Система и способ для преобразования энергии волн в электрическую энергию
Формула / Реферат
1. Система преобразования энергии морских волн в электрическую энергию, содержащая
опорную конструкцию для установки на дне моря;
плавающее тело (1а, 1b, 1c, 1d, 1е, 100, 100а, 100b), выполненное с возможностью удержания на поверхности воды;
передаточный элемент (2, 2а, 2b, 2с, 2d, 2е), первый конец которого присоединен к плавающему телу, а второй конец находится в сообщении с устройством преобразования движения, содержащим электрический генератор, создающим электрический ток, когда передаточный элемент перемещается вверх и/или вниз под действием волнового движения массы воды, причем передаточный элемент представляет собой негибкий передаточный вал или стержень (2, 2а, 2b, 2с, 2d, 2е), присоединенный к плавающему телу шарнирным соединением (3), при этом первый конец передаточного элемента присоединен к плавающему телу в точке, соответствующей центру масс плавающего тела, или ниже этой точки, при этом передаточный элемент удерживается опорной конструкцией с возможностью прямолинейного перемещения вверх и вниз выше плавающего тела.
2. Система по п.1, в которой передаточный элемент вставлен в широкое отверстие в плавающем теле, расположенное на поверхности плавающего тела и обращенное в сторону генератора, при этом передаточный элемент с возможностью поворота присоединен к поверхности плавающего тела, расположенной с другой стороны указанного широкого отверстия.
3. Система по п.2, в которой указанное широкое отверстие покрыто гибкой мембраной, которая проходит от плавающего тела к передаточному элементу с обеспечением герметизации плавающего тела от массы воды.
4. Система по п.1, в которой плавающее тело изготовлено из легковесного материала.
5. Система по п.1, в которой плавающее тело является пустотелым.
6. Система по п.1, в которой плавающее тело изготовлено с симметричной формой относительно оси, проходящей через точку присоединения передаточного элемента к плавающему телу.
7. Система по любому из предшествующих пунктов, в которой плавающее тело содержит дополнительную массу, расположенную с возможностью перемещения вдоль вертикальной оси плавающего тела, при этом конкретное расположение указанной массы соответствует конкретному размеру волн или диапазону размеров волн.
8. Система по п.1, в которой передаточный элемент или плавающее тело расположены с возможностью поддержания плавающего тела частично погруженным во время работы системы.
9. Система по п.1, в которой устройство преобразования движения содержит подвижный магнит (10), расположенный внутри индукционной катушки (9), при этом передаточный элемент присоединен к магниту.
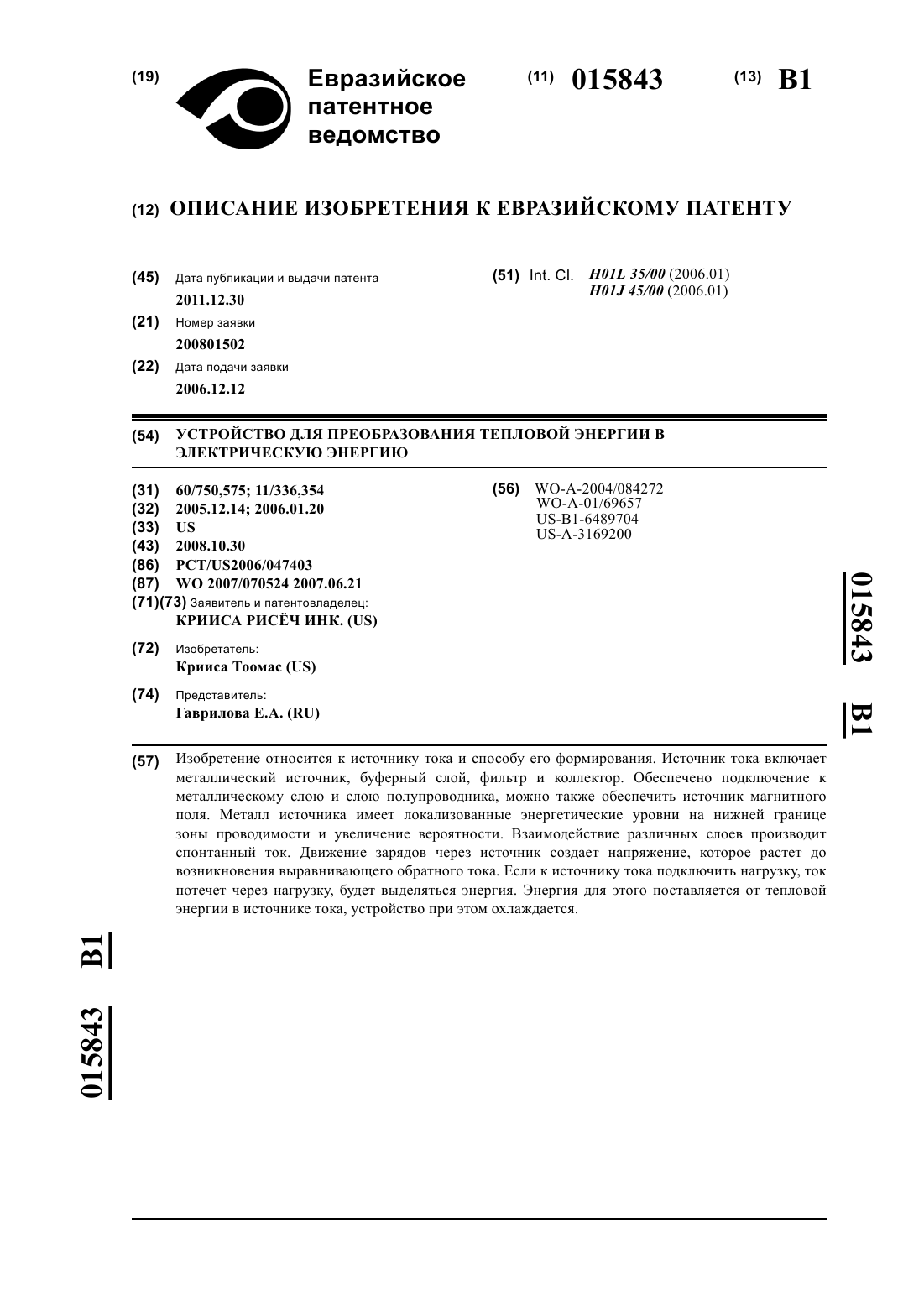
10. Система по п.1, в которой устройство преобразования движения содержит вал (19), соединенный с возможностью вращения с передаточным элементом, при этом вал (19) содержит одностороннюю муфту (21), которая подсоединена, когда передаточный элемент перемещается либо вверх, либо соответственно вниз, при этом, когда односторонняя муфта подсоединена, вращение вала (19) обеспечивает вращение еще одного вала (19а), который соединяет одностороннюю муфту с электрическим генератором (24).
11. Система по п.10, в которой устройство преобразования движения содержит по меньшей мере две односторонних муфты (21а, 21b), причем первая из указанных по меньшей мере двух односторонних муфт подсоединена, когда передаточный элемент перемещается вверх от дна моря, обеспечивая вращение первого вала в первом определенном направлении вращения, тогда как вторая из указанных двух односторонних муфт в это время находится в высвобожденном состоянии, а когда передаточный элемент перемещается вниз, первая односторонняя муфта находится в высвобожденном состоянии, тогда как вторая односторонняя муфта подсоединена, обеспечивая вращение второго вала во втором определенном направлении вращения, при этом система содержит выполненные с возможностью взаимодействия передачи (18а, 18b, 18с), взаимодействующие по меньшей мере с одной односторонней муфтой, а первый и второй валы обеспечивают одно и то же направление вращения подсоединенного генератора (24), независимо от направления перемещения передаточного элемента соответственно вверх или вниз.
12. Система по п.10 или 11, в которой по меньшей мере одна односторонняя муфта (21) подсоединена к генератору (24) через ротационный мультипликатор (22).
13. Система по п.10 или 11, в которой вал, присоединенный к генератору (24), содержит маховик (23).
14. Система по п.1, в которой опорная конструкция содержит по меньшей мере один горизонтальный опорный кронштейн, прикрепленный с возможностью перемещения к вертикальным кронштейнам опорной конструкции и поддерживающий устройство преобразования движения, электрический генератор и передаточный элемент, при этом перемещение указанного по меньшей мере одного горизонтального опорного кронштейна сохраняет относительное расположение устройства преобразования движения, электрического генератора и передаточного элемента.
15. Система по п.14, в которой указанный по меньшей мере один горизонтальный опорный кронштейн перемещается вертикально с обеспечением наименьшей возможной длины передаточного элемента, когда система приведена в действие.
16. Система по любому из предшествующих пунктов, содержащая по меньшей мере два плавающих тела.
17. Система по любому из предшествующих пунктов, содержащая большое количество плавающих тел, изготовленных с такой формой, что когда они расположены относительно друг друга, они образуют по меньшей мере одну сторону конструкции, которая выглядит как плоская поверхность, с обеспечением расположения системы перпендикулярно фронту приходящей воды, когда система расположена в массе воды.

Текст
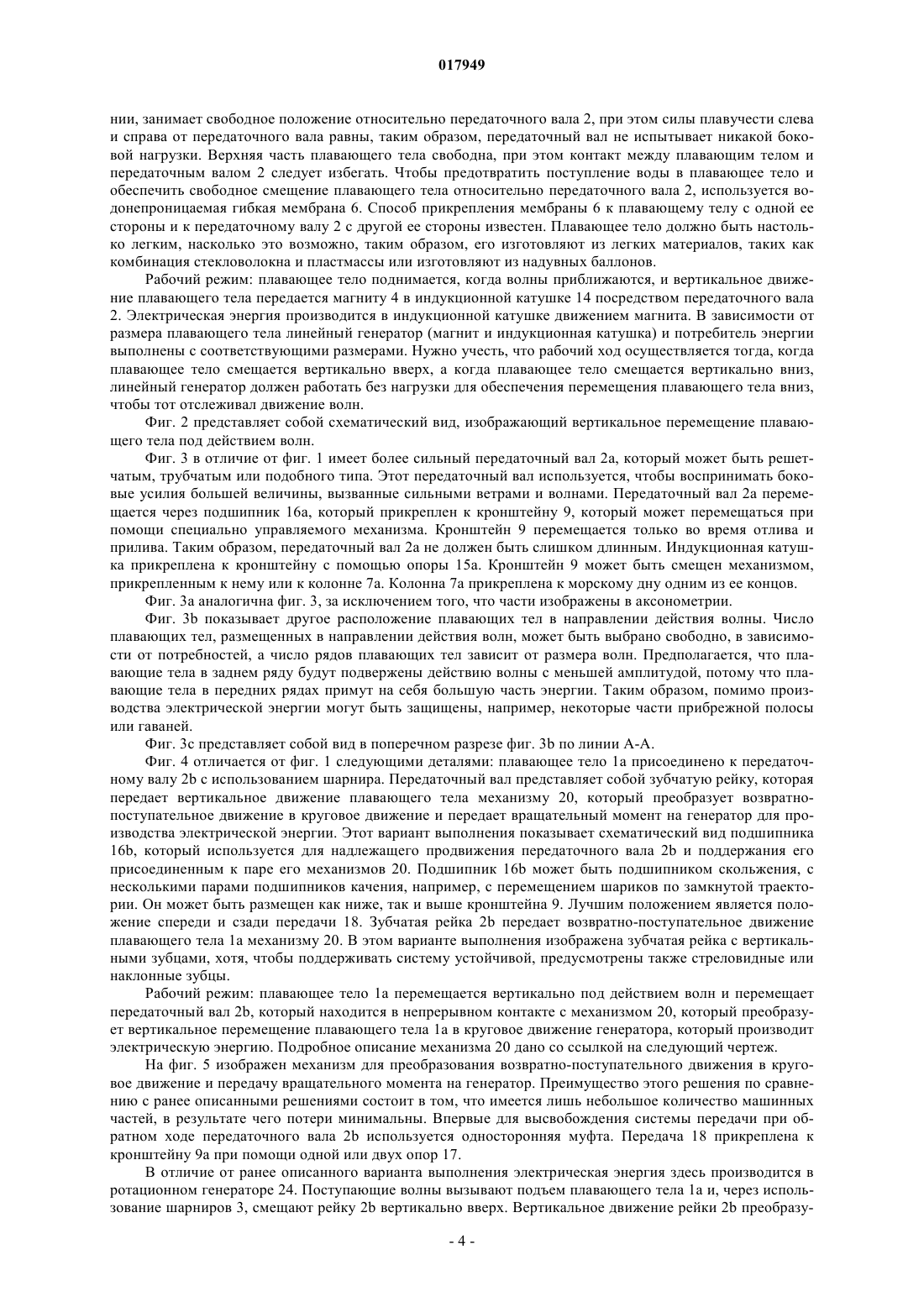
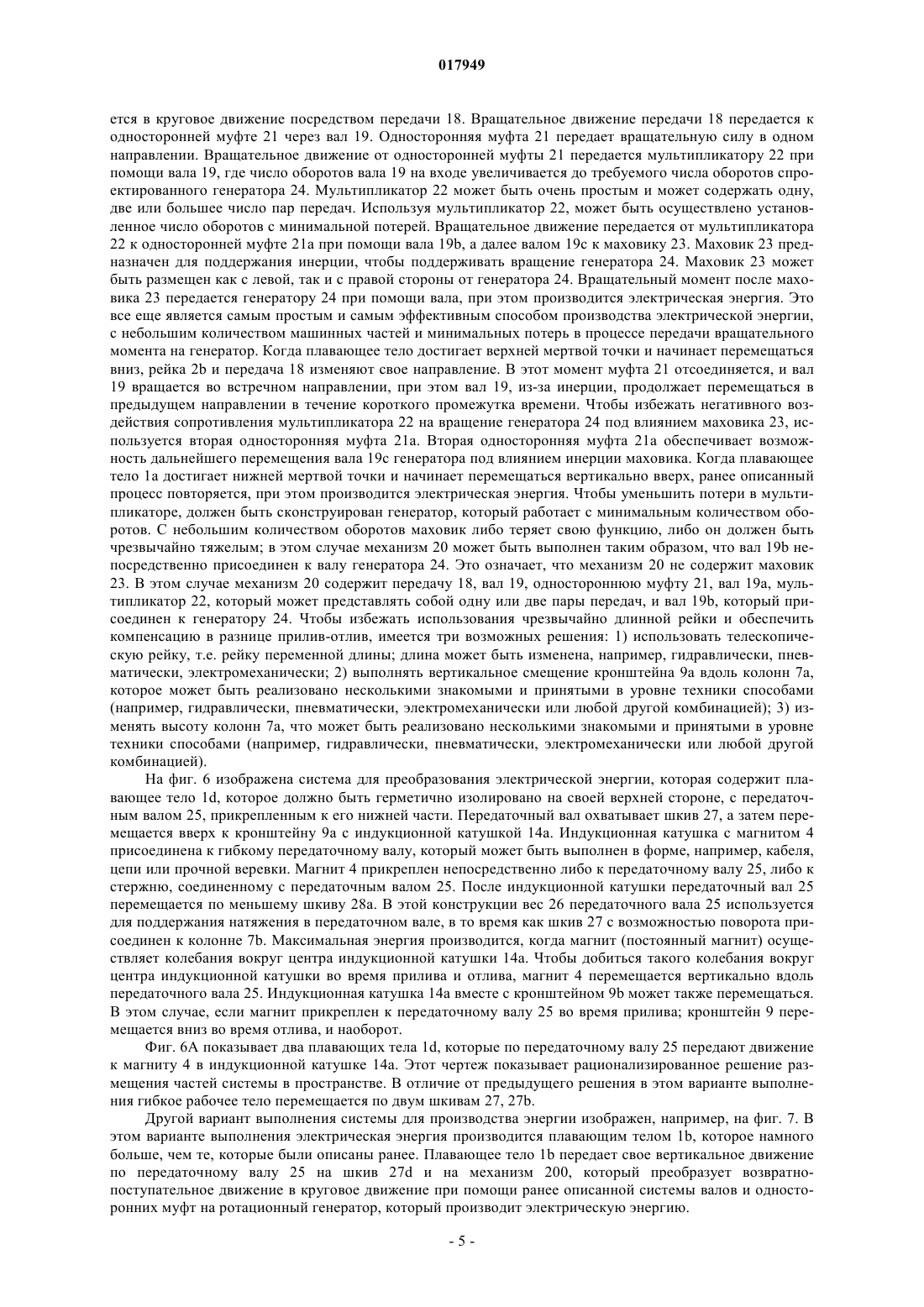
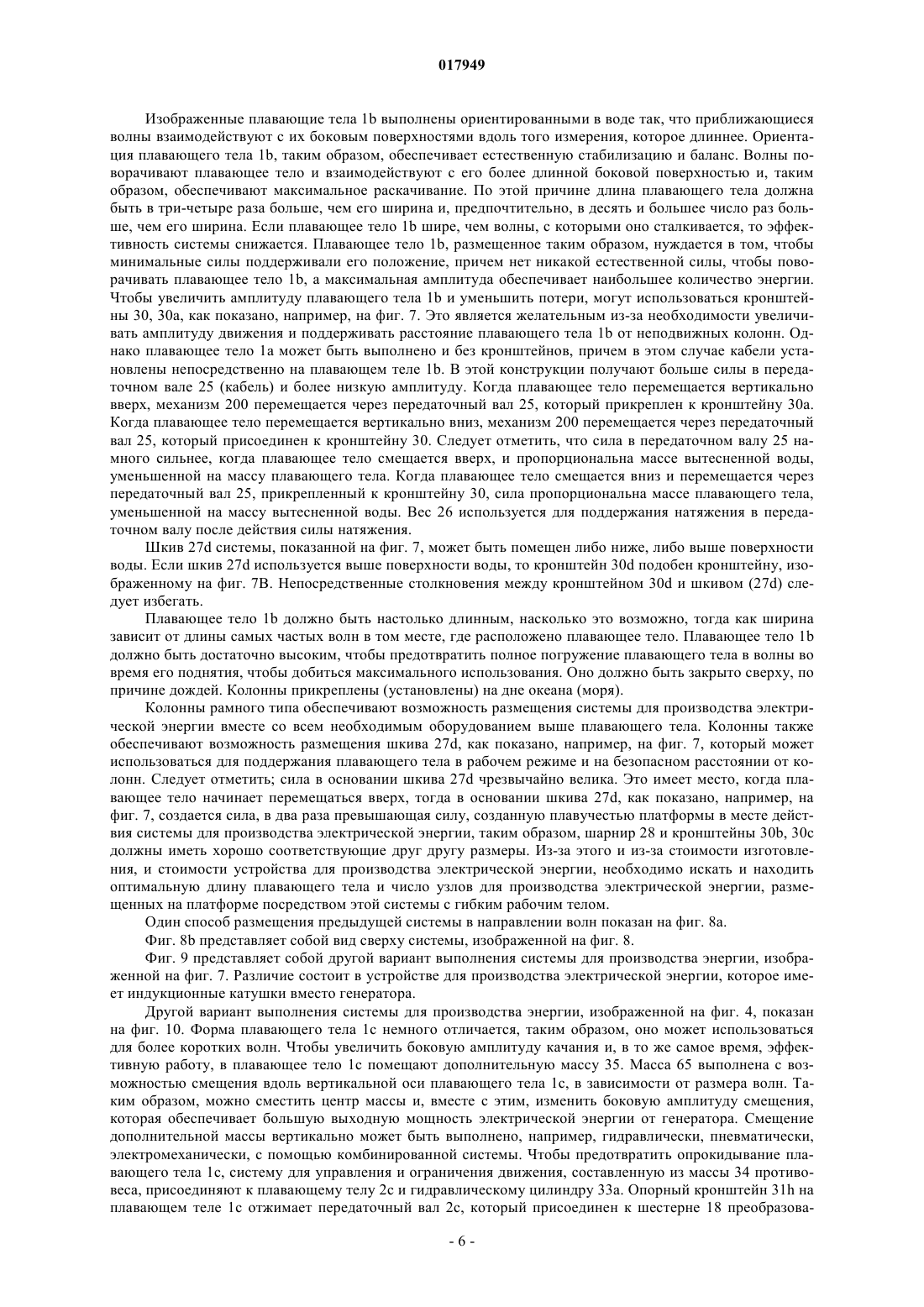
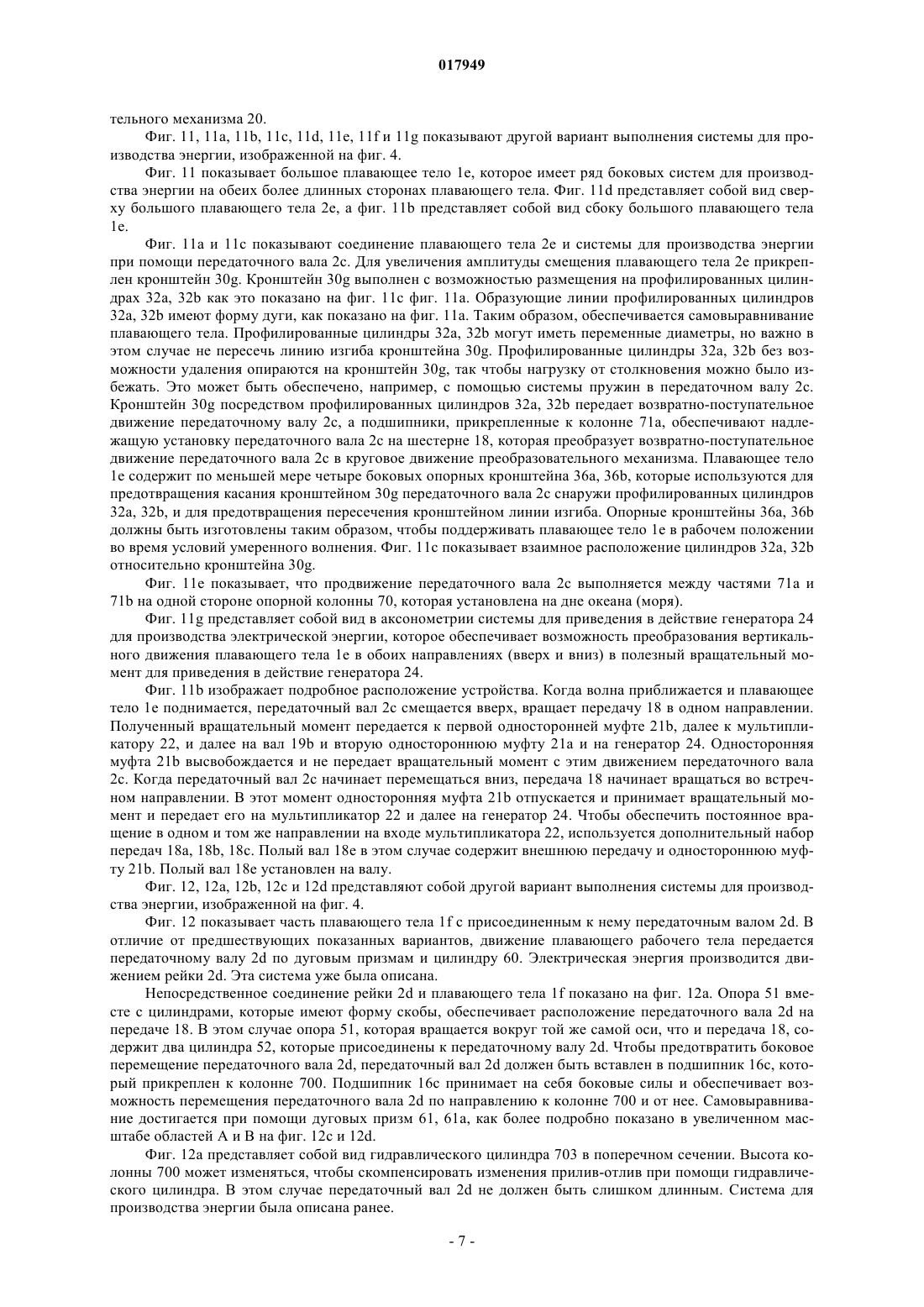
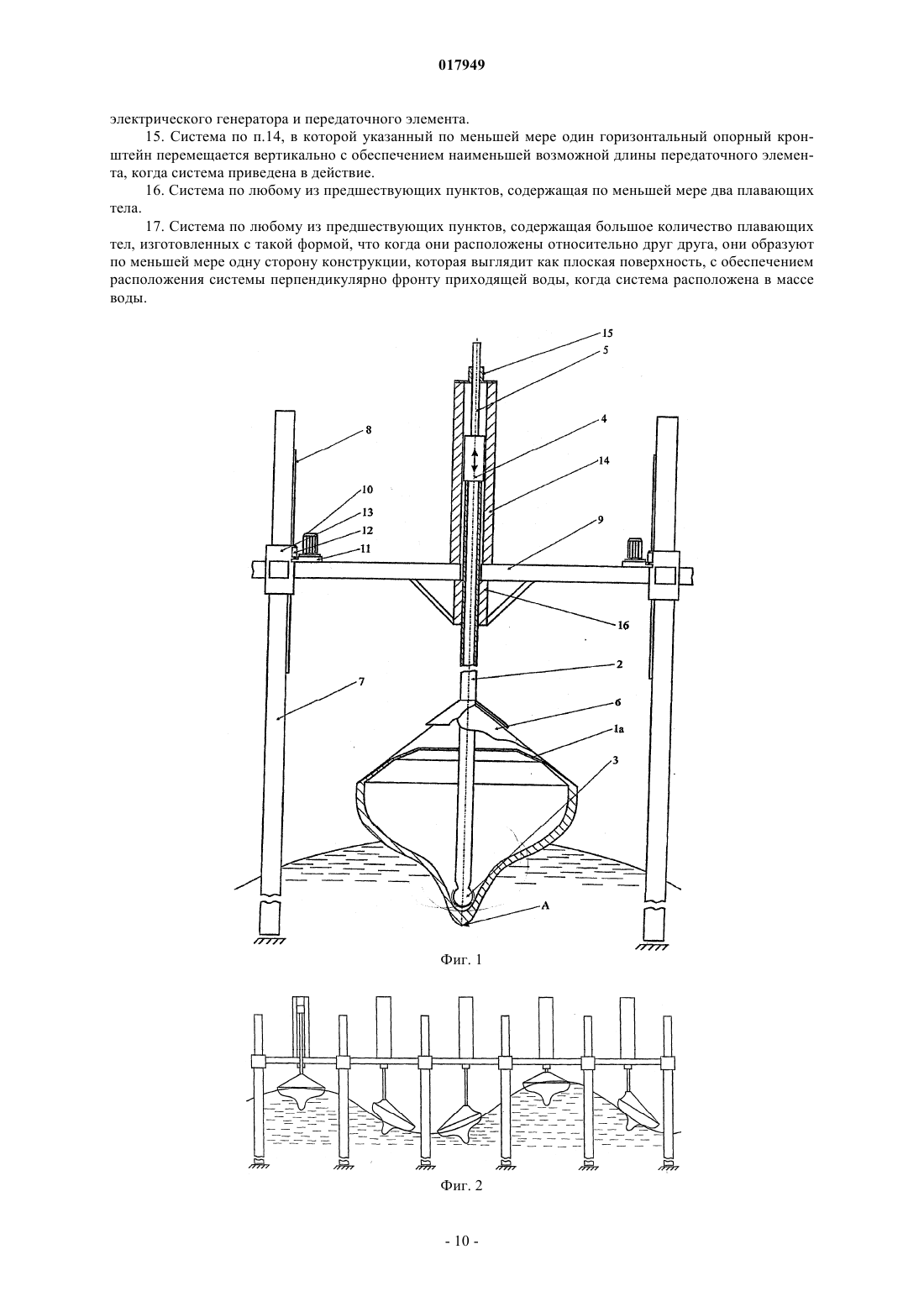
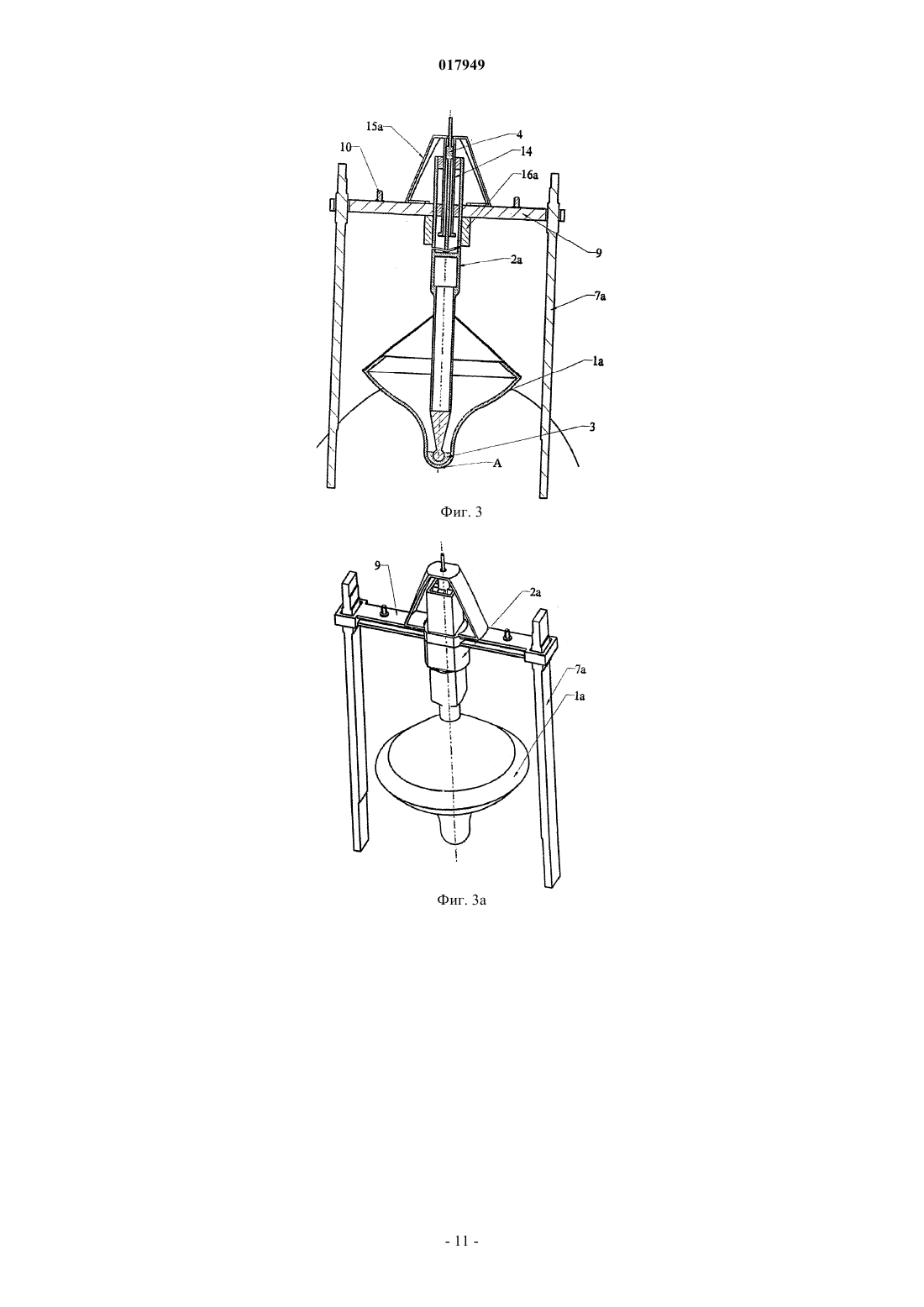
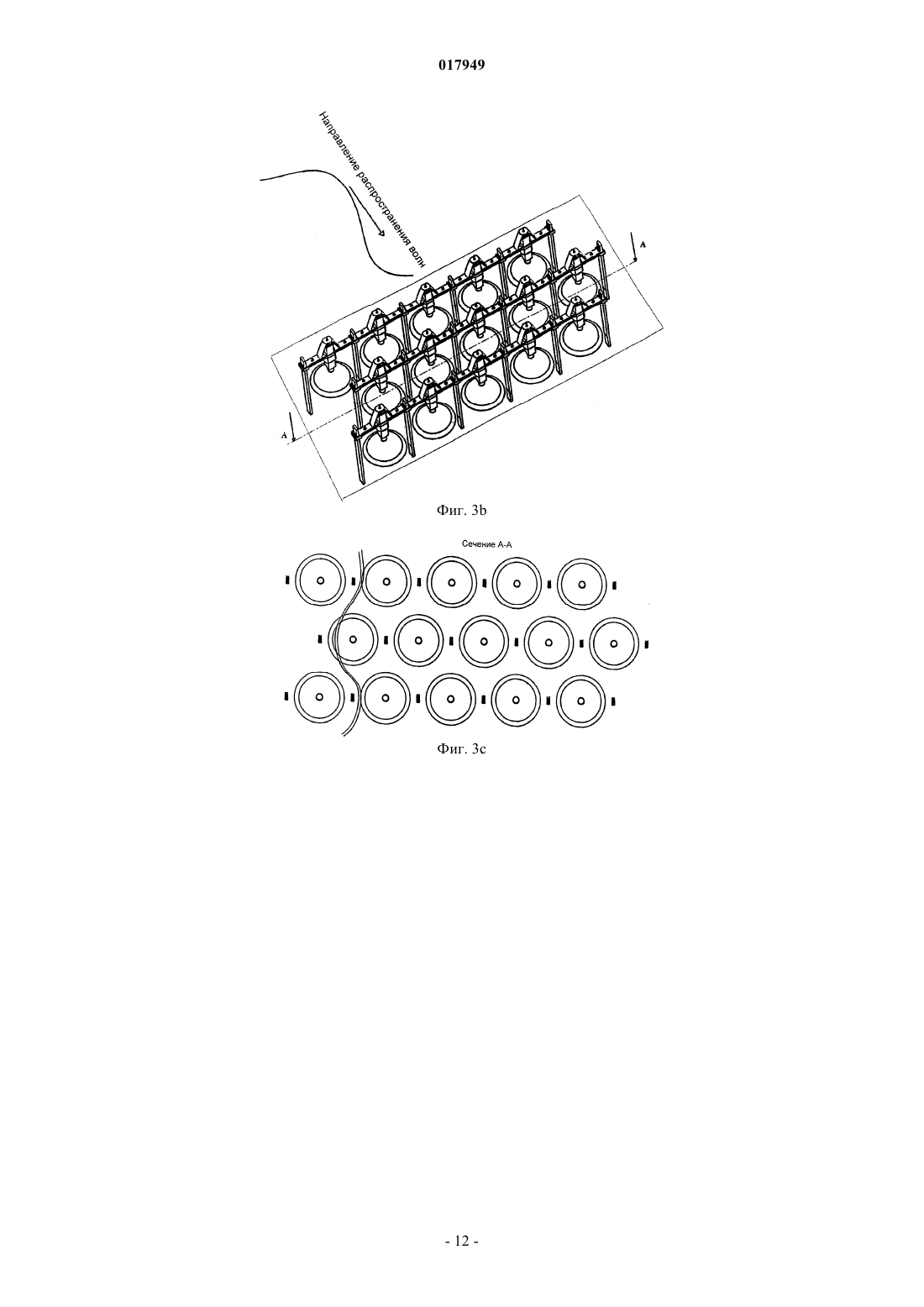
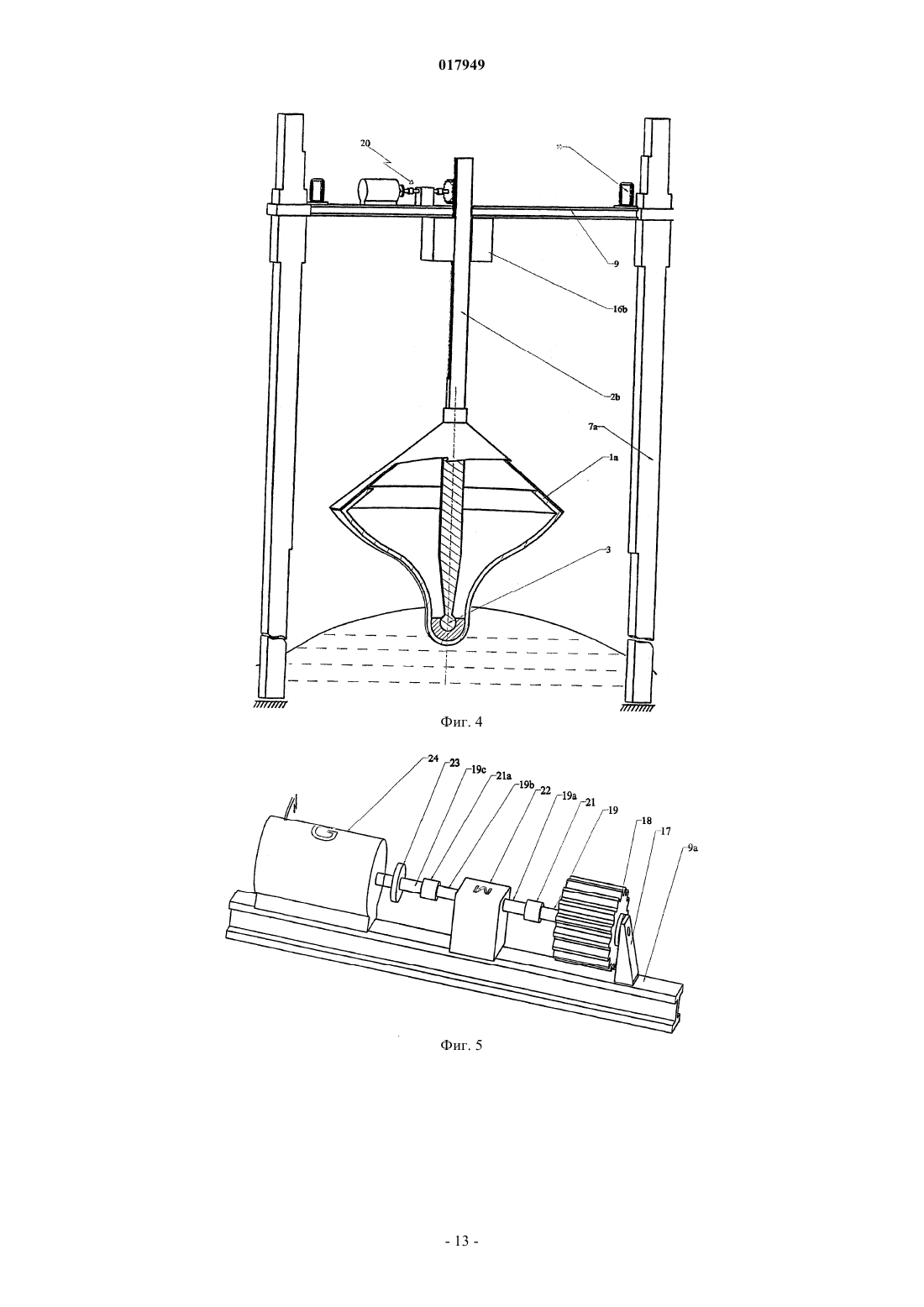
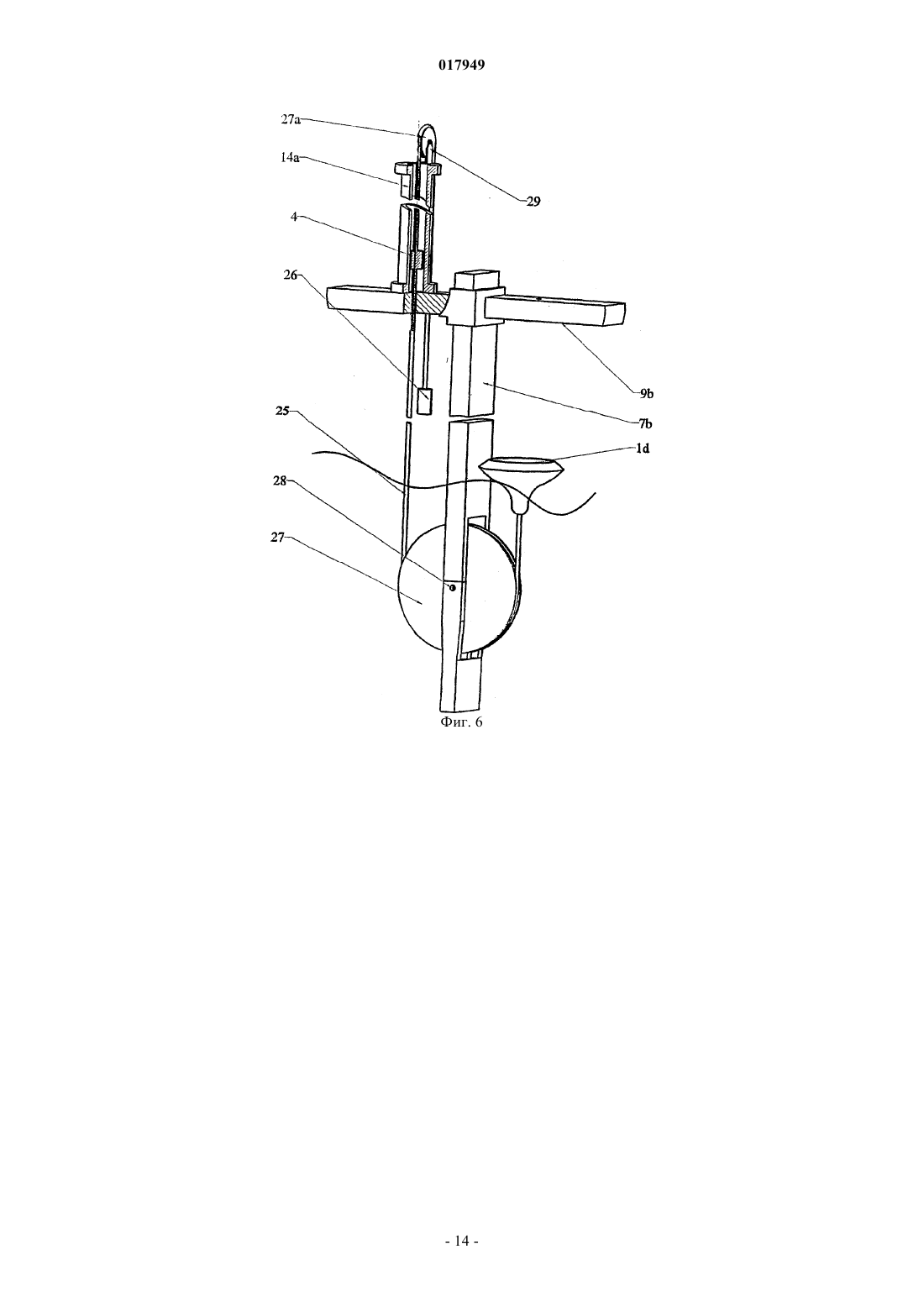
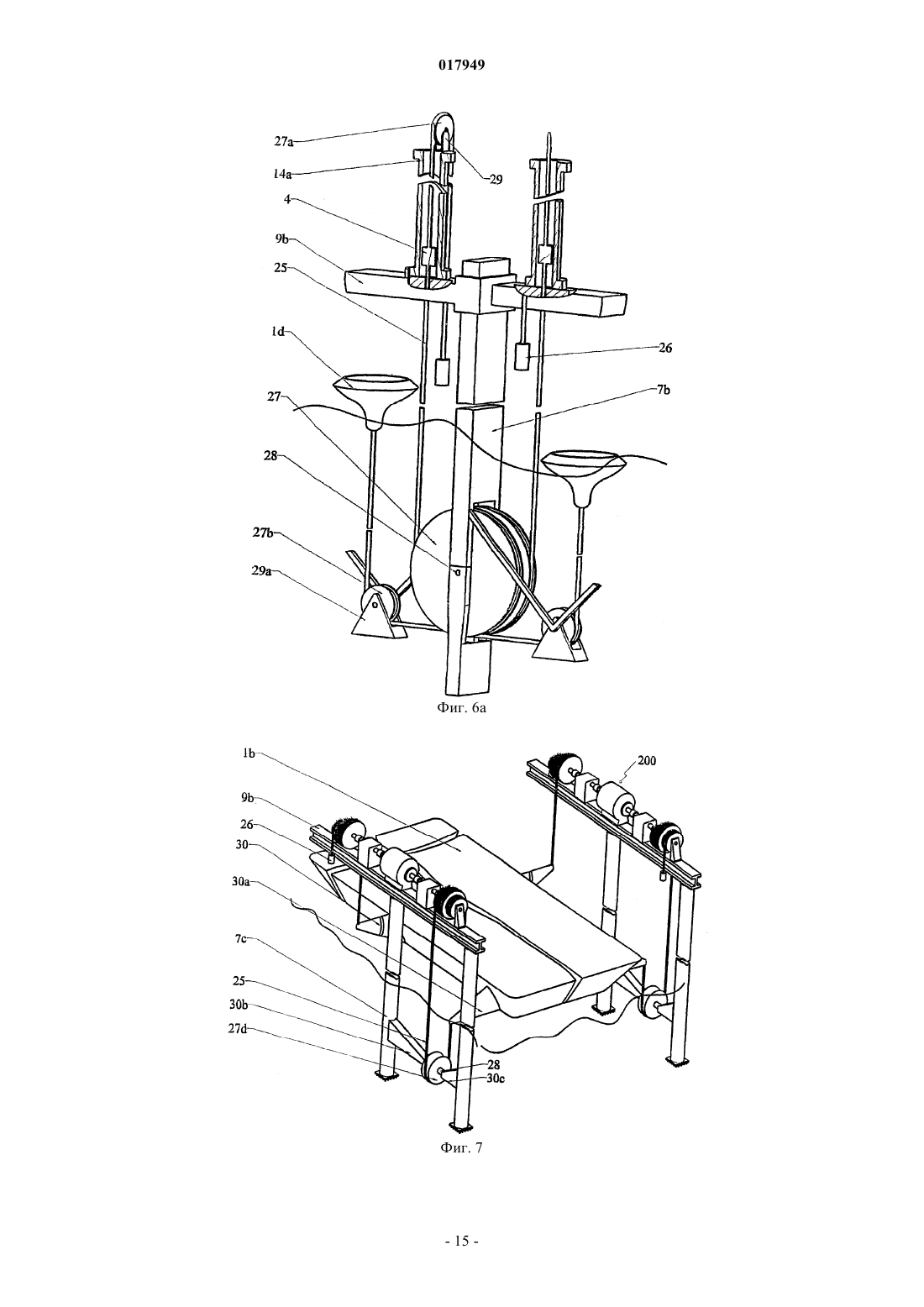
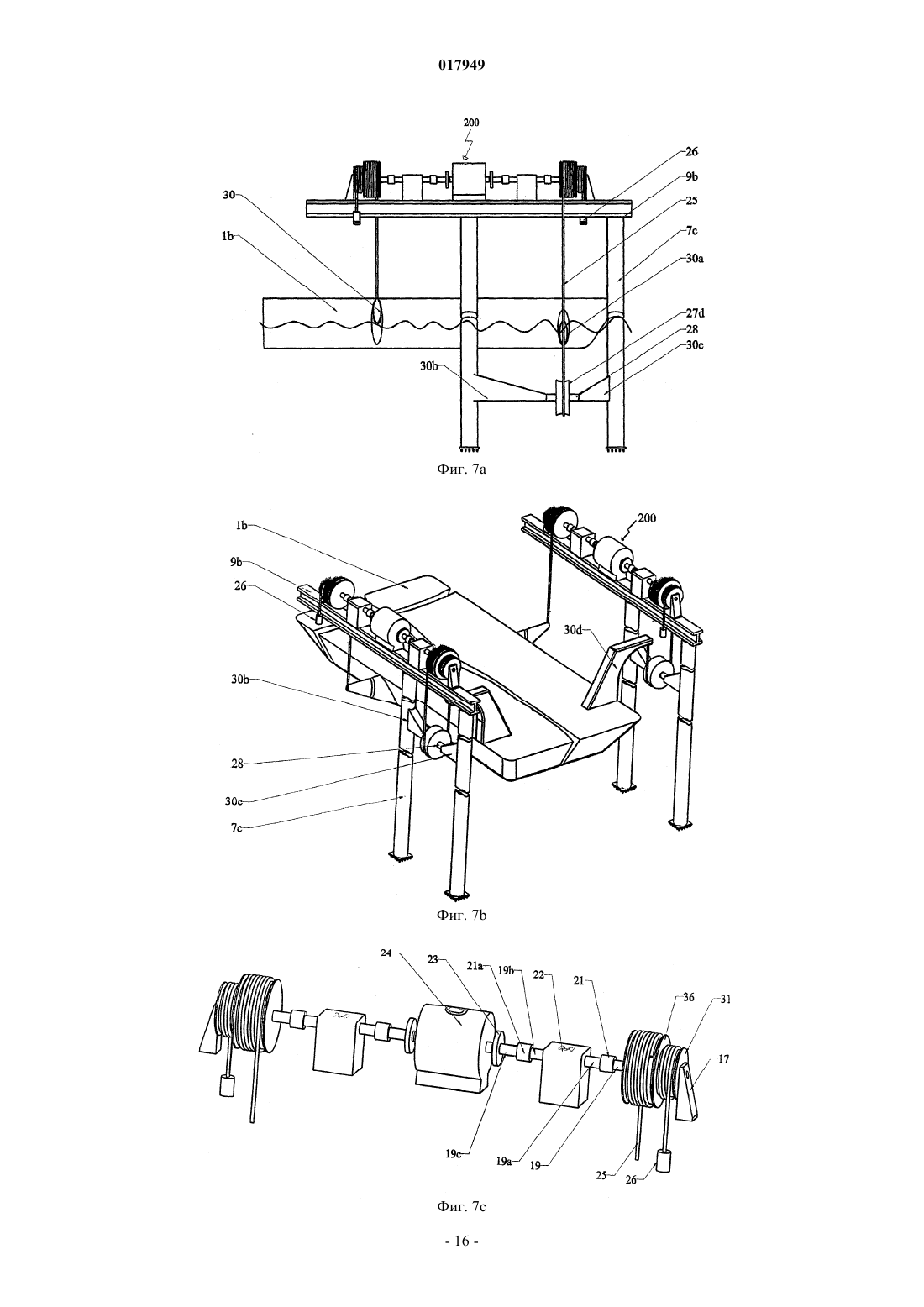
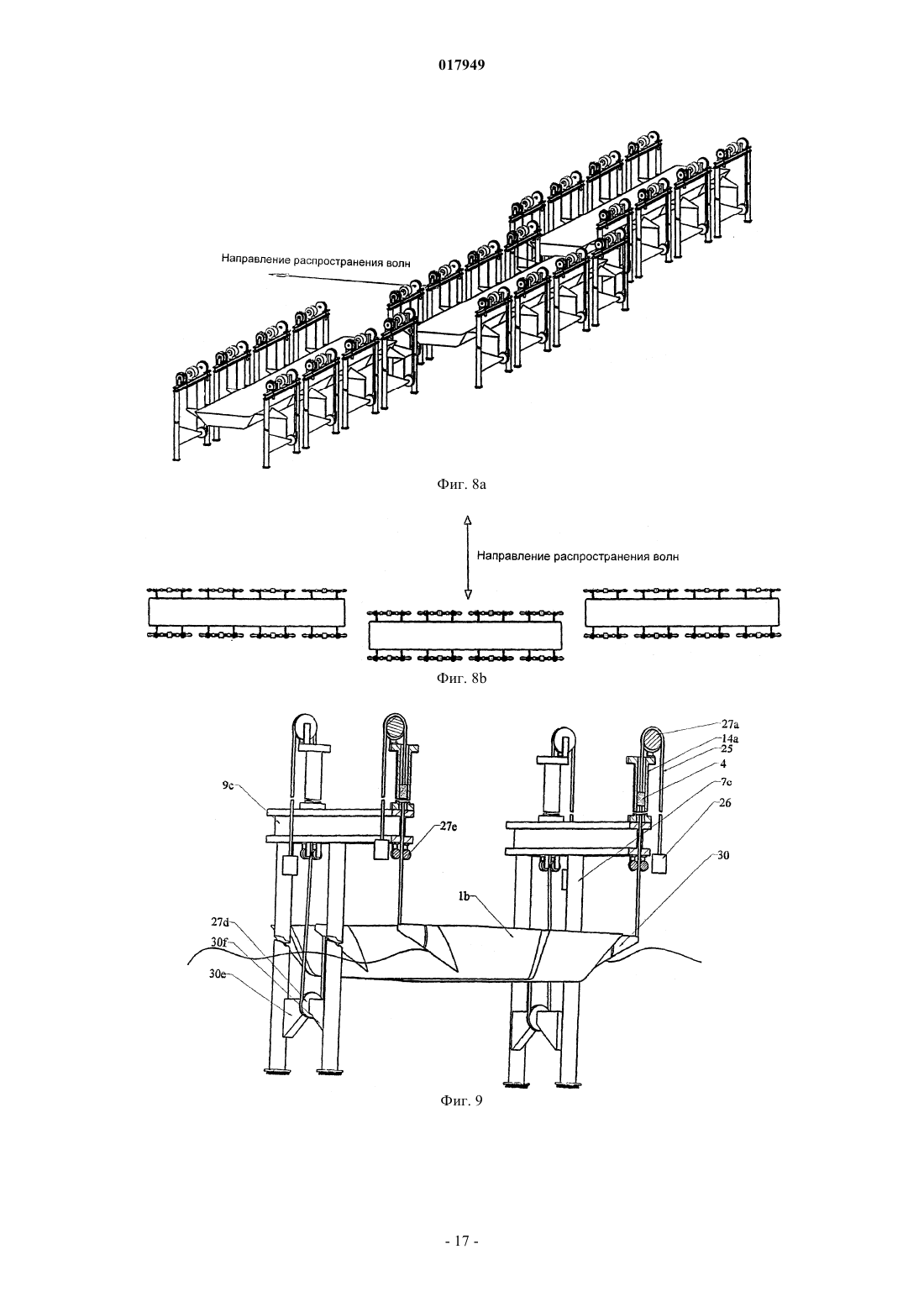
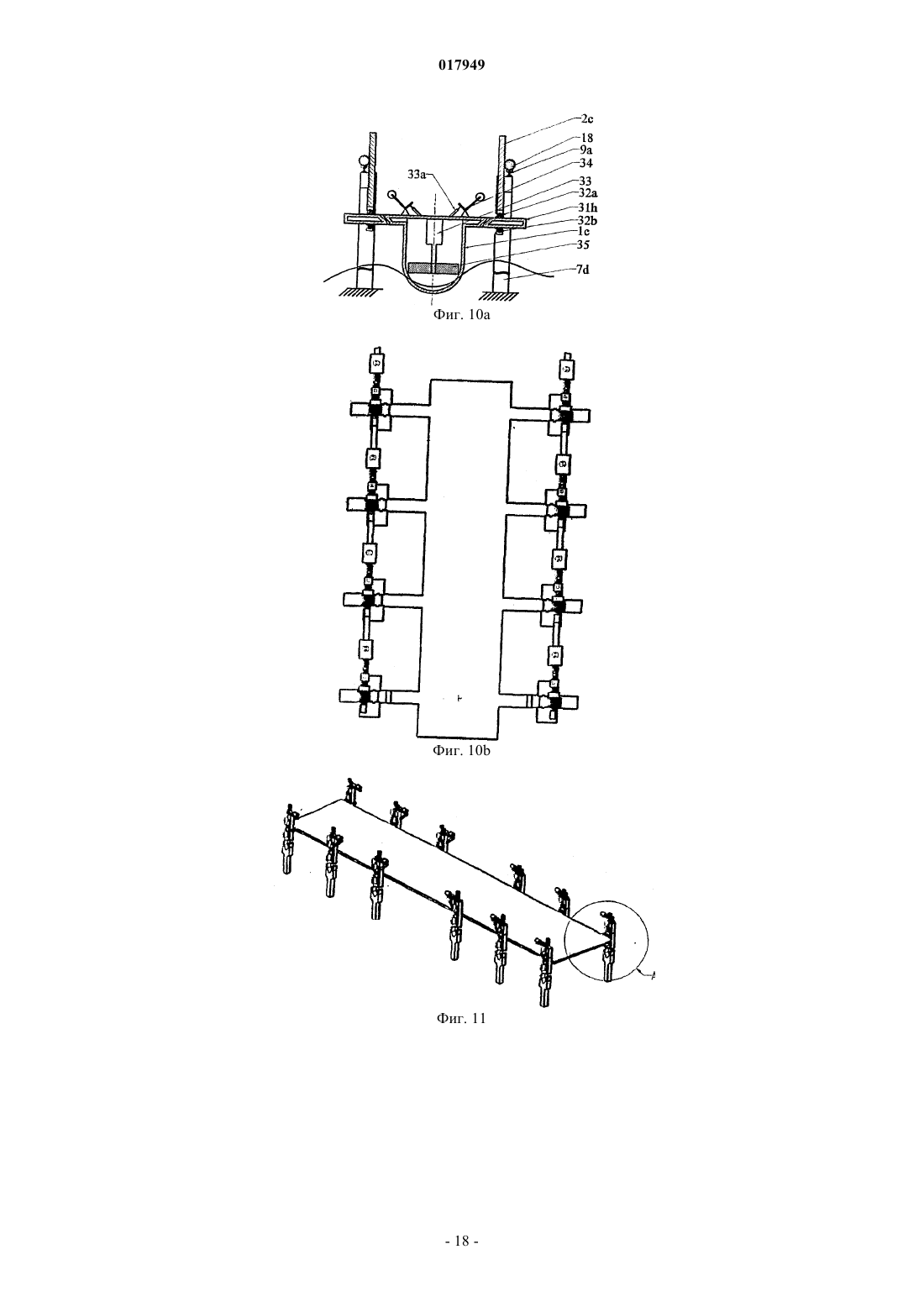
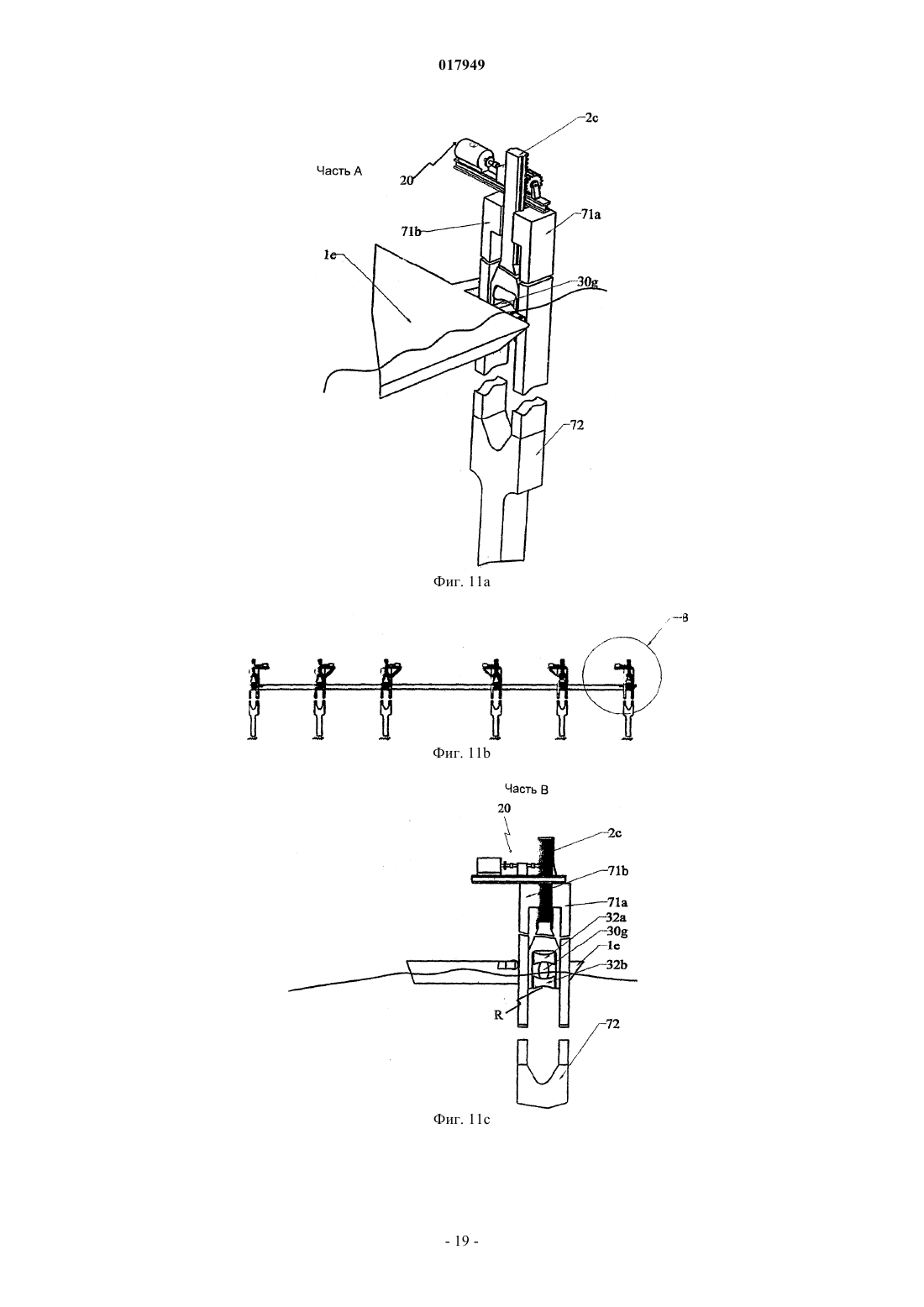
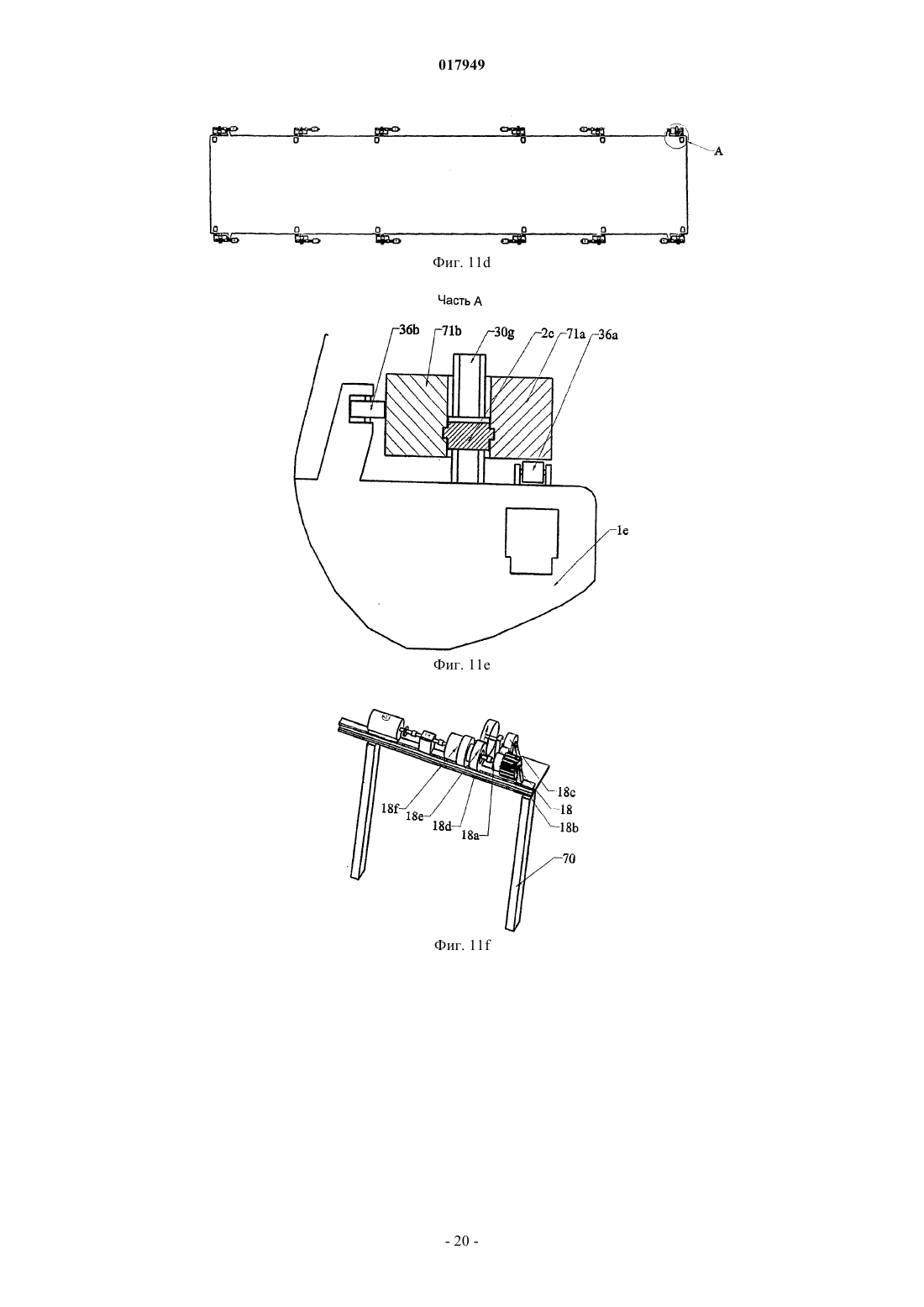
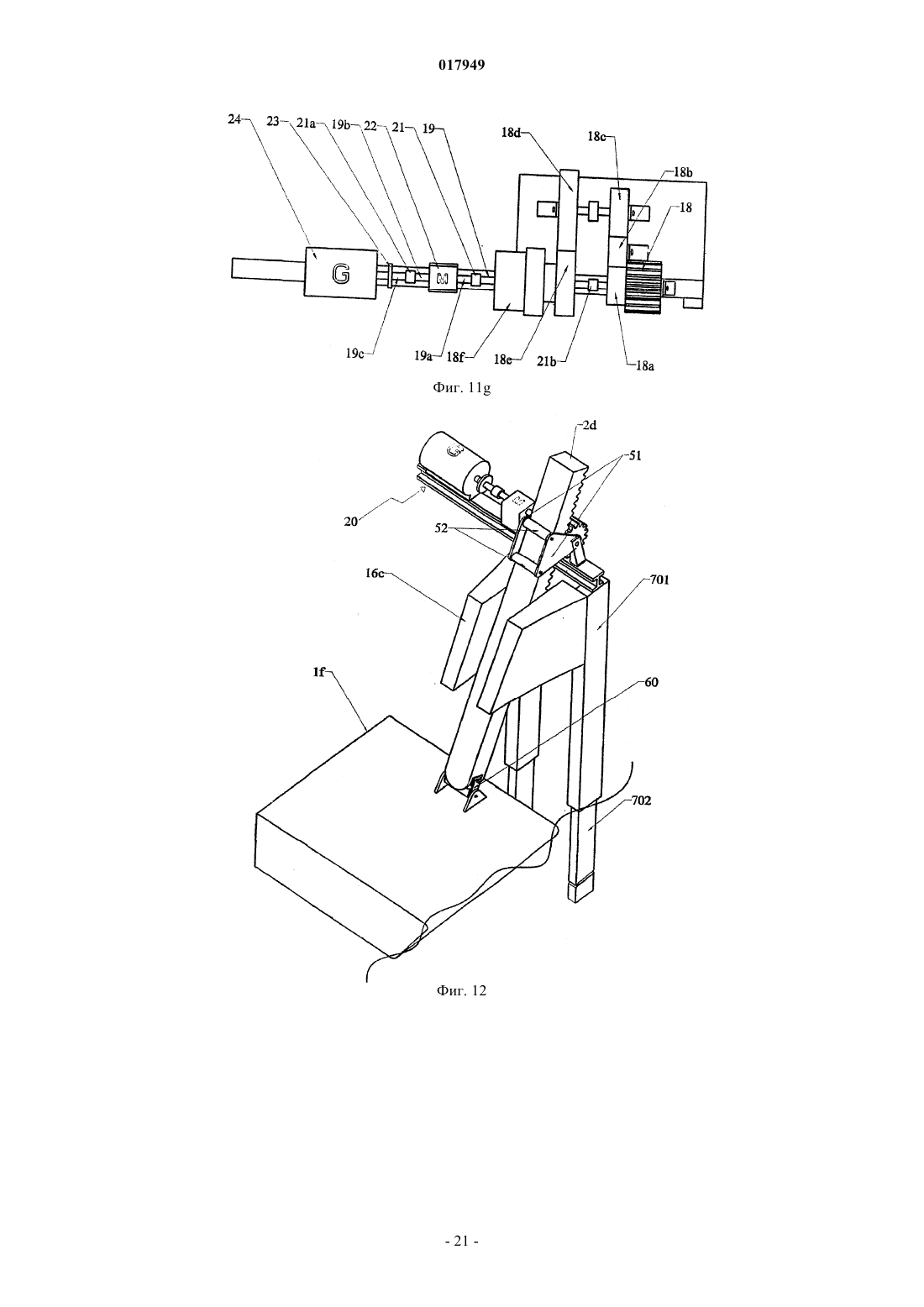
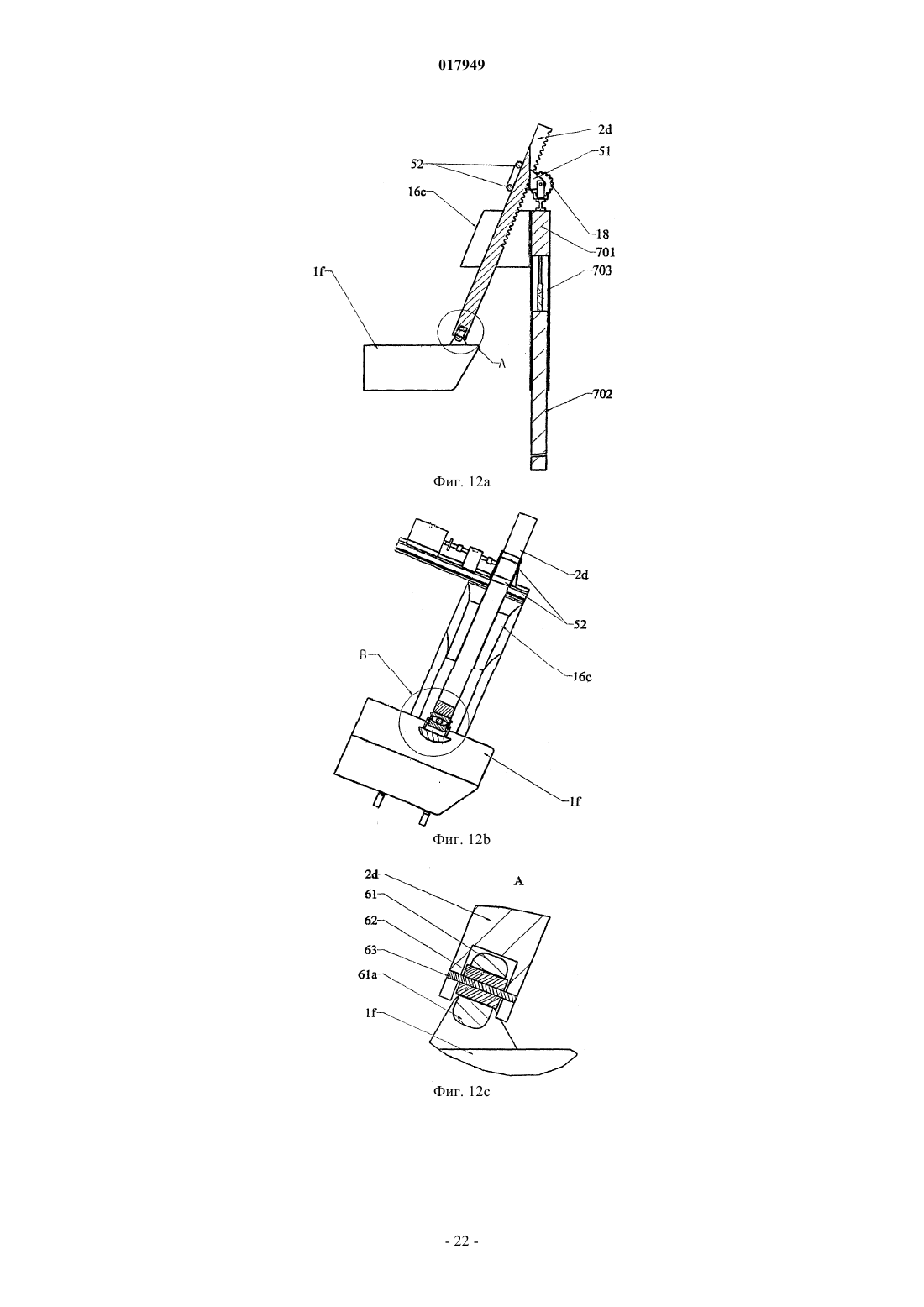
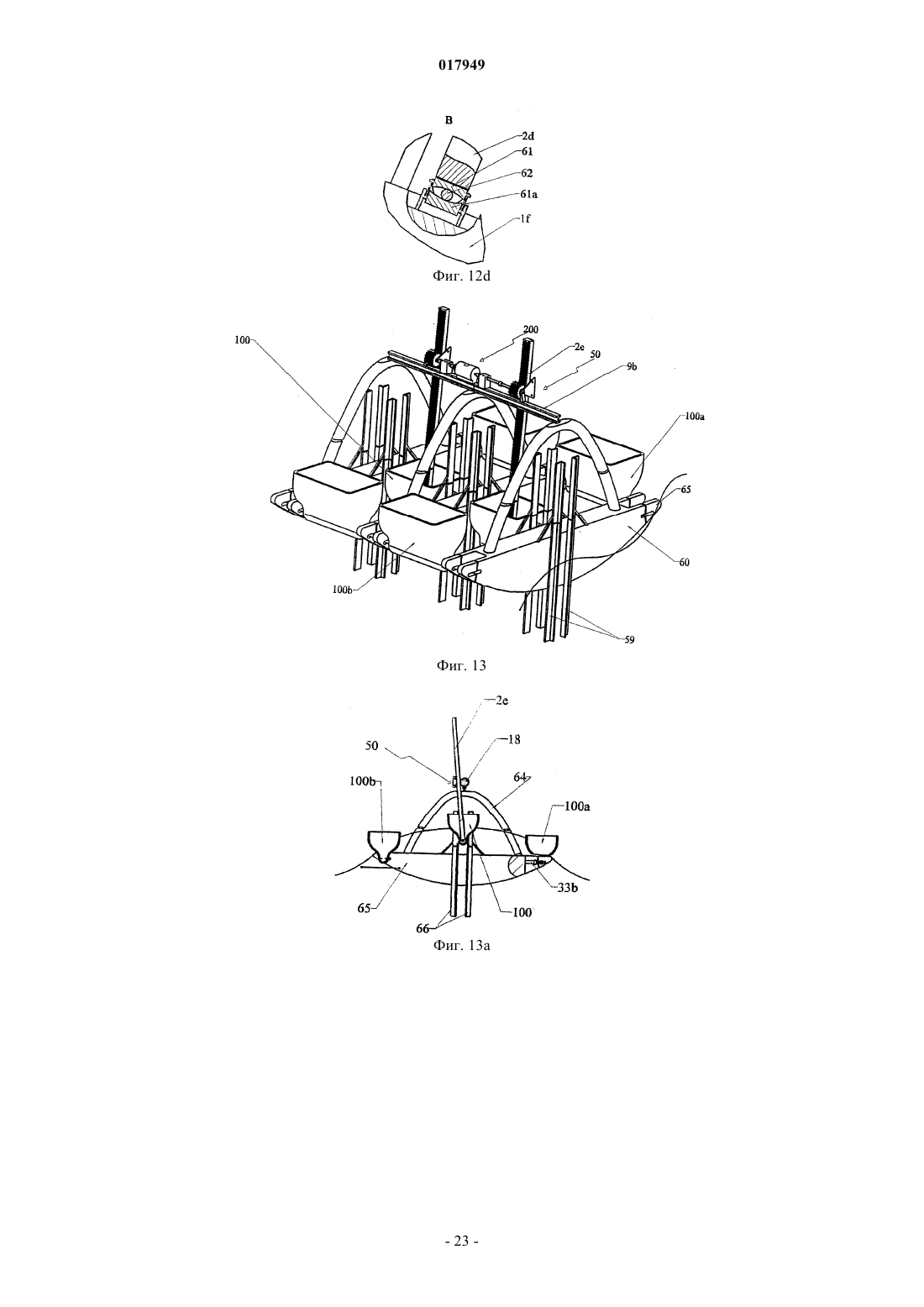
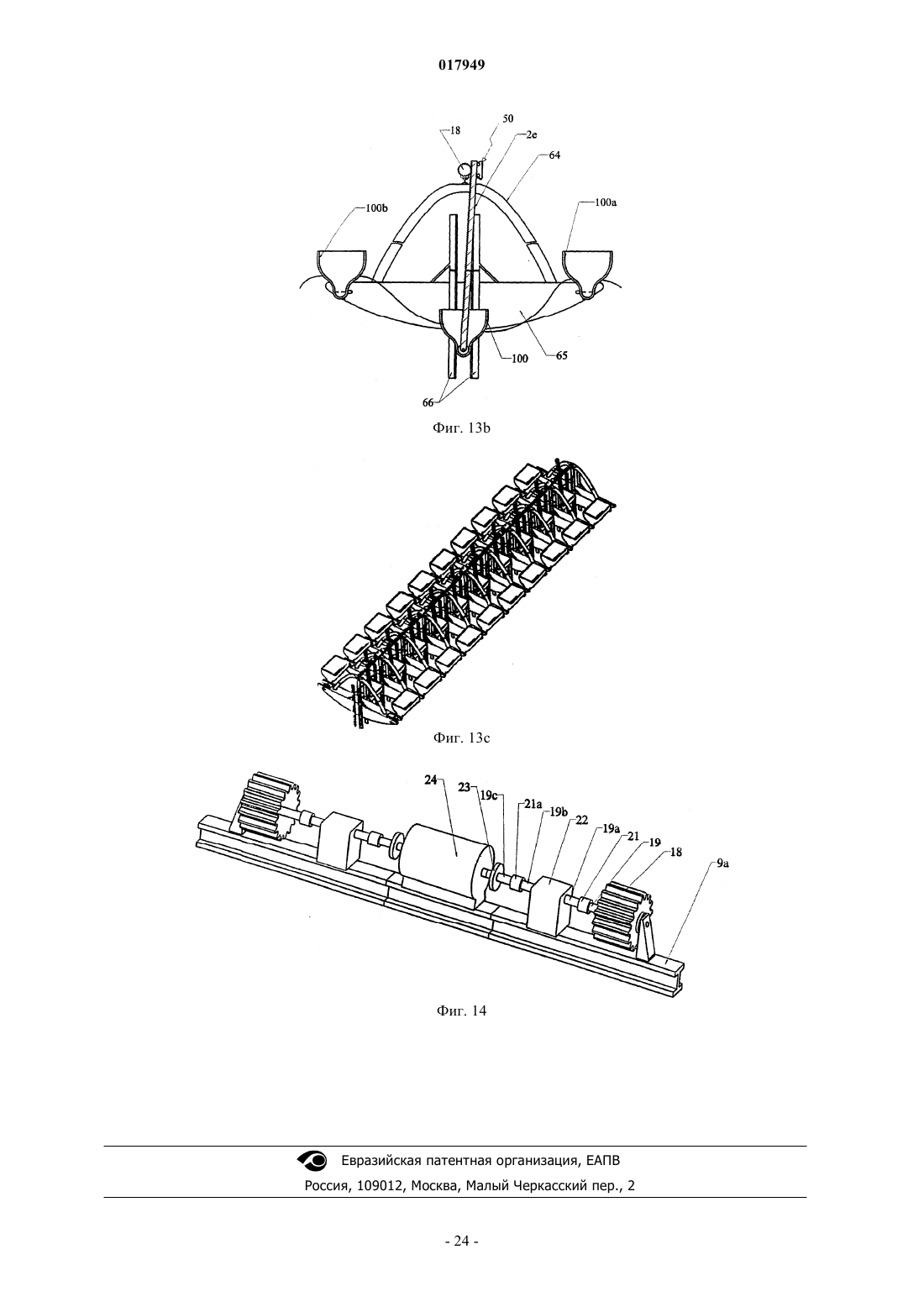
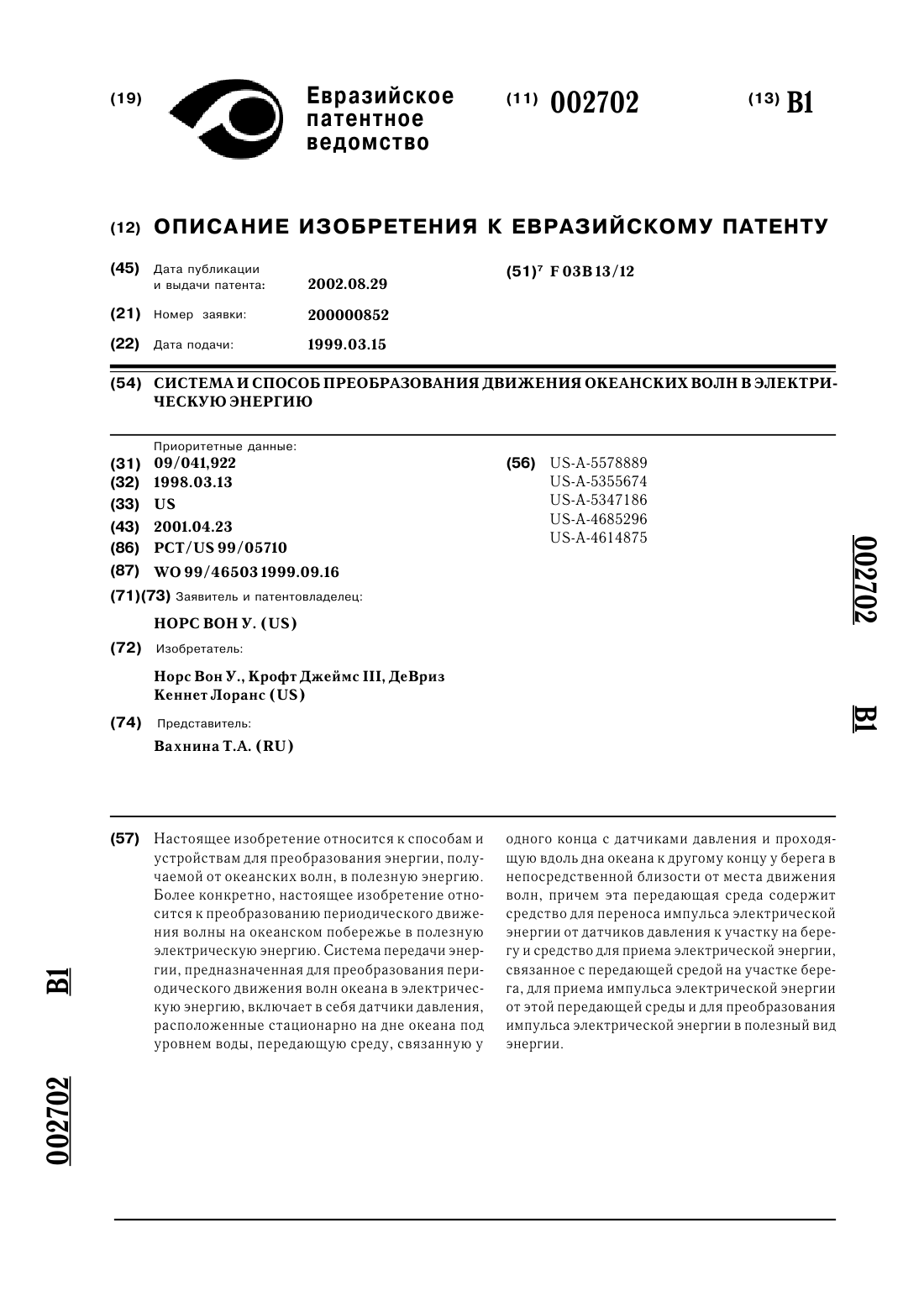
