Способ определения веса груза, несомого подъемником подъемного устройства, и взвешивающее устройство




Формула / Реферат
1. Способ определения веса груза, несомого подъемником подъемного устройства, в котором определение веса базируется по меньшей мере на одном смещении вверх и одном смещении вниз подъемника, при этом подъемник смещается посредством гидропривода, входящего в гидравлическую систему, причем в течение смещения вверх и вниз подъемника давление в гидравлической системе измеряется с помощью датчика давления, предоставляя сигнал давления, а параметр, зависящий от положения подъемника, измеряется с помощью измерительного прибора, предоставляя сигнал положения, причем вес груза определяется на основе сигнала давления и сигнала положения, отличающийся тем, что сигнал положения регистрируют как функцию времени, посредством этого зависящий от ускорения параметр определяют на основе изменения сигнала положения и определение веса выполняют в зависимости от упомянутого зависящего от ускорения параметра.
2. Способ по п.1, отличающийся тем, что сигнал давления регистрируют как функцию времени, зависящий от скорости параметр определяют как функцию времени на основе изменения сигнала положения, причем выбирают момент времени в течение смещения вверх подъемника и выбирают момент времени в течение смещения вниз подъемника, так что значения зависящего от скорости параметра для соответствующих выбранных моментов во времени, по существу, равны, и определение веса выполняют в зависимости от значений сигнала давления, зарегистрированного для соответствующих выбранных моментов во времени, и в зависимости от значений зависящего от ускорения параметра, определенного для соответствующих выбранных моментов во времени.
3. Способ по п.2, отличающийся тем, что определение веса выполняют в зависимости от значений сигнала положения, зарегистрированного для соответствующих выбранных моментов времени.
4. Способ по п.2 или 3, отличающийся тем, что определение веса выполняют в зависимости от значений зависящего от скорости параметра, определенного для соответствующих выбранных моментов времени.
5. Способ по п.1, отличающийся тем, что в течение одного вверх и одного вниз смещения подъемника скорость и ускорение подъемника определяют на основе изменения сигнала положения и представляют пользователю в реальном времени посредством устройства вывода, при этом пользователь с помощью гидравлического клапана управляет подъемником, чтобы поддерживать скорость, по существу, в пределах некоторого диапазона и ускорение, по существу, ниже некоторого предела, посредством этого определяют два периода времени, в течение упомянутого одного вверх и упомянутого одного вниз смещения подъемника, причем в течение этих периодов времени определенная скорость находится в пределах упомянутого диапазона, и определенное ускорение находится ниже упомянутого предела, и при этом вес груза определяют на основе средних значений сигналов ускорения и давления в течение упомянутых периодов времени.
6. Способ по п.5, отличающийся тем, что вес груза определяют на основе средних значений сигналов положения и скорости в течение упомянутых периодов времени.
7. Способ по любому из пп.1-6, отличающийся тем, что общий коэффициент трения подъемного устройства определяют на основе одного вверх и одного вниз смещения подъемника, несущего груз, который должен быть взвешен, при этом определение веса базируется на определенном общем коэффициенте трения.
8. Способ по любому из пп.1-7, отличающийся тем, что сигнал положения формируют с помощью расходомера, измеряющего поток гидравлической текучей среды через трубу для гидропривода.
9. Способ по любому из пп.1-8, отличающийся тем, что сигналы от датчика давления и от измерительного прибора, предоставляющего параметр, зависящий от положения подъемника, регистрируют как выборочные значения в компьютере, при этом компьютер вычисляет сигнал положения и сигнал давления и на основе этого определяет вес груза.
10. Способ по любому из пп.1-9, отличающийся тем, что операцию взвешивания автоматически выполняют с помощью процессора при инициировании пользователем, при этом гидропривод управляется процессором, чтобы смещать подъемник один раз в направлении вверх и один раз в направлении вниз.
11. Взвешивающее устройство для определения веса груза, несомого подъемником подъемного устройства, причем подъемник выполнен с возможностью смещения посредством гидропривода, входящего в гидравлическую систему подъемного устройства, причем взвешивающее устройство содержит процессор, адаптированный, чтобы определять вес на основе по меньшей мере одного вверх и одного вниз смещения подъемника, датчик давления, адаптированный, чтобы измерять давление в гидравлической системе подъемного устройства и, тем самым, предоставлять сигнал давления, и измерительный прибор, адаптированный, чтобы измерять параметр, зависящий от положения подъемника подъемного устройства и, тем самым, предоставлять сигнал положения, и процессор, который адаптирован, чтобы определять вес груза на основе сигнала давления и сигнала положения, предоставленных датчиком давления и измерительным прибором, соответственно, в течение смещения вверх и вниз подъемника, отличающийся тем, что процессор адаптирован, чтобы регистрировать сигнал положения как функцию времени, чтобы определять зависящий от ускорения параметр на основе изменения сигнала положения, и чтобы определять вес в зависимости от упомянутого зависящего от ускорения параметра.
12. Взвешивающее устройство по п.11, отличающееся тем, что процессор адаптирован, чтобы регистрировать сигнал давления как функцию времени, определять зависящий от скорости параметр как функцию времени на основе изменения сигнала положения и выбирать момент времени в течение смещения вверх подъемника и выбирать момент времени в течение смещения вниз подъемника, так что значения зависящего от скорости параметра для соответствующих выбранных моментов времени, по существу, равны, и чтобы выполнять определение веса в зависимости от значений сигнала давления, зарегистрированного для соответствующих выбранных моментов времени, и в зависимости от значений зависящего от ускорения параметра, определенного для соответствующих выбранных моментов времени.
13. Взвешивающее устройство по п.12, отличающееся тем, что процессор адаптирован, чтобы выполнять определение веса в зависимости от значений сигнала положения, зарегистрированного для соответствующих выбранных точек во времени.
14. Взвешивающее устройство по п.12 или 13, отличающееся тем, что процессор адаптирован, чтобы выполнять определение веса в зависимости от значений зависящего от скорости параметра, определенного для соответствующих выбранных точек во времени.
15. Взвешивающее устройство по п.11, отличающееся тем, что процессор адаптирован, чтобы определять в течение одного вверх и одного вниз смещения подъемника скорость и ускорение подъемника на основе сигнала положения, при этом взвешивающее устройство содержит устройство вывода, адаптированное, чтобы представлять определенные скорость и ускорение пользователю в реальном времени, причем процессор адаптирован, чтобы информировать пользователя через устройство вывода, управлять подъемником, чтобы поддерживать скорость, по существу, в пределах некоторого диапазона и ускорение, по существу, ниже некоторого предела, причем процессор адаптирован, чтобы определять два периода времени, в течение упомянутого одного вверх и упомянутого одного вниз смещения подъемника соответственно, в течение этих периодов времени определенная скорость находится в пределах упомянутого диапазона, и определенное ускорение находится ниже упомянутого предела и при этом процессор адаптирован, чтобы определять вес груза на основе средних значений сигналов ускорения и давления в течение упомянутых периодов времени, соответственно.
16. Взвешивающее устройство по п.15, отличающееся тем, что процессор адаптирован, чтобы определять вес груза на основе средних значений сигналов положения и скорости в течение упомянутых периодов времени, соответственно.
17. Взвешивающее устройство по любому из пп.11-16, отличающееся тем, что процессор адаптирован, чтобы определять общий коэффициент трения подъемного устройства на основе одного вверх ш одного вниз смещения подъемника, несущего груз, который должен быть взвешен, и чтобы определять вес на основе определенного общего коэффициента трения.
18. Взвешивающее устройство по любому из пп.11-17, отличающееся тем, что расходомер предоставляется, чтобы измерять поток гидравлической текучей среды через трубу для гидропривода и, тем самым, предоставлять сигнал положения.
19. Взвешивающее устройство по п.18, отличающееся тем, что взвешивающее устройство содержит блок, имеющий сквозную трубную часть, адаптированную чтобы подходить линейно в трубе для гидропривода подъемного устройства, причем расходомер и датчик давления интегрированы в блок и выполнены с возможностью измерять поток через и давление, соответственно, в трубной части.
20. Взвешивающее устройство по любому из пп.11-19, отличающееся тем, что процессор относится к компьютеру, адаптированному, чтобы регистрировать как выборочные значения, сигналы от датчика давления и от измерительного прибора, предоставляющего параметр, зависящий от положения подъемника, при этом компьютер адаптирован, чтобы вычислять сигнал положения и сигнал давления на основе зарегистрированных сигналов от датчика давления и от измерительного прибора и чтобы определять вес груза на основе этого.
21. Взвешивающее устройство по любому из пп.11-20, отличающееся тем, что процессор адаптирован, чтобы автоматически выполнять операцию взвешивания при инициировании пользователем, в силу чего гидропривод управляется с помощью процессора, чтобы смещать подъемник один раз в направлении вверх и один раз в направлении вниз.
22. Подъемное устройство, содержащее взвешивающее устройство по любому из пп.11-21.
23. Подъемное устройство по п.22, отличающееся тем, что подъемное устройство является вильчатым погрузчиком.

