Гравитационный градиентометр
Номер патента: 12274
Опубликовано: 28.08.2009
Авторы: Винтерфлад Джон, Манн Энтони Гордон, Ван Канн Фрэнк Йоахим
Формула / Реферат
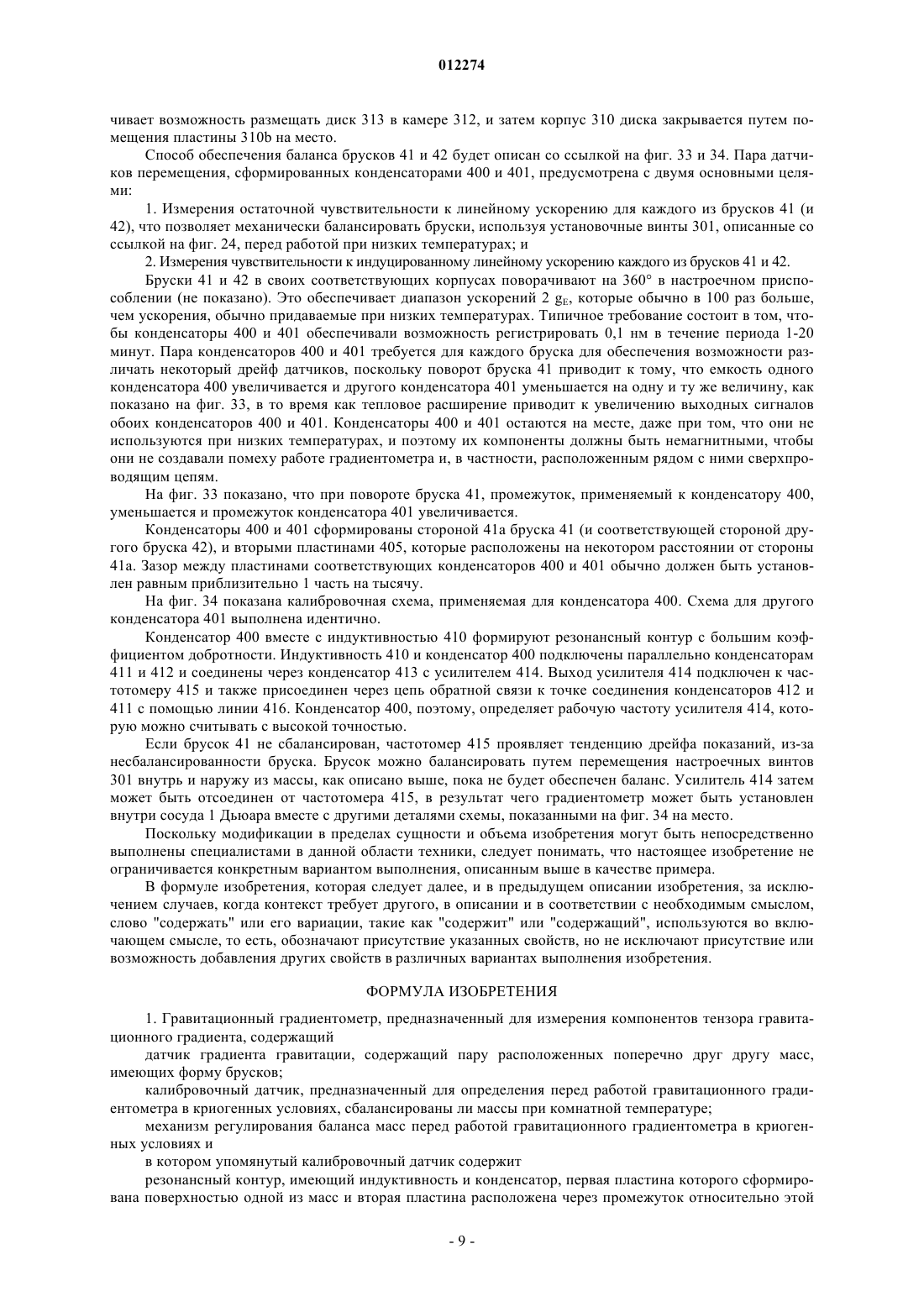
1. Гравитационный градиентометр, предназначенный для измерения компонентов тензора гравитационного градиента, содержащий
датчик градиента гравитации, содержащий пару расположенных поперечно друг другу масс, имеющих форму брусков;
калибровочный датчик, предназначенный для определения перед работой гравитационного градиентометра в криогенных условиях, сбалансированы ли массы при комнатной температуре;
механизм регулирования баланса масс перед работой гравитационного градиентометра в криогенных условиях и
в котором упомянутый калибровочный датчик содержит
резонансный контур, имеющий индуктивность и конденсатор, первая пластина которого сформирована поверхностью одной из масс и вторая пластина расположена через промежуток относительно этой поверхности одной из масс, и
генератор, предназначенный для приема сигнала из резонансного контура и для формирования выходного сигнала, обозначающего баланс масс.
2. Гравитационный градиентометр по п.1, в котором каждая масса, имеющая форму бруска, содержит резонансный контур, связанный с каждым концом каждой массы так, что, когда масса поворачивается, она поворачивается вокруг оси вращения, зазор между первой пластиной и второй пластиной резонансного контура увеличивается и зазор между первой пластиной и второй пластиной другого резонансного контура уменьшается.
3. Гравитационный градиентометр по п.1, в котором генератор представляет собой усилитель.
4. Гравитационный градиентометр по п.3, в котором усилитель сформирован на основе отдельного полевого транзистора.
5. Гравитационный градиентометр по п.3, в котором выходной сигнал усилителя преобразуется в цифровую форму с помощью частотомера.
6. Гравитационный градиентометр по п.1, в котором резонансный контур соединен с генератором с использованием множества конденсаторов.
7. Гравитационный градиентометр по п.1, в котором механизм регулирования содержит множество винтовых элементов, передвигаемых внутри масс для балансирования масс.
8. Гравитационный градиентометр по п.1, в котором массы, имеющие форму брусков, установлены в корпусе и соединены с корпусом гибкой перемычкой, причем корпус имеет периферийную стенку, винтовые элементы расположены в каналах, выполненных в массах, и в периферийной стенке выполнены отверстия, совмещаемые с каналами в массах так, чтобы через отверстия можно было установить инструмент в канал в массе для регулирования положения винтовых элементов в массах для балансировки масс.

Текст
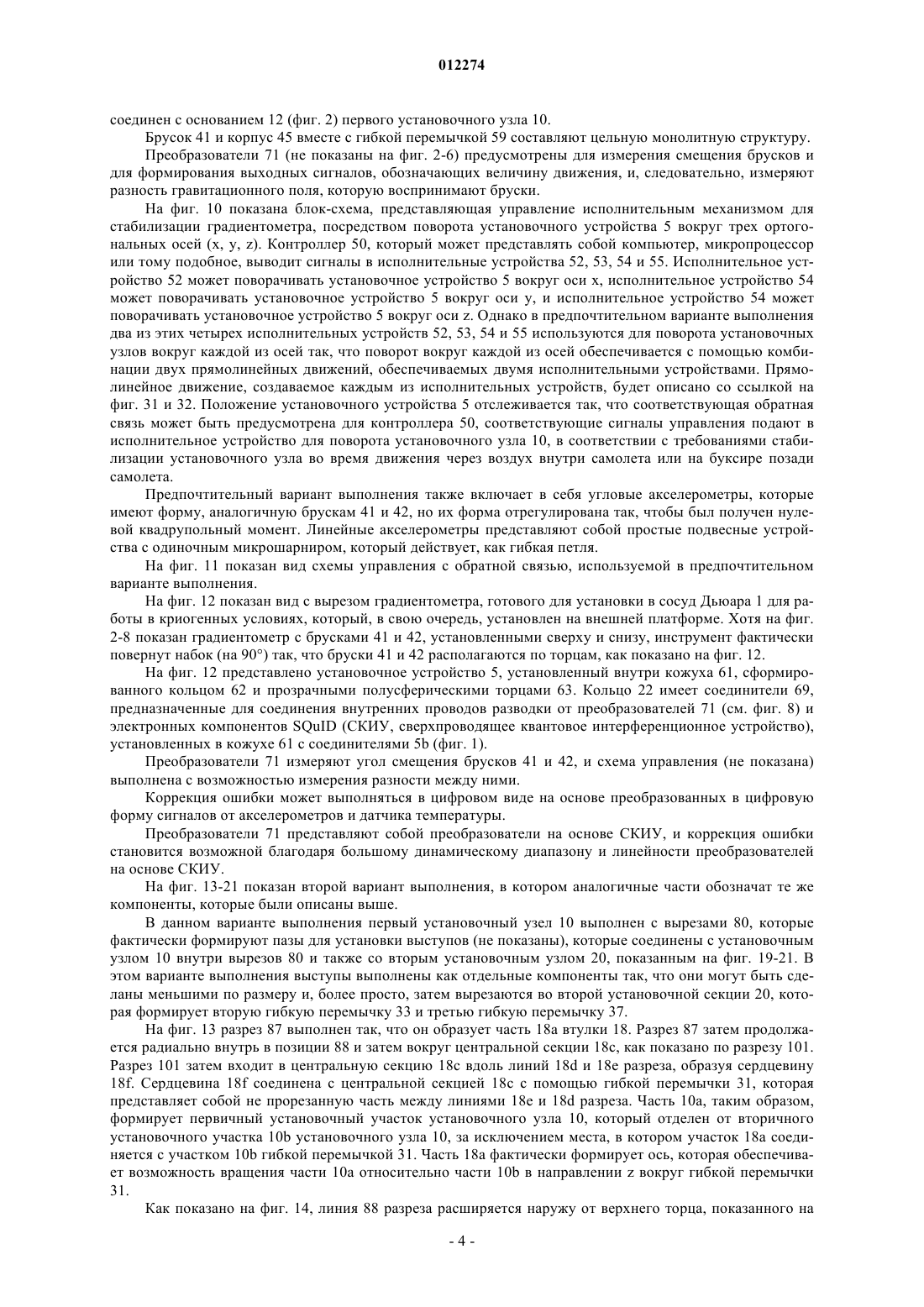
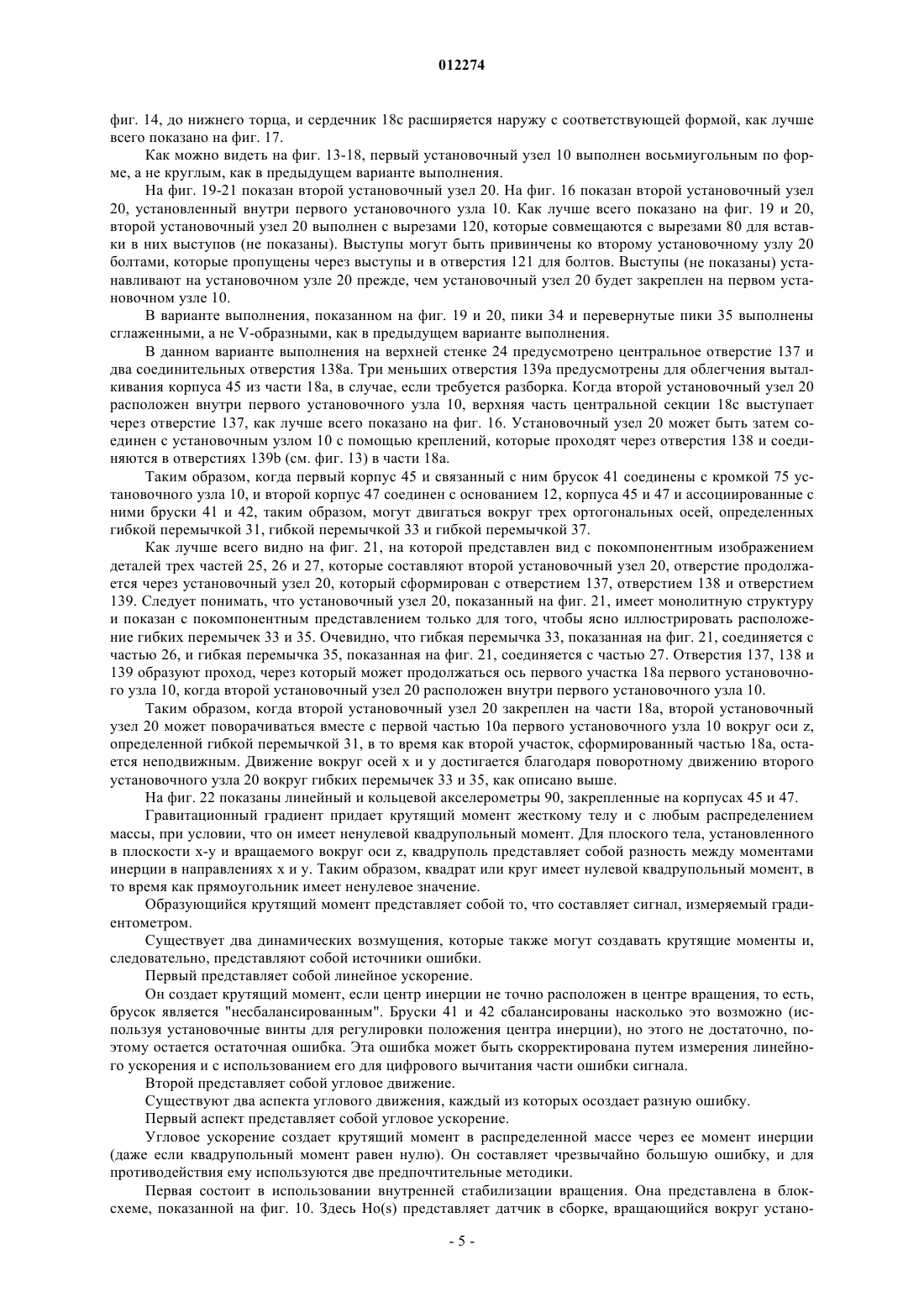
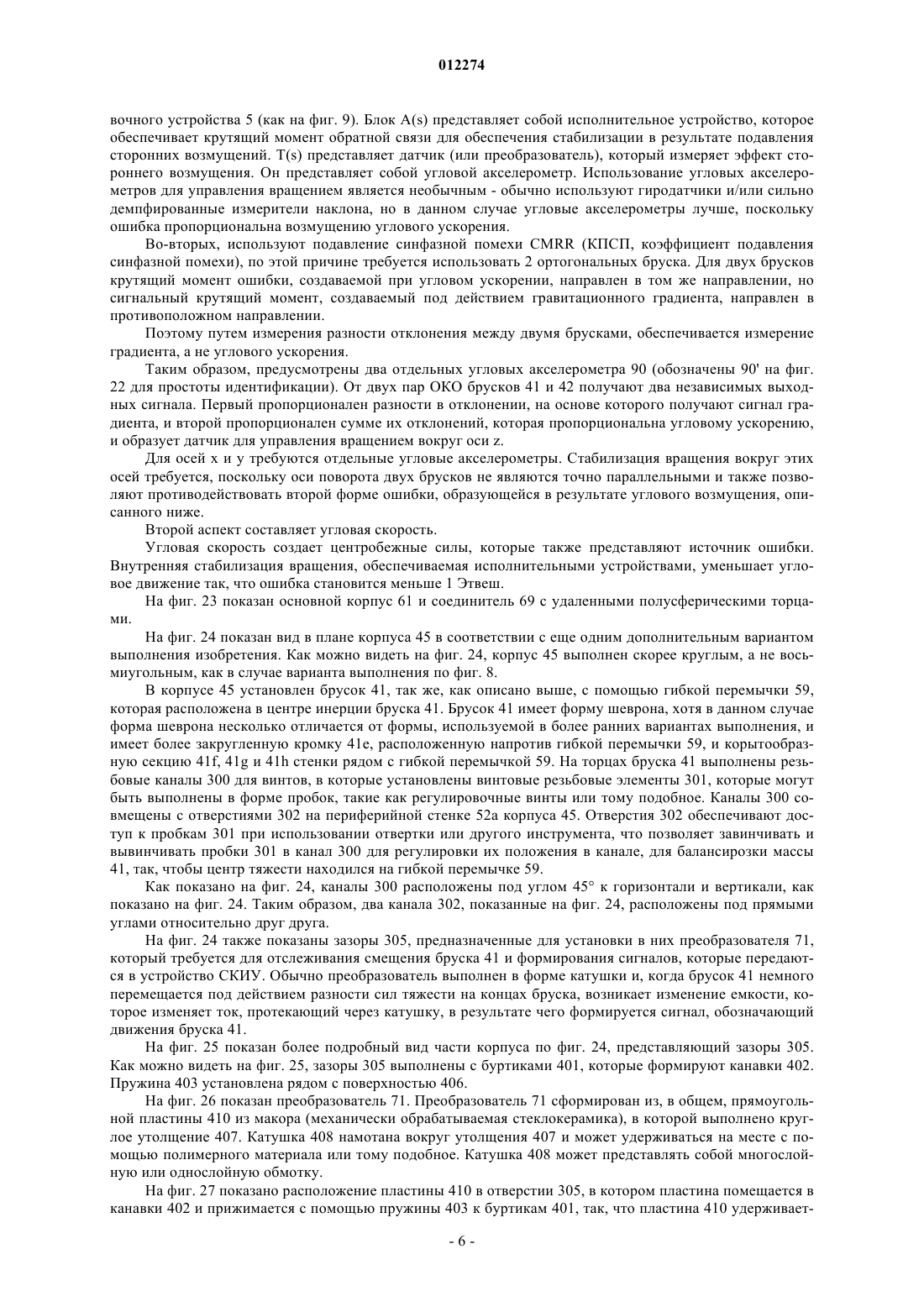
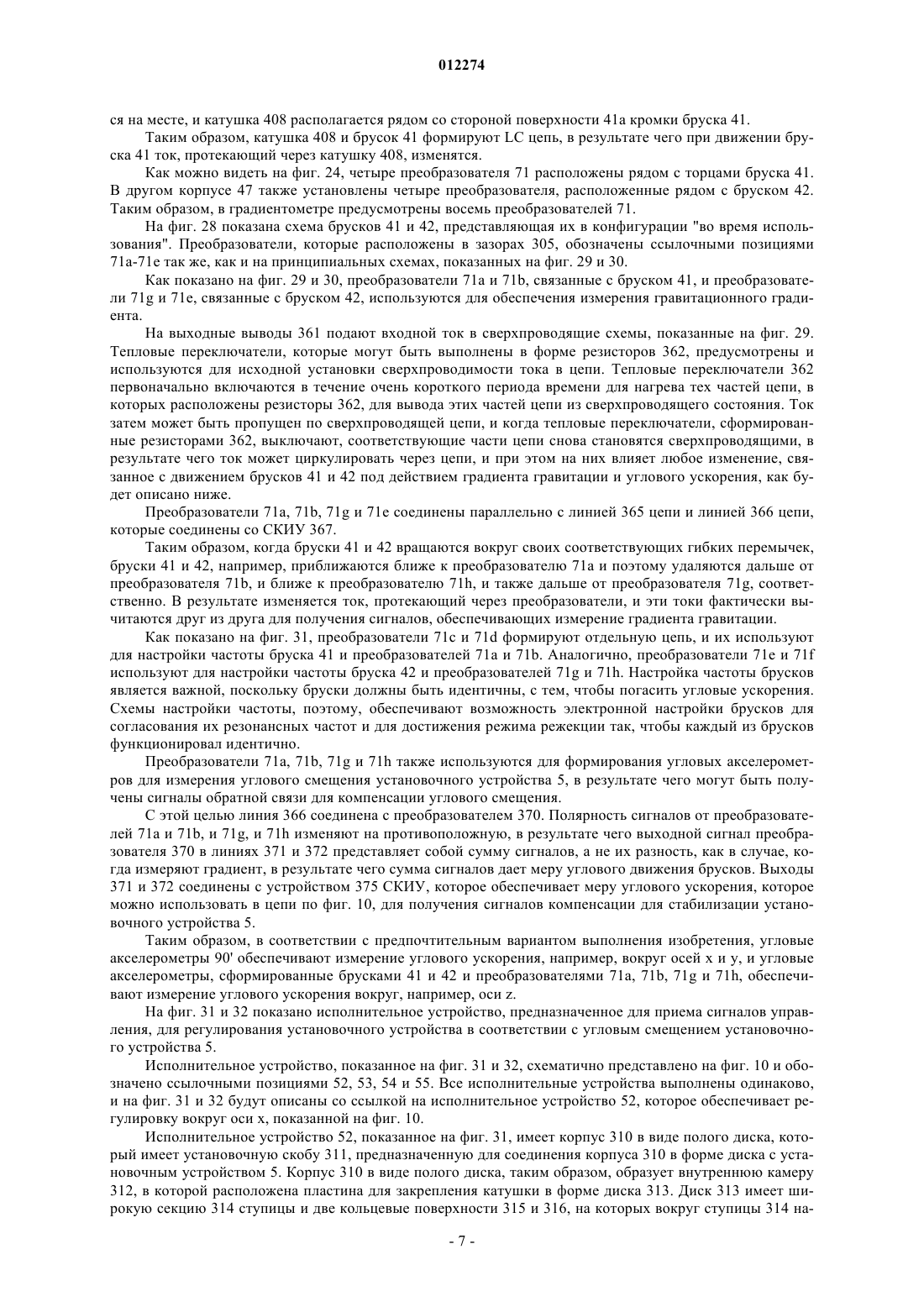
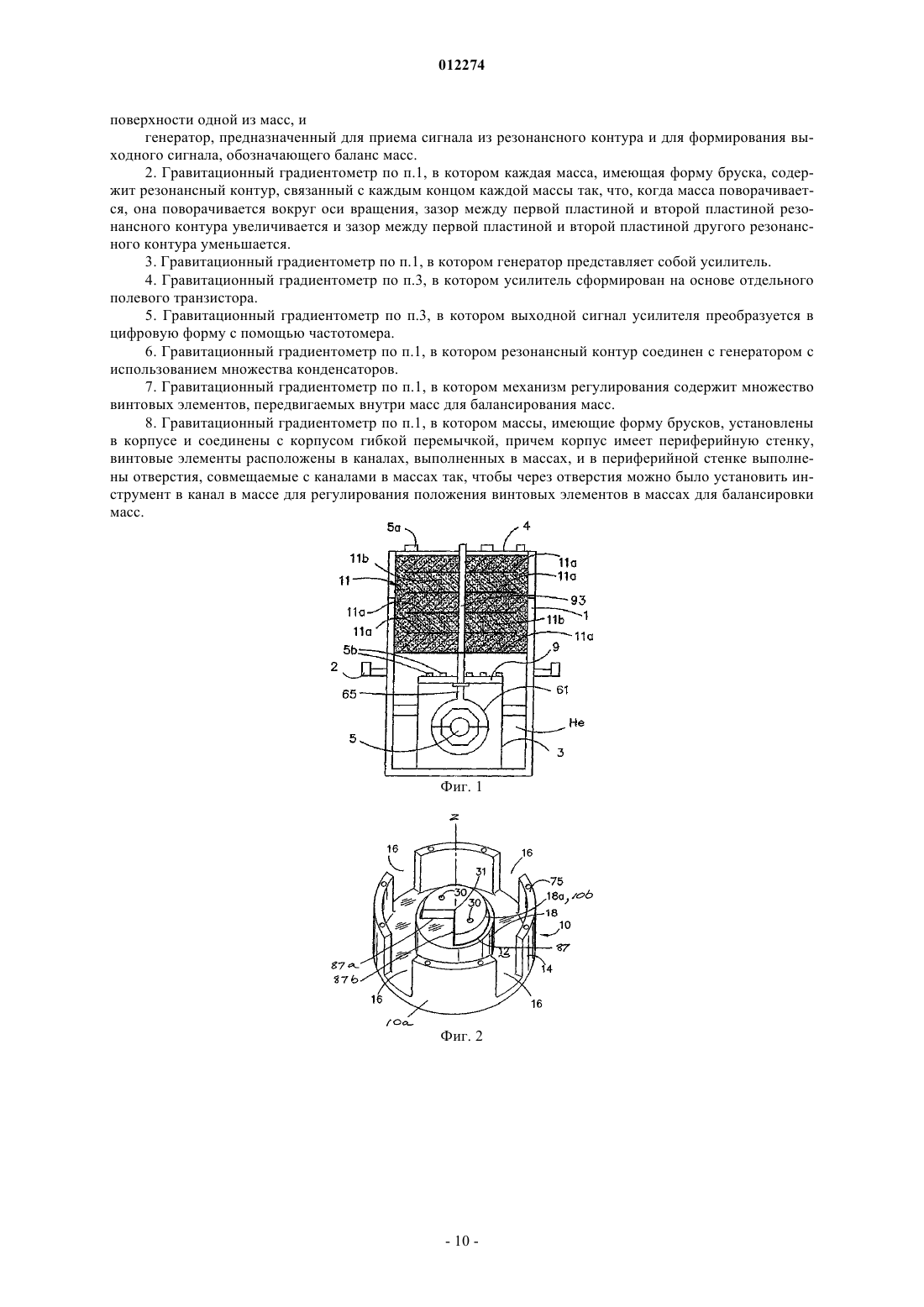
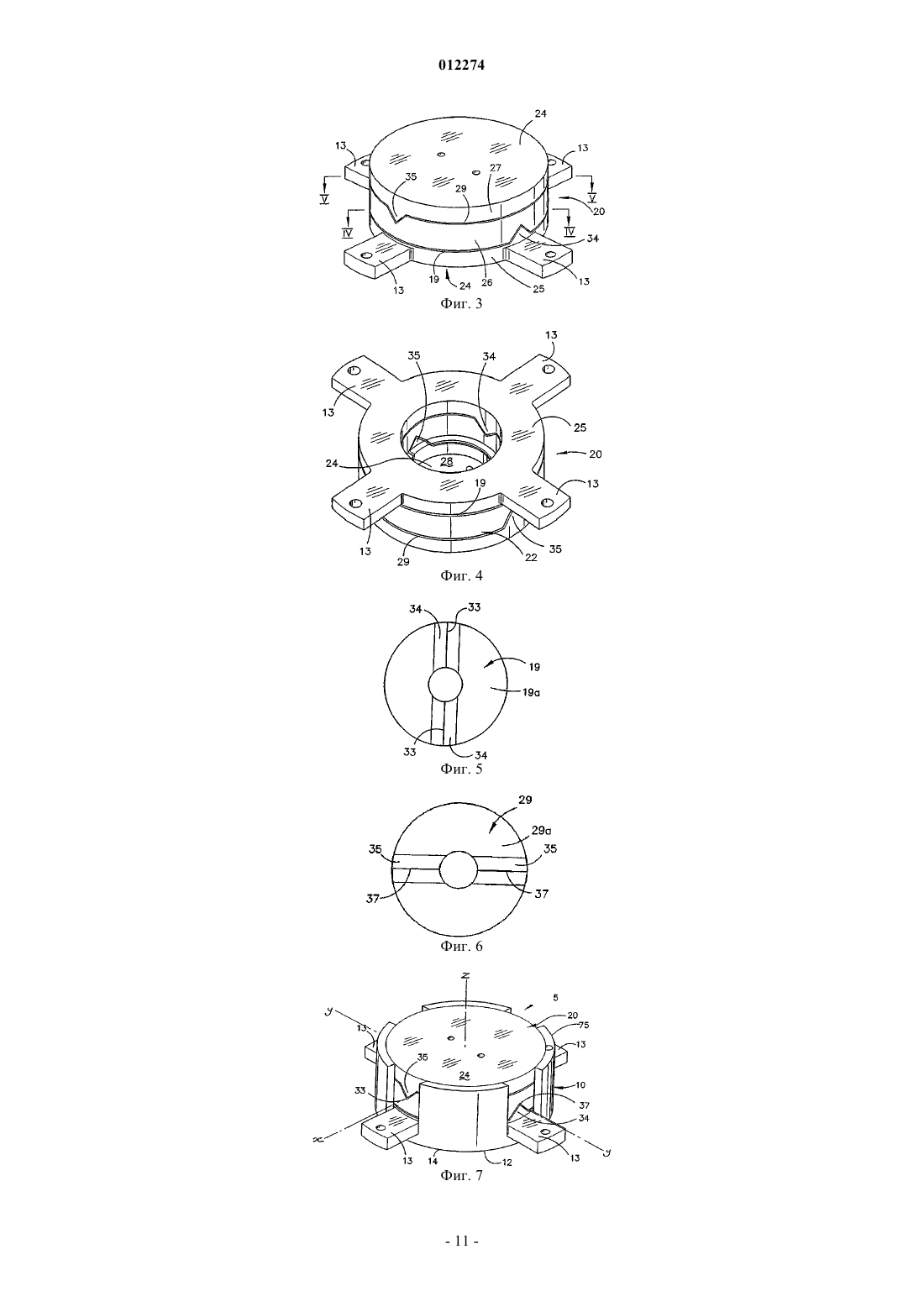
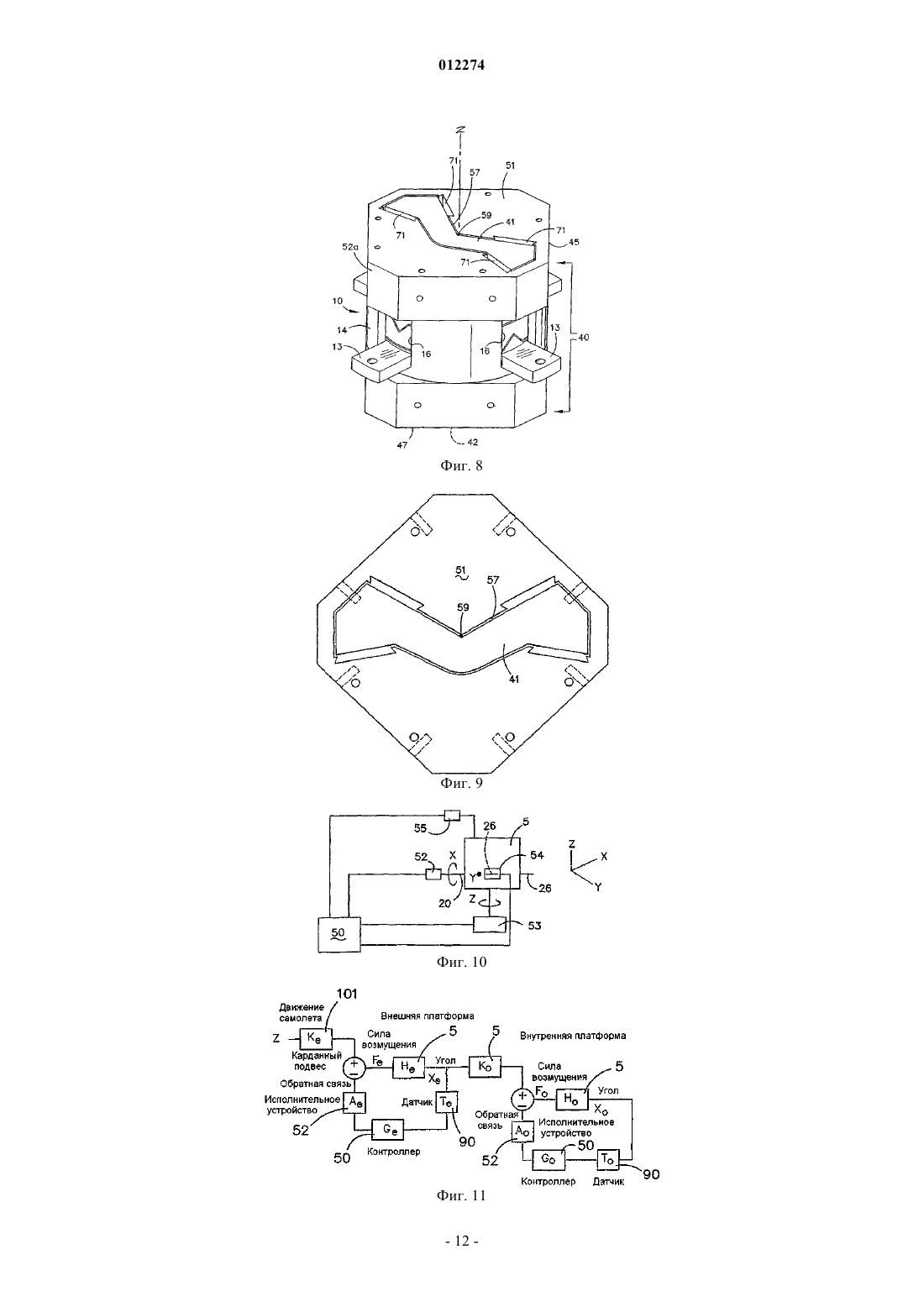
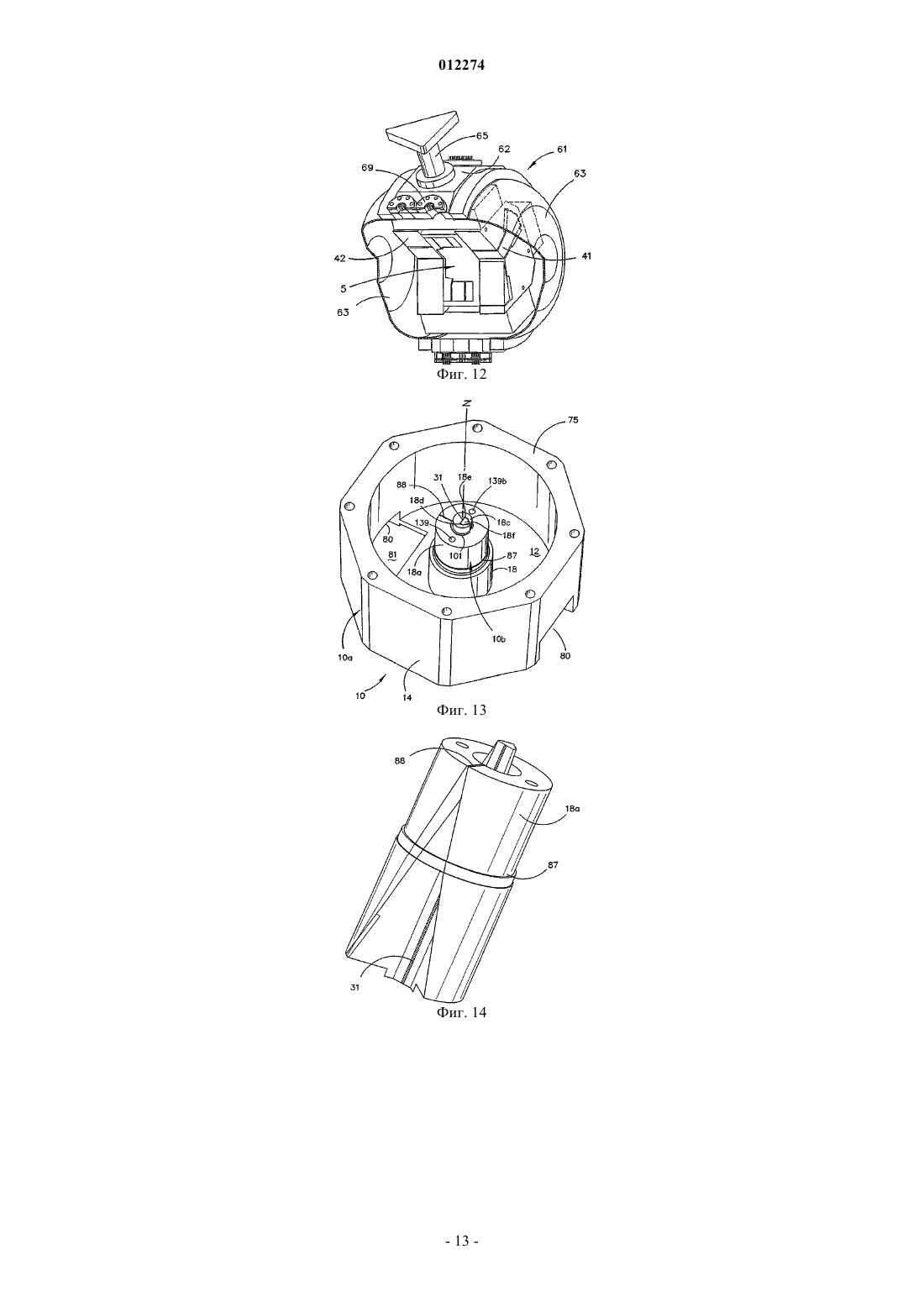
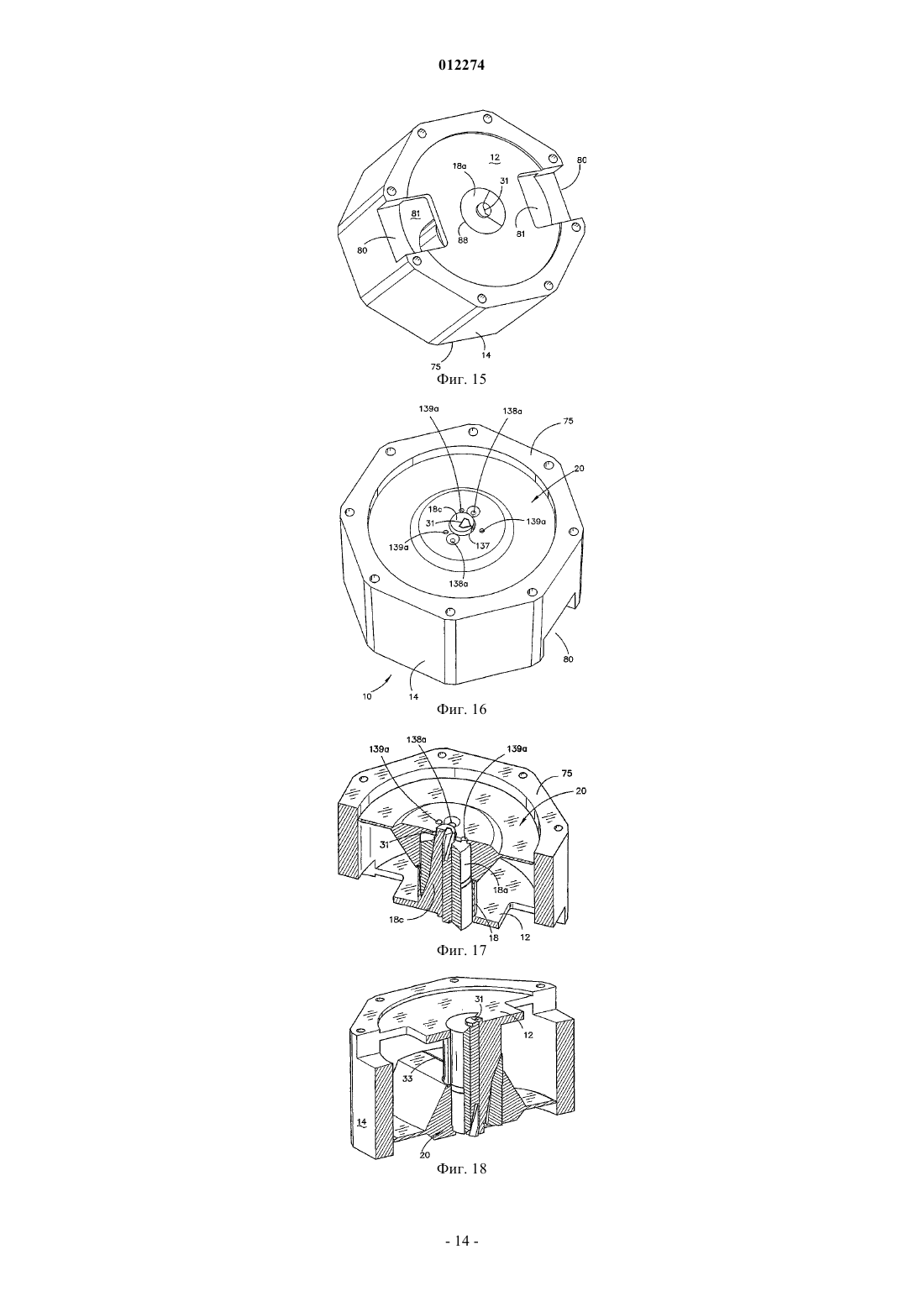
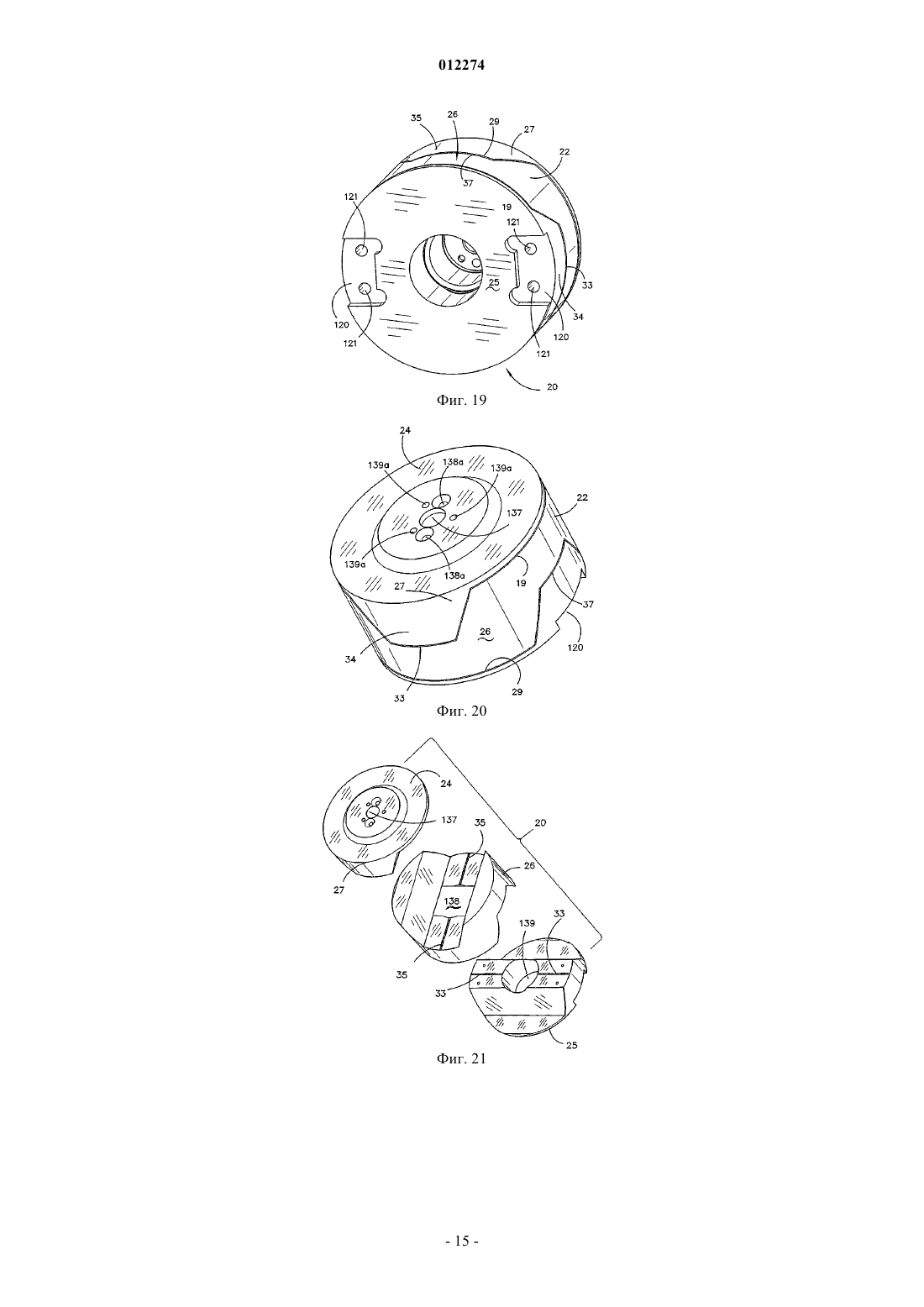
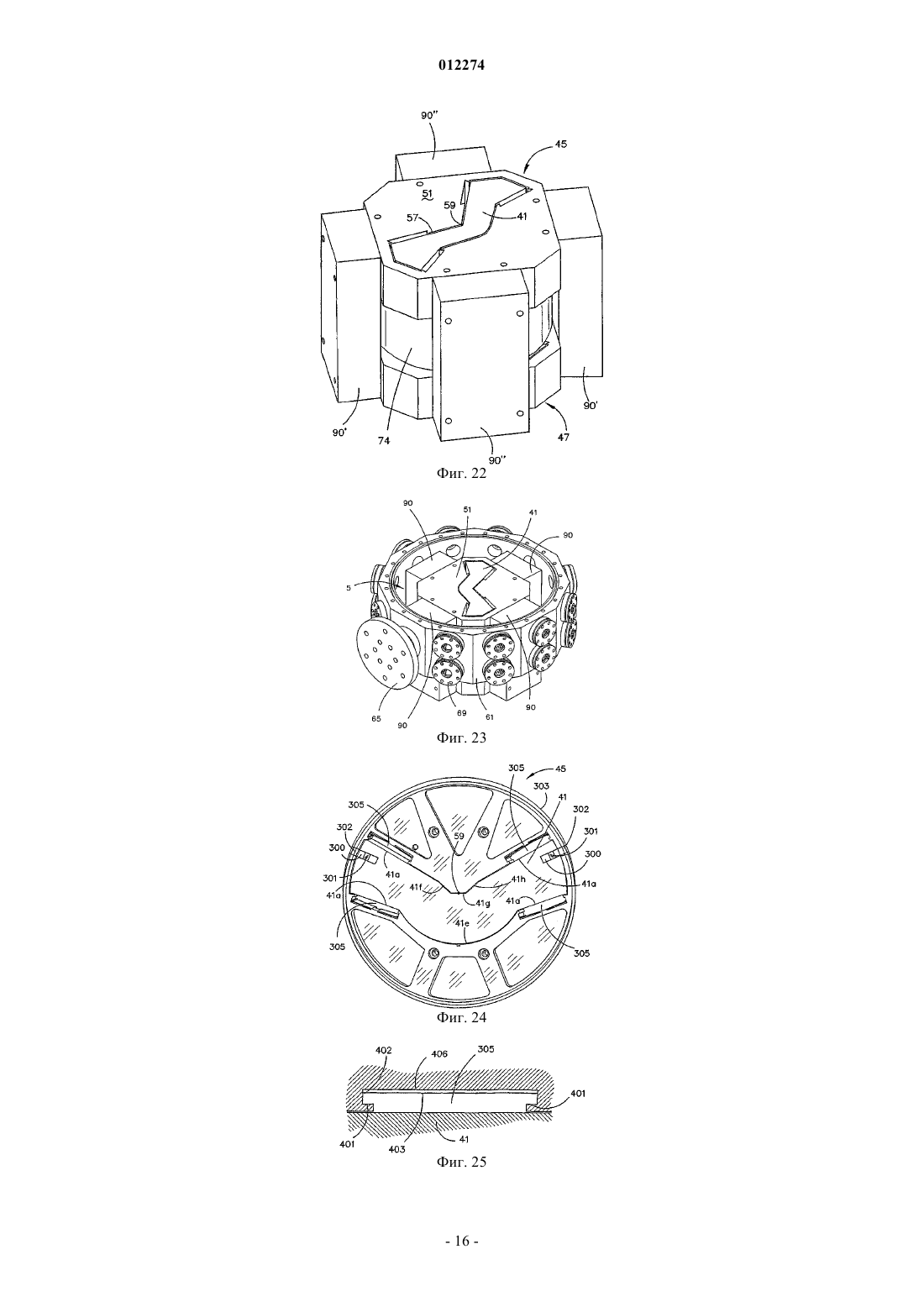
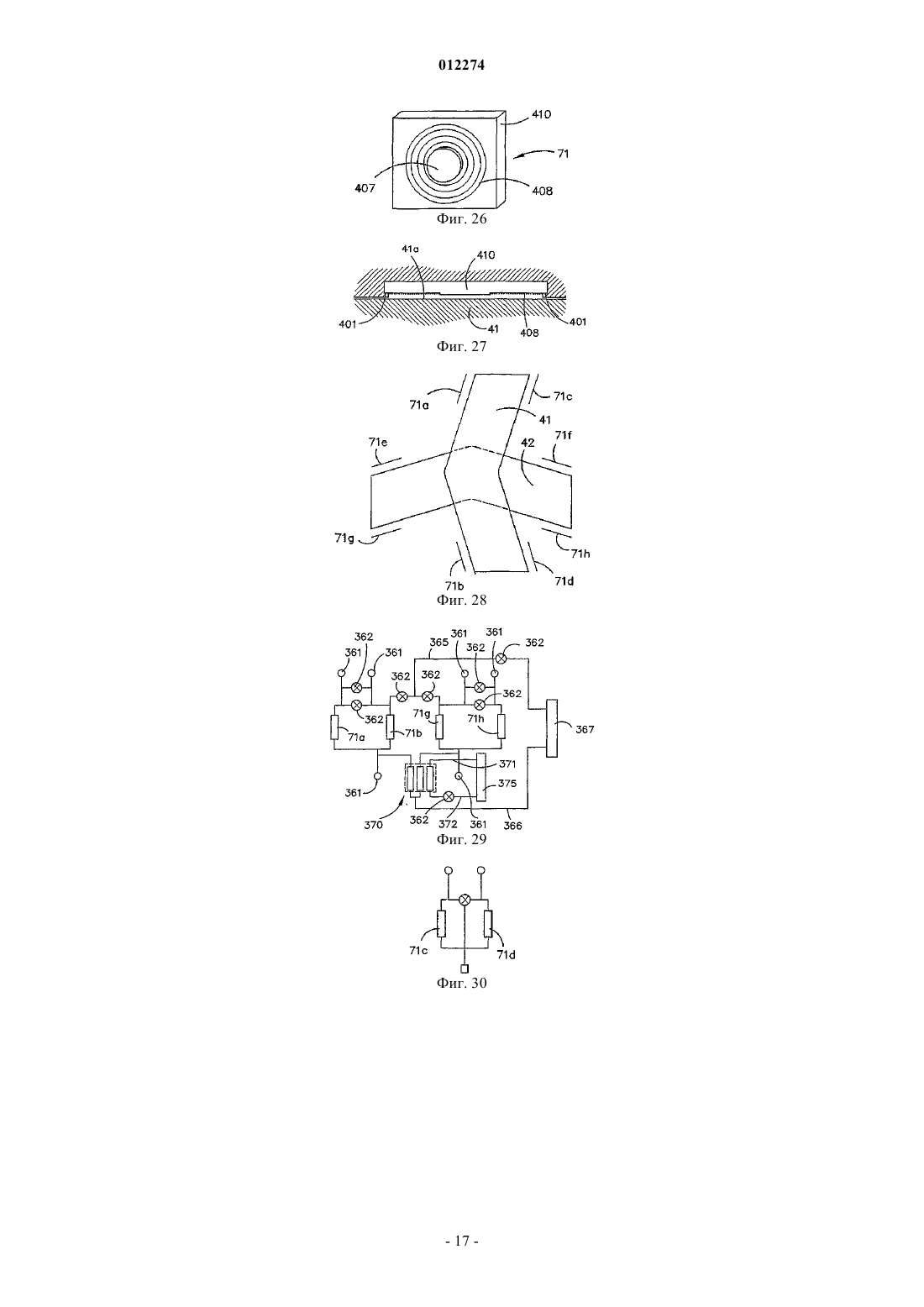
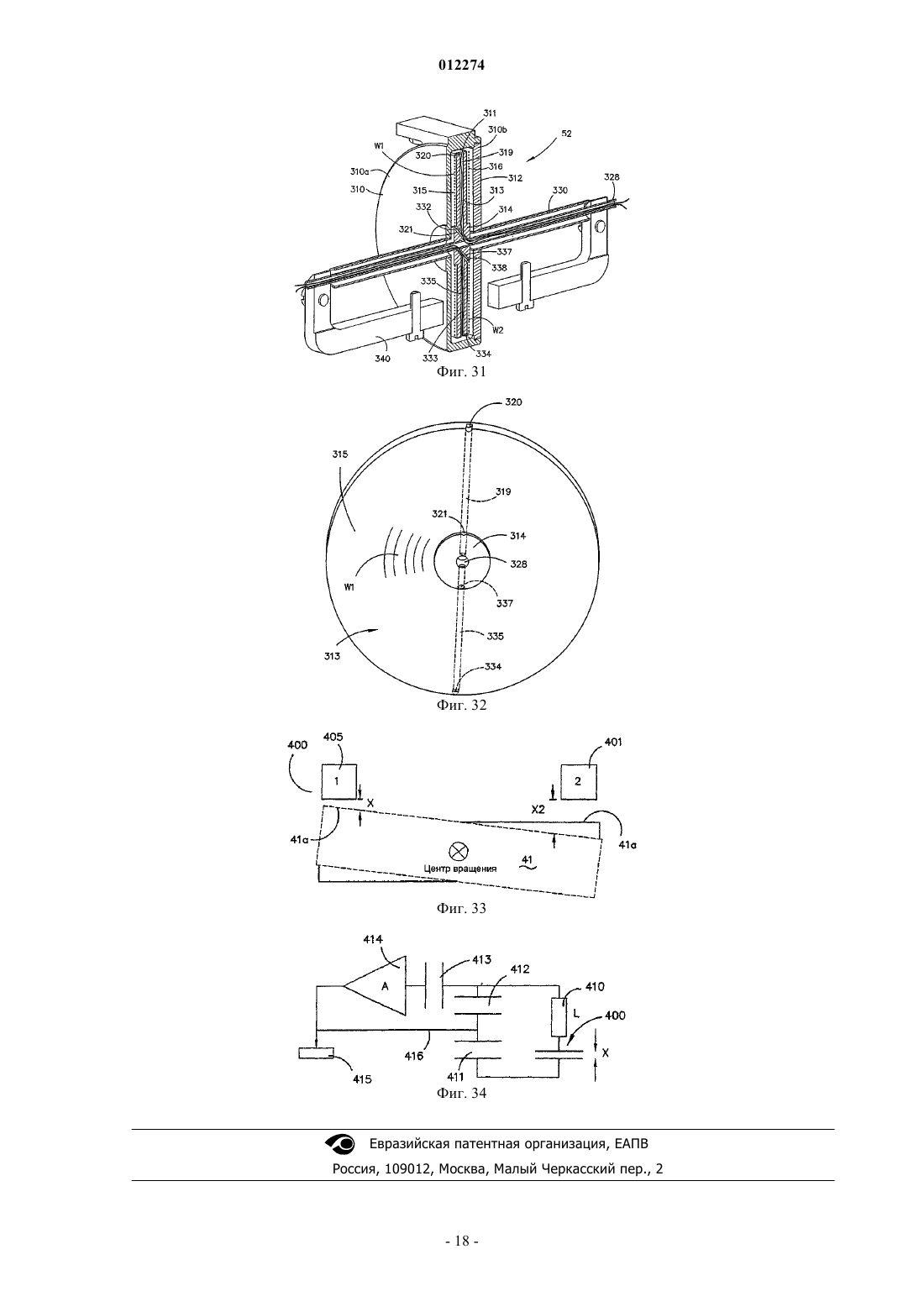
012274 Область техники, к которой относится изобретение Настоящее изобретение относится к гравитационному градиентометру, и, в частности, но не исключительно, к гравитационному градиентометру, предназначенному для использования на воздушных судах. В частности, изобретение можно применять для измерения диагонального и внедиагонального компонентов тензора гравитационного градиента. Уровень техники Гравиметры широко используются в геологической разведке для измерения первых производных гравитационного поля земли. Хотя некоторый прогресс был достигнут при разработке гравиметров, которые могут измерять первые производные гравитационного поля земли, из-за трудностей с характеризацией пространственных вариаций этого поля из-за временных флуктуаций ускорения движущегося транспортного средства, такие измерения обычно могут выполняться с достаточной точностью для применения в геологической разведке только при использовании установленных на земле стационарных инструментов. Гравитационные градиентометры (в отличие от гравиметров) используются для измерения второй производной гравитационного поля, и в них применяется сенсор, который требуется для измерения разности между гравитационными силами, вплоть до одной части в 1012 нормальной гравитации. Обычно такие устройства используются при попытке определения залежей полезных ископаемых,таких как месторождения руды, включая железную руду, и геологических структур, несущих углеводороды. В таком чувствительном оборудовании баланс брусков для поворотного вращения на несущих перемычки может быть критическим для точной работы, однако оборудование, раскрытое в международной публикации WO 90/07131 не имеет какого-либо обеспечения для регулирования баланса брусков после их установки. Настоящее изобретение предусматривает создание датчика с возможностью очень точного регулирования баланса движущихся частей перед работой градиентометра в криогенных условиях. Сущность изобретения В соответствии с изобретением предусматривается гравитационный градиентометр, предназначенный для измерения компонентов тензора гравитационного градиента, содержащий: датчик градиента гравитации, содержащий пару расположенных поперечно масс; калибровочный датчик, предназначенный для определения, сбалансированы ли массы при комнатной температуре, перед работой гравитационного градиентометра в криогенных условиях; механизм регулирования, предназначенный для регулирования баланса масс перед работой гравитационного градиентометра в криогенных условиях; и в котором калибровочный датчик содержит резонансный контур, имеющий индуктивность и конденсатор, первая пластина которого сформирована поверхностью одной из масс, и вторая пластина расположена через промежуток относительно этой поверхности одной из масс; и генератор, предназначенный для приема сигнала из резонансного контура и для формирования выходного сигнала, обозначающего баланс масс. Предпочтительно каждая масса содержит резонансный контур, ассоциированный с каждым концом каждой массы так, что, когда масса поворачивается, масса поворачивается вокруг оси вращения, и зазор между первой пластиной и второй пластиной резонансного контура увеличивается, и зазор между первой пластиной и второй пластиной другого резонансного контура уменьшается. Предпочтительно генератор представляет собой усилитель. Усилитель