Устройство для размещения груза в заданном положении под водой с повышенной точностью и способ управления таким устройством
Формула / Реферат
1. Устройство (50) для размещения предмета (43) в заданном положении под водой, причем устройство снабжено маяком для передачи акустического излучения и множеством движителей (56(i), i=1, 2 ... I, при этом I является целым числом) для управления позиционированием упомянутого устройства относительно упомянутого заданного положения под водой, отличающееся тем, что устройство снабжено измерителем (258) скорости звука для непрерывного измерения скорости звука в текучей среде, окружающей упомянутое устройство, и передачи данных о скорости звука в реальном времени.
2. Устройство по п.1, отличающееся тем, что упомянутые движители включают первую группу движителей (56(1), 56(4)) для обеспечения функции управления крутящим моментом, и вторую группу движителей (56(2), 56(3)) для обеспечения, по меньшей мере, функции перемещения, причем каждый движитель из упомянутой второй группы движителей (56(2), 56(3)) предусмотрен с приводом (65(1), 65(2)) вращательного движения.
3. Устройство по любому из пп.1 или 2, отличающееся тем, что упомянутое устройство снабжено гирокомпасом с датчиками (256) движения для восприятия бортовой качки и килевой качки устройства при использовании.
4. Устройство по любому из предыдущих пунктов, отличающееся тем, что устройство снабжено блоком (260) гидролокатора для определения положения упомянутого устройства относительно по меньшей мере одного объекта, внешнего для упомянутого устройства.
5. Устройство по п.4, отличающееся тем, что устройство снабжено блоком (266) доплеровского лага для измерения силы течения упомянутой текучей среды.
6. Устройство по любому из предыдущих пунктов, отличающееся тем, что содержит динамометрические элементы (268) для измерения веса груза (43), зацепляемого устройством.
7. Устройство по любому из предыдущих пунктов, отличающееся тем, что устройство снабжено датчиком (266) температуры для измерения температуры упомянутой текучей среды и передачи данных о температуре в реальном времени.
8. Устройство по любому из предыдущих пунктов, отличающееся тем, что устройство снабжено солемером (266) для измерения солености упомянутой текучей среды и передачи данных о солености в реальном времени.
9. Устройство обработки данных, предназначенное для приведения в действие устройства (50) для размещения объекта (43) в заданном положении под водой, причем устройство снабжено маяком для передачи акустического излучения, множеством движителей (56(i), i=1, 2 ... I, при этом I является целым числом) для управления позиционированием упомянутого устройства относительно упомянутого заданного положения под водой, и измерителем (258) скорости звука для непрерывного измерения скорости звука в текучей среде, окружающей упомянутое устройство, и передачи данных о скорости звука в реальном времени, причем устройство обработки снабжено акустическим приемником (250) для приема упомянутого акустического излучения, при этом указанное устройство обработки данных предназначено для использования данных, получаемых из упомянутого акустического излучения при вычислении для определения положения устройства, а также для приема оперативных данных измерителя скорости звука от упомянутого измерителя (258) скорости звука для непрерывного определения профиля скорости звука в упомянутой текучей среде и вычисления из упомянутого профиля скорости звука искривления упомянутого акустического излучения, передаваемого устройством через текучую среду, и использовании его при вычислении для определения положения упомянутого устройства в реальном времени.
10. Устройство обработки данных по п.9, отличающееся тем, что упомянутые движители устройства 50 содержат первую группу движителей (56(1), 56(4)), предназначенную для создания функции управления крутящим моментом, и вторую группу движителей (56(2), 56(3)), предназначенную для создания, по меньшей мере, функции перемещения, причем каждый движитель из упомянутой второй группы движителей (56(2), 56(3)) снабжен приводом (65(1), 65(2)) вращательного движения и упомянутое устройство обработки данных предназначено для выполнения во время использования следующих функций:
управления приложением электропитания приведения в действие к упомянутым движителям упомянутой первой группы движителей (56(1), 56(4)) для поддержания упомянутого устройства в требуемой ориентации в первой плоскости, определяемой движущими силами, создаваемыми упомянутыми движителями (56(1), 56(4)) упомянутой первой группы; управления приложением электропитания приведения в действие к упомянутым движителям упомянутой второй группы движителей (56(2), 56(3)) и упомянутым приводам (65(1), 65(2)) вращательного движения для перемещения упомянутого устройства по среднему направлению и направлению, перпендикулярному упомянутому среднему направлению, в требуемое расположение, причем упомянутое среднее направление и упомянутое направление, параллельное упомянутому среднему направлению, находятся во второй плоскости, определяемой движущими силами, создаваемыми упомянутыми движителями (56(1), 56(4)) упомянутой второй группы.
11. Устройство обработки данных по п.10, отличающееся тем, что в упомянутом устройстве (50) упомянутая первая и вторая плоскости не являются совпадающими, причем устройство обработки данных предназначено для приема первых чувствительных сигналов от гирокомпаса с датчиками (256) движения на устройстве (50) в отношении бортовой качки и килевой качки устройства при использовании.
12. Устройство обработки данных по п.11, отличающееся тем, что первые чувствительные сигналы от гирокомпаса с датчиками (256) движения используются при вычислении для определения пространственного положения устройства (50).
13. Устройство обработки данных по любому из пп.9-12, отличающееся тем, что устройство (50) содержит датчик (266) температуры, в котором устройство обработки данных предназначено для приема данных о температуре от упомянутого датчика температуры, чтобы обновлять профиль температуры в упомянутой текучей среде и способствовать коррекции при определении положения упомянутого устройства (50) в реальном времени.
14. Устройство обработки данных по любому из пп.9-13, отличающееся тем, что устройство (50) содержит солемер (266), в котором устройство обработки данных предназначено для приема данных о солености от упомянутого солемера для обновления профиля солености в упомянутой текучей среде и коррекции определения положения упомянутого устройства (50) в реальном времени.
15. Судно, снабженное устройством обработки данных по любому из пп.9-14.
16. Судно по п.15, отличающееся тем, что судно снабжено гидроакустической антенной решеткой (250) , прикрепленной к корпусу судна, и поверхностным блоком (234) с ультракороткой базовой линией на борту судна, предназначенным для связи с упомянутой гидроакустической антенной решеткой (250), причем гидроакустическая антенная решетка (250) предназначена для приема акустических сигналов, по меньшей мере, от упомянутого устройства (50) и передачи выходных данных гидроакустической антенной решетки на упомянутое устройство обработки данных, которое предназначено для выполнения в реальном времени вычисления положения, по меньшей мере, упомянутого устройства (50) относительно упомянутой гидроакустической антенной решетки (250), основываясь на упомянутых выходных данных гидроакустической антенной решетки.
17. Судно по п.16, отличающееся тем, что гидроакустическая антенная решетка (250) содержит измеритель (248) скорости звука для измерения скорости звука в слоях текучей среды как раз под судном и передачи выходных данных измерителя скорости звука на упомянутое устройство обработки данных, причем упомянутое устройство обработки данных предназначено для корректировки упомянутого вычисления упомянутого положения упомянутого устройства (50), основанного на упомянутых выходных данных измерителя скорости звука в реальном времени.
18. Судно по п.16 или 17, отличающееся тем, что гидроакустическая антенная решетка (250) содержит гирокомпас (252) гидроакустической антенной решетки для измерения вертикальной качки, бортовой качки и килевой качки гидроакустической антенной решетки (250) и передрчш выходных данных гирокомпаса гидроакустической антенной решетки на упомянутое устройство обработки данных, причем устройство обработки данных предназначено для корректировки упомянутого вычисления упомянутого положения упомянутого устройства (50), основанного на упомянутых выходных данных гирокомпаса гидроакустической антенной решетки в реальном времени.
19. Судно по любому из пп.15-18, отличающееся тем, что судно содержит гирокомпас (206) судна для измерения вертикальной качки, бортовой качки и килевой качки судна и передачи выходных данных гирокомпаса судна на упомянутое устройство обработки данных, причем устройство обработки данных предназначено для коррекции упомянутого вычисления упомянутого положения упомянутого устройства (50), основанного на упомянутых выходных данных гирокомпаса судна в реальном времени.
20. Система, содержащая судно по любому из пп.15-19 и устройство по любому из пп.1-8, причем устройство и устройство обработки данных предназначены для связи друг с другом.
21. Система по п.20, отличающаяся тем, что устройство и устройство обработки данных соединены посредством волоконно-оптических (де)мультиплексоров (244, 246), соединенных между собой оптоволокном.
22. Способ приведения в действие устройства (50) для размещения объекта (43) в заданном положении под водой, причем устройство снабжено маяком для передачи акустического излучения, множеством движителей (56(i), i=1, 2 ... I, причем I является целым числом) для управления позиционированием упомянутого устройства относительно упомянутого заданного положения под водой и измерителем (258) скорости звука для непрерывного измерения скорости звука в текучей среде, окружающей упомянутое устройство, и передачи данных о скорости звука в реальном времени, причем способ включает следующие этапы:
прием упомянутого акустического излучения,
использование данных, получаемых из упомянутого акустического излучения, при вычислении для определения положения устройства,
прием данных измерителя скорости звука от упомянутого измерителя (258) скорости звука и непрерывное определение профиля скорости звука в упомянутой текучей среде и
вычисление из упомянутого профиля скорости звука искривления упомянутого акустического излучения, передаваемого устройством через текучую среду, и использование его при вычислении для определения положения упомянутого устройства.
23. Продукт компьютерной программы, содержащий данные и команды, которые после загрузки обрабатывающим оборудованием предоставляет упомянутому оборудованию возможность выполнять способ по п.22.
24. Носитель данных, снабженный продуктом компьютерной программы по п.23.

