспечения энергии для вращения и управления буровой коронки 54. Буровая установка 12 содержит буровую вышку 68 и подъемную систему, роторную систему и систему циркуляции бурового раствора. Подъемная система, которая подвешивает бурильную колонну 58,содержит буровую лебедку 70, ходовой конец 71 талевого каната, кронблок 75, талевый канат 79, талевый блок и крюк 72, вертлюг 74 и неподвижный конец 77 талевого каната. Роторная система содержит устройство 76 Келли, стол 88 бурового ротора и двигатели (не показаны). Роторная система передает вращательную силу бурильной колонне 58, как хорошо известно из уровня техники. Хотя на фиг. 10 показана система с устройством Келли и столом бурового ротора, специалистам должно быть понятно, что настоящее изобретение также применимо к буровым установкам с верхним приводом. Хотя на фиг. 10 показана буровая система, расположенная на земле, специалистам должно быть понятно, что настоящее изобретение равно применимо к морским средам. Система циркуляции бурового раствора прокачивает буровой раствор вниз в центральное отверстие в бурильной колонне. Буровой раствор часто называется глинистым раствором, и он обычно представляет собой смесь воды или дизельного топлива, специальных глин и других химикатов. Буровой раствор хранится в приемной емкости 78 для бурового раствора. Буровой раствор вытягивается в насосы бурово- 18007837 го раствора (не показаны), которые прокачивают его через вертикальную трубу 86 и в устройство 76 Келли через вертлюг 74, который содержит вращающееся уплотнение. Изобретение также применимо к бурению с отрицательным дифференциальным давлением. Если имеет место бурение с отрицательным дифференциальным давлением, то в некоторый момент прежде входа бурильной колонны, в буровой раствор вводится газ с использованием инжекционной системы (не показана). Буровой раствор проходит через бурильную колонну 58 и буровую коронку 54. Зубья буровой коронки размалывают и выдалбливают пласт земли на обломки выбуренной породы, буровой раствор выпускается через отверстия или промывочные насадки в буровой коронке с большой скоростью и давлением. Эти струи бурового раствора поднимают обломки выбуренной породы со дна скважины и подальше от буровой коронки, и вверх по направлению к поверхности в кольцевом пространстве между бурильной колонной 58 и стенкой ствола скважины 46. На поверхности буровой раствор и обломки выбуренной породы выходят из буровой скважины через боковое выпускное отверстие в противовыбросовом превенторе 99 и через возвратный трубопровод(не показан). Противовыбросовый превентор 99 содержит устройство управления давлением и вращающееся уплотнение. Возвратный трубопровод бурового раствора подает буровой раствор в сепаратор (не показан), который отделяет буровой раствор от обломков выбуренной породы. Из сепаратора буровой раствор возвращается в приемную емкость 78 для бурового раствора для хранения и повторного использования. Для выполнения измерения бурового оборудования на буровой установке 10 помещаются различные датчики. В частности, нагрузка на крюк измеряется датчиком 94 нагрузки на крюк, расположенным на неподвижном конце 77 талевого каната; положение блока и связанная с ним скорость блока измеряются датчиком 95 блока, который является частью буровой лебедки 70. Поверхностный крутящий момент измеряется датчиком, расположенным на столе 88 бурового ротора. Давление водозаборной колонны измеряется датчиком 92 давления, расположенным на водозаборной колонне 86. Сигналы от таких измерений передаются в центральный процессор 96 на поверхности. Кроме того, импульсы бурового раствора, проходящие вверх бурильной колонны, детектируются датчиком 92 давления. Датчик 92 давления содержит преобразователь, который преобразует давление бурового раствора в электронные сигналы. Датчик 92 давления подсоединен к процессору 96 на поверхности, который преобразует сигнал из(аналогового) сигнала давления в цифровую форму, запоминает и демодулирует цифровой сигнал в приемлемые MWD данные. Согласно различным вариантам осуществления изобретения, описанным выше,процессор 96 на поверхности программируется для автоматического детектирования наиболее вероятного состояния буровой установки на основе различных описанных входных каналов. Процессор 96 также программируется, чтобы осуществлять автоматизированное обнаружение событий, описанное выше. Предпочтительно, процессор 96 передает информацию детектирования событий и/или состояния буровой установки в систему 97 интерфейса пользователя, которая проектируется, с возможностью предупреждения обслуживающего персонала буровой системы о нежелательных событиях и/или возможных предложениях