может быть сформирован на основе одного полевого транзистора. Предпочтительно выходной сигнал усилителя преобразуется в цифровую форму с помощью частотомера. Предпочтительно резонансный контур соединен с генератором с использованием множества конденсаторов. Предпочтительно механизм регулирования содержит множество винтовых элементов, передвигаемых внутри масс для балансирования масс. Предпочтительно массы установлены в корпусе и соединены с корпусом гибкой перемычкой, причем корпус имеет периферийную стенку, винтовые элементы расположены в каналах, выполненных в массах, и в периферийной стенке выполнены отверстия, совмещаемые с каналами в массах так, чтобы через отверстия можно было установить инструмент в канал в массе для регулирования положения винтовых элементов в массах для балансировки масс. Краткое описание чертежей Предпочтительные варианты выполнения изобретения будут описаны в качестве примера, со ссылкой на прилагаемые чертежи, на которых на фиг. 1 схематично представлен градиентометр в соответствии с одним вариантом выполнения изобретения. на фиг. 2 - вид в перспективе первого установочного узла, формирующего часть установочного уст-1 012274 ройства градиентометра в соответствии с предпочтительным вариантом выполнения; на фиг. 3 - второй установочный узел компоновки; на фиг. 4 - вид снизу установочного узла по фиг. 3; на фиг. 5 - вид в разрезе вдоль линии IV-IV, обозначенной на фиг. 3; на фиг. 6 - вид в разрезе вдоль линии V-V, обозначенной на фиг. 3; на фиг. 7 - вид собранной структуры; на фиг. 8 - вид, представляющий датчик, установленный на структуре карданного подвеса; на фиг. 9 - вид в плане бруска в соответствии с предпочтительным вариантом выполнения; на фиг. 10 - схема, представляющая управление исполнительным механизмом; на фиг. 11 - блок-схема, представляющая работу системы вращающегося держателя; на фиг. 12 - вид градиентометра в соответствии с предпочтительным вариантом выполнения; на фиг. 13 - вид первого установочного узла в соответствии со вторым вариантом выполнения; на фиг. 14 - вид части компоновки по фиг. 13, который иллюстрирует расположение и протяженность гибкой перемычки первого установочного узла; на фиг. 15 - вид снизу установочного устройства по фиг. 13; на фиг. 16 - вид установочного устройства по фиг. 13, включающий второй установочный узел в соответствии со вторым вариантом выполнения; на фиг. 17 - вид в разрезе сборки, показанной на фиг. 16; на фиг. 18 - вид снизу в разрезе части, показанной на фиг. 17; на фиг. 19 - вид снизу второго установочного узла в соответствии со вторым вариантом выполнения; на фиг. 20 - вид сверху второго установочного узла по фиг. 19; на фиг. 21 - вид с покомпонентным представлением деталей второго установочного узла в соответствии со вторым вариантом выполнения; на фиг. 22 - вид собранных установочного устройства и датчиков в соответствии со вторым вариантом выполнения; на фиг. 23 - вид в перспективе градиентометра с удаленной внешней частью вакуумного контейнера; на фиг. 24 - вид в плане корпуса для крепления бруска в соответствии с дополнительным вариантом выполнения изобретения; на фиг. 25 более подробно показан вид части корпуса по фиг. 24; на фиг. 26 - вид преобразователя, используемого в предпочтительном варианте выполнения; на фиг. 27 - вид, аналогичный фиг. 25, но представляющий преобразователь по фиг. 26, установленный на место; на фиг. 28 - схема, поясняющая цепи, показанные на фиг. 29 и 30; на фиг. 29 - принципиальная схема, относящаяся к предпочтительному варианту выполнения изобретения, в частности, представляющая использование одного из датчиков в качестве углового акселерометра; на фиг. 30 показана цепь настройки частоты; на фиг. 31 - вид в разрезе исполнительного устройства в соответствии с одним вариантом выполнения настоящего изобретения; на фиг. 32 - вид части исполнительного устройства по фиг. 31; на фиг. 33 - диаграмма, иллюстрирующая балансировку датчиков градиентометра в соответствии с предпочтительным вариантом выполнения; и на фиг. 34 - принципиальная схема датчика калибровки, используемого при балансировке градиентометра. Подробное описание предпочтительных вариантов выполнения изобретения На фиг. 1 схематично показан вид гравитационного градиентометра в соответствии с предпочтительным вариантом выполнения изобретения. Градиентометр, показанный на фиг. 1, содержит сосуд 1 Дьюара с двойными стенками, который закреплен на внешней платформе 2. Внешняя платформа 2 выполнена с возможностью регулировки сосуда Дьюара и, таким образом, содержания сосуда Дьюара вокруг трех ортогональных осей. Внешняя платформа 2 представляет собой общеизвестный элемент, и ее регулировка с помощью соответствующих двигателей или тому подобное также известна. Таким образом, подробное ее описание здесь не будет приведено. Внутри сосуда Дьюара предусмотрен вакуумный контейнер 3, и в сосуд Дьюара помещен жидкий газ, такой как жидкий гелий Не, что обеспечивает возможность работы градиентометра при криогенной температуре. Сосуд 1 Дьюара закрыт торцевой пластиной 4, которая включает в себя соединители 5 а,предназначенные для соединения электрических выводов (не показаны) с внешними компонентами (не показаны). Контейнер 3 закрыт торцевой пластиной 9, которая включает в себя соединители 5b, предназначенные для соединения электрических выводов (не показаны) с соединителями 5 а. Градиентометр имеет-2 012274 основной кожух 61, сформированный из двенадцатигранного кольца 62 и полусферических куполов 63(см. фиг. 12). Внутреннее установочное устройство 5 соединено с кольцом 62. На кольце 62 установлен держатель 65, к которому подведено питание через фланец 9. Укупорка 11 горлышка сформированная из перегородок 11 а, между которыми размещена пена 11b, расположена над контейнером 3. Перегородки 11 а закреплены на полом стержне 93, который продолжается внутрь контейнера 3 и который также используется для откачки воздуха из контейнера 3. На фиг. 2 показан первый установочный узел 10 вращающегося установочного устройства 5 (фиг. 7) градиентометра, который содержит основание 12 и вертикальную периферийную стенку 14. Периферийная стенка 14 выполнена с множеством вырезов 16. На основании 12 установлена втулка 18. На фиг. 3 и 4 показан второй установочный узел 20, который содержит периферийную стенку 22 и верхнюю стенку 24. Периферийная стенка 22 выполнена с четырьмя выступами 13, предназначенными для соединения установочного узла с кожухом 61. Верхняя стенка 24 и периферийная стенка 22 образуют зазор 28. Периферийная стенка 