Устройство и способ анализа размера, формы и угловатости, а также состава минералов и частиц горных пород
Номер патента: 10956
Опубликовано: 30.12.2008
Авторы: Ли Джейсон, Хофер Вера, Хельгасон Торгейр, Мёллер Агнар Томас, Пильц Юрген, Смит Мэлвин Л., Бенедиктссон Йон Атли, Торгейрссон Трюггви
Формула / Реферат
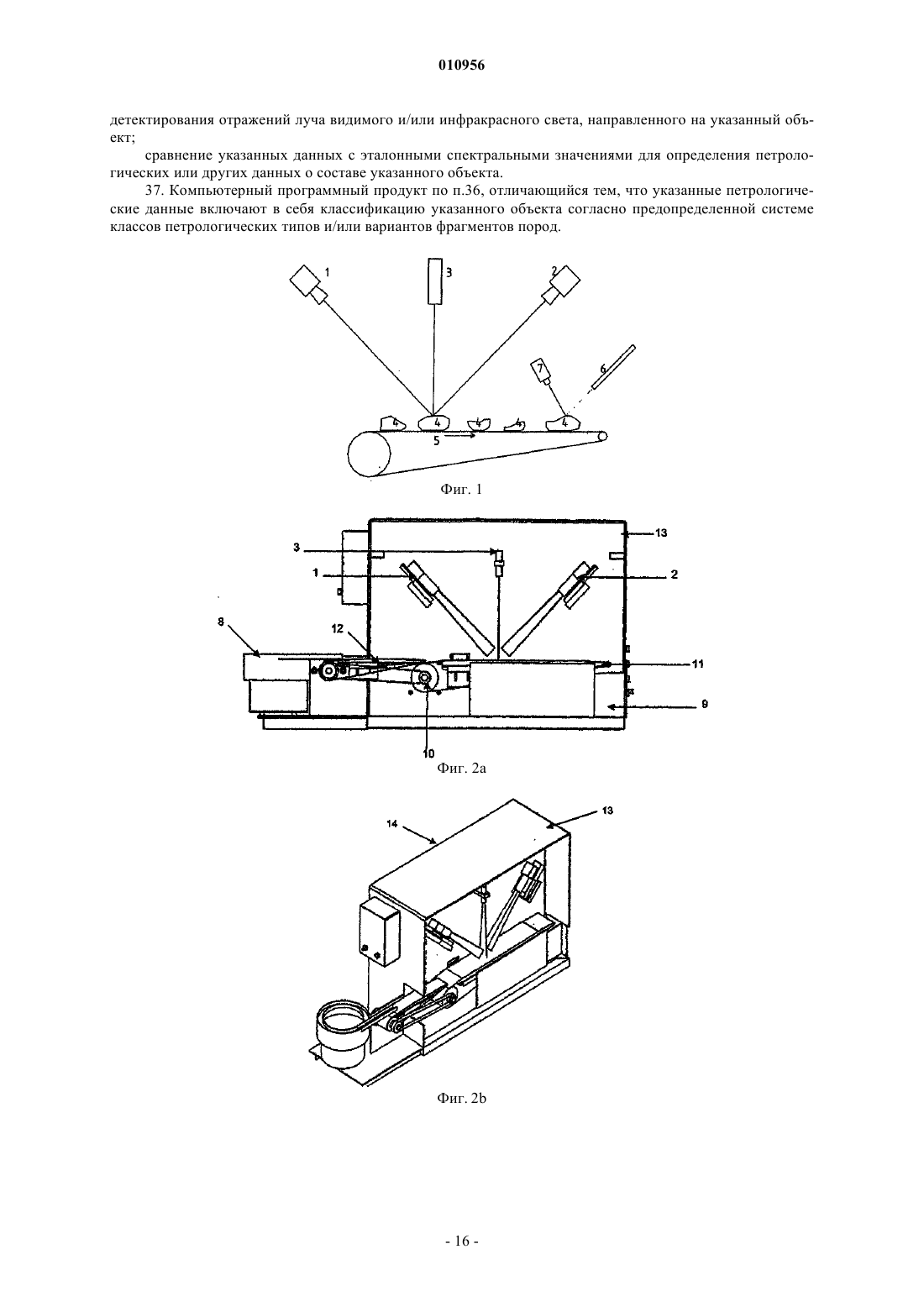
1. Устройство для автоматического анализа размеров и формы набора объектов-образцов, отобранных из множества минералов, фрагментов породы, гравия, естественных, изготовленных или переработанных композитов и т.д., включающее в себя следующие компоненты:
a) модуль подачи, предназначенный для помещения указанных объектов с определенным разнесением в одном потоке на ленту конвейера;
b) источник освещения, предназначенный для создания коллимированного пучка света, направляемого перпендикулярно на указанную ленту конвейера;
c) средство фиксации изображения, включающее в себя по меньшей мере один датчик изображения, предназначенный для съемки изображения отражения указанного плоского луча, освещающего указанный объект,
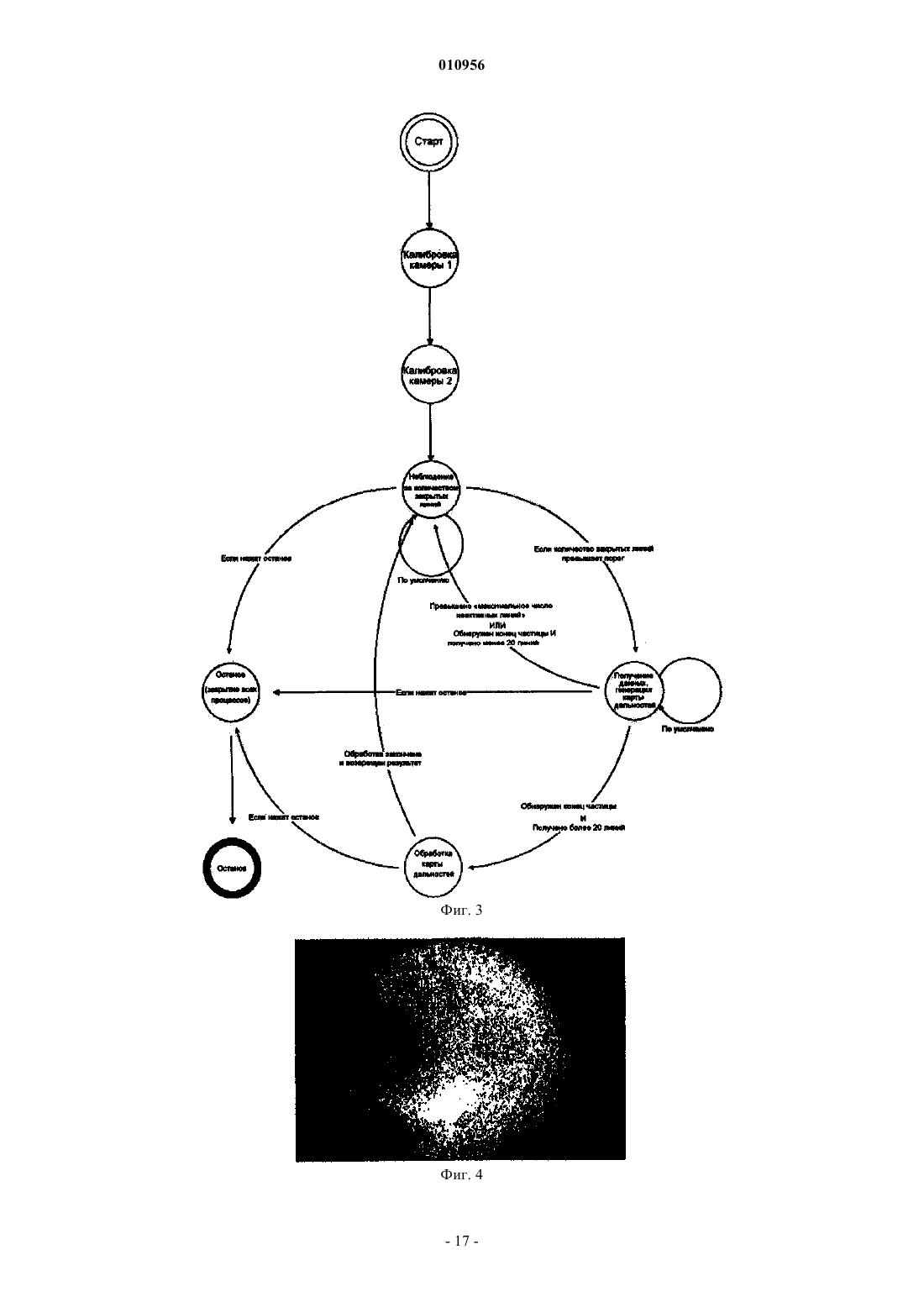
причем устройство также включает в себя систему управления, содержащую систему обработки, включающую в себя компьютерную программу и память и предназначенную для управления механическими и аппаратными компонентами оборудования и для хранения зафиксированных изображений, причем система управления выполнена с возможностью обработки последовательности изображений указанного объекта с целью автоматического определения размеров и формы указанных объектов и вычисляет параметры, представляющие размеры и форму объектов, причем указанные параметры формы включают в себя параметры, описывающие форму и угловатость.
2. Устройство по п.1, отличающееся тем, что указанное средство фиксации изображения включает в себя по меньшей мере два датчика изображения, предназначенные для фиксации изображения указанного отражения плоского луча, направленного на объект под различными углами по отношению к плоскому лучу.
3. Устройство по п.1, отличающееся тем, что механизм подачи выбирается из следующих механизмов подачи: вибрационный спиральный элеватор, механизм подачи с дозатором.
4. Устройство по п.2, отличающееся тем, что на каждой стороне указанного плоского луча размещается по меньшей мере по одному из двух датчиков изображения таким образом, что горизонтальная ось каждой из плоскостей изображения ориентируется перпендикулярно к направлению движения ленты конвейера параллельно с плоским лучом.
5. Устройство по п.1, отличающееся тем, что оно предназначается для автоматического анализа по меньшей мере около 100 указанных объектов-образцов наибольшим диаметром менее 100 мм/ч, и предпочтительно по меньшей мере около 400 указанных объектов-образцов наибольшим диаметром менее 100 мм/ч.
6. Устройство по п.1, отличающееся тем, что система управления выполнена с возможностью обработки последовательности изображений и получающегося трехмерного изображения поверхности указанного объекта посредством компьютерной программы и вычисления одного или нескольких из следующих параметров: размеры объектов; величины длинных, средних и коротких осей; коэффициент удлинения и коэффициент лещадности; класс формы; эквивалентный индекс формы; эквивалентный индекс лещадности; сферичность; значение округлости или угловатости; статистическое распределение одного или нескольких из указанных параметров для множества анализируемых частиц.
7. Устройство по п.6, отличающееся тем, что система управления выполнена с возможностью определения параметра размеров для указанных объектов и распределения размеров, класса формы и распределения классов форм, класса угловатости и распределения угловатости.
8. Устройство по любому из пп.1-7, отличающееся тем, что параметры формы дополнительно включают в себя параметр текстуры поверхности, определяющий гладкость/шероховатость.