Текст
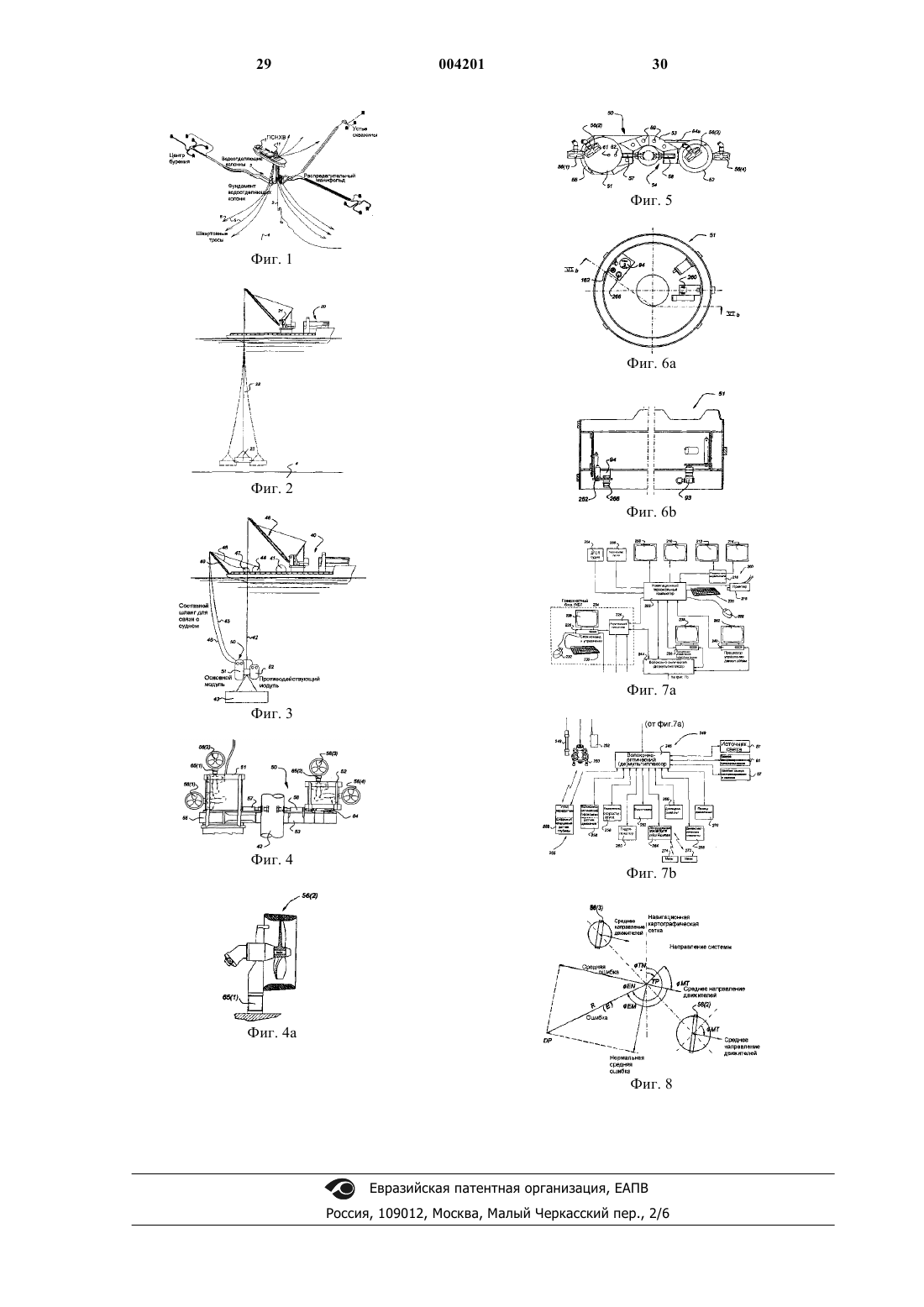
1 Настоящее изобретение относится к устройству для размещения предмета в заданном положении под водой, причем устройство снабжено маяком для передачи акустического излучения и множеством движителей для управления позиционированием устройства относительно заданного положения под водой. Такое устройство известно из WO 99/61307. Устройство из известного уровня техники используется для размещения и/или поднятия грузов до 1000 т или более на морском дне на больших глубинах, например, до 3000 м или более. При размещении устройство управляется управляющим оборудованием на борту судна,плавающего на поверхности моря. Управляющему оборудованию необходимо иметь насколько возможно более точные сведения о точном расположении устройства. С этой целью маяк на борту устройства передает акустическое излучение через морскую воду на судно. Соответствующий акустический приемник принимает это акустическое излучение и преобразует его в электрические сигналы, используемые для вычисления положения устройства относительно судна. Однако, обнаружено, что с увеличением глубины расположения устройства в морской воде уменьшается точность определения расположения вследствие искривления акустического излучения в морской воде. Целью изобретения является повышение точности определения расположения такого устройства при использовании в морской воде или любой другой текучей среде. Кроме того такое определение расположения должно быть оперативным (в реальном времени). Для осуществления этой цели устройство,как определено выше, отличается тем, что оно снабжено измерителем скорости звука для измерения скорости звука в текучей среде, окружающей упомянутое устройство. Таким образом, скорость звука в некотором расположении в текучей среде может непрерывно измеряться и использоваться для обновления профиля скорости звука т.е. данных, касающихся скорости звука как функции глубины в текучей среде. Из указанных данных можно оперативно (в реальном времени) определять локальное искривление акустического излучения. До настоящего времени такое оперативное определение в реальном времени не было возможным. Оно позволяет производить корректировку локальных измерений в реальном времени. В предпочтительном варианте выполнения движители включают первую группу движителей, предназначенных для выполнения функции управления крутящим моментом, и вторую группу движителей, предназначенных, по меньшей мере, для выполнения функции поступательного перемещения, причем каждый дви 004201 2 житель второй группы движителей снабжен приводом вращательного движения. Указанный вариант реализации имеет преимущества. Необходимы только два движителя для предотвращения любого нежелательного вращения устройства, прикрепленного к грузу,при размещении, тем самым исключая все проблемы, связанные со скручиванием и вращением подъемных тросов, несущих груз, как уже описано в WO 99/61307. Кроме того, необходимы только два вращательных движителя для управления позиционированием устройства с прикрепленным к нему грузом в требуемые горизонтальные координаты. Таким образом, до опускания груза с устройством устройство может перемещать груз в положение с требуемыми горизонтальными координатами и, когда эти координаты будут достигнуты, подъемный трос(подъемные тросы) может опускать груз в его требуемое расположение на морском дне, в то время как движители поддерживают груз в положении с требуемыми координатами и предотвращают любое нежелательное вращение груза. Только тогда, когда будет достигнуто требуемое заданное положение на морском дне, возможное вращение груза для достижения требуемой ориентации должно быть выполнено посредством движителей, предназначенных для управления крутящим моментом. Следует отметить, что вращательные движители на подводном устройстве для размещения грузов в требуемом положении известны изUS-A-5 898 746. Устройство, предпочтительно, снабжено динамометрическими элементами для измерения веса груза, прикрепленного к устройству. Когда посредством этого груз опускается на морское дно, вес внезапно уменьшается. Таким образом, сигнал, указывающий на то, что вес груза внезапно уменьшился, может быть использован для определения, когда устройство может быть отсоединено от груза. Изобретение также относится к обрабатывающему оборудованию, предназначенному для приведения в действие устройства для размещения предмета в заданном положении под водой,причем устройство снабжено маяком для передачи акустического излучения, множеством движителей для управления позиционированием устройства относительно заданного положения под водой и измерителем скорости звука для измерения скорости звука в текучей среде,окружающей устройство, при этом обрабатывающее оборудование снабжено акустическим приемником для приема акустического излучения, обрабатывающее оборудование предназначено для использования данных, получаемых из акустического излучения, при вычислении для определения положения устройства, отличается тем, что обрабатывающее оборудование предназначено для приема оперативных данных измерителя скорости звука от измерителя скорости 3 звука для определения профиля скорости звука в текучей среде и вычисления из профиля скорости звука искривления акустического излучения, передаваемого устройством через текучую среду, и использования его при вычислении для определения положения устройства в реальном времени. Такое обрабатывающее оборудование может управлять приведением упомянутого устройства в требуемое расположение с требуемой ориентацией с очень высокой точностью, даже на большой глубине под водой. В то время как устройство с его грузом опускается, обрабатывающее оборудование постоянно принимает данные о скорости звука и определяет профиль скорости звука, содержащий данные о скорости звука от поверхности воды до глубины нахождения устройства. Обрабатывающее оборудование использует эти данные для определения искривления акустического излучения как функции глубины в воде и, таким образом, корректировки любого вычисления положения устройства. Такое обрабатывающее оборудование может находиться на борту судна, плавающего на поверхности воды. Однако понятно, что часть функциональных возможностей по определению профиля скорости звука и вычислению искривления акустического излучения может выполняться одним или несколькими процессорами, расположенными в другом месте, даже на борту самого устройства. Предпочтительно предусмотрен дополнительный измеритель скорости звука как раз под поверхностью воды для получения фактических данных, касающихся любого искривления излучения в поверхностных слоях воды и, таким образом, дополнительной корректировки любого вычисления положения устройства. Прием акустического излучения, передаваемого устройством, предпочтительно выполняется гидроакустической антенной решеткой,прикрепленной к корпусу судна. В предпочтительном варианте выполнения судно, гидроакустическая антенная решетка и устройство - все снабжены отдельными гирокомпасами, измеряющими соответствующие вертикальные качки, бортовые качки и килевые качки. Выходные данные от указанных гирокомпасов используются для дальнейшего повышения точности определения положения устройства. Изобретение также относится к системе,содержащей вместе такое судно и устройство. Изобретение также относится к способу приведения в действие устройства для размещения предмета в заданном положении под водой,причем устройство снабжено маяком для передачи акустического излучения, множеством движителей для управления позиционированием устройства относительно заданного положения под водой и измерителем скорости звука 4 для измерения скорости звука в текучей среде,окружающей устройство, причем способ включает следующие этапы: прием акустического излучения,использование данных, получаемых из акустического излучения, при вычислении для определения положения устройства,отличающийся тем, что включает следующие этапы: прием данных измерителя скорости звука от измерителя скорости звука и определение профиля скорости звука в текучей среде, и вычисление из профиля скорости звука искривления акустического излучения, передаваемого устройством через текучую среду, и использование его при вычислении для определения положения устройства. Указанный способ может полностью управляться соответствующей компьютерной программой после загрузки обрабатывающим оборудованием. Поэтому изобретение также относится к продукту компьютерной программы, включающему данные и команды, которые после загрузки обрабатывающим оборудованием предоставляют упомянутому оборудованию возможность выполнять способ, как определено выше. Также заявляется носитель данных, предусмотренный с указанным продуктом компьютерной программы. Ниже подробно описывается изобретение с ссылкой на чертежи. Чертежи предназначены только для иллюстрации изобретения, а не для ограничения его объема, который определяется только прилагаемой формулой изобретения. На фиг. 1 представлен схематический общий вид плавучей системы нефтедобычи, хранения и выгрузки (ПСНХВ), предназначенной для морской нефтехимической добычи. На фиг. 2 - крановое судно в соответствии с известным уровнем техники и груз, прикрепленный к крановому блоку относительно длинными проволочными канатами, посредством чего можно видеть, что на большой глубине практически невозможно управлять грузом. На фиг. 3 - крановое судно и подводная система для размещения груза на морском дне и/или подъема с него в соответствии с известным уровнем техники. На фиг. 4 - подробный общий вид возможного варианта выполнения подводной системы. На фиг. 4 а - подробный общий вид одного из вращательных движителей. На фиг. 5 - вид сверху подводной системы. На фиг. 6 а и 6b схематически изображена нижняя сторона основного модуля с некоторыми детекторами. На фиг. 7 а - схематическая блок-схема электронного оборудования на борту судна. На фиг. 7b - схематическая блок-схема электронного оборудования, относящегося к 5 гидроакустической антенной решетке и к подводной системе. На фиг. 8 - схема определения трех различных систем координат, используемых во время осуществления процесса приведения подводной системы в ее заданное положение. Описание предпочтительного варианта выполнения Как показано на фиг. 1, на чертеже представлена ПСНХВ 1 с вертлюжным эксплуатационным комплектом 11, от которого отходят водоотделяющие колонны 2, причем упомянутые водоотделяющие колонны соединены с их фундаментами 3 водоотделяющих колонн на морском дне 4. Во время эксплуатационного срока службы главным для ПСНХВ 1 является нахождение в пределах допустимого динамического диапазона перемещения и, вследствие этого,ПСНХВ 1 швартуется к морскому дну 4 при помощи швартовных тросов 5, которые удерживаются якорями 6, или, альтернативно, сваями. Эксплуатация месторождения нефти или газа при помощи нефтедобычного судна 1 требует, чтобы несколько относительно тяжелых предметов были расположены на морском дне 4 с высокой точностью. Для обеспечения соответствующей и надежной постановки на якорь при помощи швартовных тросов 5 необходимо, чтобы указанные тросы для швартовки 5 имели приблизительно одинаковую длину. На практике для этого применения могут быть использованы якоря с массой 50 т и более, которые размещаются на морском дне 4 с точностью до нескольких метров. Кроме того, не только сам якорь 6 очень тяжелый, но трос для швартовки, прикрепленный к якорю 6, имеет массу, которая в несколько раз превышает массу самого якоря 6. Для других объектов, таких как опорные плиты для бурения, гравитационные фундаменты водоотделяющих колонн, эксплуатационные манифольды и т.д., также применимо,что эти предметы должны быть установлены на морском дне 4 с относительно высокой точностью. Объекты, изображенные на фиг. 1, которые необходимы для эксплуатации месторождения нефти и газа в море и которые должны быть установлены на морском дне, не только очень тяжелы, но также очень дорогие. На фиг. 2 изображено судно 20 в соответствии с известным уровнем техники, имеющее подъемное средство на нем, такое как кран 21. Кран 21 снабжен подъемным тросом 22, при помощи которого предмет или груз 4 может быть установлен на морском дне 5. Для расположения груза 23 необходимо перемещать опору на поверхности вместе с краном 21. В результате, в какой-то заданный момент времени будет преодолена инерция груза 23, но вследствие ускорения груза 23 будет иметь место неуправляемая ситуация, в результате чего 6 произойдет перелет заданной области. Из-за того факта, что подъемный трос 22 и груз 4 подвержены влияниям, таким как морское течение,груз 23 не будет перемещаться непосредственно вниз, когда опускается подъемный трос 22. Также вертикальная качка, бортовая качка и килевая качка судна 20 будут иметь отрицательное влияние на точность, которая может быть достигнута. На фиг. 3 изображено крановое судно 40,снабженное подводным устройством или системой 50 для размещения груза 43 на морском дне 4. Судно 40 содержит первое подъемное устройство, например лебедку 41, предусмотренную с первым подъемным тросом 42. Посредством этого подъемного троса 42 груз 43, например опорная плита для бурения, может быть размещен и установлен на дне моря. Как упомянуто выше, эксплуатация нефтяных и газовых месторождений с использованием плавучей нефтедобычной платформы требует, чтобы несколько тяжелых предметов должны быть установлены на морском дне 4, кроме того, эти предметы должны быть установлены на морском дне 4 с очень высокой точностью. Вследствие того факта, что в настоящее время эксплуатация должна производиться на все возрастающих глубинах до 3000 м и более, становится все труднее достигать требуемую точность. Например, одной из проблем, которую необходимо решить, является возможное вращение груза 43, переносимого подъемным тросом 42. Для управления положением груза 43 при его размещении и для того чтобы можно было располагать груз 43 на морском дне 4 с требуемой точностью, к подъемному тросу 42 было прикреплено устройство или система 50. Предпочтительный вариант выполнения системы 50 описывается с ссылкой на фиг. 4, 5, 6 а и 6b. Устройство 50 может зацеплять конец подъемного троса 42. Альтернативно, система 50 может непосредственно зацеплять сам груз 43. Система 50 содержит первый или основной модуль 51, предусмотренный с приводным средством, таким как движители 56(i), i=1, 2, 3I, причем I является целым числом (фиг. 4 и 5). Система дополнительно содержит второй или противодействующий модуль 52. Этот противодействующий модуль 52 также предусмотрен с движителями 56(i). При использовании движители основного модуля 51 и противодействующего модуля 52 располагаются на противоположных сторонах подъемного троса 42. Устройство 50 соединено с судном 40 при помощи второго подъемного троса 45, который может быть приведен в действие, используя второе подъемное устройство, например вторую лебедку 44. Второй подъемный трос 45, например, устанавливается за бортом при помощи Аобразной рамы 49. Вторая лебедка 44 и второй подъемный трос 45 обычно легче, чем первое подъемное устройство 48 и основной подъем 7 ный трос 42 соответственно. Устройство 50 дополнительно соединено с судном 40 при помощи составного шланга 46 для связи с судном. Этот составной шланг 46 для связи с судном может быть прикреплен к подъемному тросу 45 или может опускаться отдельно посредством третьей лебедки 47. Электропроводка для подведения электропитания к устройству 50, а также электропроводка или оптоволокно размещены, например, в составном шланге для связи с судном. В устройстве 50 традиционно предусмотрено устройство для преобразования электроэнергии в гидроэнергию. Гидроэнергия, поэтому, используется для управления движителями 56(i) и вспомогательной инструментальной оснасткой. Так как в последнее время работы осуществляются на все увеличивающихся глубинах,закручивание и вращение грузов 43 и длинных подъемных тросов 42 становится еще большей проблемой. Так как тяжелые грузы 43 прикрепляются к нижней части подъемного троса 42,такое закручивание и вращение может привести к относительно большому износу подъемных тросов, так что может произойти серьезное повреждение подъемных тросов. Этот износ может быть настолько серьезным, что подъемный трос 42 разрывается и груз 43 теряется. Другая проблема заключается в том, что из-за огромного закручивания тросов тросы на судне могут соскочить со шкивов. Вследствие того факта, что движители 56(i) основного модуля 51 и противодействующего модуля 52 соответственно расположены на противоположных сторонах подъемного троса 42, противодействующий крутящий момент может воздействовать на подъемный трос 42 в обоих направлениях. Таким образом посредством системы образуется противозакруточное устройство. Для улучшения свойств указанного противозакруточного устройства расстояние между основным модулем 51 и противодействующим модулем 52, предпочтительно, может изменяться. На фиг. 4 показан подробный общий вид возможного варианта выполнения устройства 50 для размещения груза 43 на морском дне 4. На фиг. 5 представлено устройство согласно вышеупомянутой фиг. 4. Устройство 50 содержит основной модуль 51, противодействующий модуль 52 и кронштейн 53. Кронштейн 53 может быть отсоединен от основного модуля 51. Это означает, что основной модуль 51 также может быть использован отдельно как модульная система. Кронштейн 53 предусмотрен с углублением 54. На противоположных сторонах этого углубления 54 предусмотрены два рычага 57, 58, по меньшей мере, один из которых может перемещаться относительно другого. Между торцевыми поверхностями указанных рычагов 57, 58 может быть зажат предмет, такой как крановый блок 8 груза 43. Для улучшения контакта между рычагами 57, 58 и объектом соответствующие торцы рычагов снабжены зажимными колодками, облицованными фрикционными элементами из высокофрикционного материала, такого как специально предназначенная резина. При применении движители 56(i) могут быть использованы для позиционирования устройства 50 относительно заданной области на морском дне 4. Движители 56(i) могут быть приведены в действие из первого положения, в основном, внутри устройства 50 в положение,при котором движители выступают из устройства 50. Два верхних движителя 56(2), 56(3) могут вращаться относительно подводного устройства 50. Они установлены, например, на соответствующих приводах 65(1), 65(2) вращательного движения, назначение которых объясняется ниже. Движитель 56(2) показан в увеличенном масштабе на фиг. 4 а. На фиг. 5 показано, что имеется два положения 61, 62 на верхней части основного модуля 51 для соединения основного модуля со вторым подъемным тросом 45 и/или с составным шлангом 46 для связи с судном. Когда основной модуль 51 используется отдельно, положение 61 может быть использовано. Основной модуль 61 будет сбалансирован, когда размещается модуль 61, как на воздухе, так и под водой. Когда используется устройство 50, соединение между судном 40 и устройством 50 закрепляется в положении 62, для сохранения системы в равновесии, как на воздухе, так и под водой. Для улучшения равновесия устройства к устройству 50 может быть прикреплен вспомогательный противовес 55. При использовании устройство 50 не обладает никакой плавучестью. Для улучшения подвижности устройства под водой кронштейн 53 снабжен отверстиями 59, чтобы исключить конструктивное повреждение вследствие увеличивающегося давления при опускании и обеспечить быстрый слив воды во время фазы подъема. Как упомянуто выше, полезно, когда противодействующий модуль 52 может перемещаться относительно основного модуля 51. Это может быть выполнено с использованием рычагов 64 а. Модуль 51 содержит внешнюю раму и внутреннюю раму (обе не показаны). Внутренняя рама, предпочтительно имеет цилиндрическую форму. Посредством соединения внешней рамы с внутренней рамой можно получить очень прочную конструкцию. Прочность конструкции необходима для избежания появления преждевременной усталости в системе. Модуль 51, например, частично выполнен из высокопрочной стали и, таким образом,предназначен для использования в качестве выполненной за одно целое части либо первого 42,либо второго подъемного троса 45. Это означа 9 ет, что верхняя сторона модуля 51 соединяется с первой частью подъемного троса 45, и что нижняя сторона модуля 51 соединяется со второй частью подъемного троса 45, или нижняя часть модуля 51 прикрепляется непосредственно к грузу. Таким образом нагрузка на подъемный трос передается через модуль 51. Как упомянуто выше, модуль 51 снабжен приводом 270 движителя для преобразования электроэнергии, подаваемой через составной шланг 46 для связи с судном, в гидроэнергию. Этот привод 270 движителя может содержать двигатели, насос, трубопровод и гидравлический бак. Такое преобразующее средство известно специалистам в этой области техники и не требует подробного здесь описания. Для передачи соответствующих данных относительно его положения, как абсолютного, так и относительного относительно других предметов, на систему управления и/или оператору на борту судна 40, модуль 51 дополнительно содержит датчик и блок управления, которые подробно будут описаны ниже. Модуль 51 оснащен распределительной коробкой датчиков. Кроме того,модуль 51 содержит источники 87 света, гирокомпас 256, включающий датчики вертикальной качки, бортовой качки и килевой качки, цветную камеру 97 панорамирования и наклона, передатчик 255 с ультракороткой базовой линией(УКБЛ), включающий цифровой кварцевый датчик 253 глубины, измеритель 258 скорости звука и гидроакустическая станция дна 264(mini Rovnav). На нижней стороне модуля 51 установлены на нескольких платформах источники 94 света, камера 93 панорамирования на суперкремниконе, высотомер 262, блок 266 доплеровского лага и гидролокатор 260 кругового обзора с двойной головкой. При использовании они установлены там, чтобы иметь только прозрачную морскую воду под ними. Они схематически показаны на фиг. 6 а и 6b. Необходимо понять, что они могут быть расположены в другом месте, например на нижней стороне модуля 52. Кроме того, динамометрические элементы 268 являются частью системы 51. Все эти компоненты схематически указаны на фиг. 7b. Как упомянуто выше, использование гидроакустического оборудования (гидролокатор кругового обзора с двойной головкой) 260 с высоким разрешением вместе с лагом расстояния,измеряемым блоком 266 доплеровского лага,важно для достижения требуемой точности, если груз достиг предназначенной для него глубины. Гидроакустическое оборудование 260 используется для определения положения относительно по меньшей мере одного предмета,расположенного на морском дне. При использовании лага расстояния тогда можно отделить деятельность по позиционированию от опоры на поверхности, а также от любых других гидроакустических устройств передатчика, таких как антенные решетки с длинной базовой линией(ДБЛ) (или других, например УКБЛ), в то время как точность порядка сантиметров достигается в пределах большого радиуса. На фиг. 7 а изображено электронное оборудование 200, установленное на судне 40, тогда как на фиг. 7b изображена размещаемая гидроакустическая антенная решетка 250 с измерителем 248 скорости и гирокомпасом 252. На фиг. 7b также изображено подводное электронное оборудование 249,установленное на подводном устройстве 50. Оборудование, изображенное на фиг. 7 а,содержит четыре процессора: навигационный процессор 202, акустический процессор 224,процессор 236 управления гидролокатором и процессор 240 управления движителями. Навигационный процессор 202 является интерфейсом для других трех процессоров 224, 236, 240 для связи между собой и дополняемости. Навигационный процессор 202 также является интерфейсом для оборудования 204 позиционирования на поверхности дифференциальной глобальной системы позиционирования(де)мультиплексора. Если необходимо, разделитель 216 видеосигнала может быть предусмотрен для передачи одного выходного сигнала стандарта SVGA навигационного процессора 202 на два или более блока отображения. На фиг. 7 а блоки 212, 214 отображения подсоединены к навигационному процессору 202 через разделитель 216 видеосигнала. Блок 244 волоконно-оптического (де)мультиплексора также подсоединен к акустическому процессору 224, процессору 236 управления гидролокатором и процессору 240 управления движителями. Акустический процессор 224 подсоединен к блоку 226 команд и управления, который подсоединен к клавиатуре 230, манипулятору 232 типа мышь и блоку 228 отображения, при этом все вместе образуют поверхностный блок 234 с УКБЛ. Акустический процессор 224 подсоединен к размещаемой гидроакустической антенной решетке 250 с блоком 252 датчика движения и измерителем 248 скорости. При использовании гидроакустическая антенна решетка 250, предпочтительно, устанавливается на расстоянии 2,5 метра ниже киля судна 40. Блок 244 волоконно-оптического (де)мультиплексора соединяется с дополнительным волоконно-оптическим (де)мультиплексором 246, установленным в подводном устройстве 50. Оптоволокно,соединяющее между собой оба волоконнооптических (де)мультиплексора 244, 246, предпочтительно, размещено в составном шланге 46 для связи с судном (фиг. 3). Процессор 236 управления гидролокатором соединен с блоком 238 отображения. Про 11 цессор 240 управления движителями соединен с блоком 242 отображения. Подводное оборудование 249 изображено на фиг. 7b в виде блок-схемы. Передатчик 255 с УКБЛ с цифровым кварцевым датчиком 253 глубины, гирокомпас с датчиками 256 движения, (съемный) измеритель 258 скорости звука,гидролокатор 260 кругового обзора с двойной головкой, высотомер 262, гидроакустическая станция 264 дна (mini Rovnav), блок 266 доплеровского лага, динамометрические элементы 268 и блок управления 270 приводом движителей - все подсоединены к волоконнооптическому (де)мультиплексору 246. Кроме того, на фиг. 7b изображены два маяка 272, 274, которые могут быть установлены на морском дне или на размещаемом грузе(или на других конструкциях, которые уже на морском дне). Эти маяки 272, 274 могут, например, опрашиваться при помощи гидроакустической станции 264 дна (mini Rovnav) (или эквивалентного оборудования) для передачи акустического сигнала обратно на устройство 50, которые могут быть использованы самим устройством 50 для определения и измерения расстояний и ориентации относительно этих маяков. Такая акустическая телеметрическая линия приводит к очень высокой точности в отношении определения положения. Количество таких маяков не ограничивается двумя, изображенными на фиг. 7b. Функциональные возможности Функции компонентов, изображенных на фиг. 7 а и 7b, следующие. Навигационный процессор 202 собирает данные позиционирующего оборудования на поверхности (приемники ДГСП, коррекции ДГСП, гирокомпас судна и датчики 204 и 206 движения судна) для вычисления и отображения пространственного положения судна и его фиксированных смещений. Через волоконно-оптические (де)мультиплексоры 244 и 246 навигационный процессор 202 посылает различные установочные параметры на навигационные приборы устройства 50, т.е. блок 266 доплеровского лага, высотомер 262 и гирокомпас и датчики 256 движения. После установки он принимает данные от этих приборов, а также через акустический процессор 224 данные о дальности/пеленге и глубине устройства 50 для вычисления и отображения пространственных положений и абсолютных координат устройства 50. Был разработан интегрированный программный комплекс для навигационного процессора 202, включающий программное обеспечение динамического контроллера позиционирования, способного работать в ручном режиме или в автоматическом режиме для определения предполагаемого курса устройства 50 и выбора между многими маршрутными точками и выполнения предполагаемого позиционирования. 12 Кроме того, оператор на борту судна может ввести смещения для выбранных маршрутных точек, причем смещения вводятся с координатамиXY относительно курса устройства 50. Существует другая возможность выбора нескольких других типов подводных позиционирующих приборов посредством расположения специально разработанных окон на экранах (электронных страниц) блоков 208-214 отображения для стабилизации и фильтрации положения. Для того чтобы гарантировать, что оператор имеет максимально возможное количество инструментов для получения оптимального результата,имеется другая часть в программном обеспечении, изображающая различное состояние подводных приборов при использовании для оперативного вычисления (в реальном времени) положения устройства 50. Гирокомпас 256, включающий датчики 88 вертикальной качки, бортовой качки и килевой качки, установленный на борту системы 50,обеспечивает данные в отношении точных пространственных положений как системы 50, так и груза 43, подлежащего размещению на морском дне. На поверхности моря на станции управления операторы могут оперативно (в реальном времени) проверить эти пространственные положения во время спуска, а также если груз 43 лежит на морском дне, для окончательной проверки. Гирокомпас 206 судна, а также гирокомпас с датчиками 252 движения, установленный на гидроакустической антенной решетке 250, который может быть использован для этих же функций, передает курс судна на навигационный процессор 202. Навигационный процессор 202 использует этот курс судна для вычисления различных смещений. Блоки 208, 210, 212 и 214 отображения предназначены соответственно для отображения навигационных установочных параметров, вида морского дна, вида поверхности на станции управления для операторов и еще один - на ходовом мостике судна для операторов морского отдела. Блок 226 команд и управления УКБЛ состоит из персонального компьютера, обеспечивающего управление и конфигурирование системы и отображающего человеко-машинный интерфейс для управления оператором. Акустический процессор 224, предпочтительно, состоит из одной стойки модульной системы на евроконструктивах, которая выполняет процесс корреляции принимаемых сигналов,коррекции для измерения глубин и скорости движения и пространственного положения судна. Кроме того, он вычисляет координаты любого используемого маяка. Акустический процессор 224 связан с навигационным процессором 202 через сеть Eternet. Гидроакустическая антенная решетка 250 включает устройство для передачи и приема. 13 Гидроакустическая антенная решетка 250 может быть использована в качестве преобразователя для акустической связи с одним или несколькими маяками. Такой режим преобразования полезен тогда, когда составной шланг 46 для связи с судном будет поврежден и будет неспособен передавать сигналы опроса на устройство 50. Тогда акустические сигналы опроса могут передаваться вниз преобразователем непосредственно через морскую воду. Во всех других случаях гидроакустическая антенная решетка 250 используется в режиме приема. Прием выполняется двумя ортогональными приемными базами,которые измеряют расстояния и пеленг маяков относительно гидроакустической антенной решетки 250. Каждая приемная база включает два преобразователя. Каждый принимаемый сигнал усиливается, фильтруется и передается на акустический процессор 224 для цифровой обработки сигналов. Измеритель 248 скорости звука, установленный на гидроакустической антенной решетке 250, обновляет в реальном времени критический и неустановившийся профиль скорости звука, расположенный как раз под судном 40. Это имеет большую важность, так как завихрения морской воды, по-видимому, очень сильные в этих слоях как раз под судном 40. Гирокомпас 252, предпочтительно используется в качестве блока датчика движения, передающего пространственное положение гидроакустической антенной решетки на акустический процессор 224 для детектирования данных в отношении положения устройства 50 под водой. В предпочтительном варианте выполнения маяк 254 работает в режиме передатчика и имеет следующие характеристики: сигнал опроса запуска, формируемый акустическим процессором 224, не акустический, а электрический и передается на маяк 254 через кабельную шину между судном 40 и устройством 50; частоты опроса дистанционно управляются оператором через человеко-машинный интерфейс. Как упомянуто выше, маяк 254 также может быть использован в режиме передатчика. Тогда маяк 254 запускается акустическим сигналом с поверхности, передаваемым гидроакустической антенной решеткой 250, и затем подает акустический ответный сигнал на гидроакустическую антенную решетку 250 посредством кодированного акустического сигнала. Цифровой кварцевый датчик 253 глубины,включенный в маяк 254, позволяет передавать очень точные данные о глубине устройства 50 на акустический процессор 224. Акустический процессор 224 использует эти данные для улучшения вычисления подводного позиционирования устройства 50 и его груза 43. 14 Измеритель 258 скорости звука, установленный на подводном устройстве 50, передает данные в отношении скорости звука в морской воде на глубине подводного устройства 50 на акустический процессор 224 во время спуска и подъема. Данные о скорости звука используются для обновления вычисленных профилей скорости звука в морской воде как функции глубины в реальном времени и вычисления искривления акустического излучения из этих профилей как функции глубины в морской воде и, таким образом, для корректировки вычислений подводного положения устройства 50. Гидролокатор 260 кругового обзора с двойной головкой используется для измерения дальности и пеленга устройства 50 относительно любой искусственной или природной цели на морском дне и вывода соответствующих данных в виде цифровых значений на навигационный процессор 202. Положение таких искусственных или природных целей может быть либо предварительно определено, либо навигационная система может определить координаты каждого выбранного предмета. После определения координат предметов они могут быть использованы в качестве навигационных ориентиров в системе локальных координат. Это приводит к точности 0,1 м в относительных координатах. Высотомер 262, установленный на устройстве 50, измеряет вертикальное расстояние от подводного устройства 50 до морского дна и передает выходные данные измерения на акустический процессор 224. Блок 266 доплеровского лага обеспечивает данные в отношении величины и направления течения морской воды на глубине подводного устройства 50. Эти данные используются двояким образом. Во-первых, данные, принимаемые от блока 266 доплеровского лага и гирокомпаса с датчиком 256 движения, используются акустическим процессором 224 для оперативного сглаживания(в реальном времени) случайного шума, связанного с использованием УКБЛ. Для получения такого оперативного сглаживания случайного шума используется фильтр, например фильтр Калмана, фильтр Саломонсена, минимальный вариант фильтра Саломонсена или любой другой соответствующий фильтр в блоке 224 основного процессора. Такие фильтры известны специалистам в этой области техники. Краткую сводку можно найти в приложении А. Во-вторых, выходные данные блока 266 доплеровского лага в отношении силы течения,направления течения, вместе с данными, касающимися настоящего и предполагаемого курса подводного устройства 50, передаются на процессор 240 управления движителями через навигационный процессор 202. Основываясь на предполагаемом направлении, автоматически управляется управление 270 приводом движи 15 телей. Также может быть предусмотрено ручное управление. В преимущественном варианте выполнения блок 266 доплеровского лага (или любой другой соответствующий датчик) используется для измерения температуры и/или солености морской воды, окружающей устройство 50. Данные в отношении локальной температуры и/или солености передаются на навигационный процессор 202, который вычисляет и обновляет профили температуры и/или солености как функции глубины морской воды. Эти данные также используются для определения искривления акустического излучения в морской воде и,таким образом, корректировки вычислений положения устройства 50. Гидроакустическая станция 264 дна (miniRovnav) является дополнительной и может быть использована для обеспечения относительного положения устройства 50 по отношению к локальным маякам на морском дне, как описано выше. Например, антенная решетка с ДБЛ может быть уже установлена на морском дне и используется для этой цели. Динамометрические элементы 268 используются для измерения веса груза 43, зацепляемого подводным устройством 50. Если этот вес уменьшается, то это является указанием на то,что груз уже установлен на морском дне (или в другом заданном положении), и что устройство 50 может быть отсоединено от груза 43. Выходные данные от динамометрических элементов передаются на навигационный процессор 202 через (де)мультиплексоры 244, 246. Блок управления 270 приводом движителей используется для привода движителей 56(i) для приведения подводного устройства 50 в требуемое положение, как подробно описано ниже. На фиг. 7 а изображены четыре различных процессора 202, 224, 236 и 240 для выполнения функциональных возможностей системы в соответствии с изобретением. Однако необходимо понять, что функциональные возможности системы, альтернативно, могут быть выполнены любым другим соответствующим количеством взаимодействующих процессоров, включая одну основную ЭВМ, либо с параллельной организацией, либо с организацией ведущийведомый. Могут быть использованы даже удаленно расположенные процессоры. Для выполнения некоторых функций на борту подводного устройства 50 может быть предусмотрен процессор. Процессоры могут иметь непоказанные компоненты памяти, включая жесткие диски,постоянные запоминающие устройства (ПЗУ),электрически стираемые программируемые ПЗУ, оперативные запоминающие устройства(ОЗУ) и т.д. Не все эти типы памяти должны быть обязательно предусмотрены. 16 Вместо или в дополнение к клавиатурам 220, 230 и манипуляторам 222, 232 типа мышь также могут быть предусмотрены другие средства ввода, известные специалистам в этой области техники, такие как сенсорные экраны. Может быть беспроводной любая связь в пределах всей показанной установки. На фиг. 5 показан случай, когда два верхних движителя 56(2) и 56(3) направлены в другом направлении, чем движители 56(1) и 56(4). Движители 56(2), 56(3) установлены на приводах 65(1), 65(2) вращательного движения, которые позволяют направлять движители 56(2),56(3) посредством вращения их до 360. Движители 56(2), 56(3), предпочтительно могут управляться независимо, так что каждый из них может быть направлен по разным направлениям. Для того чтобы процессор 240 управления движителями мог точно позиционировать подводное устройство 50, должна быть установлена общая система координат между навигационным процессором 202 и процессором 240 управления движителями. Во-первых, существует стандартная система координат, используемая навигационным процессором 202. Однако две другие системы координат, предпочтительно устанавливаются для подводной системы 50. На фиг. 8 показаны три различные системы координат. Система координат, связанная с навигационным процессором 202, указана навигационной картографической сеткой. Эта система координат использует направление этой навигационной картографической сетки и ее нормаль. Движители 56(2), 56(3) управляются для получения движущей силы в направлении, названном среднее направление движителей. Это направление вместе с его нормалью определяет вторую систему координат. Третья система координат определяется относительно направления системы, которое определяется как направление, перпендикулярное линии, соединяющей между собой движители 56(1), 56(4). Теперь ошибка пути, по которому следует подводное устройство 50, может быть определена в понятии вектора ошибки, который может быть разделен на одну составляющую, параллельную среднему направлению движителей,названную средняя ошибка, и составляющую,нормальную к среднему направлению движителей, названную нормальная средняя ошибка. Соответствующие датчики на подводном устройстве 50 обеспечивают навигационный процессор 202 средним направлением движителей и направлением системы. Из этих данных навигационный процессор 202 создает сетку, как показано на фиг. 8. Ошибка определяется как требуемое положение DP минус положение ТР системы, так что образуется вектор REN 17 относительно начала отсчета навигационной картографической сетки, т.е.DP - ТР = RЕN Кроме того,TN - ориентация системы минус ориентация навигационной картографической сетки,мт - средняя ориентация движителей минус ориентация системы. ТогдаDP - ТР = RЕM, EM = EN - (TN + MT) Теперь RЕM известно, можно вычислить среднюю величину и нормаль к средним ошибкам. Два движителя 56(1) и 56(4) используются для противодействия скручивающим усилиям,приложенным подъемным тросом 42, гидравлическим сопротивлением оборудования и крутящим моментом, наведенным в результате придания направления управлением позиционирования. Контур управления для ориентации требует, чтобы на навигационный процессор 202 подавалась фактическая ориентация системы и требуемая ориентация системы. Фактическая ориентация системы измеряется гирокомпасом 256. Требуемая ориентация вводится вручную оператором. Из этих двух ориентаций контур управления в навигационном процессоре 202 вычисляет угловое расстояние между требуемой ориентацией и фактической ориентацией, а также направление вращения, требуемое для соответствующего перемещения устройства 50. Простой контур управления, управляемый процессором 240 управления движителями, затем регулирует электропитание, подаваемое на движители 56(1) и 56(4), для соответствующего вращения устройства 50. При подаче электропитания на устройство 50 оба движителя 56(2) и 56(3), предпочтительно ориентируются так, что среднее направление движителей направляется параллельно направлению устройства. Затем движителям 56(2),56(3) сообщается угловое отклонение на небольшой вектор от направления системы, что способствует позиционированию устройства 50 в двух плоскостях. Величина этого вектора,предпочтительно регулируется вручную и может потребоваться конфигурирование для каждой различной работы в зависимости от фактических морских условий. Если движители 56(2) и 56(3) были отцентрированы и им придано направление, контур позиционирования может взять управление устройством 50. Контур позиционирования включает еще две фазы. Во время первой следующей фазы, которая осуществляется в то время, когда устройство 50 находится еще вблизи поверхности моря, измеряется направление морского течения блоком 266 доплеровского лага. Направление морского течения передается на навигационный процессор 202. Используя это направление, процессор 18 240 управления движителями, принимающий надлежащие команды от навигационного процессора 202, приводит в действие приводы 65(1), 65(2) вращательного движения, так что среднее направление движителей, по существу,устанавливается противоположным направлению морского течения. Во время этого вращения приводов 65(1), 65(2) вращательного движения ни на один из движителей 56(i) не подается электропитание. Направление устройства измеряется волоконно-оптическим гирокомпасом 256. Глубина постоянно измеряется цифровым кварцевым датчиком 254 глубины, и высота- высотомером 262. Средняя и нормальная к средней ошибки, вычисляемые в соответствии с вышеуказанными уравнениями, затем используются контуром позиционирования для подачи электропитания на движители 56(2) и 56(3) для приведения устройства 50 в требуемое расположение. Во время приведения системы 50 с грузом 43 в положение с требуемыми координатами при помощи движителей 56(2), 56(3) движители 56(1), 56(4) используются для противодействия любому вращению устройства 50 со своим грузом 43. Это обеспечивает лучшее управление,так как, особенно для тяжелых грузов, вращательное движение может привести к другим нежелательным движениям груза, которые могут быть трудные для управления. Когда устройство 50 со своим грузом располагается с требуемыми координатами, груз вместе с устройством 50 опускается при помощи подъемного троса 42. Во время спуска груза 43 груз 43 постоянно управляется устройством 50 для поддержания его в требуемом расположении без какого-либо вращения. На следующей фазе устройство 50 находится, например, на расстоянии приблизительно 200 м или менее от морского дна 4. Затем блок 266 доплеровского лага переходит в режим слежения за дном. Это переводит работу в более точный и быстродействующий режим для окончательного приближения к заданному расположению на морском дне 4. Теперь, блок 266 доплеровского лага и гирокомпас с датчиками 256 движения - используются для фильтрации случайного шума УКБЛ. Если он отфильтрован,хорошее считывание навигационных данных,включая точную скорость устройства 50, делает работу контура управления положением как очень быстрым, так и стабильным. Контур управления с очень точной настройкой приводит к тому, что достигается управления вплоть до движения в несколько сантиметров. Теперь блок 260 гидролокатора и блок 266 доплеровского лага используются для предоставления информации, касающейся окрестности заданной точки, так что груз 43 может быть расположен с правильными координатами и в правильной ориентации. Затем вращение, если оно необходимо, может быть применено к грузу 43 посред 19 ством движителей 56(1), 56(4), управляемых процессором 240 управления движителями. Для движителей 56(2), 56(3) предусмотрены два контура управления: контур управления средней ошибки и дополнительный контур управления для уменьшения нормальной средней ошибки. Контур управления средней ошибки регулирует электропитание поровну между обоими движителями 56(2), 56(3) для уменьшения средней ошибки. По мере того как устройство 50 приближается к заданным координатам, электропитание приведения в действие движителей 56(2), 56(3) снижается до такого уровня, что устройство 50 может поддерживать свое положение в морском течении. Другими словами,первоначально электропитание приведения в действие устанавливается на уровне, который пропорционален средней ошибке. Однако, по мере того как устройство 50 приближается к заданным координатам, контур управления медленно уменьшает электропитание приведения в действие, приложенное к движителям 56(2), 56(3). По мере того как устройство 50 достигает заданных координат, достигается состояние равновесия, когда электропитание приведения в действие движителей 56(2), 56(3) противодействует силе морского течения. Контур управления средней ошибки подает равное электропитание с одинаковыми знаками на оба движителя 56(2), 56(3). Дополнительный контур управления применяется для уменьшения нормальной средней ошибки. Этот дополнительный контур управления регулирует индивидуальное электропитание, приложенное к движителям 56(2), 56(3), так что создается движение, перпендикулярное морскому течению. Дополнительный контур управления прикладывает равное электропитание противоположного знака к обоим движителям 56(2), 56(3) для достижения этого эффекта. Электропитание, приложенное к движителям 56(2), 56(3) для уменьшения нормальной средней ошибки, предпочтительно уменьшается линейно до нуля, по мере того как устройство 50 движется к заданным координатам. В точке, где нормаль к средней ошибке достигает нуля, и предполагая, что не изменилось направление морского течения, устройство 50 будет точно расположено над заданным положением на морском дне 4, и на движители 56(2), 56(3) подается электропитание, чтобы поддерживать устройство 50 с правильными координатами и корректировать с учетом морского течения. Если меняется направление морского течения, то упоминаемым выше контурам управления необходимо будет отрегулировать электропитание, приложенное к движителям и, в конечном счете, изменить направление устройства. Так как новое направление течения воздействует на устройство 50, нормальная средняя ошибка начинает возрастать, по мере того как 20 устройство 50 отходит от заданных координат. Для компенсации этого явления, снова будет выполнено управление для уменьшения до нуля величины нормальной средней ошибки. Направление системы меняется так, что оказывается противодействие морскому течению или естественному сносу устройства 50. Направление вращения приводов 65(1),65(2) вращательного движения определяется знаком нормальной средней ошибки. Для уменьшения времени, необходимого для поворота приводов 65(1), 65(2) вращательного движения в требуемое положение, процессором 240 управления движителями используется алгоритм для определения наикратчайшего маршрута к требуемой ориентации. Предусматривается, что также организуется ручное управление при помощи, например,джойстика (не показан), присоединенного к навигационному процессору 202. Во время позиционирования устройства 50 также, предпочтительно, применяется управление скоростью. Предпочтительно, чем ближе устройство 50 находится к заданным координатам, тем медленнее будет скорость системы 50. Например, если расстояние между устройством 50 и целью превышает заранее определенную первую пороговую величину, движители управляются так, чтобы сообщать устройству 50 максимальную скорость. Между этой первой пороговой величиной и второй пороговой величиной расстояния до заданных координат, при этом вторая пороговая величина меньше первой пороговой величины, используется профиль с линейно уменьшающейся скоростью. В пределах расстояния, меньших, чем вторая пороговая величина, система удерживается на скорости, по существу, равной нулю. Измерение с УКБЛ Принцип измерения с УКБЛ основывается на точном измерении фазы между двумя преобразователями. В одном варианте выполнения используется комбинация короткой базовой линии (КБЛ) и ультракороткой базовой линии(УКБЛ), которая позволяет использовать большое расстояние между преобразователями без какой-либо неопределенности фазы. Для УКБЛ точность зависит от отношения сигнал/шум и расстояния между преобразователями (подобно способу интерферометрии). Затем выполняется компромиссный выбор частоты, которая ограничивается дальностью и гидродинамической частью в смысле размеров. Неопределенность вычисляется посредством использования измерения с КБЛ, объединенного с корреляционной обработкой данных. Посредством использования такой корреляционной обработки повышается отношение сигнал/шум. Следующее выражение определяет общую точность для УКБЛ: где- стандартное угловое отклонение,L - расстояние между преобразователями, - длина волны, - пеленг. Указанное выше выражение показывает, что точность повышается в результате увеличения расстояния L между преобразователями, т.е. увеличения антенной решетки. Кроме того, более высокая частота приводит к повышению точности. Гидродинамические аспекты и неопределенность фазы снижают эти параметры. В результате использования корреляционной обработки данных повышается отношение сигнал/шум. Для оптимизирования дальности и точности, предпочтительно используется частота 16 кГц для измерений фазометром. Процесс корреляции позволяет повысить дальность действия,в то же самое время сохраняя малую длительность импульса для выделения многолучевости. Для измерений неопределенности фазы система работает с КБЛ для определения сектора дальности и с УКБЛ в пределах сектора для достижения наилучшей точности. Дальность может быть увеличена свыше 8000 м посредством использования довольно низкой частоты. Приложение А Фильтр Калмана Фильтр Калмана является, вероятно, наиболее общеизвестным методом в морской промышленности. Он обеспечивает быстрый способ фильтрации, основанный на сравнении по отношению к прогнозируемым величинам, которые вычисляются на основе самой последней предыстории. Мы не рассматриваем подробно калмановскую фильтрацию, но делаем ссылку,например, на "Kalman Filtering - Theory andPrentice Hall (ISBN 0-13-211335-X). Слежение за положением может быть объединено с данными о скорости (доплеровского лага), при этом каждая точка улучшается на основе соседних точек, расстояние во времени и фактическая скорость. Вес между калмановской величиной и улучшенной скоростью определяется посредством доплеровского коэффициента эффективности: более высокие значения в большей степени принимают во внимание скорость. Преимущество Довольно быстрый Может быть улучшен по скорости Недостатки Довольно несглаженный результат Не наилучшая комбинация скорости и положения 22 Фильтр Симпла проходит по всем положениям и вычисляет плавную кривую, давая минимальную квадратичную ошибку, т.е. вид линии подбора методом наименьших квадратов. Преимущество Быстрый Результат сглаженный Недостаток Не используются данные доплеровского лага Не очень подходит для изогнутых траекторий Фильтр Саломонсена Фильтр Саломонсена, который назван в честь датского математика Ханса Антона Саломонсена, профессора и доктора философии университета г. Орхус, представляет собой высоко интегральный фильтр. Он обладает преимуществами кратковременной стабильности отслеживания доплеровской частоты и объединяет ее с долговременной устойчивостью слежения за положением. Описание Фильтр используется в том случае, когда мы объединили во времени данные о положении вдоль траектории, а также доплеровские данные. Доплеровские данные обычно очень точные, но не дают никакой информации об абсолютных положениях. С другой стороны, данные о положении представляют собой абсолютные положения, но они обычно не очень точные. Фильтр объединяет две группы данных и получает точную траекторию с абсолютными положениями. Это выполняется следующим образом. 1. Доплеровские данные используются для составления формы траектории, т.е. траектории,образованной в виде кубического сплайна. 2. Начало в начале координат (0, 0) и скорости определяются доплеровскими данными. 3. Затем данные о положении используются для правильного расположения траектории. Траектория перемещается, вращается и растягивается/сжимается линейно, чтобы соответствовать данным о положении, а также возможному использованию методов наименьших квадратов. 4. К основным данным относится перемещение. Однако, другие изменения служат для корректировки возможных систематических ошибок в доплеровских данных. Тот факт, что данные о положении используются только для выполнения изменений в п.2,означает, что данные о положении подвергаются значительному усреднению. Это уменьшает неопределенность определения положения. Таким образом, если имеется много данных о положении, абсолютное положение траектории,как ожидается, должно быть более точным, чем каждое отдельное определение положения.X. А. Саломонсен Математическое описание Алгоритм разделен на пять шагов: Шаг 1: Вычисляет ускорения для каждой точки 1/2hk+1(X1"+Xk+1")=Xk+1'-Xk' гдеhk=tk-tk-1,tk - временная метка для измерения скорости;Xk" - вычисленное ускорение в tk. Шаг 2: Вычисляет следующее положение, основываясь на ускорении и скорости и предыдущем вычисленном положении (основанным на предыдущих измерениях скорости и ускорениях)Xk - вычисленное положение в tk (временной метке скорости). Шаг 3: Вычисляет положения в фактические временные метки (используя положение первых измерений скорости)X(t) - положение в момент времени t. Шаг 4: Добавляет положение первых измерений скорости к вычисленным положениям. Шаг 5: Перемещает, вращает, вытягивает или сжимает вычисленные положения для наилучшего соответствия реальной линии положения. Затем фильтр считывает запись о положении, которая хранится для последующей обработки. Когда считывается запись о скорости, создается узел. Любые положения, считываемые между предыдущей и настоящей (во времени) записями о скорости, регулируются так, чтобы соответствовать кривой. Предыстория Параметр коэффициента усиления фильтра, величина от 0 до 1, управляет влиянием данных доплеровского лага и предыстории на текущую точку. Для величины 1 данные доплеровского лага и предыстория в линии имеют больший вес. Меньшие величины имеют место только тогда,когда существует больше записей о положении,чем действительных записей о скорости. Полезные величины находятся в диапазоне от 0,9 до 1, например 0,99. Коррекция ошибок Записи о положении и скорости могут сравниваться с прогнозируемыми величинами,используя предыдущие данные. Могут быть установлены пределы для отказа от данных. Сброс Если имеется много точек с ошибочными данными, то существует опасность, что фильтр потеряет траекторию. Оператор может вручную произвести сброс фильтра, т.е. аннулировать его предысторию (делаются попытки разработать автоматический сброс). Преимущество Он объединяет наилучшее из доплеровских данных и положений Принимает во внимание все данные. Сглаженный результат Преимущество Он объединяет наилучшее из доплеровских данных и положений Быстрый Недостаток Медленный вследствие комплексной матрицы Зависит от хорошего доплеровского лага Минимальный вариант фильтра Саломонсена Минимальный вариант фильтра Саломонсена, который впервые был представлен в программе NaviBat On-line, был изобретен для того, чтобы иметь более быстрое решение, объединяя лучшее из двух способов. Вследствие своей диалоговой природы, он использует только предысторию для определения фильтрации точки. Следовательно, результат будет более грубый в начале линии и становится лучше по мере его продвижения. Основной принцип действия Работа фильтра начинается с вызова сброса для инициализации фильтра. Сброс выполняется с использованием первого измерения скорости. Фильтр использует данные как о скорости, так и о положении. Создается кривая кубического сплайна с использованием записей о скорости и соответствием положениям, насколько возможно для этой кривой. Общий результат сглаженный. Может обрабатывать доплеровские данные с шумами. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство (50) для размещения предмета (43) в заданном положении под водой,причем устройство снабжено маяком для передачи акустического излучения и множеством движителей (56(i), i=1, 2I, при этом I является целым числом) для управления позиционированием упомянутого устройства относительно упомянутого заданного положения под водой,отличающееся тем, что устройство снабжено измерителем (258) скорости звука для непрерывного измерения скорости звука в текучей среде, окружающей упомянутое устройство, и передачи данных о скорости звука в реальном времени. 2. Устройство по п.1, отличающееся тем,что упомянутые движители включают первую группу движителей (56(1), 56(4 для обеспечения функции управления крутящим моментом, и вторую группу движителей (56(2), 56(3 для 25 обеспечения, по меньшей мере, функции перемещения, причем каждый движитель из упомянутой второй группы движителей (56(2), 56(3 предусмотрен с приводом (65(1), 65(2 вращательного движения. 3. Устройство по любому из пп.1 или 2,отличающееся тем, что упомянутое устройство снабжено гирокомпасом с датчиками (256) движения для восприятия бортовой качки и килевой качки устройства при использовании. 4. Устройство по любому из предыдущих пунктов, отличающееся тем, что устройство снабжено блоком (260) гидролокатора для определения положения упомянутого устройства относительно по меньшей мере одного объекта,внешнего для упомянутого устройства. 5. Устройство по п.4, отличающееся тем,что устройство снабжено блоком (266) доплеровского лага для измерения силы течения упомянутой текучей среды. 6. Устройство по любому из предыдущих пунктов, отличающееся тем, что содержит динамометрические элементы (268) для измерения веса груза (43), зацепляемого устройством. 7. Устройство по любому из предыдущих пунктов, отличающееся тем, что устройство снабжено датчиком (266) температуры для измерения температуры упомянутой текучей среды и передачи данных о температуре в реальном времени. 8. Устройство по любому из предыдущих пунктов, отличающееся тем, что устройство снабжено солемером (266) для измерения солености упомянутой текучей среды и передачи данных о солености в реальном времени. 9. Устройство обработки данных, предназначенное для приведения в действие устройства (50) для размещения объекта (43) в заданном положении под водой, причем устройство снабжено маяком для передачи акустического излучения, множеством движителей (56(i), i=1, 2I,при этом I является целым числом) для управления позиционированием упомянутого устройства относительно упомянутого заданного положения под водой, и измерителем (258) скорости звука для непрерывного измерения скорости звука в текучей среде, окружающей упомянутое устройство, и передачи данных о скорости звука в реальном времени, причем устройство обработки снабжено акустическим приемником(250) для приема упомянутого акустического излучения, при этом указанное устройство обработки данных предназначено для использования данных, получаемых из упомянутого акустического излучения при вычислении для определения положения устройства, а также для приема оперативных данных измерителя скорости звука от упомянутого измерителя (258) скорости звука для непрерывного определения профиля скорости звука в упомянутой текучей среде и вычисления из упомянутого профиля скорости звука искривления упомянутого аку 004201 26 стического излучения, передаваемого устройством через текучую среду, и использовании его при вычислении для определения положения упомянутого устройства в реальном времени. 10. Устройство обработки данных по п.9,отличающееся тем, что упомянутые движители устройства 50 содержат первую группу движителей (56(1), 56(4, предназначенную для создания функции управления крутящим моментом, и вторую группу движителей (56(2), 56(3,предназначенную для создания, по меньшей мере, функции перемещения, причем каждый движитель из упомянутой второй группы движителей (56(2), 56(3 снабжен приводом (65(1),65(2 вращательного движения, и упомянутое устройство обработки данных предназначено для выполнения во время использования следующих функций: управления приложением электропитания приведения в действие к упомянутым движителям упомянутой первой группы движителей(56(1), 56(4 для поддержания упомянутого устройства в требуемой ориентации в первой плоскости, определяемой движущими силами,создаваемыми упомянутыми движителями(56(1), 56(4 упомянутой первой группы; управления приложением электропитания приведения в действие к упомянутым движителям упомянутой второй группы движителей (56(2),56(3 и упомянутым приводам (65(1), 65(2 вращательного движения для перемещения упомянутого устройства по среднему направлению и направлению, перпендикулярному упомянутому среднему направлению, в требуемое расположение, причем упомянутое среднее направление и упомянутое направление, параллельное упомянутому среднему направлению,находятся во второй плоскости, определяемой движущими силами, создаваемыми упомянутыми движителями (56(1), 56(4 упомянутой второй группы. 11. Устройство обработки данных по п.10,отличающееся тем, что в упомянутом устройстве (50) упомянутая первая и вторая плоскости не являются совпадающими, причем устройство обработки данных предназначено для приема первых чувствительных сигналов от гирокомпаса с датчиками (256) движения на устройстве(50) в отношении бортовой качки и килевой качки устройства при использовании. 12. Устройство обработки данных по п.11,отличающееся тем, что первые чувствительные сигналы от гирокомпаса с датчиками (256) движения используются при вычислении для определения пространственного положения устройства (50). 13. Устройство обработки данных по любому из пп.9-12, отличающееся тем, что устройство (50) содержит датчик (266) температуры, в котором устройство обработки данных предназначено для приема данных о температуре от упомянутого датчика температуры, чтобы об 27 новлять профиль температуры в упомянутой текучей среде и способствовать коррекции при определении положения упомянутого устройства (50) в реальном времени. 14. Устройство обработки данных по любому из пп.9-13, отличающееся тем, что устройство (50) содержит солемер (266), в котором устройство обработки данных предназначено для приема данных о солености от упомянутого солемера для обновления профиля солености в упомянутой текучей среде и коррекции определения положения упомянутого устройства (50) в реальном времени. 15. Судно, снабженное устройством обработки данных по любому из пп.9-14. 16. Судно по п.15, отличающееся тем, что судно снабжено гидроакустической антенной решеткой (250) , прикрепленной к корпусу судна, и поверхностным блоком (234) с ультракороткой базовой линией на борту судна, предназначенным для связи с упомянутой гидроакустической антенной решеткой (250), причем гидроакустическая антенная решетка (250) предназначена для приема акустических сигналов, по меньшей мере, от упомянутого устройства (50) и передачи выходных данных гидроакустической антенной решетки на упомянутое устройство обработки данных, которое предназначено для выполнения в реальном времени вычисления положения, по меньшей мере, упомянутого устройства (50) относительно упомянутой гидроакустической антенной решетки(250), основываясь на упомянутых выходных данных гидроакустической антенной решетки. 17. Судно по п.16, отличающееся тем, что гидроакустическая антенная решетка (250) содержит измеритель (248) скорости звука для измерения скорости звука в слоях текучей среды как раз под судном и передачи выходных данных измерителя скорости звука на упомянутое устройство обработки данных, причем упомянутое устройство обработки данных предназначено для корректировки упомянутого вычисления упомянутого положения упомянутого устройства (50), основанного на упомянутых выходных данных измерителя скорости звука в реальном времени. 18. Судно по п.16 или 17, отличающееся тем, что гидроакустическая антенная решетка(250) содержит гирокомпас (252) гидроакустической антенной решетки для измерения вертикальной качки, бортовой качки и килевой качки гидроакустической антенной решетки (250) и передачи выходных данных гирокомпаса гидроакустической антенной решетки на упомянутое устройство обработки данных, причем устройство обработки данных предназначено для корректировки упомянутого вычисления упомянутого положения упомянутого устройства (50),основанного на упомянутых выходных данных 28 гирокомпаса гидроакустической антенной решетки в реальном времени. 19. Судно по любому из пп.15-18, отличающееся тем, что судно содержит гирокомпас(206) судна для измерения вертикальной качки,бортовой качки и килевой качки судна и передачи выходных данных гирокомпаса судна на упомянутое устройство обработки данных, причем устройство обработки данных предназначено для коррекции упомянутого вычисления упомянутого положения упомянутого устройства (50), основанного на упомянутых выходных данных гирокомпаса судна в реальном времени. 20. Система, содержащая судно по любому из пп.15-19 и устройство по любому из пп.1-8,причем устройство и устройство обработки данных предназначены для связи друг с другом. 21. Система по п.20, отличающаяся тем,что устройство и устройство обработки данных соединены посредством волоконно-оптических(де)мультиплексоров (244, 246), соединенных между собой оптоволокном. 22. Способ приведения в действие устройства (50) для размещения объекта (43) в заданном положении под водой, причем устройство снабжено маяком для передачи акустического излучения, множеством движителей (56(i), i=1,2I, причем I является целым числом) для управления позиционированием упомянутого устройства относительно упомянутого заданного положения под водой и измерителем (258) скорости звука для непрерывного измерения скорости звука в текучей среде, окружающей упомянутое устройство, и передачи данных о скорости звука в реальном времени, причем способ включает следующие этапы: прием упомянутого акустического излучения,использование данных, получаемых из упомянутого акустического излучения, при вычислении для определения положения устройства,прием данных измерителя скорости звука от упомянутого измерителя (258) скорости звука и непрерывное определение профиля скорости звука в упомянутой текучей среде и вычисление из упомянутого профиля скорости звука искривления упомянутого акустического излучения, передаваемого устройством через текучую среду, и использование его при вычислении для определения положения упомянутого устройства. 23. Продукт компьютерной программы,содержащий данные и команды, которые после загрузки обрабатывающим оборудованием предоставляет упомянутому оборудованию возможность выполнять способ по п.22. 24. Носитель данных, снабженный продуктом компьютерной программы по п.23.
МПК / Метки
МПК: E21B 41/04, B63C 11/42
Метки: повышенной, положении, груза, устройством, точностью, водой, размещения, управления, заданном, способ, таким, устройство
Код ссылки
<a href="https://eas.patents.su/16-4201-ustrojjstvo-dlya-razmeshheniya-gruza-v-zadannom-polozhenii-pod-vodojj-s-povyshennojj-tochnostyu-i-sposob-upravleniya-takim-ustrojjstvom.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство для размещения груза в заданном положении под водой с повышенной точностью и способ управления таким устройством</a>
Устройство управления замыканием и/или размыканием, в частности, для коммутационного аппарата типа выключателя и выключатель, оборудованный таким устройством
Номер патента: 3999
Опубликовано: 25.12.2003
Авторы: Рафар Дени, Болонжеа Роже, Эро Катрин
МПК: H01H 33/38
Метки: устройством, выключатель, замыканием, частности, оборудованный, типа, коммутационного, аппарата, размыканием, устройство, управления, выключателя, таким
Формула / Реферат:
1. Устройство управления размыканием и/или замыканием, в частности, для коммутационного устройства типа выключателя, содержащее якорь, механически соединенный с приводным стержнем контактов коммутационного устройства и выполненный с возможностью перемещения в опорном блоке между положением покоя и активным положением, по меньшей мере один постоянный магнит и по меньшей мере одну обмотку, размещенную в опорном блоке, причем магнит (магниты)...
Соединительное вспомогательное устройство и контактный зажим, снабженный таким вспомогательным устройством.
Номер патента: 1671
Опубликовано: 25.06.2001
Авторы: Диконн Робер, Филипп Дидье, Лепретр Бернар
МПК: H01R 4/38
Метки: контактный, вспомогательное, устройство, зажим, снабженный, таким, соединительное, вспомогательным, устройством
Формула / Реферат:
1. Соединительное вспомогательное устройство для подсоединения электрического проводника, такого как алюминиевый кабель, к контактной пластине электрического прибора, такого как автоматический выключатель, содержащее контактную площадку, выполненную из проводящего материала, причем упомянутая контактная площадка предназначена для закрепления съемным образом на контактной пластине и для приема проводника, прижимаемого к контактной площадке...
Высоковольтное устройство в корпусе, защищающем от мобильных электрических зарядов, и искусственный спутник земли, оборудованный таким устройством
Номер патента: 2207
Опубликовано: 28.02.2002
Авторы: Бертелье Жан-Жак, Мартино Патрик
МПК: H05K 9/00
Метки: защищающем, высоковольтное, электрических, искусственный, устройством, зарядов, оборудованный, корпусе, таким, земли, мобильных, устройство, спутник
Формула / Реферат:
1. Высоковольтное устройство для применений на космических аппаратах, содержащее, по меньшей мере, одну схему высокого напряжения (6) и корпус (8), по меньшей мере, с одним отверстием (10), обеспечивающим сообщение между внутренним объемом и внешним пространством, отличающееся тем, что оно дополнительно содержит защитные средства (16, 18), электрически связанные с корпусом и расположенные напротив отверстия для предотвращения проникания...
Арифметическое устройство для работы с целыми числами с многократно увеличенной точностью
Номер патента: 2183
Опубликовано: 28.02.2002
Авторы: Сабин Михаэл, Хайзинг Марк В.
МПК: G06F 7/36
Метки: арифметическое, устройство, точностью, увеличенной, целыми, работы, многократно, числами
Формула / Реферат:
1. Арифметическое устройство для работы с целыми числами с многократно увеличенной точностью для обработки первого сигнала данных y со вторым сигналом данных х, включающее множество блоков больших чисел (ББЧ), ББЧ{0}, ББЧ{1}, ББЧ{2},..., ББЧ{n-1}, где n - общее количество блоков больших чисел во множестве блоков больших чисел, причем каждый блок больших чисел содержит умножитель с первым входом умножителя, вторым входом умножителя, выходом...
Система для управления вращающимся устройством
Номер патента: 3259
Опубликовано: 27.02.2003
Авторы: Бритс Людвиг Эмма, Кристи Виктор Джон
МПК: H02P 7/36
Метки: вращающимся, система, устройством, управления
Формула / Реферат:
1. Система для управления вращающимся устройством, содержащая контроллер и вращающееся устройство, которое имеет ротор и статор, причем контроллер подключен ко вращающемуся устройству для управления вращением вращающегося устройства, и при этом контроллер выполнен с возможностью периодического возбуждения, по меньшей мере, одной катушки возбуждения устройства для создания магнитного поля некоторой полярности, которое заставляет ротор вращаться в...
Предыдущий патент: Интерактивный географический каталог
Следующий патент: Терапевтическое средство с ботулиническим нейротоксином
Случайный патент: Медицинская камера