22 имеет первую часть 25, вторую часть 26 и третью часть 27. Второй установочный узел 20 имеет монолитную цельную структуру, и первая часть 25 сформирована путем формирования разреза 19 вдоль окружности через периферийную стенку, за исключением гибких перемычек, как будет описано ниже. Третья часть 27 сформирована путем формирования второго разреза 29 вдоль окружности через периферийную стенку 22, за исключением гибких перемычек, как будет описано ниже. Второй установочный узел 20 установлен на первом установочном узле 10 путем установки втулки 18 в зазор 28 и выступов 13 через соответствующие вырезы 16, как показано на фиг. 7. Первый установочный узел 10 соединен со вторым установочным узлом 20. Первая гибкая перемычка 31 сформирована в первом установочном узле 10, так, что первичный установочный участок установочного узла 10 может поворачиваться вокруг перемычки 31 относительно вторичного установочного участка установочного узла 10. Это будет более подробно описано со ссылкой на второй вариант выполнения, показанный на фиг. 13-21. Выступы 13 соединяют установочное устройство 5 в контейнере 3, который, в свою очередь, установлен в сосуде 1 Дьюара для работы градиентометра в криогенных условиях. Сосуд Дьюара, в свою очередь, установлен на первой внешней платформе для управления поворотом по курсу градиентометра вокруг трех ортогональных осей х, у, z. На установочном устройстве 5 установлен датчик 40 (который будет более подробно описан ниже и который, предпочтительно, выполнен в форме квадруполя массы) для более точной регулировки вращения вокруг осей х, у и z для стабилизации градиентометра во время выполнения измерений, в частности, когда градиентометр установлен на борту летательного аппарата. Первая гибкая перемычка 31 обеспечивает возможность движения первого установочного узла 10 относительно второго установочного узла 20 вокруг оси z, как показано на фиг. 7. На фиг. 5 и 6 показаны виды вдоль линий IV и V соответственно, которые, в свою очередь, проведены вдоль разрезов 19 и 29, представленных на фиг. 3. Периферийная стенка 22 может быть разрезана с использованием любого соответствующего режущего инструмента, такого как проволочная пила или тому подобное. На фиг. 5 показана нижняя поверхность 19 а, сформированная по разрезу 19. Как можно видеть на фиг. 3 и 5, разрез 19 имеет два перевернутых V-образных пика 34. Вершина пиков 34 не прорезана и поэтому формирует вторую гибкую перемычку 33, которая соединяет первую часть 25 со второй частью 26. Таким образом, вторая часть 26 выполнена с возможностью шарнирного поворота относительно первой части 25 вокруг оси х, как показано на фиг. 7. Второй разрез 29 показан на фиг. 6, и снова здесь представлена нижняя поверхность 29 а, сформированная по лини разреза 29. И снова второй разрез 29 формирует два V-образных пика 35 и вершины пиков 35 не прорезаны и поэтому формируют третью гибкую перемычку 37, которая соединяет вторую часть 26 с третьей частью 27. Таким образом, третья часть 27 выполнена с возможностью шарнирного поворота вокруг оси у, показанной на фиг. 7. На фиг. 8 показан датчик 40, установленный на установочном узле. Датчик 40 представляет собой датчик типа ортогонального квадрупольного ответчика OQR (ОКО), сформированного из первой массы и второй массы в форме первого бруска 41 и второго бруска 42 (не показанных на фиг. 8), который установлен ортогонально бруску 41, который имеет такую же форму, что и брусок 41. Брусок 41 сформирован в первом корпусе 45, и брусок 42 сформирован во втором корпусе 47. Брусок 41 и корпус 45 выполнены такими же, как и брусок 42 и корпус 47, за исключением того, что один из них повернут на 90 относительно другого так, что бруски установлены ортогонально. Таким образом,будет описан только корпус 45. Корпус 45 имеет торцевую стенку 51 и периферийную боковую стенку 52 а. Торцевая стенка 51 соединена с кромкой 75 (фиг. 2 и 7) стенки 14 первого установочного узла 10 с помощью винтов или тому подобное (не показаны). Брусок 41 сформирован в результате выреза 57 в стенке 51, за исключением четвертой гибкой перемычки 59, которая соединяет брусок 41 со стенкой 51. Гибкая перемычка показана с увеличением в виде сверху бруска 41 на фиг. 9. Таким образом, брусок 41 выполнен с возможностью поворота относительно корпуса 45 в соответствии с изменениями гравитационного поля. Брусок 42 установлен таким же образом, как описано выше и также может поворачиваться относительно своего корпуса 47 вокруг пятой гибкой перемычки 59, в соответствии с изменениями гравитационного поля. Корпус 47-3 012274 соединен с основанием 12 (фиг. 2) первого установочного узла 10. Брусок 41 и корпус 45 вместе с гибкой перемычкой 59 составляют цельную монолитную структуру. Преобразователи 71 (не показаны на фиг. 2-6) предусмотрены для измерения смещения брусков и для формирования выходных сигналов, обозначающих величину движения, и, следовательно, измеряют разность гравитационного поля, которую воспринимают бруски. На фиг. 10 показана блок-схема, представляющая управление исполнительным механизмом для стабилизации градиентометра, посредством поворота установочного устройства 5 вокруг трех ортогональных осей (х, у, z). Контроллер 50, который может представлять собой компьютер, микропроцессор или тому подобное, выводит сигналы в исполнительные устройства 52, 53, 54 и 55. Исполнительное устройство 52 может поворачивать установочное устройство 5 вокруг оси х, исполнительное устройство 54 может поворачивать установочное устройство 5 вокруг оси у, и исполнительное устройство 54 может поворачивать установочное устройство 5 вокруг оси z. Однако в предпочтительном варианте выполнения два из этих четырех исполнительных устройств 52, 53, 54 и 55 используются для поворота установочных узлов вокруг каждой из осей так, что поворот вокруг каждой из осей обеспечивается с помощью комбинации двух прямолинейных движений, обеспечиваемых двумя исполнительными устройствами. Прямолинейное движение, создаваемое каждым из исполнительных устройств, будет описано со ссылкой на фиг. 31 и 32. Положение установочного устройства 5 отслеживается так, что соответствующая обратная связь может быть предусмотрена для контроллера 50, соответствующие сигналы управления подают в исполнительное устройство для поворота установочного узла 10, в соответствии с требованиями стабилизации установочного узла во время движения через воздух внутри самолета или на буксире позади самолета. Предпочтительный вариант выполнения также включает в себя угловые акселерометры, которые