Платформа с автоматическим регулированием предварительного напряжения

Формула / Реферат
1. Платформа для использования в процессе сооружения мостов, виадуков и других конструкций, содержащая
основную конструкцию;
по меньшей мере один напрягаемый трос, не сцепленный с бетоном;
первое анкерное устройство для крепления одного конца напрягаемого троса, не сцепленного с бетоном, к конструкции и второе анкерное устройство для крепления противоположного конца напрягаемого троса, не сцепленного с бетоном, к конструкции;
отличающаяся тем, что она содержит по меньшей мере один блок датчиков, предназначенный для измерения физического изменения в основной конструкции, указывающие нагружение или внутренние силы основной конструкции, электронный интерфейс, преобразующий измерения в считываемые данные и передающий данные к контроллеру; исполнительный механизм, который постоянно расположен между основной конструкцией и напрягаемым тросом, не сцепленным с бетоном, предназначенный для изменения натяжения напрягаемого троса, не сцепленного с бетоном, соответственно контроллеру, так что натяжение увеличивается в ответ на увеличенные нагрузки или внутренние силы основной конструкции, либо уменьшается в ответ на уменьшенные нагрузки или внутренние силы основной конструкции.
2. Платформа по п.1, отличающаяся тем, что контроллер представляет собой, по меньшей мере, компьютер или автомат, обеспечивающий прогон, по меньшей мере, компьютерной программы или кода для обработки данных.
3. Платформа по п.1 и 2, отличающаяся тем, что компьютерная программа или код для обработки данных обеспечивают возможность считывания данных, передаваемых датчиком, и вычисления величины и/или направления силы, которая должна быть приложена исполнительным механизмом к напрягаемому тросу, не сцепленному с бетоном.
4. Платформа по п.1, отличающаяся тем, что функцию контроллера выполняет оператор, вручную управляющий переключающей панелью, подсоединенной по меньшей мере к одному исполнительному механизму.
5. Платформа по п.1, отличающаяся тем, что напрягаемый трос, не сцепленный с бетоном, выполнен внутренним или наружным по отношению к контуру основной конструкции.
6. Платформа по п.1 или 5, отличающаяся тем, что напрягаемый трос, не сцепленный с бетоном, имеет линейное или многолинейное расположение.
7. Платформа по п.1, отличающаяся тем, что натяжение напрягаемого троса, не сцепленного с бетоном, увеличивается или уменьшается посредством исполнительного механизма как результат перемещения анкерного устройства соответственно от основной конструкции и к ней.
8. Платформа по п.1, отличающаяся тем, что исполнительный механизм представляет собой по меньшей мере одну выдвигаемую стойку с первым концом, с возможностью отведения соединенным с опорой, которая удерживает напрягаемый трос, не сцепленный с бетоном, и со вторым концом, с возможностью отведения соединенным с основной конструкцией.
9. Платформа по пп.1 и 8, отличающаяся тем, что стойка или стойки, которые удерживают опоры, выполнены с возможностью отведения или перемещения посредством поступательного движения или вращения.
10. Платформа по п.1, отличающаяся тем, что датчик или каждый датчик расположен вблизи на поверхности или внутри элементов платформы, либо снаружи по отношению к основной конструкции.
11. Платформа по п.1 или 10, отличающаяся тем, что датчик представляет собой экстензометр, датчик давления, измерительный преобразователь линейных перемещений, лазерный датчик, гальванический элемент, уклономер, пьезометрический датчик или подобное устройство.
12. Платформа по любому из предшествующих пунктов, отличающаяся тем, что данные, измеренные датчиком или каждым датчиком и используемые для вычисления величины и/или направления сил, которые должны быть приложены исполнительным механизмом, представляют собой, по меньшей мере, давления, отклонения, повороты, деформации, напряжения или уровни нагрузок.
13. Платформа по любому из предшествующих пунктов, отличающаяся тем, что передачу считываемых данных между датчиком и контроллером и передачу обработанных данных между контроллером и исполнительным механизмом или каждым исполнительным механизмом осуществляют посредством электронной цепи, оптико-волоконного сообщения, радиочастот, инфракрасного излучения, технологии WI-FI или Blue ToothT.
14. Платформа по п.1, отличающаяся тем, что она выполнена с возможностью обеспечения опоры для опалубки по месту отливки конструкций либо для предварительно отливаемых сегментов, предварительно отливаемых мостовых ферм или даже для других конструктивных элементов.
15. Способ обеспечения имевшейся ранее платформы системой саморегулирования предварительного напряжения, отличающийся тем, что имевшуюся ранее платформу оснащают элементами по п.1.

Текст
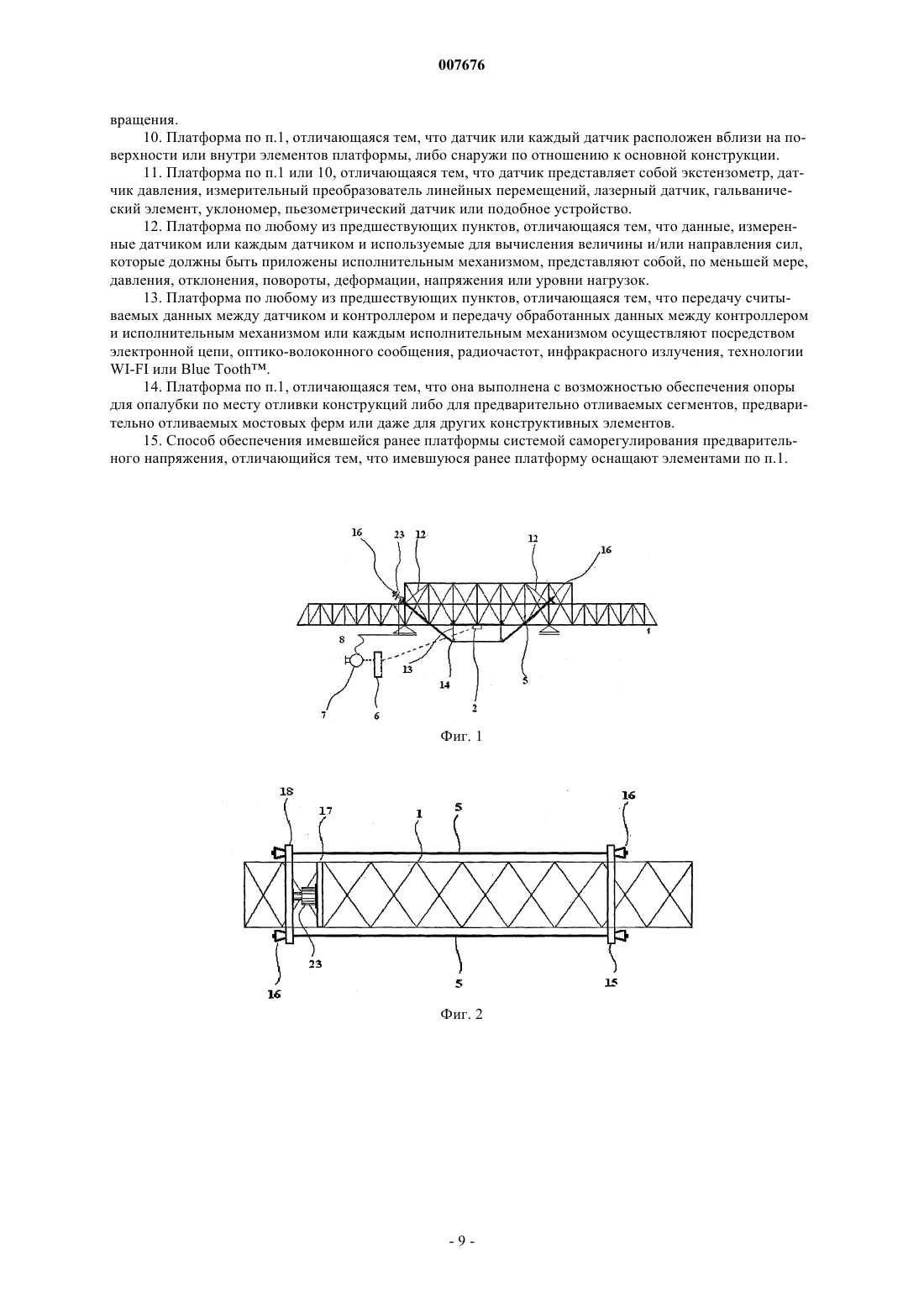
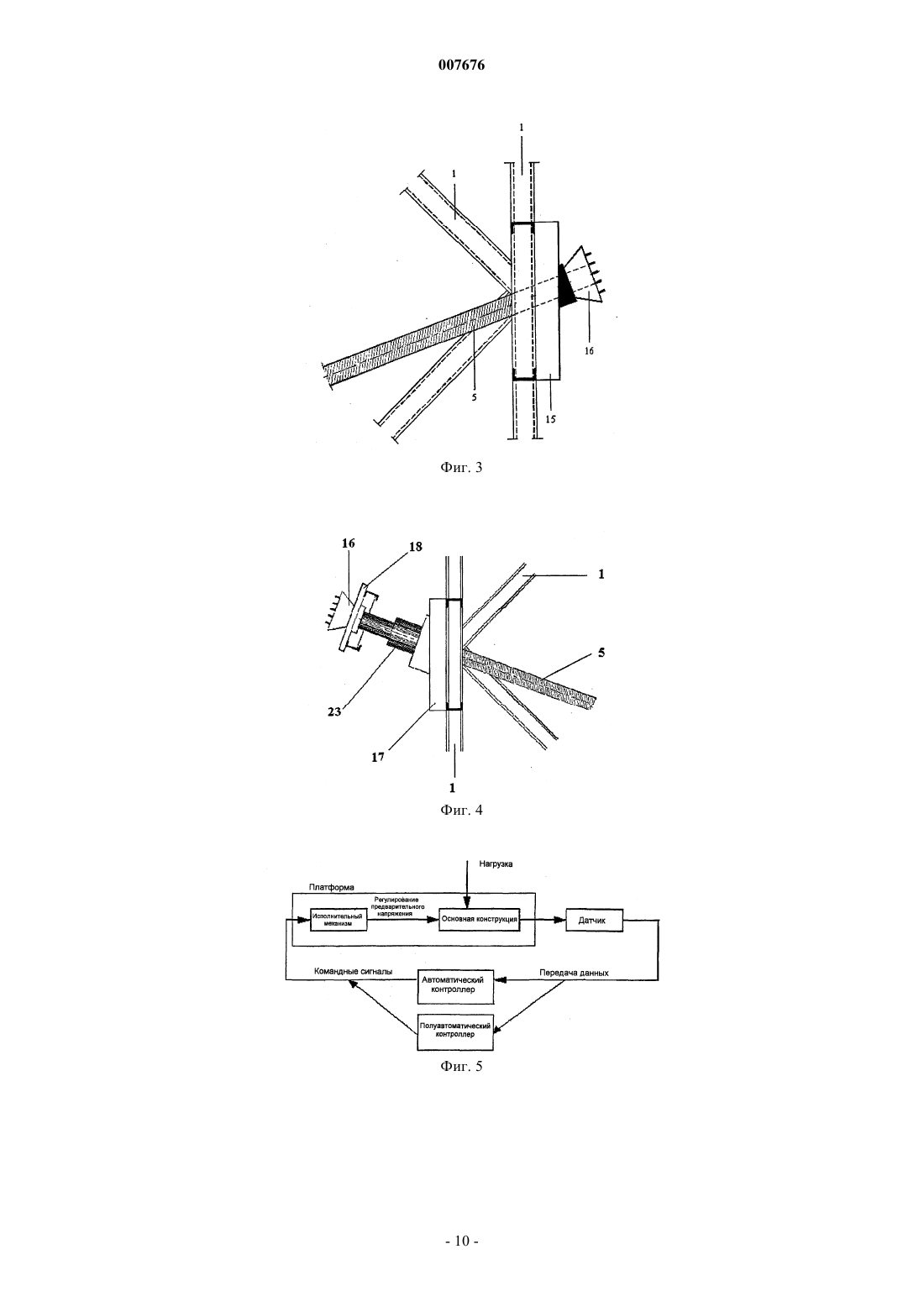
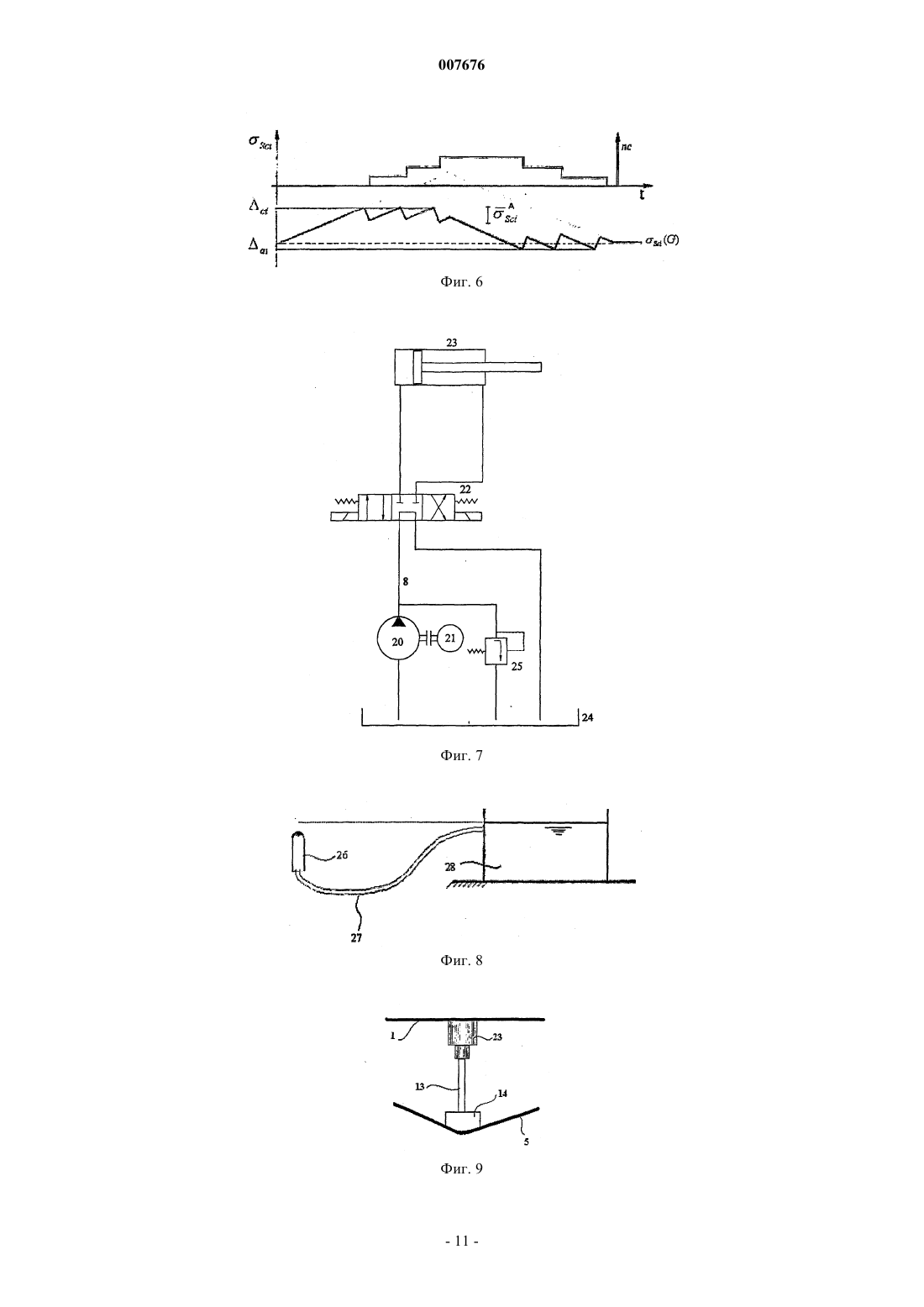
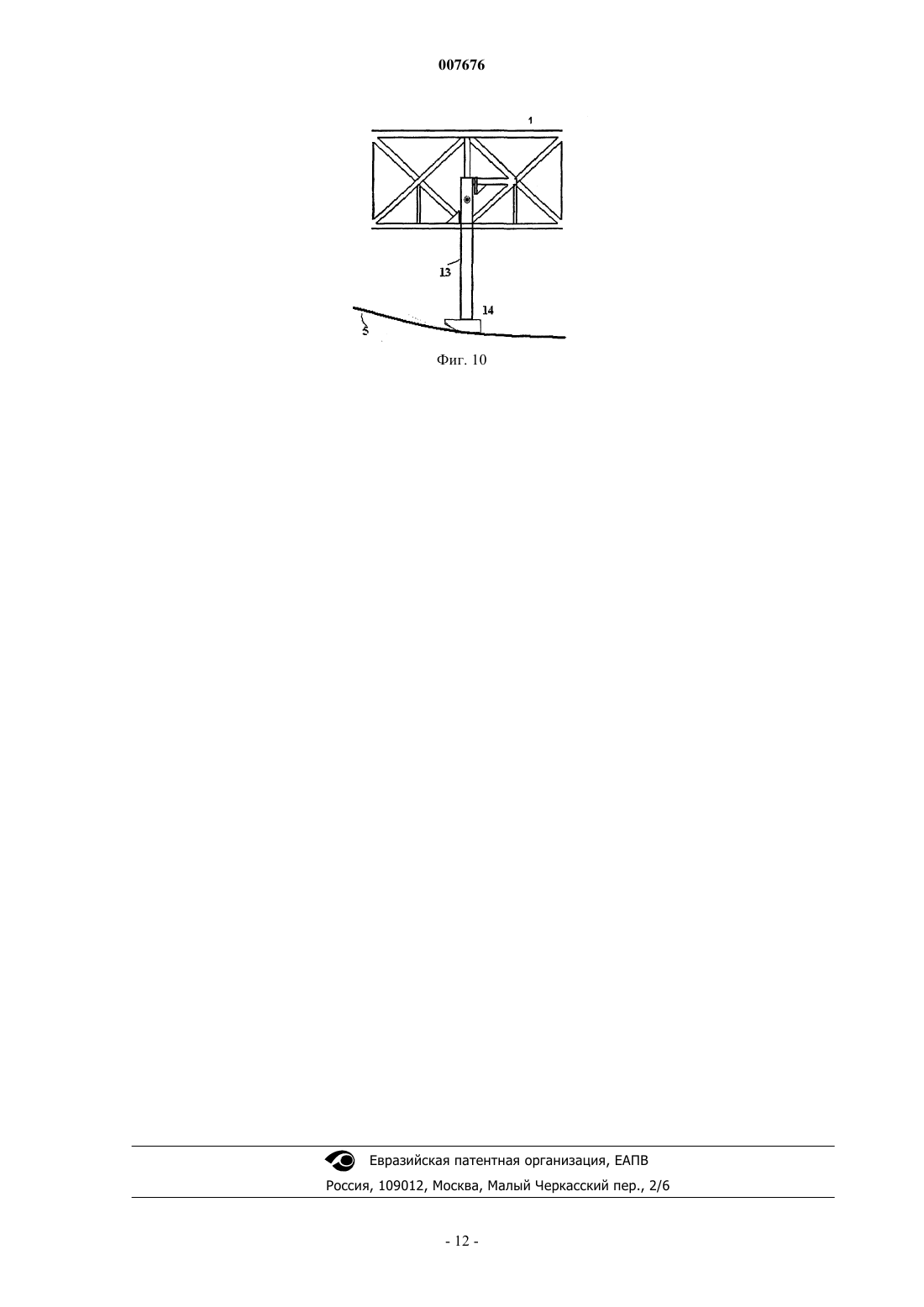
007676 Настоящее изобретение относится к платформе для использования при строительстве, а точнее к платформе, оснащенной системой, которая автоматически регулирует ее предварительное напряжение. В современном гражданском строительстве использование платформ (с верхним подвешиванием и с нижним подвешиванием) при возведении мостов и виадуков в значительной степени опережает использование строительных лесов, опирающихся на грунт. Однако обстоятельство, которое препятствует их более распространенному использованию, заключается в том, что они требуют больших капитальных вложений, касающихся материалов и затрат труда на их сооружение. Хотя имеющиеся платформы могут быть использованы повторно, в отношении них также весьма обычным является требование повторного приспосабливания, в частности, когда согласно проекту требуется, чтобы они выдерживали более высокую нагрузку, чем та, для которой они были предназначены первоначально. Такое приспосабливание само по себе представляет собой процесс, который требует весьма значительных затрат времени и средств, и который обычно задерживает темпы ведения строительства. Использование известных платформ также заключает в себе серьезную опасность. Это объясняется тем, что они представляют собой конструкции, которые предназначены для удерживания многих постоянных и переменных нагрузок, что может привести к большому числу деформаций и напряжений, которые ослабляют конструкцию и в итоге могут вызвать ее обрушение. В прошлом происходили несчастные случаи. Ранее для усиления и упрочнения бетонных балочных ферм использовали тросы или элементы предварительно напрягаемой арматуры, что описано в заявках на патент WO 00/68508 (Interconstec Co.Ltd), WO 02/28168 (Interconstec Co. Ltd) и WO 01/27406. Однако эти конструкции требуют внедрения наружных инструментов для увеличения или уменьшения натяжения тросов. Кроме того, в ответ на нагрузки, прилагаемые к конструкции в какое-либо заданное время, регулирование не выполнялось, а было включено в стратегию периодического технического обслуживания платформ. Основная задача настоящего изобретения заключается в создании платформы с автоматической или полуавтоматической системой для регулирования предварительного напряжения конструкции платформы согласно внешним воздействиям, прилагаемым к ней, когда происходит нагружение. Еще одна задача настоящего изобретения заключается в создании платформы, более эффективной в отношении конструкции, чем известные платформы, а точнее в создании платформы, которая имеет систему, способную противодействовать деформациям и напряжениям конструкции платформы сразу же после их обнаружения, обеспечивая таким образом компенсацию, которая гарантирует требуемые эксплуатационные характеристики. Еще одна задача настоящего изобретения заключается в создании платформы, которая может удерживать более высокую нагрузку, чем известная платформа, имеющая эквивалентные размер и массу конструкции. Наконец, дополнительная задача настоящего изобретения заключается в создании системы, которая может быть использована для усиления объектов в виде старых и новых платформ для надвижки пролетных строений. Согласно широкому аспекту настоящего изобретения предложения платформа для использования в процессе сооружения мостов, виадуков и других конструкций, при этом платформа содержит: основную конструкцию, несущую нагрузку; по меньшей мере один напрягаемый трос, не сцепленный с бетоном; первое анкерное устройство для крепления одного конца напрягаемого троса, не сцепленного с бетоном,к конструкции, и второе анкерное устройство для крепления противоположного конца напрягаемого троса, не сцепленного с бетоном, к конструкции; отличающаяся тем, что имеется по меньшей мере один датчик, предназначенный для измерения физического изменения основной конструкции, электронный интерфейс, преобразующий измерения в считываемые данные и передающий эти данные к контроллеру; при этом контроллер выполнен с возможностью приведения в действие исполнительного механизма,который расположен между конструкцией и напрягаемым тросом, не сцепленным с бетоном, и который может увеличить или уменьшить натяжение троса в соответствии с полученными измерениями. Напрягаемый трос, не сцепленный с бетоном, может быть внутренним или наружным по отношению к контуру основной конструкции и может допускать его линейное или нелинейное расположение. В том случае, если используют более одного троса, может иметь место комбинация из внутренних и наружных тросов, концы которых крепят по отдельности посредством определенных анкерных устройств,причем эти анкерные устройства соединены с конструктивными элементами, которые могут крепить более одного анкерного устройства. Такие конструктивные элементы обычно представляют собой упрочненные плиты. Ограничительное условие, в общем, заключается лишь в том, чтобы расположение тросов не входило в противоречие ни с конструкцией, ни с процессом ведения строительства. Как упомянуто выше, основную конструкцию контролируют посредством по меньшей мере одного датчика, расположенного вблизи, на поверхности, либо внутри элемента платформы, или он даже может находиться снаружи основной конструкции. В общем, место расположения датчика или датчиков не имеет важного значения при условии, что они могут точно измерять какие-либо заданные физические изменения на основной конструкции при ее использовании. Измерения, которые могут быть использованы для вычисления величины и/или направления силы,-1 007676 прилагаемой посредством исполнительного механизма, могут, например, представлять собой измерения смещений, поворотов, деформаций, уровней нагружения, напряжений, удлинений или давлений. Платформу также предпочтительно оснащают одним или более вспомогательными датчиками для измерения температур и в итоге для измерения скоростей и ускорений. Получить правильные результаты позволяют многие типы датчиков, при этом датчик или датчики могут представлять собой, например, преобразователь давления, экстензометр, измерительный преобразователь линейных перемещений, лазерный датчик или гальванический элемент. Датчик может быть соединен с контроллером непосредственным образом или через цепь интерфейса, которая может включать в себя усилитель, фильтрующее или преобразующее устройства. Предпочтительно, чтобы некоторые преобразователи были использованы со стандартными выходами (например, 4-20 мА), не требуя при этом дополнительных элементов интерфейса. Передача данных или сигналов в настоящем изобретении может быть обеспечена либо посредством физического соединения, либо посредством беспроволочной технологии, а точнее посредством электрической проводки, оптико-волоконного сообщения, радиочастот, инфракрасного излучения, технологииWi-Fi или Bluetooth. В случае беспроволочной технологии, используемой для передачи данных или сигналов между датчиком (датчиками) и контроллером, и между контроллером и исполнительным механизмом (исполнительными механизмами), необходимо обеспечить эти элементы соответствующими устройствами для передачи и приема данных. Контроллер согласно настоящему изобретению содержит по меньшей мере один компьютер или автомат, способный обеспечивать прогон, по меньшей мере, программного средства или кода для обработки данных. Программное средство или код для обработки данных могут получать данные от датчика или от каждого датчика, обрабатывать данные, полученные от датчика или от каждого датчика, и передавать обработанные данные в виде командных сигналов по меньшей мере к одному исполнительному механизму. Такие командные сигналы обеспечивают приведение в действие исполнительного механизма или исполнительных механизмов, а это ведет к тому, что они обеспечивают точное увеличение или уменьшение натяжения напрягаемого троса, не сцепленного с бетоном. Предпочтительно, чтобы установленные в контроллере программное средство или код для обработки данных содержали по меньшей мере три подпрограммы, а именно, программу испытаний, программу нагружения и программу разгрузки. Программа испытаний включает в себя базовый алгоритм, используемый для непосредственного содействия растяжению и ослаблению тросов, и при этом она обеспечивает проведение проверок тарирования и приспосабливаемости к техническому обслуживанию. Программа нагружения включает в себя алгоритм, отображающий стратегию управления, которая будет приспособлена для конкретной рассматриваемой платформы в фазе нагружения (например, в течение заполнения бетоном). Программа разгрузки включает в себя алгоритм, который отображает возврат исполнительного механизма в его положение покоя (используемое, например, тогда, когда настил моста подвергают предварительному напряжению). Как упомянуто выше, при приеме командных сигналов от контроллера будет обеспечено перемещение исполнительного механизма или исполнительных механизмов. Командные сигналы способствуют тому, что исполнительный механизм или исполнительные механизмы будут обеспечивать требуемую величину силы и/или ее соответствующее направление. Поэтому исполнительный механизм или исполнительные механизмы отвечает/отвечают за изменение натяжения напрягаемого троса или тросов, не сцепленных с бетоном, и таким образом регулируют предварительное напряжение основной конструкции. Для квалифицированных специалистов в этой отрасли будет очевидно, что увеличение или уменьшение натяжения троса будет/должно соответствовать необходимости противодействия внутренним силам, создаваемым в конструкции внешними воздействиями. В том случае, если имеется более одного троса, натяжение тросов может быть усилено или ослаблено согласованно или независимо друг от друга. Такая характеристика обеспечивает возможность регулирования предварительного напряжения в определенных частях основной конструкции. В других, менее благоприятных вариантах настоящего изобретения функцию контроллера может выполнять оператор, осуществляющий управление посредством электронной панели управления, позволяющей приводить в действие исполнительный механизм или исполнительные механизмы. В этом варианте оператор получает данные, передаваемые от датчика или датчиков, и интерпретирует их. В зависимости от считывания оператор в дальнейшем обеспечивает перемещение исполнительного механизма или исполнительных механизмов для осуществления воздействия на основную конструкцию сил самоуравновешивания. Такое полуавтоматическое регулирование предварительного напряжения конструкции будет менее точным, чем в случае полностью автоматического контроллера, и, следовательно, менее безопасным и надежным. Оно также вызывает необходимость постоянного управления оператором исполнительным механизмом или исполнительными механизмами в течение периодов времени, которые достигают нескольких часов, например, в течение заполнения настила моста бетоном. Также следует заметить, что настоящее изобретение предполагает оснащение системой автоматического регулирования предварительного напряжения и существующих платформ. Этот способ выполняют посредством оснащения существующей платформы упомянутыми выше важными элементами и системой согласно изобретению. Большое преимущество настоящего изобретения заключается в том, что онообеспечивает возмож-2 007676 ность приложения предварительного напряжения значительной величины без возникновения нежелательных деформаций в основной конструкции, когда не приложены внешние нагрузки. Если предварительное напряжение такой величины было бы приложено, используя известное фиксированное предварительное напряжение без приложенной внешней нагрузки, то основная конструкция была бы разрушена сверху вниз. Кроме того, настоящее изобретение обеспечивает значительное уменьшение потерь предварительного напряжения. Платформа с автоматическим регулированием предварительного напряжения имеет значительно уменьшенные отклонения среднего пролета, поскольку регулирование предварительного напряжения позволяет компенсировать основную нагрузку. Хотя предварительное напряжение включает в себя напряжения сжатия, по той же самой причине, которая указана ранее, изгибные перемещения на основной конструкции значительно уменьшены, что приводит к уменьшению максимальных напряжений в элементах основной конструкции. Таким образом, секции с конструктивными элементами могут быть значительно уменьшены, обеспечивая получение более легкой и более функциональной платформы. Кроме того, такая платформа также экономически более эффективна, чем имеющиеся известные платформы, поскольку она обеспечивает возможность значительно большего повторного использования одной платформы. Из описания этого патента будет очевидно, что платформа с возможностью автоматического регулирования предварительного напряжения может быть использована в значительно большем количестве ситуаций, чем известные платформы, благодаря ее приспосабливаемости к значительно большему количеству диапазонов уровней нагрузок (или диапазонов пролетов) без необходимости значительных дополнительных усилений. Еще одно значительное преимущество заключается в том, что режим работы конструкции платформы находится под непрерывным контролем, при этом опасным деформациям или натяжениям, которые вызваны внешним воздействием, будет оказано немедленное противодействие и по ним будет принято соответствующее решение. Когда используют дублирование, главным образом в отношении электронных компонентов или некоторых механических устройств, то в случае выхода из строя какого-либо компонента это не повлияет на безопасность платформы. Следует заметить, что термин предварительное напряжение в том смысле, в котором он здесь использован, предполагает воздействие на конструкцию семейства самоуравновешивающих сил, которые будут противодействовать внутренним силам, создаваемым в конструкции внешними воздействиями. Сущность изобретения поясняется на чертежах, где на фиг. 1 представлен упрощенный боковой вид варианта осуществления настоящего изобретения,на котором показаны основные элементы, которые составляют изобретение; на фиг. 2 - схематический вид в плане варианта осуществления конструкции платформы согласно фиг. 1; на фиг. 3 - конец напрягаемого троса, не сцепленного с бетоном, прикрепленный к основной конструкции, используя анкерное крепление, которое находится в пассивном/неподвижном состоянии; на фиг. 4 - конец напрягаемого троса, не сцепленного с бетоном, прикрепленный к основной конструкции, используя анкерное крепление, которое находится в активном/подвижном состоянии посредством гидроцилиндра, расположенного между ними; на фиг. 5 - схематическая диаграмма последовательности действий при возможном процессе автоматического управления согласно настоящему изобретению; на фиг. 6 - схема возможного осуществления алгоритма управления согласно настоящему изобретению; на фиг. 7 - упрощенное изображение гидравлической схемы; на фиг. 8 - схематическое изображение замкнутого потока текучей среды, в который введен датчик давления; на фиг. 9 - упрощенное изображение выдвигаемой соединительной стойки и отклоняющейся опоры; на фиг. 10 - упрощенное изображение другого варианта осуществления конструкции системы (подвижной посредством вращения) с подвижной стойкой и отклоняющейся опорой. Ниже приведено подробное описание изобретения со ссылками на конкретные предпочтительные варианты его осуществления и на упомянутые выше фигуры. Описание вариантов осуществления конструкции и фигур представлено лишь в качестве примера и его не следует рассматривать как ограничение объема изобретения, который определен в прилагаемых пунктах формулы изобретения. Как показано на фиг. 1, создана платформа, содержащая основную конструкцию (1), образованную двумя наружными секциями и одной средней секцией. Две наружные секции, которые предназначены для содействия процессу надвижки пролетных строений, ниже по высоте, чем средняя секция, которая предназначена для опорной опалубки и основных нагрузок. Основная конструкция представляет собой сквозную коробчатую ферму, которая имеет вид, подобный показанному на фиг. 1. Место нахождения опор определено по типичной строительной технологии, когда каждый участок заполнения бетоном,имеющий одну и ту же длину в пролете конструкции, начинается на расстоянии, приблизительно составляющем 1/5 пролета от передней опоры предыдущего участка. Основная конструкция (1) оснащена двумя наружными тросами (5), по одному с каждой продоль-3 007676 ной стороны конструкции. Тросы по очевидным причинам не должны быть сцеплены с бетоном и могут состоять из одной пряди или большого количества прядей. Напрягаемые, не сцепленные с бетоном тросы могут быть снабжены пластиковыми трубками, заполненными густой смазкой, или могут быть выполнены в соответствии с другими известными решениями. Эксцентриситет каждого наружного троса (5) обеспечивают посредством двух отстоящих друг от друга наружных отклоняющихся опор (14), удерживаемых посредством двух соответствующих соединительных стоек (13). Каждая соединительная стойка(13) имеет первый конец, соединенный с одной отклоняющейся опорой (14), и второй конец, соединенный с основной конструкцией (1). Соединительные стойки (13) предпочтительно выполнены убираемыми (посредством вращения) или выдвигаемыми для содействия процессу надвижки пролетных строений(см. фиг. 10). Каждый конец обоих тросов (5) прикреплен к основной конструкции (1) посредством двух анкерных устройств. Первые концы обоих наружных тросов (5) прикреплены к основной конструкции посредством фиксированных или пассивных известных крепежных устройств. Как показано на фиг. 3, эти крепежные устройства состоят из головок (16) известных крепежных устройств, которые прикреплены к прочным плитам (15), постоянно соединенным с основной конструкцией (1). Противоположные концы обоих тросов (5) прикреплены к подвижному анкерному устройству согласно настоящему изобретению. Как показано на фиг. 4, подвижное анкерное устройство согласно настоящему изобретению содержит головку (16) известного анкерного устройства, которая прикреплена к прочной плите (18), прикрепленной к одному гидравлическому цилиндру (23). Гидравлический цилиндр прикреплен к прочной противодействующей плите (17), которая постоянно соединена с основной конструкцией (1). Следует подчеркнуть, что возможно разнообразие других вариантов осуществления конструкции,например, противодействующая плита (17) может иметь два гидравлических цилиндра, установленных по боковым сторонам, а тросы могут находиться в средней секции, или, если требуется определенное количество тросов, равное количеству исполнительных механизмов, то они могут проходить через них(полые цилиндры согласно известному уровню техники). