Адаптивный способ ослабления сейсмического шума и помехи



Формула / Реферат
1. Способ для фильтрации шума из дискретных сейсмических сигналов с шумами, содержащий стадии, при осуществлении которых принимают сигналы, представляющие сейсмическую энергию, отраженную и/или преломленную от земной структуры, используя множество сейсмических приемников, и фильтруют принятые сигналы, используя, по меньшей мере частично, адаптивный фильтр, который ослабляет сигналы, в котором отсутствуют заранее заданные характеристики распространения; указанная стадия фильтрации содержит этапы, при осуществлении которых задают, по меньшей мере, две системы условий, при этом первая система определяет требуемый отклик, а вторая система определяет характеристики распространения сигналов, подлежащих сохранению, при этом отсутствует влияние первой системы на вторую систему, и адаптируют коэффициенты указанного фильтра при соблюдении указанных, по меньшей мере, двух независимых систем условий с тем, чтобы оптимизировать выходные данные фильтра для сигналов, в которых отсутствуют характеристики распространения сигналов, подлежащих сохранению.
2. Способ по п.1, в котором на стадии адаптации оптимизируют функцию стоимости, представляющую мощность выходного сигнала фильтра и коэффициент передачи белого шума фильтром.
3. Способ по п.2, в котором в качестве функции стоимости используют взвешенную сумму мощности выходного сигнала фильтра и коэффициента передачи белого шума фильтром.
4. Способ по п.3, в котором предусматривают возможность регулирования в функции стоимости относительного веса мощности выходного сигнала и коэффициента передачи шума.
5. Способ по п.1, в котором характеристики распространения сигнала определяют с помощью его временного и пространственного спектрального содержания.
6. Способ по п.1, в котором характеристики распространения сигнала определяют с помощью его волнового числа и частоты.
7. Способ по п.1, в котором характеристики распространения сигнала задают в виде области или в виде областей в пространстве частот-волновых чисел.
8. Способ по п.1, в котором характеристики распространения сигналов включают в себя некоторое количество направлений в пространстве частот-волновых чисел.
9. Способ по п.1, в котором условия определяют матрицу ограничений, содержащую, по меньшей мере, два взаимно ортогональных подпространства, при этом первое подпространство определяет требуемый отклик фильтра, а второе подпространство определяет характеристики распространения сигналов, подлежащих сохранению, указанную матрицу используют в течение процесса адаптации коэффициентов фильтра.
10. Способ по п.1, в котором условия определяют матрицу ограничений при использовании вектора невозмущенного отклика и главных собственных векторов корреляционной матрицы, выполненной из управляющих векторов, задающих, по меньшей мере, одну область пространства частот-волновых чисел, в которой сохраняют сигналы.
11. Способ по п.1, в котором условия задают так, что сигналы с заранее заданными характеристиками распространения подавляются фильтром.
12. Способ по п.1, в котором на указанной стадии фильтрации дополнительно задают дополнительные системы условий, при этом одна система условий сдвигает требуемый отклик фильтра до нуля, а другая система условий задает характеристики распространения сигналов, подлежащих подавлению фильтром.
13. Способ по п.1, в котором используют фильтр, содержащий М локальных во времени фильтров, при этом из указанных фильтров образуют блок фильтров, где М является целым числом, равным или больше двух.
14. Способ по п.13, включающий в себя стадию, при осуществлении которой умножают М отфильтрованных оценок на временные вырезающие функции.
15. Способ по п.14, в котором используют временные вырезающие функции, отвечающие условию, что только соседние окна перекрываются.
16. Способ по п.14, в котором функцию стоимости минимизируют, используя приближение, заключающееся в том, что сумма, взвешенная вырезающими функциями, выходных сигналов соседних фильтров из М фильтров является одинаковой при приложении одного и того же сигнала во временных областях, где перекрываются указанные вырезающие функции.
17. Способ по п.1, содержащий дополнительную стадию, при осуществлении которой разделяют коэффициенты фильтра на фиксированную часть и адаптивную часть.
18. Способ по п.1, содержащий дополнительную стадию, при осуществлении которой разделяют сигналы, по меньшей мере, на два частотных диапазона, фильтруют, по меньшей мере, один из указанных, по меньшей мере, в двух частотных диапазонах и до дополнительной обработки рекомбинируют указанные частотные диапазоны, чтобы восстановить ослабленные шумом сейсмические сигналы.
19. Способ по п.1, в котором дискретные сигналы с шумами, используемые как входные, записывают от отдельных сейсмических датчиков до любых способов группирования.
20. Способ по п.1, содержащий дополнительные стадии, при осуществлении которых располагают, по меньшей мере, один сейсмический источник и некоторое количество сейсмических приемников в соответствующих местах на земле, в море или в окружающих условиях промежуточной зоны; возбуждают указанный, по меньшей мере, один источник для распространения энергии через подземные формации и используют указанные приемники для измерения энергии в виде записей отдельных датчиков, преобразуют указанные записи отдельных датчиков в дискретные сейсмические сигналы; и передают указанные сигналы в качестве входных к фильтру.

Текст
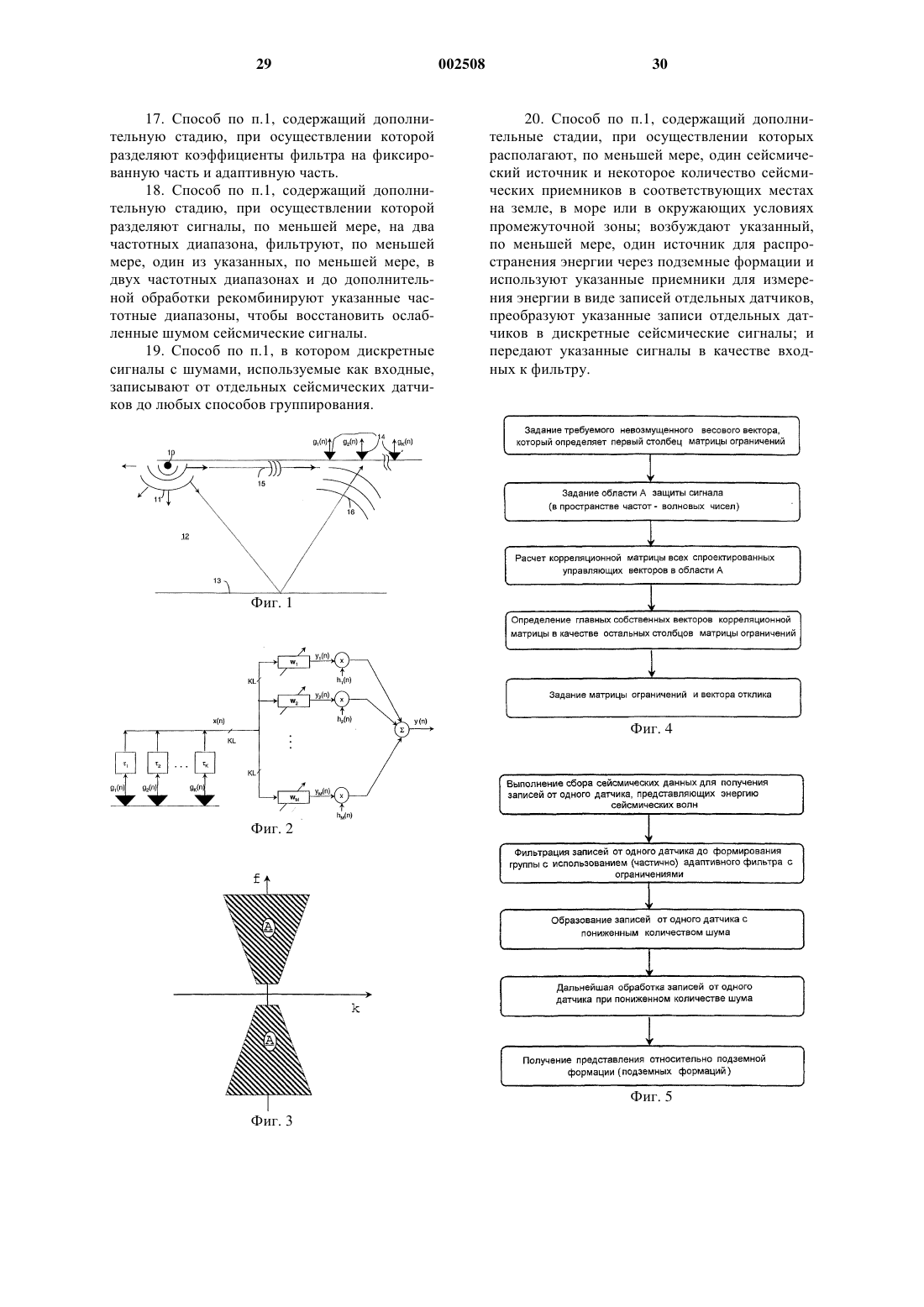
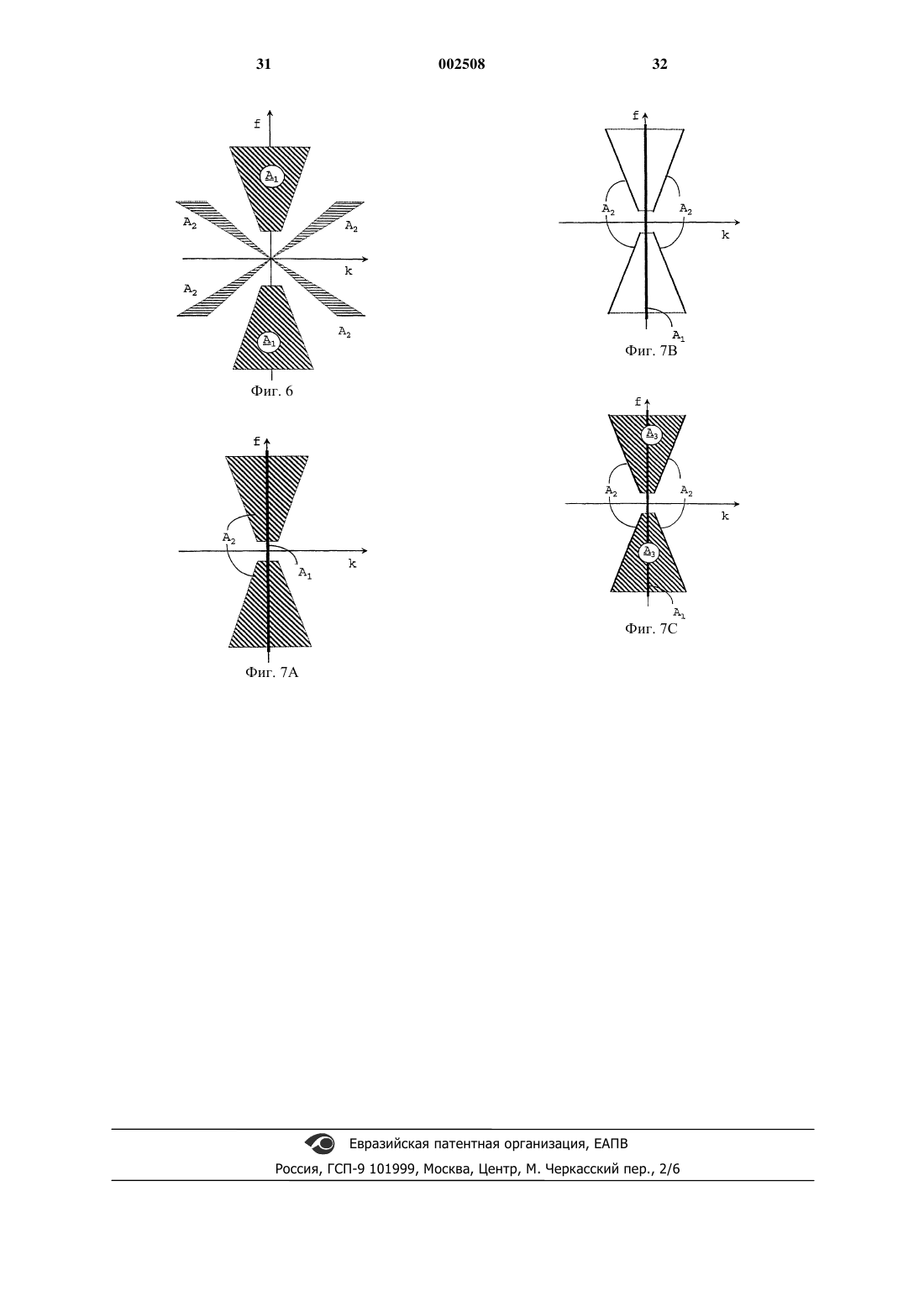
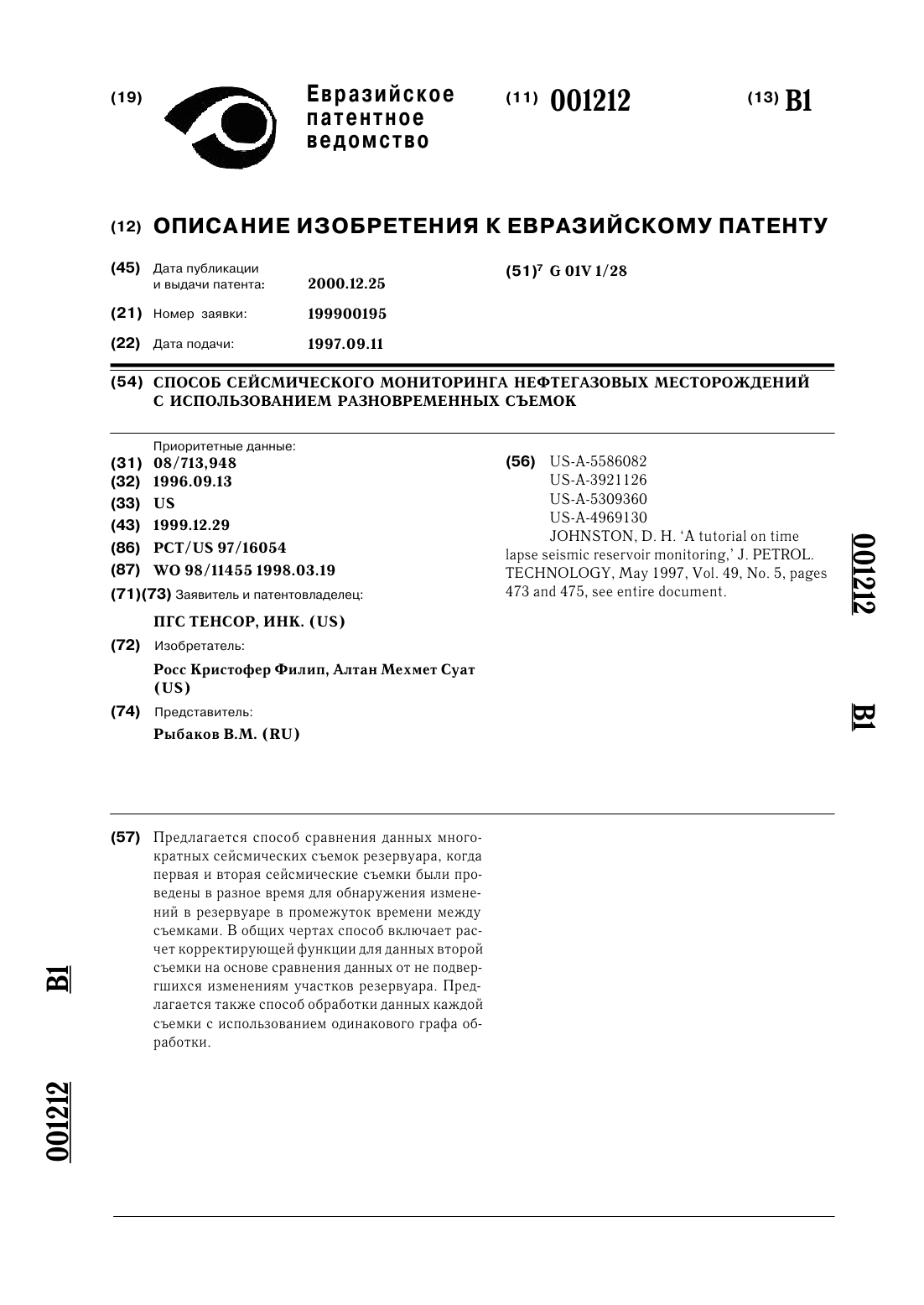
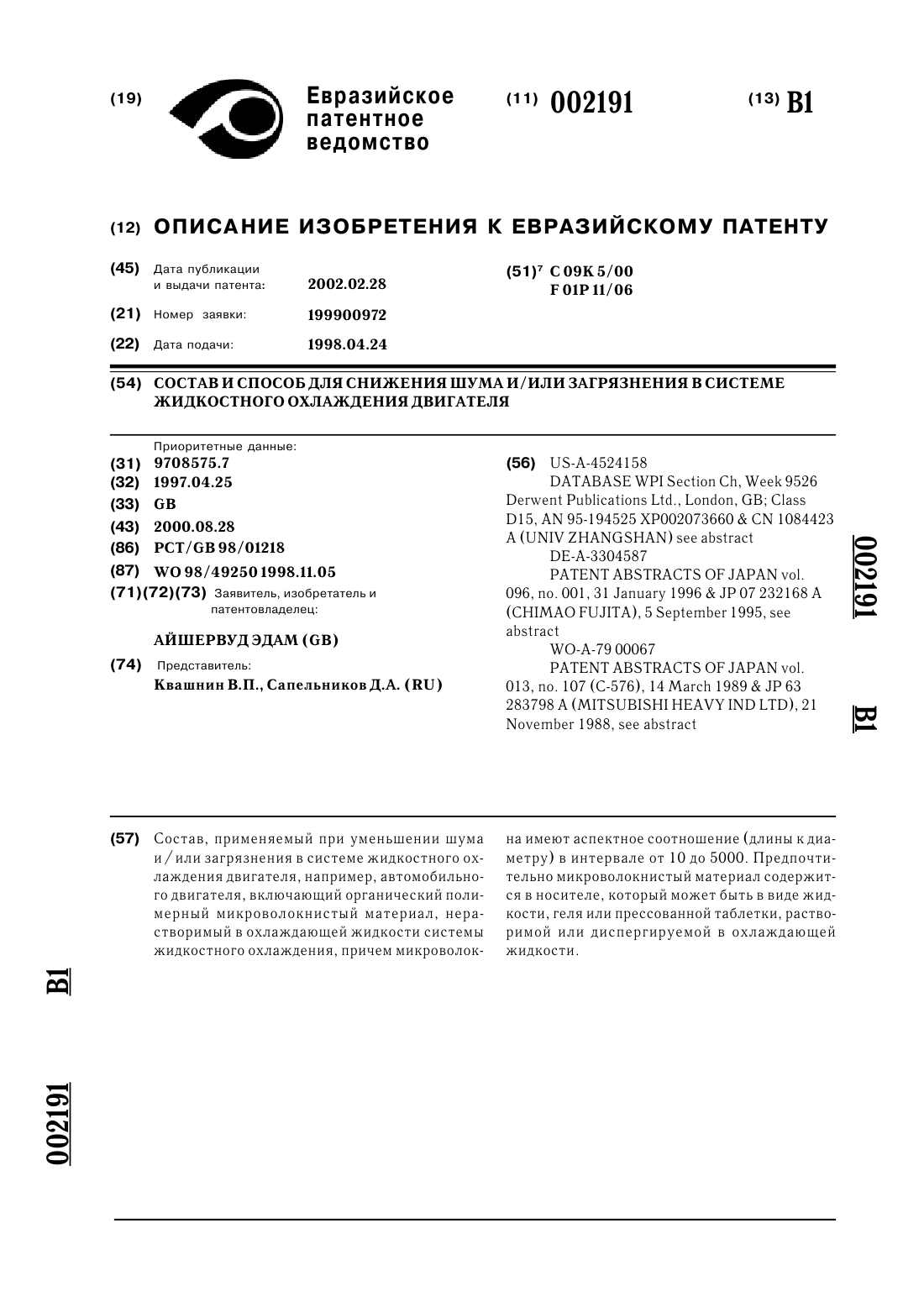
1 Это изобретение относится к сбору сейсмических данных и к способам обработки сейсмических данных. Оно относится к процессу для фильтрации когерентного шума и помехи из сейсмических данных с помощью адаптивного способа формирования диаграммы направленности. В другом аспекте оно относится к адаптивной фильтрации когерентного шума и помехи из сейсмических данных при сохранении сейсмических сигналов с произвольным спектральным содержанием в пространстве частотволновых чисел. В еще одном аспекте оно относится к адаптивной фильтрации когерентного шума и помехи, которая является нестационарной во времени и по пространству. В дополнительном аспекте оно относится к адаптивной фильтрации когерентного шума и помехи, которые регистрируются решеткой датчиков в присутствии возмущений. Предшествующий уровень техники При сейсмической разведке сейсмический источник возбуждает сейсмические волны на или вблизи поверхности земли. Примерами сейсмических источников являются взрывные источники, вибрационные устройства и пневматические пушки. Эти волны распространяются через почву и отражаются, преломляются и подвергаются дифракции формациями внутри земли, и их можно обнаружить на поверхности земли посредством некоторого количества датчиков (обычно геофонов или гидрофонов). Каждый такой приемник контролирует сейсмическое волновое поле, которое затем записывается. Данные, принятые приемником и после этого записанные, в целом называются трассой. Совокупность трасс сохраняют для дальнейшей обработки, чтобы получить информацию относительно нижних горизонтов земли. Такую информацию обычно интерпретируют, чтобы установить возможность присутствия углеводородов или чтобы проконтролировать изменения в породах, содержащих углеводороды. В большинстве случаев сейсмические данные, наряду с сейсмическими отраженными сигналами, содержат когерентные шумовые сигналы. Эти шумовые сигналы, в дальнейшем называемые шумом, взаимодействуют с расшифрованными сейсмическими сигналами и ухудшают качество изображений нижних горизонтов, которые могут быть получены при дальнейшей обработке. Поэтому желательно подавить шум, который присутствует в записанных данных, до их обработки с целью построения изображения. При наземной сейсмической разведке вероятными источниками, генерирующими преобладающий шум, являются поверхностная волна и воздушные волны, и они могут привести к существенному ухудшению качества данных. При морской сейсмической разведке существенные источники шума определяются энергией, распространяющейся в виде волн, захва 002508 2 ченных в водяном столбе и в приповерхностных слоях, а также шумом от зыби и шумом от волн вспучивания, который является следствием распространения волн на всем протяжении сейсмоприемных кос приемных устройств. Иные источники когерентного шума в морской сейсмической разведке включают в себя проходящие суда, другие суда, собирающие сейсмические данные в окрестности, или любые буровые установки вблизи разведочной площади. Важной особенностью так называемого когерентного шума, присутствующего в сейсмических данных, является расстояние, на котором шум проявляется как когерентный. Во многих случаях шум является когерентным только на расстоянии нескольких метров. В других случаях, хотя шум большей частью является когерентным, существует импульсный шум по пространству. В таких случаях применение способов фильтрации, для которых характерен большой пространственный интервал, подобных известному способу фильтрации в пространстве частот-волновых чисел, приводит к появлению нежелательных искажений, которые после обработки и получения изображения ошибочно идентифицируют как сейсмические явления. Еще одна особенность шума, присутствующего в сейсмических данных, заключается в том, что он часто является нестационарным во времени, т.е. его характеристики изменяются как функция времени. В течение последних лет были предложены разнообразные способы с использованием основной концепции, заключающейся в приложении идей адаптивной обработки сигналов к задаче подавления когерентного шума в сейсмических данных. В статье Booker and Ong, "Multipleconstraint adaptive filtering". Geophysics, vol. 36,pp. 498-509, 1971, получен алгоритм для многоканальной последовательной во времени обработки данных, в котором наложены заданные начальные ограничения на многоканальный фильтр для известных источников сигнала или шума при одновременной адаптации фильтра с целью минимизации действия поля неизвестногоисточника. Использованы ограничения для ряда направлений просмотра, при этом направления просмотра должны быть точно заданы. В Международной заявке WO 97/25632(Ozbek) на выдачу патента описан класс адаптивных способов обработки сигналов для ослабления дисперсионного нестационарного и паразитного когерентного шума в сейсмических данных при известности фазы и амплитуды возмущений. Разработанные способы могут быть отнесены к многоканальному адаптивному подавлению помех. Поскольку свободный от сигнала эталон шума нелегко получить при сборе сейсмических данных, разнообразные способы предварительной обработки предложены для того, чтобы образовать каналы с эталонами ко 3 герентного шума. В однокомпонентной версии способа разность времени поступления волны к датчикам (кажущуюся скорость) и пространственно-временную когерентность используют в качестве критериев для выявления различий между сигналом и шумом. В многокомпонентной версии в качестве дополнительного вклада в различение используют поляризацию. После образования одного или некоторого количества каналов с эталонами шума в главном канале когерентный шум подавляют путем использования адаптирующих данные блоков многоканальных фильтров, рассчитанных способом наименьших квадратов. В патенте США 4556962 сделана попытка ослабить поверхностную волну, исходящую от поверхностного сейсмического источника, путем размещения датчика вблизи источника, чтобы обнаружить интерференционный шум. Интерференционный шум масштабируют,задерживают и суммируют с сигналами от более удаленной решетки геофонов и после этого осуществляют взаимную корреляцию с сигналом исходного источника колебаний. Кроме того, в этом патенте предложено использовать адаптивный фильтр с тем, чтобы видоизменить задержанный сигнал для более близкого соответствия сигналу, обнаруженному посредством более удаленной решетки геофонов. Однако поверхностная волна в большинстве случаев имеет неоднородный характер; вследствие дисперсии и рассеяния от приповерхностных аномалий поверхностная волна, измеренная в одной точке, существенно отличается по характеру от поверхностной волны, измеренной в другой точке, находящейся на большем расстоянии. Следовательно, поверхностная волна, измеренная вблизи источника, может существенно отличаться от поверхностной волны, принятой решеткой геофонов, и адаптивный фильтр может оказаться непригодным для разрешения этой проблемы. Кроме того, трудно измерить сейсмические сигналы (поверхностную волну) вблизи источника. Часто ближайшее расстояние составляет 100 м. Для близких измерений могут потребоваться более устойчивые к возмущениям датчики, а согласование характера обнаружителя должно быть важной подготовительной стадией. В патенте США 4890264 предложен способ для подавления неравномерно распределенного шума, создаваемого распространением поверхностной волны, ветром и оборудованием. Чувствительные в горизонтальной плоскости геофоны в некотором количестве распределены среди обычных, вертикально направленных геофонов. Выходные сигналы обнаружителей поверхностной волны используют в сочетании с адаптивным фильтром, чтобы устранить эффекты интерференции поверхностных волн. Этот способ для подавления поверхностной волны является по своей сути многокомпонентным 4 способом, и его нельзя использовать в сочетании с однокомпонентным сбором данных. В дополнение к этому в нем игнорируется факт,заключающийся в том, что энергия волн от некоторых сейсмических объектов также обнаруживается чувствительными в горизонтальном направлении геофонами, и это может вызвать подавление сигнала. В заявке Великобритании 2273358 А на выдачу патента линейно ограниченное адаптивное формирование диаграммы направленности и адаптивное формирование диаграммы направленности с компенсацией помех использованы для подавления поверхностной волны. При линейно ограниченном адаптивном формировании диаграммы направленности сигналы, измеренные с помощью решетки геофонов, фильтруют и суммируют с тем, чтобы сохранить сигналы,приходящие с предпочтительного направления,и наряду с этим подавить помехи, приходящие с других направлений. В случае применения адаптивной компенсации помех разность между моментами прихода сейсмических отражений и поверхностной волны используют для формирования основного и опорного каналов. Фильтрацию осуществляют, используя непрерывно адаптивный способ, такой как алгоритм на основе способа наименьших квадратов. Предложенной областью применения является сейсмическая разведка при бурении, когда диапазон горизонтального сейсмического сноса весьма небольшой, так что сейсмические отражения происходят почти при вертикальном угле падения, и можно эффективно получить серию данных от каждого места расположения источника и приемника, поскольку шарошечное буровое долото, используемое в качестве сейсмического источника, перемещается очень медленно. Поэтому статистика шума меняется очень медленно, что обеспечивает возможность сходимости стохастических градиентных алгоритмов, подобных алгоритму на основе способа наименьших квадратов. Однако в случае выполнения поверхностных сейсмических экспериментов присутствующая поверхностная волна часто является нестационарной и неоднородной. Следовательно, алгоритмы стохастических градиентных типов, такие, как алгоритм на основе способа наименьших квадратов, могут слишком медленно сходиться. В патенте США 5237538 предложен способ для удаления когерентного шума из сейсмических данных. В этом способе сначала определяют характеристики времени прихода шума. Далее задают и выделяют пространственно-временной сигнальный блок, а данные о временах прихода удаляют, чтобы выровнять шумовую последовательность. Затем из блока удаляют вариации амплитуд и времени. Оценивают когерентный шум, используя обычное занесение в стек. Используют одноканальный фильтр Винера для согласования оценки шума с 5 шумом в трассе данных, содержащей сигнал и шум. Имея выделенную отфильтрованную оценку шума, используют инверсные амплитудные скаляры, чтобы исключить эффект выравнивания амплитуд. После этого восстановленный сигнал перемещают в исходную сейсмическую запись. Этот конкретный способ для удаления когерентного шума из сейсмических данных является случаем применения хорошо известного способа, называемого компенсацией помех после формирователя диаграммы направленности. Он имеет некоторые конкретные недостатки, которые проявляются при применении его для ослабления поверхностной волны. Вопервых, сигнал всегда входит в оценку поверхностной волны, особенно в случае более коротких антенных решеток. Составляющая сигнала всегда присутствует в опорном канале, и она одинаково расположена во времени с сигналом в основном канале. Во-вторых, когда решетка может быть сделана более длинной, в поверхностной волне существует дисперсия, затрудняющая эффективное управление диаграммой направленности. При морской сейсмической разведке акустический источник генерирует волны, которые проходят через воду и проникают в грунт. Затем эти волны, отраженные или преломленные нижними горизонтами геологических формаций,проходят назад через воду и регистрируются с помощью длинной решетки гидрофонов, которую буксируют вблизи поверхности воды за судном для сейсмических исследований. Гидрофоны установлены на сейсморазведочных кабелях или в сейсмоприемных косах. Обычно буксируют 1-12 сейсмоприемных кос, при этом каждая имеет длину, составляющую несколько километров. Сейсмоприемные косы выполнены из секций, которые обычно могут быть длиной 100-200 м; каждая секция состоит из гидрофонов внутри наружной оболочки, которая может быть заполнена маслом, пеной или более твердым веществом. Напряженные тросы и распорки образуют внутренний каркас сейсмоприемной косы. Когда сейсмоприемные косы буксируют позади судна, шум создают разнообразные источники. Внезапный крен судна, особенно при сильных волнениях, вызывает колебания в напряженных тросах, которые взаимодействуют с соединителями и с маслонаполненной оболочкой, создавая волны вспучивания (или волны дыхания), которые распространяются по сейсмоприемным косам. Изменения давления, обнаруженные гидрофонами, добавляются и искажают обнаруженные сейсмические сигналы. По мере перемещения сейсмоприемной косы через воду турбулентность пограничного слоя вызывает флуктуации давления на наружной стенке оболочки, которые опять-таки передаются к гидрофонам. 6 Волны вспучивания могут также вызываться вихревым движением при эллиптическом перемещении воды вокруг сейсмоприемной косы, вызванном действием волны. Способ использования адаптивной обработки сигналов для ослабления волн вспучивания описан в патенте США 4821241. В нем предложено располагать в сейсмоприемной косе датчики механического напряжения совместно с гидрофонами. Датчики напряжения являются чувствительными к механическим напряжениям, приложенным к кабелю, но, по существу, не реагируют на акустические волны, распространяющиеся в жидкой среде. Сигнальные выходы датчиков напряжения объединяют с сигнальными выходами соответствующих, совместно расположенных гидрофонов, чтобы компенсировать паразитные сигналы, обусловленные волнами вспучивания. Еще один способ применения адаптивной обработки сигналов для ослабления волн вспучивания описан в патенте США 5251183. В этом патенте предложено использовать акселерометр, закрепленный между секцией подводящего кабеля и гидрофоном. Записывают сигналы акселерометра и гидрофона во время взрывов и между взрывами. В способе использованы контуры адаптивной обработки сигналов во время взрывов и сигналов между взрывами. С помощью контура адаптивной обработки сигналов между взрывами получают комплексные веса между взрывами из сигналов акселерометра между взрывами и сигналов гидрофона между взрывами. В контуре адаптивной обработки сигналов во время взрывов моделируется шум от волн вспучивания в сигналах гидрофона во время взрывов путем объединения комплексных весов между взрывами с сигналами акселерометра во время взрывов. Ослабления шума от волн вспучивания достигают путем вычитания модели шума от волн вспучивания во время взрывов из сигналов сейсмического датчика во время взрывов. В соответствии с настоящим изобретением предусмотрен способ для фильтрации шума из дискретных сейсмических сигналов с шумами,содержащий этапы, при осуществлении которых принимают сигналы, используя некоторое количество приемников; определяют характеристики распространения сигналов по отношению к местам расположения приемников; и фильтруют принятые сигналы, используя, по меньшей мере,частично адаптивный фильтр, такой, что ослабляются сигналы, имеющие иные характеристики распространения, чем заданные характеристики распространения. Стадия фильтрации включает в себя стадию задания, по меньшей мере, двух независимых систем условий (ограничений),при этом первая система определяет требуемый(не возмущенный) отклик, а вторая система определяет характеристики распространения сигналов, подлежащих сохранению, и стадию адап 7 тации коэффициентов фильтра при соблюдении независимых систем условий (ограничений) с тем, чтобы минимизировать (оптимизировать) выходные данные фильтра для сигналов с иными характеристиками распространения, чем заданные характеристики распространения. Что касается применения изобретения, то для выполнения процесса оптимизации выгодно определить веса фильтра или коэффициенты сигнально-зависимой части (корреляционной матрицы) и сигнально-независимой части. Сигнально-независимая часть обычно содержит ограничения, и их часто относят к матрице ограничений. Используя эту концепцию матрицы ограничений, существенную особенность изобретения можно описать как наличие внутри матрицы ограничений подпространства, которое определяется требуемым невозмущенным откликом, и одного подпространства, которое определяет области защищенного сигнала. Делая эти два подпространства ортогональными, можно получить веса фильтра, которые одновременно накладывают оба ограничения на отклик фильтра. Поскольку матрица ограничений эффективно уменьшает степени свободы фильтра,пригодного для процесса адаптации, эта особенность изобретения может быть описана как разделение суммарного числа степеней свободы на первую часть, которая пригодна для процесса адаптации, и вторую часть, которая используется для задания ограничений. Степени свободы,приписываемые ограничениям, разделены между теми ограничениями, которые определяют требуемый отклик, и второй системой, определяющей временное и/или пространственноспектральное содержание или характеристики распространения сигналов, подлежащих сохранению. Преимущество способа заключается в том,что он не ограничен случаем узкополосных сигналов, но также применим для широкополосных сейсмических сигналов, что приводит к фильтру, который изменяет свой отклик в зависимости от частоты входного сигнала (входных сигналов). Существенная особенность изобретения заключается в том, что, имея способ разделения требуемого невозмущенного отклика и ограничений, относящихся к области, на ортогональные подпространства, любой известный способ можно использовать для процесса адаптации. Такие адаптивные способы известны и описаны в литературе, например, алгоритм на основе способа наименьших квадратов, RLS, LSL, FTF и т.д. В соответствии с предпочтительным вариантом осуществления блок фильтров, содержащий локальные во времени и по пространству фильтры, использован в качестве адаптивного фильтра. Блок фильтров может быть определен как содержащий М локальных многоканальных 8 адаптивных фильтров с К каналами, каждый из которых имеет длину L. Для большинства применений число L коэффициентов равно трем или больше трех. Предпочтительно, число К каналов и отдельных фильтров М равно двум или более. Использование блока фильтров для ослабления шума в сейсмических сигналах описано в Международной заявке WO 97/25632 на выдачу патента. Однако в настоящем изобретении не требуется задавать опорный канал, чтобы рассчитать коэффициенты блока адаптированных фильтров. В процесс адаптации не вводят оценку шума. Следовательно, настоящий способ может быть применен в случае загрязненных шумом сейсмических сигналов, когда отсутствует независимое измерение или оценка имеющегося шума. В соответствии с одним аспектом изобретения коэффициенты фильтра ограничивают так, что его отклик соответствует отклику формирователя диаграммы направленности с заданным направлением просмотра. В соответствии с еще одним аспектом изобретения ограничения накладывают таким образом, что фильтр сохраняет сигналы из области направления просмотра или из заданных областей пространства частот-волновых чисел. Область можно задать заранее в зависимости от свойства сейсмических сигналов, более конкретно - от кажущейся скорости. Выбирая определенный предел скорости, например 1500 м/с,задают области в пространстве частот-волновых чисел. Дополнительный аспект изобретения включает в себя минимизацию функционала стоимости при использовании приближения,заключающегося в том, что сумма, взвешенная вырезающими функциями, выходных сигналов соседних фильтров из М фильтров является одинаковой при приложении одного и того же сигнала во временных областях, где перекрываются указанные вырезающие функции. Предпочтительно, способ включает в себя стадию умножения М отфильтрованных оценок с временными вырезающими функциями. Применение временных вырезающих функций и, следовательно, полученных в результате временных окон для объединенных составляющих гарантирует, что процесс фильтрации является локальным во времени и предоставляет возможность адаптивно удалять шум из сейсмических данных в соответствии с критерием глобальной оптимизации. Выбирающие данные, временные вырезающие функции предпочтительно определяют, исходя из двух условий, при этом первое условие заключается в том, что сумма по всем окнам в любой заданный момент времени равна единице, а второе условие заключается в том,что перекрываются только соседние окна. Выполнение этих условий гарантирует, что глобальная оптимизация отфильтрованных сигна 9 лов может быть решена путем использования приближения, в котором для суммы по всем моментам времени и по всем фильтрам и всех соседних фильтров функция ошибки соседнего фильтра заменяется функцией ошибки, связанной с самим фильтром. Применение разделяющих данные, временных окон позволяет разделить уравнение,необходимое для решения задачи оптимизации отфильтрованного сигнала. В соответствии с еще одним аспектом изобретения откликом фильтра можно управлять,используя параметр регуляризации. Параметр,как принято здесь, определяет относительный вес двух составляющих функционала стоимости. Одна из составляющих функционала стоимости может быть определена как мощность выходного сигнала, тогда как другая может быть охарактеризована как, по существу, коэффициент передачи белого шума блоком фильтров, т.е. как выходные данные фильтра при отклике на входные данные, некоррелированные во времени и по пространству. Сигнал с шумами может быть предварительно обработан до пропускания через средство адаптивной фильтрации путем разделения сигнала на частотные диапазоны с использованием восстанавливающего фильтра, например,квадратурного зеркального фильтра. Это позволяет уменьшить число точек данных, подлежащих обработке, и, кроме того, позволяет уменьшить число коэффициентов в средстве адаптивной фильтрации, поскольку эффективно сужается полоса исходного сигнала. Изобретение применимо к двумерной (2 Д) и к трехмерной сейсмической разведке (3 Д) и может быть использовано при наземной сейсмической разведке, морской сейсмической разведке, включая сейсмическую разведку морского дна и сейсмическую разведку промежуточной зоны. Способ можно осуществлять, используя записанные данные или первичные сейсмические данные по мере их сбора. Первичные сейсмические данные могут быть подвергнуты фильтрации в соответствии со способом на месте сбора данных. Это гарантирует, что с места сбора данных можно получить очищенный сигнал и его можно в этом виде переслать с места сбора. Это уменьшает количество данных,передаваемых для анализа за пределы места сбора, и снижает расходы, а также упрощает задачи запоминания, связанные с накоплением достаточного количества шумовых данных для анализа за пределами места сбора. С достижением выгоды способ можно применить к записям одного датчика, т.е. к записям до формирования какой-либо группы, в которой объединяются сигналы двух и более сейсмических датчиков. Хотя описание настоящего изобретения основано на обработке сейсмических сигналов, 002508 10 его можно использовать для звуковых сигналов,например, для геофизических исследований в скважинах. Конкретные применения для сейсмической разведки охватывают ослабление шума от зыби или шума сейсмоприемной косы,включая ослабление шума сейсмоприемной косы при сборе данных в поперечном потоке, ослабление поверхностной волны или волны от илистого слоя, или иного когерентного шума из данных морской, наземной сейсмической разведки или разведки в промежуточной зоне, компенсацию интерференции сейсмических волн,т.е. фильтрацию шума с использованием всей апертуры антенной решетки с большим количеством сейсмоприемных кос, либо буксируемых в воде, либо погружаемых на морское дно, или удаление донных отражений на основании сигнатурной оценки воображаемого источника; такой способ описан, например, в заявке на Европейский патент ЕР-А-066423. Другие случаи применения включают в себя подавление шума для различных способов сейсмической разведки месторождения с помощью буровых скважин. Известные способы сейсмической разведки с помощью буровых скважин включают в себя бурение с сейсмической разведкой (БСР) и вертикальное сейсмическое профилирование (ВСП) при бурении с просмотром вперед и ориентированием. Эти и другие особенности изобретения,предпочтительные варианты осуществления и их видоизменения, возможные применения и преимущества станут для специалистов в данной области техники более очевидными и понятными из нижеследующего подробного описания и чертежей, на которых фиг. 1 - изображение общих элементов наземной сейсмической системы сбора данных; фиг. 2 - общая структурная схема адаптивного формирователя диаграммы направленности в соответствии с примером настоящего изобретения; фиг. 3 - пример области, сохраняемой адаптивным формирователем диаграммы направленности в соответствии с примером настоящего изобретения; фиг. 4 - стадии задания матрицы ограничений в соответствии с примером настоящего изобретения; фиг. 5 - стадии использования матрицы ограничений в процессе фильтрации сейсмических записей в соответствии с настоящим изобретением; фиг. 6 - пример защищенной области,включающей в себя шумовую область, подавленную с помощью процесса адаптивного формирования диаграммы направленности в соответствии с примером настоящего изобретения; и фиг. 7 А-С - примеры задания защищенной области или областей в соответствии с настоящим изобретением. 11 Примеры осуществления изобретения Ниже подробно раскрыты основные концепции, лежащие в основе изобретения. Типичная наземная система сбора сейсмических данных показана на фиг. 1. Источник 10 возбуждается, следовательно,генерирует сейсмические волны 11, т.е. акустические волны с частотами ниже 500 Гц. Волны распространяются через внутреннюю область Земли 12 грунта и отражаются от различных мест. Но, хотя показана только одна отражающая поверхность 13, обычно существует большое количество отражающих поверхностей, при этом каждая отражает часть сейсмической волны обратно к поверхности. На поверхности сейсмические волны регистрируются сейсмическими датчиками 14 (геофонами). Эти датчики распределены вдоль линии или размещены в виде двумерной сети. В качестве примера основного источника шума показан путь 15 прохождения так называемой поверхностной волны. Поверхностная волна представляет собой энергию прямой волны, которая распространяется внутри слоев,близких к поверхности. Одна отличительная особенность поверхностной волны заключается в том, что она имеет иные характеристики распространения, чем сигналы, отраженные от более глубоких отражающих слоев: в показанной линии датчиков поверхностная волна достигает датчиков последовательно друг за другом. В противоположность этому сейсмические сигналы 16, отраженные от отражающей поверхности, находящейся на большой глубине, достигают всех датчиков 14 почти одновременно. Поэтому после переноса в пространство частотволновых чисел,известное какf-kпространство, полезный сейсмический сигнал обычно находится внутри узкого конуса вокруг оси f (что эквивалентно небольшим значениямk), тогда как для поверхностной волны характерны большие значения k. Теперь обратимся к фиг. 2, где показана общая структурная схема адаптивного формирователя диаграммы направленности в соответствии с настоящим изобретением. Предполагается наличие К датчиков, расположенных на местах rk, при этом k = 1, , К. Каждый датчик k регистрирует сигнал gk(n), при этом n = 1, , N. Буква "n" использована в качестве номера при выборках в дискретные моменты времени. Интервал выборок составляет t. Сигналы gk(n) обрабатывают, используя задержки k для формирования диаграммы направленности в главном сигнальном направлении. Оно является наиболее вероятным направлением, с которого ожидается приход сейсмических сигналов. В каналах хk(n) для управления диаграммой направленности обработку осуществляют с помощью локальных многоканальных адаптивных 12 фильтров для того, чтобы получить выходной сигнал: где Wikv(t) представляют собой регулируемые коэффициенты адаптивных фильтров, hi(n) являются окнами, наложенными на выходном конце, М представляет собой число локальных многоканальных адаптивных фильтров (или число выходных окон), a L = L1+L2+1 является числом коэффициентов на канал. Здесь и ниже черта под буквой обозначает вектор (в случае строчной буквы) или матрицу (в случае прописной буквы). Уравнение [1] можно переписать как (усеченную посредством окна) сумму по скалярному произведению, используя входной вектор х(n) ответвления в момент времени t, определенный как При использовании математических определений [2] и [3] уравнение [1] становится Теперь уравнения [1] и [4] описывают, каким образом находится выходной сигнал формирователя диаграммы направленности или блока фильтров после того, как заданы М весовых векторов wi. Эти векторы вычисляют как решение задачи оптимизации, которая описана ниже. Задача оптимизации определяется как с наложением ограничений где i = 1, 2, , М, аKL представляет собой суммарное число коэффициентов фильтров, аозначает норму L2. Этот функционал стоимости является линейной комбинацией мощности выходного сигнала формирователя диаграммы направленности (первый член в уравнении [5]) и так называемого коэффициента передачи белого шума формирователя диаграммы направленности,взвешенного мощностью входного сигнала(второй член в уравнении [5]). Относительный вес двух членов регулируется членом 2. Вклю 13 чение коэффициента передачи белого шума формирователя диаграммы направленности в функционал стоимости подразумевает повышение устойчивости формирователя диаграммы направленности при наличии неопределенностей моделирования сигналов (иногда называемых возмущениями) и численной корреляции между сигналом и шумом. Уравнение [6] описывает Q линейных ограничений, накладываемых на возможные решения задачи оптимизации. Здесь KLxQматрица С представляет собой матрицу ограничений, а Q-вектор f является вектором отклика. Реальный расчет линейных ограничений рассмотрен ниже. Возможное решение задачи оптимизации зависит от наложения следующих двух ограничений на вырезающие функции hi (n) для n = 1, 2, , N и для ji-1, i, i+1. Первое ограничение гарантирует, что блок фильтров эквивалентен случаю одного фильтра, если все локальные фильтры(wi) являются идентичными. Второе ограничение гарантирует, что окна имеют компактный носитель. Задача оптимизации может быть разделена со значительной детализацией при использовании второго условия (уравнение [10]) и приближения Приближение из уравнения [11] требует,чтобы соседние фильтры давали аналогичные результаты при приложении одних и тех же входных данных во временных областях, в которых перекрываются соседние окна, вместо требования, чтобы соседние фильтры были аналогичными на поточечном базисе. Поэтому приближение аналогично требованию, чтобы интеграл двух функций был замкнутым, а не сами функции. С учетом этого приближения первый член функционала стоимости J1 становится при этом Второй член в функционале стоимости можно переписать как 14 Комбинируя уравнения [5], [12] и [14] и перегруппировывая члены, всюду определенный функционал стоимости можно записать как где I обозначает единичную KLxKL-матрицу. Разделенную задачу оптимизации можно решить для каждого из М временных окон, допуская ограничения [6]. При использовании метода множителей Лагранжа оптимальный вес ответвления в каждом окне задается формулой