имеют форму, аналогичную брускам 41 и 42, но их форма отрегулирована так, чтобы был получен нулевой квадрупольный момент. Линейные акселерометры представляют собой простые подвесные устройства с одиночным микрошарниром, который действует, как гибкая петля. На фиг. 11 показан вид схемы управления с обратной связью, используемой в предпочтительном варианте выполнения. На фиг. 12 показан вид с вырезом градиентометра, готового для установки в сосуд Дьюара 1 для работы в криогенных условиях, который, в свою очередь, установлен на внешней платформе. Хотя на фиг. 2-8 показан градиентометр с брусками 41 и 42, установленными сверху и снизу, инструмент фактически повернут набок (на 90) так, что бруски 41 и 42 располагаются по торцам, как показано на фиг. 12. На фиг. 12 представлено установочное устройство 5, установленный внутри кожуха 61, сформированного кольцом 62 и прозрачными полусферическими торцами 63. Кольцо 22 имеет соединители 69,предназначенные для соединения внутренних проводов разводки от преобразователей 71 (см. фиг. 8) и электронных компонентов SQuID (СКИУ, сверхпроводящее квантовое интерференционное устройство),установленных в кожухе 61 с соединителями 5b (фиг. 1). Преобразователи 71 измеряют угол смещения брусков 41 и 42, и схема управления (не показана) выполнена с возможностью измерения разности между ними. Коррекция ошибки может выполняться в цифровом виде на основе преобразованных в цифровую форму сигналов от акселерометров и датчика температуры. Преобразователи 71 представляют собой преобразователи на основе СКИУ, и коррекция ошибки становится возможной благодаря большому динамическому диапазону и линейности преобразователей на основе СКИУ. На фиг. 13-21 показан второй вариант выполнения, в котором аналогичные части обозначат те же компоненты, которые были описаны выше. В данном варианте выполнения первый установочный узел 10 выполнен с вырезами 80, которые фактически формируют пазы для установки выступов (не показаны), которые соединены с установочным узлом 10 внутри вырезов 80 и также со вторым установочным узлом 20, показанным на фиг. 19-21. В этом варианте выполнения выступы выполнены как отдельные компоненты так, что они могут быть сделаны меньшими по размеру и, более просто, затем вырезаются во второй установочной секции 20, которая формирует вторую гибкую перемычку 33 и третью гибкую перемычку 37. На фиг. 13 разрез 87 выполнен так, что он образует часть 18 а втулки 18. Разрез 87 затем продолжается радиально внутрь в позиции 88 и затем вокруг центральной секции 18 с, как показано по разрезу 101. Разрез 101 затем входит в центральную секцию 18 с вдоль линий 18d и 18 е разреза, образуя сердцевину 18f. Сердцевина 18f соединена с центральной секцией 18 с с помощью гибкой перемычки 31, которая представляет собой не прорезанную часть между линиями 18 е и 18d разреза. Часть 10 а, таким образом,формирует первичный установочный участок установочного узла 10, который отделен от вторичного установочного участка 10b установочного узла 10, за исключением места, в котором участок 18 а соединяется с участком 10b гибкой перемычкой 31. Часть 18 а фактически формирует ось, которая обеспечивает возможность вращения части 10 а относительно части 10b в направлении z вокруг гибкой перемычки 31. Как показано на фиг. 14, линия 88 разреза расширяется наружу от верхнего торца, показанного на-4 012274 фиг. 14, до нижнего торца, и сердечник 18 с расширяется наружу с соответствующей формой, как лучше всего показано на фиг. 17. Как можно видеть на фиг. 13-18, первый установочный узел 10 выполнен восьмиугольным по форме, а не круглым, как в предыдущем варианте выполнения. На фиг. 19-21 показан второй установочный узел 20. На фиг. 16 показан второй установочный узел 20, установленный внутри первого установочного узла 10. Как лучше всего показано на фиг. 19 и 20,второй установочный узел 20 выполнен с вырезами 120, которые совмещаются с вырезами 80 для вставки в них выступов (не показаны). Выступы могут быть привинчены ко второму установочному узлу 20 болтами, которые пропущены через выступы и в отверстия 121 для болтов. Выступы (не показаны) устанавливают на установочном узле 20 прежде, чем установочный узел 20 будет закреплен на первом установочном узле 10. В варианте выполнения, показанном на фиг. 19 и 20, пики 34 и перевернутые пики 35 выполнены сглаженными, а не V-образными, как в предыдущем варианте выполнения. В данном варианте выполнения на верхней стенке 24 предусмотрено центральное отверстие 137 и два соединительных отверстия 138 а. Три меньших отверстия 139 а предусмотрены для облегчения выталкивания корпуса 45 из части 18 а, в случае, если требуется разборка. Когда второй установочный узел 20 расположен внутри первого установочного узла 10, верхняя часть центральной секции 18 с выступает через отверстие 137, как лучше всего показано на фиг. 16. Установочный узел 20 может быть затем соединен с установочным узлом 10 с помощью креплений, которые проходят через отверстия 138 и соединяются в отверстиях 139b (см. фиг. 13) в части 18 а. Таким образом, когда первый корпус 45 и связанный с ним брусок 41 соединены с кромкой 75 установочного узла 10, и второй корпус 47 соединен с основанием 12, корпуса 45 и 47 и ассоциированные с ними бруски 41 и 42, таким образом, могут двигаться вокруг трех ортогональных осей, определенных гибкой перемычкой 31, гибкой перемычкой 33 и гибкой перемычкой 37. Как лучше всего видно на фиг. 21, на которой представлен вид с покомпонентным изображением деталей трех частей 25, 26 и 27, которые составляют второй установочный узел 20, отверстие продолжается через установочный узел 20, который сформирован с отверстием 137, отверстием 138 и отверстием 139. Следует понимать, что установочный узел 20, показанный на фиг. 21, имеет монолитную структуру и показан с покомпонентным представлением только для того, чтобы ясно иллюстрировать расположение гибких перемычек 33 и 35. Очевидно, что гибкая перемычка 33, показанная на фиг. 21, соединяется с частью 26, и гибкая перемычка 35, показанная на фиг. 21, соединяется с частью 27. Отверстия 137, 138 и 139 образуют проход, через который может продолжаться ось первого участка 18 а первого установочного узла 10, когда второй установочный узел 20 расположен внутри первого установочного узла 10. Таким образом, когда второй установочный узел 20 закреплен на части 18 а, второй установочный узел 20 может поворачиваться вместе с первой частью 10 а первого установочного узла 10 вокруг оси z,определенной гибкой перемычкой 