Способ и устройство для измерения магнитного поля с помощью магниторезистивного датчика
Формула / Реферат
1. Способ измерения величины внешнего магнитного поля с использованием магниторезистивного датчика, отличающийся тем, что включает
первый этап, на котором перед каждым измерением величины внешнего магнитного поля к пространству, содержащему магниторезистивный датчик, прилагают по меньшей мере один импульс дополнительного магнитного поля, причем указанный первый этап включает два подэтапа, на одном из которых прилагают импульс дополнительного магнитного поля, имеющий первое значение положительной полярности и амплитуды, достаточной для насыщения датчика, и измеряют максимальное значение (Rmax) сопротивления датчика при верхнем насыщении, и на другом из которых прилагают импульс дополнительного магнитного поля, имеющий второе значение отрицательной полярности и амплитуды, достаточной для насыщения датчика, и измеряют минимальное значение (Rmin) сопротивления датчика при нижнем насыщении, и
второй этап, на котором прилагают указанное дополнительное магнитное поле заранее определенной величины, которая не приводит к насыщению датчика, и измеряют эффективное сопротивление (Reff) магниторезистивного датчика, причем измерения эффективного сопротивления (Reff) автоматически калибруют с использованием ранее измеренных максимального и минимального значений (Rmax, Rmin) сопротивления датчика при верхнем и нижнем насыщении для определения скорректированного значения (Rcor) сопротивления, по которому определяют величину внешнего магнитного поля.
2. Способ по п.1, отличающийся тем, что на первом этапе осуществляют первым подэтап, включающий приложение дополнительного магнитного поля положительной полярности.
3. Способ по п.1, отличающийся тем, что на первом этапе осуществляют первым подэтап, включающий приложение дополнительного магнитного поля отрицательной полярности.
4. Способ по любому из пп.1-3, отличающийся тем, что указанная заранее определенная величина равна нулю.
5. Способ по п.4, отличающийся тем, что скорректированное значение (Rcor) сопротивления получают по следующей формуле:

где Rref max и Rref min - максимальное эталонное сопротивление при верхнем насыщении при данной температуре, выбранной для калибровки датчика, и минимальное эталонное сопротивление при нижнем насыщении при указанной температуре соответственно.
6. Способ по любому из пп.1-5, отличающийся тем, что импульс дополнительного магнитного поля создают при помощи катушки (6) индуктивности, расположенной вблизи магниторезистивного датчика (5).
7. Способ по любому из пп.1-5, отличающийся тем, что импульс дополнительного магнитного поля создают при помощи токового слоя (33), в который подают ток и который расположен вблизи магниторезистивного датчика (32).
8. Способ по п.4, отличающийся тем, что дополнительно включает в себя этап предварительной калибровки, на котором калибровочные значения записывают в калибровочную таблицу, причем на втором этапе скорректированное значение (Rcor) сопротивления определяют путем сравнения фактически измеренного эффективного (Reff) сопротивления с калибровочными значениями, сохраненными в калибровочной таблице.
9. Способ по п.8, отличающийся тем, что этап предварительной калибровки периодически повторяют.
10. Способ по любому из пп.1-3, отличающийся тем, что величину внешнего магнитного поля измеряют при помощи отрицательной обратной связи, которая заключается в приложении на втором этапе такого дополнительного магнитного поля, при котором сопротивление (R) магниторезистивного датчика имеет промежуточное значение, находящееся между предельными значениями (Rmin) и (Rmax) сопротивления магниторезистивного датчика, определенными на первом этапе.
11. Способ по любому из пп.1-10, отличающийся тем, что дополнительно включает этап сравнения минимального значения (Rmin) сопротивления при нижнем насыщении и максимального значения (Rmax) сопротивления при верхнем насыщении магниторезистивного датчика, определенных на первом этапе, с заранее определенными допустимыми значениями, и этап выдачи предупреждающего сообщения в случае несовпадения с указанными заранее определенными допустимыми значениями.
12. Способ по любому из пп.1-11, отличающийся тем, что магниторезистивный датчик (5; 32) содержит по меньшей мере одно магнитное сопротивление по меньшей мере одно из следующих типов: анизотропное магнитное сопротивление (AMR); гигантское магнитное сопротивление (GMR); туннельное магнитное сопротивление (TMR) и колоссальное магнитное сопротивление (CMR).
13. Устройство для измерения величины магнитного поля с использованием магниторезистивного датчика, отличающееся тем, что содержит по меньшей мере один магниторезистивный датчик (10; 5; 32), измерительные средства (50) для измерения сопротивления указанного магниторезистивного датчика, генераторные средства (40, 6; 33) для генерирования дополнительного магнитного поля в пространстве, содержащем магниторезистивный датчик (10; 5; 32), и средства (60) управления, выполненные с возможностью, с одной стороны, избирательного управления генераторными средствами (40, 6; 33) для приложения импульса дополнительного магнитного поля, имеющего первое значение первой положительной или отрицательной полярности и амплитуды, достаточной для насыщения магниторезистивного датчика (10; 5; 32), и, с другой стороны, с возможностью избирательного управления указанными измерительными средствами (50) с целью измерения сопротивления магниторезистивного датчика (10; 5; 32), причем средства (60) управления обеспечивают возможность перед каждым измерением внешнего магнитного поля приложения первого импульса дополнительного магнитного поля, имеющего первое значение положительной полярности и амплитуды, достаточной для насыщения датчика (10; 5; 32), измерения максимального значения (Rmax) сопротивления датчика (10; 5; 32) при верхнем насыщении, приложения второго импульса дополнительного магнитного поля, имеющего второе значение отрицательной полярности и амплитуды, достаточной для насыщения датчика, измерения минимального значения (Rmin) сопротивления датчика (10; 5; 32) при нижнем насыщении, приложения указанного дополнительного магнитного поля заранее заданной величины, не вызывающего насыщения датчика (10; 5; 32), и измерения эффективного сопротивления (Reff) магниторезистивного датчика (10; 5; 32), при этом средства (60) управления обеспечивают возможность автоматической калибровки измерений эффективного сопротивления (Reff) с использованием ранее определенных максимального значения (Rmax) сопротивления при верхнем насыщении и минимального значения (Rmin) сопротивления при нижнем насыщении для определения скорректированного значения (Rcor) сопротивления, по которому определяют величину магнитного поля.
14. Устройство по п.13, отличающееся тем, что дополнительно содержит средства (70) хранения данных для хранения калибровочных значений сопротивления магниторезистивного датчика (10; 5; 32).
15. Устройство по п.13 или 14, отличающееся тем, что магниторезистивный датчик (5; 32) содержит по меньшей мере одно магнитное сопротивление по меньшей мере одного из следующих типов: анизотропное магнитное сопротивление (AMR), гигантское магнитное сопротивление (GMR), туннельное магнитное сопротивление (TMR) и колоссальное магнитное сопротивление (CMR).
16. Устройство по любому из пп.13-15, отличающееся тем, что генераторные средства для генерирования дополнительного магнитного поля содержат катушку (6) индуктивности, расположенную вблизи магниторезистивного датчика (5).
17. Устройство по любому из пп.13-15, отличающееся тем, что генераторные средства для генерирования дополнительного магнитного поля содержат токовый слой (33), в который подают ток, расположенный вблизи магниторезистивного датчика (32).
18. Устройство по п.17, отличающееся тем, что токовый слой (33), т который подают ток, расположен над или под магниторезистивным датчиком (32), который выполнен встроенным, причем между ними предусмотрен промежуточный слой изолирующего материала.
19. Устройство по п.17, отличающееся тем, что токовый слой (33), в который подают ток, расположен на поверхности подложки (35), противоположной ее поверхности, на которой установлен магниторезистивный датчик (32).
20. Устройство по любому из пп.13-19, отличающееся тем, что дополнительно содержит средства проверки допустимости значений сопротивления, измеренных при приложении генераторными средствами (6; 33) импульса дополнительного магнитного поля, и предупреждающие средства (80), управляемые указанными средствами проверки допустимости значений.
21. Устройство по любому из пп.13-20, отличающееся тем, что измерительные средства (50) для измерения сопротивления магниторезистивного датчика (5; 32) содержат средства для измерения силы тока, необходимой для приведения измеренного сопротивления магниторезистивного датчика (5; 32) к эталонному значению (Rref), находящемуся между предельными значениями (Rmin, Rmax) магнитного сопротивления магниторезистивного датчика (5; 32), измеренными при включенных генераторных средствах (40) для генерирования дополнительного магнитного поля, причем эталонное значение (Rref) представляет собой линейную комбинацию предельных значений (Rmin, Rmax).

Текст
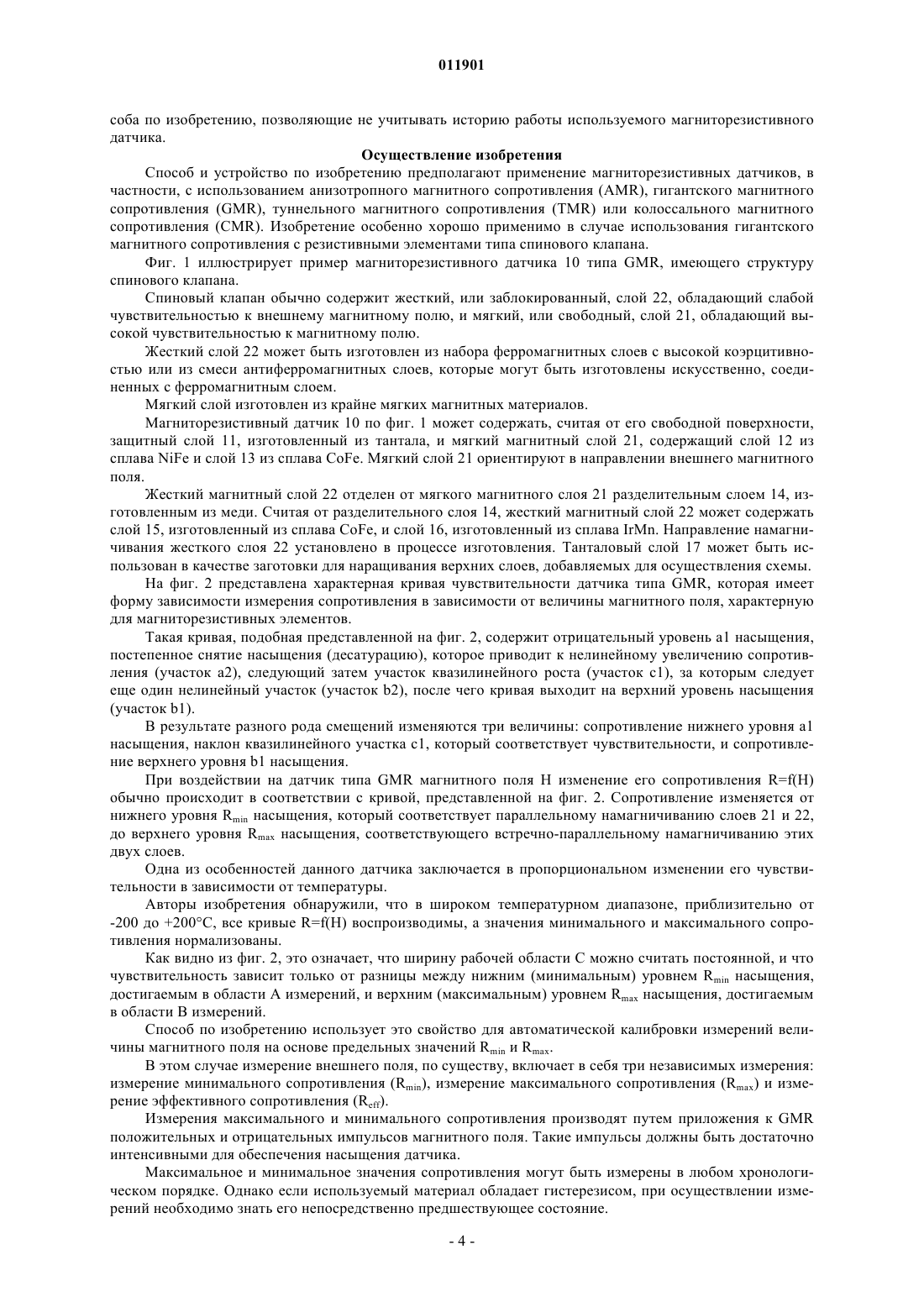
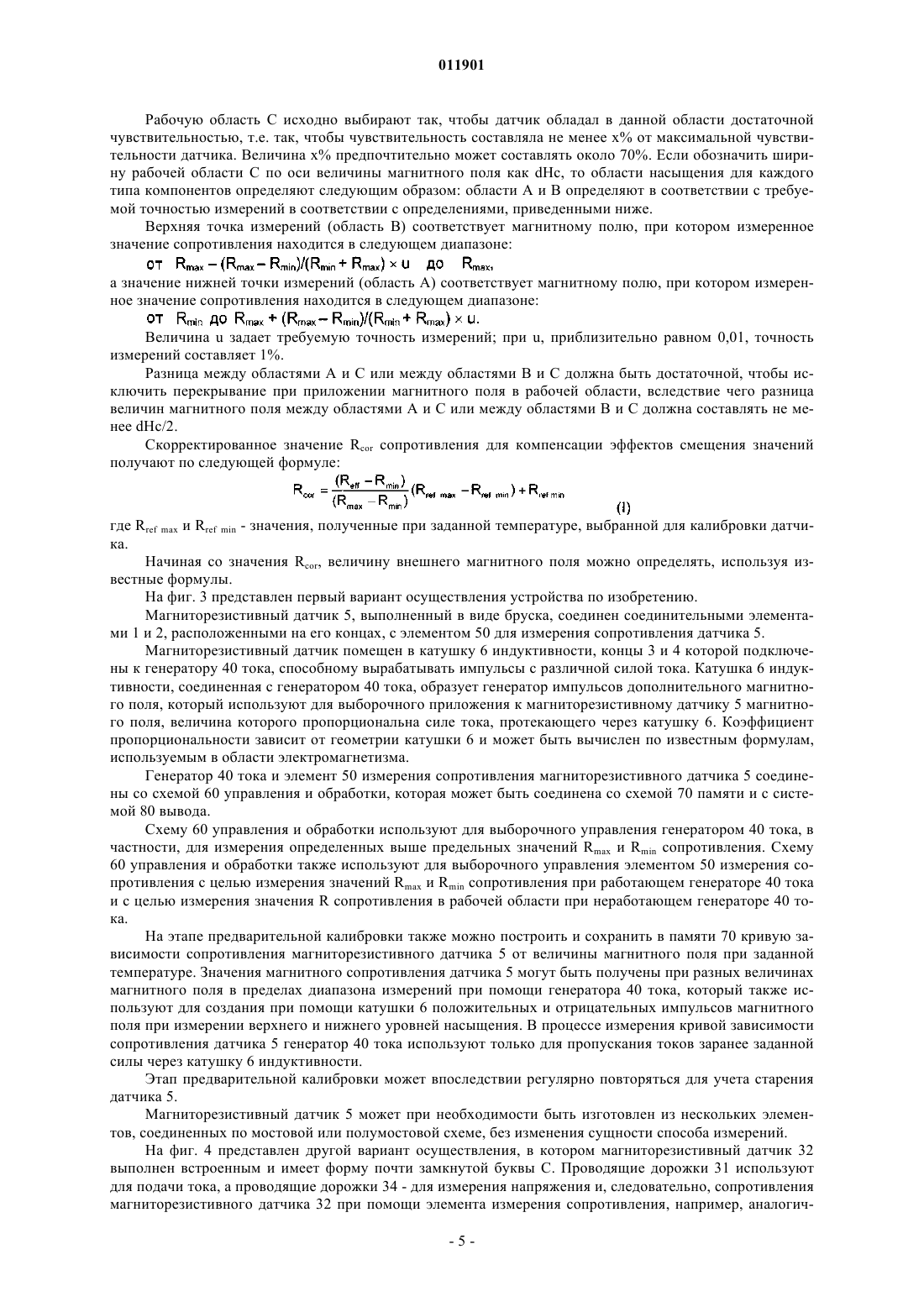
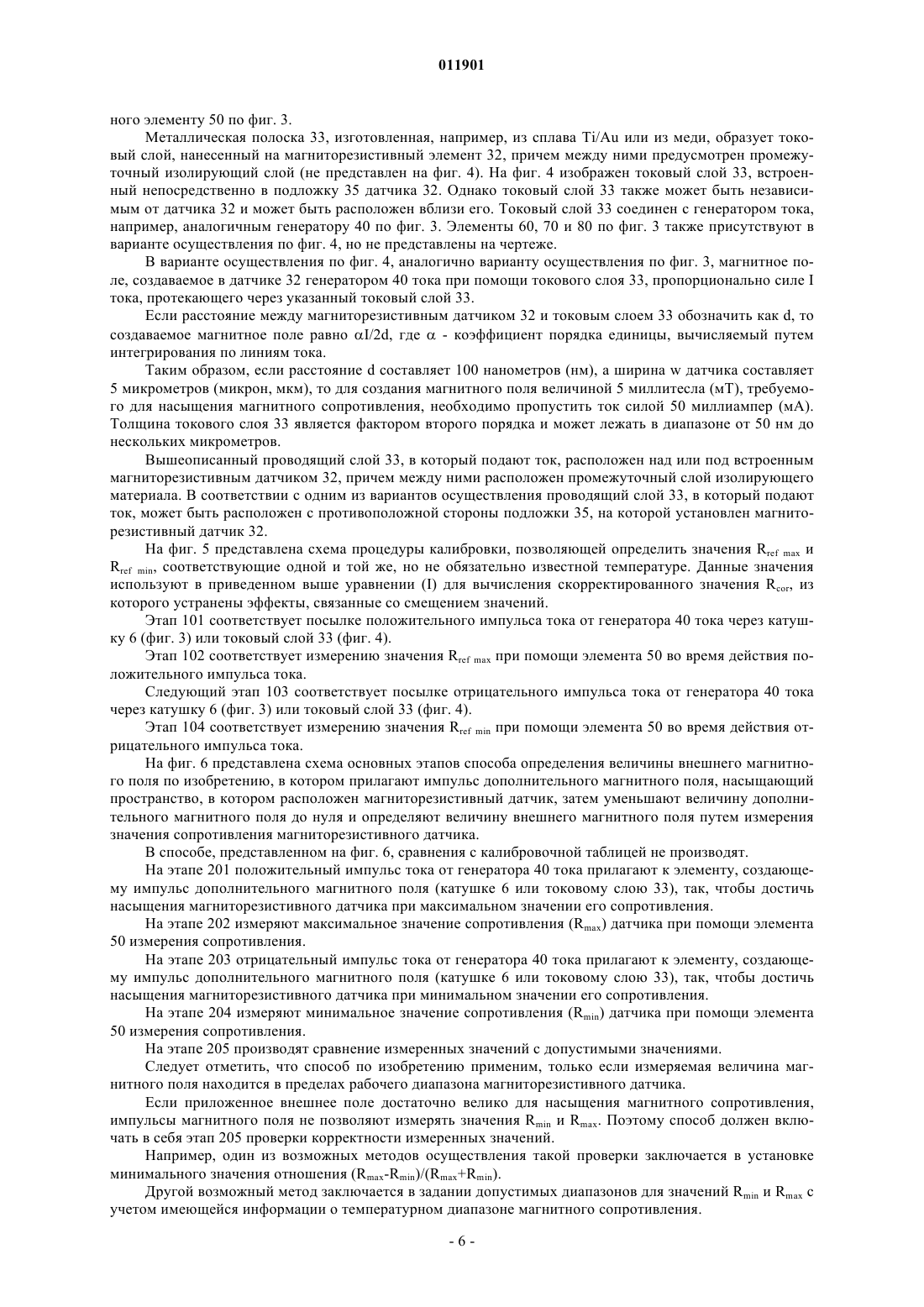
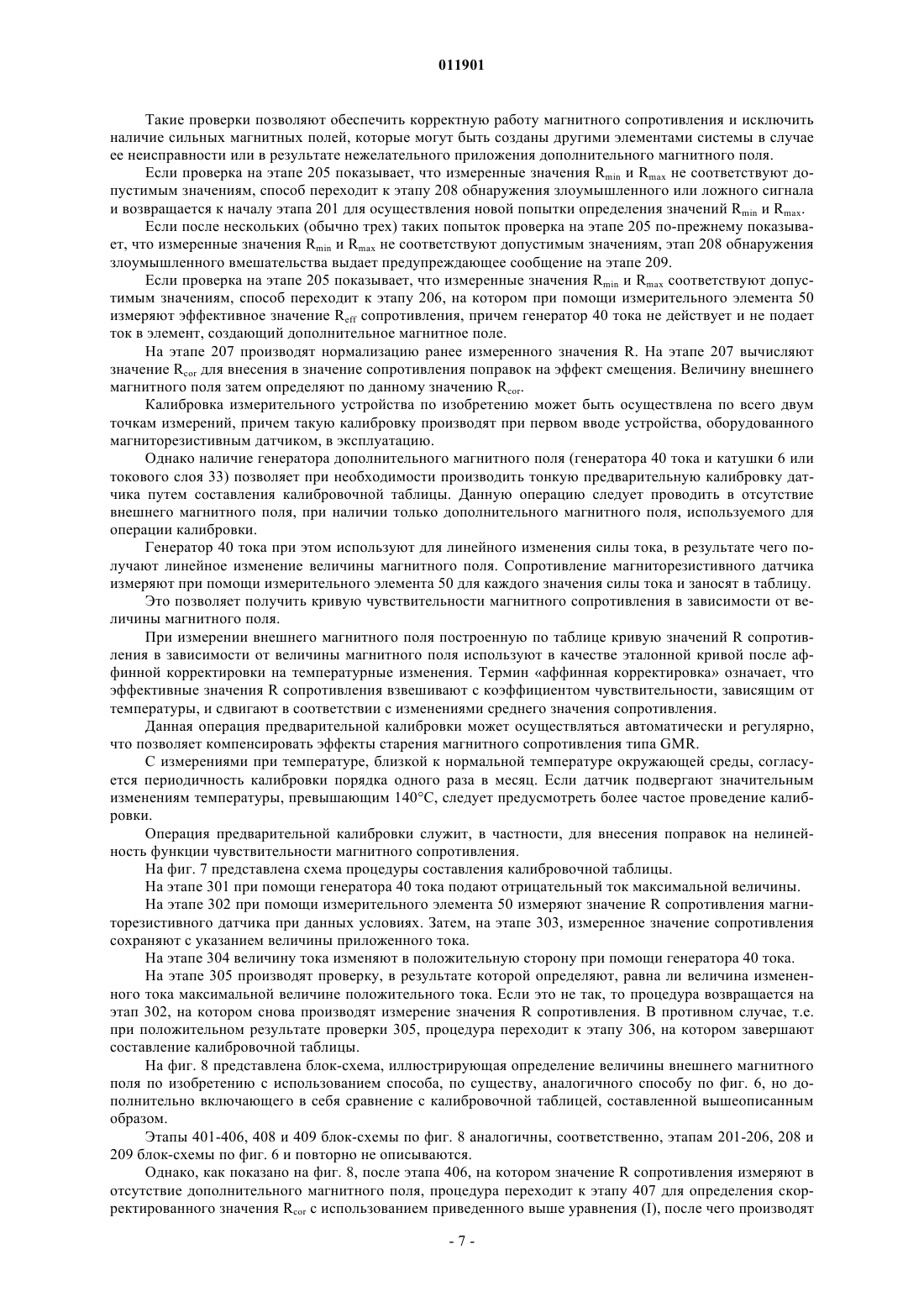
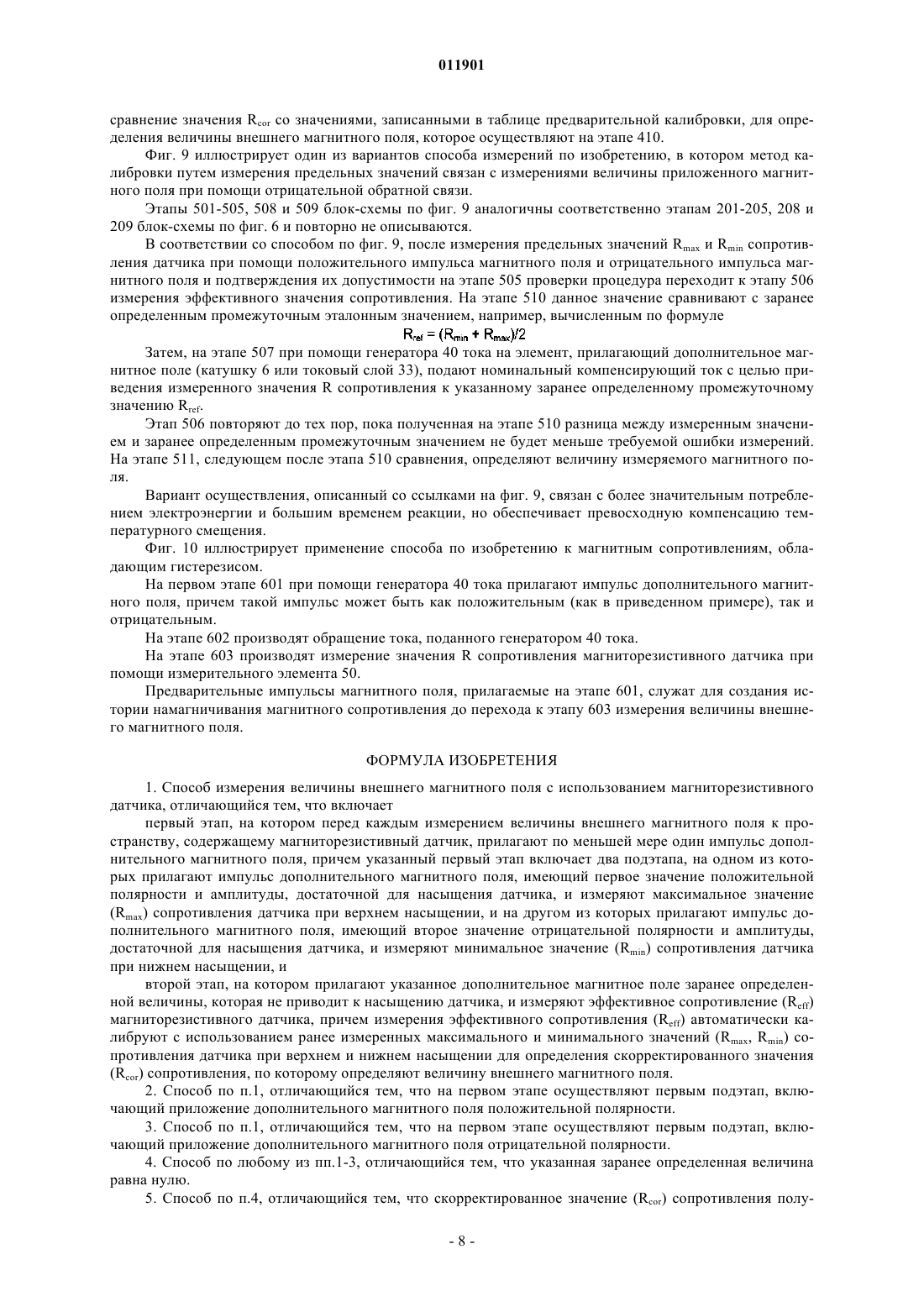
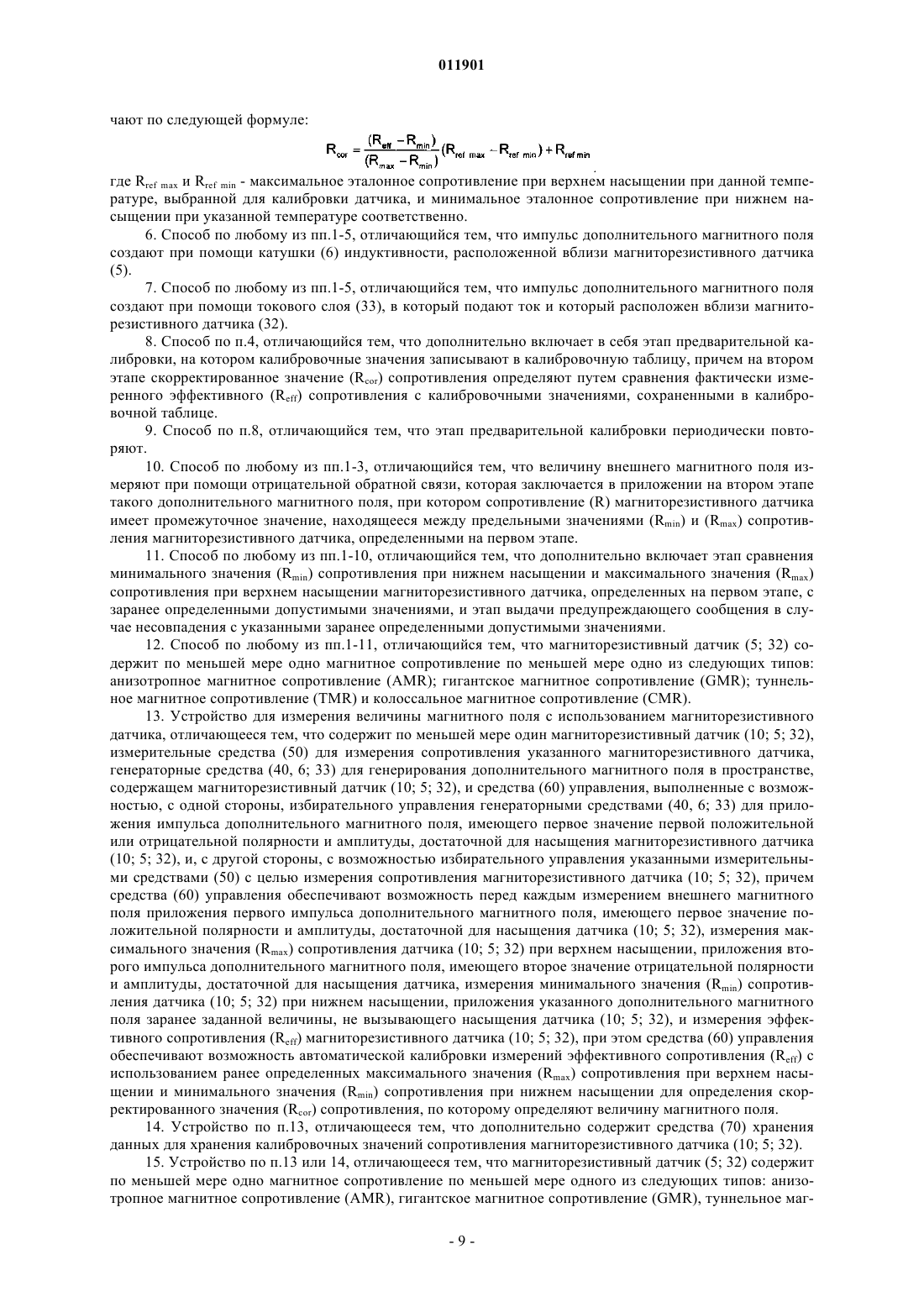
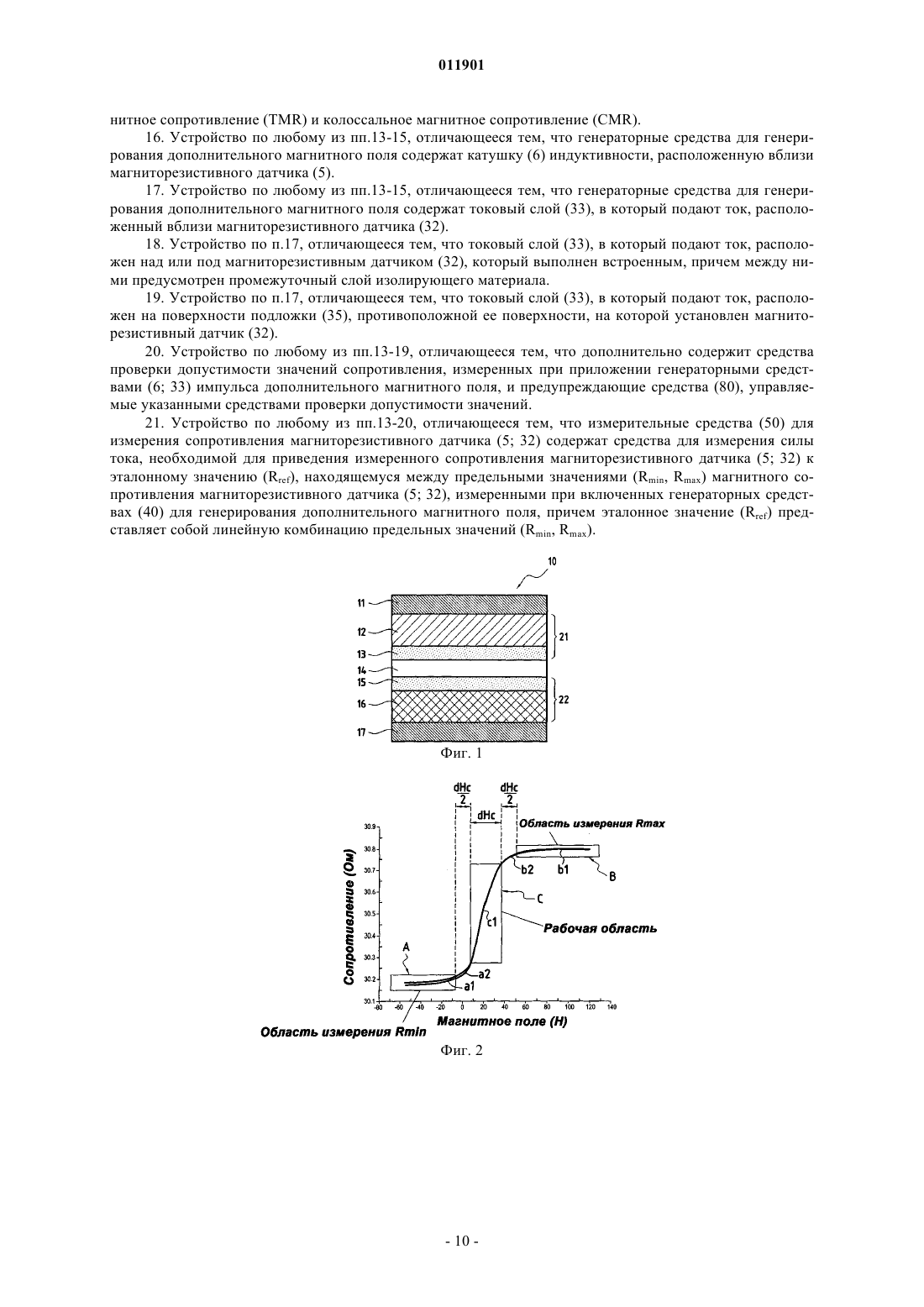
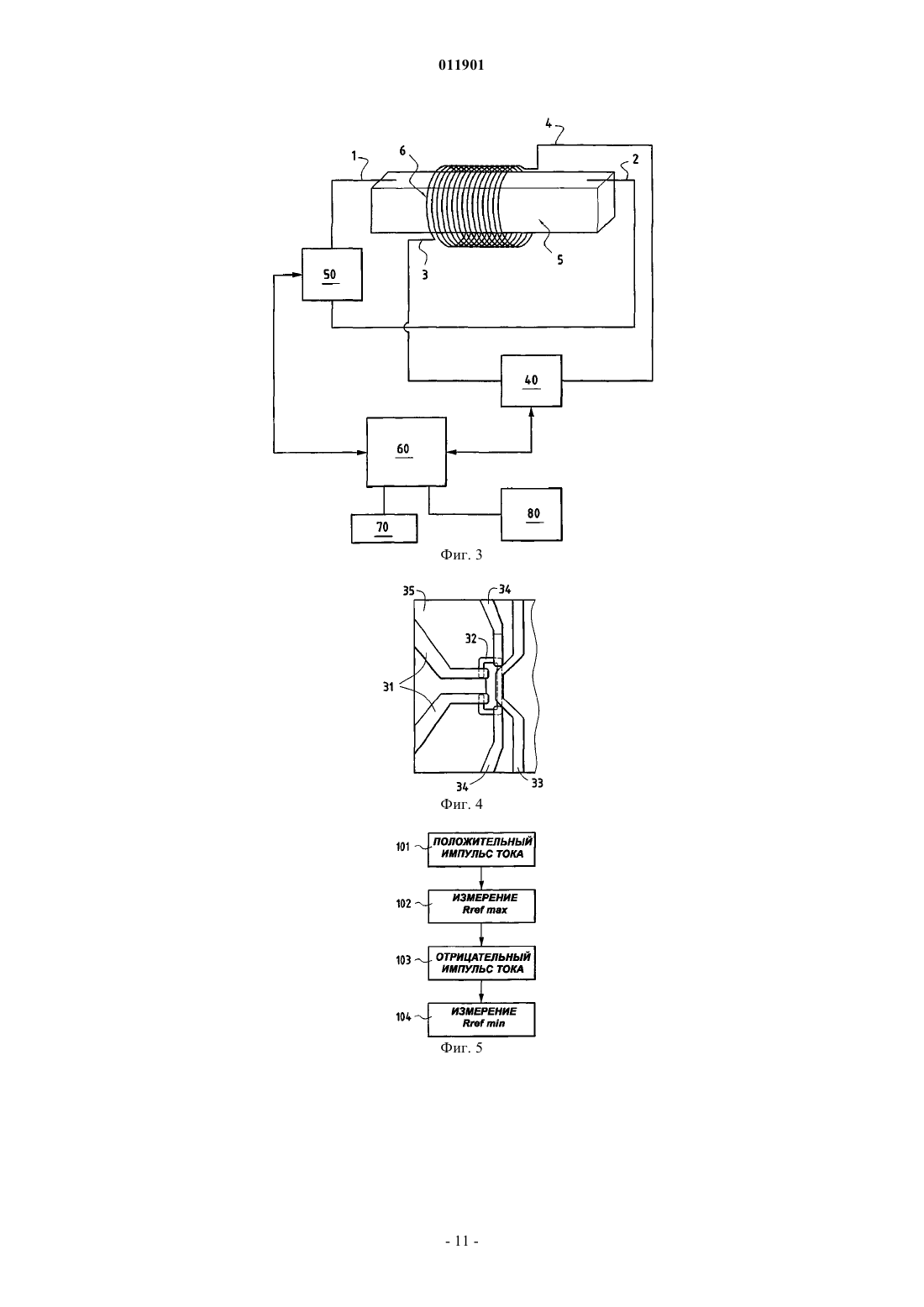
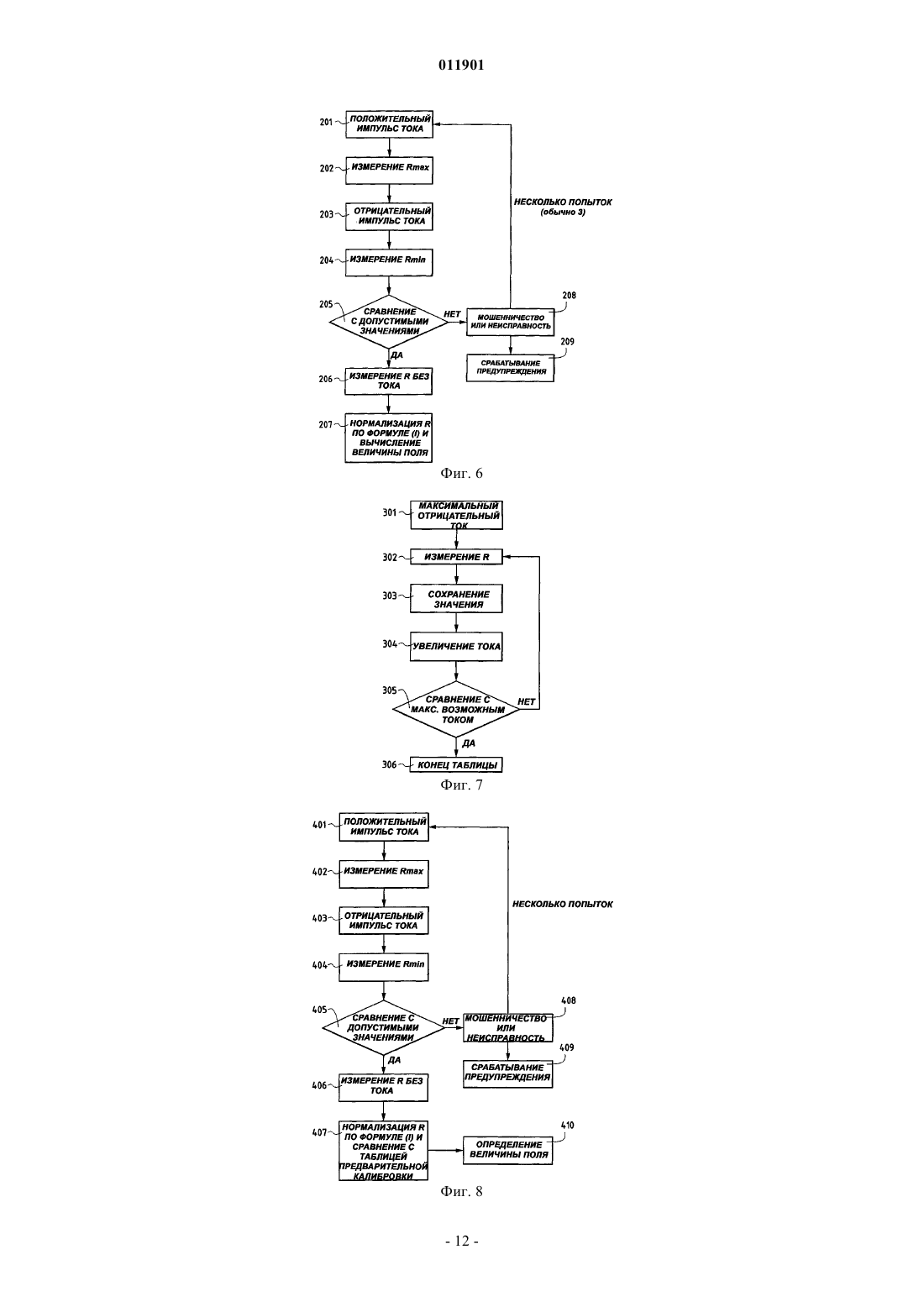
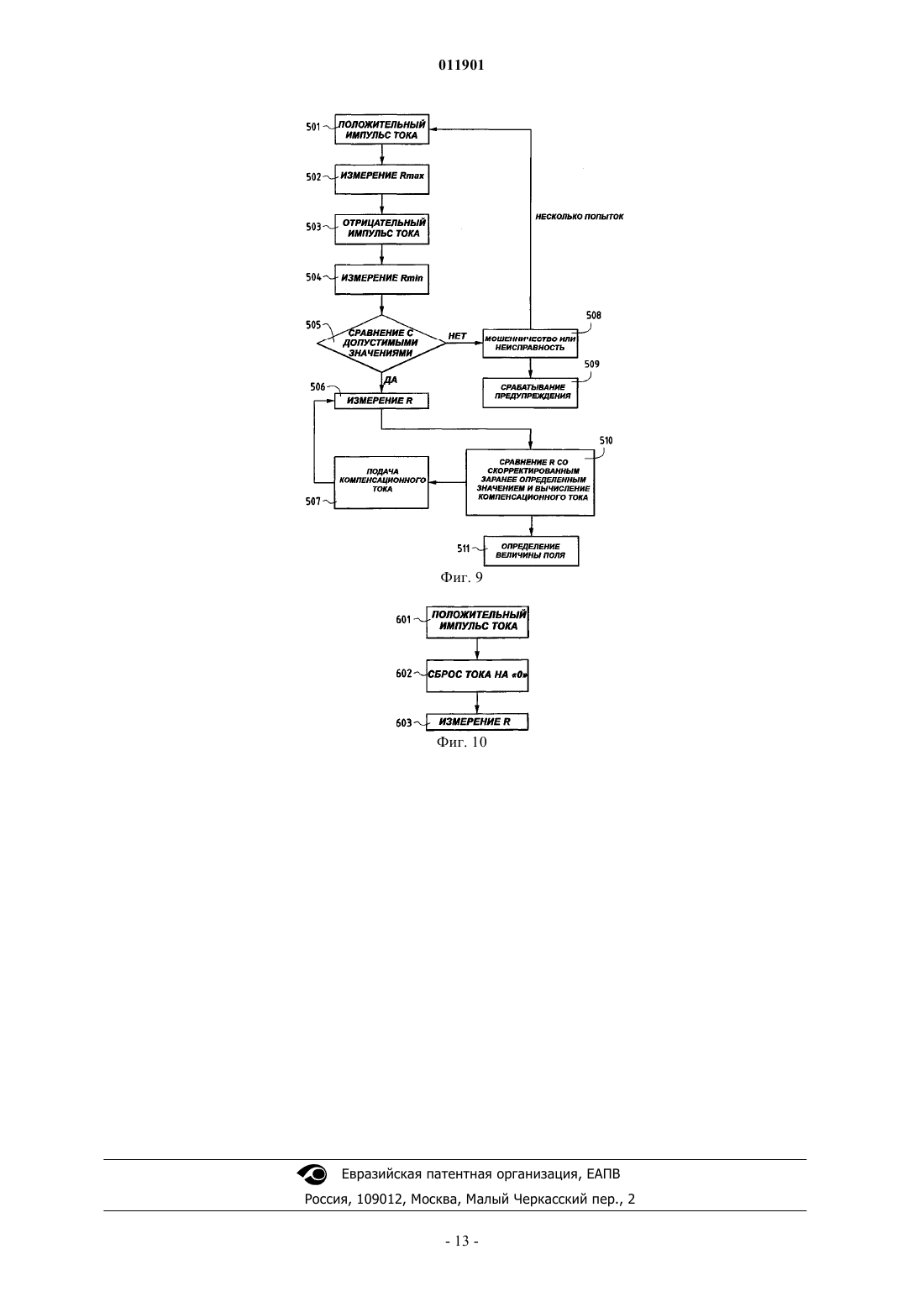
011901 Область техники, к которой относится изобретение Настоящее изобретение относится к способу и устройству для измерения внешнего магнитного поля при помощи магниторезистивного датчика. Предшествующий уровень техники В настоящее время известны различные типы магниторезистивных датчиков, содержащих магнитное сопротивление, основанное на спиновых электронных эффектах. В любом случае электрическое сопротивление материала, образующего магнитное сопротивление, изменяется в присутствии магнитного поля. В число известных типов магнитных сопротивлений, в частности, входят анизотропное магнитное сопротивление (AMR), гигантское магнитное сопротивление (GMR), туннельное магнитное сопротивление (TMR) и колоссальное магнитное сопротивление (CMR). В настоящее время эффект гигантского магнитного сопротивления в основном используют в считывающих головках. Туннельные магнитные сопротивления, разработанные недавно, предназначены, в частности, для использования в качестве конструктивных модулей магнитных систем памяти со случайным доступом(MRAM). Магниторезистивные датчики можно использовать, в частности, для измерения магнитных полей,создаваемых постоянными магнитами, например, в приложениях, связанных с магнитным кодированием. Магниторезистивные датчики также можно использовать для измерения слабых магнитных полей, например магнитного поля Земли, или для измерения магнитных полей, создаваемых токами, по которым можно определить значение силы тока. Однако достоверность и точность измерений, проводимых с использованием магниторезистивных элементов, снижают отклонения, вызванные изменениями температуры (такие отклонения обратимы) или другими причинами, например старением или облучением (причем такие отклонения могут быть необратимыми). Кроме того, характеристики магниторезистивных элементов могут различаться в связи с их изготовлением. Магниторезистивный элемент типа GMR, TMR или CMR обладает сопротивлением R, которое может варьироваться в зависимости от приложенного магнитного поля от 5 до 10% R в случае GMR, от 25 до 50% R в случае TMR и до нескольких сотен процентов в случае CMR. Сопротивление магниторезистивных элементов типа GMR, TMR или CMR подвержено термальному сдвигу, который может быть до определенной степени скомпенсирован при помощи мостовой схемы,содержащей два или более подобных элементов. Тем не менее, коэффициент чувствительности к величине магнитного поля таких элементов также подвержен сдвигу, вызванному конечным значением температуры Кюри магнитных материалов, используемых в таких элементах. Данный сдвиг не может быть скомпенсирован простым использованием схем,содержащих несколько таких элементов. Известны решения, в соответствии с которыми датчик всегда работает в одной и той же точке благодаря использованию отрицательной обратной связи, которая позволяет скомпенсировать вышеупомянутый эффект смещения коэффициента чувствительности к магнитному полю. Однако данная технология сама по себе не устраняет всех недостатков и связана с высоким потреблением энергии на обеспечение электропитания системы отрицательной обратной связи. Также известны решения, в которых смещение коэффициента чувствительности компенсируют при помощи электронной схемы, содержащей температурно-зависимый элемент. Осуществление такой технологии затруднено в связи с непостоянством чувствительности датчиков, связанной с их изготовлением. Она требует проведения калибровки в нескольких точках температурной зависимости. Даже в случаях, когда смещение чувствительности можно считать малым, возможны обстоятельства, в которых, например, возникает гистерезис магнитного сопротивления, который может снижать качество проводимых измерений. Сущность изобретения Задача, на решение которой направлено настоящее изобретение, заключается в устранении указанных недостатков и обеспечении возможности проведения более точных и достоверных измерений величины магнитного поля при помощи магниторезистивных датчиков. В частности, изобретение направлено на обеспечение систематической и точной коррекции любых смещений чувствительности датчиков магниторезистивного типа. Кроме того, изобретение направлено на создание простого способа внесения поправок, устраняющих зависимость измерений от предыдущей истории работы магниторезистивного элемента, и, следовательно, устраняющих недостатки, связанные с какими бы то ни было гистерезисными явлениями. Устройство и способ по изобретению также должны быть совместимы с известными технологиями,например, обработки сигналов и использования мостовых схем. Для решения поставленных задач в соответствии с изобретением предлагается способ измерения величины внешнего магнитного поля с использованием магниторезистивного датчика, отличающийся тем, что включает первый этап, на котором перед каждым измерением величины внешнего магнитного-1 011901 поля к пространству, содержащему магниторезистивный датчик, прилагают по меньшей мере один импульс дополнительного магнитного поля, причем первый импульс дополнительного магнитного поля имеет первое значение первой положительной или отрицательной полярности и амплитуды, достаточной для насыщения датчика, и второй этап, на котором прилагают указанное дополнительное магнитное поле заранее определенной величины, которая не приводит к насыщению датчика, и определяют величину внешнего магнитного поля путем измерения сопротивления магниторезистивного датчика. Указанная заранее определенная величина предпочтительно равна нулю. Вышеописанный способ, в частности, позволяет устранить все недостатки, связанные с гистерезисными явлениями в магниторезистивных датчиках. Для систематической и точной корректировки любых смещений чувствительности датчика способ,в частности, отличается тем, что первый этап, осуществляемый перед каждым измерением внешнего магнитного поля, включает первый подэтап, на котором прилагают первый импульс дополнительного магнитного поля, имеющий первое значение положительной полярности и амплитуды, достаточной для насыщения датчика, и измеряют максимальное значение Rmax сопротивления датчика при верхнем насыщении, и второй подэтап, на котором прилагают второй импульс дополнительного магнитного поля,имеющий второе значение отрицательной полярности и амплитуды, достаточной для насыщения датчика, и измеряют минимальное значение Rmin сопротивления датчика при нижнем насыщении, причем на втором этапе прилагают указанное дополнительное магнитное поле заранее определенной величины,которая не приводит к насыщению датчика, и измеряют эффективное сопротивление Reff магниторезистивного датчика, причем измерения эффективного сопротивления Reff автоматически калибруют с использованием ранее измеренных максимального Rmax и минимального Rmin значений сопротивления датчика при верхнем и нижнем насыщении для определения скорректированного значения Rcor сопротивления, по которому определяют величину внешнего магнитного поля. Первый подэтап может осуществляться