Текст
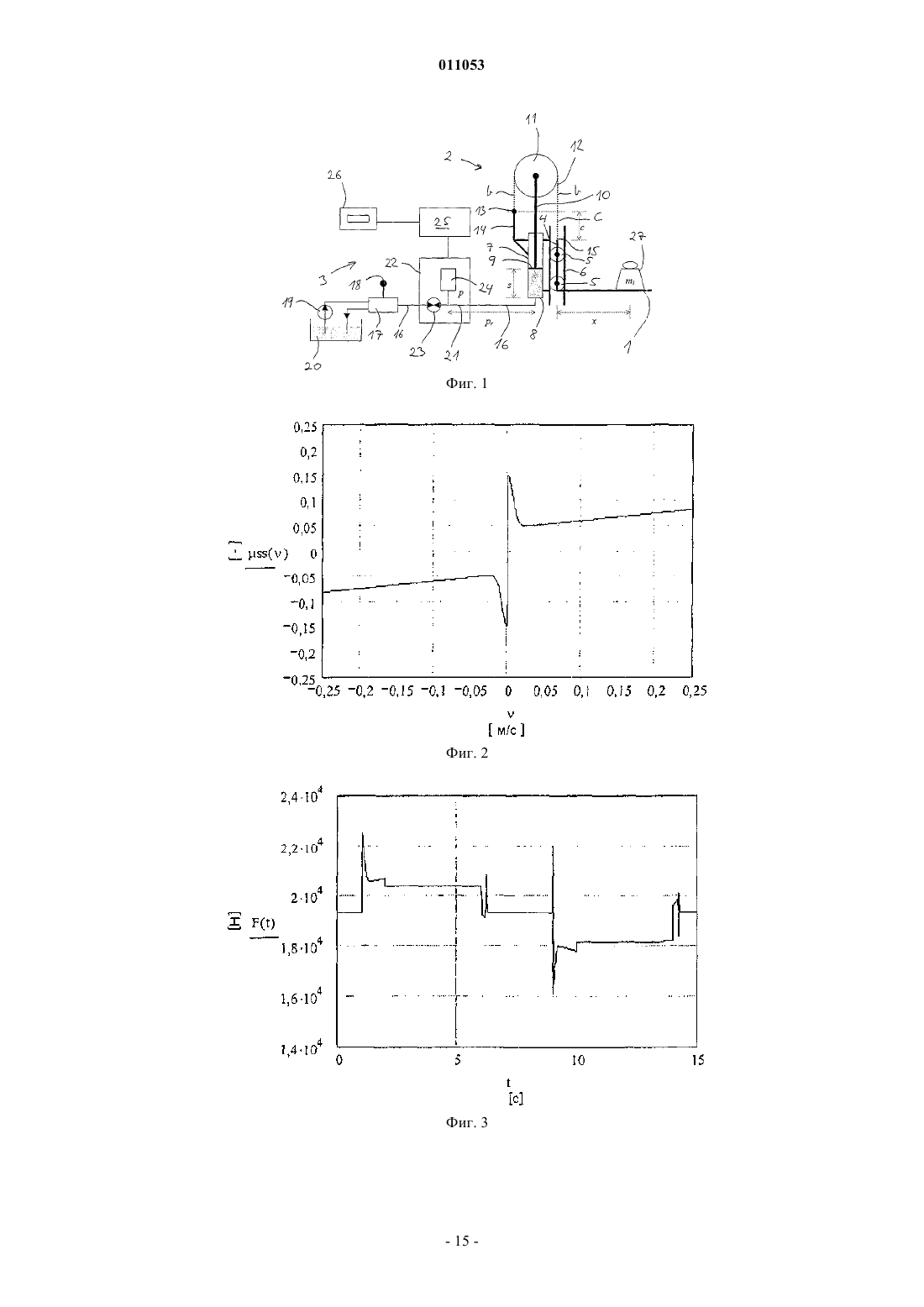
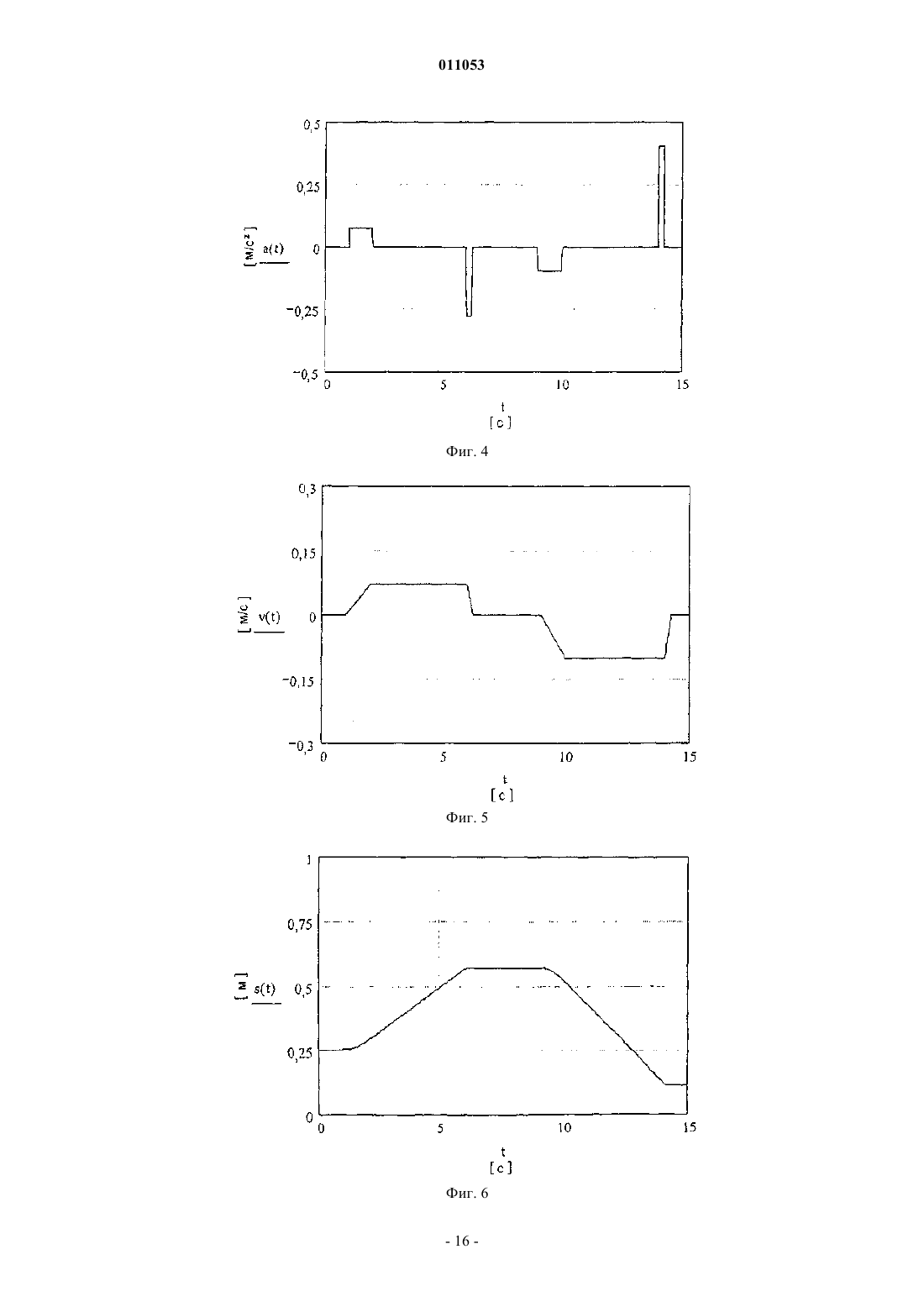
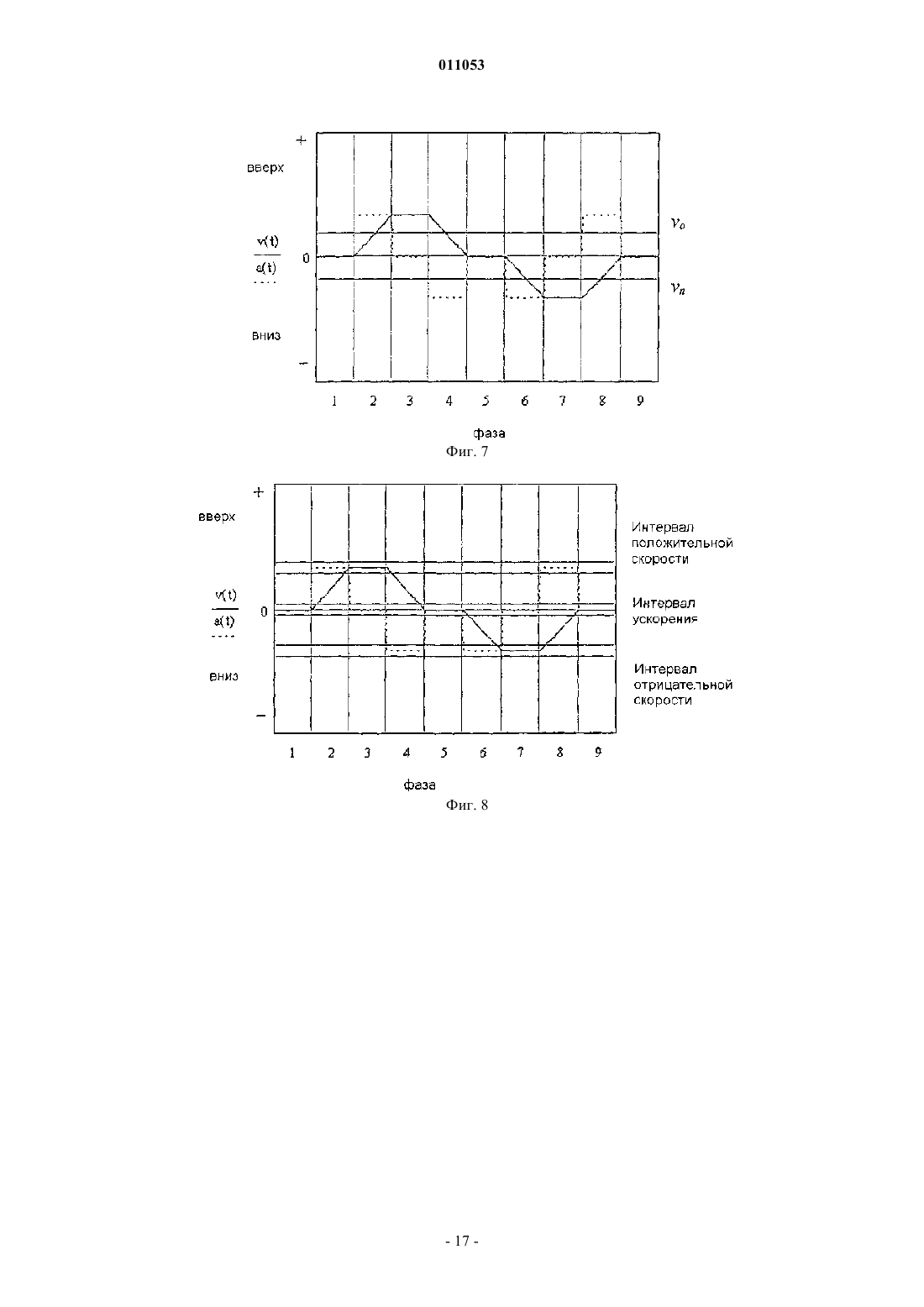
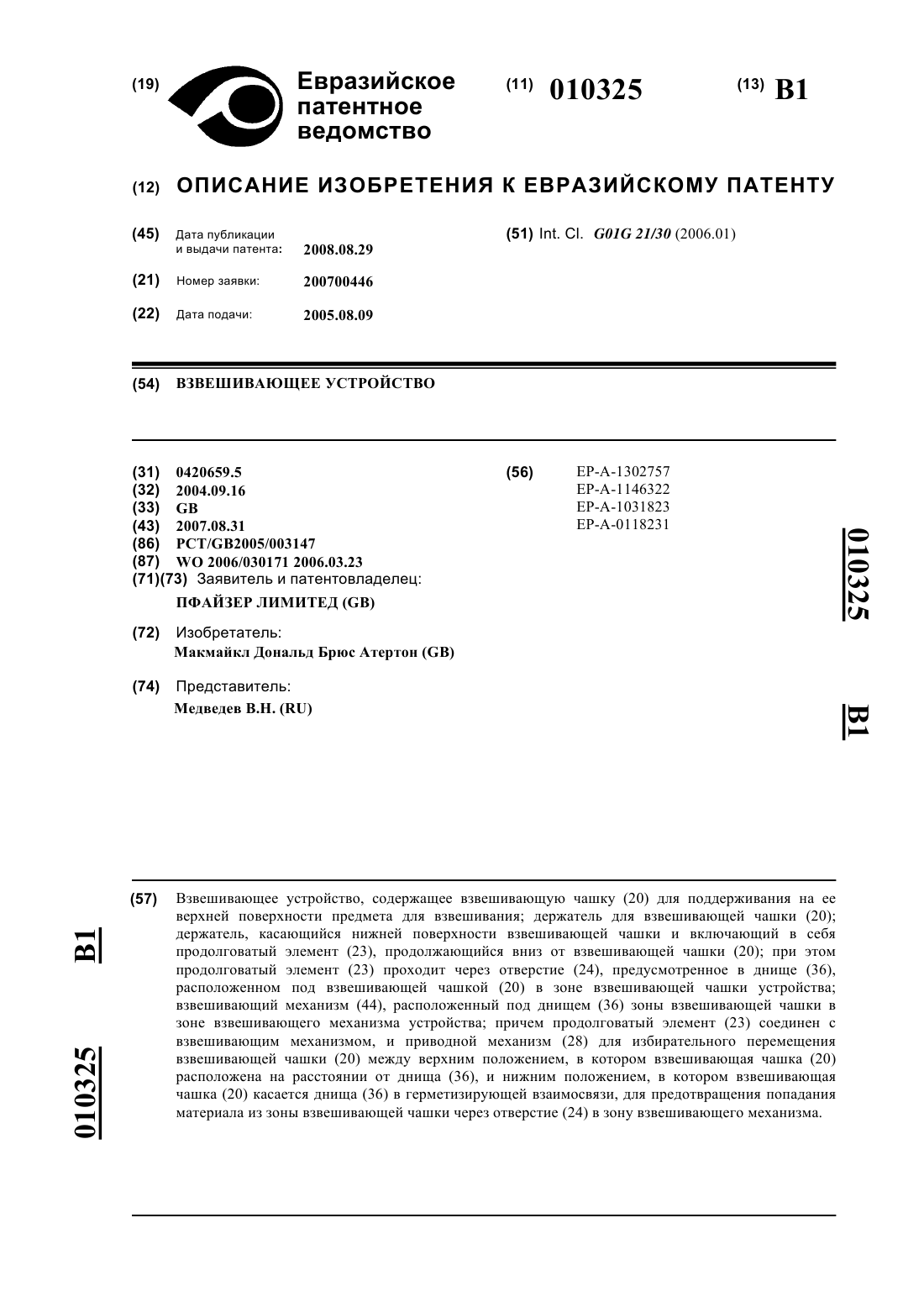
011053 Настоящее изобретение относится к способу определения веса груза, несомого подъемником подъемного устройства, при этом определение веса базируется по меньшей мере на одном смещении вверх и одном смещении вниз подъемника, причем подъемник смещается посредством гидропривода, входящего в гидравлическую систему, при этом при смещении вверх и вниз подъемника давление в гидравлической системе измеряется с помощью датчика давления, тем самым предоставляется сигнал давления, и параметр, зависящий от положения подъемника, измеряется с помощью измерительного прибора, тем самым предоставляется сигнал положения и вес груза определяется на основе сигнала давления и сигнала положения. В DE 3820757A1 описан способ и устройство для определения веса груза, несомого трехопорным прицепным устройством тягача. Определение веса базируется на сигнале давления от датчика давления в гидравлической системе трехопорного прицепного устройства и сигнале положения от датчика положения, регистрирующего положение трехопорного прицепного устройства. Измерения выполняются посредством поднимания и опускания трехопорного прицепного устройства на маленькое расстояние около заданного положения измерения, в котором зависимость измеренных сигналов от расстояния до центра силы тяжести груза является малым, и пропорциональность сигнала давления является высокой. Тем самым, вклад в результат взвешивания гистерезиса, вызванного трением, может быть уменьшен. В течение операции измерения гидропривод трехопорного прицепного устройства приводится в движение назад и вперед с постоянной, относительно малой скоростью, чтобы минимизировать динамические вклады давления в результат взвешивания. Однако это устройство требует усложненной гидравлической системы клапанов, адаптированной для управления гидроприводом на постоянной скорости, и, поэтому, является дорогостоящей. Дополнительно, определение веса должно выполняться в заданном положении трехопорного прицепного устройства, что может являться недостатком. В DE4328148A1 также описан способ и устройство для определения веса груза, несомого трехопорным прицепным устройством тягача, в силу чего сигнал давления и сигнал положения предоставляются как в вышеописанном устройстве. Общий коэффициент трения для некоторого трехопорного прицепного устройства определяется на основе измеренных сигналов давления в течение операции поднимания и опускания трехопорного прицепного устройства, несущего произвольный груз, в силу чего упомянутые сигналы давления измеряются при некоторой высоте подъема. Впоследствии, постоянная передача для упомянутого трехопорного прицепного устройства вычисляется на основе определенного общего коэффициента трения вместе с сигналом давления, измеренным при поднимании или опускании известного груза на прицепном устройстве. В течение операции устройства взвешивания вес груза на прицепном устройстве может определяться из сигнала давления, измеренного при поднимании или опускании прицепного устройства, и на основе определенного общего коэффициента трения и постоянной передачи для прицепного устройства. Общий коэффициент трения и постоянная передача могут также вначале определяться как функция вертикального положения прицепного устройства, так что груз впоследствии может взвешиваться при любом вертикальном положении прицепного устройства. Однако согласно этому устройству гидропривод также должен управляться на постоянной скорости, чтобы минимизировать динамические вклады давления в результат взвешивания, и требуется усложненная и дорогостоящая гидравлическая система клапанов.US 5929389 дополнительно описывает способ и устройство для определения веса груза, несомого подъемным устройством, где сигнал давления и сигнал положения предоставляются как в вышеописанных устройствах. В течение операции измерения подъемное устройство перемещается вверх и вниз, по существу, с фиксированной скоростью, и наборы значений сигнала давления и сигнала положения регистрируются процессорным средством по меньшей мере в двух разных положениях подъемного устройства. Впоследствии процессорное средство определяет вес груза из зарегистрированных наборов значений и из заданных геометрических измерений связующего устройства с помощью уравнения для равновесия сил и крутящего момента, действующих на связующую часть. Однако это устройство также требует дорогостоящей системы клапанов для обеспечения постоянной скорости. Цель настоящего изобретения - предоставить способ определения веса, который может быть реализован с устройством простой конструкции. В виду этой цели сигнал положения регистрируется как функция времени, зависящий от ускорения параметр определяется на основе изменения сигнала положения, и определение веса выполняется в зависимости от упомянутого зависящего от ускорения параметра. Таким образом, операция взвешивания может выполняться с помощью смещения вверх и вниз подъемника без необходимости поддерживать постоянную скорость гидравлического цилиндра или подъемника, так как определение веса выполняется с учетом зависящего от ускорения параметра; другими словами, силы, происходящие от возможного ускорения груза и элементов подъемного устройства в течение операции взвешивания, учитываются при определении веса груза. Следовательно, может применяться система с механически простой структурой, чтобы реализовывать способ определения веса согласно изобретению. В предпочтительном варианте осуществления сигнал давления регистрируется как функция времени, зависящий от скорости параметр определяется как функция времени на основе изменения сигнала-1 011053 положения, выбирается момент времени в течение смещения вверх подъемника, и выбирается момент времени в течение смещения вниз подъемника, так что значения зависящего от скорости параметра к соответствующим выбранным моментам времени являются, по существу, равными, и определение веса выполняется в зависимости от значений сигнала давления, зарегистрированного для соответствующих выбранных моментов времени, и в зависимости от значений зависящего от ускорения параметра, определенного для соответствующих выбранных моментов времени. Тем самым, зависящие от скорости силы вязкостного трения подъемного устройства, имеющие противоположное направление при смещении вверх и вниз подъемника, соответственно, могут, по существу, уравновешиваться, так как определение веса базируется на измерениях, выполняемых при равных, но противоположных, скоростях подъемника. Следовательно, результат определения веса может быть, по существу, независимым от таких зависящих от скорости сил вязкостного трения и, поэтому, более точным. В одном варианте осуществления определение веса выполняется в зависимости от значений сигнала положения, зарегистрированного для соответствующих выбранных моментов времени. Тем самым, геометрическое распределение веса подъемного устройства и груз, несомый подъемником, могут учитываться при определении веса, и результат его может, следовательно, быть более точным. В одном варианте осуществления определение веса выполняется в зависимости от значений зависящего от скорости параметра, определенного для соответствующих выбранных моментов времени. Таким образом, дополнительно, зависящие от скорости параметры могут учитываться, когда определяется вес груза. Такие параметры могут включать в себя потерю напора вследствие трения в трубах гидравлической системы, так как скорость потока гидравлической текучей среды в и из гидропривода в гидравлической системе зависит от скорости поршня в цилиндре гидропривода. В предпочтительном варианте осуществления в течение одного смещения вверх и одного смещения вниз подъемника скорость и ускорение подъемника определяются на основе изменения сигнала положения и представляются пользователю в реальном времени посредством устройства вывода, пользователь управляет подъемником с помощью гидравлического клапана, чтобы поддерживать скорость, по существу, в пределах некоторого диапазона и ускорение, по существу, ниже некоторого предела, определяются два периода времени в течение упомянутого одного смещения вверх и упомянутого одного смещения вниз подъемника, соответственно, в течение этих периодов времени определенная скорость находится в пределах упомянутого диапазона, и определенное ускорение находится ниже упомянутого предела, и вес груза определяется на основе средних значений сигналов ускорения и давления в течение упомянутых периодов времени, соответственно. Так как скорость и ускорение, тем самым, ограничены в течение операции измерения, требования, налагаемые на процессор, адаптированный, чтобы выполнять определение веса, могут быть невысоки. Например, если сигнал положения и сигнал давления измеряются посредством компьютера, может применяться более маленькая частота замеров. Тем самым, может требоваться менее дорогостоящий компьютер. В одном варианте осуществления вес груза определяется на основе средних значений сигнала положения в течение упомянутых периодов времени, соответственно. Тем самым, геометрическое распределение веса подъемного устройства и груза, несомого подъемником, могут учитываться при определении веса, и результат его может, следовательно, быть более точным. В одном варианте осуществления вес груза определяется на основе средних значений сигнала скорости в течение упомянутых периодов времени. Этим способом, дополнительно, зависящие от скорости параметры, как упоминалось выше, могут учитываться, когда определяется вес груза. В предпочтительном варианте осуществления общий коэффициент трения подъемного устройства определяется на основе одного смещения вверх и одного смещения вниз подъемника, несущего груз,который должен быть взвешен, и определение веса базируется на определенном общем коэффициенте трения. Так как трение подъемного устройства может изменяться с течением времени вследствие факторов, таких как износ и изменяющиеся условия смазки, и дополнительно может зависеть от веса груза,поднимаемого подъемником, определение общего коэффициента трения подъемного устройства на основе смещений подъемника, несущего фактический груз, который должен быть взвешен, будет давать результатом намного более точное определение веса, чем, если такой коэффициент трения будет определен только один раз для подъемного устройства с помощью смещения произвольного груза и использоваться для каждого последующего определения веса. В одном варианте осуществления сигнал положения предоставляется с помощью расходомера, измеряющего поток гидравлической текучей среды через трубу для гидропривода. Тем самым, точный сигнал положения может получаться простым и экономичным способом. Дополнительно, расходомер может легко устанавливаться в существующее подъемное устройство посредством вставки в трубу гидропривода. В предпочтительных вариантах осуществления сигналы от датчика давления и от измерительного прибора, предоставляющего параметр, зависящий от положения подъемника, регистрируются как выборочные значения в компьютере, и компьютер вычисляет сигнал положения и сигнал давления на основе этого и определяет вес груза. В одном варианте осуществления операция взвешивания автоматически выполняется с помощью-2 011053 процессора при инициировании пользователем, в силу чего гидропривод управляется процессором, чтобы смещать подъемник один раз в направлении вверх и один раз в направлении вниз. Тем самым, операция взвешивания облегчается, так как требуется меньше взаимодействия с пользователем. Это изобретение дополнительно относится к взвешивающему устройству для определения веса груза, несомого подъемником подъемного устройства, причем подъемник может смещаться с помощью гидропривода, входящего в гидравлическую систему подъемного устройства, причем взвешивающее устройство содержит процессор, адаптированный, чтобы определять вес на основе по меньшей мере одного смещения вверх и одного смещения вниз подъемника, причем датчик давления адаптирован, чтобы измерять давление в гидравлической системе подъемного устройства и, тем самым, предоставлять сигнал давления, и измерительный прибор адаптирован, чтобы измерять параметр, зависящий от положения подъемника подъемного устройства, и, тем самым, предоставлять сигнал положения, и процессор адаптирован, чтобы определять вес груза на основе сигнала давления и сигнала положения, предоставляемых датчиком давления и измерительным прибором, соответственно, в течение смещения вверх и вниз подъемника. Система отличается тем, что процессор адаптирован, чтобы регистрировать сигнал положения как функцию времени, чтобы определять зависящий от ускорения параметр на основе изменения сигнала положения и чтобы определять вес в зависимости от упомянутого зависящего от ускорения параметра. Тем самым, достигаются вышеупомянутые преимущества. В одном предпочтительном варианте осуществления процессор адаптирован, чтобы регистрировать сигнал давления как функцию времени, чтобы определять зависящий от скорости параметр как функцию времени на основе изменения сигнала положения, чтобы выбирать момент во времени в течение смещения вверх подъемника и выбирать момент во времени в течение смещения вниз подъемника, так что значения зависящего от скорости параметра для соответствующих выбранных моментов во времени являются, по существу, равными, и чтобы выполнять определение веса в зависимости от значений сигнала давления, зарегистрированного для соответствующих выбранных моментов времени, и в зависимости от значений зависящего от ускорения параметра, определенного для соответствующих выбранных моментов времени. Тем самым, достигаются вышеупомянутые преимущества. В одном варианте осуществления процессор адаптирован, чтобы выполнять определение веса в зависимости от значений сигнала положения, зарегистрированного для соответствующих выбранных моментов во времени. Тем самым, достигаются вышеупомянутые преимущества. В одном варианте осуществления процессор адаптирован, чтобы выполнять определение веса в зависимости от значений зависящего от скорости параметра, определенного для соответствующих выбранных моментов во времени. Тем самым, достигаются вышеупомянутые преимущества. В одном предпочтительном варианте осуществления процессор адаптирован, чтобы определять, в течение одного смещения вверх и одного смещения вниз подъемника, скорость и ускорение подъемника на основе сигнала положения, взвешивающее устройство содержит устройство вывода, адаптированное,чтобы представлять определенную скорость и ускорение пользователю в реальном времени, процессор адаптирован, чтобы информировать пользователя, через устройство вывода, управлять подъемником,чтобы поддерживать скорость, по существу, в пределах некоторого диапазона и ускорение, по существу,ниже некоторого предела, причем процессор адаптирован, чтобы определять два периода времени в течение упомянутого одного вверх и упомянутого одного вниз смещения подъемника, соответственно, в течение этих периодов времени определенная скорость находится в пределах упомянутого диапазона, и определенное ускорение ниже упомянутого предела, и процессор адаптирован, чтобы определять вес груза на основе средних значений сигналов ускорения и давления в течение упомянутых периодов времени, соответственно. Тем самым, достигаются вышеупомянутые преимущества. В одном варианте осуществления процессор адаптирован, чтобы определять вес груза на основе средних значений сигналов положения и скорости в течение упомянутых периодов времени, соответственно. Тем самым, достигаются вышеупомянутые преимущества. В одном варианте осуществления