31, в то время как второй участок, сформированный частью 18 а, остается неподвижным. Движение вокруг осей х и у достигается благодаря поворотному движению второго установочного узла 20 вокруг гибких перемычек 33 и 35, как описано выше. На фиг. 22 показаны линейный и кольцевой акселерометры 90, закрепленные на корпусах 45 и 47. Гравитационный градиент придает крутящий момент жесткому телу и с любым распределением массы, при условии, что он имеет ненулевой квадрупольный момент. Для плоского тела, установленного в плоскости х-у и вращаемого вокруг оси z, квадруполь представляет собой разность между моментами инерции в направлениях х и у. Таким образом, квадрат или круг имеет нулевой квадрупольный момент, в то время как прямоугольник имеет ненулевое значение. Образующийся крутящий момент представляет собой то, что составляет сигнал, измеряемый градиентометром. Существует два динамических возмущения, которые также могут создавать крутящие моменты и,следовательно, представляют собой источники ошибки. Первый представляет собой линейное ускорение. Он создает крутящий момент, если центр инерции не точно расположен в центре вращения, то есть,брусок является "несбалансированным". Бруски 41 и 42 сбалансированы насколько это возможно (используя установочные винты для регулировки положения центра инерции), но этого не достаточно, поэтому остается остаточная ошибка. Эта ошибка может быть скорректирована путем измерения линейного ускорения и с использованием его для цифрового вычитания части ошибки сигнала. Второй представляет собой угловое движение. Существуют два аспекта углового движения, каждый из которых осоздает разную ошибку. Первый аспект представляет собой угловое ускорение. Угловое ускорение создает крутящий момент в распределенной массе через ее момент инерции(даже если квадрупольный момент равен нулю). Он составляет чрезвычайно большую ошибку, и для противодействия ему используются две предпочтительные методики. Первая состоит в использовании внутренней стабилизации вращения. Она представлена в блоксхеме, показанной на фиг. 10. Здесь Ho(s) представляет датчик в сборке, вращающийся вокруг устано-5 012274 вочного устройства 5 (как на фиг. 9). Блок A(s) представляет собой исполнительное устройство, которое обеспечивает крутящий момент обратной связи для обеспечения стабилизации в результате подавления сторонних возмущений. T(s) представляет датчик (или преобразователь), который измеряет эффект стороннего возмущения. Он представляет собой угловой акселерометр. Использование угловых акселерометров для управления вращением является необычным - обычно используют гиродатчики и/или сильно демпфированные измерители наклона, но в данном случае угловые акселерометры лучше, поскольку ошибка пропорциональна возмущению углового ускорения. Во-вторых, используют подавление синфазной помехи CMRR (КПСП, коэффициент подавления синфазной помехи), по этой причине требуется использовать 2 ортогональных бруска. Для двух брусков крутящий момент ошибки, создаваемой при угловом ускорении, направлен в том же направлении, но сигнальный крутящий момент, создаваемый под действием гравитационного градиента, направлен в противоположном направлении. Поэтому путем измерения разности отклонения между двумя брусками, обеспечивается измерение градиента, а не углового ускорения. Таким образом, предусмотрены два отдельных угловых акселерометра 90 (обозначены 90' на фиг. 22 для простоты идентификации). От двух пар ОКО брусков 41 и 42 получают два независимых выходных сигнала. Первый пропорционален разности в отклонении, на основе которого получают сигнал градиента, и второй пропорционален сумме их отклонений, которая пропорциональна угловому ускорению,и образует датчик для управления вращением вокруг оси z. Для осей х и у требуются отдельные угловые акселерометры. Стабилизация вращения вокруг этих осей требуется, поскольку оси поворота двух брусков не являются точно параллельными и также позволяют противодействовать второй форме ошибки, образующейся в результате углового возмущения, описанного ниже. Второй аспект составляет угловая скорость. Угловая скорость создает центробежные силы, которые также представляют источник ошибки. Внутренняя стабилизация вращения, обеспечиваемая исполнительными устройствами, уменьшает угловое движение так, что ошибка становится меньше 1 Этвеш. На фиг. 23 показан основной корпус 61 и соединитель 69 с удаленными полусферическими торцами. На фиг. 24 показан вид в плане корпуса 45 в соответствии с еще одним дополнительным вариантом выполнения изобретения. Как можно видеть на фиг. 24, корпус 45 выполнен скорее круглым, а не восьмиугольным, как в случае варианта выполнения по фиг. 8. В корпусе 45 установлен брусок 41, так же, как описано выше, с помощью гибкой перемычки 59,которая расположена в центре инерции бруска 41. Брусок 41 имеет форму шеврона, хотя в данном случае форма шеврона несколько отличается от формы, используемой в более ранних вариантах выполнения, и имеет более закругленную кромку 41 е, расположенную напротив гибкой перемычки 59, и корытообразную секцию 41f, 41g и 41h стенки рядом с гибкой перемычкой 59. На торцах бруска 41 выполнены резьбовые каналы 300 для винтов, в которые установлены винтовые резьбовые элементы 301, которые могут быть выполнены в форме пробок, такие как регулировочные винты или тому подобное. Каналы 300 совмещены с отверстиями 302 на периферийной стенке 52 а корпуса 45. Отверстия 302 обеспечивают доступ к пробкам 301 при использовании отвертки или другого инструмента, что позволяет завинчивать и вывинчивать пробки 301 в канал 300 для регулировки их положения в канале, для балансирозки массы 41, так, чтобы центр тяжести находился на гибкой перемычке 59. Как показано на фиг. 24, каналы 300 расположены под углом 45 к горизонтали и вертикали, как показано на фиг. 24. Таким образом, два канала 302, показанные на фиг. 24, расположены под прямыми углами относительно друг друга. На фиг. 24 также показаны зазоры 305, предназначенные для установки в них преобразователя 71,который требуется для отслеживания смещения бруска 41 и формирования сигналов, которые передаются в устройство СКИУ. Обычно преобразователь выполнен в форме катушки и, когда брусок 41 немного перемещается под действием разности сил тяжести на концах бруска, возникает изменение емкости, которое изменяет ток, протекающий через катушку, в результате чего формируется сигнал, обозначающий движения бруска 41. На фиг. 25 показан более подробный вид части корпуса по фиг. 24, представляющий зазоры 305. Как можно видеть на фиг. 25, зазоры 305 выполнены с буртиками 401, которые формируют канавки 402. Пружина 403 установлена рядом с поверхностью 406. На фиг. 26 показан преобразователь 71. Преобразователь 71 сформирован из, в общем, прямоугольной пластины 410 из макора (механически обрабатываемая стеклокерамика), в которой выполнено круглое утолщение 407. Катушка 408 намотана вокруг утолщения 407 и может удерживаться на месте с помощью полимерного материала или тому подобное. Катушка 408 может представлять собой многослойную или однослойную обмотку. На фиг. 27 показано расположение пластины 410 в отверстии 305, в котором пластина помещается в канавки 402 и прижимается с помощью пружины 403 к буртикам 401, так, что пластина 410 удерживает-6 012274 ся на месте, и катушка 408 располагается рядом со стороной поверхности 41 а кромки бруска 41. Таким образом, катушка 408 и брусок 41 формируют LC цепь, в результате чего при движении бруска 41 ток, протекающий через катушку 408, изменятся. Как можно видеть на фиг. 24, четыре преобразователя 71 расположены рядом с торцами бруска 41. В другом корпусе 47 также установлены четыре преобразователя, расположенные рядом с бруском 42. Таким образом, в градиентометре предусмотрены восемь преобразователей 71. На фиг. 28 показана схема брусков 41 и 42, представляющая их в конфигурации "во время использования". Преобразователи, которые расположены в зазорах 305, обозначены ссылочными позициями 71 а-71 е так же, как и на принципиальных схемах, показанных на фиг. 29 и 30. Как показано на фиг. 29 и 30, преобразователи 71 а и 71b, связанные с бруском 41, и преобразователи 71g и 71 е, связанные с бруском 42, используются для обеспечения измерения гравитационного градиента. На выходные выводы 361 подают входной ток в сверхпроводящие схемы, показанные на фиг. 29. Тепловые переключатели, которые могут быть выполнены в форме резисторов 362, предусмотрены и используются для исходной установки сверхпроводимости тока в цепи. Тепловые переключатели 362 первоначально включаются в течение очень короткого периода времени для нагрева тех частей цепи, в которых расположены резисторы 362, для вывода этих частей цепи из сверхпроводящего состояния. Ток затем может быть пропущен по сверхпроводящей цепи, и когда тепловые переключатели, сформированные резисторами 362, выключают, соответствующие части цепи снова становятся сверхпроводящими, в результате чего ток может циркулировать через цепи, и при этом на них влияет любое изменение, связанное с движением брусков 41 и 42 под действием градиента гравитации и углового ускорения, как будет описано ниже. Преобразователи 71 а, 71b, 71g и 71 е соединены параллельно с линией 365 цепи и линией 366 цепи,которые соединены со СКИУ 367. Таким образом, когда бруски 41 и 42 вращаются вокруг своих соответствующих гибких перемычек,бруски 41 и 42, например, приближаются ближе к преобразователю 71 а и поэтому удаляются дальше от преобразователя 71b, и ближе к преобразователю 71h, и также дальше от преобразователя 71g, соответственно. В результате изменяется ток, протекающий через преобразователи, и эти токи фактически вычитаются друг из друга для получения сигналов, обеспечивающих измерение градиента гравитации. Как показано на фиг. 31, преобразователи 71 с и 71d формируют отдельную цепь, и их используют для настройки частоты бруска 41 и преобразователей 71 а и 71b. Аналогично, преобразователи 71 е и 71f используют для настройки частоты бруска 42 и преобразователей 71g и 71h. Настройка частоты брусков является важной, поскольку бруски должны быть идентичны, с тем, чтобы погасить угловые ускорения. Схемы настройки частоты, поэтому, обеспечивают возможность электронной настройки брусков для согласования их резонансных частот и для достижения режима режекции так, чтобы каждый из брусков функционировал идентично. Преобразователи 71 а, 71b, 71g и 71h также используются для формирования угловых акселерометров для измерения углового смещения установочного устройства 5, в результате чего могут быть получены сигналы обратной связи для компенсации углового смещения. С этой целью линия 366 соединена с преобразователем 370. Полярность сигналов от преобразователей 71 а и 71b, и 71g, и 71h изменяют на противоположную, в результате чего выходной сигнал преобразователя 370 в линиях 371 и 372 представляет собой сумму сигналов, а не их разность, как в случае, когда измеряют градиент, в результате чего сумма сигналов дает меру углового движения брусков. Выходы 371 и 372 соединены с устройством 375 СКИУ, которое обеспечивает меру углового ускорения, которое можно использовать в цепи по фиг. 10, для получения сигналов компенсации для стабилизации установочного устройства 5. Таким образом, в соответствии с предпочтительным вариантом выполнения изобретения, угловые акселерометры 90' обеспечивают измерение углового ускорения, например, вокруг осей х и у, и угловые акселерометры, сформированные брусками 41 и 42 и преобразователями 71 а, 71b, 71g и 71h, обеспечивают измерение углового ускорения вокруг, например, оси z. На фиг. 31 и 32 показано исполнительное устройство, предназначенное для приема сигналов управления, для регулирования установочного устройства в соответствии с угловым смещением установочного устройства 5. Исполнительное устройство, показанное на фиг. 31 и 32, схематично представлено на фиг. 10 и обозначено ссылочными позициями 52, 53, 54 и 55. Все исполнительные устройства выполнены одинаково,и на фиг. 31 и 32 будут описаны со ссылкой на исполнительное устройство 52, которое обеспечивает регулировку вокруг оси х, показанной на фиг. 10. Исполнительное устройство 52, показанное на фиг. 31, имеет корпус 310 в виде полого диска, который имеет установочную скобу 311, предназначенную для соединения корпуса 310 в форме диска с установочным устройством 5. Корпус 310 в виде полого диска, таким образом, образует внутреннюю камеру 312, в которой расположена пластина для закрепления катушки в форме диска 313. Диск 313 имеет широкую секцию 314 ступицы и две кольцевые поверхности 315 и 316, на которых вокруг ступицы 314 на-7 012274 мотаны катушки W1 и W2. В диске 313 также предусмотрены радиальный канал 319 и отверстие 320 во внешней кромке диска 313, которое соединено с каналом 319. Отверстие 321 предусмотрено на втулке 314 и соединено с каналом 319, и продолжается до полого стержня 328, который расположен в трубке 330. Стержень 330 закреплен на диске 313, а также на раме 340 держателя, которая закреплена на основном кожухе 61 (не