Контроль качества данных и определение углов пласта, осуществляемые в реальном времени по данным многокомпонентного индукционного каротажа с использованием нейронных сетей
Номер патента: 13708
Опубликовано: 30.06.2010
Авторы: Ю Лимин, Рабинович Майкл, Фан Шэн, Табаровский Леонтий
Формула / Реферат
1. Способ определения параметра пласта с использованием метода индукционного каротажа, при осуществлении которого
с помощью прибора собирают результаты многокомпонентных измерений пласта посредством индукционного каротажа,
проводят их обработку методом многочастного фокусирования, по меньшей мере, для ослабления и(или) исключения приствольных влияний и
оценивают параметр пласта, используя нейронную сеть.
2. Способ по п.1, в котором параметром пласта является по меньшей мере один из группы, включающей горизонтальное удельное сопротивление пласта, коэффициент анизотропии пласта, угол наклона пласта, угол поворота прибора и толщину пласта.
3. Способ по п.1, в котором при обработке методом многочастного фокусирования (MFF) используют следующее уравнение:
![]()
где K - постоянная, описывающая особенности прибора,
H - данные магнитного поля и
s - удельная проводимость.
4. Способ по п.3, при осуществлении которого поворачивают скорректированные составляющие в направлении, в котором величина одной из поперечных составляющих становится равной нулю.
5. Способ по п.4, в котором при повороте используют следующее уравнение:

где Hxy'' - нормированная и скорректированная поперечная составляющая Hxy,
Hxx - нормированная главная составляющая в направлении по оси X,
Hyy - нормированная главная составляющая в направлении по оси Y,
j - угол поворота,
Hxx' - повернутая составляющая Hxx и
Hyy' - повернутая составляющая Hyy.
6. Способ по п.4, в котором дополнительно обрабатывают повернутые составляющие для получения нормированных составляющих.
7. Способ по п.6, в котором дополнительно определяют качество оценки путем сравнения по меньшей мере одной из составляющих из группы, включающей скорректированные, повернутые и нормированные составляющие, с соответствующей измеренной составляющей и определения качества оценки по результатам сравнения.
8. Способ по п.1, в котором упомянутые измерения включают многочастотные измерения.
9. Способ по п.1, в котором угол (j) поворота прибора определяют, исходя из следующей зависимости:
![]()
в которой Hxy'' - нормированная и скорректированная поперечная составляющая Нху,
Hxx - нормированная главная составляющая в направлении по оси X и
Hyy - нормированная главная составляющая в направлении по оси Y.
10. Способ по п.1, в котором нормируют данные, вводимые в нейронную сеть, путем инвариантного суммирования поворотов с использованием следующей зависимости:
![]()
где Hxx'- повернутая составляющая Нхх,
Hyy' - повернутая составляющая Нуу и
Hzz - нормированная главная составляющая в направлении по оси Z.
11. Способ по п.1, в котором используют нейронную сеть в реальном времени.
12. Способ по п.1, в котором осуществляют оценку в процессе бурения ствола скважины.
13. Способ обучения нейронной сети, при осуществлении которого выбирают модель, отображающую пласт, вычисляют набор синтезированных данных для множества составляющих, спрогнозированных для использования каротажного прибора в пласте, соответствующем модели, при этом набор синтезированных данных формируют с использованием одномерного кода и загружают набор синтезированных данных и модель в нейронную сеть.
14. Способ по п.13, в котором модель содержит по меньшей мере один из параметров, включающих горизонтальное удельное сопротивление пласта, коэффициент анизотропии пласта, угол наклона пласта, угол поворота прибора и толщину пласта.
15. Способ по п.13, в котором формируют набор синтезированных данных по меньшей мере для одной особенности пласта, выбранной из группы, включающей множество величин горизонтального удельного сопротивления, множество коэффициентов анизотропии, множество величин толщины, множество углов наклона пласта и множество углов поворота прибора.
16. Способ по п.13, в котором набор синтезированных данных содержит по меньшей мере один из результатов измерений из группы, включающей скорректированные, повернутые и нормированные результаты измерений.
17. Машиночитаемый носитель с компьютерным программным продуктом, предназначенным для осуществления оценки параметра пласта и содержащим команды на:
использование прибора для регистрации данных многокомпонентных измерений пласта посредством индукционного каротажа,
обработку результатов измерений методом многочастного фокусирования по меньшей мере для ослабления и(или) исключения приствольных влияний и
использование нейронной сети для оценки параметра пласта.
18. Носитель по п.17, дополнительно содержащий команды по определению качества оценки путем сравнения по меньшей мере одной из составляющих из группы, включающей скорректированные, повернутые и нормированные составляющие, с соответствующей измеренной составляющей и определения качества оценки по результатам сравнения.
19. Носитель по п.17, дополнительно содержащий команды по выработке управляющих сигналов для регистрации данных.
20. Носитель по п.17, дополнительно содержащий команды для оценки параметра пласта в процессе бурения ствола скважины.
21. Прибор многокомпонентного индукционного скважинного каротажа, содержащий
множество генераторных катушек и множество приемных катушек для осуществления измерений удельного сопротивления, каждое из которых связано с электронным оборудованием, которое, в свою очередь, связано с процессором для приема результатов измерений главных составляющих и поперечных составляющих удельного сопротивления,
при этом процессор снабжен машиночитаемыми командами на осуществление
обработки результатов измерений методом многочастного фокусирования для удаления и(или) исключения, по меньшей мере, приствольных влияний и(или) влияний смещения и получения в результате скорректированных составляющих,
поворота каждой из скорректированных составляющих в направлении, в котором величина одной из поперечных составляющих становится равной нулю,
получения нормированных составляющих для главных и поперечных составляющих,
оценки параметра пласта с использованием нейронной сети,
определения качества оценки путем сравнения по меньшей мере одной из составляющих из группы, включающей скорректированные, повернутые и нормированные составляющие, с соответствующим результатом измерения удельного сопротивления и
определения качества оценки по результатам сравнения.
22. Прибор по п.21, приспособленный для использования, по меньшей мере, в процессе бурения и(или) скважинного каротажа.

Текст
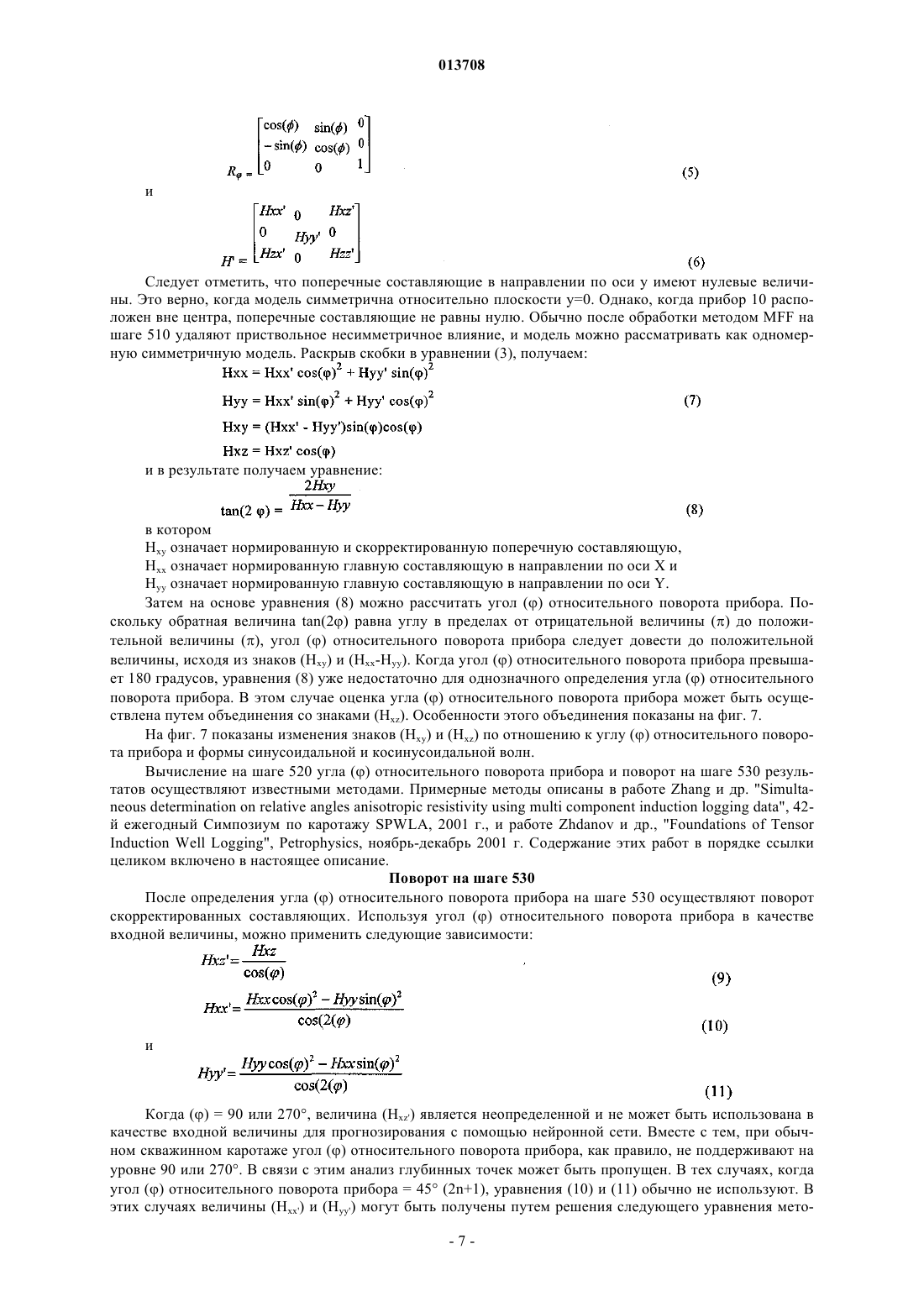
013708 Область техники, к которой относится изобретение Изобретение относится в целом к интерпретации результатов измерений, осуществляемых приборами скважинного каротажа, с целью определения свойств толщ горных пород. Более точно, в изобретении предложены методы определения углов наклона и азимутальных углов пласта с использованием данных индукционного каротажа. Уровень техники Приборы каротажа методом электромагнитной индукции и распространения волн широко применяются для определения электрических свойств окружающих ствол скважины пластов. С помощью этих каротажных приборов определяют кажущееся удельное сопротивление (или удельную проводимость) пласта, которое, если оно соответствующим образом интерпретировано, является показателем петрофизических свойств пласта и находящихся в нем флюидов. В тонкослоистых толщах пород с чередованием песка и сланца или глинисто-песчаных толщах пород электрическая анизотропия пласта становится важной для определения нефтегазонасыщенности по результатам измерений удельного сопротивления. Из-за сложности строения пласта, в особенности, колебаний относительного угла наклона оси скважины и наклона пласта, определение электрической анизотропии пласта может быть затруднено. Определение анизотропии и других количественных параметров осложняется отклонением скважины и вращением прибора. Существует потребность в усовершенствованных способах определения в реальном времени относительного поворота измерительного прибора и углов наклона пласта, которые обеспечивают пользователей информацией для последующего определения анизотропии пласта. Предпочтительно, чтобы способ последовательно обеспечивал точные и надежные данные и был эффективным с точки зрения вычислений. Краткое изложение сущности изобретения В изобретении предложен способ определения угланаклона пласта в процессе измерений, осуществляемых с помощью прибора индукционного каротажа, при осуществлении которого: с помощью прибора осуществляют сбор (регистрацию) результатов измерений множества главных составляющих(компонентов) и множества поперечных составляющих; обрабатывают результаты измерений для удаления и(или) исключения из них по меньшей мере приствольных влияний и(или) влияний смещения и получения в результате скорректированных составляющих; рассчитывают уголповорота прибора с использованием скорректированных составляющих; поворачивают выбранные скорректированные составляющие в направлении, в котором величина одной из поперечных составляющих становится равной нулю; обрабатывают повернутые составляющие с целью получения нормированных составляющих; и, исходя из скорректированных, повернутых и нормированных составляющих, прогнозируют по меньшей мере уголнаклона пласта с использованием по меньшей мере одной нейронной сети. В изобретении также предложен способ обучения по меньшей мере одной нейронной сети, при осуществлении которого: выбирают процессор для управления нейронной сетью; загружают в процессор по меньшей мере одну модель прогнозирования угла наклона пласта, исходя из результатов измерений,осуществляемых в стволе скважины с помощью прибора многокомпонентного индукционного каротажа; выбирают синтезированные данные по меньшей мере для одной модели, содержащей параметры прогнозирования угла наклона пласта; и загружают синтезированные данные в процессор для обучения по меньшей мере одной нейронной сети. Кроме того, в настоящем изобретении предлагается компьютерный программный продукт, хранящийся на машиночитаемом носителе и содержащий инструкции по прогнозированию угла наклона пласта, включающие команды на: использование прибора многокомпонентного индукционного каротажа,осуществления регистрации результатов измерений в стволе скважины множества главных составляющих и множества поперечных составляющих; обработку результатов измерений для удаления и(или) исключения из них по меньшей мере приствольных влияний и(или) влияний смещения и получения скорректированных составляющих; расчет углаповорота прибора с использованием скорректированных составляющих; поворот выбранных скорректированных составляющих в направлении, в котором величина одной из поперечных составляющих становится равной нулю; обработку повернутых составляющих с целью получения нормированных составляющих; и, исходя из скорректированных, повернутых и нормированных составляющих, прогноз по меньшей мере угланаклона пласта с использованием по меньшей мере одной нейронной сети. Далее, в настоящем изобретении предлагается прибор многокомпонентного индукционного каротажа, имеющий: множество генераторных катушек и множество приемных катушек, каждое из которых связано с электронным оборудованием, управляющим каждым из множеств катушек и связанным с процессором для приема результатов измерений множества главных составляющих и множества поперечных составляющих; при этом электронное оборудование способно осуществлять регистрацию результатов измерений множества главных составляющих и множества поперечных составляющих и передавать результаты измерений процессору для обработки; процессор обрабатывает результаты измерений с целью удаления и(или) исключения из результатов измерений по меньшей мере приствольных влияний-1 013708 и(или) влияний смещений; процессор также получает команды: рассчитать уголповорота прибора с использованием скорректированных составляющих; повернуть каждую из скорректированных составляющих в направлении, в котором величина одной из поперечных составляющих становится равной нулю; получить нормированные составляющие для каждой из главных составляющих и каждой из поперечных составляющих; и, исходя из повернутых и нормированных составляющих, прогнозировать по меньшей мере уголнаклона пласта с использованием по меньшей мере одной нейронной сети. Рассмотренные выше и другие признаки и преимущества настоящего изобретения будут более понятны специалистам из следующего далее подробного описания и чертежей. Краткое описание чертежей На прилагаемых чертежах одинаковые элементы обозначены одинаковыми позициями и представлено: на фиг. 1 - ствол скважины,на фиг. 2 - каротажный прибор,на фиг. 3A и 3 Б (в общем именуемых фиг. 3) - система земных координат и система координат пласта,на фиг. 4 - система координат прибора,на фиг. 5 - блок-схема, иллюстрирующая работу нейронной сети,на фиг. 6 - пример процесса определения углов относительного поворота и наклона пласта и контроля качества данных,на фиг. 7 - изменения знаков Hxy и Hxz относительно углаповорота,на фиг. 8 - гистограмма, иллюстрирующая статистическую погрешность при прогнозировании углов наклона,на фиг. 9-14 - результаты расчетов и прогнозирования для обучающей модели,на фиг. 15-17 - результаты расчетов и прогнозирования для обучения, извлеченные из действительных измерений, и на фиг. 18 - сравнения углов наклона пласта и относительных углов наклона согласно примеру алгоритма и методу обращения. Подробное описание изобретения Рассмотрим фиг. 1, на которой показан прибор 10 индукционного каротажа, расположенный в стволе 2 скважины. Ствол 2 скважины пробурен в земной толще 7 и проходит через пласты (формации) 4,которые имеют различные слои 4A-4 Е. Прибор 10 обычно спускают в ствол 2 скважины и извлекают из него с помощью армированного электрического кабеля 6 или подобного средства доставки, известного из уровня техники. Прибор 10 обычно состоит их трех узлов: блока 14 вспомогательного электронного оборудования на одном конце прибора 10, блока 8 катушек, соединенного с блоком 14 вспомогательного электронного оборудования, и блока 12 электронного оборудования, соединенного с другим концом блока 8 катушек, при этом блок 12 электронного оборудования обычно соединен с кабелем 6. Для обозначения каротажного прибора 10 в описании также может использоваться термин "инструмент 10" или "прибор 10 многокомпонентного индукционного каротажа". Блок 8 катушек содержит набор катушек, в который входят индукционные генераторные катушки и приемные катушки. Как пояснено далее, набор катушек служит для индуцирования электромагнитных полей в пластах 4 и приема сигналов напряжения, индуцированных токами Фуко, протекающими через пласты 4 в результате индуцирования в них электромагнитных полей. Блок 14 вспомогательного электронного оборудования обычно содержит приемник, средства обработки сигналов и средства телеметрии (не показаны). Блок 14 вспомогательного электронного оборудования также обычно содержит генератор сигналов и усилители мощности (не показаны), обеспечивающие протекание переменных токов выбранных частот через генераторные катушки блока 8 катушек. В стандартных вариантах осуществления блок 12 электронного оборудования содержит приемные контуры (не показаны) для обнаружения сигналов напряжения, индуцированных в приемных катушках блока 8 катушек, и контуры для преобразования этих принимаемых сигналов напряжения (не показаны) в сигналы, отображающие удельную проводимость различных слоев 4A-4 Е пластов 4. Для удобства блок 12 электронного оборудования обычно содержит средства телеметрии для передачи отображающих удельную проводимость сигналов на поверхность земли 7 по кабелю 6 для последующей обработки. В качестве альтернативы, блок 12 электронного оборудования может хранить отображающие удельную проводимость сигналы в соответствующем регистрирующем устройстве (не показано) для обработки после извлечения инструмента 10 из ствола 2 скважины. На фиг. 2 проиллюстрирован один из вариантов выполнения набора катушек 3, в который входят генераторные катушки и приемные катушки. Три генераторные катушки 101, 103 и 105, обозначенные как генераторы Tx, Tz и Ty, ориентированы преимущественно ортогонально (ось z проходит продольно оси прибора, как это указано в условных обозначениях). Генераторные катушки 101, 103 и 105 генерируют магнитные поля для осуществления измерений в пластах 4, окружающих ствол 2 скважины. Генераторным катушкам 101, 103 и 105 соответствуют приемные катушки 107, 109 и 111, обозна-2 013708 ченные как приемники Rx, Rz и Ry, соответственно. Приемные катушки 107, 109 и 111 измеряют особенности соответствующих магнитных полей и ориентированы преимущественно ортогонально друг другу. Могут быть предусмотрены дополнительные приемные катушки 113 и 115 для измерения двух поперечных составляющих (компонент) Нху и Hxz магнитного поля (Н), генерируемого генератором составляющей по оси х. Одним из не ограничивающих примеров прибора 10 является прибор индукционного каротажа 3DExplorer компании "Бейкер Хьюз" (Хьюстон, штат Техас). Следует отметить, что на фиг. 2 показан один из вариантов осуществления каротажного прибора 10,которым он не ограничен. Например, в других вариантах осуществления не предусмотрены дополнительные катушки 113, 115. Дополнительными примерами служат варианты осуществления, в которых генераторные катушки и приемные катушки имеют иную или переменную ориентацию. Обычно каротажный прибор 10 по мере необходимости адаптируют к работе в процессе бурения или после осуществления бурения. Как указано выше, прибор 10 и его особенности в целом описаны на примере не ограничивающего варианта его осуществления, реализованного в приборе 10 3DExplorer. Дополнительная информация о приборе 10 может быть почерпнута из работы Kriegshauser и др. "A New Multicomponent Induction Logging Tool to Resolve Anisotropic Formations", 41-й ежегодный Симпозиум по каротажу SPWLA (Общество специалистов по анализу данных промысловой геофизики), 4-7 июня 2000 г., содержание которой в порядке ссылки целиком включено в настоящее описание. Как указано выше, для обработки данных многокомпонентного индукционного каротажа используют четыре системы координат. Этими четырьмя системами координат являются система координат земли 7, система координат пласта 4, система координат прибора 10 и система координат катушек 3. В стандартных вариантах осуществления и, как условно принято в описании, система координат земли 7 имеет вертикальную ось Z, проходящую в направлении силы тяжести, продольную ось X, указывающую на магнитный север, и поперечную ось Y, указывающую на магнитный восток. Три остальные системы координат заданы системой 20 земных координат, показанной на фиг. 3 А. На фиг. 3 А показана система 20 земных координат, оси которой описаны в предыдущем абзаце. Также показана система 21 координат пласта относительно системы 20 земных координат. Вертикальная ось Z системы 21 координат пласта проходит перпендикулярно плоскости 5 напластования, а продольная ось Xf и поперечная ось Yf лежат на плоскости 5 напластования, при этом каждая из осей (Zf, Xf, Yf) ориентирована ортогонально остальным осям. Два угла пласта, обозначенные как угол (') наклона пласта и азимутальный угол (Ф) пласта, описывают зависимость между системой 20 земных координат и системой 21 координат пласта. Обычно угол (') наклона пласта и азимутальный угол (Ф) пласта определяют путем обработки методом обращения. Система координат прибора показана на фиг. 3 Б. Как показано на фиг. 3 Б, вертикальная ось Z системы 22 координат прибора описывает траекторию ствола 2 скважины и проходит перпендикулярно плоскости 9 прибора. Продольная ось X и поперечная ось Y системы 22 координат прибора лежат на плоскости прибора, при этом каждая из осей (Z, X, Yt) ориентирована ортогонально остальным осям. Зависимость системы 22 координат прибора от системы 20 земных координат описывается углом наклона прибораи азимутальным углом прибора (Г). На фиг. 4 проиллюстрировано сочетание систем координат. Более точно, показана взаимозависимость системы 21 координат пласта, системы 22 координат прибора и системы 23 координат катушек. На фиг. 4 также показана плоскость 1 наклона. Плоскость 1 наклона описывается системой 23 координат катушек и имеет продольную ось Xc, поперечную ось Yc и вертикальную ось Zc. Вертикальная ось Z системы 23 координат катушек совпадает с вертикальной осью Zt системы 22 координат прибора, а поперечная ось Yc системы 23 координат катушек отклонена от поперечной оси Y системы 21 координат пласта на азимутальный угол (Ф) пласта. Уголотносительного поворота прибора (не показан на фиг. 4) описывается углом между продольной осью Xc системы 23 координат катушек и верхней частью ствола 2 скважины. Во время работы прибор 10 измеряет соосные и копланарные составляющие, которые называют главными составляющими, а также измеряет поперечные составляющие. В результате этих измерений получают информацию, позволяющую среди прочего определять удельное сопротивление и анизотропию пласта 4. Из этой информации можно получить или извлечь другую существенную информацию. Например, исходя из данных ориентации прибора, можно определить угол (') наклона пласта и азимутальный угол (Ф) пласта. Как указано выше, для контроля качества данных и определения угла (') наклона пласта и азимутального угла (Ф) пласта в реальном или почти реальном времени могут выгодно использоваться алгоритмы, в основу которых положены нейронные сети и которые действуют в нейронных сетях. Используемый в описании применительно к формированию данных термин "в реальном времени" означает формирование данных со скоростью, применимой или достаточной для принятия решений на протяжении или одновременно с технологическими процессами, такими как добыча, экспериментальные работы, проверка и исследования или работы других типов, которые может предпочесть пользователь. В качестве не ограничивающего примера, измерения и расчеты в реальном времени могут обеспечивать-3 013708 пользователей информацией, необходимой для проведения желаемых корректировок в процессе бурения. В одном из вариантов осуществления корректировки возможны на постоянной основе (в соответствии со скоростью бурения), а в другом варианте осуществления для проведения корректировок может потребоваться периодическое прекращение бурения для оценки данных. Соответственно, подразумевается, что термин "в реальном времени" следует интерпретировать с учетов контекста, и он необязательно означает мгновенный анализ данных или предполагает какую-либо периодичность регистрации и анализа данных. В настоящем изобретении обеспечивается высокий уровень контроля качества данных. В основу контроля качества положена непротиворечивость данных, и он обычно осуществляется в реальном времени. Более точно, непротиворечивость данных может быть определена путем сравнения прогнозированных (исходя из измеренных главных составляющих) поперечных составляющих и измеренных поперечных составляющих. Пользователь может преимущественно ввести желаемый допуск на контроль качества данных и тем самым уравновесить быстроту анализа данных и степень качества данных. В стандартных вариантах осуществления нейронную сеть обучают с использованием синтезированных данных, извлеченных из ряда моделей. Ряд моделей может быть охарактеризован или может содержать переменные величины горизонтального удельного сопротивления пласта 4, коэффициентов анизотропии, толщины слоев, углов (') наклона пласта, азимутальных углов (Ф) пласта, угловнаклона прибора, азимутальных углов (Г) прибора, угловотносительного поворота прибора и других входных параметров, которые могут быть сочтены уместными при обучении нейронной сети. Рассмотрим фиг. 5, на которой показана примерная схема осуществляемого в реальном времени контроля качества и анализа данных с использованием нейронной сети 110. Как показано на фиг. 5, для получения данных 10 измерений используют прибор 10. Генератор 101 данных процессора 100 использует данные 51 измерений с целью получения расчетных данных 52 известными из уровня техники методами. Данные 51 измерений и расчетные данные 52 группируют во входные данные 50, и их использует нейронная сеть 110 с целью получения выходных данных 105. Следует отметить, что используемый в данном контексте термин "расчет" может включать оценку и другие методы определения количественных величин. Более точно, расчетные данные 52 могут включать данные, полученные по меньшей мере одним из способов, включающих расчет, оценку и применение нейронных сетей 110. Таким образом, используемый в данном контексте термин "расчет" следует понимать как формирование данных, которыми могут являться по меньшей мере дополнительные данные и(или) избыточные данные. Соответственно, расчетные данные не ограничены результатами арифметических вычислений и включают такие дополнительные данные и избыточные данные, описанные в изобретении или известные специалистам в данной области техники. В стандартных вариантах осуществления нейронная сеть 110 содержит данные, команды и информацию (которую считает уместной пользователь) для получения расчетных данных 52. Например, нейронная сеть 110 может содержать полученный эмпирическим путем алгоритм для прогнозирования или оценки расчетных данных 52, исходя из данных 51 измерений. Алгоритм может быть получен рядом методов, включая использование синтезированных данных. В вариантах осуществления с использованием синтезированных данных данные вводят в нейронную сеть 110. Затем получают выходные данные нейронной сети 110, и корректируют алгоритм (который также именуется в настоящем описании "моделью") с целью получения желаемых выходных данных. Этот процесс, который можно именовать обучением,настройкой, калибровкой (или иным подобным образом), может использоваться для определения желаемых количественных величин. Обычно нейронная сеть 110 обеспечивает реализацию теорий оптимизации и статистическую оценку. Специалисту в данной области техники будет ясно, что такие методы также могут быть скорректированы применительно к определенным расчетам. Кроме того, такие методы обучения могут осуществляться во время по меньшей мере запуска процесса и(или) на постоянной основе (т.е, когда нейронная сеть 110 "обучается"). Особенности нейронной сети 110 более подробно рассмотрены далее. Особенности выходных данных 105 нейронной сети 110 сравнивают с данными 51 измерений путем использования механизма 111 контроля качества. В зависимости от информации обратной связи,поступающей от механизма 111 контроля качества, нейронная сеть 110 может осуществить (или нет) пересчет расчетных данных 52. Иными словами, при наличии удовлетворительной корреляции между данными 51 измерений (поперечными составляющими) и прогнозами поперечных составляющих качество расчетных данных 52 является удовлетворительным. Вместе с тем, если прогнозы поперечных составляющих неприемлемо отклоняются от данных 51 измерений (поперечных составляющих), прогноз обычно уточняют путем дополнительного применения нейронной сети 110. Выходные данные 105 могут выгодно использоваться по меньшей мере для быстрой оценки особенностей пласта 4 и(или) корректировки добычи. В качестве одного из не ограничивающих примеров выходные данные 105 могут использоваться для разработки и создания команд 115, регулирующих использование прибора 10. Более точно, выходные данные 105 могут служить для операторов информацией, инициирующей формирование команд 115, например, корректирующих направление бурения. Как указано выше, процессор 100 имеет известные компоненты, применяемые в вычислительных-4 013708 системах. Например, процессор 100 может иметь любой один или несколько из компонентов, включающих запоминающие системы, устройства ввода, устройства вывода, память, системную шину, аудио- и видеоустройства и другие. Поскольку такие компоненты известны из техники и не являются частью описываемого изобретения, они обычно не рассматриваются далее. Для формирования и обучения нейронной сети 110 используют синтезированные данные. Поскольку синтезированные данные имитированы многоуровневым одномерным кодом, а промысловые данные содержат приствольные влияния, с целью ослабления этих влияний как к синтетическим, так и промысловым данным применяют метод многочастотной фокусировки (MFF, от английского - multi-frequencyfocusing). Обработка методом MFF известна из техники. Можно сослаться на работу Yu и др. "The Reduction Of Near Zone Effects On The Multi Component Induction Logging Tool", Общество инженеровнефтяников, 2003 г., а также работу Rabinovich и др. "Enhanced Anisotropy Joint Processing Of MultiComponent And Multi-Array Induction Tools", 42-й ежегодный Симпозиум по каротажу SPWLA, 2001 г.,содержание которых в порядке ссылки целиком включено в настоящее описание. Хотя поворот прибора 10 относительно севера известен, уголотносительного поворота прибора не известен и зависит от направления простирания пласта, которое может меняться в зависимости от глубины. Уголотносительного поворота прибора может быть определен с помощью простой формулы. Как указано выше, уголотносительного наклона пласта определяют, исходя непосредственно из результатов измерений прибором с использованием нейронной сети 110. После создания нейронной сети 110 с использованием выбранных моделей определение углаотносительного наклона пласта становится не зависящим от модели и очень быстрым. Качество данных может быть обеспечено до оценки углаотносительного поворота прибора и углаотносительного наклона пласта путем сравнения измеренной поперечной составляющей (Hxz) и поперечной составляющей (Hxz), прогнозированной, исходя из трех главных составляющих с использованием другой обученной нейронной сети 110. Для понимания получаемых данных, в первую очередь, важно рассмотреть особенности прибора. Как показано на фиг. 2, прибор 10 индукционного каротажа обычно (по меньшей мере в рассматриваемых вариантах осуществления) имеет ряд генераторов 101, 103, 105 и ряд приемников 107, 109, 111. Во время работы прибор 10 формирует набор данных (Н) магнитного поля, имеющий девять составляющих. Пять из этих составляющих (Нхх, Нуу, Hzz, Hxy, Hxz) являются однозначно определяемыми для набора. Можно сослаться на работу В. Kriegshauser и др. "A New Multicomponent Induction Logging Tool toResolve Anisotropic Formations", 41-й ежегодный Симпозиум по каротажу SPWLA, 2000 г., в которой описан прибор многокомпонентного индукционного каротажа. Содержание этой работы в порядке ссылки целиком включено в настоящее описание. Обычно прибор 10 осуществляет в общей сложности пятьдесят измерений, включающих измерения пяти однозначно определяемых составляющих (Hxx, Нуу, Hzz, Hxy, Hxz) с использованием десяти отдельных или различимых частот. В данном варианте осуществления разнос между соответствующим генератором и приемником равен 1,6 м для трех главных составляющих (Нхх, Нуу, Hzz), 2,0 м для составляющей(Hxz) и 2,4 м для составляющей (Нху). Уголповорота прибора может меняться в пределах от 0 до 360 градусов. Уголнаклона пласта составляет от 0 до 90. Помимо рассмотренных особенностей описанных методов, для устранения приствольных влияний к каждой составляющей магнитного поля применяют метод многочастотной фокусировки (MFF). После обработки методом MFF ослабляется или устраняется любое приствольное влияние или систематическая ошибка данных вследствие разноса между рядом генераторов 101, 103, 105 и рядом приемников 107, 109,111. Обычно для определения относительного угла поворота на основании скорректированных данных,полученных в результате обработки методом MFF, могут использоваться простые формулы. После определения углаотносительного поворота прибора скорректированные данные поворачивают в положение главного направления (0 относительно углаповорота прибора). После поворота повернутая поперечная составляющая (Нху') становится равной нулю, а главная составляющая (Hzz) остается без изменений. Остальные составляющие измерений помечают соответствующими штрихами ('). На основании повернутых составляющих (Hxx'), (Нуу'), (Hxz') и не изменившейся составляющей (Hzz) прогнозируют уголотносительного наклона пласта с использованием обученной нейронной сети 110. Обычно нейронную сеть 110 обучают путем использования существенного количества данных, которые содержат или которые получают из различных параметров модели, включая такие параметры, как горизонтальное удельное сопротивление, коэффициент анизотропии и толщина, а также путем использования существенного числа моделей (по обстоятельствам). Исходя из нормированных главных составляющих (Нхх'), (Hyy') и (Hzz'), прогнозируют нормированное значение поперечной составляющей (Hxz'). Качество измерений можно определить путем контроля непротиворечивости измеренной нормированной составляющей (Hxz') и прогнозированной нормированной составляющей (Hxz'). Обычно при высокой непротиворечивости измерений таким же высоким является и качество данных. В некоторых вариантах осуществления в расчете на обычные ситуации выбирают параметры моде-5 013708 ли с горизонтальным удельными сопротивлениями 1, 3, 9 и 27 Омм, коэффициентами анизотропии 1, 3 и 9 (которые используют для получения соответствующих вертикальных удельных сопротивлений) и толщинами слоев 4 А-4 Е 1, 2 и 3 м. Таким образом, с учетом всех возможных сочетаний получают глубинный разрез пласта 4, имеющего 743 слоя. Для прибора 10 формируют синтезированные характеристики с использованием одномерного кода (например, DIPMAG) для различных угловнаклона пласта и различных угловотносительного поворота прибора. В данном варианте осуществления используют углынаклона пласта,составляющие 0, 15, 23, 30, 38, 45, 50, 54, 60, 65, 70, 75, при фиксированном углеотносительного поворота прибора, равном 0. Уголотносительного поворота прибора меняется от 0 до 360 с шагом в 15 при углах наклона в 30 и 60. Затем, исходя из этой модели, в данном варианте осуществления рассчитывают пять соотнесенных составляющих (Hxx), (Hyy), (Hzz), (Hxy) и (Hxz) и две поперечные составляющие (Hxy) и (Hxz) действительного разноса. Для лучшего понимания способа 500 определения углов поворота и наклона далее более подробно пояснен каждый шаг его осуществления со ссылкой на примерный способ согласно идеям настоящего изобретения. Рассмотрим фиг. 6, на которой показан пример способа 500 определения углаотносительного поворота прибора и угла (') наклона пласта. После поступления данных от прибора 10 на шаге 510 осуществляют обработку данных 51 измерений методом MFF. Затем на шаге 520 осуществляют расчет угла поворота. Уголотносительного поворота прибора используют для поворота на шаге 530, прогнозирования на шаге 540 угла наклона пласта, прогнозирования на шаге 550 составляющей Hxz' и формирования на шаге 560 выходных данных. На фиг. 6 также показаны особенности настоящего изобретения, согласно которым способ 500 предусматривает использование нейронной сети 110, обычно на шаге 560 формирования выходных данных для прогнозирования нормированной составляющей Hxz/S. Затем может быть осуществлен контроль качества данных путем сравнения прогнозированной величины нормированной составляющей Hxz/S и измеренной величины нормированной составляющей Hxz/S. Обработка методом многочастного фокусирования на шаге 510 На данных, регистрируемых прибором 10, всегда до определенной степени сказывается влияние диаметра скважины и проникновения (фильтрата). В одном из вариантов осуществления на шаге 510 осуществляют обработку методом MFF измеренных характеристик прибора 10 с целью по меньшей мере ослабления или устранения приствольного влияния, чтобы можно было использовать одномерную многоуровневую модель. Если в качестве выходных данных обработки методом MFF на шаге 510 получают удельную проводимость , пользователю необходимо осуществить обратное преобразование выходных данных в данные магнитного поля (Н) для последующей обработки с целью определения углаотносительного поворота прибора угла (') относительного наклона пласта. Таким образом, при обработке методом многочастного фокусирования (MFF) на шаге 510 зависимость между удельной проводимостью и данными магнитного поля (Н) задана одним из следующих уравнений: и в которых K означает постоянный коэффициент для описания особенностей прибора 10. Кроме того, обработку методом MFF на шаге 510 обычно применяют с целью учета и удаления и(или) исключения из результатов измерений систематической ошибки, возникающей из-за смещений - разницы в разносе между генераторными катушками 101, 103, 105 и приемными катушками 107, 109, 111. В контексте настоящего изобретения обработка методом MFF на шаге 510 (и другие подобные методы корректировки результатов измерений) обеспечивает получение скорректированных составляющих. Расчет углаповорота на шаге 520 Расчет углаотносительного поворота прибора обычно осуществляют посредством нескольких операций. При этом для обозначения различных составляющих при нулевом углеповорота используется штрих. При любом углеповорота задано следующее уравнение: в котором: Следует отметить, что поперечные составляющие в направлении по оси у имеют нулевые величины. Это верно, когда модель симметрична относительно плоскости у=0. Однако, когда прибор 10 расположен вне центра, поперечные составляющие не равны нулю. Обычно после обработки методом MFF на шаге 510 удаляют приствольное несимметричное влияние, и модель можно рассматривать как одномерную симметричную модель. Раскрыв скобки в уравнении (3), получаем:Hxy означает нормированную и скорректированную поперечную составляющую,Hxx означает нормированную главную составляющую в направлении по оси Х и Нуу означает нормированную главную составляющую в направлении по оси Y. Затем на основе уравнения (8) можно рассчитать уголотносительного поворота прибора. Поскольку обратная величина tan(2) равна углу в пределах от отрицательной величиныдо положительной величины , уголотносительного поворота прибора следует довести до положительной величины, исходя из знаков (Нху) и (Нхх-Нуу). Когда уголотносительного поворота прибора превышает 180 градусов, уравнения (8) уже недостаточно для однозначного определения углаотносительного поворота прибора. В этом случае оценка углаотносительного поворота прибора может быть осуществлена путем объединения со знаками (Hxz). Особенности этого объединения показаны на фиг. 7. На фиг. 7 показаны изменения знаков (Нху) и (Hxz) по отношению к углуотносительного поворота прибора и формы синусоидальной и косинусоидальной волн. Вычисление на шаге 520 углаотносительного поворота прибора и поворот на шаге 530 результатов осуществляют известными методами. Примерные методы описаны в работе Zhang и др. "Simultaneous determination on relative angles anisotropic resistivity using multi component induction logging data", 42 й ежегодный Симпозиум по каротажу SPWLA, 2001 г., и работе Zhdanov и др., "Foundations of TensorInduction Well Logging", Petrophysics, ноябрь-декабрь 2001 г. Содержание этих работ в порядке ссылки целиком включено в настоящее описание. Поворот на шаге 530 После определения углаотносительного поворота прибора на шаге 530 осуществляют поворот скорректированных составляющих. Используя уголотносительного поворота прибора в качестве входной величины, можно применить следующие зависимости: Когда= 90 или 270, величина (Hxz') является неопределенной и не может быть использована в качестве входной величины для прогнозирования с помощью нейронной сети. Вместе с тем, при обычном скважинном каротаже уголотносительного поворота прибора, как правило, не поддерживают на уровне 90 или 270. В связи с этим анализ глубинных точек может быть пропущен. В тех случаях, когда уголотносительного поворота прибора = 45 (2n+1), уравнения (10) и (11) обычно не используют. В этих случаях величины (Hxx') и (Hyy') могут быть получены путем решения следующего уравнения мето-7 013708 дом наименьших квадратов: в котором (Hxy) соответствует полю с скорректированным разносом. Хотя уравнение (12) может использоваться при любом углеповорота, величина (Hxy) вносит определенную погрешность. В связи с этим не рекомендуется использовать уравнение (12) при произвольном повороте. Обычно в случае использования уравнений (9)-(11) получают меньшую погрешность при повороте скорректированных составляющих на шаге 530. Прогнозирование угла наклона на шаге 540 Уголнаклона пласта обычно определяют с помощью нейронной сети 110, обученной отображать зависимость между угломнаклона пласта и скорректированными составляющими, определенными в результате обработки методом MFF на шаге 510. Нейронную сеть 110 обычно обучают с использованием синтезированных характеристик обработанных методом MFF составляющих (Hxx'), (Hyy'), (Hzz),(Hxz') различных одномерных моделей. Эти модели обычно выбирают, исходя из нулевого углаотносительного поворота прибора и различных угловнаклона пласта, обычно в пределах от около 0 до около 75. Использование нейронных сетей выгодно по ряду причин. Например, хотя в случае толстого слоя пласта 4 используют приближение, влияния прилегающих пластов обычно затрагивают или нарушают точность определения угланаклона пласта. В тоже время, известно, что обращение угла (') относительного наклона пласта и измерений удельного сопротивления является трудоемким процессом. Кроме того, при этом необходимо выбрать соответствующее окно для обращения. Что касается использования нейронных сетей и желания свести к минимуму влияния удельной проводимости в используемых моделях, в качестве входных величин моделей используют составляющие,нормированные путем инвариантного суммирования поворотов (Hxx') + (Hyy') + (Hzz). Важно отметить,что суммирование остается зависящим от угланаклона пласта, поскольку относительное местоположение генераторных катушек 101, 103, 105 и приемных катушек 107, 109, 111 меняется с изменениями угланаклона пласта. Соответственно, используют трехуровневую модель нейронной сети с десятью скрытыми нейронами в скрытом уровне. В этом случае входными величинами нейронной сети являются четыре скорректированные составляющие, подвергнутые обработке методом MFF. Выходной величиной нейронной сети 110 будет являться уголнаклона пласта. Результаты обучения могут быть оценены путем проверки погрешностей прогнозированных угловнаклона пласта относительно истинных угловнаклона пласта. Рассмотрим фиг. 8, на которой приведена гистограмма погрешностей. Гистограмма показывает, что статистическая погрешность прогнозированного угланаклона пласта относительно фактического угланаклона пласта по большей части находится в пределах около одного градуса. На фиг. 9-14 проиллюстрированы результаты расчетов и прогнозирования для обучающей модели. На фиг. 9 показаны результаты расчетов и прогнозирования для обучающей модели при угленаклона пласта около 30 и углеотносительного поворота прибора около 0. На фиг. 10 показаны результаты расчетов и прогнозирования для обучающей модели при угленаклона пласта около 60 и углеповорота около 0. На фиг. 11 показаны результаты расчетов и прогнозирования для обучающей модели при угленаклона пласта около 75 и углеповорота около 0. На фиг. 12 показаны результаты расчетов и прогнозирования для обучающей модели при угленаклона пласта 60 и углеповорота около 30. На фиг. 13 показаны результаты расчетов и прогнозирования для обучающей модели при угле наклона пласта 60 градусов и углеповорота около 150. Наконец, на фиг. 14, показаны результаты расчетов и прогнозирования для обучающей модели при угле (9) наклона пласта 60 градусов и углеповорота около 240. С целью проверки достоверности процесса было проведено несколько испытаний. Для первого испытания использовали тот же стандартный профиль, что и для обучения. Вместе с тем, для первого испытания использовали отличающийся угол наклона пласта. Результаты первого испытания показаны на фиг. 15. Для второго испытания использовали стандартный профиль, полученный на основании реальных каротажных данных. Для второго испытания использовали постоянный угол наклона пласта и постоянный угол поворота. Результаты второго испытания показаны на фиг. 16. Для третьего испытания использовали тот же стандартный профиль, что и для второго испытания, но меняли угол поворот от около 0 до около 360. В третьем испытании углынаклона пласта также меняли от около 30 до около 45. Результаты третьего испытания показаны на фиг. 17. В окончательном испытании применили весь алгоритм к реальным каротажным данным. На фиг. 18 показаны результаты применения примерного алгоритма в сравнении с результатами, полученными методом обращения. Как азимутальный угол (Ф)-8 013708 пласта, так и уголнаклона пласта в целом или преимущественно согласуются друг с другом (смотри векторные диаграммы на первой дорожке). Углыотносительного наклона пласта, определенные с использованием нейронной сети и методом обращения, также отлично согласуются. Эти результаты представлены на диаграмме под первой колонкой. Обычно считается, что, когда величина поперечной составляющей (Нху,) близка к нулю, может быть сложным определить уголотносительного поворота прибора. Например, когда угол поворота произвольно выбирают в толстом изотропном слое пласта 4. В таком случае пользователь может пропустить один из результатов обработки соответствующих данных или принять за результат обработки данных предыдущий относительный уголповорота. Следует также отметить, что, когда величина поперечной составляющей (Hxz) близка к нулю, уголповорота может быть определен с неточностью в 180. После определения угла (') относительного наклона пласта углаотносительного поворота прибора пользователь может определить уголнаклона пласта и азимутальный угол (Ф) пласта с помощью следующих формул:DEV означает отклонение ствола скважины.,DAZ означает азимутальный угол ствола скважины,(') означает угол относительного наклона пласта и означает угол относительного поворота прибора. По завершении описанных расчетов можно определить горизонтальную и вертикальную удельные проводимости пласта с помощью программного обеспечения для осуществления обращений. Как показывают исследования синтезированных моделей, уголотносительного поворота прибора может быть определен с точностью до около 0,5, а уголотносительного наклона пласта с точностью до около 2, не считая указанных выше исключений. Примеры как синтезированных, так и реальных данных показывают, что качество данных может соответствующим образом контролироваться путем прогнозирования поперечных составляющих исходя из главных составляющих. Несмотря на то что изобретение описано со ссылкой на примеры осуществления, специалисту в данной области техники будет ясно, что в него могут быть внесены различные изменения, не выходящие за пределы объема изобретения, а его элементы могут быть заменены эквивалентами. Кроме того, с целью адаптации конкретной ситуации или материала к идеям изобретения может быть предложено множество усовершенствований, не выходящих за пределы его существа и объема. Таким образом, предполагается, что изобретение не ограничено частными вариантами осуществления, раскрытыми в качестве предпочтительных вариантов осуществления настоящего изобретения, и охватывает варианты осуществления, входящие в объем приложенной формулы изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения параметра пласта с использованием метода индукционного каротажа, при осуществлении которого с помощью прибора собирают результаты многокомпонентных измерений пласта посредством индукционного каротажа,проводят их обработку методом многочастного фокусирования, по меньшей мере, для ослабления и(или) исключения приствольных влияний и оценивают параметр пласта, используя нейронную сеть. 2. Способ по п.1, в котором параметром пласта является по меньшей мере один из группы, включающей горизонтальное удельное сопротивление пласта, коэффициент анизотропии пласта, угол наклона пласта, угол поворота прибора и толщину пласта. 3. Способ по п.1, в котором при обработке методом многочастного фокусирования (MFF) используют следующее уравнение: где K - постоянная, описывающая особенности прибора,H - данные магнитного поля и- удельная проводимость. 4. Способ по п.3, при осуществлении которого поворачивают скорректированные составляющие в-9 013708 направлении, в котором величина одной из поперечных составляющих становится равной нулю. 5. Способ по п.4, в котором при повороте используют следующее уравнение: где Hxy - нормированная и скорректированная поперечная составляющая Hxy,Hxx - нормированная главная составляющая в направлении по оси X,Hyy - нормированная главная составляющая в направлении по оси Y, - угол поворота,Hxx' - повернутая составляющая Hxx иHyy' - повернутая составляющая Hyy. 6. Способ по п.4, в котором дополнительно обрабатывают повернутые составляющие для получения нормированных составляющих. 7. Способ по п.6, в котором дополнительно определяют качество оценки путем сравнения по меньшей мере одной из составляющих из группы, включающей скорректированные, повернутые и нормированные составляющие, с соответствующей измеренной составляющей и определения качества оценки по результатам сравнения. 8. Способ по п.1, в котором упомянутые измерения включают многочастотные измерения. 9. Способ по п.1, в котором уголповорота прибора определяют, исходя из следующей зависимости: в которой Hxy - нормированная и скорректированная поперечная составляющая Нху,Hxx - нормированная главная составляющая в направлении по оси X иHyy - нормированная главная составляющая в направлении по оси Y. 10. Способ по п.1, в котором нормируют данные, вводимые в нейронную сеть, путем инвариантного суммирования поворотов с использованием следующей зависимости: где Hxx' - повернутая составляющая Нхх,Hyy' - повернутая составляющая Нуу иHzz - нормированная главная составляющая в направлении по оси Z. 11. Способ по п.1, в котором используют нейронную сеть в реальном времени. 12. Способ по п.1, в котором осуществляют оценку в процессе бурения ствола скважины. 13. Способ обучения нейронной сети, при осуществлении которого выбирают модель, отображающую пласт, вычисляют набор синтезированных данных для множества составляющих, спрогнозированных для использования каротажного прибора в пласте, соответствующем модели, при этом набор синтезированных данных формируют с использованием одномерного кода и загружают набор синтезированных данных и модель в нейронную сеть. 14. Способ по п.13, в котором модель содержит по меньшей мере один из параметров, включающих горизонтальное удельное сопротивление пласта, коэффициент анизотропии пласта, угол наклона пласта,угол поворота прибора и толщину пласта. 15. Способ по п.13, в котором формируют набор синтезированных данных по меньшей мере для одной особенности пласта, выбранной из группы, включающей множество величин горизонтального удельного сопротивления, множество коэффициентов анизотропии, множество величин толщины, множество углов наклона пласта и множество углов поворота прибора. 16. Способ по п.13, в котором набор синтезированных данных содержит по меньшей мере один из результатов измерений из группы, включающей скорректированные, повернутые и нормированные результаты измерений. 17. Машиночитаемый носитель с компьютерным программным продуктом, предназначенным для осуществления оценки параметра пласта и содержащим команды на: использование прибора для регистрации данных многокомпонентных измерений пласта посредством индукционного каротажа,обработку результатов измерений методом многочастного фокусирования по меньшей мере для ослабления и(или) исключения приствольных влияний и использование нейронной сети для оценки параметра пласта. 18. Носитель по п.17, дополнительно содержащий команды по определению качества оценки путем сравнения по меньшей мере одной из составляющих из группы, включающей скорректированные, повернутые и нормированные составляющие, с соответствующей измеренной составляющей и определения качества оценки по результатам сравнения. 19. Носитель по п.17, дополнительно содержащий команды по выработке управляющих сигналов- 10013708 для регистрации данных. 20. Носитель по п.17, дополнительно содержащий команды для оценки параметра пласта в процессе бурения ствола скважины. 21. Прибор многокомпонентного индукционного скважинного каротажа, содержащий множество генераторных катушек и множество приемных катушек для осуществления измерений удельного сопротивления, каждое из которых связано с электронным оборудованием, которое, в свою очередь, связано с процессором для приема результатов измерений главных составляющих и поперечных составляющих удельного сопротивления,при этом процессор снабжен машиночитаемыми командами на осуществление обработки результатов измерений методом многочастного фокусирования для удаления и(или) исключения, по меньшей мере, приствольных влияний и(или) влияний смещения и получения в результате скорректированных составляющих,поворота каждой из скорректированных составляющих в направлении, в котором величина одной из поперечных составляющих становится равной нулю,получения нормированных составляющих для главных и поперечных составляющих,оценки параметра пласта с использованием нейронной сети,определения качества оценки путем сравнения по меньшей мере одной из составляющих из группы,включающей скорректированные, повернутые и нормированные составляющие, с соответствующим результатом измерения удельного сопротивления и определения качества оценки по результатам сравнения. 22. Прибор по п.21, приспособленный для использования, по меньшей мере, в процессе бурения и(или) скважинного каротажа.
МПК / Метки
Метки: качества, данным, определение, пласта, осуществляемые, каротажа, многокомпонентного, сетей, реальном, контроль, нейронных, использованием, времени, углов, индукционного, данных
Код ссылки
<a href="https://eas.patents.su/17-13708-kontrol-kachestva-dannyh-i-opredelenie-uglov-plasta-osushhestvlyaemye-v-realnom-vremeni-po-dannym-mnogokomponentnogo-indukcionnogo-karotazha-s-ispolzovaniem-nejjronnyh-setejj.html" rel="bookmark" title="База патентов Евразийского Союза">Контроль качества данных и определение углов пласта, осуществляемые в реальном времени по данным многокомпонентного индукционного каротажа с использованием нейронных сетей</a>
Способ интерпретации сейсмических фаций с использованием текстурного анализа и нейронных сетей
Номер патента: 4551
Опубликовано: 24.06.2004
Авторы: Уэст Брайан П., Мэй Стивен Р.
МПК: G01V 7/00
Метки: текстурного, сетей, использованием, анализа, сейсмических, фаций, способ, нейронных, интерпретации
Формула / Реферат:
1. Способ идентификации сейсмических фаций в объеме сейсмических данных, заключающийся в том, что (a) вычисляют множество начальных текстурных атрибутов, характеризующих объем сейсмических данных, (b) конструируют вероятностную нейронную сеть на основании вычисленных начальных текстурных атрибутов, (c) вычисляют классификацию фаций в части объема сейсмических данных, (d) повторяют шаги с (a) по (c) до тех пор, пока вычисленные классификации...
Использование скоростей кусочков породы для прогнозирования в реальном времени порового давления и градиента давления гидравлического разрыва пласта
Номер патента: 5450
Опубликовано: 24.02.2005
Авторы: Майерс Майкл Толберт, Тутунку Азра Нур, Арастех Мохаммад Майкл
МПК: E21B 49/00
Метки: реальном, градиента, порового, прогнозирования, породы, разрыва, использование, пласта, кусочков, давления, скоростей, времени, гидравлического
Формула / Реферат:
1. Способ прогнозирования порового давления во время бурения по кусочкам породы, заключающийся в том, что a) получают кусочки породы при бурении, b) вычисляют скорость по кусочкам породы, используя метод незатухающих гармонических колебаний, c) вычисляют пористость f пласта, d) используют пористость f для вычисления вертикального эффективного напряжения sv согласно уравнению sv=smax(1-f)a, где smax и a - постоянные параметры, зависящие от...
Скважинный беспроводной датчик для передачи данных через эксплуатационную насосно-компрессорную колонну в реальном времени
Номер патента: 9357
Опубликовано: 28.12.2007
Авторы: Тьюбел Пауло Серджио, Стюарт Джон Форман, Бергерон Кларк Джозеф
МПК: E21B 47/16, G01V 1/00
Метки: времени, данных, скважинный, беспроводной, датчик, колонну, эксплуатационную, передачи, реальном, насосно-компрессорную
Формула / Реферат:
1. Контрольно-измерительное устройство для передачи акустических сигналов через трубу к приемнику, при этом контрольно-измерительное устройство содержит генератор акустических волн; устройство сопряжения, механически соединенное с генератором акустических волн, причем устройство сопряжения выполнено с возможностью соединения и расцепления с трубой, так что задает акустический путь передачи между генератором акустических волн и трубой при...
Способ, система и устройство для обновления модели коллектора в реальном времени с использованием множественного фильтра калмана
Номер патента: 13657
Опубликовано: 30.06.2010
Авторы: Вэнь Зиань-Хуань, Чэнь Вэнь Х.
МПК: G06G 7/48
Метки: калмана, система, обновления, коллектора, времени, способ, множественного, устройство, модели, реальном, использованием, фильтра
Формула / Реферат:
1. Способ обновления совокупности моделей коллектора для отражения самых свежих измеренных промысловых данных и точного прогнозирования рабочих характеристик коллектора, при этом способ включает в себя этапы, на которых:(a) генерируют совокупность моделей коллектора так, что совокупность представляется на первом временном шаге посредством начального вектора состояния, который включает в себя начальные статические и динамические переменные...
Способ и устройство для построения изображений методом индукционного каротажа в буровом растворе на углеводородной основе

Номер патента: 11493
Опубликовано: 28.04.2009
Авторы: Эпов Михаил, Беспалов Александр Н., Табаровски Леонтий А.
МПК: G01V 3/38
Метки: растворе, методоm, углеводородной, построения, устройство, буровом, каротажа, способ, основе, изображений, индукционного
Формула / Реферат:
1. Способ определения удельной проводимости толщи пород, в котором осуществляют первые измерения с использованием по меньшей мере одной возбуждающей катушки или контура и по меньшей мере одной приемной катушки или контура, установленных на приборе в стволе пробуренной в толще пород скважины, так что их ось, по существу, перпендикулярна оси скважины, осуществляют вторые измерения для определения расстояний от прибора до стенки ствола скважины и...
Предыдущий патент: Нетоксичные для нервной ткани плазминоген-активирующие факторы для лечения инсульта
Следующий патент: Пневматический диссектор (воздухоструйный шабер)
Случайный патент: Бронеизделие баллистической защиты, включающее множество листов многослойных материалов