персонала буровой системы относительно мероприятий для избежания нежелательных событий, как описано выше. Фиг. 11 изображает дополнительные детали процессора 96, согласно предпочтительным вариантам осуществления изобретения. Предпочтительно, процессор 96 состоит из одного или нескольких центральных процессоров 350, оперативной памяти 352, модулей 354 обмена информацией или ввода/вывода, графических устройств 356, ускорителя 358 вычислений с плавающей запятой и накопителя,такого как ленты или диски 360. Хотя изобретение было раскрыто в связи с иллюстративными вариантами осуществления изобретения, описанными выше, после приведенного описания специалистам должны быть очевидны многие эквивалентные модификации и вариации. Соответственно, иллюстративные варианты осуществления изобретения, изложенного выше, должны считаться иллюстративными, а не ограничивающими. Различные изменения описанных вариантов осуществления могут быть выполнены, не отходя от сущности и не выходя за рамки изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ бурения при одновременном автоматическом детектировании состояния буровой установки во время процесса бурения ствола скважины, способ, содержащий этапы: осуществляют прием двух или более независимых каналов входных данных, причем каждый канал входных данных представляет последовательность измерений, выполненных во время процесса бурения; и автоматическое детектирование наиболее вероятного состояния буровой установки по меньшей мере из трех возможных состояний буровой установки, детектирование, основанное на двух или более входных каналах. 2. Способ по п.1, дополнительно содержащий этап изменения мероприятия, относящегося к бурению, на основе детектирования наиболее вероятного состояния буровой установки.- 19007837 3. Способ по п.1, дополнительно содержащий этап исследования данных, относящихся к процессу бурения, и/или характеристик земли, окружающей ствол скважины, собранных во время процесса бурения. 4. Способ по п.1, в котором два или более каналов входных данных представляют результаты измерений оборудования на буровой установке. 5. Способ по п.1, в котором два или более каналов входных данных включают два или несколько следующих входных каналов: нагрузка на крюк, положение блока, крутящий момент или давление водозаборной колонны. 6. Способ по п.1, в котором этап приема включает по меньшей мере три независимых входных канала, и детектирование основано по меньшей мере на трех входных каналах. 7. Способ по п.5, в котором этап приема включает по меньшей мере четыре независимых входных канала, и детектирование основано по меньшей мере на четырех входных каналах. 8. Способ по п.1, в котором этап детектирования дополнительно содержит генерацию вероятности,ассоциированной с каждым возможным состоянием буровой установки. 9. Способ по п.1, дополнительно содержащий этап прогнозирования будущего состояния буровой установки частично на основе текущего состояния буровой установки. 10. Способ по п.1, в котором наиболее вероятное состояние детектируется по меньшей мере из четырех возможных состояний буровой установки. 11. Способ по п.10, в котором наиболее вероятное состояние детектируется по меньшей мере из шести возможных состояний буровой установки. 12. Способ по п.11, в котором наиболее вероятное состояние детектируется по меньшей мере из 10 возможных состояний буровой установки. 13. Способ по п.1, в котором по меньшей мере три возможных состояния буровой установки включают три или более из следующих состояний буровой установки: бурение в роторном режиме (DrillRot),бурение в скользящем режиме (DrillSlide), разбуривание в(RihPumpRot), скольжение в(RihPump),операция cnycкa (Rih), разбуривание из(PoohPumpRot), скольжение из( PoohPump), операция подъема (Pooh), циркулирующий и роторный режим (StaticPumpRot), циркулирующий режим (StaticPump), на расстоянии от дна (Static), в клиновых захватах (InSlips) и неклассифицированное. 14. Способ по п.1, в котором этап автоматического детектирования использует алгоритм нечеткой логики. 15. Способ по п.1, в котором этап автоматического детектирования использует вероятностный метод. 16. Способ по п.1, в котором этап автоматического детектирования использует байесовский метод. 17. Способ по п.1, в котором этап автоматического детектирования использует последовательный байесовский метод. 18. Способ по п.1, в котором на этапе автоматического детектирования используется метод фильтрации частиц. 19. Способ по п.1, в котором на этапе автоматического детектирования используется метод параметрической фильтрации частиц. 20. Способ по п.1, в котором наиболее вероятное состояние буровой установки детектируется путем вычисления распределения вероятностей возможных состояния буровой установки, используя вероятностную модель, причем вероятностная модель основана на точках перехода и параметрах между точками перехода, где точки перехода выводятся из двух или более входных каналов. 21. Способ по п.20, в котором точки перехода детектируются отдельно для каждого входного канала. 22. Способ по п.21, в котором точки перехода детектируются с использованием последовательного байесовского метода. 23. Способ по п.1, в котором на этапе автоматического детектирования используется метод фильтрации Кальмана. 24. Способ по п.1, в котором этап автоматического детектирования основан, по меньшей мере, частично на двоичных индикаторах из системы сбора данных бурения. 25. Способ по п.24, в котором двоичные индикаторы включают "буровая коронка на дне" и "буровая коронка не на дне". 26. Способ по п.24, в котором двоичные индикаторы включают "в клиновых захватах", "не в клиновых захватах". 27. Способ по п.1, дополнительно содержащий этап обнаружения события бурения, по меньшей мере, частично на основе (i) автоматически детектированного наиболее вероятного состояния буровой установки и (ii) другой информации. 28. Способ по п.27, в котором упомянутый этап обнаружения события бурения осуществляется автоматически. 29. Способ по п.27, в котором этап обнаружения события бурения включает сравнение значений,выведенных из другой информации с пороговыми значениями, и в зависимости от автоматически детек- 20007837 тированного наиболее вероятного состояния используются различные пороговые значения. 30. Способ по п.28, в котором обнаруженное событие бурения представляет собой эрозию ствола. 31. Способ по п.28, в котором обнаруженноесобытие бурения представляет собой захват трубы. 32. Способ по п.28, в котором обнаруженное событие бурения представляет собой предварительно заданный уровень износа буровой коронки. 33. Способ по п.28, в котором этап обнаружения события бурения включает анализ тенденции. 34. Способ по п.28, в котором этап обнаружения события бурения включает анализ крутящего момента и гидродинамического сопротивления. 35. Способ по п.28, дополнительно содержащий этап уведомления обслуживающего персонала буровой установки об обнаруженном событии. 36. Способ по п.35, в котором обнаруженное событие является нежелательным, и уведомление представляет собой предупреждающий сигнал о нежелательном событии. 37. Способ по п.28, дополнительно содержащий этап предложения обслуживающему персоналу буровой установки действия в ответ на обнаруженное событие. 38. Способ по п.27, в котором обнаружение события бурения производится частично в ручном режиме. 39. Способ по п.38, в котором другая информация включает данные MWD (скважинные исследования в процессе бурения). 40. Способ по п.39, в котором обнаруженное событие представляет собой разрушительные виды колебаний. 41. Способ по п.28, в котором событие обнаруживается, используя информацию, взятую из модели земли. 42. Способ по п.1, в котором автоматическое детектирование основано частично на знании базовой информации. 43. Способ по п.1, в котором упомянутые этапы приема и автоматического детектирования повторяются так, чтобы в течение некоторого периода времени детектировались наиболее вероятные состояния буровой установки. 44. Система бурения при одновременном автоматическом детектировании состояния буровой установки во время процесса бурения ствола скважины, содержащая систему накопления, выполненную с возможностью приема двух или более независимых каналов входных данных, причем каждый канал входных данных представляет последовательность измерений, выполненных во время процесса бурения; и систему обработки, адаптированную и спрограммированную для автоматического детектирования наиболее вероятного состояния буровой установки по меньшей мере из трех возможных состояний буровой установки, детектирование, основанное на двух или более входных каналах. 45. Система бурения по п.44, дополнительно содержащая интерфейс пользователя для отображения информации, основанной на детектированном наиболее вероятном состоянии буровой установки, персоналу буровой, так, чтобы изменять операции бурения. 46. Система бурения по п.44, в которой два или несколько каналов входных данных представляют измерения оборудования на буровой установке. 47. Система бурения по п.44, в которой система накопления, выполненная с возможностью приема по меньшей мере трех независимых входных каналов данных, и детектирование основано по меньшей мере на трех входных каналах. 48. Система бурения по п.44, в которой система обработки дополнительно адаптируется и программируется для генерации вероятности, ассоциированной с каждым возможным состоянием буровой установки, и для детектирования будущих состояний буровой установки, основанного частично на вероятности текущего состояния буровой установки. 49. Система бурения по п.44, в которой система обработки детектирует наиболее вероятное состояние буровой установки, используя вероятностный метод. 50. Система бурения по п.49, в которой вероятностный метод включает последовательный байесовский метод, основанный на фильтрации частиц. 51. Система бурения по п.49, в которой система обработки детектирует наиболее вероятное состояние буровой установки посредством вычисления распределения вероятностей возможных состояний буровой установки, используя вероятностную модель, причем вероятностная модель основана на точках перехода и параметрах между точками перехода, где точки перехода выводятся из двух или более входных каналов. 52. Система бурения по п.51, в которой точки перехода детектируются отдельно для каждого входного канала. 53. Система бурения по п.52, в которой точки перехода детектируются с использованием последовательного байесовского метода. 54. Система бурения по п.44, в которой система обработки дополнительно адаптируется и программируется для обнаружения события бурения, по меньшей мере, частично на основе (i) автоматически детектированного наиболее вероятного состояния буровой установки и (ii) другой информации.- 21007837 55. Система бурения по п.54, в которой обнаружение события бурения осуществляется автоматически. 56. Система бурения по п.55, в которой обнаружение события бурения частично осуществляется,используя информацию, взятую из модели земли. 57. Считываемый компьютером носитель, способный заставлять компьютерную систему осуществлять следующие этапы во время процесса бурения ствола скважины: прием двух или более независимых каналов входных данных, причем каждый канал входных данных представляет последовательность измерений, выполненных во время процесса бурения; автоматическое детектирование наиболее вероятного состояния буровой установки по меньшей мере из трех возможных состояний буровой установки, детектирование, основанное на двух или более входных каналах; и отображение информации, основанной на детектированном наиболее вероятном состоянии буровой установки, персоналу буровой установки, так, чтобы изменить операцию бурения. 58. Носитель по п.57, дополнительно способный заставлять компьютерную систему осуществлять этап изменения операций, относящихся к бурению, на основе детектирования наиболее вероятного состояния буровой установки. 59. Носитель по п.57, в котором детектирование основано по меньшей мере на трех входных каналах. 60. Носитель по п.57, в котором вероятность, связанная с каждым возможным состоянием буровой установки, генерируется компьютерной системой. 61. Носитель по п.57, в котором компьютерная система детектирует наиболее вероятное состояние буровой установки, используя вероятностный метод. 62. Носитель по п.61, в котором вероятностный метод включает последовательный байесовский метод, основанный на фильтрации частиц. 63. Носитель по п.61, в котором вероятностный метод включает анализ точек перехода и параметров для сегментов между точками перехода, выведенными из двух или нескольких входных каналов. 64. Носитель по п.57, в котором компьютерная система дополнительно вынуждается обнаруживать событие бурения, по меньшей мере, частично на основе (i) автоматически детектированного наиболее вероятного состояния буровой установки и (ii) другой информации. 65. Носитель по п.57, в котором обнаружение события бурения осуществляется автоматически.
МПК / Метки
МПК: E21B 44/00
Метки: детектирования, состояния, установки, способ, буровой, система
Код ссылки
<a href="https://eas.patents.su/28-7837-sistema-i-sposob-dlya-detektirovaniya-sostoyaniya-burovojj-ustanovki.html" rel="bookmark" title="База патентов Евразийского Союза">Система и способ для детектирования состояния буровой установки</a>
Каротажная система для ствола буровой скважины
Номер патента: 3565
Опубликовано: 26.06.2003
Автор: Руниа Дауве Йоханнес
МПК: E21B 49/10
Метки: буровой, система, скважины, каротажная, ствола
Формула / Реферат:
1. Каротажная система для использования в буровой скважине, сформированной в геологической формации, содержащая трубчатый элемент, который устанавливается в буровой скважине, и каротажный элемент, включающий в себя трубу, имеющую входное отверстие и выполненную с возможностью перемещения в радиальном направлении трубчатого элемента между втянутым положением, в котором каротажный элемент, по существу, размещается внутри трубчатого элемента, и...