показан на фиг. 31). Трубка 330 соединена с корпусом 310 диска для движения с корпусом 310 относительно диска 313,стержня 328 и рамы 340. Обмотка W1, предусмотренная на стороне 315, имеет вывод 331, который пропущен через отверстие 320 и затем через канал 319 в отверстие 321, и затем через трубку 328 вправо, как показано на фиг. 31. Вывод 332 другого конца обмотки W1 пропущен через отверстие 321 и через полый стержень 328 также вправо, так что ток можно подавать в обмотку W1 через выводы 331 и 332. Вторая обмотка W2, установленная на стороне 316, имеет вывод 333, который пропущен через радиальное отверстие 334 и канал 345 в диске 313 и затем через отверстие 337 в трубку 328 и влево по фиг. 31. Другой конец обмотки W2 имеет вывод 338, который пропущен через отверстие 337 в трубку 328 и влево по фиг. 31. Таким образом, ток может протекать через обмотку W2 по выводам 333 и 338. Когда к обмоткам W1 и W2 подключают питание, или ток, протекающий через обмотки, изменяется, корпус 310 диска движется относительно диска 313 и рамы 340 и, поскольку корпус 310 диска соединен с установочным устройством 5 с помощью скобы 311, в случае исполнительного устройства 52 обеспечивается регулировка установочного устройства 5. Движение корпуса 310 диска обычно представляет собой продольное движение (то есть, линейное движение) в направлении оси трубки 330 и стержня 328. Для облегчения такого движения между концами стержня 330 и рамой 340, вокруг диска 313 предусмотрен промежуток. Скоба 311 смещена относительно гибкой перемычки (такой как гибкая перемычка 37), в результате чего движение корпуса 310 придает крутящий момент первой части 25 установочного устройства 5, что обеспечивает вращение части 25 вокруг гибкой перемычки 37. В предпочтительном варианте выполнения изобретения четыре исполнительных устройства предусмотрены для обеспечения фактической регулировки вокруг различных осей, и гибкие перемычки, и исполнительные устройства работают в комбинации, в соответствии с сигналами, принимаемыми от угловых акселерометров, для поддержания стабильности установочного устройства 5, при использовании градиентометра. Для работы градиентометра в криогенных условиях, установочное устройство 5, корпуса 45 и 47,бруски 41 и 42, корпус 310 в виде полого диска, катушки и электрические выводы, указанные выше, изготовлены из сверхпроводящего материала, такого как ниобий. В вариантах выполнения изобретения, в случае, когда градиентометр не работает в криогенных условиях, компоненты могут быть изготовлены из других материалов, таких как алюминий. Угловые акселерометры 90' имеют нулевой квадрупольный момент, что означает, что центр инерции совпадает с гибкой перемычкой и что, следовательно, они являются не чувствительными ни к градиенту гравитации, ни к центробежной силе. Линейные акселерометры 90" (фиг. 22) также могут быть предусмотрены. Линейные акселерометры 90" не обеспечивают активную компенсацию, но они могут использоваться для коррекции конечных измеренных данных градиента. Таким образом, данные, получаемые при измерении линейного ускорения, могут быть записаны и могут использоваться при последующей обработке. Один или оба бруска 41 и 42 также можно использовать как угловой акселерометр для получения измерения углового смещения установочного устройства 5, что позволяет генерировать соответствующие сигналы обратной связи для компенсации такого движения под управлением с помощью исполнительных устройств, описанных выше. В предпочтительном варианте выполнения предусмотрены четыре угловых акселерометра, при этом два угловых акселерометра сформированы брусками 41 и 42. Использование четырех акселерометров, установленных под углами 45 относительно друг друга, обеспечивают возможность регулировки вокруг осей х, у и z, в любой момент времени используя крутящий момент, передаваемый от двух или более исполнительных устройств. Диск 310 предотвращает выход потока от обмоток W1 и W2 из исполнительного устройства, возможность выхода потока за пределы исполнительного устройства также существенно ограничивается благодаря тому, что выводы 331 и 332, и 333, и 338 выведены из исполнительного устройства через удлиненную трубку 330. Таким образом, паразитные магнитные поля, которые могут отрицательно повлиять на работу инструмента, не генерируются исполнительным устройством и поэтому не влияют на чувствительность или работу прибора. Трубка 330 предпочтительно имеет отношение длины к диаметру по меньшей мере 10:1. Пластина 316 в форме диска, предпочтительно, изготовлена из макора, и корпус 310 в виде полого диска сформирован из двух частей 310 а и 310b. Часть 310b формирует панель крышки, которая обеспе-8 012274 чивает возможность размещать диск 313 в камере 312, и затем корпус 310 диска закрывается путем помещения пластины 310b на место. Способ обеспечения баланса брусков 41 и 42 будет описан со ссылкой на фиг. 33 и 34. Пара датчиков перемещения, сформированных конденсаторами 400 и 401, предусмотрена с двумя основными целями: 1. Измерения остаточной чувствительности к линейному ускорению для каждого из брусков 41 (и 42), что позволяет механически балансировать бруски, используя установочные винты 301, описанные со ссылкой на фиг. 24, перед работой при низких температурах; и 2. Измерения чувствительности к индуцированному линейному ускорению каждого из брусков 41 и 42. Бруски 41 и 42 в своих соответствующих корпусах поворачивают на 360 в настроечном приспособлении (не показано). Это обеспечивает диапазон ускорений 2 gE, которые обычно в 100 раз больше,чем ускорения, обычно придаваемые при низких температурах. Типичное требование состоит в том, чтобы конденсаторы 400 и 401 обеспечивали возможность регистрировать 0,1 нм в течение периода 1-20 минут. Пара конденсаторов 400 и 401 требуется для каждого бруска для обеспечения возможности различать некоторый дрейф датчиков, поскольку поворот бруска 41 приводит к тому, что емкость одного конденсатора 400 увеличивается и другого конденсатора 401 уменьшается на одну и ту же величину, как показано на фиг. 33, в то время как тепловое расширение приводит к увеличению выходных сигналов обоих конденсаторов 400 и 401. Конденсаторы 400 и 401 остаются на месте, даже при том, что они не используются при низких температурах, и поэтому их компоненты должны быть немагнитными, чтобы они не создавали помеху работе градиентометра и, в частности, расположенным рядом с ними сверхпроводящим цепям. На фиг. 33 показано, что при повороте бруска 41, промежуток, применяемый к конденсатору 400,уменьшается