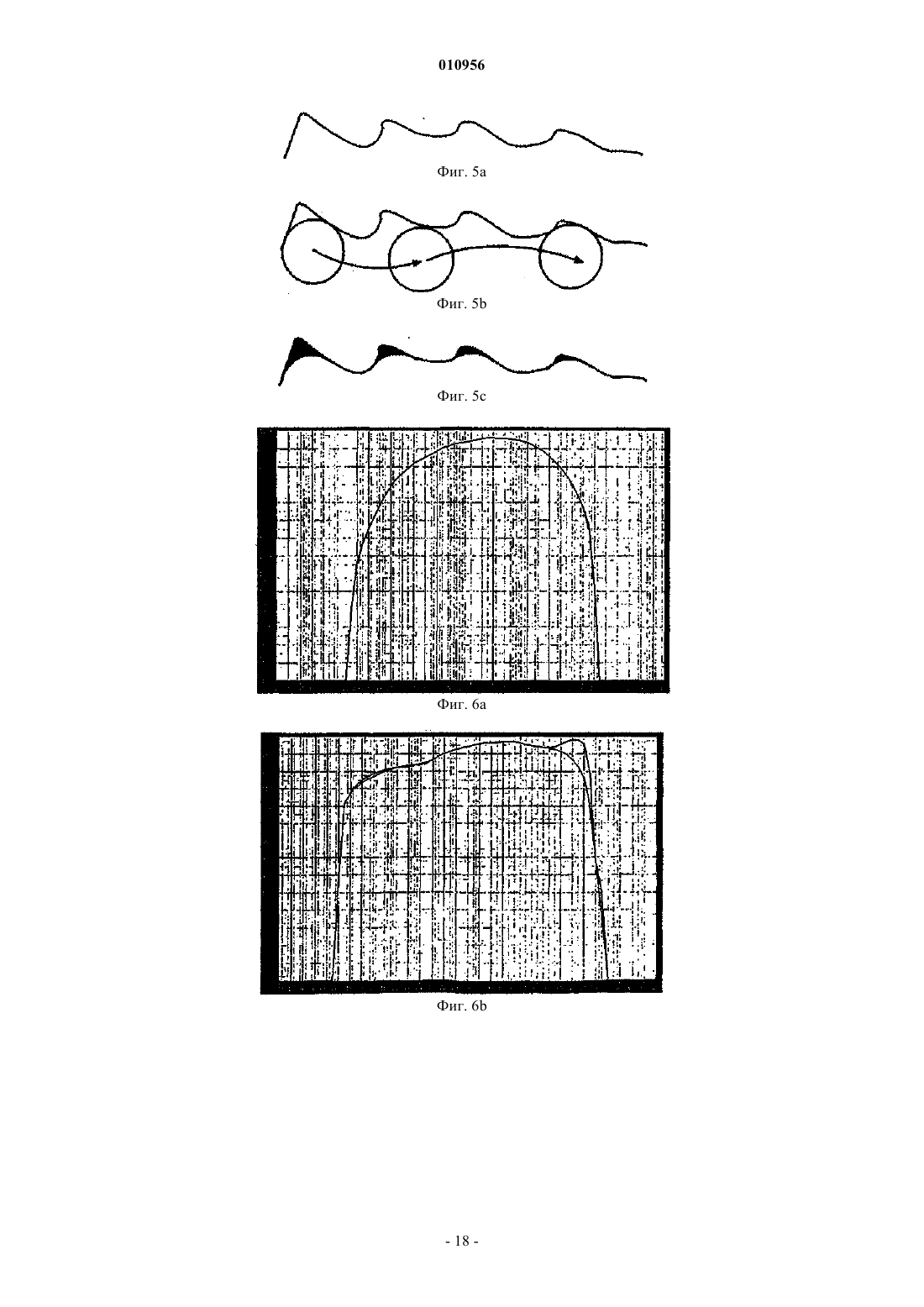
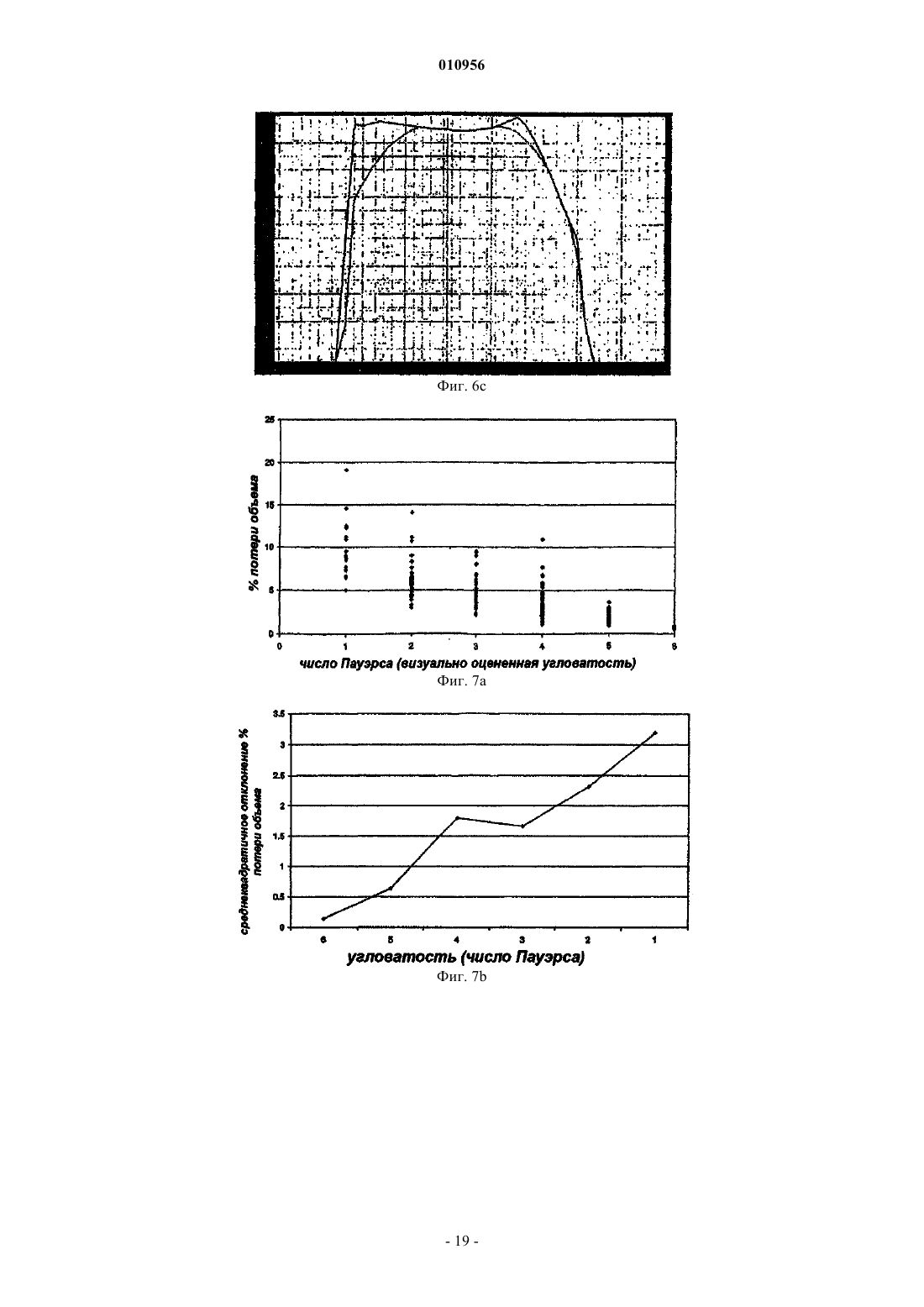
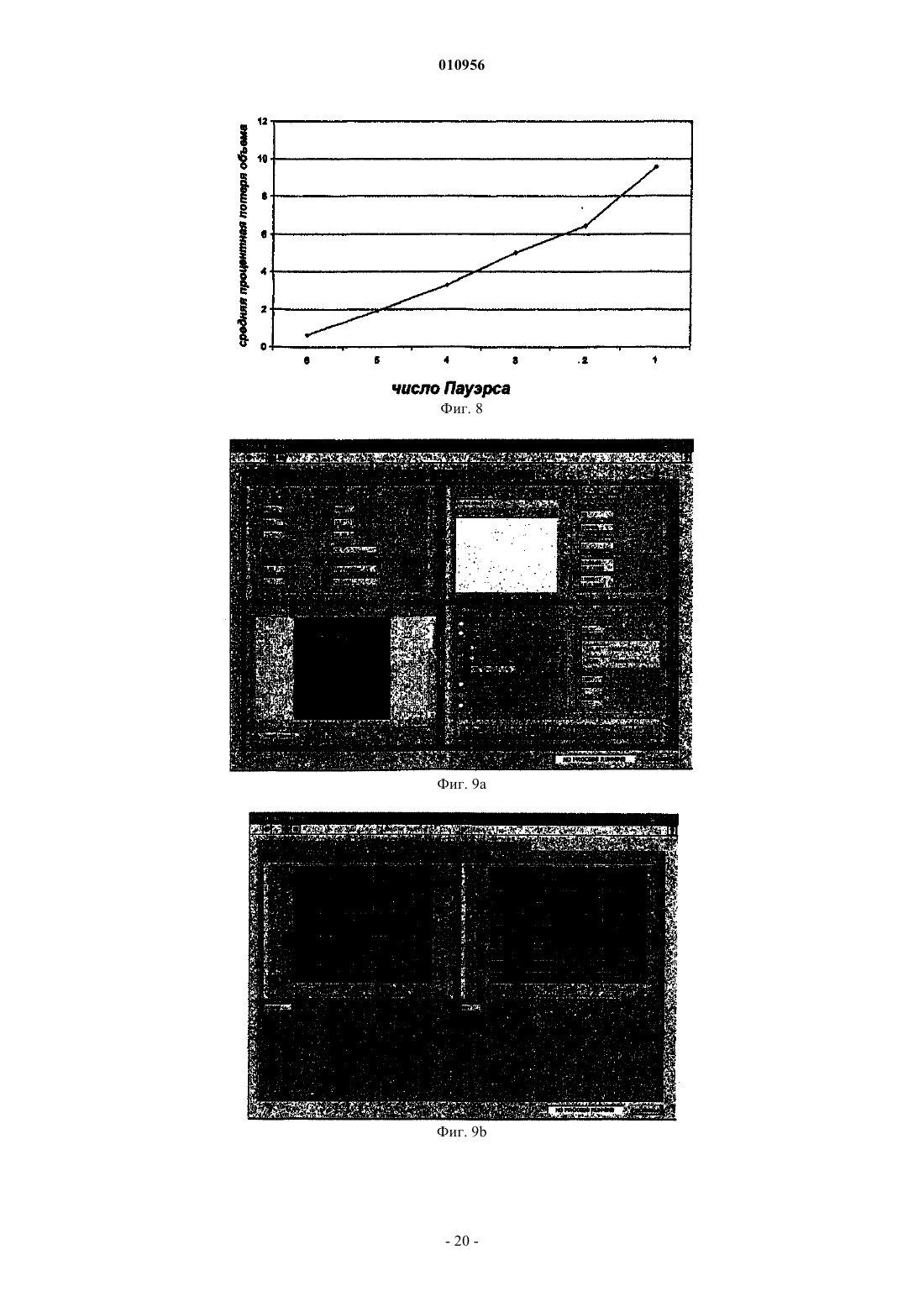
9. Устройство по любому из пп.1-8, отличающееся тем, что система управления выполнена с возможностью обработки последовательности изображений посредством морфологического алгоритма с целью вычисления значения мнимой потери объема, связанного с параметром округлости или угловатости и/или классом.
10. Устройство по п.9, отличающееся тем, что морфологический алгоритм основан на использовании структурного эллипсоидального элемента, причем указанный элемент определяется для каждой анализируемой частицы, имеющей коэффициенты пропорциональности, близкие к коэффициентам пропорциональности указанной частицы.
11. Устройство по п.10, отличающееся тем, что константа пропорциональности, которая определяет отношение между размером указанной частицы и размером указанного структурного элемента, находится в диапазоне примерно от 1:3 до 1:10, предпочтительно в диапазоне от примерно 1:4 до примерно 1:10.
12. Устройство по п.1, отличающееся тем, что дополнительно включает в себя источник освещения, создающий луч видимого и/или инфракрасного света; спектрофотометрический датчик, предназначенный для детектирования отражения указанного луча от освещаемого участка указанного объекта и измерения спектра поглощения или отражения в видимом и/или инфракрасном диапазоне, и система управления выполнена с возможностью обработки указанного спектра и его сравнения с опорными спектрами и/или спектральными значениями в эталонных материалах с целью классификации указанного объекта согласно предопределенной системе классов типов и/или вариантов минералов и частиц пород и подобных объектов.
13. Устройство по п.12, отличающееся тем, что источник видимого и инфракрасного освещения излучает видимый и инфракрасный свет, имеющий диапазон длин волн от примерно 340 до примерно 1200 нм, причем указанный диапазон детектируется датчиком.
14. Устройство по любому из пп.1-13, отличающееся тем, что дополнительно включает в себя средства взвешивания для взвешивания каждого объекта.
15. Способ определения размеров и формы объектов в наборе объектов в образце, отбираемом из минералов, фрагментов породы, гравия, естественных, изготовленных или переработанных агрегатов и т.д., причем определение формы включает в себя, по меньшей мере, определение параметра или класса формы, устанавливающего удлиненность и/или уплощеность частицы, и определение угловатости, причем указанный способ включает в себя следующие шаги:
размещение указанных объектов с некоторыми интервалами на движущейся ленте конвейера;
освещение последовательного потока объектов коллимированным пучком света, ориентированным перпендикулярно направлению движения конвейера;
фиксирование посредством по меньшей мере одного датчика изображения изображений диффузного отражения указанного плоского луча, освещающего указанный объект, и сохранение указанных изображений в памяти таким образом, что для каждого объекта создается и сохраняется набор изображений с постоянной минимальной частотой, зависящей от заданной скорости конвейера;
обработка набора изображений для каждого объекта, прошедшего под плоским пучком света, для получения данных о поверхности в трех измерениях, или контурной карты и топографических данных, описывающих указанный объект;
определение параметра размеров и параметров формы на основе указанных полученных данных для указанных объектов,
причем указанные параметры формы включают в себя параметр и/или классификацию формы, указывающий на удлиненность и/или уплощеность частицы, а также параметр и/или классификацию угловатости.
16. Способ по п.15, отличающийся тем, что включает в себя фиксацию изображений с использованием по меньшей мере двух датчиков изображения, расположенных по одному на каждой стороне указанного коллимированного пучка света.
17. Способ по п.15, отличающийся тем, что включает в себя сбор данных о размерах и форме, в том числе данных о форме, определяющих удлинение и уплощенность, и данные угловатости/округлости для каждого объекта в указанном наборе объектов, а также вычисление параметров, представляющих средние и изменяющиеся значения размеров и формы анализируемых объектов в указанном образце.
18. Способ по п.17, отличающийся тем, что размеры объекта представляют эллипсом, вычисляемым по короткой и средней осям указанного объекта.
19. Способ по п.17, отличающийся тем, что размеры объектов обозначают расчетным объемом на основе измерений размерностей и предопределенной формы.
20. Способ по п.19, отличающийся тем, что выполняют вычисление эллипсоида по трем осям, представляющим внешние размхЁы объекта, причем указанный эллипсоид представляет собой аппроксимацию объема объекта, используемую для генерации распределения размеров для множества анализируемых объектов.
21. Способ по любому из пп.15-20, отличающийся тем, что параметр и/или классификация формы включает в себя классификацию формы, по меньшей мере, по следующим четырем классам: в основном сферические объекты, в основном плоские объекты, в основном удлиненные объекты, в основном удлиненные и уплощенные объекты.
22. Способ по любому из пп.15-21, отличающийся тем, что в алгоритме математической морфологии при определении угловатости объекта используют эллипсоидальный структурирующий элемент с осями, пропорциональными осям объекта.
23. Способ по п.22, отличающийся тем, что константа пропорциональности, определяющая отношение между размером указанной частицы и размером указанного структурирующего элемента лежит в диапазоне примерно от 1:3 до 1:10, предпочтительно в диапазоне от примерно 1:4 до примерно 1:10.
24. Способ по п.23, отличающийся тем, что константа пропорциональности лежит в диапазоне примерно от 1:4 примерно до 1:8.
25. Способ по любому из пп.15-24, отличающийся тем, что параметр и/или классификация угловатости включает в себя схему классификации с множеством классов.
26. Способ по любому из пп.15-25, дополнительно включающий в себя освещение каждого объекта, помещенного на конвейер, лучом видимого и/или инфракрасного света, детектирование отражения указанного луча от освещенного участка указанного объекта и измерение спектрального коэффициента поглощения или отражения в видимой и/или инфракрасной области, сравнение указанного спектра с эталонными спектральными значениями с целью определения петрологических или других данных о составе указанного объекта.
27. Способ по п.26, отличающийся тем, что петрологические данные включают в себя классификацию указанного объекта согласно предопределенной системе классов и/или вариантов петрологических типов твердых частиц.
28. Компьютерный программный продукт, загружаемый на компьютере и предназначенный для управления получением данных изображения набора объектов, отобранных из минералов, фрагментов породы, гравия, а также естественных, изготовленных или переработанных агрегатов и т.д., и анализа этих данных, причем указанный компьютерный программный продукт содержит командные средства, согласно командам которых после загрузки и запуска на компьютере процессор компьютера выполняет следующие действия:
получение входных данных по меньшей мере от двух датчиков изображения, сконфигурированных соответствующим образом для фиксации последовательных изображений отражения плоского когерентного луча, падающего перпендикулярно направлению движения потока указанных объектов, транспортируемых с заданной скоростью, с минимальной заданной частотой;
сохранение указанных изображений и обработка изображений для каждого объекта с целью получения данных, описывающих размеры указанного объекта, и данных о поверхности в трех измерениях, или контурной карты и топографических данных, представляющих указанный объект;
определение одного или нескольких параметров размеров и формы для указанных объектов на основе указанных полученных данных, при этом указанные параметры формы включают в себя параметр и/или классификацию формы, указывающую на удлиненность и/или уплощенность частицы, и параметр и/или классификацию округленности/шероховатости.
29. Компьютерный программный продукт по п.28, дополнительно включающий в себя программные средства, реализующие сбор данных о размерах и форме, в том числе данных о форме, указывающую на удлиненность и уплощенность, а также данные об угловатости/округлости для каждого объекта в указанном наборе объектов, и вычисление параметров, представляющих значения средних и динамически изменяющихся размеров и формы в указанном наборе объектов.
30. Компьютерный программный продукт по п.28 или 29, отличающийся тем, что параметр формы и/или классификация включают классификацию формы, по меньшей мере, по следующим четырем классам: в основном сферические объекты, в основном плоские объекты, в основном удлиненные объекты, в основном удлиненные и уплощенные объекты.
31. Компьютерный программный продукт по любому из пп.28-30, отличающийся тем, что размер объектов обозначается расчетным объемом на основе измеренных размерностей и предопределенной формы.
32. Компьютерный программный продукт по п.31, отличающийся тем, что выполняется вычисление эллипсоида по трем осям, которые представляют внешние размеры объекта, причем указанный эллипсоид представляет собой аппроксимацию объема объекта, используемую при генерации распределения размеров для множества анализируемых объектов.
33. Компьютерный программный продукт по любому из пп.28-32, отличающийся тем, что в алгоритме математической морфологии при определении угловатости объекта используется эллипсоидальный структурирующий элемент с осями, пропорциональными осям объекта.
34. Компьютерный программный продукт по п.33, отличающийся тем, что константа пропорциональности, определяющая отношение между размером указанной частицы и размером указанного структурирующего элемента, лежит в диапазоне примерно от 1:3 до 1:10, предпочтительно в диапазоне от примерно 1:4 до примерно 1:10.
35. Компьютерный программный продукт по п.34, отличающийся тем, что константа пропорциональности лежит в диапазоне примерно от 1:4 примерно до 1:8.
36. Компьютерный программный продукт по любому из пп.28-35, далее выполняющий следующие шаги:
получение спектрофотометрических входных данных от спектрометра, сконфигурированного для детектирования отражений луча видимого и/или инфракрасного света, направленного на указанный объект;
сравнение указанных данных с эталонными спектральными значениями для определения петрологических или других данных о составе указанного объекта.
37. Компьютерный программный продукт по п.36, отличающийся тем, что указанные петрологические данные включают в себя классификацию указанного объекта согласно предопределенной системе классов петрологических типов и/или вариантов фрагментов пород.

Текст
010956 Область техники, к которой относится изобретение Настоящее изобретение в основном относится к оборудованию и способам анализа частиц минералов и пород, и, более конкретно, к новому устройству и способам автоматического анализа таких частиц,основанным на оптических и спектрофотометрических методах и предназначенным для определения размеров, формы, в том числе геометрической формы и угловатости, и состава минералов и частиц горных пород, и последующей классификации частиц по размерам, форме и петрографическому типу. Уровень техники В настоящее время существуют известные классические (ручные и механические) способы анализа размеров, петрологического описания и других видов анализа минералов и частиц пород; эти способы обычно используются в производстве строительных заполнителей для проверки качества и оценки, например заполнителей для строительства дорог и заполнителей бетона. Однако традиционные способы часто требуют наличия высококвалифицированных специалистов, и даже в этом случае сложно получать стабильные результаты; кроме того, такие процессы анализа являются утомительными, трудомкими и дорогими. Соответствующие способы и оборудование для оптического анализа частиц минералов и пород описаны в предыдущем уровне техники, например в документах WO 02/090942-А 1; 29800809-U1 DE; 20117494-U1 DE; DE 2520219141-U1; US 6061130; US 5309215. Вместе с тем, способы и устройства, описанные в перечисленных документах, не позволяют производить трехмерный анализ для автоматического определения размеров и формы минералов и частиц пород (например, классификации по форме и угловатости), а также не реализуют анализ петрографического состава. Таким образом, существует потребность в способах и оборудовании, обеспечивающих надежное,стабильное и высокопроизводительное исследование частиц минералов и пород с целью определения размеров, формы и предпочтительно состава таких частиц. Сущность изобретения Задача, на решение которой направлено настоящее изобретение, заключается в создании устройства и способа, предназначенных для высокопроизводительного анализа объектов/частиц в образце, отобранном из минералов, фрагментов пород, гравия, а также естественных, изготовленных или переработанных агрегатов и т.п., причем указанный анализ выполняется с целью автоматического определения размеров и формы каждой частицы/объекта в образце, включающем в себя множество частиц/объектов, при этом определение формы включает в себя определение параметров, описывающих форму и угловатость. Устройство согласно настоящему изобретению включает в себя следующие компоненты: соответствующая система подачи, предназначенная для подачи указанных объектов в одноуровневом потоке,имеющем заданную максимальную ширину, таким образом, что объекты отделяются друг от друга некоторым расстоянием (т.е. не накладываются друг на друга и не соприкасаются); оптическая система фиксации изображения, предназначенная для получения данных о поверхности каждого объекта в трех измерениях; система управления, имеющая средства обработки и специальное программное обеспечение,осуществляющее обработку изображений указанных объектов и автоматическое определение размеров и формы указанных объектов, которое возвращает параметры, описывающие размеры и форму объектов. Кроме того, устройство предпочтительно содержит систему спектрального анализа, предназначенную для получения спектров образцов, которые далее обрабатываются системой управления с целью получения данных, описывающих состав и/или петрографический тип объектов-образцов. Устройство и способ по изобретению обеспечивают автоматический и высокоскоростной анализ петрологических образцов,выполняемый, например, с целью оценки качества и пригодности конструкций, бетона, дорожных работ и другими подобными целями. К настоящему времени такие исследования выполняются с применением утомительных полумеханических способов (просеивание и размол) и ручного визуального анализа. Другой аспект изобретения включает в себя способ определения размеров и формы объектов в наборе объектов в образце, отобранном из минералов, фрагментов пород, гравия, а также естественных,изготовленных или переработанных агрегатов и т.п., причем определение формы включает в себя, по меньшей мере, определение параметра или класса формы, удлиненности и/или уплощенности частиц,угловатости. Еще один аспект включает в себя компьютерный программный продукт, предназначенный для выполнения анализа данных и операций определения посредством описываемых способов, а также управления операциями сбора данных. Краткое описание фигур чертежей Другие свойства и достоинства настоящего изобретения станут ясны из нижеследующего описания,содержащего ссылки на прилагаемые чертежи, которые иллюстрируют вариант осуществления изобретения, не вносящий каких-либо ограничений. На фиг. 1 представлена общая схема системы триангуляции с лазером и камерами, предназначенной для оптической съемки и анализа поверхностей. Показаны две камеры 1 и 2 и лазер 3, причем луч лазера направлен на объект 4. Стрелкой 5 показано направление движения конвейера 11. Цифрой 6 обозначен источник инфракрасного и/или видимого света, который устанавливается при необходимости, цифрой 7 обозначен спектрофотометр, предназначенный для измерения величины поглощения инфракрасного-1 010956 и/или видимого света объектами-образцами 4; на фиг. 2 приведена общая схема предпочтительного варианта осуществления устройства по изобретению; на фиг. 3 приведена схема структуры программы, являющейся компонентом системы управления, и программы для оптического анализа отснятой поверхности, описанного более подробно в примере 1; на фиг. 4 показана карта дальностей по интенсивностям без окклюзий и перспективных искажений,представляющая частицу, в отношении которой будет выполняться анализ с использованием описываемого алгоритма математической морфологии; на фиг. 5 показан процесс определения потери объема ("потерянный объем" или "объем углов") на угловатой поверхности с применением методики математической морфологии "катящийся шар"; на фиг. 5 а показана исходная поверхность, для которой применяется преобразование (фиг. 5b), при этом удаляются любые точки, которые невозможно описать эллипсоидальным структурирующим элементом (фиг. 5 с); на фиг. 6 показаны поперечные сечения трех частиц, полученных из отснятых карт дальностей. Внешняя линия представляет исходную границу, внутренняя линия представляет границу после морфологического открытия. На фиг. 6 а изображена достаточно округленная частица, на фиг. 6b - несколько округленная частица, на фиг. 6 с - угловатая частица; на фиг. 7 а представлен график разброса потери объема, определяемого согласно изобретению (см. пример 2), в зависимости от визуально оцененной угловатости для каждой частицы, классифицированной по шкале Пауэрса, которая отражает изменение потери объема с ростом класса угловатости. На фиг. 7b представлен график среднеквадратичного отклонения процентного объема для каждого класса в зависимости от числа Пауэрса, оцененного вручную; на фиг. 8 показано соотношение между средней процентной потерей объема, определенной автоматически способом по изобретению, и числом Пауэрса для каждой категории; на фиг. 9 показаны снимки экранов, сгенерированные программным обеспечением в процессе осуществления изобретения; на фиг. 9 а показан экран, содержащий данные измерений для отдельного объекта, в том числе длину по осям, класс угловатости, класс формы, объем углов и т.