Способ улучшения свойств жидкости для бурения скважин, способ улучшения смазывающих свойств буровой жидкости для бурения скважин, способ снижения вращающего момента и гидродинамического сопротивленияпри вращении, поднятии или опускании бурильной трубы, способ контролирования потерь буровой жидкости из нефтяной нисходящей буровой скважины
Номер патента: 357
Опубликовано: 24.06.1999
Авторы: Залески Питер Л., Уейнтритт Дональд Дж., Деруин Дэвид Дж., Рассел Джордж У.
МПК: C09K 7/02
Метки: скважин, вращении, вращающего, опускании, буровой, потерь, способ, контролирования, нисходящей, поднятии, гидродинамического, снижения, трубы, бурения, сопротивленияпри, свойств, смазывающих, скважины, нефтяной, улучшения, жидкости, бурильной, момента
Формула / Реферат:
1. Способ улучшения свойств жидкости для бурения скважин, отличающийся тем, что он включает стадию добавления в буровую жидкость упругих частиц углерода в виде графита. 2. Способ по п.1, отличающийся тем, что названные упругие частицы имеют упругое восстановление после деформации сжатия под давлением 68948 кПа свыше около 35%. 3. Способ по п.2, отличающийся тем, что названные упругие частицы имеют упругое восстановление после деформации сжатия...
Промывочная жидкость буровой скважины, включающая смазочную композицию, способ регулирования смазывания промывочной жидкостью буровой скважины, применение способа к промывочным жидкостям с высоким значением ph
Номер патента: 4204
Опубликовано: 26.02.2004
Авторы: Одибер-Айе Анни, Аржиллье Жан-Франсуа, Янссен Мишель, Демулэн Андре
МПК: C10M 173/02, C09K 7/00
Метки: промывочным, промывочной, смазывания, композицию, жидкостям, буровой, промывочная, смазочную, высоким, значением, способ, включающая, скважины, регулирования, жидкость, способа, применение, жидкостью
Формула / Реферат:
1. Промывочная жидкость буровой скважины на основе воды, отличающаяся тем, что она включает смазочную композицию, содержащую по крайней мере одно неионное амфифильное соединение, получаемое путем реакции по крайней мере одного растительного масла по крайней мере с одним аминоспиртом, при этом растительное масло полимеризовано и имеет вязкость 5-60 Паъс при температуре 20шC. 2. Промывочная жидкость по п.1, отличающаяся тем, что растительное масло...
Буровая система с устройством для крепления к буровой скважине и способы начала и завершения бурильного прохода с ее использованием
Номер патента: 1110
Опубликовано: 30.10.2000
Автор: Бест Брюно
МПК: E21B 4/18
Метки: прохода, завершения, буровой, скважине, система, способы, устройством, использованием, буровая, крепления, начала, бурильного
Формула / Реферат:
1. Система сверхглубокого бурения для бурения скважины в земной коре, содержащая бурильное долото (11), двигатель (10) для привода бурильного долота (11), достигающее поверхности удлиненное тело (1), гидравлическое цилиндропоршневое устройство (7, 9), способное создавать заданную нагрузку на долото и соединенное только с одним первым выбранным элементом - цилиндром (7) или поршнем (9) цилиндропоршневого устройства, бурильное долото (11),...
Система для регулирования рабочих давлений в подземной буровой скважине
Номер патента: 5470
Опубликовано: 24.02.2005
Авторы: Беркхард Алан, Чанг Линго, Сутер Роджер
МПК: E21B 7/00
Метки: рабочих, система, давлений, регулирования, скважине, подземной, буровой
Формула / Реферат:
1. Способ регулирования одного или нескольких рабочих давлений в подземной буровой скважине, содержащей трубчатый элемент, расположенный в стволе скважины и образующий кольцевое пространство между трубчатым элементом и стенкой ствола скважины, уплотнительный элемент для закрытия кольцевого пространства между трубчатым элементом и стенкой ствола скважины, насос для закачивания текучих сред в трубчатый элемент и автоматический штуцер для...
Предыдущий патент: Способ подтверждения подлинности печатной информации
Следующий патент: Конъюгированные цитокины, используемые для терапии опухолей
Случайный патент: Способы замедления отверждения чувствительных к влаге отверждаемых эластомеров