и промежуток конденсатора 401 увеличивается. Конденсаторы 400 и 401 сформированы стороной 41 а бруска 41 (и соответствующей стороной другого бруска 42), и вторыми пластинами 405, которые расположены на некотором расстоянии от стороны 41 а. Зазор между пластинами соответствующих конденсаторов 400 и 401 обычно должен быть установлен равным приблизительно 1 часть на тысячу. На фиг. 34 показана калибровочная схема, применяемая для конденсатора 400. Схема для другого конденсатора 401 выполнена идентично. Конденсатор 400 вместе с индуктивностью 410 формируют резонансный контур с большим коэффициентом добротности. Индуктивность 410 и конденсатор 400 подключены параллельно конденсаторам 411 и 412 и соединены через конденсатор 413 с усилителем 414. Выход усилителя 414 подключен к частотомеру 415 и также присоединен через цепь обратной связи к точке соединения конденсаторов 412 и 411 с помощью линии 416. Конденсатор 400, поэтому, определяет рабочую частоту усилителя 414, которую можно считывать с высокой точностью. Если брусок 41 не сбалансирован, частотомер 415 проявляет тенденцию дрейфа показаний, из-за несбалансированности бруска. Брусок можно балансировать путем перемещения настроечных винтов 301 внутрь и наружу из массы, как описано выше, пока не будет обеспечен баланс. Усилитель 414 затем может быть отсоединен от частотомера 415, в результат чего градиентометр может быть установлен внутри сосуда 1 Дьюара вместе с другими деталями схемы, показанными на фиг. 34 на место. Поскольку модификации в пределах сущности и объема изобретения могут быть непосредственно выполнены специалистами в данной области техники, следует понимать, что настоящее изобретение не ограничивается конкретным вариантом выполнения, описанным выше в качестве примера. В формуле изобретения, которая следует далее, и в предыдущем описании изобретения, за исключением случаев, когда контекст требует другого, в описании и в соответствии с необходимым смыслом,слово "содержать" или его вариации, такие как "содержит" или "содержащий", используются во включающем смысле, то есть, обозначают присутствие указанных свойств, но не исключают присутствие или возможность добавления других свойств в различных вариантах выполнения изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Гравитационный градиентометр, предназначенный для измерения компонентов тензора гравитационного градиента, содержащий датчик градиента гравитации, содержащий пару расположенных поперечно друг другу масс,имеющих форму брусков; калибровочный датчик, предназначенный для определения перед работой гравитационного градиентометра в криогенных условиях, сбалансированы ли массы при комнатной температуре; механизм регулирования баланса масс перед работой гравитационного градиентометра в криогенных условиях и в котором упомянутый калибровочный датчик содержит резонансный контур, имеющий индуктивность и конденсатор, первая пластина которого сформирована поверхностью одной из масс и вторая пластина расположена через промежуток относительно этой-9 012274 поверхности одной из масс, и генератор, предназначенный для приема сигнала из резонансного контура и для формирования выходного сигнала, обозначающего баланс масс. 2. Гравитационный градиентометр по п.1, в котором каждая масса, имеющая форму бруска, содержит резонансный контур, связанный с каждым концом каждой массы так, что, когда масса поворачивается, она поворачивается вокруг оси вращения, зазор между первой пластиной и второй пластиной резонансного контура увеличивается и зазор между первой пластиной и второй пластиной другого резонансного контура уменьшается. 3. Гравитационный градиентометр по п.1, в котором генератор представляет собой усилитель. 4. Гравитационный градиентометр по п.3, в котором усилитель сформирован на основе отдельного полевого транзистора. 5. Гравитационный градиентометр по п.3, в котором выходной сигнал усилителя преобразуется в цифровую форму с помощью частотомера. 6. Гравитационный градиентометр по п.1, в котором резонансный контур соединен с генератором с использованием множества конденсаторов. 7. Гравитационный градиентометр по п.1, в котором механизм регулирования содержит множество винтовых элементов, передвигаемых внутри масс для балансирования масс. 8. Гравитационный градиентометр по п.1, в котором массы, имеющие форму брусков, установлены в корпусе и соединены с корпусом гибкой перемычкой, причем корпус имеет периферийную стенку,винтовые элементы расположены в каналах, выполненных в массах, и в периферийной стенке выполнены отверстия, совмещаемые с каналами в массах так, чтобы через отверстия можно было установить инструмент в канал в массе для регулирования положения винтовых элементов в массах для балансировки масс.
МПК / Метки
МПК: G01V 7/16
Метки: градиентометр, гравитационный
Код ссылки
<a href="https://eas.patents.su/19-12274-gravitacionnyjj-gradientometr.html" rel="bookmark" title="База патентов Евразийского Союза">Гравитационный градиентометр</a>
Гравитационный градиентометр
Номер патента: 11644
Опубликовано: 28.04.2009
Авторы: Ван Канн Фрэнк Йоахим, Винтерфлад Джон
МПК: G01V 7/16
Метки: гравитационный, градиентометр
Формула / Реферат:
1. Гравитационный градиентометр, предназначенный для измерения компонентов тензора гравитационного градиента, содержащий датчик, предназначенный для измерения компонентов тензора градиента; установочное устройство, предназначенное для крепления датчика, причем установочное устройство содержит первую установочную секцию, имеющую основание и первую установочную периферийную стенку, причем периферийная стенка выполнена с множеством вырезов, первая...
Гравитационный градиентометр
Номер патента: 12192
Опубликовано: 28.08.2009
Авторы: Ван Канн Фрэнк Йоахим, Винтерфлад Джон
МПК: G01V 7/16
Метки: гравитационный, градиентометр
Формула / Реферат:
1. Гравитационный градиентометр, предназначенный для измерения компонентов тензора градиента гравитации, содержащий датчик, предназначенный для измерения компонентов тензора градиента гравитации; установочный узел, предназначенный для обеспечения возможности вращения вокруг трех, по существу, ортогональных осей и для установки датчика, установочный узел содержит: (a) первую установочную секцию; (b) вторую установочную секцию; (c) первую гибкую...
Предыдущий патент: Способ обессеривания раствора синтетического каучука (варианты)
Следующий патент: Электростатический фрикционный генератор
Случайный патент: Машина для уборки и измельчения кукурузы и других стеблевидных сельскохозяйственных растений