СИСТЕМА И СПОСОБ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВОЛН В ЭЛЕКТРИЧЕСКУЮ ЭНЕРГИЮ Настоящее изобретение относится к экономичному и экологичному процессу производства электрической энергии. В соответствии с изобретением электрическая энергия производится путем преобразования энергии волны. В проиллюстрированных вариантах выполнения акватические волны поднимают плавающее тело, которое с помощью системы передачи линейно перемещает магнит в индукционной катушке или преобразует вертикальное движение плавающего тела в круговое движение генератора, который производит электричество. Система для производства энергии содержит или гибкие, или негибкие передаточные валы, которые передают движение на ротационные или линейные генераторы. Настоящее изобретение включает систему для производства электричества с неподвижной опорой, закрепленной на дне моря, и систему с боковыми и центральными плавающими телами, с ротационными или линейными генераторами,присоединенными к передаточным валам, размещенными выше системы для производства электричества. Область изобретения Настоящее изобретение относится в целом к использованию энергии от волн и преобразованию возвратно-поступательного движения волн в рабочее движение генератора, который затем производит электричество. В соответствии с настоящим изобретением эта система использует плавающее рабочее тело для преобразования линейного колебания акватических волн либо в круговое, либо в возвратнопоступательное движение генератора. Настоящее изобретение отвечает на следующий вопрос: какое самое практичное решение конструкции системы для преобразования энергии волн в электрическую энергию. Описание уровня техники Современные системы для производства электрической энергии очень дорогостоящи, и многие из них используют невозобновимое ископаемое топливо и сильно загрязняют окружающую среду. Планета подвергается опасности глобального потепления и парникового эффекта. Это приводит к вопросу производства электрической энергии с использованием естественной, возобновимой энергии волн. Сегодня энергия волн не используется для производства электрической энергии, разве что кроме экспериментов. Электростанции ограничены количеством доступной руды, используемой в качестве движущего усилия для турбин, в то же самое время они являются большими экологическими загрязнителями. Атомные электростанции представляют собой большие источники энергии, но они могут быть очень опасными, если они повреждаются (Чернобыль и некоторые станции, например, в США). Испуская большое количество водяного пара в атмосферу, они увеличивают глобальное загрязнение; существует также очень серьзная проблема с ядерными отходами. В качестве альтернативы, электричество производят на электростанциях, построенных на дамбах рек и озер. Однако конструкция таких электростанций сложна и дорогостояща. Прибрежные страны не могут использовать этот источник для производства электричества. Единственное решение для этих стран - использование энергии волн. Предшествующие попытки использования энергии волн для производства электричества не преуспели из-за некоторых специфических неудобств и не были воплощены на практике. Патент США 1393472, выданный в 1921 году, был попыткой использовать энергию волн для перемещения платформы вверх и вниз очень сложным способом с большим количеством передач, которые обычно приводили к большой потери энергии. Это сказывалось на чрезвычайно низкой мощности на выходе. Из-за ограниченного свободного перемещения платформы, возможного заклинивания, столкновений и аварийности, этот патент никогда не был воплощен на практике. Двигатель в этом патенте состоял из многочисленных частей, а платформа была очень тяжела и имела существенную инерцию. Были также предприняты некоторые другие попытки, такие как патент США 5710464, выданный в 1998 году, который является интересным примером использования энергии волн для работы насосов для подачи питания электрическому генератору. В этом изобретении насосы перекачивали морскую воду через трубы к электрическому генератору, который производил электричество. Аналогично, патенты США 4232230 и 4672222 также представляли собой попытки произвести электрическую энергию при помощи возвратно-поступательного движения электромагнитов. Но затраты на производство запасных частей были высоки; обслуживание было дорогостояще и сложно, потому что индукционный генератор был расположен ниже поверхности воды, что увеличивало затраты на эксплуатацию и производство. По сравнению с предшествующими патентами последние патенты были, без сомнения, намного лучше, но не являлись законченными. По сравнению с предшествующими изобретениями это изобретение представляет собой продвинутое изобретение, поскольку максимальная водная энергия используется и преобразуется в электрическую энергию с минимальными потерями в системе передачи. Путем взаимного размещения и расположения наборов плавающих тел используется максимальная энергия акватических волн, а море "сглаживается". Магнит индукционной катушки непосредственно соединен с плавающими телами. С размещением вращательного генератора минимальные потери в системе передачи достигаются с использованием односторонних муфт. Сущность изобретения Описанное изобретение представляет собой систему для производства электрической энергии, которая обеспечивает большую эффективность в преобразовании движения акватических волн в электрическое движение генератора. Устройства и компоненты, необходимые для осуществления сборки системы, известны, дешевы и могут быть изготовлены или собраны в экономичном производстве. В отличие от ранее упомянутых патентов США 4232230 и 4672222, в которых индукционные генераторы размещены ниже поверхности воды, в настоящем изобретении индукционный генератор расположен выше поверхности воды, выше плавающего рабочего тела, например не ниже плавающего рабочего тела, как это имеет место в упомянутых выше патентах США. Настоящая система для производства энергии включает плавающее тело, передаточный вал, узлы для прикрепления системы к морскому дну, кронштейн с устройствами для производства электрической энергии. В отличие от патента США 1393472 система для производства электрической энергии раз-1 017949 мещена не на плавающем теле, а расположена на неподвижных колоннах. Благодаря этому система для преобразования возвратно-поступательного движения плавающего тела во вращательное движение намного более проста, с меньшим количеством машинных частей; с односторонними муфтами, которые передают вращательный момент только в одном направлении и не передают в противоположном направлении. Между настоящим изобретением и другими упомянутыми патентами нет никаких общих признаков. Плавающее тело плавает на воде и расположено между неподвижными частями (двумя или тремя колоннами) и при воздействии волн перемещается вверх и вниз. Передаточный вал, который может быть гибким или негибким, установлен на плавающем теле. Передаточный вал передает движение на генератор для производства электрической энергии. Электрическая энергия может быть произведена либо при помощи индукционной катушки, либо при помощи генератора. Движение магнита в индукционной катушке непосредственно связано с движением плавающего тела либо через гибкий передаточный вал, либо через негибкий передаточный вал. Индукционная катушка размещена выше поверхности воды и выше рабочего тела. При такой конструкции это представляет собой самый простой путь производства электрической энергии. Система для производства энергии производит электрическую энергию, обеспечивая возможность плавающему телу перемещаться вверх и вниз при воздействии на него волн. Так как плавающее тело непосредственно связано с генератором передаточным валом, это приводит к тому, что возвратнопоступательное движение магнита в индукционной катушке производит электрическую энергию. В качестве альтернативы, возвратно-поступательное движение передаточного вала может быть преобразовано в круговое движение ротационным генератором. С помощью системы генератора движение плавающего тела преобразуется в круговое движение очень простым способом с минимальными потерями в системе передачи и минимальным числом машинных частей генератора для того, чтобы произвести электрическую энергию. В одном иллюстративном варианте выполнения производство электрической энергии из движения волн может быть осуществлено и без каких-либо частей, прикрепленных ко дну массы воды. В этом расположении центральное плавающее тело окружено внешними плавающими телами на таком