процессор адаптирован, чтобы определять общий коэффициент трения подъемного устройства на основе одного вверх и одного вниз смещения подъемника, несущего груз, который должен быть взвешен, и чтобы определять вес на основе определенного общего коэффициента трения. Тем самым, достигаются вышеупомянутые преимущества. В одном варианте осуществления расходомер предоставляется, чтобы измерять поток гидравлической текучей среды через трубу для гидропривода и, тем самым, предоставлять сигнал положения. Тем самым, достигаются вышеупомянутые преимущества. В одном предпочтительном варианте осуществления взвешивающее устройство содержит блок,имеющий сквозную трубную часть, адаптированную, чтобы подходить линейно в трубе для гидропривода подъемного устройства, и расходомер и датчик давления интегрируются в блоке и располагаются,чтобы измерять поток через и давление в, соответственно, трубной части. Тем самым, установка взвешивающего устройства в подъемном устройстве значительно облегчается, так как должен монтироваться только упомянутый блок, и никакие отдельные датчики не должны встраиваться в подъемное устройство в различных положениях, например в гидравлический цилиндр.-3 011053 В одном предпочтительном варианте осуществления процессор является компьютером, адаптированным, чтобы регистрировать, как выборочные значения, сигналы от датчика давления и от измерительного прибора, предоставляющего параметр, зависящий от положения подъемника, и компьютер адаптирован, чтобы вычислять сигнал положения и сигнал давления на основе зарегистрированных сигналов от датчика давления и от измерительного прибора, и чтобы определять вес груза на основе этого. Тем самым, достигаются вышеупомянутые преимущества. В одном варианте осуществления процессор адаптирован, чтобы автоматически выполнять операцию взвешивания при инициировании пользователем, в силу чего гидропривод управляется с помощью процессора, чтобы смещать подъемник один раз в направлении вверх и один раз в направлении вниз. Тем самым, достигаются вышеупомянутые преимущества. Это изобретение дополнительно относится к подъемному устройству, содержащему взвешивающее устройство, как описано выше. В одном варианте осуществления подъемное устройство является вильчатым погрузчиком. Это изобретение далее будет описываться более подробно с помощью примеров вариантов осуществления со ссылкой на очень схематические чертежи, на которых: фиг. 1 показывает схему взвешивающего устройства согласно этому изобретению, установленного в подъемном устройстве,фиг. 2 показывает пример динамического коэффициента трения и его зависимость от скорости перемещения,фиг. 3-6 показывают пример графиков, показывающих силу поршня, ускорение, скорость и положение, соответственно, как функцию времени для подъемного устройства,фиг. 7 показывает скорость поднимания и ускорение в общей варианте осуществления способа взвешивания,фиг. 8 показывает скорость поднимания и ускорение в другом варианте осуществления способа взвешивания,фиг. 9 и 10 показывают сводку формул. Фиг. 1 показывает подъемник 1 подъемного устройства 2, обеспеченного взвешивающим устройством 3, согласно изобретению. В показанном варианте осуществления подъемное устройство 2 имеет форму вильчатого погрузчика, который показан только частично. Подъемник 1 состоит из вилки и выполнен с возможностью смещения в вертикальном направлении с помощью каретки 4, обеспеченной роликами 5, катящимися между противоположными вертикальными сторонами стойки 6 способом, известным самим по себе. Подъемник 1 приводится в действие с помощью гидропривода 7 в форме вертикального цилиндра 8, в котором поршень 9 может смещаться. Поршень 9 монтируется на стержне 10 поршня,верхний конец которого несет цепной ролик 11. Цепь 12 фиксирована на ее первом конце 13 к фиксированной раме 14 подъемного устройства 2, проходит через цепной ролик 11 и фиксируется на ее втором конце 15 к каретке 4. Следовательно, смещение поршня 9 при некоторой скорости в цилиндре 8 вызывает смещение каретки 4 и, поэтому, подъемника 1 при вдвое большей упомянутой скорости. В целях вычисления, первая часть цепи 12 обозначается b и имеет длину b, и вторая часть цепи 12 обозначается с и имеет длину с, в силу чего длина каждой части b, с цепи изменяется с вертикальным положением каретки 4, как показано на фиг. 1. Гидропривод 7 приводится в действие с помощью гидравлической текучей среды, доставляемой и выпускаемой через трубу 16, соединенную с гидравлическим клапаном 17, который может управляться с помощью ручки 18, чтобы доставлять гидравлическую текучую среду из гидравлического насоса 19 в трубу 16 или чтобы выпускать гидравлическую текучую среду из трубы 16 в резервуар 20, в силу чего подъемник 1 поднимается или опускается, соответственно. В трубе 16 трубная часть 21 подходит линейно и располагается через блок 22, содержащий расходомер 23, адаптированный, чтобы измерять поток через трубную часть 21, и датчик 24 давления, адаптированный, чтобы измерять давление в трубной части 21. Блок 22 соединяется с компьютером 25, адаптированным, чтобы выполнять определение веса на основе выборочных значений сигналов, принимаемых от расходомера 23 и датчика 24 давления в блоке 22. Компьютер 25 соединяется с устройством 26 вывода, адаптированным, чтобы представлять определенные значения пользователю. Взвешивающее устройство 3 содержит блок 22, компьютер 25, устройство 26 вывода и не показанное устройство ввода, с помощью которого компьютер 25 может управляться. Однако взвешивающее устройство 3 может вместо того, чтобы обеспечиваться своими собственными устройствами ввода/вывода, иметь интерфейс, адаптированный, чтобы соединяться с устройствами ввода/вывода, принадлежащими подъемному устройству 2. Принцип определения уравновешенной массы базируется на возможности уравновешивать ошибки измерения, вызываемые трениями в механическом подъемном устройстве. Это может достигаться посредством разрешения подъемнику, на котором груз 27 располагается, выполнять направленное вверх и последующее направленное вниз перемещение. Так как силы, требуемые для подъема груза 27, равны сумме гравитационных и фрикционных сил,сумма сил во время направленного вниз перемещения будет равна гравитационным силам минус фрик-4 011053 ционные силы. Половина суммы направленных вверх и вниз сил является, таким образом, выражением веса груза без фрикционных влияний, так как они уравновешиваются. Это применяется при условии, что трения в направлениях вверх и вниз являются одними и теми же,и что никакое ускорение массы не происходит, когда силы измеряются. При измерении ускорения силы ускорения и измененные условия трения, вызываемые согласно второму закону Ньютона о движении,могут компенсироваться. Если, например, цепь 12 нагружается посредством большей силы вследствие ускорения подъемника 1, подшипник цепного ролика 11 реагирует с более высокой силой трения. Чтобы гарантировать вязкостные трения с равными размерами в обоих направлениях, силы измеряются при одной и той же скорости вверх и вниз. На фиг. 2 показан пример динамического коэффициента тренияss(v) и его зависимость от скорости перемещения v. Видно, что трение является наибольшим в состоянии покоя. Это также называется статическим трением или прилипанием. В случае возрастающей скорости, трение значительно падает до уровня, называемого динамическим сухим трением или кулоновским трением, которое не зависит от скорости перемещения. Если поверхности смазаны, трение будет увеличиваться вместе со скоростью, что называется динамическим мокрым трением или вязкостным трением. Так как распределение массы подъемного устройства изменяется параллельно с высотой поднимания, например, вследствие измененной величины масла в гидравлическом цилиндре 8 или изменения в положении цепи 12 вокруг цепного ролика 11, измеряется положение гидравлического поршня 9, так как является возможным определять изменения в распределении массы, базируясь на этом. Вертикально действующие силы и положение гидравлического поршня 9 могут определяться посредством измерения давления и потока гидравлической текучей среды, скомбинированного с информацией об области гидравлического поршня 9. Скорость и ускорение определяются компьютером 25 как первая и вторая производная по времени положения поршня 9, вычисленного из выборочного сигнала положения, предоставленного с помощью расходомера 23. Сигнал положения может устанавливаться в исходное положение посредством опускания вилки до основного уровня. Вместо использования расходомера сигнал положения может также предоставляться с помощью других известных средств, например лазерного прибора измерения расстояния, размещенного рядом с подъемником или рядом с гидравлическим цилиндром, или ультразвукового прибора измерения расстояния, размещенного, например, внутри гидравлического цилиндра. Базовые физические значения, измеряемые прямо или косвенно, таким образом, - это:s - положение поршня [м]. В качестве примера, если F, a, v и s рассматриваются как функции времени, вильчатый погрузчик с коэффициентом трения ss(v), как описано выше, также как параметры А = 0,002150 [м 2], площадь поршня;k = 4,000 [кг/м], вес цепи на метр;ml = 670,2 [кг], масса груза,могут иметь графики с таким же внешним видом, как показано на фиг. 3-6. В последующем будет продемонстрировано, как могут строиться подходящие уравнения для использования в компьютерной программе для определения веса груза 27 на подъемнике 1 подъемного устройства 2. Дается следующее общее назначение параметров:ma = эквивалентная массовая постоянная для подъемного устройства [кг];pr = перепад давления из датчика давления в цилиндр [Па]; А = площадь поршня [м 2];x = расстояние до центра силы тяжести для груза+вилок+каретки [м];F = сила на нижней стороне поршня [Н];mh = ml+mg+mc, массовая правая сторона шкива, (умноженная на 2) [кг];s = положение стержня поршня [м];v = (ds/dt) скорость стержня поршня [м/с]; а = (d2s/dt2) ускорение стержня поршня [м/с 2];z = вращательная скорость расходомера [r/с];n = вращательное ускорение расходомера [r/с 2];l = объем на оборот расходомера [м 3/r];k = вес цепи на метр [кг/м];= плотность (ро) гидравлического масла [кг/м 3];b = длина части b цепи в произвольном положении s поршня [м]; с = длина части с цепи в произвольном положении s поршня [м]; с 0 = измеренная начальная длина части цепи с опущенными вилками (s = 0) [м];d = потеря напора вследствие трения (гидравлическое сопротивление трубы) из датчика давления в гидравлический цилиндр [Пас/м 3];Q = поток, количество масла в секунду [м 3/с]. Следующее назначение параметров дается для направленного вверх и вниз перемещения:Fo = сила на нижней стороне поршня, вверх [Н];Fn = сила на нижней стороне поршня, вниз [Н];mvo = ms+mbo, массовая левая сторона шкива, вверх [кг];mvn = ms+mbn, массовая левая сторона шкива, вниз [кг];mho = ml+mg+mco, массовая правая сторона шкива, вверх [кг];mhn = ml+mg+mcn, массовая правая сторона шкива, вниз [кг];men = ошибка в формуле аппроксимации, вниз [кг]. Дается следующее специальное назначение параметров (для пустого подъемника) для определения площади А поршня посредством калибровки.pn = перепад давления из датчика давления в цилиндр [Па].-6 011053 Даются следующие базовые уравнения для подъемного устройства:- потеря напора вследствие трения (гидравлическое сопротивление трубы) [Пас/м 3]. Давление р и поток Q, измеренные при ослабленном соединении на цилиндре.- перепад давления из датчика давления в цилиндр [Па].- положение стержня поршня [м].- скорость стержня поршня [м/с] или- скорость стержня поршня [м/с].- ускорение стержня поршня [м/с 2]. с=с 0-2s - длина части с цепи [м].- эквивалентная массовая постоянная для подъемного устройства [кг].Fo=(po-pr)A-moo(g+ao) - сила на нижней стороне гидравлического поршня при поднимании [Н].Fn=(pn+pr)A-mon(g+an) - сила на нижней стороне гидравлического поршня при опускании [Н]. Определение массы ml груза В модели вильчатого погрузчика, фиг. 1, рассматривается направленная вверх сила Fo, требуемая,чтобы поднимать поршень и массы, помещенные на него, чтобы определять вес массы ml груза. Сила описывается как аппроксимация с помощью уравнения в котором значения моментов инерции и угловые скорости рассматриваются как незначительные в отношении к эквивалентной массовой постоянной для подъемного устройства и возможного груза. Следует отметить, однако, что, так как вышеуказанное уравнение является аппроксимацией, является возможным построить другие уравнения, которые могут равным образом применяться, чтобы давать удовлетворительные результаты. Масса "правой стороны шкива" может быть отделена и, следовательно, Конечно, чтобы достичь удобной и аппроксимативной формулы, последний член отбрасывается,давая результатом ошибку, которой можно пренебречь, как будет показано позже: Так как mb+2mc=mk+mc, получается следующее уравнение, которое применимо к направленному вверх перемещению вилки: Соответственно, посредством аналогичных рассмотрений как выше, можно понять, что следующее уравнение применимо к направленному вниз перемещению: Следует отметить, что в уравнении (4) и (5) все переменные за исключением pr вычисляются со знаПри рассмотрении как вверх, так и вниз перемещения вилки уравнения (4) и (5) могут быть сложе ны: и масса ml груза может быть отделена, тем самым давая Определение эквивалентной массовой постоянной ma (0-калибровка) Если веса элементов, требуемых, чтобы вычислить определенную выше эквивалентную массовую постоянную ma для подъемного устройства, не известны, упомянутая массовая постоянная может быть найдена с помощью калибровки взвешивающего устройства, так называемой 0-калибровки. Так как ma не изменяется, эта калибровка должна делаться только один раз для подъемного устройства и может затем использоваться для всех последующих операций взвешивания. Калибровка выполняется посредством выполнения нормальной операции взвешивания, которая будет описываться подробно ниже, но с ml=0,т.е. без груза на подъемнике 1. Тем самым, ml=0 подставляется в уравнение (7), соответствуя пустому подъемнику: Для направленного вверх и вниз перемещения эквивалентная массовая постоянная ma для подъемного устройства тогда равна Определение площади А поршня (полномасштабная калибровка) Если точная площадь А поршня не, или не точно, известна, она может определяться более точно посредством так называемой полномасштабной калибровки. Посредством использования уравнения (4) для направленного вверх перемещения подъемника два-8 011053 жды, с и без ml (пустой подъемник), соответственно, и затем вычитания их, получается уравнение (9) ниже,для подъемного устройства с и без груза предполагаются равными, и, следовательно, скорости поднимания должны быть равными для обеих выполняемых операций поднимания. Параметры po, pr, ao,moo, mco применяются для перемещения с ml на подъемнике, тогда как poz, prz, aoz, mooz, mcoz применяются для перемещения без ml (пустой подъемник). Еслидля подъемного устройства с и без груза равны, вынося А вне скобок, и отделяя (1+) в качестве независимого члена, чтобы исключить , выражение может быть преобразовано в Соответственно, посредством использования уравнения (5) для направленного вниз перемещения получается следующее уравнение: Параметры pn, pr, an, mon, mcn применяются для перемещения с ml на подъемнике, тогда как pnz, prz,anz, monz, monz применяются для перемещения без ml (пустой подъемник). Чтобы исключить , уравнения (10) и (11) складываются Тем самым,для подъемного устройства с и без груза и для перемещения вверх и вниз подъемника предполагаются равными, и, следовательно, скорости подъемника должны быть равны для всех четырех выполняемых операций поднимания, т.