д.; на фиг. 9b показано распределение размеров включенных частиц для некоторого образца по объему образца (слева) и номеру объекта-образца (справа); на фиг. 9 с показано распределение объектов-образцов по угловатости и классам формы по объему (слева) и номеру (справа). Сведения, подтверждающие возможность осуществления изобретения Устройство по настоящему изобретению может быть сконфигурировано для обработки конкретных типов образцов, но в общем случае предназначается для автоматического анализа наборов образцов,включающих в себя множество объектов/частиц, таких как минералы, фрагменты пород, гравий, естественные, изготовленные или переработанные агрегаты и т.п. Используемый термин "форма" в данном случае в основном относится к макроскопической форме и угловатости объекта, а также предпочтительно к текстуре поверхности. Параметр "форма" в данном случае используется для классификации анализируемых объектов по соотношению главных осей объекта(длинной, средней и короткой). Соответственно, объекты могут быть разделены на четыре категории: удлиненные, уплощенно-удлиненные, плоские и кубические, как показано на фиг. 9 с. Если все оси достаточно близки по величине, объект классифицируется как кубический; если средняя и малая оси близки по величине, а длинная ось существенно больше, объект классифицируется как удлиненный; если длинная и средняя оси близки по величине и существенно больше короткой оси, объект классифицируется как плоский; если все оси различны, т.е. длинная ось существенно больше средней оси, которая, в свою очередь, существенно больше короткой оси, объект классифицируется как удлиненно-уплощенный. Для определения границ между классами формы могут выбираться различные предельные значения; например, в одной из схем классификации две оси считаются близкими по величине, если соотношение между ними составляет менее 0,67 (короткая ось:длинная ось), но это значение можно также установить равным, например, 0,5 или 0,75. Эти различные формы могут также выражаться в терминах коэффициента лещадности или коэффициента удлинения. В данной области техники частица считается лещадной, если ее толщина составляет менее 0,5 или 0,67 ее ширины, и "удлиненной", если ее ширина составляет менее 0,5 или 0,67 ее длины, в зависимости от применяемых стандартов. Такая классификация полностью согласуется со способами по настоящему изобретению, поскольку позволяет группировать обмеряемые объекты в зависимости от измеренных отношений главных осей и выбирать интервалы для определения групп, описывающих соответствие классификации по сравнительным измерениям, соответствующие классическим измерениям посредством кронциркуля. Устройство включает в себя механизм подачи, предназначенный для помещения объектов-образцов на ленту передачи таким образом, что объекты разделяются некоторым расстоянием, в одноуровневом потоке, причем объекты не накладываются друг на друга и не соприкасаются. В некоторых вариантах осуществления объекты выстраиваются точно по одной линии таким образом, что в область съемки устройства в один момент времени поступает один объект-образец, однако, одновременно может произво-2 010956 диться съемка двух или более объектов, если средства съемки и анализирующее программное обеспечение способны различать объекты. В соответствии с изобретением может использоваться множество вариантов механизма подачи, известных специалисту в данной области техники, таких как один или несколько ленточных конвейеров, размещенных под некоторым углом, например, перпендикулярно, относительно главной подающей ленты устройства. Предпочтительный в настоящее время вариант осуществления включает в себя вибрирующий спиральный элеватор 8, показанный на фиг. 2, размеры которого зависят от конкретных анализируемых образцов. Соответствующие спиральные элеваторы поставляются компанией ScanVibro, Дания. Могут использоваться и другие конфигурации, такие как вибрационные механизмы подачи с дозаторами, например, производства Vibratechniques Ltd., (Великобритания). Главный конвейер 11, используемый в устройстве, может быть выбран специалистом в данной области техники и предпочтительно приводится в действие соответствующим высокоточным двигателем для поддержания постоянной скорости конвейера в процессе работы устройства. В одном варианте осуществления используется электрический двигатель, скорость которого непосредственно зависит от частоты питающего его тока, при этом точное управление частотой осуществляется посредством регулируемого контроллера частоты. В конфигурации на фиг. 2 подающий конвейер 12 транспортирует объекты от механизма 8 подачи на главный конвейер 11, при этом подающий конвейер работает на более низкой скорости и выполняет дополнительную функцию дискретного распределения объектов. Главный конвейер 11 приводится в действие роликом 10, который соосно соединен с электродвигателем, установленным на дальней панели 14 крышки 13. Открытая сторона крышки 13 также может быть закрыта съемной передней панелью (не показана). Оптическая съемка и анализ поверхности Устройство имеет источник освещения, который испускает плоский пучок света (коллимированный и предпочтительно когерентный свет), падающий на главную ленту конвейера; как правило, луч ортогонален направлению движения, а также предпочтительно поверхности ленты. В одном варианте осуществления используется когерентный свет лазерного светодиода, снабженного соответствующей линзой и создающего коллимированный плоский когерентный луч света. Ширина луча на поверхности ленты определяет максимальную допустимую ширину анализируемых объектов; для типичных образцов агрегатов пород соответствующая ширина луча составляет 40-160 мм, в диапазоне около 40-100 мм, например в диапазоне 40-80 мм, т.е. около 50 или 60 мм, или выше, например около 100, 120, 140 или 160 мм. Можно выполнять анализ и более длинных объектов, при условии, что их длинная ось расположена относительно ленты таким образом, что ширина объекта в направлении поперек ленты не превышает ширину луча. Ширина луча в направлении, перпендикулярном поверхности самого луча, влияет на разрешающую способность анализа поверхности; предпочтительно ширина на максимально высокой точке поверхности анализируемого объекта составляет менее около 0,1 мм, например 0,05 мм или меньше. С другой стороны, задать ширину луча затруднительно; наблюдаемая ширина будет зависеть от уровня окружающей освещенности, текстуры поверхности, на которую проецируется свет, и т.д., и в особенности от конфигурации линзы, которая соответственно конфигурируется таким образом, что луч фокусируется на предполагаемой высоте частицы, например 30-40 мм от ленточного конвейера, или ниже для меньших образцов частиц. В особенности изобретение применимо для анализа агрегатов размера гравия (приблизительно от 24 до 40-60 мм) и агрегатов размера камней (от примерно 20-40 до примерно 160 мм) и может также использоваться для анализа частиц размера песка (примерно от 0,5 до 2 мм); при этом потребуются различные конфигурации механизмов подачи, решения по которым известны специалистам в данной области техники. Средство съемки изображения включает в себя по меньшей мере один датчик изображения, как правило, камеру системы "машинного зрения" с объективом и CCD- или CMOS-датчиком, причем выбирается объектив с соответствующим фокусным расстоянием. Датчик(и) размещается соответствующим образом для фиксации изображения диффузного отражения плоского луча света, падающего на объект,двигающийся через область хода луча. Датчик изображения имеет средства управления, позволяющие выполнять съемку изображений с коротким постоянным интервалом, например, около 10 изображений в секунду или более, например не менее 20 изображений в секунду, в том числе по меньшей мере 24 или по меньшей мере 26 изображений в секунду. При наличии более высокоскоростных процессоров возможна более высокая частота, например, в диапазоне 25-120 изображений в секунду, например около 40 или 48 изображений в секунду или до 75 или 100 изображений в секунду. Частота съемки изображений определяет допустимую скорость конвейера и, следовательно, производительность измерений. Для высокоскоростного анализа желательно обеспечить высокую частоту ввода изображений, например по меньшей мере 50 изображений в секунду или по меньшей мере 100 или 120 изображений в секунду. Программное обеспечение и система управления по настоящему изобретению позволяют выполнять высокопроизводительный анализ, и в современных конфигурациях систем может обеспечивать анализ по меньшей мере около 100 объектов с наибольшим диаметром (длинной осью) менее 100 мм/ч и предпочтительно по меньшей мере около 200 фрагментов пород наибольшим диаметром менее 100 мм/ч.-3 010956 Может выполняться анализ и более длинных объектов, при условии, что такие объекты будут укладываться параллельно ленте конвейера и ширина объекта в направлении поперек ленты будет меньше ширины луча. Следовательно, механизм подачи в устройстве предпочтительно конфигурируется таким образом, что объекты размещаются на конвейере длинной осью вдоль направления движения ленты. В предпочтительном варианте осуществления изобретения используется по меньшей мере два датчика изображения, предпочтительно позволяющих фиксировать изображения указанного отражения плоского луча, причем датчики направляются на объект под различными углами к плоскому лучу, предпочтительно по одному на каждой стороне плоского луча, и ориентируются таким образом, что горизонтальная ось каждой из плоскостей изображения перпендикулярна к направлению движения ленты конвейера, параллельно с плоским лучом. Другими словами, датчики предпочтительно ориентируются параллельно с направлением движения ленты, один перед лучом, другой напротив луча, как показано на фиг. 1 и 2. Устройство далее включает в себя систему управления, которая снабжается средствами обработки,имеющими компьютерную программу и память, и осуществляет управление механическими и аппаратными компонентами оборудования, а также хранение отснятых изображений, причем система управления реализует обработку последовательности изображений указанного объекта для автоматического определения размеров и формы указанных объектов и возвращает параметры, представляющие размеры и форму, в том числе угловатость и форму объектов, а также предпочтительно петрологический состав объектов-образцов. В одном варианте осуществления устройства система управления производит обработку последовательности изображений и получаемого трехмерного изображения поверхности указанного объекта посредством компьютерной программы и вычисление одного или нескольких из следующих параметров: размер объектов; величины длинных, средних и коротких осей; коэффициент удлинения и коэффициент лещадности; класс формы; эквивалентный индекс формы; эквивалентный индекс лещадности; шарообразность; значение и/или класс округленности или угловатости; а также статистическое распределение одного или нескольких указанных параметров для множества анализируемых частиц. В предпочтительном варианте осуществления система управления осуществляет обработку последовательности изображений по алгоритму математической морфологии с целью вычисления значения мнимой потери объема, которое коррелирует с параметром и/или классом округленностью или угловатости. Угловатость частицы породы традиционно описывается с использованием одной из шести категорий по шкале Пауэрса, согласно которой 1 означает "очень угловатый", 2 означает "угловатый", 3 означает "несколько угловатый", 4 означает "несколько округленный", 5 означает "округленный", 6 означает"достаточно округленный", как было изначально предложено Пауэрсом. (Powers, M.С. "A new roundnessscale for sedimentary particles" ("Новая шкала округлости для осадочных частиц"), Journal of SedimentaryPetrology (1953) Vol. 23, pp. 117-119). Как описано в настоящем документе более подробно, шкала угловатости может базироваться на измерениях угловатости согласно изобретению. Шкала может иметь в своей основе "процентный объем углов", и на ней могут быть выбраны соответствующие предельные значения для указания интервалов,однозначно классифицирующих объекты аналогично классификации при ручном визуальном анализе по шкале Пауэрса. Авторы обнаружили, что возможно выполнять автоматическую классификацию частиц на классы посредством устройства и способа по изобретению согласно определению угловатости по Пауэрсу и получать достаточную статистическую корреляцию с независимой классификацией, получаемой при ручном визуальном анализе. Анализ морфологии Двойная система триангуляции с лазером и двумя камерами, применяемая в предпочтительном варианте осуществления изобретения, позволяет получить достаточный охват поверхности и создавать полную модель верхней полусферы частицы с высокой эффективностью. Каждая частица, таким образом, может быть представлена как карта дальностей, свободная от окклюзий и перспективных искажений, как показано на фиг. 3. Существует естественное сходство между картами дальностей и морфологией оттенков серого. Контурные данные, получаемые при использовании лазерной триангуляции и представленные в форме карты дальностей, фактически представляют собой свободную поверхность в пространстве R3. Для описания характера морфологии частицы необходимо предположить, что объект в закрытой области ниже видимой поверхности является твердым. Изображение в уровнях оттенков серого, представленное как функция f (х, у) в пространстве R2, в морфологии оттенков серого представляет собой набор точек [х, у, f(х, у)] в пространстве R3. Тень U [f] может быть определена следующим образом: Таким образом, тень набора X в пространстве R3 представляет собой объем точек, содержащихся в пределах тени X, где источник света представляет собой точечный источник света на бесконечном расстоянии в положительном направлении по оси z (Stanley R. Steinberg, S.R. Grayscale Morphology (Морфо-4 010956 логия оттенков серого) CVGIP 35 (1986), pp. 333-355). Это условие соответствует направлению освещения в лазерной системе триангуляции, и тень, таким образом, аналогична тени, отбрасываемой при лазерном освещении. Далее выполняется определение эрозии и расширения в оттенках серого следующим образом. Эрозия изображения f структурирующим элементом g включает в себя перенос структурирующего элемента на каждую точку изображения и определение "минимума различий", т.е. Аналогичным образом, для расширения в оттенках серого выполняется перенос структурирующего элемента на каждую точку изображения и определение "максимума сумм", т.е. В стандартной форме эти операции очень чувствительны к шуму и локальным изменениям интенсивности. При работе с картами дальностей это обстоятельство особенно важно, так как любой импульсный шум, возникающий из-за дифракции лазерного луча и точек окклюзий, может существенно воздействовать на обработку результатов. В мягкой морфологии операторы максимума и минимума, используемые в операциях расширения и эрозии, заменяются на более общую статистику порядков весов. Структурирующий элемент состоит из "твердого" центра и "мягкой" границы, где центр имеет больший вес влияния на операцию, чем граница. Соответственно, определяется структурная система [В, А, k], состоящая из трех параметров: А и В - конечные множества, причем АВ, k - натуральное число, удовлетворяющее условию 1kB. В является структурирующим набором, А - его твердым центром, k - его индексом порядка или параметром повторения. Определяется k-й наименьший и k-й наибольший член набора по минимальному (k) и максимальному (k) соответственно; по соглашению, используемому Koskinen et al. (Koskinen et al. Soft Morphological Filters Proceedings (Успехи в области фильтров мягкой морфологии) of SPIE (1991) Vol. 1568, pp. 262-270), используется знак , обозначающий операцию повторения. Тогда мягкая эрозия изображения f со структурной системой [В, А, k] наилучшим образом определяется следующим выражением: Аналогично, мягкое расширение f [В, А, k] определяется следующим образом: Для эффективности любой морфологической операции критично важен тщательный выбор соответствующего структурирующего элемента. При анализе объектов, выполняемом в соответствии с настоящим изобретением, структурирующий элемент должен быть инвариантным к ориентации частицы и к наклону поверхности частицы в любой точке. Морфологическое открытие должно также приводить к минимальной потере объема в частицах с достаточно округленной поверхностью. Следовательно, при таких ограничениях идеальным выбором является сфера подходящих размеров. Она также представляется в форме карты дальностей. При использовании этого подхода фактически применяется не истинная непрерывная сфера, а дискретное приближение к полусфере. Применение морфологических открытий или закрытий к изображениям в оттенках серого с использованием структурирующего элемента, где значения оттенков серого представляют поверхность полушария, известно как "преобразования с катящимся шаром", первоначально описанные Стернбергом (там же) в качестве средства сглаживания разрывов и удаления шума в изображениях стандартной интенсивности. Указанный подход можно описать следующим образом. В случае морфологического закрытия можно представить прокатывание шара по трехмерной поверхности, описываемой уровнями оттенков серого на изображении. Если поверхность является гладкой с относительно низкой кривизной, то шар соприкасается с поверхностью в каждой точке. С другой стороны, шар не будет соприкасаться с точками поверхности, расположенными в пределах узких углублений или желобков, т.е. в тех областях, где кривизна углубления превышает кривизну сферы. Результирующая функция, таким образом, представляет собой объединение всех путей, по которым может проходить шар, или, более определенно, объединение трансляций сферического структурирующего элемента на каждую точку поверхности. Любые узкие углубления или желобки на поверхности, таким образом, "закрываются". Аналогичным образом, морфологическое открытие можно представить как прокатывание шара по обратной стороне трехмерной поверхности. В этом случае из обработки исключаются выступы с высокой кривизной, например, острые края и углы. Этот вариант показан на фиг. 5. На фиг. 5 а показана исходная поверхность, которая представлена в виде поперечного сечения. Далее применяется преобразование (фиг. 5b). Все точки на поверхности, недоступные для сферы, удаляются (фиг. 5 с). С учетом вышесказанного можно утверждать, что открытие карты дальностей частицы с использованием сферического структурирующего элемента соответствующего размера позволяет получить средство дискриминации разных классов угловатости, выполняемого путем простого анализа доли потерян-5 010956 ного объема ("объема углов") согласно описываемой процедуре. При этом эффективно моделируется естественный процесс изнашивания, в течение которого происходит округление твердых частиц, таких как песок и гравий, с приводом каждой частицы к состоянию "достаточной округленности". Можно предложить, что в этом случае граница структурного элемента должна иметь равное влияние для центра,таким образом для уравнений (4) и (5) А = В. В этом случае параметр ранга k может выбираться в зависимости от ожидаемого уровня шума на картах дальностей. Применимость этого подхода для дискриминации будет явно и в большой степени зависеть от тщательного выбора диаметра используемого сферического структурирующего элемента. Действительно,оригинальные методологии, предложенные для ручной петрологической классификации, определяют угловатость относительно размера частицы. В общем случае в качестве исходного рассматривается авторитетный подход, используемый Уоделлом Wadell, H. Volume, shape and roundness of quartz particles(Объем, форма и округленность частиц кварца), Journal of Geology (1935) Vol. 43, pp. 250-280), на основе которого была построена широко используемая шкала Пауэрса (Powers, там же); в этом подходе предусматривается деление средних радиусов углов двумерного зернистого изображения на радиус максимального вписанного круга. С учетом того, что типичный образец композита может содержать частицы весьма разных размеров, можно эмпирически заключить, что размер структурирующего элемента должен выбираться динамически в зависимости от размера анализируемой частицы. Однако при дальнейшем рассмотрении использование сферического структурирующего элемента приходится подвергнуть критике. Во-первых, высота частицы, которая считается дальностью, ортогональной к плоскости изображения, не будет влиять на абсолютную потерю объема. Частицы с пропорциональными большими высотами должны терять пропорционально меньше объема. В дополнение к этому, угловатость некоторого угла традиционно измеряется относительно максимального вписанного круга в данной проекции(Wadell, там же). Но сфера, имеющая оптимальные пропорции для одной проекции, может не соответствовать другой проекции. Таким образом, для устранения отклонения, связанного с коэффициентами удлинения и уплощения частицы, необходимо заменить сферический структурирующий элемент на эллипсоид с коэффициентами пропорциональности, идентичными этим коэффициентам у анализируемой частицы. Оси структурного элемента остаются параллельными с осями частицы на протяжении всей процедуры, что гарантирует поддержание пропорциональности в любой произвольной двумерной проекции. Размерности агрегатных частиц рассматриваются как фундаментальные свойства и определяются как само собой разумеющиеся, что прямо указывает на необходимость адаптивной генерации структурирующего элемента с такими же пропорциями. Опытным путем авторы определили, что оптимальные результаты дает структурирующий элемент с полуосями в 1/6 длин полуосей частиц. Кроме того, установлено, что могут также использоваться структурные элементы с коэффициентом пропорциональности,аналогичным анализируемой частице, но с другой константой пропорциональности; например, при наличии полуосей со значением в диапазоне от примерно 1/3 до 1/10, например от 1/4 до 1/10 полуосей частицы, т.е. к примеру 1/4, 1/5, 1/7 или 1/8. На фиг. 6 показаны поперечные сечения трех частиц, полученные из отснятых карт дальностей. Внешняя линия обозначает исходную границу, внутренняя линия обозначает границу после морфологического открытия. Изображение на фиг. 6 а получено с достаточно округленной частицы. Из фигуры видно, что граница остается фактически неизменной и потеря объема незначительна. Следует отметить, что при рассмотрении поперечных сечений, подобных показанным на фиг. 6, потеря объема не обязательно соответствует видимому профилю. Например, на фиг. 6 с потеря объема в нижней левой части профиля соответствует углу, не видимому в данной проекции. Анализ текстуры Изображения, полученные описанным выше способом, могут также использоваться для описания более тонкой текстуры (шероховатости) частиц, а также предпочтительно средней текстуры (пористости). Этот процесс легко осуществляется путем анализа по меньшей мере части граничных областей частицы на изображении или профиле поперек верхнего полушария частицы, при этом шероховатость (неровность) граничных областей позволяет определить тонкую текстуру поверхности (гладкость/шероховатость). Измерение и классификация спектрального поглощения/отражения Эффективный вариант осуществления устройства включает в себя следующие компоненты: источник освещения, создающий луч видимого и/или инфракрасного света; спектрофотометрический датчик,предназначенный для детектирования отражения указанного луча от освещаемого участка указанного объекта и измерения спектра поглощения или отражения в видимом и/или инфракрасном диапазоне; система управления, обеспечивающая обработку указанного спектра и его сравнение с опорными спектрами и/или спектральными значениями в эталонных материалах с целью классификации указанного объекта согласно предопределенной системе классов типов и/или вариантов частиц минералов и пород и подобных объектов. Таким образом, устройство и способ по изобретению позволяют автоматически классифицировать образцы пород, композиты и т.д. в соответствии с предопределенной системой классификации. На устройстве предпочтительно конфигурируется классификация образцов согласно системе классификации, описанной в европейском стандарте В 932-3, таким образом, что объекты-образцы, пред-6 010956 ставляющие по меньшей мере 10 из общих классов и предпочтительно по меньшей мере 15 или 20 из указанных классов, могут определяться автоматически. В соответствии с системой классификации породы разделяются на следующие типы: плутонические вулканические породы: гранит, сиенит, гранодиорит, диорит, габбро; гипоабиссальные вулканические породы: долерит, диабаз; вытесняющие вулканические породы (вулканогены): риолит, трахит, андезит, дацит, базальт; осадочные породы (разделяются на две группы в зависимости от происхождения): обломочные породы: песчаник, конгломерат, брекчия, аркозовый песчаник, граувакка, кварцит, сланец(алеврит); необломочные, химические и биогенные породы: известняк, мел, доломит, черт; метаморфические породы: амфиболит, гнейс, гранулит, роговик, известковый/доломитовый мрамор, кварцит, серпентин, кристаллический сланец, сланец, милонит. Устройство и способ по изобретению предпочтительно обеспечивают классификацию любого данного объекта-образца в любом из вышеупомянутых классов, однако, в некоторых практических приложениях желательно обеспечить легкое определение набора основных классов, каждый из которых может включать в себя один или несколько из вышеупомянутых классов, образцы которых имеют подобные составные свойства, и которые, следовательно, не требуется различать для целей производства или строительства. Для спектрального анализа и сравнения с эталонными спектрами и значениями предпочтительны следующие два главных маршрута: использование статистических способов с применением статистических классификаторов и использование нейронных сетей. Нейронные сети состоят из связанной сети их основных элементов, так называемых нейронов. Нейрон получает информационный вектор, содержащий R различных значений, и умножает каждое значение пи на дискретный вес wi. Сумма этих произведений, т.е. скалярное произведение векторов р и w, плюс,возможно, смещение b, является входными данными для функции преобразования нейрона f, которая возвращает выходное значение а. Перед анализом реальных образцов сеть проходит "обучение", результатом этого обучения является набор откорректированных весов, для которых ожидается возврат правильного значения, т.е. классификационного индекса, при вводе входных значений для неизвестного образца. Авторы установили, что в способах по изобретению оптимальным является применение статистических способов с использованием вейвлетов. Вейвлеты имеют адекватные локальные свойства и оказываются оптимальными для статистического моделирования многомерных данных. В одном варианте осуществления используются вейвлеты Добеши с двумя нулевыми моментами. Точность классификации может быть повышена за счет нескольких измерений с различных позиций каждого опорного объектаобразца. Для таких усредненных измерений посредством вейвлетов может быть получено надежное предсказание вхождения в определенный класс. Источник видимого и инфракрасного освещения предпочтительно излучает видимый и инфракрасный свет, входящий в диапазон длин волны от примерно 340 до примерно 4000 нм, предпочтительно от примерно 340 до примерно 1200 нм, при этом для детектирования в указанном диапазоне выбирается соответствующий датчик. Специалист в данной области техники легко может выбрать соответствующие спектрофотометрические датчики, например спектрометры AvaSpec производства компании Avantse (Eerbeek, Нидерланды); эта же компания поставляет подходящие источники освещения, которые можно выбрать для получения света в требуемом диапазоне длин волн. Следует отметить, что новый аспект изобретения, имеющей отношение к спектроскопическому анализу, может быть реализован в отдельном варианте осуществления; в этом случае он представляет собой устройство, включающее в себя необходимые вышеописанные функции спектроскопического анализа объектов и описываемого автоматического петрографического анализа. Такое устройство в общем случае включает в себя соответствующий механизм подачи и конвейер, предпочтительно согласно описанию вышеупомянутых вариантов осуществления; источник освещения, создающий луч видимого и/или инфракрасного света; спектрофотометрический датчик, предназначенный для последовательного детектирования отражения указанного луча от освещаемого участка указанного объекта и измерения спектрального коэффициента поглощения или отражения в видимой и/или инфракрасной области, как описано выше; при этом устройство имеет систему управления, осуществляющую спектральный анализ и сравнения с эталонными спектрами/значениями, как описано ниже более подробно. Другой аспект изобретения включает в себя, как описано выше, компьютерный программный продукт, предназначенный для выполнения анализа данных, а также предпочтительно для управления сбором данных описываемыми способами и выполняющий автоматический анализ данных изображения согласно приводимому описанию с целью автоматического анализа объектов-образцов, как указано выше. Компьютерный программный продукт содержит командные средства, согласно командам которых после загрузки и запуска на компьютере процессор компьютера выполняет следующие действия: получение входных данных по меньшей мере от двух датчиков изображения, сконфигурированных соответствующим образом для фиксации последовательных изображений отражения плоского когерентного луча, падающего перпендикулярно направлению движения указанных объектов, транспортируемых-7 010956 с заданной скоростью, с минимальной заданной частотой; сохранение указанных изображений и обработка изображений для каждого объекта с целью получения данных, описывающих размеры указанного объекта, и данных о поверхности в трех измерениях или контурной карты и топографических данных, представляющих указанный объект; определение одного или нескольких параметров размеров и формы для указанных объектов на основе указанных полученных данных, при этом указанные параметры формы включают в себя параметр и/или классификацию формы, указывающую на удлиненность и/или уплощенность частицы, и параметр и/или классификацию округленности/шероховатости. В компьютерном программном продукте предпочтительно используются любые из вышеупомянутых описанных способов анализа и морфологических алгоритмов. В определенных вариантах осуществления компьютерный программный продукт может быть вынесен в явно разделенные модули, при этом один модуль выполняет сбор данных и управление аппаратурой измерения (калибровку скорости конвейера, датчиков и т.