расстоянии,что, когда центральное плавающее тело находится во впадине волны, внешние плавающие тела находятся на вершине волны, и наоборот. Центральное плавающее тело соединено с устройством для производства электрической энергии, как это было описано ранее (генератор или индукционная катушка с опорным механизмом). Внешние плавающие тела могут отходить от центрального плавающего тела или сближаться с ним в зависимости от длины волны. Расстояние между внешними плавающими телами соответствует длине волн, таким образом обеспечивается максимальное использование системы. Краткое описание чертежей Настоящее изобретение и его преимущества станут более очевидными после рассмотрения последующего детального описания вместе с сопровождающими чертежами. Фиг. 1 показывает систему для производства электрической энергии с легким плавающим телом,выполненным в соответствии с настоящим изобретением. Фиг. 2 представляет собой схематический вид системы для производства энергии, изображенной на фиг. 1, перемещающейся под действием волн. Фиг. 3 представляет собой вариант выполнения системы, изображенной на фиг. 1, показывая ее переднюю сторону в поперечном разрезе. Фиг. 3 а является видом в аксонометрии системы для производства энергии, изображенной на фиг. 3. Фиг. 3b показывает аксонометрический разрез области системы для производства энергии и один вариант расположения плавающих тел в направлении волн. Фиг. 3 с представляет собой вид сверху одного из возможных расположений плавающих тел, размещенных на поверхности воды. Фиг. 4 представляет собой вид в аксонометрии с частичным поперечным разрезом другого варианта выполнения системы для производства энергии, изображенной на фиг. 1, с генератором для производства электрической энергии. Фиг. 5 представляет собой увеличенный вид в аксонометрии системы для производства энергии,изображенной на фиг. 4, т.е. основных устройств для преобразования возвратно-поступательного движения в круговое движение и его передачу на генератор. Фиг. 6 представляет собой вид в аксонометрии с частичным поперечным разрезом другого варианта выполнения системы для производства энергии, изображенной на фиг. 1. Фиг. 6 а представляет собой вид в аксонометрии с частичным поперечным разрезом другого варианта выполнения системы для производства энергии, изображенной на фиг. 6. Фиг. 7 представляет собой вид в аксонометрии системы для производства энергии, изображенной на фиг. 4, с большим плавающим телом. Фиг. 7 а представляет собой вид сбоку системы для производства энергии, изображенной на фиг. 7. Фиг. 7b показывает вид в аксонометрии системы для производства энергии, изображенной на фиг. 7, со шкивами с гибкими передаточными валами, размещенными выше поверхности воды. Фиг. 7 с представляет собой увеличенный вид в аксонометрии системы для производства электрической энергии, закрепленной на системах для производства энергии, изображенных на фиг. 7, 7 а и 7b. Фиг. 8 а показывает вид в аксонометрии способа размещения предыдущей системы для производства энергии в направлении движения волн. Фиг. 8b представляет собой вид сверху системы для производства энергии, изображенной на фиг. 8 а. Фиг. 9 показывает в аксонометрии комбинацию большого плавающего тела и индукционных катушек, используемых в качестве преобразователей энергии. Фиг. 10 а представляет собой вид спереди в поперечном разрезе, изображающий форму плавающего тела с подобранными устройствами для более коротких волн. Фиг. 10b является видом сверху системы для производства электрической энергии, изображенной на фиг. 10 а. Фиг. 11 представляет собой вид в аксонометрии, изображающий производство электрической энергии посредством большого плавающего тела с выступами, присоединенными к опорам. Фиг. 11 а представляет собой вид в аксонометрии, изображающий часть А, показанную на фиг. 11. Фиг. 11b представляет собой продольный разрез сбоку плавающего тела с системой для производства электрической энергии. Фиг. 11 с представляет собой вид сбоку плавающего тела с кронштейном и негибким передаточным валом с системой для производства электрической энергии. Фиг. 11d представляет собой вид сверху плавающего тела. Фиг. 11 е изображает детали, показанные на фиг. 11d. Фиг. 11f представляет собой вид в аксонометрии устройства, изображенного на фиг. 11g. Фиг. 11g представляет собой вид сверху устройства, которое преобразует двухстороннее рабочее движение во вращение шпинделя в том же самом направлении посредством внешней передачи. Фиг. 12 представляет собой вид в аксонометрии части плавающего тела с неподвижным передаточным валом, размещенным на плавающем теле, и систему для производства электрической энергии. Фиг. 12 а представляет собой разрез части фиг. 12. Фиг. 12b представляет собой разрез плавающего тела и гибкого соединения посредством передаточного вала. Фиг. 12 с представляет собой увеличенный разрез части А, изображенной на фиг. 12 а. Фиг. 12d представляет собой увеличенный разрез части В, изображенной на фиг. 12b. Фиг. 13 представляет собой вид в аксонометрии части системы для производства электрической энергии, без негибких опор на морском дне. Фиг. 13 а представляет собой вид спереди в разрезе верхнего положения плавающих тел под действием волн. Фиг. 13b показывает вид спереди в разрезе нижнего положения плавающих тел под действием волн. Фиг. 14 представляет собой вид в аксонометрии опорного кронштейна 8 с системой для производства электрической энергии. Подробное описание изобретения Фиг. 1 представляет собой вид в аксонометрии системы для производства энергии с легким плавающим телом 1 а, выполненной в соответствии с изобретением. В иллюстративных вариантах выполнения система для производства энергии содержит две колонны 7, закрепленные на дне моря одним из своих концов, и с механизмом для перемещения кронштейна 9 на другом, свободном, конце. При помощи направляющих на основной колонне 13 колонны присоединены к вертикальному кронштейну 9, который параллелен поверхности воды. Указанный механизм на кронштейне 9 используется для обеспечения компенсации в изменении высоты прилива-отлива. Механизм содержит электродвигатель 10, редуктор 11, винтовой домкрат 12 и зубчатую рейку 8, которая присоединена к колонне 7. Этот механизм, измеряемый и управляемый компьютером, поднимает и опускает кронштейн 9. Это важно для тех мест, где разница в высоте прилива-отлива является существенной. Поэтому передаточный вал 2 не должен быть чрезвычайно длинным. С помощью этой системы колебание магнита 4 вокруг центрального положения индукционной катушки 14 может быть в общих чертах соблюдено. В местах, в которых различие в высоте минимально, кронштейн 9 может быть закреплен относительно колонн 7. Точное совмещение магнита обеспечивают с помощью направляющего винта 5, который отклоняется при помощи двигателя 15 направляющего винта. Магнит 4 начинает перемещаться относительно стержня 2, когда это приводится в движение направляющим винтом 5. Движение магнита 4 должно контролироваться и обеспечиваться компьютером. Чтобы добиться постоянного положения передаточного вала 2, добавлен подшипник 16. Передаточный вал проходит через подшипник, который воспринимает боковые силы и обеспечивает надлежащее продвижение магнита в индукционной катушке. В этом изобретении представлено новаторское решение, которое обеспечивает минимальные боковые силы на передаточном валу 2. Передаточный вал 2 присоединен к плавающему телу ниже центральной точки смещения при помощи шарнира. Плавающее тело 1 а в этом варианте выполнения является круглым в поперечном сече-3 017949 нии, занимает свободное положение относительно передаточного вала 2, при этом силы плавучести слева и справа от передаточного вала равны, таким образом, передаточный вал не испытывает никакой боковой нагрузки. Верхняя часть плавающего тела свободна, при этом контакт между плавающим телом и передаточным валом 2 следует избегать. Чтобы предотвратить поступление воды в плавающее тело и обеспечить свободное смещение плавающего тела относительно передаточного вала 2, используется водонепроницаемая гибкая мембрана 6. Способ прикрепления мембраны 6 к плавающему телу с одной ее стороны и к передаточному валу 2 с другой ее стороны известен. Плавающее тело должно быть настолько легким, насколько это возможно, таким образом, его изготовляют из легких материалов, таких как комбинация стекловолокна и пластмассы или изготовляют из надувных баллонов. Рабочий режим: плавающее тело поднимается, когда волны приближаются, и вертикальное движение плавающего тела передается магниту 4 в индукционной катушке 14 посредством передаточного вала 2. Электрическая энергия производится в индукционной катушке движением магнита. В зависимости от размера плавающего тела линейный генератор (магнит и индукционная катушка) и потребитель энергии выполнены с соответствующими размерами. Нужно учесть, что рабочий ход осуществляется тогда, когда плавающее тело смещается вертикально вверх, а когда плавающее тело смещается вертикально вниз,линейный генератор должен работать без нагрузки для обеспечения перемещения плавающего тела вниз,чтобы тот отслеживал движение волн. Фиг. 2 представляет собой схематический вид, изображающий вертикальное перемещение плавающего тела под действием волн. Фиг. 3 в отличие от фиг. 1 имеет более сильный передаточный вал 2 а, который может быть решетчатым, трубчатым или подобного типа. Этот передаточный вал используется, чтобы воспринимать боковые усилия большей величины, вызванные сильными ветрами и волнами. Передаточный вал 2 а перемещается через подшипник 16 а, который прикреплен к кронштейну 9, который может перемещаться при помощи специально управляемого механизма. Кронштейн 9 перемещается только во время отлива и прилива. Таким образом, передаточный вал 2 а не должен быть слишком длинным. Индукционная катушка прикреплена к кронштейну с помощью опоры 15 а. Кронштейн 9 может быть смещен механизмом,прикрепленным к нему или к колонне 7 а. Колонна 7 а прикреплена к морскому дну одним из ее концов. Фиг. 3 а аналогична фиг. 3, за исключением того, что части изображены в аксонометрии. Фиг. 3b показывает другое расположение плавающих тел в направлении действия волны. Число плавающих тел, размещенных в направлении действия волн, может быть выбрано свободно, в зависимости от потребностей, а число рядов плавающих тел зависит от размера волн. Предполагается, что плавающие тела в заднем ряду будут подвержены действию волны с меньшей амплитудой, потому что плавающие тела в передних рядах примут на себя большую часть энергии. Таким образом, помимо производства электрической энергии могут быть защищены, например, некоторые части прибрежной полосы или гаваней. Фиг. 3 с представляет собой вид в поперечном разрезе фиг. 3b по линии А-А. Фиг. 4 отличается от фиг. 1 следующими деталями: плавающее тело 1 а присоединено к передаточному валу 2b с использованием шарнира. Передаточный вал представляет собой зубчатую рейку, которая передает вертикальное движение плавающего тела механизму 20, который преобразует возвратнопоступательное движение в круговое движение и передает вращательный момент на генератор для производства электрической энергии. Этот вариант выполнения показывает схематический вид подшипника 16b, который используется для надлежащего продвижения передаточного вала 2b и поддержания его присоединенным к паре его механизмов 20. Подшипник 16b может быть подшипником скольжения, с несколькими парами подшипников качения, например, с перемещением шариков по замкнутой траектории. Он может быть размещен как ниже, так и выше кронштейна 9. Лучшим положением является положение спереди и сзади передачи 18. Зубчатая рейка 2b передает возвратно-поступательное движение плавающего тела 1 а механизму 20. В этом варианте выполнения изображена зубчатая рейка с вертикальными зубцами, хотя, чтобы поддерживать систему устойчивой, предусмотрены также стреловидные или наклонные зубцы. Рабочий режим: плавающее тело 1 а перемещается вертикально под действием волн и перемещает передаточный вал 2b, который находится в непрерывном контакте с механизмом 20, который преобразует вертикальное перемещение плавающего тела 1 а в круговое движение генератора, который производит электрическую энергию. Подробное описание механизма 20 дано со ссылкой на следующий чертеж. На фиг. 5 изображен механизм для преобразования возвратно-поступательного движения в круговое движение и передачу вращательного момента на генератор. Преимущество этого решения по сравнению с ранее описанными решениями состоит в том, что имеется лишь небольшое количество машинных частей, в результате чего потери минимальны. Впервые для высвобождения системы передачи при обратном ходе передаточного вала 2b используется односторонняя муфта. Передача 18 прикреплена к кронштейну 9 а при помощи одной или двух опор 17. В отличие от ранее описанного варианта выполнения электрическая энергия здесь производится в ротационном генераторе 24. Поступающие волны вызывают подъем плавающего тела 1 а и, через использование шарниров 3, смещают рейку 2b вертикально вверх. Вертикальное движение рейки 2b преобразу-4 017949 ется в круговое движение посредством передачи 18. Вращательное движение передачи 18 передается к односторонней муфте 21 через вал 19. Односторонняя муфта 21 передает вращательную силу в одном направлении. Вращательное движение от односторонней муфты 21 передается мультипликатору 22 при помощи вала 19, где число оборотов вала 19 на входе увеличивается до требуемого числа оборотов спроектированного генератора 24. Мультипликатор 22 может быть очень простым и может содержать одну,две или большее число пар передач. Используя мультипликатор 22, может быть осуществлено установленное число оборотов с минимальной потерей. Вращательное движение передается от мультипликатора 22 к односторонней муфте 21 а при помощи вала 19b, а далее валом 19 с к маховику 23. Маховик 23 предназначен для поддержания инерции, чтобы поддерживать вращение генератора 24. Маховик 23 может быть размещен как с левой, так и с правой стороны от генератора 24. Вращательный момент после маховика 23 передается генератору 24 при помощи вала, при этом производится электрическая энергия. Это все еще является самым простым и самым эффективным способом производства электрической энергии,с небольшим количеством машинных частей и минимальных потерь в процессе передачи вращательного момента на генератор. Когда плавающее тело достигает верхней мертвой точки и начинает перемещаться вниз, рейка 2b и передача 18 изменяют свое направление. В этот момент муфта 21 отсоединяется, и вал 19 вращается во встречном направлении, при этом вал 19, из-за инерции, продолжает перемещаться в предыдущем направлении в течение короткого промежутка времени. Чтобы избежать негативного воздействия сопротивления мультипликатора 22 на вращение генератора 24 под влиянием маховика 23, используется вторая односторонняя муфта 21 а. Вторая односторонняя муфта 21 а обеспечивает возможность дальнейшего перемещения вала 19 с генератора под влиянием инерции маховика. Когда плавающее тело 1 а достигает нижней мертвой точки и начинает перемещаться вертикально вверх, ранее описанный процесс повторяется, при этом производится электрическая энергия. Чтобы уменьшить потери в мультипликаторе, должен быть сконструирован генератор, который работает с минимальным количеством оборотов. С небольшим количеством оборотов маховик либо теряет свою функцию, либо он должен быть чрезвычайно тяжелым; в этом случае механизм 20 может быть выполнен таким образом, что вал 19b непосредственно присоединен к валу генератора 24. Это означает, что механизм 20 не содержит маховик 23. В этом случае механизм 20 содержит передачу 18, вал 19, одностороннюю муфту 21, вал 19 а, мультипликатор 22, который может представлять собой одну или две пары передач, и вал 19b, который присоединен к генератору 24. Чтобы избежать использования чрезвычайно длинной рейки и обеспечить компенсацию в разнице прилив-отлив, имеется три возможных решения: 1) использовать телескопическую рейку, т.е. рейку переменной длины; длина может быть изменена, например, гидравлически, пневматически, электромеханически; 2) выполнять вертикальное смещение кронштейна 9 а вдоль колонн 7 а,которое может быть реализовано несколькими знакомыми и принятыми в уровне техники способами(например, гидравлически, пневматически, электромеханически или любой другой комбинацией); 3) изменять высоту колонн 7 а, что может быть реализовано несколькими знакомыми и принятыми в уровне техники способами (например, гидравлически, пневматически, электромеханически или любой другой комбинацией). На фиг. 6 изображена система для преобразования электрической энергии, которая содержит плавающее тело 1d, которое должно быть герметично изолировано на своей верхней стороне, с передаточным валом 25, прикрепленным к его нижней части. Передаточный вал охватывает шкив 27, а затем перемещается вверх к кронштейну 9 а с индукционной катушкой 14 а. Индукционная катушка с магнитом 4 присоединена к гибкому передаточному валу, который может быть выполнен в форме, например, кабеля,цепи или прочной веревки. Магнит 4 прикреплен непосредственно либо к передаточному валу 25, либо к стержню, соединенному с передаточным валом 25. После индукционной катушки передаточный вал 25 перемещается по меньшему шкиву 28 а. В этой конструкции вес 26 передаточного вала 25 используется для поддержания натяжения в передаточном вале, в то время как шкив 27 с возможностью поворота присоединен к колонне 7b. Максимальная энергия производится, когда магнит (постоянный магнит) осуществляет колебания вокруг центра индукционной катушки 14 а. Чтобы добиться такого колебания вокруг центра индукционной катушки во время прилива и отлива, магнит 4 перемещается вертикально вдоль передаточного вала 25. Индукционная катушка 14 а вместе с кронштейном 9b может также перемещаться. В этом случае, если магнит прикреплен к передаточному валу 25 во время прилива; кронштейн 9 перемещается вниз во время отлива, и наоборот. Фиг. 6 А показывает два плавающих тела 1d, которые по передаточному валу 25 передают движение к магниту 4 в индукционной катушке 14 а. Этот чертеж показывает рационализированное решение размещения частей системы в пространстве. В отличие от предыдущего решения в этом варианте выполнения гибкое рабочее тело перемещается по двум шкивам 27, 27b. Другой вариант выполнения системы для производства энергии изображен, например, на фиг. 7. В этом варианте выполнения электрическая энергия производится плавающим телом 1b, которое намного больше, чем те, которые были описаны ранее. Плавающее тело 1b передает свое вертикальное движение по передаточному валу 25 на шкив 27d и на механизм 200, который преобразует возвратнопоступательное движение в круговое движение при помощи ранее описанной системы валов и односторонних муфт на ротационный генератор, который производит электрическую энергию. Изображенные плавающие тела 1b выполнены ориентированными в воде так, что приближающиеся волны взаимодействуют с их боковым поверхностями вдоль того измерения, которое длиннее. Ориентация плавающего тела 1b, таким образом, обеспечивает естественную стабилизацию и баланс. Волны поворачивают плавающее тело и взаимодействуют с его более длинной боковой поверхностью и, таким образом, обеспечивают максимальное раскачивание. По этой причине длина плавающего тела должна быть в три-четыре раза больше, чем его ширина и, предпочтительно, в десять и большее число раз больше, чем его ширина. Если плавающее тело 1b шире, чем волны, с которыми оно сталкивается, то эффективность системы снижается. Плавающее тело 1b, размещенное таким образом, нуждается в том, чтобы минимальные силы поддерживали его положение, причем нет никакой естественной силы, чтобы поворачивать плавающее тело 1b, а максимальная амплитуда обеспечивает наибольшее количество энергии. Чтобы увеличить амплитуду плавающего тела 1b и уменьшить потери, могут использоваться кронштейны 30, 30 а, как показано, например, на фиг. 7. Это является желательным из-за необходимости увеличивать амплитуду движения и поддерживать расстояние плавающего тела 1b от неподвижных колонн. Однако плавающее тело 1 а может быть выполнено и без кронштейнов, причем в этом случае кабели установлены непосредственно на плавающем теле 1b. В этой конструкции получают больше силы в передаточном вале 25 (кабель) и более низкую амплитуду. Когда плавающее тело перемещается вертикально вверх, механизм 200 перемещается через передаточный вал 25, который прикреплен к кронштейну 30 а. Когда плавающее тело перемещается вертикально вниз, механизм 200 перемещается через передаточный вал 25, который присоединен к кронштейну 30. Следует отметить, что сила в передаточном валу 25 намного сильнее, когда плавающее тело смещается вверх, и пропорциональна массе вытесненной воды,уменьшенной на массу плавающего тела. Когда плавающее тело смещается вниз и перемещается через передаточный вал 25, прикрепленный к кронштейну 30, сила пропорциональна массе плавающего тела,уменьшенной на массу вытесненной воды. Вес 26 используется для поддержания натяжения в передаточном валу после действия силы натяжения. Шкив 27d системы, показанной на фиг. 7, может быть помещен либо ниже, либо выше поверхности воды. Если шкив 27d используется выше поверхности воды, то кронштейн 30d подобен кронштейну, изображенному на фиг. 7 В. Непосредственные столкновения между кронштейном 30d и шкивом (27d) следует избегать. Плавающее тело 1b должно быть настолько длинным, насколько это возможно, тогда как ширина зависит от длины самых частых волн в том месте, где расположено плавающее тело. Плавающее тело 1b должно быть достаточно высоким, чтобы предотвратить полное погружение плавающего тела в волны во время его поднятия, чтобы добиться максимального использования. Оно должно быть закрыто сверху, по причине дождей. Колонны прикреплены (установлены) на дне океана (моря). Колонны рамного типа обеспечивают возможность размещения системы для производства электрической энергии вместе со всем необходимым оборудованием выше плавающего тела. Колонны также обеспечивают возможность размещения шкива 27d, как показано, например, на фиг. 7, который может использоваться для поддержания плавающего тела в рабочем режиме и на безопасном расстоянии от колонн. Следует отметить; сила в основании шкива 27d чрезвычайно велика. Это имеет место, когда плавающее тело начинает перемещаться вверх, тогда в основании шкива 27d, как показано, например, на фиг. 7, создается сила, в два раза превышающая силу, созданную плавучестью платформы в месте действия системы для производства электрической энергии, таким образом, шарнир 28 и кронштейны 30b, 30 с должны иметь хорошо соответствующие друг другу размеры. Из-за этого и из-за стоимости изготовления, и стоимости устройства для производства электрической энергии, необходимо искать и находить оптимальную длину плавающего тела и число узлов для производства электрической энергии, размещенных на платформе посредством этой системы с гибким рабочим телом. Один способ размещения предыдущей системы в направлении волн показан на фиг. 8 а. Фиг. 8b представляет собой вид сверху системы, изображенной на фиг. 8. Фиг. 9 представляет собой другой вариант выполнения системы для производства энергии, изображенной на фиг. 7. Различие состоит в устройстве для производства электрической энергии, которое имеет индукционные катушки вместо генератора. Другой вариант выполнения системы для производства энергии, изображенной на фиг. 4, показан на фиг. 10. Форма плавающего тела 1 с немного отличается, таким образом, оно может использоваться для более коротких волн. Чтобы увеличить боковую амплитуду качания и, в то же самое время, эффективную работу, в плавающее тело 1 с помещают дополнительную массу 35. Масса 65 выполнена с возможностью смещения вдоль вертикальной оси плавающего тела 1 с, в зависимости от размера волн. Таким образом, можно сместить центр массы и, вместе с этим, изменить боковую амплитуду смещения,которая обеспечивает большую выходную мощность электрической энергии от генератора. Смещение дополнительной массы вертикально может быть выполнено, например, гидравлически, пневматически,электромеханически, с помощью комбинированной системы. Чтобы предотвратить опрокидывание плавающего тела 1 с, систему для управления и ограничения движения, составленную из массы 34 противовеса, присоединяют к плавающему телу 2 с и гидравлическому цилиндру 33 а. Опорный кронштейн 31h на плавающем теле 1 с отжимает передаточный вал 2 с, который присоединен к шестерне 18 преобразова-6 017949 тельного механизма 20. Фиг. 11, 11 а, 11b, 11c, 11d, 11e, 11f и 11g показывают другой вариант выполнения системы для производства энергии, изображенной на фиг. 4. Фиг. 11 показывает большое плавающее тело 1 е, которое имеет ряд боковых систем для производства энергии на обеих более длинных сторонах плавающего тела. Фиг. 11d представляет собой вид сверху большого плавающего тела 2 е, a фиг. 11b представляет собой вид сбоку большого плавающего тела 1 е. Фиг. 11 а и 11 с показывают соединение плавающего тела 2 е и системы для производства энергии при помощи передаточного вала 2 с. Для увеличения амплитуды смещения плавающего тела 2 е прикреплен кронштейн 30g. Кронштейн 30g выполнен с возможностью размещения на профилированных цилиндрах 32 а, 32b как это показано на фиг. 11 с фиг. 11 а. Образующие линии профилированных цилиндров 32 а, 32b имеют форму дуги, как показано на фиг. 11 а. Таким образом, обеспечивается самовыравнивание плавающего тела. Профилированные цилиндры 32 а, 32b могут иметь переменные диаметры, но важно в этом случае не пересечь линию изгиба кронштейна 30g. Профилированные цилиндры 32 а, 32b без возможности удаления опираются на кронштейн 30g, так чтобы нагрузку от столкновения можно было избежать. Это может быть обеспечено, например, с помощью системы пружин в передаточном валу 2 с. Кронштейн 30g посредством профилированных цилиндров 32 а, 32b передает возвратно-поступательное движение передаточному валу 2 с, а подшипники, прикрепленные к колонне 71 а, обеспечивают надлежащую установку передаточного вала 2 с на шестерне 18, которая преобразует возвратно-поступательное движение передаточного вала 2 с в круговое движение преобразовательного механизма. Плавающее тело 1 е содержит по меньшей мере четыре боковых опорных кронштейна 36 а, 36b, которые используются для предотвращения касания кронштейном 30g передаточного вала 2 с снаружи профилированных цилиндров 32 а, 32b, и для предотвращения пересечения кронштейном линии изгиба. Опорные кронштейны 36 а, 36b должны быть изготовлены таким образом, чтобы поддерживать плавающее тело 1 е в рабочем положении во время условий умеренного волнения. Фиг. 11 с показывает взаимное расположение цилиндров 32 а, 32b относительно кронштейна 30g. Фиг. 11 е показывает, что продвижение передаточного вала 2 с выполняется между частями 71 а и 71b на одной стороне опорной колонны 70, которая установлена на дне океана (моря). Фиг. 11g представляет собой вид в аксонометрии системы для приведения в действие генератора 24 для производства электрической энергии, которое обеспечивает возможность преобразования вертикального движения плавающего тела 1 е в обоих направлениях (вверх и вниз) в полезный вращательный момент для приведения в действие генератора 24. Фиг. 11b изображает подробное расположение устройства. Когда волна приближается и плавающее тело 1 е поднимается, передаточный вал 2 с смещается вверх, вращает передачу 18 в одном направлении. Полученный вращательный момент передается к первой односторонней муфте 21b, далее к мультипликатору 22, и далее на вал 19b и вторую одностороннюю муфту 21 а и на генератор 24. Односторонняя муфта 21b высвобождается и не передает вращательный момент с этим движением передаточного вала 2 с. Когда передаточный вал 2 с начинает перемещаться вниз, передача 18 начинает вращаться во встречном направлении. В этот момент односторонняя муфта 21b отпускается и принимает вращательный момент и передает его на мультипликатор 22 и далее на генератор 24. Чтобы обеспечить постоянное вращение в одном и том же направлении на входе мультипликатора 22, используется дополнительный набор передач 18 а, 18b, 18 с. Полый вал 18 е в этом случае содержит внешнюю передачу и одностороннюю муфту 21b. Полый вал 18 е установлен на валу. Фиг. 12, 12 а, 12b, 12 с и 12d представляют собой другой вариант выполнения системы для производства энергии, изображенной на фиг. 4. Фиг. 12 показывает часть плавающего тела 1f с присоединенным к нему передаточным валом 2d. В отличие от предшествующих показанных вариантов, движение плавающего рабочего тела передается передаточному валу 2d по дуговым призмам и цилиндру 60. Электрическая энергия производится движением рейки 2d. Эта система уже была описана. Непосредственное соединение рейки 2d и плавающего тела 1f показано на фиг. 12 а. Опора 51 вместе с цилиндрами, которые имеют форму скобы, обеспечивает расположение передаточного вала 2d на передаче 18. В этом случае опора 51, которая вращается вокруг той же самой оси, что и передача 18, содержит два цилиндра 52, которые присоединены к передаточному валу 2d. Чтобы предотвратить боковое перемещение передаточного вала 2d, передаточный вал 2d должен быть вставлен в подшипник 16 с, который прикреплен к колонне 700. Подшипник 16 с принимает на себя боковые силы и обеспечивает возможность перемещения передаточного вала 2d по направлению к колонне 700 и от нее. Самовыравнивание достигается при помощи дуговых призм 61, 61 а, как более подробно показано в увеличенном масштабе областей А и В на фиг. 12 с и 12d. Фиг. 12 а представляет собой вид гидравлического цилиндра 703 в поперечном сечении. Высота колонны 700 может изменяться, чтобы скомпенсировать изменения прилив-отлив при помощи гидравлического цилиндра. В этом случае передаточный вал 2d не должен быть слишком длинным. Система для производства энергии была описана ранее. Фиг. 13 показывает новый подход к использованию энергии волны. В этой версии производство электрической энергии от движения волны может быть достигнуто без каких-либо колонн, установленных на морском дне. Один узел этой системы содержит два расположенных сбоку плавающих тела 100 а,100b и центральное плавающее тело 100. Все плавающие тела должны быть герметично изолированы. Плавающее тело 100 должно также быть герметично изолировано, но при этом должна быть обеспечена возможность свободного движения передаточного вала 2 е относительно поверхности плавающего тела 100; это может быть осуществлено с помощью гибкой мембраны. У основания плавающего тела 100 находится опора передаточного вала 2 а. Ось двух боковых цилиндрических опор проходит через ось опоры плавающего тела 100, который удерживает центральное плавающее тело 100 в центре системы. Передаточный вал 2 е передает движение к верхней системе для производства электрической энергии так, как это было уже описано. Расположенные сбоку плавающие тела 100 а, 100b также, в их самой нижней точке ниже точки центра масс, присоединены к нижней конструкции системы, например, соединительной опоре, посредством полого выступа, таким образом, что они могут скручиваться относительно нижней конструкции. Расположенные сбоку плавающие тела 100 а, 100b могут состоять либо из отдельных узлов, как показано на фиг. 13, либо из одного непрерывного узла. Плавающие тела 100 а, 100b присоединены к соединительной опоре 65 сверху нижней конструкции посредством полого вала. Так как длина волны может изменяться, и поскольку желательное расстояние между боковыми плавающими телами должно быть равным длине волны, то зазор между плавающими телами 100 а, 100b может изменяться при помощи устройства для раздвижения и сближения расположенных сбоку тел, которое предусмотрено в этом варианте выполнения. Это может быть выполнено, например, гидравлически, пневматически, электромеханически или с помощью комбинированной системы. В середине соединительной опоры 65 должны быть размещены две направляющие 66. Между направляющими 65 в этом случае перемещается полый выступ центрального плавающего тела. Люфт в этой точке должен быть немного шире, чтобы сделать заклинивание невозможным, хотя совмещение между нижними конструкциями выполняется автоматически посредством контакта между зубчатой рейкой и передачей. Плавающие тела 100 а, 100b должны быть выполнены настолько легкими, насколько это возможно, при этом соединительная опора 65 должна иметь такое низкое сопротивление вертикальному движению через воду, насколько это возможно. Соединительная опора 65 должна проходить в арочную опору 64, как показано на фиг. 13, или в аналогичную конструкцию, например, решетчатого типа, к которой верхняя система для производства электрической энергии будет в этом случае присоединена, при этом указанная верхняя система может содержать вращающийся генератор или индукционную катушку, как это было описано ранее. Система в этой конструкции предпочтительно имеет длину больше, чем ширину, как это было описано ранее, таким образом, система может занимать наилучшее положение относительно волн и предотвращать скручивание системы волнами. Система установлена на морском дне при помощи анкера, массивного тела. При такой конструкции система для электрической энергии не повреждает морское дно. В будущем, когда будет изобретена беспроводная передача энергии, узлы, как этот, могут быть размещены в различных местах недалеко от берега, где волны являются высокими. Эффективность этой системы должна быть выше изза движения центрального плавающего тела и полезного движения верхней системы. На фиг. 13 изображена часть системы, которая может состоять из такого большого числа отдельных узлов, сколько потребуется. Генератор преобразовательного механизма 20 может быть присоединен к одному или большему количеству плавающих тел 100 через передаточный вал 2 е. Фиг. 13 а показывает центральное плавающее тело 100 в его верхнем положении. Фиг. 13b показывает центральное плавающее тело 100 в его нижнем положении. Фиг. 13 с показывает возможное расположение системы для производства энергии в пространстве,тогда как фиг. 13b показывает вид сверху одной конструкции, как эта. Фиг. 14 показывает систему для производства электрической энергии, размещенной на этом варианте системы для производства электрической энергии из движения волн, показанной на фиг. 1. Следует упомянуть, что высококачественные односторонние муфты 21, 21 а, которые мгновенно принимают вращательный момент, доступны на рынке. В случае, когда из-за низкой угловой скорости шкива 31 и передачи 18 односторонняя муфта 21, 21 а не принимает вращательный момент мгновенно, за шкивом 31 или передачей 18 могут следовать мультипликатор или система пружины, чтобы обойти этот недостаток односторонней муфты. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система преобразования энергии морских волн в электрическую энергию, содержащая опорную конструкцию для установки на дне моря; плавающее тело (1 а, 1b, 1c, 1d, 1 е, 100, 100 а, 100b), выполненное с возможностью удержания на поверхности воды; передаточный элемент (2, 2 а, 2b, 2 с, 2d, 2 е), первый конец которого присоединен к плавающему телу, а второй конец находится в сообщении с устройством преобразования движения, содержащим электрический генератор, создающим электрический ток, когда передаточный элемент перемещается вверх и/или вниз под действием волнового движения массы воды, причем передаточный элемент представляет собой негибкий передаточный вал или стержень (2, 2 а, 2b, 2 с, 2d, 2 е), присоединенный к плавающему телу шарнирным соединением (3), при этом первый конец передаточного элемента присоединен к плавающему телу в точке, соответствующей центру масс плавающего тела, или ниже этой точки, при этом передаточный элемент удерживается опорной конструкцией с возможностью прямолинейного перемещения вверх и вниз выше плавающего тела. 2. Система по п.1, в которой передаточный элемент вставлен в широкое отверстие в плавающем теле, расположенное на поверхности плавающего тела и обращенное в сторону генератора, при этом передаточный элемент с возможностью поворота присоединен к поверхности плавающего тела, расположенной с другой стороны указанного широкого отверстия. 3. Система по п.2, в которой указанное широкое отверстие покрыто гибкой мембраной, которая проходит от плавающего тела к передаточному элементу с обеспечением герметизации плавающего тела от массы воды. 4. Система по п.1, в которой плавающее тело изготовлено из легковесного материала. 5. Система по п.1, в которой плавающее тело является пустотелым. 6. Система по п.1, в которой плавающее тело изготовлено с симметричной формой относительно оси, проходящей через точку присоединения передаточного элемента к плавающему телу. 7. Система по любому из предшествующих пунктов, в которой плавающее тело содержит дополнительную массу, расположенную с возможностью перемещения вдоль вертикальной оси плавающего тела,при этом конкретное расположение указанной массы соответствует конкретному размеру волн или диапазону размеров волн. 8. Система по п.1, в которой передаточный элемент или плавающее тело расположены с возможностью поддержания плавающего тела частично погруженным во время работы системы. 9. Система по п.1, в которой устройство преобразования движения содержит подвижный магнит(10), расположенный внутри индукционной катушки (9), при этом передаточный элемент присоединен к магниту. 10. Система по п.1, в которой устройство преобразования движения содержит вал (19), соединенный с возможностью вращения с передаточным элементом, при этом вал (19) содержит одностороннюю муфту (21), которая подсоединена, когда передаточный элемент перемещается либо вверх, либо соответственно вниз, при этом, когда односторонняя муфта подсоединена, вращение вала (19) обеспечивает вращение еще одного вала (19 а), который соединяет одностороннюю муфту с электрическим генератором (24). 11. Система по п.10, в которой устройство преобразования движения содержит по меньшей мере две односторонних муфты (21 а, 21b), причем первая из указанных по меньшей мере двух односторонних муфт подсоединена, когда передаточный элемент перемещается вверх от дна моря, обеспечивая вращение первого вала в первом определенном направлении вращения, тогда как вторая из указанных двух односторонних муфт в это время находится в высвобожденном состоянии, а когда передаточный элемент перемещается вниз, первая односторонняя муфта находится в высвобожденном состоянии, тогда как вторая односторонняя муфта подсоединена, обеспечивая вращение второго вала во втором определенном направлении вращения, при этом система содержит выполненные с возможностью взаимодействия передачи (18 а, 18b, 18 с), взаимодействующие по меньшей мере с одной односторонней муфтой, а первый и второй валы обеспечивают одно и то же направление вращения подсоединенного генератора (24), независимо от направления перемещения передаточного элемента соответственно вверх или вниз. 12. Система по п.10 или 11, в которой по меньшей мере одна односторонняя муфта (21) подсоединена к генератору (24) через ротационный мультипликатор (22). 13. Система по п.10 или 11, в которой вал, присоединенный к генератору (24), содержит маховик(23). 14. Система по п.1, в которой опорная конструкция содержит по меньшей мере один горизонтальный опорный кронштейн, прикрепленный с возможностью перемещения к вертикальным кронштейнам опорной конструкции и поддерживающий устройство преобразования движения, электрический генератор и передаточный элемент, при этом перемещение указанного по меньшей мере одного горизонтального опорного кронштейна сохраняет относительное расположение устройства преобразования движения,-9 017949 электрического генератора и передаточного элемента. 15. Система по п.14, в которой указанный по меньшей мере один горизонтальный опорный кронштейн перемещается вертикально с обеспечением наименьшей возможной длины передаточного элемента, когда система приведена в действие. 16. Система по любому из предшествующих пунктов, содержащая по меньшей мере два плавающих тела. 17. Система по любому из предшествующих пунктов, содержащая большое количество плавающих тел, изготовленных с такой формой, что когда они расположены относительно друг друга, они образуют по меньшей мере одну сторону конструкции, которая выглядит как плоская поверхность, с обеспечением расположения системы перпендикулярно фронту приходящей воды, когда система расположена в массе воды.
МПК / Метки
МПК: F03B 13/18
Метки: способ, преобразования, электрическую, волн, система, энергии, энергию
Код ссылки
<a href="https://eas.patents.su/25-17949-sistema-i-sposob-dlya-preobrazovaniya-energii-voln-v-elektricheskuyu-energiyu.html" rel="bookmark" title="База патентов Евразийского Союза">Система и способ для преобразования энергии волн в электрическую энергию</a>
Система и способ преобразования движения океанских волн в электрическую энергию
Номер патента: 2702
Опубликовано: 29.08.2002
Авторы: Норс Вон У., Крофт Джеймс III, Девриз Кеннет Лоранс
МПК: F03B 13/12
Метки: движения, система, электрическую, волн, способ, преобразования, океанских, энергию
Формула / Реферат:
1. Система преобразования периодического движения волн океана в электрическую энергию, содержащая датчики давления, расположенные стационарно на дне океана под водой и местом движения волн (i) для регистрации изменений высоты столба воды над датчиками давления и (ii) для получения импульса электрической энергии в соответствии с изменением силы, связанной с изменением высоты столба воды; средство переноса импульса электрической энергии от...
Устройство для преобразования тепловой энергии в электрическую энергию
Номер патента: 15843
Опубликовано: 30.12.2011
Автор: Крииса Тоомас
МПК: H01L 35/00, H01J 45/00
Метки: устройство, электрическую, энергию, тепловой, преобразования, энергии
Формула / Реферат:
1. Источник тока, включающий подложку, имеющую последовательные слои, включающиеслой металла с локализованными энергетическими уровнями на нижней границе зоны проводимости и высокой вероятностью возбуждения электронов из локализованного энергетического уровня у нижней границы зоны проводимости к поверхности Ферми;полупроводниковый слой, находящийся в выпрямляющем контакте со слоем металла и выполняющий функцию фильтра, при этом указанный слой...
Способ преобразования паровой энергии в механическую энергию
Номер патента: 1492
Опубликовано: 23.04.2001
Авторы: Березин Сергей Романович, Левин Борис Исаакович
МПК: F01K 27/00, F01K 7/00
Метки: энергии, преобразования, паровой, способ, энергию, механическую
Формула / Реферат:
1. Способ преобразования энергии пара в механическую энергию, заключающийся в генерировании пара, подаче перегретого пара под давлением в паровую винтовую машину, расширении пара с преобразованием потенциальной энергии пара непосредственно в механическую энергию, отличающийся тем, что перед подачей перегретого пара в паровую винтовую машину в перегретый пар впрыскивают воду, расход "D" которой определяют из соотношения D >=...
Способ повышения эффективности преобразования солнечной энергии в электрическую и устройство для его реализации
Номер патента: 17011
Опубликовано: 28.09.2012
Авторы: Гашимов Ариф Мамед Оглы, Сафаров Нуру Араб Оглы, Байрамов Азад Агалар Оглы, Мурсакулов Ниязи Несреддин Оглы
МПК: H01L 31/0392
Метки: устройство, преобразования, реализации, повышения, способ, эффективности, электрическую, энергии, солнечной
Формула / Реферат:
1. Гибридный фотоэлектрический преобразователь, содержащий пленку из полупроводникового полимерного широкозонного фотоэлектрического преобразователя, поверх прозрачной пленки окиси титана (TiOx), отличающийся тем, что эти пленки размещены на низкоомном кристаллическом кремнии, при этом поверх полимерной пленки нанесена текстура с антиотражающим покрытием.2. Способ преобразования солнечной энергии в электрическую с использованием...
Устройство для преобразования энергии вертикального воздушного потока в электрическую
Номер патента: 8277
Опубликовано: 27.04.2007
Авторы: Городов Михаил Иванович, Сидоренко Юрий Петрович, Ерохов Николай Михайлович, Чабанов Владислав Алимович, Филипенко Евгений Семенович, Воронков Алексей Алексеевич, Чабанов Алим Иванович, Матасов Рев Александрович, Жигайло Виктор Никифорович, Алтухов Борис Иванович, Андрианов Иван Тимофеевич, Смарж Иван Ильич, Королев Владислав Михайлович, Мартынов Владимир Георгиевич, Щукин Георгий Лукич, Баженов Андрей Николаевич, Сычев Михаил Парфенович
Метки: воздушного, устройство, энергии, потока, вертикального, электрическую, преобразования
Формула / Реферат:
1. Устройство для преобразования энергии вертикального воздушного потока в электрическую, содержащее вертикально расположенный воздухонаправляющий цилиндрический канал, вход которого снизу подключен к источнику воздушного потока с регулируемыми значениями осевой - вертикальной и тангенциальной - вращательной компонент его скорости и выход - к вертикальному воздухоотводящему каналу, а внутри него установлен ветротурбоэлектрогенератор, в котором...
Предыдущий патент: Лечение и профилактика гриппа
Следующий патент: Диспергирующие флюиды и способы применения таковых
Случайный патент: Способ окисления под давлением золотоносных руд, содержащих тугоплавкие сульфиды и органические углеродистые вещества