хронологически раньше или позже второго подэтапа. Заранее определенная величина дополнительного магнитного поля, не вызывающая насыщения датчика, предпочтительно равна нулю. В соответствии с одним из вариантов осуществления изобретения скорректированное значение Rcor сопротивления получают по следующей формуле: где Rref max и Rref min - максимальное эталонное сопротивление при верхнем насыщении при данной температуре, выбранной для калибровки датчика, и минимальное эталонное сопротивление при нижнем насыщении при указанной температуре соответственно. Импульс дополнительного магнитного поля может быть создан при помощи катушки индуктивности, расположенной вблизи магниторезистивного датчика. В соответствии с другим возможным вариантом осуществления импульс дополнительного магнитного поля может быть создан при помощи токового слоя, в который подают ток, расположенного вблизи магниторезистивного датчика. В соответствии с одним из вариантов осуществления изобретения способ дополнительно включает в себя этап предварительной калибровки, на котором калибровочные значения записывают в калибровочную таблицу, причем на втором этапе скорректированное значение Rcor сопротивления определяют путем сравнения фактически измеренного эффективного Reff сопротивления с калибровочными значениями, сохраненными в калибровочной таблице. Этап предварительной калибровки предпочтительно периодически повторяют. В соответствии с другим вариантом осуществления способа по изобретению величину внешнего магнитного поля измеряют при помощи отрицательной обратной связи, которая заключается в приложении на втором этапе такого дополнительного магнитного поля, при котором сопротивление R магниторезистивного датчика имеет промежуточное значение, находящееся между предельными значениями Rmin иRmax сопротивления магниторезистивного датчика, определенными на первом этапе. Способ по изобретению также может включать в себя этап сравнения минимального значения Rmin сопротивления при нижнем насыщении и максимального значения Rmax сопротивления при верхнем насыщении магниторезистивного датчика, определенных на первом этапе, с заранее определенными допустимыми значениями, и этап выдачи предупреждающего сообщения в случае несовпадения с указанными заранее определенными допустимыми значениями. В соответствии с изобретением также предлагается устройство для измерения величины магнитного поля с использованием магниторезистивного датчика, отличающееся тем, что содержит по меньшей мере один магниторезистивный датчик, измерительные средства для измерения сопротивления указанного магниторезистивного датчика, генераторные средства для генерирования дополнительного магнитного поля в пространстве, содержащем магниторезистивный датчик, и средства управления, выполненные с возможностью, с одной стороны, избирательного управления генераторными средствами для приложения импульса дополнительного магнитного поля, имеющего первое значение первой положительной или-2 011901 отрицательной полярности и амплитуды, достаточной для насыщения магниторезистивного датчика, и, с другой стороны, с возможностью избирательного управления измерениями сопротивления магниторезистивного датчика при помощи измерительных средств. Устройство может дополнительно содержать средства хранения данных для хранения калибровочных значений сопротивления магниторезистивного датчика. Магниторезистивный датчик может содержать по меньшей мере одно магнитное сопротивление по меньшей мере одного из следующих типов: анизотропное магнитное сопротивление (AMR); гигантское магнитное сопротивление (GMR); туннельное магнитное сопротивление (TMR) и колоссальное магнитное сопротивление (CMR). Устройство может дополнительно содержать средства проверки допустимости значений импульса дополнительного магнитного поля, приложенного указанными генераторными средствами, и предупреждающие средства, управляемые указанными средствами проверки. В соответствии с одним из вариантов осуществления изобретения измерительные средства для измерения сопротивления магниторезистивного датчика содержат средства для измерения силы тока, необходимой для приведения измеренного сопротивления магниторезистивного датчика к эталонному значению Rref, находящемуся между предельными значениями Rmin и Rmax магнитного сопротивления магниторезистивного датчика, измеренными при включенных генераторных средствах для генерирования дополнительного магнитного поля, причем эталонное значение Rref представляет собой линейную комбинацию предельных значений Rmin и Rmax. В соответствии с одним из вариантов осуществления изобретения устройство содержит систему обработки, используемую перед каждым измерением внешнего магнитного поля, причем указанная система обработки содержит генераторные средства для приложения первого импульса дополнительного магнитного поля, имеющего первое значение положительной полярности и амплитуды, достаточной для насыщения датчика, и измерительные средства для измерения максимального значения Rmax сопротивления датчика при верхнем насыщении, генераторные средства для приложения второго импульса дополнительного магнитного поля, имеющего второе значение отрицательной полярности и амплитуды, достаточной для насыщения датчика, и измерительные средства для измерения минимального значения Rmin сопротивления датчика при нижнем насыщении, и систему обработки, содержащую средства для приложения указанного дополнительного магнитного поля заранее определенной величины, не вызывающего насыщения датчика, измерительные средства для измерения эффективного сопротивления Reff магниторезистивного датчика и калибровочные средства для автоматической калибровки измерений эффективного сопротивления Reff с использованием ранее определенных максимального значения Rmax сопротивления при верхнем насыщении и минимального значения Rmin сопротивления при нижнем насыщении для определения скорректированного значения Rcor сопротивления, по которому определяют величину магнитного поля. Краткое описание чертежей Другие свойства и достоинства настоящего изобретения станут ясны из нижеследующего описания,содержащего ссылки на прилагаемые чертежи, которые иллюстрируют частные примеры осуществления изобретения. На чертежах: на фиг. 1 схематично представлен вид в разрезе, иллюстрирующий составные элементы примера магниторезистивного датчика типа GMR; на фиг. 2 представлен график, иллюстрирующий пример типичной кривой чувствительности датчика типа GMR по фиг. 1; на фиг. 3 представлена схема первого возможного варианта осуществления измерительной системы для измерения величины магнитного поля по изобретению, в которой использована катушка индуктивности; на фиг. 4 представлена схема второго возможного варианта осуществления измерительной системы для измерения величины магнитного поля по изобретению, в которой использован встроенный магниторезистивный датчик; на фиг. 5 представлена блок-схема примера процесса калибровки, который может быть осуществлен в рамках способа по настоящему изобретению; на фиг. 6 представлена блок-схема, иллюстрирующая пример процедуры измерений, позволяющей определить величину магнитного поля в соответствии с одним из вариантов осуществления изобретения без использования калибровочной таблицы; на фиг. 7 представлена блок-схема, иллюстрирующая определение калибровочной таблицы в соответствии с одним из вариантов осуществления способа по изобретению; на фиг. 8 представлена блок-схема, иллюстрирующая пример процедуры измерений, позволяющей определить величину магнитного поля в соответствии с одним из вариантов осуществления изобретения с использованием калибровочной таблицы; на фиг. 9 представлена блок-схема, иллюстрирующая другой пример осуществления способа по изобретению, в котором использована отрицательная обратная связь; на фиг. 10 представлена блок-схема, иллюстрирующая этапы, используемые в осуществлении спо-3 011901 соба по изобретению, позволяющие не учитывать историю работы используемого магниторезистивного датчика. Осуществление изобретения Способ и устройство по изобретению предполагают применение магниторезистивных датчиков, в частности, с использованием анизотропного магнитного сопротивления (AMR), гигантского магнитного сопротивления (GMR), туннельного магнитного сопротивления (TMR) или колоссального магнитного сопротивления (CMR). Изобретение особенно хорошо применимо в случае использования гигантского магнитного сопротивления с резистивными элементами типа спинового клапана. Фиг. 1 иллюстрирует пример магниторезистивного датчика 10 типа GMR, имеющего структуру спинового клапана. Спиновый клапан обычно содержит жесткий, или заблокированный, слой 22, обладающий слабой чувствительностью к внешнему магнитному полю, и мягкий, или свободный, слой 21, обладающий высокой чувствительностью к магнитному полю. Жесткий слой 22 может быть изготовлен из набора ферромагнитных слоев с высокой коэрцитивностью или из смеси антиферромагнитных слоев, которые могут быть изготовлены искусственно, соединенных с ферромагнитным слоем. Мягкий слой изготовлен из крайне мягких магнитных материалов. Магниторезистивный датчик 10 по фиг. 1 может содержать, считая от его свободной поверхности,защитный слой 11, изготовленный из тантала, и мягкий магнитный слой 21, содержащий слой 12 из сплава NiFe и слой 13 из сплава CoFe. Мягкий слой 21 ориентируют в направлении внешнего магнитного поля. Жесткий магнитный слой 22 отделен от мягкого магнитного слоя 21 разделительным слоем 14, изготовленным из меди. Считая от разделительного слоя 14, жесткий магнитный слой 22 может содержать слой 15, изготовленный из сплава CoFe, и слой 16, изготовленный из сплава IrMn. Направление намагничивания жесткого слоя 22 установлено в процессе изготовления. Танталовый слой 17 может быть использован в качестве заготовки для наращивания верхних слоев, добавляемых для осуществления схемы. На фиг. 2 представлена характерная кривая чувствительности датчика типа GMR, которая имеет форму зависимости измерения сопротивления в зависимости от величины магнитного поля, характерную для магниторезистивных элементов. Такая кривая, подобная представленной на фиг. 2, содержит отрицательный уровень a1 насыщения,постепенное снятие насыщения (десатурацию), которое приводит к нелинейному увеличению сопротивления (участок а 2), следующий затем участок квазилинейного роста (участок c1), за которым следует еще один нелинейный участок (участок b2), после чего кривая выходит на верхний уровень насыщения(участок b1). В результате разного рода смещений изменяются три величины: сопротивление нижнего уровня a1 насыщения, наклон квазилинейного участка c1, который соответствует чувствительности, и сопротивление верхнего уровня b1 насыщения. При воздействии на датчик типа GMR магнитного поля Н изменение его сопротивления R=f(H) обычно происходит в соответствии с кривой, представленной на фиг. 2. Сопротивление изменяется от нижнего уровня Rmin насыщения, который соответствует параллельному намагничиванию слоев 21 и 22,до верхнего уровня Rmax насыщения, соответствующего встречно-параллельному намагничиванию этих двух слоев. Одна из особенностей данного датчика заключается в пропорциональном изменении его чувствительности в зависимости от температуры. Авторы изобретения обнаружили, что в широком температурном диапазоне, приблизительно от-200 до +200 С, все кривые R=f(H) воспроизводимы, а значения минимального и максимального сопротивления нормализованы. Как видно из фиг. 2, это означает, что ширину рабочей области С можно считать постоянной, и что чувствительность зависит только от разницы между нижним (минимальным) уровнем Rmin насыщения,достигаемым в области А измерений, и верхним (максимальным) уровнем Rmax насыщения, достигаемым в области В измерений. Способ по изобретению использует это свойство для автоматической калибровки измерений величины магнитного поля на основе предельных значений Rmin и Rmax. В этом случае измерение внешнего поля, по существу, включает в себя три независимых измерения: измерение минимального сопротивления (Rmin), измерение максимального сопротивления (Rmax) и измерение эффективного сопротивления (Reff). Измерения максимального и минимального сопротивления производят путем приложения к GMR положительных и отрицательных импульсов магнитного поля. Такие импульсы должны быть достаточно интенсивными для обеспечения насыщения датчика. Максимальное и минимальное значения сопротивления могут быть измерены в любом хронологическом порядке. Однако если используемый материал обладает гистерезисом, при осуществлении измерений необходимо знать его непосредственно предшествующее состояние.-4 011901 Рабочую область С исходно выбирают так, чтобы датчик обладал в данной области достаточной чувствительностью, т.е. так, чтобы чувствительность составляла не менее х% от максимальной чувствительности датчика. Величина х% предпочтительно может составлять около 70%. Если обозначить ширину рабочей области С по оси величины магнитного поля как dHc, то области насыщения для каждого типа компонентов определяют следующим образом: области А и В определяют в соответствии с требуемой точностью измерений в соответствии с определениями, приведенными ниже. Верхняя точка измерений (область B) соответствует магнитному полю, при котором измеренное значение сопротивления находится в следующем диапазоне: а значение нижней точки измерений (область А) соответствует магнитному полю, при котором измеренное значение сопротивления находится в следующем диапазоне: Величина u задает требуемую точность измерений; при u, приблизительно равном 0,01, точность измерений составляет 1%. Разница между областями А и С или между областями В и С должна быть достаточной, чтобы исключить перекрывание при приложении магнитного поля в рабочей области, вследствие чего разница величин магнитного поля между областями А и С или между областями В и С должна составлять не менее dHc/2. Скорректированное значение Rcor сопротивления для компенсации эффектов смещения значений получают по следующей формуле: где Rref max и Rref min - значения, полученные при заданной температуре, выбранной для калибровки датчика. Начиная со значения Rcor, величину внешнего магнитного поля можно определять, используя известные формулы. На фиг. 3 представлен первый вариант осуществления устройства по изобретению. Магниторезистивный датчик 5, выполненный в виде бруска, соединен соединительными элементами 1 и 2, расположенными на его концах, с элементом 50 для измерения сопротивления датчика 5. Магниторезистивный датчик помещен в катушку 6 индуктивности, концы 3 и 4 которой подключены к генератору 40 тока, способному вырабатывать импульсы с различной силой тока. Катушка 6 индуктивности, соединенная с генератором 40 тока, образует генератор импульсов дополнительного магнитного поля, который используют для выборочного приложения к магниторезистивному датчику 5 магнитного поля, величина которого пропорциональна силе тока, протекающего через катушку 6. Коэффициент пропорциональности зависит от геометрии катушки 6 и может быть вычислен по известным формулам,используемым в области электромагнетизма. Генератор 40 тока и элемент 50 измерения сопротивления магниторезистивного датчика 5 соединены со схемой 60 управления и обработки, которая может быть соединена со схемой 70 памяти и с системой 80 вывода. Схему 60 управления и обработки используют для выборочного управления генератором 40 тока, в частности, для измерения определенных выше предельных значений Rmax и Rmin сопротивления. Схему 60 управления и обработки также используют для выборочного управления элементом 50 измерения сопротивления с целью измерения значений Rmax и Rmin сопротивления при работающем генераторе 40 тока и с целью измерения значения R сопротивления в рабочей области при неработающем генераторе 40 тока. На этапе предварительной калибровки также можно построить и сохранить в памяти 70 кривую зависимости сопротивления магниторезистивного датчика 5 от величины магнитного поля при заданной температуре. Значения магнитного сопротивления датчика 5 могут быть получены при разных величинах магнитного поля в пределах диапазона измерений при помощи генератора 40 тока, который также используют для создания при помощи катушки 6 положительных и отрицательных импульсов магнитного поля при измерении верхнего и нижнего уровней насыщения. В процессе измерения кривой зависимости сопротивления датчика 5 генератор 40 тока используют только для пропускания токов заранее заданной силы через катушку 6 индуктивности. Этап предварительной калибровки может впоследствии регулярно повторяться для учета старения датчика 5. Магниторезистивный датчик 5 может при необходимости быть изготовлен из нескольких элементов, соединенных по мостовой или полумостовой схеме, без изменения сущности способа измерений. На фиг. 4 представлен другой вариант осуществления, в котором магниторезистивный датчик 32 выполнен встроенным и имеет форму почти замкнутой буквы С. Проводящие дорожки 31 используют для подачи тока, а проводящие дорожки 34 - для измерения напряжения и, следовательно, сопротивления магниторезистивного датчика 32 при помощи элемента измерениясопротивления, например, аналогич-5 011901 ного элементу 50 по фиг. 3. Металлическая полоска 33, изготовленная, например, из сплава Ti/Au или из меди, образует токовый слой, нанесенный на магниторезистивный элемент 32, причем между ними предусмотрен промежуточный изолирующий слой (не представлен на фиг. 4). На фиг. 4 изображен токовый слой 33, встроенный непосредственно в подложку 35 датчика 32. Однако токовый слой 33 также может быть независимым от датчика 32 и может быть расположен вблизи его. Токовый слой 33 соединен с генератором тока,например, аналогичным генератору 40 по фиг. 3. Элементы 60, 70 и 80 по фиг. 3 также присутствуют в варианте осуществления по фиг. 4, но не представлены на чертеже. В варианте осуществления по фиг. 4, аналогично варианту осуществления по фиг. 3, магнитное поле, создаваемое в датчике 32 генератором 40 тока при помощи токового слоя 33, пропорционально силе I тока, протекающего через указанный токовый слой 33. Если расстояние между магниторезистивным датчиком 32 и токовым слоем 33 обозначить как d, то создаваемое магнитное поле равно I/2d, где- коэффициент порядка единицы, вычисляемый путем интегрирования по линиям тока. Таким образом, если расстояние d составляет 100 нанометров (нм), а ширина w датчика составляет 5 микрометров (микрон, мкм), то для создания магнитного поля величиной 5 миллитесла (мТ), требуемого для насыщения магнитного сопротивления, необходимо пропустить ток силой 50 миллиампер (мА). Толщина токового слоя 33 является фактором второго порядка и может лежать в диапазоне от 50 нм до нескольких микрометров. Вышеописанный проводящий слой 33, в который подают ток, расположен над или под встроенным магниторезистивным датчиком 32, причем между ними расположен промежуточный слой изолирующего материала. В соответствии с одним из вариантов осуществления проводящий слой 33, в который подают ток, может быть расположен с противоположной стороны подложки 35, на которой установлен магниторезистивный датчик 32. На фиг. 5 представлена схема процедуры калибровки, позволяющей определить значения Rref max иRref min, соответствующие одной и той же, но не обязательно известной температуре. Данные значения используют в приведенном выше уравнении (I) для вычисления скорректированного значения Rcor, из которого устранены эффекты, связанные со смещением значений. Этап 101 соответствует посылке положительного импульса тока от генератора 40 тока через катушку 6 (фиг. 3) или токовый слой 33 (фиг. 4). Этап 102 соответствует измерению значения Rref max при помощи элемента 50 во время действия положительного импульса тока. Следующий этап 103 соответствует посылке отрицательного импульса тока от генератора 40 тока через катушку 6 (фиг. 3) или токовый слой 33 (фиг. 4). Этап 104 соответствует измерению значения Rref min при помощи элемента 50 во время действия отрицательного импульса тока. На фиг. 6 представлена схема основных этапов способа определения величины внешнего магнитного поля по изобретению, в котором прилагают импульс дополнительного магнитного поля, насыщающий пространство, в котором расположен магниторезистивный датчик, затем уменьшают величину дополнительного магнитного поля до нуля и определяют величину внешнего магнитного поля путем измерения значения сопротивления магниторезистивного датчика. В способе, представленном на фиг. 6, сравнения с калибровочной таблицей не производят. На этапе 201 положительный импульс тока от генератора 40 тока прилагают к элементу, создающему импульс дополнительного магнитного поля (катушке 6 или токовому слою 33), так, чтобы достичь насыщения магниторезистивного датчика при максимальном значении его сопротивления. На этапе 202 измеряют максимальное значение сопротивления (Rmax) датчика при помощи элемента 50 измерения сопротивления. На этапе 203 отрицательный импульс тока от генератора 40 тока прилагают к элементу, создающему импульс дополнительного магнитного поля (катушке 6 или токовому слою 33), так, чтобы достичь насыщения магниторезистивного датчика при минимальном значении его сопротивления. На этапе 204 измеряют минимальное значение сопротивления (Rmin) датчика при помощи элемента 50 измерения сопротивления. На этапе 205 производят сравнение измеренных значений с допустимыми значениями. Следует отметить, что способ по изобретению применим, только если измеряемая величина магнитного поля находится в пределах рабочего диапазона магниторезистивного датчика. Если приложенное внешнее поле достаточно велико для насыщения магнитного сопротивления,импульсы магнитного поля не позволяют измерять значения Rmin и Rmax. Поэтому способ должен включать в себя этап 205 проверки корректности измеренных значений. Например, один из возможных методов осуществления такой проверки заключается в установке минимального значения отношения (Rmax-Rmin)/(Rmax+Rmin). Другой возможный метод заключается в задании допустимых диапазонов для значений Rmin и Rmax с учетом имеющейся информации о температурном диапазоне магнитного сопротивления.-6 011901 Такие проверки позволяют обеспечить корректную работу магнитного сопротивления и исключить наличие сильных магнитных полей, которые могут быть созданы другими элементами системы в случае ее неисправности или в результате нежелательного приложения дополнительного магнитного поля. Если проверка на этапе 205 показывает, что измеренные значения Rmin и Rmax не соответствуют допустимым значениям, способ переходит к этапу 208 обнаружения злоумышленного или ложного сигнала и возвращается к началу этапа 201 для осуществления новой попытки определения значений Rmin и Rmax. Если после нескольких (обычно трех) таких попыток проверка на этапе 205 по-прежнему показывает, что измеренные значения Rmin и Rmax не соответствуют допустимым значениям, этап 208 обнаружения злоумышленного вмешательства выдает предупреждающее сообщение на этапе 209. Если проверка на этапе 205 показывает, что измеренные значения Rmin и Rmax соответствуют допустимым значениям, способ переходит к этапу 206, на котором при помощи измерительного элемента 50 измеряют эффективное значение Reff сопротивления, причем генератор 40 тока не действует и не подает ток в элемент, создающий дополнительное магнитное поле. На этапе 207 производят нормализацию ранее измеренного значения R. На этапе 207 вычисляют значение Rcor для внесения в значение сопротивления поправок на эффект смещения. Величину внешнего магнитного поля затем определяют по данному значению Rcor. Калибровка измерительного устройства по изобретению может быть осуществлена по всего двум точкам измерений, причем такую калибровку производят при первом вводе устройства, оборудованного магниторезистивным датчиком, в эксплуатацию. Однако наличие генератора дополнительного магнитного поля (генератора 40 тока и катушки 6 или токового слоя 33) позволяет при необходимости производить тонкую предварительную калибровку датчика путем составления калибровочной таблицы. Данную операцию следует проводить в отсутствие внешнего магнитного поля, при наличии только дополнительного магнитного поля, используемого для операции калибровки. Генератор 40 тока при этом используют для линейного изменения силы тока, в результате чего получают линейное изменение величины магнитного поля. Сопротивление магниторезистивного датчика измеряют при помощи измерительного элемента 50 для каждого значения силы тока и заносят в таблицу. Это позволяет получить кривую чувствительности магнитного сопротивления в зависимости от величины магнитного поля. При измерении внешнего магнитного поля построенную по таблице кривую значений R сопротивления в зависимости от величины магнитного поля используют в качестве эталонной кривой после аффинной корректировки на температурные изменения. Термин аффинная корректировка означает, что эффективные значения R сопротивления взвешивают с коэффициентом чувствительности, зависящим от температуры, и сдвигают в соответствии с изменениями среднего значения сопротивления. Данная операция предварительной калибровки может осуществляться автоматически и регулярно,что позволяет компенсировать эффекты старения магнитного сопротивления типа GMR. С измерениями при температуре, близкой к нормальной температуре окружающей среды, согласуется периодичность калибровки порядка одного раза в месяц. Если датчик подвергают значительным изменениям температуры, превышающим 140 С, следует предусмотреть более частое проведение калибровки. Операция предварительной калибровки служит, в частности, для внесения поправок на нелинейность функции чувствительности магнитного сопротивления. На фиг. 7 представлена схема процедуры составления калибровочной таблицы. На этапе 301 при помощи генератора 40 тока подают отрицательный ток максимальной величины. На этапе 302 при помощи измерительного элемента 50 измеряют значение R сопротивления магниторезистивного датчика при данных условиях. Затем, на этапе 303, измеренное значение сопротивления сохраняют с указанием величины приложенного тока. На этапе 304 величину тока изменяют в положительную сторону при помощи генератора 40 тока. На этапе 305 производят проверку, в результате которой определяют, равна ли величина измененного тока максимальной величине положительного тока. Если это не так, то процедура возвращается на этап 302, на котором снова производят измерение значения R сопротивления. В противном случае, т.е. при положительном результате проверки 305, процедура переходит к этапу 306, на котором завершают составление калибровочной таблицы. На фиг. 8 представлена блок-схема, иллюстрирующая определение величины внешнего магнитного поля по изобретению с использованием способа, по существу, аналогичного способу по фиг. 6, но дополнительно включающего в себя сравнение с калибровочной таблицей, составленной вышеописанным образом. Этапы 401-406, 408 и 409 блок-схемы по фиг. 8 аналогичны, соответственно, этапам 201-206, 208 и 209 блок-схемы по фиг. 6 и повторно не описываются. Однако, как показано на фиг. 8, после этапа 406, на котором значение R сопротивления измеряют в отсутствие дополнительного магнитного поля, процедура переходит к этапу 407 для определения скорректированного значения Rcor с использованием приведенного выше уравнения (I), после чего производят-7 011901 сравнение значения Rcor со значениями, записанными в таблице предварительной калибровки, для определения величины внешнего магнитного поля, которое осуществляют на этапе 410. Фиг. 9 иллюстрирует один из вариантов способа измерений по изобретению, в котором метод калибровки путем измерения предельных значений связан с измерениями величины приложенного магнитного поля при помощи отрицательной обратной связи. Этапы 501-505, 508 и 509 блок-схемы по фиг. 9 аналогичны соответственно этапам 201-205, 208 и 209 блок-схемы по фиг. 6 и повторно не описываются. В соответствии со способом по фиг. 9, после измерения предельных значений Rmax и Rmin сопротивления датчика при помощи положительного импульса магнитного поля и отрицательного импульса магнитного поля и подтверждения их допустимости на этапе 505 проверки процедура переходит к этапу 506 измерения эффективного значения сопротивления. На этапе 510 данное значение сравнивают с заранее определенным промежуточным эталонным значением, например, вычисленным по формуле Затем, на этапе 507 при помощи генератора 40 тока на элемент, прилагающий дополнительное магнитное поле (катушку 6 или токовый слой 33), подают номинальный компенсирующий ток с целью приведения измеренного значения R сопротивления к указанному заранее определенному промежуточному значению Rref. Этап 506 повторяют до тех пор, пока полученная на этапе 510 разница между измеренным значением и заранее определенным промежуточным значением не будет меньше требуемой ошибки измерений. На этапе 511, следующем после этапа 510 сравнения, определяют величину измеряемого магнитного поля. Вариант осуществления, описанный со ссылками на фиг. 9, связан с более значительным потреблением электроэнергии и большим временем реакции, но обеспечивает превосходную компенсацию температурного смещения. Фиг. 10 иллюстрирует применение способа по изобретению к магнитным сопротивлениям, обладающим гистерезисом. На первом этапе 601 при помощи генератора 40 тока прилагают импульс дополнительного магнитного поля, причем такой импульс может быть как положительным (как в приведенном примере), так и отрицательным. На этапе 602 производят обращение тока, поданного генератором 40 тока. На этапе 603 производят измерение значения R сопротивления магниторезистивного датчика при помощи измерительного элемента 50. Предварительные импульсы магнитного поля, прилагаемые на этапе 601, служат для создания истории намагничивания магнитного сопротивления до перехода к этапу 603 измерения величины внешнего магнитного поля. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ измерения величины внешнего магнитного поля с использованием магниторезистивного датчика, отличающийся тем, что включает первый этап, на котором перед каждым измерением величины внешнего магнитного поля к пространству, содержащему магниторезистивный датчик, прилагают по меньшей мере один импульс дополнительного магнитного поля, причем указанный первый этап включает два подэтапа, на одном из которых прилагают импульс дополнительного магнитного поля, имеющий первое значение положительной полярности и амплитуды, достаточной для насыщения датчика, и измеряют максимальное значение(Rmax) сопротивления датчика при верхнем насыщении, и на другом из которых прилагают импульс дополнительного магнитного поля, имеющий второе значение отрицательной полярности и амплитуды,достаточной для насыщения датчика, и измеряют минимальное значение (Rmin) сопротивления датчика при нижнем насыщении, и второй этап, на котором прилагают указанное дополнительное магнитное поле заранее определенной величины, которая не приводит к насыщению датчика, и измеряют эффективное сопротивление (Reff) магниторезистивного датчика, причем измерения эффективного сопротивления (Reff) автоматически калибруют с использованием ранее измеренных максимального и минимального значений (Rmax, Rmin) сопротивления датчика при верхнем и нижнем насыщении для определения скорректированного значения(Rcor) сопротивления, по которому определяют величину внешнего магнитного поля. 2. Способ по п.1, отличающийся тем, что на первом этапе осуществляют первым подэтап, включающий приложение дополнительного магнитного поля положительной полярности. 3. Способ по п.1, отличающийся тем, что на первом этапе осуществляют первым подэтап, включающий приложение дополнительного магнитного поля отрицательной полярности. 4. Способ по любому из пп.1-3, отличающийся тем, что указанная заранее определенная величина равна нулю. 5. Способ по п.4, отличающийся тем, что скорректированное значение (Rcor) сопротивления полу-8 011901 чают по следующей формуле: где Rref max и Rref min - максимальное эталонное сопротивление при верхнем насыщении при данной температуре, выбранной для калибровки датчика, и минимальное эталонное сопротивление при нижнем насыщении при указанной температуре соответственно. 6. Способ по любому из пп.1-5, отличающийся тем, что импульс дополнительного магнитного поля создают при помощи катушки (6) индуктивности, расположенной вблизи магниторезистивного датчика(5). 7. Способ по любому из пп.1-5, отличающийся тем, что импульс дополнительного магнитного поля создают при помощи токового слоя (33), в который подают ток и который расположен вблизи магниторезистивного датчика (32). 8. Способ по п.4, отличающийся тем, что дополнительно включает в себя этап предварительной калибровки, на котором калибровочные значения записывают в калибровочную таблицу, причем на втором этапе скорректированное значение (Rcor) сопротивления определяют путем сравнения фактически измеренного эффективного (Reff) сопротивления с калибровочными значениями, сохраненными в калибровочной таблице. 9. Способ по п.8, отличающийся тем, что этап предварительной калибровки периодически повторяют. 10. Способ по любому из пп.1-3, отличающийся тем, что величину внешнего магнитного поля измеряют при помощи отрицательной обратной связи, которая заключается в приложении на втором этапе такого дополнительного магнитного поля, при котором сопротивление (R) магниторезистивного датчика имеет промежуточное значение, находящееся между предельными значениями (Rmin) и (Rmax) сопротивления магниторезистивного датчика, определенными на первом этапе. 11. Способ по любому из пп.1-10, отличающийся тем, что дополнительно включает этап сравнения минимального значения (Rmin) сопротивления при нижнем насыщении и максимального значения (Rmax) сопротивления при верхнем насыщении магниторезистивного датчика, определенных на первом этапе, с заранее определенными допустимыми значениями, и этап выдачи предупреждающего сообщения в случае несовпадения с указанными заранее определенными допустимыми значениями. 12. Способ по любому из пп.1-11, отличающийся тем, что магниторезистивный датчик (5; 32) содержит по меньшей мере одно магнитное сопротивление по меньшей мере одно из следующих типов: анизотропное магнитное сопротивление (AMR); гигантское магнитное сопротивление (GMR); туннельное магнитное сопротивление (TMR) и колоссальное магнитное сопротивление (CMR). 13. Устройство для измерения величины магнитного поля с использованием магниторезистивного датчика, отличающееся тем, что содержит по меньшей мере один магниторезистивный датчик (10; 5; 32),измерительные средства (50) для измерения сопротивления указанного магниторезистивного датчика,генераторные средства (40, 6; 33) для генерирования дополнительного магнитного поля в пространстве,содержащем магниторезистивный датчик (10; 5; 32), и средства (60) управления, выполненные с возможностью, с одной стороны, избирательного управления генераторными средствами (40, 6; 33) для приложения импульса дополнительного магнитного поля, имеющего первое значение первой положительной или отрицательной полярности и амплитуды, достаточной для насыщения магниторезистивного датчика(10; 5; 32), и, с другой стороны, с возможностью избирательного управления указанными измерительными средствами (50) с целью измерения сопротивления магниторезистивного датчика (10; 5; 32), причем средства (60) управления обеспечивают возможность перед каждым измерением внешнего магнитного поля приложения первого импульса дополнительного магнитного поля, имеющего первое значение положительной полярности и амплитуды, достаточной для насыщения датчика (10; 5; 32), измерения максимального значения (Rmax) сопротивления датчика (10; 5; 32) при верхнем насыщении, приложения второго импульса дополнительного магнитного поля, имеющего второе значение отрицательной полярности и амплитуды, достаточной для насыщения датчика, измерения минимального значения (Rmin) сопротивления датчика (10; 5; 32) при нижнем насыщении, приложения указанного дополнительного магнитного поля заранее заданной величины, не вызывающего насыщения датчика (10; 5; 32), и измерения эффективного сопротивления (Reff) магниторезистивного датчика (10; 5; 32), при этом средства (60) управления обеспечивают возможность автоматической калибровки измерений эффективного сопротивления (Reff) с использованием ранее определенных максимального значения (Rmax) сопротивления при верхнем насыщении и минимального значения (Rmin) сопротивления при нижнем насыщении для определения скорректированного значения (Rcor) сопротивления, по которому определяют величину магнитного поля. 14. Устройство по п.13, отличающееся тем, что дополнительно содержит средства (70) хранения данных для хранения калибровочных значений сопротивления магниторезистивного датчика (10; 5; 32). 15. Устройство по п.13 или 14, отличающееся тем, что магниторезистивный датчик (5; 32) содержит по меньшей мере одно магнитное сопротивление по меньшей мере одного из следующих типов: анизотропное магнитное сопротивление (AMR), гигантское магнитное сопротивление (GMR), туннельное маг-9 011901 нитное сопротивление (TMR) и колоссальное магнитное сопротивление (CMR). 16. Устройство по любому из пп.13-15, отличающееся тем, что генераторные средства для генерирования дополнительного магнитного поля содержат катушку (6) индуктивности, расположенную вблизи магниторезистивного датчика (5). 17. Устройство по любому из пп.13-15, отличающееся тем, что генераторные средства для генерирования дополнительного магнитного поля содержат токовый слой (33), в который подают ток, расположенный вблизи магниторезистивного датчика (32). 18. Устройство по п.17, отличающееся тем, что токовый слой (33), в который подают ток, расположен над или под магниторезистивным датчиком (32), который выполнен встроенным, причем между ними предусмотрен промежуточный слой изолирующего материала. 19. Устройство по п.17, отличающееся тем, что токовый слой (33), в который подают ток, расположен на поверхности подложки (35), противоположной ее поверхности, на которой установлен магниторезистивный датчик (32). 20. Устройство по любому из пп.13-19, отличающееся тем, что дополнительно содержит средства проверки допустимости значений сопротивления, измеренных при приложении генераторными средствами (6; 33) импульса дополнительного магнитного поля, и предупреждающие средства (80), управляемые указанными средствами проверки допустимости значений. 21. Устройство по любому из пп.13-20, отличающееся тем, что измерительные средства (50) для измерения сопротивления магниторезистивного датчика (5; 32) содержат средства для измерения силы тока, необходимой для приведения измеренного сопротивления магниторезистивного датчика (5; 32) к эталонному значению (Rref), находящемуся между предельными значениями (Rmin, Rmax) магнитного сопротивления магниторезистивного датчика (5; 32), измеренными при включенных генераторных средствах (40) для генерирования дополнительного магнитного поля, причем эталонное значение (Rref) представляет собой линейную комбинацию предельных значений (Rmin, Rmax).
МПК / Метки
МПК: G01R 33/09
Метки: измерения, датчика, помощью, магнитного, способ, устройство, поля, магниторезистивного
Код ссылки
<a href="https://eas.patents.su/14-11901-sposob-i-ustrojjstvo-dlya-izmereniya-magnitnogo-polya-s-pomoshhyu-magnitorezistivnogo-datchika.html" rel="bookmark" title="База патентов Евразийского Союза">Способ и устройство для измерения магнитного поля с помощью магниторезистивного датчика</a>
Способ и устройство для получения рисунка в покрытии, содержащем частицы магнитного материала, за счет воздействия магнитного поля
Номер патента: 7971
Опубликовано: 27.02.2007
Авторы: Беннингер Натали, Десплан Клод-Ален, Мюллер Эдгар, Дего Пьер
МПК: B41M 3/14, B41M 1/42, B41C 1/04...
Метки: содержащем, счет, получения, способ, частицы, устройство, покрытии, рисунка, воздействия, поля, магнитного, материала
Формула / Реферат:
1. Устройство для переноса символов, например рисунка или изображения, на влажный состав для покрытия, например состав покрытия, включающий по меньшей мере один тип магнитных или намагничиваемых твердых частиц, за счет воздействия магнитного поля, содержащее основу из постоянно магнитного материала, который постоянно намагничен в направлении, по существу, перпендикулярном поверхности основы, отличающееся тем, что указанная поверхность основы...
Ядерный магнитный резонанс, измеряемый с помощью сверхпроводящего квантового интерференционного датчика, и формирование изображения с помощью магнитного резонанса при сверхслабых полях
Номер патента: 6832
Опубликовано: 28.04.2006
Авторы: Трабезингер Андреас Хайнц, Макдермот Роберт, Пайнес Александр, Кларк Джон
МПК: G01V 3/00
Метки: квантового, формирование, датчика, интерференционного, ядерный, помощью, сверхслабых, резонанса, измеряемый, магнитного, изображения, магнитный, резонанс, полях, сверхпроводящего
Формула / Реферат:
1. Способ исследования пробы посредством ядерного магнитного резонанса (ЯМР), включающий в себя предварительную поляризацию ядерных спинов в пробе в магнитном поле в несколько миллитесла; измерение сигналов ядерного магнитного резонанса (ЯМР) от пробы в измерительном магнитном поле в несколько микротесла с помощью ненастраиваемого магнитометра, представляющего собой сверхпроводящий квантовый интерференционный датчик (Сквид) с низкой критической...
Способ и устройство для компенсации низкочастотного магнитного поля в индуктивном сигнальном устройстве связи
Номер патента: 6417
Опубликовано: 29.12.2005
Авторы: Поведа Лерма Антонио, Бласко Кларет Хорхе Висенте
МПК: H04B 3/56, G05F 7/00, H01F 27/38...
Метки: устройство, способ, поля, сигнальном, магнитного, связи, устройстве, низкочастотного, индуктивном, компенсации
Формула / Реферат:
1. Способ компенсации низкочастотного магнитного поля в индуктивном сигнальном устройстве связи, содержащем ферромагнитный сердечник (30), расположенный вокруг проводника, по которому протекает ток (1) низкой частоты, и предназначенный для ввода в проводник сигнала высокой частоты, отличающийся тем, что для одновременного получения и ввода в сердечник компенсирующего тока используют отдельный ферромагнитный сердечник (16) и компенсирующую...
Аппарат магнитоиндукционной терапии и излучатель магнитного поля для него
Номер патента: 7347
Опубликовано: 25.08.2006
Авторы: Михневич Владимир Владимирович, Говор Геннадий Антонович
МПК: A61N 2/02
Метки: магнитного, него, магнитоиндукционной, аппарат, поля, терапии, излучатель
Формула / Реферат:
1. Аппарат магнитоиндукционной терапии, содержащий колебательный контур, включающий в себя конденсатор и излучатель униполярных импульсов магнитного поля, имеющий обмотку, блок питания, накопительный конденсатор, включенный параллельно конденсатору контура, а также первый и второй управляемые ключи и первый и второй диоды, отличающийся тем, что указанный излучатель снабжен сердечником, который выполнен из магнитно-мягкого композиционного...
Устройство для измерения вязкости текучих сред, датчик вязкости и способ изготовления электродов тахометра датчика вязкости
Номер патента: 2957
Опубликовано: 26.12.2002
Авторы: Орлов Олег Федорович, Ненашев Александр Васильевич, Берг Владимир Иванович
МПК: H01G 9/055, G01N 11/14, H02K 15/00...
Метки: измерения, датчика, изготовления, устройство, сред, тахометра, способ, текучих, электродов, вязкости, датчик
Формула / Реферат:
1. Устройство для измерения вязкости текучих сред, содержащее датчик вязкости, выполненный на базе асинхронного электродвигателя и имеющий измерительную камеру, причем выход датчика вязкости подсоединен ко входу блока формирования информационного сигнала, а измерительная камера сообщена через входной канал с насосом высокого давления, отличающееся тем, что в датчик вязкости введен тахометр, ротор которого жестко соединен с ротором асинхронного...
Предыдущий патент: Способ автоматизированного распространения рекламных сообщений и система для его реализации
Следующий патент: Осушитель для сжатого воздуха и других газообразных сред
Случайный патент: Пневматическая безмембранная система разделения клеток с переменным давлением