е. направленного вверх перемещения подъемника дважды, с и безml, и направленного вниз перемещения подъемника дважды, с и без ml. Площадь А поршня определяется следующим образом: Определение ошибки me Ранее, в уравнении (3), налагалась ошибка для направленного вверх перемещения. Полная ошибка для направленного вверх и вниз перемещения, таким образом, составляет В качестве примера, полная ошибка me, в случае масс mvo=100 кг, moo=2 кг и ускорения ao=0,1 м/с 2,также как масс mvn=100 кг, mon=2 кг и ускорения an=-0,3 м/с 2, также как коэффициента трения =0,05, это которой для большинства целей можно пренебречь. Определение коэффициента тренияПереписывание уравнения (4) и (5) дает Из-за равной скорости и равной массы груза для направленного вверх и вниз перемещения, каждая сторона второго из вышеописанных двух уравнений может быть вычтена из каждой стороны первого из вышеуказанных двух уравнений, соответственно, тем самым, формируя числитель на каждой стороне следующего уравнения, и впоследствии каждая сторона вышеуказанных двух уравнений может быть сложена, соответственно, тем самым, формируя знаменатель на каждой стороне следующего уравнения: в силу чего коэффициент тренияотделяется посредством редукции на левой стороне уравнения. Если mco=mcn, то moo=mon, и получается простое уравнение в котором решение для- это в котором решение для- это Альтернативный способ для определения массы ml груза Коэффициент тренияопределяется как ранее с помощью уравнения (16) или (17).подставляется в уравнение (18) ниже, которое является переписанной версией уравнения (2). Вставка Fo=(po-pr)A-moo(g+ao) в уравнение (2) дает Соответственно, для направленного вниз перемещения получается следующее уравнение: Операция взвешивания Общий вариант осуществления состоит в выполнении операции взвешивания, в которой груз сначала поднимается и впоследствии опускается. С помощью этой операции взвешивания выполняются измерения давления и потока, и в конце процесса результаты анализируются и обрабатываются, чтобы вычислить массу груза. Положение, скорость и ускорение гидравлического поршня могут вычисляются из измеренного потока. Как показано на фиг. 7, показывающей скорость поднимания и ускорение, операция взвешивания может быть разделена на девять фаз от начала до конца. Нажать "начать" 1. v=0 и a=0 2. v0 и a0 3. v0 и a=0 4. v0 и a0 5. v=0 и a=0 6. v0 и a0 7. v0 и a=0 8. v0 и a0 9. вычислить массу"остановить" операцию взвешивания Следует отметить, что в целях иллюстрации ускорение показано как постоянное внутри каждой фазы; однако, там, где происходят изменения скорости, ускорение не должно быть постоянным; фактически, обычно оно будет изменяться, так как подъемник обычно управляется вручную в течение взвешивания. Операция взвешивания инициируется посредством нажатия кнопки "начать", где после выполняется непрерывное измерение гидравлического давления p и потока Q, также как вычисление положения s поршня, скорости v и ускорения a в течение большей части процесса (фаза 1 по 8). Вычисления выполняются с помощью отношений В фазах ускорения, как поднимания, так и опускания, т.е. фазах 2, 4, 6 и 8, значения p, s, v и a сохраняются. В конце операции взвешивания (фаза 9) две приблизительно равные скорости vo и vn поршня(см. фиг. 7) выбираются для поднимания и опускания, соответственно. Эти скорости также относятся к положениям поршня, ускорениям и гидравлическим давлениям, so, ао, po, sn, an, pn для поднимания и опускания, соответственно. С помощью математических отношений, moo=(с 0-2so)k и mcn=(с 0-2sn)k дополнительно вычисляются, выражая массы части с цепи, также как moo=soA и mon=snA, равные массам масла в гидравли- 11011053 ческом цилиндре при двух скоростях vo и vn. Наконец, вычисляется что получается посредством комбинирования отношений Если mcomcn, значения po, pn, pr, ao, an, mco, mcn, moo и mon подставляются в уравнение (17), и затем вычисляется . Если mco=mcn, упомянутые значения подставляются в уравнение (16). При условии, что эквивалентная массовая постоянная для подъемного устройства ma известна, такие же значения как выше, также как вычисленное значение , подставляются в уравнение (7), в силу чего вычисляется масса ml груза. Следует отметить, однако, что если mco=mcn, значение и не должно вычисляться в этом общем варианте осуществления, так какумножается на (mco-mcn)=0. Результат может быть представлен подходящим образом, и операция взвешивания может завершаться (фаза 9). В альтернативном варианте осуществления для определения массы ml груза коэффициент тренияопределяется как в общем варианте осуществления, описанном выше, но он впоследствии подставляется в уравнение для либо поднимания, уравнение (18), либо опускания, уравнение (19), чтобы вычислять вес. В другом варианте осуществления для определения массы ml груза операция взвешивания инициируется посредством нажатия кнопки "начать", где после выполняется непрерывное измерение гидравлического давления p и потока Q, также как вычисление положения s поршня, скорости v и ускорения a в продолжении большей части процесса (фаза 1 по 8). В случае поднимания пользователь информируется посредством визуального индикатора устройства 26 вывода о заданном интервале скорости (см. фиг. 8). Когда скорость поднимания находится в пределах этого интервала и ускорение меньше чем заданное максимальное значение (интервал ускорения на фиг. 8), и минимальное количество измерений, например 10, выполняющее эти критерии, было найдено и сохранено, пользователь будет уведомлен визуально и акустически, чтобы завершить операцию поднимания, так что опускание может начаться. В случае опускания пользователь также информируется о таком же интервале скорости, и когда ускорение, меньше чем такое же максимальное значение как в случае поднимания, и соответствующее количество измерений, выполняющих эти критерии, было найдено и сохранено, пользователь будет уведомлен визуально и акустически, чтобы завершить опускание. Это означает, что некоторое количество измерений для р, s, v и a теперь было выбрано и сохранено как для поднимания в фазе 3, так и опускания в фазе 7. В фазе 9 масса груза вычисляется и операция взвешивания завершается. Вычисления выполняются согласно одному из способов в вышеописанных вариантах осуществления, причем различие состоит в том, что so, vo, ao, po и sn, vn, an, pn - это средние значения сохраненных измерений для поднимания и опускания, соответственно. Дополнительные варианты осуществления Хотя определение веса в вышеописанных вариантах осуществления выполняется с помощью компьютера, части или все определение веса может выполняться с помощью других средств, например, с помощью традиционных схем управления. В этой связи, описанное определение зависящего от ускорения параметра должно толковаться в широком смысле; не говоря уже о том, что это значение определяется в компьютерной программе, оно может, например, быть в форме генерирования зависящего от ускорения электрического сигнала в электрической схеме управления, или оно может даже быть интегрировано в функцию некоторого компонента такой схемы управления. В вильчатом погрузчике, показанном на фиг. 1, подъемник 1 может дополнительно располагаться центрально вокруг горизонтальной оси. Угол наклона подъемника 1 может тогда регистрироваться в компьютере с помощью датчика и учитываться при определении веса. Аналогично, угол наклона всего вильчатого погрузчика в отношении к горизонтальной плоскости может регистрироваться и учитываться при определении веса. Дополнительно, хотя взвешивающее устройство согласно этому изобретению в вышеизложенном описывается для использования в некотором хорошо известном типе вильчатого погрузчика, специалист должен понимать, что описанное взвешивающее устройство может модифицироваться для использования в других типах вильчатого погрузчика. Уравнения, данные выше, подходят для показанного устройства, но они могут быть модифицированы для использования в разных устройствах согласно принципам, объясненным выше. Хотя уравнения, данные выше, не говоря уже о силах, проистекающих из ускорений, также учитывают дополнительные силы, проистекающие из положения подъемника, т.е. распределение веса элементов подъемного устройства и груза, и силы, проистекающие от скорости таких элементов и подъемника,например, потери напора вследствие трения в трубе между датчиком давления и гидравлическим цилиндром, такие дополнительные силы могут исключаться из вычислений, насколько эти вклады от таких сил могут быть проигнорированы для фактической цели. Например, может предполагаться, что вязкостные трения от смещения вверх и вниз подъемника равны, хотя может иметься различие в скоростях подъем- 12011053 ника при смещении вверх и вниз. Аналогично, распределение веса элементов, таких как цепь, может предполагаться постоянным. Специалист должен понимать, как построить соответствующие уравнения для определения веса в таких случаях на основе принципов, данных выше. Возможно, уравнения, полученные этим способом, могут быть более простыми, чем те, что даны выше. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения веса груза, несомого подъемником подъемного устройства, в котором определение веса базируется по меньшей мере на одном смещении вверх и одном смещении вниз подъемника, при этом подъемник смещается посредством гидропривода, входящего в гидравлическую систему,причем в течение смещения вверх и вниз подъемника давление в гидравлической системе измеряется с помощью датчика давления, предоставляя сигнал давления, а параметр, зависящий от положения подъемника, измеряется с помощью измерительного прибора, предоставляя сигнал положения, причем вес груза определяется на основе сигнала давления и сигнала положения, отличающийся тем, что сигнал положения регистрируют как функцию времени, посредством этого зависящий от ускорения параметр определяют на основе изменения сигнала положения и определение веса выполняют в зависимости от упомянутого зависящего от ускорения параметра. 2. Способ по п.1, отличающийся тем, что сигнал давления регистрируют как функцию времени, зависящий от скорости параметр определяют как функцию времени на основе изменения сигнала положения, причем выбирают момент времени в течение смещения вверх подъемника и выбирают момент времени в течение смещения вниз подъемника, так что значения зависящего от скорости параметра для соответствующих выбранных моментов во времени, по существу, равны, и определение веса выполняют в зависимости от значений сигнала давления, зарегистрированного для соответствующих выбранных моментов во времени, и в зависимости от значений зависящего от ускорения параметра, определенного для соответствующих выбранных моментов во времени. 3. Способ по п.2, отличающийся тем, что определение веса выполняют в зависимости от значений сигнала положения, зарегистрированного для соответствующих выбранных моментов времени. 4. Способ по п.2 или 3, отличающийся тем, что определение веса выполняют в зависимости от значений зависящего от скорости параметра, определенного для соответствующих выбранных моментов времени. 5. Способ по п.1, отличающийся тем, что в течение одного вверх и одного вниз смещения подъемника скорость и ускорение подъемника определяют на основе изменения сигнала положения и представляют пользователю в реальном времени посредством устройства вывода, при этом пользователь с помощью гидравлического клапана управляет подъемником, чтобы поддерживать скорость, по существу, в пределах некоторого диапазона и ускорение, по существу, ниже некоторого предела, посредством этого определяют два периода времени, в течение упомянутого одного вверх и упомянутого одного вниз смещения подъемника, причем в течение этих периодов времени определенная скорость находится в пределах упомянутого диапазона, и определенное ускорение находится ниже упомянутого предела, и при этом вес груза определяют на основе средних значений сигналов ускорения и давления в течение упомянутых периодов времени. 6. Способ по п.5, отличающийся тем, что вес груза определяют на основе средних значений сигналов положения и скорости в течение упомянутых периодов времени. 7. Способ по любому из пп.1-6, отличающийся тем, что общий коэффициент трения подъемного устройства определяют на основе одного вверх и одного вниз смещения подъемника, несущего груз, который должен быть взвешен, при этом определение веса базируется на определенном общем коэффициенте трения. 8. Способ по любому из пп.1-7, отличающийся тем, что сигнал положения формируют с помощью расходомера, измеряющего поток гидравлической текучей среды через трубу для гидропривода. 9. Способ по любому из пп.1-8, отличающийся тем, что сигналы от датчика давления и от измерительного прибора, предоставляющего параметр, зависящий от положения подъемника, регистрируют как выборочные значения в компьютере, при этом компьютер вычисляет сигнал положения и сигнал давления и на основе этого определяет вес груза. 10. Способ по любому из пп.1-9, отличающийся тем, что операцию взвешивания автоматически выполняют с помощью процессора при инициировании пользователем, при этом гидропривод управляется процессором, чтобы смещать подъемник один раз в направлении вверх и один раз в направлении вниз. 11. Взвешивающее устройство для определения веса груза, несомого подъемником подъемного устройства, причем подъемник выполнен с возможностью смещения посредством гидропривода, входящего в гидравлическую систему подъемного устройства, причем взвешивающее устройство содержит процессор, адаптированный, чтобы определять вес на основе по меньшей мере одного вверх и одного вниз смещения подъемника, датчик давления, адаптированный, чтобы измерять давление в гидравлической системе подъемного устройства и, тем самым, предоставлять сигнал давления, и измерительный прибор,адаптированный, чтобы измерять параметр, зависящий от положения подъемника подъемного устройст- 13011053 ва и, тем самым, предоставлять сигнал положения, и процессор, который адаптирован, чтобы определять вес груза на основе сигнала давления и сигнала положения, предоставленных датчиком давления и измерительным прибором, соответственно, в течение смещения вверх и вниз подъемника, отличающийся тем,что процессор адаптирован, чтобы регистрировать сигнал положения как функцию времени, чтобы определять зависящий от ускорения параметр на основе изменения сигнала положения, и чтобы определять вес в зависимости от упомянутого зависящего от ускорения параметра. 12. Взвешивающее устройство по п.11, отличающееся тем, что процессор адаптирован, чтобы регистрировать сигнал давления как функцию времени, определять зависящий от скорости параметр как функцию времени на основе изменения сигнала положения и выбирать момент времени в течение смещения вверх подъемника и выбирать момент времени в течение смещения вниз подъемника, так что значения зависящего от скорости параметра для соответствующих выбранных моментов времени, по существу, равны, и чтобы выполнять определение веса в зависимости от значений сигнала давления, зарегистрированного для соответствующих выбранных моментов времени, и в зависимости от значений зависящего от ускорения параметра, определенного для соответствующих выбранных моментов времени. 13. Взвешивающее устройство по п.12, отличающееся тем, что процессор адаптирован, чтобы выполнять определение веса в зависимости от значений сигнала положения, зарегистрированного для соответствующих выбранных точек во времени. 14. Взвешивающее устройство по п.12 или 13, отличающееся тем, что процессор адаптирован, чтобы выполнять определение веса в зависимости от значений зависящего от скорости параметра, определенного для соответствующих выбранных точек во времени. 15. Взвешивающее устройство по п.11, отличающееся тем, что процессор адаптирован, чтобы определять в течение одного вверх и одного вниз смещения подъемника скорость и ускорение подъемника на основе сигнала положения, при этом взвешивающее устройство содержит устройство вывода, адаптированное, чтобы представлять определенные скорость и ускорение пользователю в реальном времени, причем процессор адаптирован, чтобы информировать пользователя через устройство вывода, управлять подъемником, чтобы поддерживать скорость, по существу, в пределах некоторого диапазона и ускорение, по существу, ниже некоторого предела, причем процессор адаптирован, чтобы определять два периода времени, в течение упомянутого одного вверх и упомянутого одного вниз смещения подъемника соответственно, в течение этих периодов времени определенная скорость находится в пределах упомянутого диапазона, и определенное ускорение находится ниже упомянутого предела и при этом процессор адаптирован, чтобы определять вес груза на основе средних значений сигналов ускорения и давления в течение упомянутых периодов времени, соответственно. 16. Взвешивающее устройство по п.15, отличающееся тем, что процессор адаптирован, чтобы определять вес груза на основе средних значений сигналов положения и скорости в течение упомянутых периодов времени, соответственно. 17. Взвешивающее устройство по любому из пп.11-16, отличающееся тем, что процессор адаптирован, чтобы определять общий коэффициент трения подъемного устройства на основе одного вверх и одного вниз смещения подъемника, несущего груз, который должен быть взвешен, и чтобы определять вес на основе определенного общего коэффициента трения. 18. Взвешивающее устройство по любому из пп.11-17, отличающееся тем, что расходомер предоставляется, чтобы измерять поток гидравлической текучей среды через трубу для гидропривода и, тем самым, предоставлять сигнал положения. 19. Взвешивающее устройство по п.18, отличающееся тем, что взвешивающее устройство содержит блок, имеющий сквозную трубную часть, адаптированную чтобы подходить линейно в трубе для гидропривода подъемного устройства, причем расходомер и датчик давления интегрированы в блок и выполнены с возможностью измерять поток через и давление, соответственно, в трубной части. 20. Взвешивающее устройство по любому из пп.11-19, отличающееся тем, что процессор относится к компьютеру, адаптированному, чтобы регистрировать как выборочные значения, сигналы от датчика давления и от измерительного прибора, предоставляющего параметр, зависящий от положения подъемника, при этом компьютер адаптирован, чтобы вычислять сигнал положения и сигнал давления на основе зарегистрированных сигналов от датчика давления и от измерительного прибора и чтобы определять вес груза на основе этого. 21. Взвешивающее устройство по любому из пп.11-20, отличающееся тем, что процессор адаптирован, чтобы автоматически выполнять операцию взвешивания при инициировании пользователем, в силу чего гидропривод управляется с помощью процессора, чтобы смещать подъемник один раз в направлении вверх и один раз в направлении вниз. 22. Подъемное устройство, содержащее взвешивающее устройство по любому из пп.11-21. 23. Подъемное устройство по п.22, отличающееся тем, что подъемное устройство является вильчатым погрузчиком.
МПК / Метки
МПК: G01G 19/08
Метки: определения, взвешивающее, подъемником, устройства, способ, несомого, веса, груза, устройство, подъемного
Код ссылки
<a href="https://eas.patents.su/19-11053-sposob-opredeleniya-vesa-gruza-nesomogo-podemnikom-podemnogo-ustrojjstva-i-vzveshivayushhee-ustrojjstvo.html" rel="bookmark" title="База патентов Евразийского Союза">Способ определения веса груза, несомого подъемником подъемного устройства, и взвешивающее устройство</a>
Устройство для определения вертикального положения груза под водой и система управления размещением под водой гру3а

Номер патента: 10755
Опубликовано: 30.10.2008
Авторы: О`CУЛЛИВАН-БАСКЕТ Дженелл, Пецик Майкл, Бенсон Дэн Т.
МПК: E21B 29/12, B66D 1/48
Метки: определения, водой, вертикального, устройство, управления, гру3а, размещением, груза, положения, система
Формула / Реферат:
1. Устройство для определения вертикального положения груза под водой, подвешенного к гибкому грузовому тросу, содержащее корпус, средство передачи инофрмации о положении груза, позиционное колесо, размещенное, по меньшей мере частично, внутри корпуса и взаимодействующее с гибким тросом лебедки, и датчик положения колеса, установленный с возможностью генерации сигнала, соответствующего угловому повороту позиционного колеса. 2. Устройство по п.1,...
Взвешивающее устройство
Номер патента: 10325
Опубликовано: 29.08.2008
Автор: Макмайкл Дональд Брюс Атертон
МПК: G01G 21/30
Метки: устройство, взвешивающее
Формула / Реферат:
1. Взвешивающее устройство, включающее в себя взвешивающую чашку для поддерживания на ее верхней поверхности предмета для взвешивания; продолговатый элемент, присоединенный к ней; причем продолговатый элемент проходит через отверстие и присоединяет взвешивающую чашку к взвешивающему механизму; причем предусмотрено отверстие в перегородке, выполненной между зоной взвешивающей чашки и зоной взвешивающего механизма; и устройство привода для...
Устройство для размещения груза в заданном положении под водой с повышенной точностью и способ управления таким устройством
Номер патента: 4201
Опубликовано: 26.02.2004
Автор: Бернар Франсуа
МПК: E21B 41/04, B63C 11/42
Метки: устройством, заданном, размещения, груза, повышенной, устройство, управления, точностью, таким, положении, водой, способ
Формула / Реферат:
1. Устройство (50) для размещения предмета (43) в заданном положении под водой, причем устройство снабжено маяком для передачи акустического излучения и множеством движителей (56(i), i=1, 2 ... I, при этом I является целым числом) для управления позиционированием упомянутого устройства относительно упомянутого заданного положения под водой, отличающееся тем, что устройство снабжено измерителем (258) скорости звука для непрерывного измерения...
Устройство для измерения и индикации веса транспортного средства
Номер патента: 5196
Опубликовано: 30.12.2004
Автор: Павловский Юрий Валерьевич
МПК: B60P 5/00, G01G 19/08
Метки: устройство, веса, индикации, средства, транспортного, измерения
Формула / Реферат:
1. Устройство для измерения и индикации веса транспортного средства, содержащее систему тензометрических датчиков, каждый из которых по каналу передачи данных связан со средством обработки информации на базе микропроцессора, снабженным средством индикации результатов измерения, отличающееся тем, что тензометрический датчик установлен в пневмосистеме каждой подушки каждой подвески транспортного средства, а средство обработки информации со...
Выпускающее устройство, контейнер для выпускающего устройства и способ изготовления выпускающего устройства
Номер патента: 3977
Опубликовано: 25.12.2003
Авторы: Ван Дююрен Мариус Корстиан, Ван Дер Клау Гвидо Петрус Йоханнес, Бакс Барт Ян
МПК: B67D 1/08, B22D 19/00
Метки: изготовления, способ, устройства, контейнер, выпускающее, выпускающего, устройство
Формула / Реферат:
1. Выпускающее устройство для напитка, содержащее охлаждающее средство, отводящий стержень с краном для выпуска жидкости, содержащий первый и второй каналы, сообщенные друг с другом рядом с краном для выпуска жидкости, направляющую трубку, проходящую через отводящий стержень, при этом, по меньшей мере, во время использования отводящая линия проходит через второй канал, соединена или приспособлена соединяться на одном конце с контейнером для...
Предыдущий патент: Способ для определения ориентаций приемника
Следующий патент: Байесова сеть в применении к геологии и геофизике
Случайный патент: Нецеолитные нанокомпозитные материалы для твердых кислотных катализаторов