д.), а другой модуль, который может функционировать на отдельном компьютере, выполняет анализ данных и представление данных. В эффективном варианте осуществления компьютерный программный продукт далее обеспечивает ввод спектральных данных в видимой и/или инфракрасной области, полученных для каждого объекта как описано выше, и их анализ в соответствии с описанными способами с целью получения петрологической информации или другой информации о составе объектов, как описано выше. Указанная информация предпочтительно включает в себя классификацию указанного объекта согласно заданной системе классов петрологических типов и/или вариантов пород, как более подробно описано выше. Настоящее изобретение никоим образом не ограничивается определенным раскрытием спецификации и фигурами, и охватывает любые модификации в рамках прилагаемой формулы изобретения. Например, при спектроскопических измерениях можно использовать или иметь в наличии освещение с длинами волн, отличающимися от определенных в настоящем описании, а также различные линзы и датчики отражения; дополнительную камеру для получения дополнительной информации о свойствах текстуры поверхности и цвете; систему сортировки объектов после измерения и согласно результатам измерений; другие типы механизмов подачи и системы управления подачей частиц или объектов на конвейер и их извлечения с конвейера; несколько рядов исследуемых объектов. Кроме того, оборудование по изобретению может использоваться для измерения размеров, формы или состава других материалов, таких как руды, образцы или обломки, полученные путем высверливания, отолиты в рыбах, переработанный строительный материал; промышленные полезные ископаемые, декоративные камни, фрагменты кристаллов, металлические минералы и сплавы. Примеры Пример 1. Руководство к программе для раздела анализа размеров, формы и угловатости. Структура программы схематично показана на фиг. 2. В следующем разделе кратко описывается роль и функциональные возможности разделов исходной версии варианта осуществления программы. Калибровка камеры 1. Фиксируют один кадр. Для каждого столбца на изображении определяют самый яркий пиксель (теоретически соответствующий центру лазерной линии). Если интенсивность пикселя превышает "минимальную интенсивность" (используется для различения пикселей, относящиеся к лазерной линии, и пикселей, соответствующих уровням фонового света), то выполняют вызов "subVI алгоритма триангуляции" для вычисления высоты в этой точке. В результате создается одномерный массив значений высоты для данного кадра. В качестве высоты ленты берется срединное значение. Оно используется как опорное значение во всех последующих триангуляционных вычислениях. Использование срединного значения обусловлено тем, что большинство столбцов в кадре изображения должно быть охвачено лазерной линией. Таким образом, выбор срединного значения указывает на то, что не выбирается значение высоты, соответствующее закрытой линии. Кроме того, исключаются всплески из-за пыли и т.д. Калибровка камеры 2, процедура аналогична описанной выше для камеры 1."Машина состояний". Состояние 0: ответ на команду "стоп". Закрытие изображений, очистка памяти и т.д. Состояние 1 (исходное состояние): непрерывная съемка кадров с камеры 1 (параллельной с направлением движения). Вызов "subVI датчика частиц на основе окклюзий" для подсчета числа закрытых линий в каждом кадре. Если число закрытых линий превышает "предельный уровень окклюзий", то приближающаяся частица закрывает лазерную линию от камеры, система переходит в состояние 2. В любое время при нажатии клавиши "стоп" система переходит в состояние 0. Состояние 2 (получение данных): непрерывное получение кадров с обеих камер. Вызов "subVI калиброванной триангуляции" для генерации массивов данных о высотах. Вызов "subVI объединения линий" для объединения данных о высотах, сгенерированных каждой камерой. В программе используется двоичная защелка, указывающая момент запуска получения данных о поверхности твердых частиц в системе (т.е. момент, в который было получено возвращенное "subVI калиброванной триангуляции" значение высоты, превышающее минимальный порог высоты). Исходным состоянием этой защелки является "ложно", которое изменяется на "истинно" при возвращении положи-8 010956 тельного значения высоты. Критерий остановки 1: если защелка остается в состоянии "ложно" в течение прохождения числа линий, превышающего определенное число (элемент управления "максимальное число неактивных линий"), то частицы под лазером явно отсутствуют, и триггер должен иметь значение "ложно". В этом случае программа прекращает получение данных и возвращается в состояние 1. Критерий остановки 2: если защелка была переключена (т.е. была установлена в значение "истинно"), и с камеры не поступили какие-либо данные о положительной высоте, это указывает на достижение конца частицы. Однако такая ситуация может возникнуть и при наличии окклюзии в середине частицы,поэтому необходимо установить определенный допуск. Кроме того, каждый раз при фиксации пары кадров и выполнении этих условий происходит увеличение значения счетчика. Если с любой камеры впоследствии поступят данные о положительной высоты, счетчик обнуляется. Если счетчик превышает предопределенное значение ("предел счета"), система прекращает получение данных и переходит в состояние 3. Критерий остановки 3: при нажатии кнопки останова в любое время система немедленно переходит в состояние 0. Критерий остановки 4: в случае ошибки получения данных в любое время система прекращает получение данных и запрашивает требуемое действие у пользователя. Если в этом состоянии будет получено количество линий меньшее, чем значение "минимальное количество полученных линий" (пользовательский элемент управления), система перейдет обратно к состоянию 1 вместо состояния 3. Это означает, что частица слишком мала для обработки. Состояние 3 (обработка карты дальностей): в этом состоянии объединенная карта дальностей в формате массива используется в качестве входных данных, и выполняется вызов всех subVI (подпрограмм, называемых дополнительными виртуальными приборами - sub-Virtual instruments", подобно программной среде Labview производства National Instruments), необходимых для количественного определения свойств частицы. Здесь пользователь также может выбрать и просмотреть любой произвольный профиль высоты по разрезу частицы, что применяется при установке устройства и проведении диагностики. Руководство по инструментам subVI.subVI датчика частиц на основе окклюзий используется для обнаружения присутствия твердой частицы, приближающейся к лазерной линии. Этот инструмент функционирует путем анализа изображения лазерной линии (в формате массива), которое фиксируется камерой, установленной против направления движения. В каждом столбце на изображении определяется самый яркий пиксель. Если интенсивность самого яркого пикселя в данном столбце меньше "минимальной интенсивности" (определяемый пользователем порог), этот столбец считается закрытым. Таким образом, данный VI возвращает число закрытых столбцов для каждого кадра, отснятого камерой.subVI алгоритма триангуляции: этот программный компонент реализует алгоритм вычисления пространственных координат отдельной точки изображения. Входными данными является f (фокусное расстояние линзы камеры в мм), d (расстояние между центром линзы и лентой конвейера, измеренное по оси камеры, в мм),(угол триангуляции в градусах), j (координата пикселя в вертикальном направлении,по умолчанию измеряемая относительно верхнего левого угла изображения), i (координата пикселя в горизонтальном направлении, по умолчанию измеряемая относительно верхнего левого угла изображения), параметры датчика камеры (физические размеры в мм и в пикселях). Данный VI возвращает координаты у и z требуемой точки, координата х определяется положением ленты конвейера.subVI калиброванной триангуляции: этот инструмент обрабатывает отдельный кадр изображения (в формате массива) и определяет местонахождение центра лазерной линии в каждом столбце посредством методики "центра тяжести". Затем данный VI выполняет вызов "subVI алгоритма триангуляции" для каждого найденного пикового значения и возвращает ряд данных о высоте.subVI объединения линий: этот инструмент обрабатывает две линии данных высоты, сгенерированные инструментом "subVI калиброванной триангуляции" для каждой из двух камер, и объединяет их с целью получения однной линии данных высоты, перед выполнением этого VI одна из линий должна быть инвертирована (поскольку две камеры направлены в противоположные стороны); кроме того, конкретные элементы каждого линейного массива при совмещении линий должны соответствовать одному и тому же пространственному расположению. После этого выполняется объединение двух линий по точкам в соответствии со следующими критериями. Различаются ли значения высоты, возвращенные каждой камерой, более чем на величину "максимальной разницы" Если НЕТ: используется среднее из двух значений; Если ДА: какое-либо из значений = 0 Если ДА: точка закрыта от одной из камер. В качестве высоты в этой точке используется наибольшее из двух значений. Если НЕТ: вероятнее всего, разница появляется вследствие зеркальной засветки или промежуточного отражения, что приводит к ошибочно высокому значению. В качестве высоты в этой точке использу-9 010956 ется наименьшее из двух значений. Любые пиксели со значением высоты, не превышающим 10, устанавливаются в 0, что соответствует эталонному уровню высоты ленты.subVI проверки ширины: этот инструмент используется для дополнительного выравнивания и калибровки двух камер. Входными данными является линия данных высоты, сгенерированная "subVI калиброванной триангуляции". VI возвращает ширину частицы в пикселях и индекс самой дальней левой позиции частицы. Этот VI может применяться для обработки линии, возвращенной обеими камерами,для устранения различий.subVI удаления окклюзий с математической морфологией закрытия: этот VI выполняет устранение любых разрывов (отверстий) в пределах границы частицы, появляющихся из-за скрытия точки от обеих камер, с использованием морфологического закрытия по оттенкам серого. Структурирующий элемент проектируется с учетом условия минимизации воздействия на особенности оригинальной поверхности.subVI удаления выступов с математической морфологией открытия: этот VI выполняет устранение любых выступов (импульсного шума) на восстановленной поверхности, появляющихся в результате промежуточных отражений от впадин, с использованием морфологического открытия по оттенкам серого. Структурирующий элемент проектируется с учетом условия минимизации воздействия на особенности оригинальной поверхности. Автоматический subVI поиска минимального описывающего контура: этот VI предназначен для определения длины и ширины частицы. Полученная карта дальностей проходит пороговую обработку(приводится к двоичному виду, в котором одно значение представляет частицу, другое значение представляет фон). Ориентация частицы определяется с использованием стандартной визуальной функцииIMAQ, в основе которой лежит анализ моментов. После этого изображение частицы поворачивается для выравнивания ее основных осей относительно системы координат изображения. На изображение накладывается минимальный описывающий прямоугольник. Длинная сторона прямоугольника используется в качестве длины частицы, короткая сторона прямоугольника используется в качестве ширины частицы.subVI вычисления размера для "решета": этот VI вычисляет минимальный размер частицы для прохода через "решето" на основе ее расчетной ширины и высоты с использованием численного подхода. Кроме того, этот инструмент вычисляет объем частицы, который представляется в виде эквивалентного эллипсоида.subVI результатов сопоставления формы: этот VI выполняет преобразование числовых значений длины, ширины и высоты в формат, оптимальный для отображения.subVI повторной выборки изображения: этот инструмент снижает разрешение массива изображения с указанным коэффициентом уменьшения перед определением угловатости частицы.subVI элемента управления "катящийся шар": этот VI реализует структуру, в которой могут выполняться операции, необходимые для вычисления угловатости. Данный VI выполняет вызов "subVI адаптивного вычисления эллипсоида" для генерации эллипсоидального структурирующего элемента соответственно размерностям анализируемой частицы. Затем производится вызов "subVI алгоритма "катящийся шар" для выполнения морфологического открытия. После этого потеря объема частицы преобразуется в значение по шкале Пауэрса.subVI адаптивного вычисления эллипсоида: этот инструмент генерирует полуэллипсоидальный структурирующий элемент с основными осями, равными 1/6 осей частицы (после повторной выборки).subVI алгоритма "катящийся шар": этот инструмент выполняет морфологическое открытие для данного массива изображения с использованием данного структурирующего элемента.subVI распределения размера "решето": этот инструмент выполняет обновление совокупного распределения размеров частицы (представленного как дискретный массив с приращениями 0,5 мм) каждый раз при обработке частицы. Пример 2. Анализ угловатости твердых частиц. В общей сложности было обработано 200 твердых частиц размерами от 8 до 32 мм, которые были просканированы с использованием лазерной системы триангуляции и проанализированы по алгоритму эллипсоидальной морфологии. Перед анализом частицы оценивались геологами визуально и классифицировались вручную по шкале Пауэрса в двух независимых организациях. На фиг. 6 представлен график связи разброса мнимой потери объема, определенной путем морфологического открытия, с визуально (вручную) оцененной угловатостью для каждой частицы, представленной как число от 1 (достаточно угловатый) до 6 (достаточно округленный) в соответствии со шкалой Пауэрса. Первый обнаруженный факт состоит в том, что отклонение в результатах является очень большим и представляется растущим с повышением угловатости. Это можно подтвердить путем построения графика среднеквадратичного отклонения процентной потери объема для каждой категории в зависимости от числа Пауэрса, как показано на фиг. 7b. Можно отметить достаточно стабильное увеличение среднеквадратичного отклонения с ростом угловатости, что также показано на фиг. 7 а, на которой представлено распределение измеренной потери объема в пределах каждого класса. Из этого следует, что отклонения возникают вследствие трудностей при ручной и объективной классификации угловатости - достаточно- 10010956 округленная частица может быть идентифицирована сравнительно легко, тогда как установить разницу между большим количеством угловатых частиц намного более трудно. Для исследования эффективности алгоритма по изобретению были определены соотношения между средней процентной потерей объема и числом Пауэрса для каждой категории. Эти соотношения показаны на фиг. 8. Корреляция ясно прослеживается, существует почти линейная зависимость между средней процентной потерей объема и числом Пауэрса, оцененным вручную. Результирующее значение корреляции составляет 0,987. Пример 3. Петрографический анализ. Разработан способ получения данных о текстуре анализируемых образцов твердых частиц. Основное влияние на текстуру оказывают размеры отдельных кристаллов, поэтому текстура несет в себе важную информацию, которая может быть существенной для классификации, поскольку размер кристаллов твердых частиц может изменяться в зависимости от их типа. В общем случае способ функционирует следующим образом. Вначале определяется местонахождение образца в двумерном изображении, отснятом цифровой камерой (например, посредством промышленной камеры CCD- или CMOS-типа), расположенной над объектом (например, за блоком лазерного освещения и камеры, используемым для оценки угловатости),после чего выбирается его средняя часть для устранения влияния фона и теней. Затем изображение преобразуется в полутоновое изображение, и число оттенков серого сокращается до диапазона от 2 до 25. Были проведены эксперименты с различными количествами цветов, и интервал 2-25 позволил получить хорошие результаты; наилучшие результаты, по-видимому, были получены в интервале 4-8. После сокращения цветов выполняется оценка каждого пикселя и создается так называемая матрица совместной встречаемости, которая содержит информацию о вероятности совпадения цветов двух соседних пикселей. Эмпирически можно отметить, что в случае, если твердая частица содержит большие кристаллы, совпадение цветов соседних пикселей более вероятно, и наоборот. Каждый элемент pij в матрице совместной встречаемости Р представляет количество случаев, в которых пиксель полутонового значения i находится на предопределенном расстоянии d от пикселя со значением j, при этом d обычно является вектором, указывающим на следующий пиксель справа, или может представлять собой набор векторов, что позволяет оценивать все окружающие пиксели. Диагональные элементы Р, т.е. все элементы pij, где i = j, представляют количество случаев, в которых сравниваемые пиксели имеют одинаковый цвет. Следовательно, в образцах с большими кристаллами наибольшие значения в пределах Р расположены на диагоналях или близко к ним, в то время как для образцов с небольшими кристаллами значения более равномерно распределены по матрице. Для получения данных о текстуре после построения матрицы совместной встречаемости Р были применены следующие уравнения, в большей или меньшей степени путем оценки распределения значений в пределах Р В дополнение к описанному выше фотографированию, проанализированные в примере образцы были дополнительно исследованы спектроскопическим методом. Эти образцы относились к четырем различным типам твердых частиц, два из которых были разделены на две разновидности. Типы твердых частиц были следующими: базальт, габбро, риолит, гранитом. Образцы базальта и гранита были далее разделены на две категории или вариации. Таким образом, образцы представляли шесть различных образцов твердых частиц, каждый из них содержал десять частичных образцов (см. таблицу). Образцы исследовались в двух различных областях спектра: в области или диапазоне 400-1100 нм, в данном случае называемом видимым диапазоном (Visible Range, VIS), в диапазоне 1000-3000 нм, в данном случае называемом ближним инфракрасным диапазоном (Near-Infrared Range, NIR), и в среднем инфракрасном диапазоне (Mid-Infrared Range, MIR), т.е. 3000-30000 нм. Каждый частичный образец был измерен в одной области в VIS и в трех областях в MIR и NIR. В общей сложности было произведено 60 измерений в VIS и 180 в MIR и NIR соответственно.- 11010956 Результаты Видимая область (VIS). Спектр образцов в видимой области (в данном случае 400-1100 нм) весьма однороден, с довольно постоянным наклоном и небольшим количеством "впадин" и "выступов"; тем не менее, классификация оказалась довольно точной. С учетом ограниченного числа измерений, равного 60, полученная точность около 80% явно превышает ожидаемую. Кроме того, при большем количестве измерений качество классификации должно заметно расти. Общим обстоятельством в классификации по всем спектрам (VIS, NIR и MIR) стало то, что ошибки наиболее часто возникали при классификации образцов с классом или номером 4 и 5. В этих случаях образцы класса 4 были почти без исключения отнесены к классу 5 и наоборот. Ввиду этого обстоятельства и того факта, что образцы класса 4 и 5 в большинстве случаев были расценены как имеющие одинаковый тип агрегата (при этом относящиеся к одному типу твердых частиц),была выполнена классификация, в рамках которой два класса были приняты за один. При этом значительно повысилась точность классификации (до 98%), более реальная точность, вероятнее всего, составит от 90 до 95%. Таблица Ближняя инфракрасная область (NIR). Спектр в ближней инфракрасной области достаточно однороден, но имеет более очевидные особенности, которые можно использовать для различения классов путем рассмотрения спектра. В общем случае можно достаточно легко достичь точности классификации 95-98%, ошибки происходят только в отношении классов 4 и 5. После их преобразования в один класс точность составляет 100% без исключений. Пример 4. Автоматический анализ и представление данных. Для представления данных, собранных при высокоэффективном анализе тведых частиц посредством устройства на фиг. 2, была создана дружественная программа и компьютерный интерфейс. На снимках экрана представлены примеры выходных данных компьютерной программы, представленной на фиг. 9.(i) Определение размера. Программа определяет главные оси каждого объекта на основе отснятого изображения; здесь длинная ось (L) является наибольшим расстоянием между двумя точками объекта, средняя ось (I) является самой длинной осью, ортогональной к главной оси, короткая ось (S) является ортогональной к другим двум осям. Размер каждой частицы обозначается параметром объема, т.е. расчетным объемом эллипсоида с внешними размерами, соответствующими главным осям. Такое описание будет в основном соответствовать правилам измерения размеров, определенным в Европейском стандарте В 933-1.(ii) Классификация формы. Каждый объект в зависимости от соотношений между осями относится к одной из четырех групп: удлиненный, уплощенный, уплощенный и удлиненный, уплощенный и кубический. Если отношения S/I ("коэффициент лещадности") и I/L ("коэффициент удлинения") превышают 0,67, объект является кубическим; если I/L0,67 и S/I0,67, объект является уплощенным; если I/L0,67 иS/I0,67, объект является удлиненным; если I/L0,67 и S/I0,67, объект является удлиненноуплощенным. Следует отметить, что могут использоваться и другие предельные значения, например 0,5. Каждый объект относится к соответствующему классу, и выполняется вычисление суммарного рас- 12010956 пределения частиц по различным классам на основе числа частиц и полного суммарного объема частиц. Полученное определение может быть непосредственно связано с индексом формы и индексом лещадности согласно Европейским стандартам В 933:4 и В 933:3 соответственно; другими словами, полученные данные дают эквивалентную информацию, соответствующую измерениям посредством кронциркуля и решета, описанным в этих стандартах.(iii) Классификация угловатости. Угловатость ("процентный объем углов") вычисляется для каждой частицы на основе морфологического анализа полученного трехмерного изображения, как описано выше. Каждая частица относится к соответствующему классу из шести: (1) достаточно округленный, (2) округленный, (3) несколько кругленный, (4) несколько угловатый, (5) угловатый, (6) достаточно угловатый. Классификация линейно коррелирует с расчетным "процентным объемом углов" Выполняется вычисление суммарного распределения частиц по различным классам на основе числа частиц и полного суммарного объема частиц. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство для автоматического анализа размеров и формы набора объектов-образцов, отобранных из множества минералов, фрагментов породы, гравия, естественных, изготовленных или переработанных композитов и т.д., включающее в себя следующие компоненты:a) модуль подачи, предназначенный для помещения указанных объектов с определенным разнесением в одном потоке на ленту конвейера;b) источник освещения, предназначенный для создания коллимированного пучка света, направляемого перпендикулярно на указанную ленту конвейера;c) средство фиксации изображения, включающее в себя по меньшей мере один датчик изображения,предназначенный для съемки изображения отражения указанного плоского луча, освещающего указанный объект,причем устройство также включает в себя систему управления, содержащую систему обработки,включающую в себя компьютерную программу и память и предназначенную для управления механическими и аппаратными компонентами оборудования и для хранения зафиксированных изображений, причем система управления выполнена с возможностью обработки последовательности изображений указанного объекта с целью автоматического определения размеров и формы указанных объектов и вычисляет параметры, представляющие размеры и форму объектов, причем указанные параметры формы включают в себя параметры, описывающие форму и угловатость. 2. Устройство по п.1, отличающееся тем, что указанное средство фиксации изображения включает в себя по меньшей мере два датчика изображения, предназначенные для фиксации изображения указанного отражения плоского луча, направленного на объект под различными углами по отношению к плоскому лучу. 3. Устройство по п.1, отличающееся тем, что механизм подачи выбирается из следующих механизмов подачи: вибрационный спиральный элеватор, механизм подачи с дозатором. 4. Устройство по п.2, отличающееся тем, что на каждой стороне указанного плоского луча размещается по меньшей мере по одному из двух датчиков изображения таким образом, что горизонтальная ось каждой из плоскостей изображения ориентируется перпендикулярно к направлению движения ленты конвейера параллельно с плоским лучом. 5. Устройство по п.1, отличающееся тем, что оно предназначается для автоматического анализа по меньшей мере около 100 указанных объектов-образцов наибольшим диаметром менее 100 мм/ч, и предпочтительно по меньшей мере около 400 указанных объектов-образцов наибольшим диаметром менее 100 мм/ч. 6. Устройство по п.1, отличающееся тем, что система управления выполнена с возможностью обработки последовательности изображений и получающегося трехмерного изображения поверхности указанного объекта посредством компьютерной программы и вычисления одного или нескольких из следующих параметров: размеры объектов; величины длинных, средних и коротких осей; коэффициент удлинения и коэффициент лещадности; класс формы; эквивалентный индекс формы; эквивалентный индекс лещадности; сферичность; значение округлости или угловатости; статистическое распределение одного или нескольких из указанных параметров для множества анализируемых частиц. 7. Устройство по п.6, отличающееся тем, что система управления выполнена с возможностью определения параметра размеров для указанных объектов и распределения размеров, класса формы и распределения классов форм, класса угловатости и распределения угловатости. 8. Устройство по любому из пп.1-7, отличающееся тем, что параметры формы дополнительно включают в себя параметр текстуры поверхности, определяющий гладкость/шероховатость. 9. Устройство по любому из пп.1-8, отличающееся тем, что система управления выполнена с возможностью обработки последовательности изображений посредством морфологического алгоритма с целью вычисления значения мнимой потери объема, связанного с параметром округлости или угловато- 13010956 сти и/или классом. 10. Устройство по п.9, отличающееся тем, что морфологический алгоритм основан на использовании структурного эллипсоидального элемента, причем указанный элемент определяется для каждой анализируемой частицы, имеющей коэффициенты пропорциональности, близкие к коэффициентам пропорциональности указанной частицы. 11. Устройство по п.10, отличающееся тем, что константа пропорциональности, которая определяет отношение между размером указанной частицы и размером указанного структурного элемента, находится в диапазоне примерно от 1:3 до 1:10, предпочтительно в диапазоне от примерно 1:4 до примерно 1:10. 12. Устройство по п.1, отличающееся тем, что дополнительно включает в себя источник освещения,создающий луч видимого и/или инфракрасного света; спектрофотометрический датчик, предназначенный для детектирования отражения указанного луча от освещаемого участка указанного объекта и измерения спектра поглощения или отражения в видимом и/или инфракрасном диапазоне, и система управления выполнена с возможностью обработки указанного спектра и его сравнения с опорными спектрами и/или спектральными значениями в эталонных материалах с целью классификации указанного объекта согласно предопределенной системе классов типов и/или вариантов минералов и частиц пород и подобных объектов. 13. Устройство по п.12, отличающееся тем, что источник видимого и инфракрасного освещения излучает видимый и инфракрасный свет, имеющий диапазон длин волн от примерно 340 до примерно 1200 нм, причем указанный диапазон детектируется датчиком. 14. Устройство по любому из пп.1-13, отличающееся тем, что дополнительно включает в себя средства взвешивания для взвешивания каждого объекта. 15. Способ определения размеров и формы объектов в наборе объектов в образце, отбираемом из минералов, фрагментов породы, гравия, естественных, изготовленных или переработанных агрегатов и т.д., причем определение формы включает в себя, по меньшей мере, определение параметра или класса формы, устанавливающего удлиненность и/или уплощеность частицы, и определение угловатости, причем указанный способ включает в себя следующие шаги: размещение указанных объектов с некоторыми интервалами на движущейся ленте конвейера; освещение последовательного потока объектов коллимированным пучком света, ориентированным перпендикулярно направлению движения конвейера; фиксирование посредством по меньшей мере одного датчика изображения изображений диффузного отражения указанного плоского луча, освещающего указанный объект, и сохранение указанных изображений в памяти таким образом, что для каждого объекта создается и сохраняется набор изображений с постоянной минимальной частотой, зависящей от заданной скорости конвейера; обработка набора изображений для каждого объекта, прошедшего под плоским пучком света, для получения данных о поверхности в трех измерениях, или контурной карты и топографических данных,описывающих указанный объект; определение параметра размеров и параметров формы на основе указанных полученных данных для указанных объектов,причем указанные параметры формы включают в себя параметр и/или классификацию формы, указывающий на удлиненность и/или уплощеность частицы, а также параметр и/или классификацию угловатости. 16. Способ по п.15, отличающийся тем, что включает в себя фиксацию изображений с использованием по меньшей мере двух датчиков изображения, расположенных по одному на каждой стороне указанного коллимированного пучка света. 17. Способ по п.15, отличающийся тем, что включает в себя сбор данных о размерах и форме, в том числе данных о форме, определяющих удлинение и уплощенность, и данные угловатости/округлости для каждого объекта в указанном наборе объектов, а также вычисление параметров, представляющих средние и изменяющиеся значения размеров и формы анализируемых объектов в указанном образце. 18. Способ по п.17, отличающийся тем, что размеры объекта представляют эллипсом, вычисляемым по короткой и средней осям указанного объекта. 19. Способ по п.17, отличающийся тем, что размеры объектов обозначают расчетным объемом на основе измерений размерностей и предопределенной формы. 20. Способ по п.19, отличающийся тем, что выполняют вычисление эллипсоида по трем осям, представляющим внешние размеры объекта, причем указанный эллипсоид представляет собой аппроксимацию объема объекта, используемую для генерации распределения размеров для множества анализируемых объектов. 21. Способ по любому из пп.15-20, отличающийся тем, что параметр и/или классификация формы включает в себя классификацию формы, по меньшей мере, по следующим четырем классам: в основном сферические объекты, в основном плоские объекты, в основном удлиненные объекты, в основном удлиненные и уплощенные объекты. 22. Способ по любому из пп.15-21, отличающийся тем, что в алгоритме математической морфологии при определении угловатости объекта используют эллипсоидальный структурирующий элемент с- 14010956 осями, пропорциональными осям объекта. 23. Способ по п.22, отличающийся тем, что константа пропорциональности, определяющая отношение между размером указанной частицы и размером указанного структурирующего элемента лежит в диапазоне примерно от 1:3 до 1:10, предпочтительно в диапазоне от примерно 1:4 до примерно 1:10. 24. Способ по п.23, отличающийся тем, что константа пропорциональности лежит в диапазоне примерно от 1:4 примерно до 1:8. 25. Способ по любому из пп.15-24, отличающийся тем, что параметр и/или классификация угловатости включает в себя схему классификации с множеством классов. 26. Способ по любому из пп.15-25, дополнительно включающий в себя освещение каждого объекта,помещенного на конвейер, лучом видимого и/или инфракрасного света, детектирование отражения указанного луча от освещенного участка указанного объекта и измерение спектрального коэффициента поглощения или отражения в видимой и/или инфракрасной области, сравнение указанного спектра с эталонными спектральными значениями с целью определения петрологических или других данных о составе указанного объекта. 27. Способ по п.26, отличающийся тем, что петрологические данные включают в себя классификацию указанного объекта согласно предопределенной системе классов и/или вариантов петрологических типов твердых частиц. 28. Компьютерный программный продукт, загружаемый на компьютере и предназначенный для управления получением данных изображения набора объектов, отобранных из минералов, фрагментов породы, гравия, а также естественных, изготовленных или переработанных агрегатов и т.д., и анализа этих данных, причем указанный компьютерный программный продукт содержит командные средства,согласно командам которых после загрузки и запуска на компьютере процессор компьютера выполняет следующие действия: получение входных данных по меньшей мере от двух датчиков изображения, сконфигурированных соответствующим образом для фиксации последовательных изображений отражения плоского когерентного луча, падающего перпендикулярно направлению движения потока указанных объектов, транспортируемых с заданной скоростью, с минимальной заданной частотой; сохранение указанных изображений и обработка изображений для каждого объекта с целью получения данных, описывающих размеры указанного объекта, и данных о поверхности в трех измерениях,или контурной карты и топографических данных, представляющих указанный объект; определение одного или нескольких параметров размеров и формы для указанных объектов на основе указанных полученных данных, при этом указанные параметры формы включают в себя параметр и/или классификацию формы, указывающую на удлиненность и/или уплощенность частицы, и параметр и/или классификацию округленности/шероховатости. 29. Компьютерный программный продукт по п.28, дополнительно включающий в себя программные средства, реализующие сбор данных о размерах и форме, в том числе данных о форме, указывающую на удлиненность и уплощенность, а также данные об угловатости/округлости для каждого объекта в указанном наборе объектов, и вычисление параметров, представляющих значения средних и динамически изменяющихся размеров и формы в указанном наборе объектов. 30. Компьютерный программный продукт по п.28 или 29, отличающийся тем, что параметр формы и/или классификация включают классификацию формы, по меньшей мере, по следующим четырем классам: в основном сферические объекты, в основном плоские объекты, в основном удлиненные объекты, в основном удлиненные и уплощенные объекты. 31. Компьютерный программный продукт по любому из пп.28-30, отличающийся тем, что размер объектов обозначается расчетным объемом на основе измеренных размерностей и предопределенной формы. 32. Компьютерный программный продукт по п.31, отличающийся тем, что выполняется вычисление эллипсоида по трем осям, которые представляют внешние размеры объекта, причем указанный эллипсоид представляет собой аппроксимацию объема объекта, используемую при генерации распределения размеров для множества анализируемых объектов. 33. Компьютерный программный продукт по любому из пп.28-32, отличающийся тем, что в алгоритме математической морфологии при определении угловатости объекта используется эллипсоидальный структурирующий элемент с осями, пропорциональными осям объекта. 34. Компьютерный программный продукт по п.33, отличающийся тем, что константа пропорциональности, определяющая отношение между размером указанной частицы и размером указанного структурирующего элемента, лежит в диапазоне примерно от 1:3 до 1:10, предпочтительно в диапазоне от примерно 1:4 до примерно 1:10. 35. Компьютерный программный продукт по п.34, отличающийся тем, что константа пропорциональности лежит в диапазоне примерно от 1:4 примерно до 1:8. 36. Компьютерный программный продукт по любому из пп.28-35, далее выполняющий следующие шаги: получение спектрофотометрических входных данных от спектрометра, сконфигурированного для- 15010956 детектирования отражений луча видимого и/или инфракрасного света, направленного на указанный объект; сравнение указанных данных с эталонными спектральными значениями для определения петрологических или других данных о составе указанного объекта. 37. Компьютерный программный продукт по п.36, отличающийся тем, что указанные петрологические данные включают в себя классификацию указанного объекта согласно предопределенной системе классов петрологических типов и/или вариантов фрагментов пород.
МПК / Метки
МПК: G01B 11/30, G01N 33/24
Метки: также, состава, частиц, анализа, размера, устройство, формы, пород, способ, угловатости, горных, минералов
Код ссылки
<a href="https://eas.patents.su/22-10956-ustrojjstvo-i-sposob-analiza-razmera-formy-i-uglovatosti-a-takzhe-sostava-mineralov-i-chastic-gornyh-porod.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство и способ анализа размера, формы и угловатости, а также состава минералов и частиц горных пород</a>
Устройство и способ для измерения удельного сопротивления горных пород
Номер патента: 9838
Опубликовано: 28.04.2008
Авторы: Руэтер Хорст, Страк Курт Мартин
МПК: G01V 3/24
Метки: удельного, сопротивления, горных, устройство, способ, пород, измерения
Формула / Реферат:
1. Устройство для измерения удельного сопротивления горных пород через проводящую трубу в скважине, содержащее зонд, выполненный с возможностью перемещения в скважине; группу потенциальных измерительных электродов, расположенных на зонде на расстоянии друг от друга и выполненных с возможностью создания электрического контакта с указанной трубой; по меньшей мере один токовый питающий электрод, расположенный на зонде и выполненный с возможностью...
Устройство для термомеханического разрушения горных пород
Номер патента: 8660
Опубликовано: 29.06.2007
Авторы: Сарымсаков Жыргалбек Омуралиевич, Турсунов Талгат Бекузакович, Генбач Александр Алексеевич
МПК: E21B 7/14
Метки: горных, устройство, разрушения, пород, термомеханического
Формула / Реферат:
Устройство для термомеханического разрушения горных пород воздействием на разрушаемую их поверхность раскаленным высокоскоростным закрученным двухфазным потоком, содержащее приспособление для подачи в струю сыпучего абразивного материала; буровую штангу с закрепленными на ее конце коронкой и шламовой трубой, выступающей относительно кожуха на расстояние не менее 0,7 его радиуса, образуя между кожухом термоинструмента и коническим диском...
Способ переработки горных пород
Номер патента: 2592
Опубликовано: 27.06.2002
Авторы: Рототаев Дмитрий Александрович, Елькин Александр Иосифович, Попов Валерий Тимофеевич
МПК: B02C 23/00, C22B 1/00
Метки: переработки, пород, способ, горных
Формула / Реферат:
1. Способ переработки горных пород, включающий разрушение и измельчение горной породы в газовой среде, содержащей углеводороды, отличающийся тем, что габаритную породу загружают в замкнутую емкость, в которую под давлением через входное отверстие подают газовую среду до полного заполнения объема емкости, затем емкость нагревают до заданной температуры, выдерживают интервал времени, необходимый для завершения процесса высокотемпературного...
Способ и система (варианты) для оценки толщи горных пород
Номер патента: 9638
Опубликовано: 28.02.2008
Автор: Ван Дапен
МПК: G01V 1/28
Метки: варианты, оценки, способ, пород, горных, система, толщи
Формула / Реферат:
1. Способ оценки толщи горных пород, заключающийся в том, что: (а) по меньшей мере в одном пункте возбуждения приводят в действие источник сейсмических сигналов и генерируют сейсмические волны, распространяющиеся внутрь оцениваемой толщи, (б) по меньшей мере в одном пункте приема получают три компоненты сейсмических данных, (в) проводят векторную обработку трех компонент сейсмических данных, используя времена пробега волн по меньшей мере от...
Способ определения возраста осадочных горных пород
Номер патента: 10117
Опубликовано: 30.06.2008
Авторы: Неевина Татьяна Александровна, Каныгина Ольга Николаевна, Неевина Любовь Ивановна
МПК: G01V 9/00
Метки: горных, осадочных, способ, пород, определения, возраста
Формула / Реферат:
1. Способ определения возраста осадочных горных пород, включающий отбор фораминифер, выделение участка исследования, его фиксирование, определение возраста осадочной горной породы по стратиграфическим шкалам, отличающийся тем, что в качестве выделенного участка на фораминифере выбирают стенку раковины, а определение возраста осадочной горной породы производят по коэффициенту фрактальной размерности. 2. Способ по п.1, отличающийся тем, что...
Предыдущий патент: Способ и система для определения положения бурового долота
Следующий патент: Предварительно оплаченная платежная карточка, которая может немедленно дистанционно пополняться с помощью купона
Случайный патент: Контейнер для сбора биологических выделений, дренирования скопления отделяемого, очищения стом или подобного применения