при этом Второй член модифицированной локаль ной корреляционной матрицы Ф i может рассматриваться как член регуляризации с 2 в качестве параметра регуляризации. В литературе по обработке сигналов антенных решеток регуляризация корреляционных матриц при добавлении масштабированной единичной матрицы предлагается для повышения устойчивости при наличии возмущений в случае формирования диаграммы направленности в узкой полосе. Здесь функционал [5] стоимости включает в себя член регуляризации от начального ведущего члена до члена обобщения для адаптивного формирования диаграммы направленности в широкой полосе. Следовательно, характеристика фильтра изменяется в зависимости от частоты сигнала. Когда входные данные для формирователя диаграммы направленности характеризуются некоррелированным по пространству и во времени шумом (или белым шумом), то как корреляционная матрица i, так и модифицированная корреляционная матрица Ф i становятся пропорциональными единичной матрице. В этом случае оптимальный весовой вектор становится Оптимальный весовой вектор wq называется невозмущенным решением задачи оптимального формирования диаграммы направленности,а соответствующий отклик известен как невозмущенный отклик. Заметим, что невозмущенное решение полностью зависит от матрицы С ограничений и вектора f отклика. Оптимальный весовой вектор wi приближается к невозмущенному весовому вектору wq по мере роста параметра 2 регуляризации даже для общих шумовых полей. В этом случае мо дифицированная корреляционная матрица Ф i приближается к единичной матрице (сравните с[17]). Поэтому параметр 2 регуляризации задает вес оптимальному решению между решением, которое полностью зависит от принятых данных, и решением, которое не зависит от данных. В случае 2 = 1 оба решения одинаково 15 взвешены в том смысле, что их соответствующие корреляционные матрицы имеют одинаковое значение следа. В ситуациях, когда возмущения являются более значительными, т.е. в предположении, что геометрия системы сбора сейсмических данных точно не выдерживается,нахождение характеристики формирователя диаграммы направленности с более высоким уровнем регуляризации может дать более устойчивые к возмущениям результаты. Другой аспект изобретения относится к расчету линейных ограничений (уравнение [6]),налагаемых на формирователь диаграммы направленности. Линейные ограничения одного вида, которые могут быть наложены на формирователь диаграммы направленности, рассчитаны на сохранение сейсмических сигналов, приходящих с направления цели, при подавлении помех, приходящих с других направлений. Регулируемые задержки k, показанные на фиг. 2, задают единственное направление просмотра. Сигналы,приходящие с этого направления, находятся в фазе, и для этих сигналов система может считаться одним фильтром с конечной импульсной характеристикой. Значения коэффициентов для этого эквивалентного процессора равны суммам соответствующих коэффициентов в адаптивном процессоре. Каждый локальный формировательwi диаграммы направленности состоит из адаптивных фильтров wi1, wi2, , wik обработки данных из каждого канала и суммирующего устройства. Сумма индивидуальных фильтров wi1,wi2, , wik ограничена так, что она составляет величину weq, которая представляет собой требуемый отклик для сигналов, приходящих с направления просмотра, например, для единичного импульса с направления просмотра. В таком случае невозмущенный отклик соответствует формирователю диаграммы направленности с фиксированными весами, имеющему единые равные веса для всех элементов. В пространстве частот-волновых чисел это соответствует функции вида sin х/х, которая является постоянной в направлении f. Следовательно, вследствие увеличения значений параметра 2 регуляризации формирователь диаграммы направленности сохраняет сигналы, приходящие не только с направления просмотра, но также и с соседних направлений. Как рассмотрено в последней части, используя ограничения и регуляризацию единственного направления просмотра, можно сохранить сигналы, приходящие с направлений вблизи направления просмотра. Хотя этот подход является полезным и достаточным для многих случаев применения, желательно получить более общие линейные ограничения, которые будут более точно удовлетворять требованиям в любой ситуации при сборе сейсмических данных. 16 Для случая формирования диаграммы направленности в узкой полосе известны различные способы получения обобщенных ограничений. Ограничения производных используют для воздействия на отклик в пределах области пространства откликов путем задания равенства нулю производных отклика формирователя диаграммы направленности в определенных точках пространства откликов. Ограничения собственных векторов основаны на, по меньшей мере,квадратичном приближении к желаемому отклику, и их используют для управления откликом формирователя диаграммы направленности в пределах областей пространства откликов. Доказано, что, хотя обобщение этих методов на задачи формирования диаграммы направленности в широкой полосе частот обеспечивает удовлетворительный отклик в отдельных областях пространства откликов, оно может привести к неприемлемо высокому уровню боковых лепестков в других областях. Для настоящего изобретения условия обобщенного ограничения использованы для наложения на произвольный невозмущенный отклик в формирователе диаграммы направленности и для достижения уверенности в том, что определенные участки в пространстве частотволновых чисел полностью управляются с помощью невозмущенного отклика. Эти условия установлены с учетом следующих функциональных задач:- согласование произвольного диапазона кажущихся скоростей сигналов;- возможность использования более крупных антенных решеток;- возможность работы адаптивного формирователя диаграммы направленности при более низком уровне (2) регуляризации и, следовательно, достижение более высокого ослабления шумов; и- достижение более высокого ослабления шумов при заданном уровне регуляризации путем соответствующего выбора невозмущенного отклика. Чтобы придать формирователю диаграммы направленности произвольный невозмущенный отклик, можно воспользоваться тем фактом, что линейные ограничения [6] определяют Qмерную гиперплоскость в KL-мерном пространстве. Из уравнения [18] видно, что невозмущенный весовой вектор wq является нижним нормированным решением для уравнения [б], т.е. самым коротким вектором от начала до гиперплоскости. Кроме того, из уравнения [18] видно, чтоwq является элементом подпространства, порожденного столбцами матрицы С ограничений. Столбцы матрицы С в общем случае являются независимыми (в противном случае некоторые ограничения должны быть излишними), поэто 17 му без потери общности их можно выбрать ортогональными. После задания требуемого невозмущенного весового вектора wqd получаются следующие выражения для матрицы С ограничений и вектора f отклика 18 служивает внимание то, что в противоположность описанному выше примеру в контур сигнала не вводятся временные задержкидля управления откликом фильтра. Управляющий вектор антенной решетки можно записать в виде произведения Кронекера совместно с условием где D представляет собой KLx(Q-1)-матрицу,столбцы которой ортогональны к wqd. Точная форма матрицы D описана ниже. В случае С и f,выбранных в соответствии с [19] и [20] соответственно, можно видеть, что требуемый весовой вектор равен вектору wq невозмущенного отклика (уравнение [18]). После определения первого столбца матрицы С ограничений и вектора f отклика для задания невозмущенного весового вектора в следующих частях выводится определение матрицы D, которая является частью матрицы С. При сборе сейсмических данных отраженные сигналы, которые необходимо сохранить,можно рассматривать как линейную комбинацию плоских волн со связанными значениями частот и волновых чисел из известной области пространства частот-волновых чисел. Эта область, которая обозначена как А на фиг. 3, зависит от конкретной геометрии системы сбора, но обычно представляет собой конус вокруг оси частот. На фиг. 3 показан один возможный пример области сохранения в пространстве частотволновых чисел, где А выбрана так, чтобы сохранить все сигналы с кажущейся скоростью+/-1500 м/с или с большей. В настоящем примере отклик формирователя диаграммы направленности в области А должен полностью управляться с помощью невозмущенного отклика,который сохраняет сигнал. Ряд SA сейсмических сигналов, подлежащих сохранению с помощью процесса фильтрации, определяется выражением в виде составных частей плоских волн со связанными значениями частот и волновых чисел из области А, где S(f, k) является комплексной амплитудой Фурье, соответствующей составляющей плоской волны сигнала с частотой f и волновым числом k. Используя [22], входной вектор [2] ответвления можно перезаписать в виде при этом d(f, k) определен как управляющий вектор антенной решетки, соответствующий составляющей плоской волны, заданной конкретной частотой f и волновым числом k. За При использовании [4] отклик формирователя диаграммы направленности на сигнальный входной вектор s(n) ответвления представляет собой Отклик формирователя диаграммы направленности должен быть одним и тем же как для оптимального весового вектора wi, так и для невозмущенного весового вектора wq, и, кроме того, это равенство должно сохраняться для всех сигналов s(t; r) области сохранения, т.е. сигналов с произвольно связанными коэффициентами S(f, k) Фурье, так что (f, k) находится в области А. Для этого требуется, чтобы Путем разложения оптимального весового вектора на фиксированную весовую часть, равную невозмущенному весовому вектору, и адаптивную весовую часть в соответствии с решением, известным как обобщенное подавление боковых лепестков (ОПБЛ), можно показать,что последнее уравнение эквивалентно требованию, чтобы вектор d(f, k) находился в пространстве столбцов матрицы С ограничений. Поэтому дополнительная задача настоящего изобретения заключается в нахождении эффективного, т.е. предпочтительно низкого ранга, базиса для пространства управляющих векторов d(f, k). Однако имея скалярное кратное вектора wqd, уже расположенное в первом столбце матрицы С, на самом деле необходимо найти базис низкого ранга для части этого пространства, которая лежит в ортогональном дополнительном подпространстве вектора wqd. Проекция d(f, k) на ортогональный дополнительный элемент вектора wqd представляет собой спроектированный вектор управления где выражение, стоящее в круглых скобках,представляет собой ортогональный дополнительный оператор проектирования по отношению к wqd, при этом Используя тот факт, что любой KL-мерныйd (f, k) можно записать как линейную комбинацию ортогональных векторов v1, , vKL, 19 ранг Р (РKL) приближения спроектированных векторов управления получается с помощью где Чтобы получить представление вектораk) в области А, зададим функционал ошибки по отношению к норме L2 в виде Используя корреляцию всех спроектированных управляющих векторов в области А пространства частот-волновых чисел, заданную выражением функционал ошибки можно выразить в виде Верхний индекс "Н" означает сопряженную транспозицию вектора или матрицы. Оптимальный ряд упорядоченных базисных векторов v можно найти путем минимизации функционала р стоимости при наложении ограничения в виде vpH vp = 1, при этом 1 рKL. При использовании множителей Лагранжа задача минимизируется Взяв градиент по отношению к vp и придав ему нулевое значение, можно найти оптимальные базисные векторы v1, , vKL как собствен ные векторы матрицы R A (по отношению к собственным значениям р). Теперь недостающую часть D матрицы С ограничений (сравните с [19]) можно определить в виде главных собст венных векторов матрицы R A: Заметим, что управляющие векторы d(f, k) являются, в основном, комплекснозначными. Поэтому их корреляционная матрица R A на протяжении всей области А в пространстве частот-волновых чисел является комплекснозначной, что делает собственные векторы матрицыR A и, следовательно, столбцов С также комплекснозначными. Однако при сейсмической разведке сигналы являются реальнозначными сигналами, которые имеют комплексные сопряженные коэффициенты Фурье. Поэтому виды областей А, представляющие интерес, уже симметричны в пространстве частот-волновых чисел по отношению к началу. В таком случае все результирующие матрицы (A, С) являются реальнозначными. 20 Описанное выше разложение спроектиро ванных управляющих векторов d (f, k) является аналогом разложения Кархунена-Леве. Хотя исходное разложение Кархунена-Леве предназначено для случайного вектора, представленное здесь разложение предназначено для детерминированного ряда векторов. Это находит отражение в способе приближенного представления функционала р ошибки, сравните с [32]. Ковариационная матрица управляющих векторов, подобная корреляционным матрицам,определенным в [33], была впервые введена Бакклеем (Buckley К.М., IEEE Trans. Acoust.Speech Signal Processing, vol. ASSP-35, 249-266,March 1987), но после этого была эвристически определена в рамках стохастической структуры в предположении нулевого среднего значения сигналов и при использовании узкополосного представления широкополосных сигналов. В описании настоящего изобретения корреляционная матрица получена из первых принципов в рамках детерминированной структуры. Основные стадии способа определения обобщенного ограничения показаны на рабочей диаграмме, приведенной на фиг. 4. Они включают в себя- задание требуемого невозмущенного весового вектора, wqd, который определяет первый столбец матрицы ограничений;- расчет R A, корреляционной матрицы всех спроектированных управляющих векторов в области А; и- определение главных собственных векто ров (v1, , vKL) матрицы R A в качестве остальных столбцов матрицы ограничений. При наличии указанных расчетов матрица ограничений задается в виде а вектор отклика в виде при обычном выбореив уравнении [21]. Задание требуемого невозмущенного весового вектора для образования необходимого невозмущенного отклика является существенным для задачи расчета неадаптивного многомерного фильтра, и для этого существуют многочисленные способы. Например, можно сделать ссылки на книги, такие как Chen W. (ed.),"The circuit and filters handbook", IEEE and CRCPrentice Hall (1990). После того, как матрица ограничений определена, можно осуществить фильтрацию 21 оцифрованных записей отдельных сейсмических датчиков, чтобы получить запись одного датчика со сниженным уровнем шума. После этого очищенную запись можно использовать на дальнейших стадиях обработки, таких как формирование группы, накопление, анализ скорости, коррекция разности времени прихода отраженной волны и т.д., известных в данной области техники, для получения, в конце концов, представления относительно подземных формаций. Эти стадии показаны на рабочей диаграмме, представленной на фиг. 5. Однако поскольку эти стадии (за исключением стадии фильтрации) не являются особенно касающимися настоящего изобретения, их детальное описание здесь опущено. В следующих частях описания представлены альтернативные способы эффективного определения области А (см. фиг. 3), защищенной с помощью невозмущенного вектора. Для сейсмических применений невозмущенный весовой вектор может быть задан так,что на протяжении всей области А в пространстве частот-волновых чисел отклик почти равен единице, и поэтому обеспечивает сохранение сейсмических сигналов в этой области. В областях пространства частот-волновых чисел, в которых ожидается наличие шума, невозмущенный отклик должен иметь низкие значения с тем, чтобы даже при использовании регуляризации, получалась хорошая характеристика. Как описано в следующей части, процесс определения ограничения, может быть обобщен. Ограничение, установленное выше, получено в базисе низкого ранга спроектированных управляющих векторов в области А. При этом задача заключалась в сохранении всех сигналов в защищенной области А без какого-либо обращения к их относительной интенсивности. Это отражено в выборе функционала p ошибки,определенного в [32]. Во многих применениях этот выбор имеет смысл, когда желательно защитить составляющие сигнала, которые имеют намного меньшие амплитуды, чем составляющие другого сигнала. С другой стороны, в некоторых иных применениях может оказаться желательным минимизировать мощность искажений всех сигналов. Это обобщение описанного выше способа выражается обобщением определения p в соответствии с После этого корреляционная матрица первоначальных управляющих векторов в области А становится Корреляционную матрицу спроектированных управляющих векторов можно получить из[40], используя ортогональный дополнительный оператор проектирования (уравнения [27], [28]) В некоторых применениях может быть желательным исключение дополнительных областей в пространстве частот-волновых чисел, на протяжении которых отклик формирователя диаграммы направленности будет полностью управляться невозмущенным откликом. На фиг. 6 показан пример области А в пространстве частот-волновых чисел, которая представляет собой область А 1 защиты сигналов и шумовую область А 2. Если известно, что при определенном условии почти всегда существует составляющая когерентного шума, занимающая область А 2, то может быть выгодно задать невозмущенный весовой вектор wqd, который будет вводить глубокие нули в этой области, т.е. те,которые подавляют любой сигнал с направления(f, k), где (f, k) является элементом области А 2. В таком случае адаптивные веса будут направлены на ослабление шума в остальных областях пространства частот-волновых чисел. Используя методику определения обобщенного ограничения, можно точно задать невозмущенный отклик формирователя диаграммы направленности, и при этом отклик формирователя диаграммы направленности на всем протяжении заранее заданной области А в f-kпространстве может быть ограничен для приближения невозмущенного отклика к произвольному пределу. Точность этого приближения контролируется параметром Р пользователя,который представляет собой число главных со ставляющих матрицы R A. По мере возрастания Р все больше и больше степеней свободы становятся фиксированными, а адаптивные степени свободы сокращаются. По мере приближения Р к KL-1 отклик формирователя диаграммы приближается к невозмущенному отклику не только в области А, а на протяжении всего f-kпространства, независимо от характеристик шумового поля и используемого параметра регуляризации. Когда область А является относительно большой, распределение собственных значений матрицы R A может быть только слегка убывающим, так что число главных составляющих,необходимых для адекватного представления пространства управляющих векторов в области А, может быть большим. Если для того чтобы сохранить больше степеней свободы адаптивными, используется небольшое количество главных составляющих, отклик формирователя диаграммы направленности может существенно отклониться от невозмущенного отклика в А. Это может происходить даже в пределах первоначального направления просмотра, заданного числом k = 0. Это находится в резком различии с первоначальными ограничениями для единственного направления просмотра, описанными выше, в случае которых гарантируется, что от 23 клик на всем протяжении линии k = 0 является равным единице для всех частот. Для того чтобы гарантировать, что отклик формирователя диаграммы направленности является точно таким, как невозмущенный отклик на протяжении k = 0 в случае выбранных ограничений для направления просмотра, наряду с произвольным строгим ограничением отклика в остальной части области А, предпочтительно область А разделяют и в каждой части обработку осуществляют отдельно. Способы осуществления этого принципа показаны на фиг. 7 А-С, где А является областью, показанной на фиг. 3. В нижеследующих примерах, как показано на фиг. 7 А и 7 В, эта область А разделена на части А 1 и А 2. Можно видеть, что, если А 1 является линией k = 0 в f-k-пространстве, то пространство спроектированных управляющих векторов на протяжении А 1 может быть перекрыто собст венными векторами матрицы R A1 в количествеL-1 (см. уравнение [42] ниже), поскольку не возмущенный отклик wq соответствует единичному отклику на протяжении А 1, как в обычном случае. То есть матрица теля диаграммы направленности в зависимости от волнового числа является ограниченной, и более строгое ограничение отклика в нескольких точках может быть более эффективным, чем ограничение во всех точках широкой области. Если число элементов решетки большое или область А является широкой по оси волновых чисел, то задание А 2, как на фиг. 7 А, будет предпочтительным. Конечно, как показано на фиг. 7 С, с целью обобщения можно даже сочетать дополнительные ограничения двух типов,что приведет к появлению трех частей области А, обозначенных как A1, A2 и A3. Когда защитная область А разделена путем использования любого из приведенных выше принципов, ограничения можно вычислить, задавая вектор отклика, как в уравнении [38], где 0 имеет соответствующую длину, а матрица С ограничений задается как имеет ранг L-1. Это представляет собой интересный результат, поскольку очевидным образом связывает выбранные ограничения для направления просмотра и обобщенные ограничения. Если в качестве области А защиты сигнала выбирается А 1, то невозмущенный отклик wq выбирается как при использовании проекционной матрицы относительно wqd, заданной в уравнениях [27],[28]. DA2 представляет собой матрицу, столбцы которой являются главными собственными век торами матрицы R A2 Здесь D A1 представляет собой матрицу,столбцы которой являются собственными век торами в количестве L-1 матрицы R A1 (сравните с уравнением [42]) и столбцы матрицы D в матрице С ограничений выбираются как собственные векторы в количе стве L-1 матрицы R A1, соответствующие ненулевым собственным значениям; следовательно,с помощью двух способов ряд линейных ограничений становится одинаковым. При наличии определенной выше области А 1 по оси k, существуют разнообразные возможности для задания А 2. Одна из возможностей заключается в задании А 2 в качестве остальной части области А, как на фиг. 7 А. Другой путь задания области А 2 показан на фиг. 7 В. В этом случае А 2 находится, по существу, на границе первоначальной области А. В общем случае, если число элементов К антенной решетки небольшое, а первоначальная область А имеет относительно малую протяженность по оси волновых чисел, будет предпочтительным задание дополнительных ограничений, как на фиг. 7 В. Когда число датчиков небольшое, изменчивость отклика формирова Из уравнения [46] видны два альтернатив ных пути расчета R А 2. Эти уравнения записаны для случая разделения А на две подобласти, но могут быть обобщены для большего количества подобластей. При разделении первоначальной области А защиты сигнала, как это описано, выборе А 1 по линии k = 0, задании невозмущенного откликаD в матрице С ограничений, выбранными в виде собственных векторов в количестве L-1 матрицыA1, соответствующих ненулевым собственным значениям, любые дополнительные подобласти А 2, A3 и т.д. будут обеспечивать дополнительное управление с помощью отклика фор 25 мирователя диаграммы направленности с учетом ограничений направления просмотра. Для некоторых применений может быть полезным уменьшение степеней свободы, используемых в адаптивном формирователе диаграммы направленности. В так называемом частично адаптивном формирователе диаграммы направленности только часть степеней свободы используется адаптивно. Основное преимущество уменьшения числа адаптивных степеней свободы заключается в снижении затрат на вычисления и в повышении скорости адаптивной сходимости. Основной недостаток частично адаптивного формирования диаграммы направленности заключается в ухудшении способности формирователя диаграммы к подавлению стационарных помех. Поэтому задача разработки частично адаптивного формирователя диаграммы направленности заключается в уменьшении числа адаптивных весов без существенного ухудшения характеристики адаптивной антенной решетки. Предшествующие частично адаптивные способы включают в себя численные способы для приближенной минимизации усредненной мощности выходного сигнала обобщенного устройства подавления боковых лепестков для требуемого числа адаптивных весов, где усреднение осуществляют по диапазону параметров помех. В настоящем изобретении использован способ, который основан на способе расчета,описанном в статье Yang Н., Ingram М.А., IEEETrans. on Antennas and Propagation, vol. 45, 843850, May 1997. В нем также сделана попытка минимизировать среднюю мощность выходного сигнала обобщенного устройства подавления боковых лепестков, но при соблюдении ограничения, заключающегося в том, что решения с приведенной размерностью для всех сценарных проб находятся в том же самом подпространстве. Это ограничение дает возможность использовать разложение на сингулярные значения,чтобы получить уменьшающее ранг преобразование, посредством чего упрощается задача оптимизации. Решение для обобщенного устройства подавления боковых лепестков может быть записано в виде (сравните с [18]) где В представляет собой KLx(KL-Q)-матрицу полного ранга, столбцы которой порождают ортогональное подпространство матрицы С ограничений, и известна как блочная матрица. Вектор wai представляет собой KLxQ-мерную адаптивную часть оптимального весового вектора и задается соотношением Частично адаптивное обобщенное подавление боковых лепестков достигается при меньшем числе W адаптивных весов путем использования линейного преобразования (KL 002508Q)x W, т.е. Т, после В до адаптивного взвешивания. Частично адаптивный оптимальный весовой вектор может быть выражен как где W-мерная адаптивная часть оптимального веса представляет собой Теперь задача заключается в выборе матрицы Т, которая минимизирует мощность помех и шумов на выходе в ряде вероятных шумовых ситуаций. Эти ситуации могут характеризоваться различными параметрами, подобными числу источников помех, направлениям помех, спектральным плотностям помех источника, уровням белого шума и т.д. Используемый способ можно кратко изложить следующим образом:- для каждого случайного результата j из распределения параметров ситуации рассчитывают оптимальный адаптивный весовой векторwa1 полного ранга, а преобразованный весовой векторзадают соотношением где представляет собой собственную композицию- векторы wa1(j) и (j) помещают в матрицы W и А соответственно, вычисляют единственное значение разбиения А, чтобы получитьWAUA, где верхний индекс, обозначает псевдоинверсию. В большинстве случаев сейсмической разведки шум, такой как поверхностная волна или шум морской зыби, занимает только часть имеющегося временного диапазона. Например,при наземной сейсмической разведке частота Найквиста составляет 250 Гц, тогда как большая часть энергии поверхностной волны находится ниже 30 Гц. Для снижения затрат на расчеты желательно осуществлять локальную фильтрацию в частотном диапазоне, в котором находится шум. Один способ достижения этой цели включает в себя добавление блоков квадратурных зеркальных фильтров без потерь, осуществляющих восстановление, которое описали, например, Vaidyanathan P.P в "Multirate systems(1986) для системы подавления сейсмического шума и помех с использованием блока многоканальных фильтров, описанных выше. В этой системе использованы два блока фильтров. Блок квадратурных зеркальных фильтров использу 27 ется для разделения трасс по частотным диапазонам и прореживания до адаптивной фильтрации, а затем используется для восстановления исходного сигнала. Блок многоканальных адаптивных фильтров является центральным узлом системы, выполняющей фильтрацию для подавления шума. Использование блоков восстанавливающих фильтров без потерь для прореживания позволяет уменьшить число точек, которые необходимо обрабатывать, а также позволяет уменьшить число коэффициентов в адаптивных фильтрах, что приводит к существенному сокращению машинного времени и к снижению требований к объему памяти. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ для фильтрации шума из дискретных сейсмических сигналов с шумами, содержащий стадии, при осуществлении которых принимают сигналы, представляющие сейсмическую энергию, отраженную и/или преломленную от земной структуры, используя множество сейсмических приемников, и фильтруют принятые сигналы, используя, по меньшей мере частично, адаптивный фильтр, который ослабляет сигналы, в котором отсутствуют заранее заданные характеристики распространения; указанная стадия фильтрации содержит этапы, при осуществлении которых задают, по меньшей мере, две системы условий, при этом первая система определяет требуемый отклик, а вторая система определяет характеристики распространения сигналов, подлежащих сохранению,при этом отсутствует влияние первой системы на вторую систему, и адаптируют коэффициенты указанного фильтра при соблюдении указанных, по меньшей мере, двух независимых систем условий с тем, чтобы оптимизировать выходные данные фильтра для сигналов, в которых отсутствуют характеристики распространения сигналов, подлежащих сохранению. 2. Способ по п.1, в котором на стадии адаптации оптимизируют функцию стоимости,представляющую мощность выходного сигнала фильтра и коэффициент передачи белого шума фильтром. 3. Способ по п.2, в котором в качестве функции стоимости используют взвешенную сумму мощности выходного сигнала фильтра и коэффициента передачи белого шума фильтром. 4. Способ по п.3, в котором предусматривают возможность регулирования в функции стоимости относительного веса мощности выходного сигнала и коэффициента передачи шума. 5. Способ по п.1, в котором характеристики распространения сигнала определяют с помощью его временного и пространственного спектрального содержания. 28 6. Способ по п.1, в котором характеристики распространения сигнала определяют с помощью его волнового числа и частоты. 7. Способ по п.1, в котором характеристики распространения сигнала задают в виде области или в виде областей в пространстве частот-волновых чисел. 8. Способ по п.1, в котором характеристики распространения сигналов включают в себя некоторое количество направлений в пространстве частот-волновых чисел. 9. Способ по п.1, в котором условия определяют матрицу ограничений, содержащую, по меньшей мере, два взаимно ортогональных подпространства, при этом первое подпространство определяет требуемый отклик фильтра, а второе подпространство определяет характеристики распространения сигналов, подлежащих сохранению, указанную матрицу используют в течение процесса адаптации коэффициентов фильтра. 10. Способ по п.1, в котором условия определяют матрицу ограничений при использовании вектора невозмущенного отклика и главных собственных векторов корреляционной матрицы, выполненной из управляющих векторов, задающих, по меньшей мере, одну область пространства частот-волновых чисел, в которой сохраняют сигналы. 11. Способ по п.1, в котором условия задают так, что сигналы с заранее заданными характеристиками распространения подавляются фильтром. 12. Способ по п.1, в котором на указанной стадии фильтрации дополнительно задают дополнительные системы условий, при этом одна система условий сдвигает требуемый отклик фильтра до нуля, а другая система условий задает характеристики распространения сигналов,подлежащих подавлению фильтром. 13. Способ по п.1, в котором используют фильтр, содержащий М локальных во времени фильтров, при этом из указанных фильтров образуют блок фильтров, где М является целым числом, равным или больше двух. 14. Способ по п.13, включающий в себя стадию, при осуществлении которой умножают М отфильтрованных оценок на временные вырезающие функции. 15. Способ по п.14, в котором используют временные вырезающие функции, отвечающие условию, что только соседние окна перекрываются. 16. Способ по п.14, в котором функцию стоимости минимизируют, используя приближение, заключающееся в том, что сумма, взвешенная вырезающими функциями, выходных сигналов соседних фильтров из М фильтров является одинаковой при приложении одного и того же сигнала во временных областях, где перекрываются указанные вырезающие функции. 29 17. Способ по п.1, содержащий дополнительную стадию, при осуществлении которой разделяют коэффициенты фильтра на фиксированную часть и адаптивную часть. 18. Способ по п.1, содержащий дополнительную стадию, при осуществлении которой разделяют сигналы, по меньшей мере, на два частотных диапазона, фильтруют, по меньшей мере, один из указанных, по меньшей мере, в двух частотных диапазонах и до дополнительной обработки рекомбинируют указанные частотные диапазоны, чтобы восстановить ослабленные шумом сейсмические сигналы. 19. Способ по п.1, в котором дискретные сигналы с шумами, используемые как входные,записывают от отдельных сейсмических датчиков до любых способов группирования. 30 20. Способ по п.1, содержащий дополнительные стадии, при осуществлении которых располагают, по меньшей мере, один сейсмический источник и некоторое количество сейсмических приемников в соответствующих местах на земле, в море или в окружающих условиях промежуточной зоны; возбуждают указанный,по меньшей мере, один источник для распространения энергии через подземные формации и используют указанные приемники для измерения энергии в виде записей отдельных датчиков,преобразуют указанные записи отдельных датчиков в дискретные сейсмические сигналы; и передают указанные сигналы в качестве входных к фильтру.
МПК / Метки
МПК: G01V 1/36
Метки: способ, адаптивный, сейсмического, шума, помехи, ослабления
Код ссылки
<a href="https://eas.patents.su/17-2508-adaptivnyjj-sposob-oslableniya-sejjsmicheskogo-shuma-i-pomehi.html" rel="bookmark" title="База патентов Евразийского Союза">Адаптивный способ ослабления сейсмического шума и помехи</a>
Способ сейсмического мониторинга нефтегазовых месторождений с использованием разновременных съемок
Номер патента: 1212
Опубликовано: 25.12.2000
Авторы: Алтан Мехмет Суат, Росс Кристофер Филип
МПК: G01V 1/28
Метки: нефтегазовых, съемок, использованием, способ, месторождений, мониторинга, сейсмического, разновременных
Формула / Реферат:
1. Способ обнаружения физических изменений в резервуаре, включающий: подготовку данных, по меньшей мере, двух сейсмических съемок резервуара, первая из которых проведена в первый период времени, а вторая - во второй период времени; и осуществление процесса сравнения данных первой сейсмической съемки с данными второй сейсмической съемки, предусматривающий: выделение первой группы отраженных сигналов (например, волновых импульсов) в совокупности...
Состав и способ для снижения шума и/или загрязнения в системе жидкостного охлаждения двигателя
Номер патента: 2191
Опубликовано: 28.02.2002
Автор: Айшервуд Эдам
МПК: F01P 11/06, C09K 5/00
Метки: охлаждения, загрязнения, двигателя, жидкостного, состав, снижения, системе, способ, шума
Формула / Реферат:
1. Состав для снижения шума и/или загрязнения в жидкостной системе охлаждения двигателя, включающий органический полимерный микроволокнистый материал с аспектным соотношением 10-5000, нерастворимый в охлаждающей жидкости жидкостной системы охлаждения. 2. Состав по п.1, в котором аспектное соотношение микроволокон составляет 10-3000. 3. Состав по п.1 или 2, в котором упомянутый материал содержится в носителе. 4. Состав по п.3, в котором носителем...
Гидрофонный модуль для морского сейсмического кабеля
Номер патента: 1747
Опубликовано: 27.08.2001
Авторы: Нгуйен Хоан П., Чанг Вин Х., Льюс Ричард Х., Ламанс Дэвид С., Баджер Алджернон С., Нейборс Кристофер А.
МПК: H04R 23/00, G01V 1/38
Метки: сейсмического, кабеля, модуль, морского, гидрофонный
Формула / Реферат:
1. Гидрофонный модуль с профилем низкого аэродинамического сопротивления для морской сейсмической системы, содержащий провода передачи данных, причем гидрофонный модуль включает в себя корпус с внешней изогнутой поверхностью и полостью, в которой расположен гидрофонный узел с прикрепленными к нему выводными проводами, выходящими из полости, при этом полость заполнена звукопроводящим материалом, а корпус имеет углубление, расположенное вдоль его...
Электрохирургическая система для ослабления/удаления отложений струпьев на электрохирургических инструментах
Номер патента: 2484
Опубликовано: 27.06.2002
Авторы: Миллер Скотт Аллан III, Брасселл Джеймс Л., Хейм Уоррен Пол
МПК: A61B 18/12
Метки: струпьев, электрохирургических, отложений, электрохирургическая, система, инструментах
Формула / Реферат:
1. Способ электрохирургии, при котором обеспечивают электрически замкнутую цепь и подают электрохирургический сигнал на рабочую поверхность электрохирургического инструмента для передачи электрической энергии к участку тканей пациента от указанной рабочей поверхности, отличающийся тем, что используют электрохирургический сигнал, среднее смещение которого имеет отрицательную величину. 2. Способ электрохирургии по п.1, в котором указанная операция...
Предыдущий патент: Система сжигания топлива в псевдоожиженном слое с производством пара
Случайный патент: Способ получения халькогенонов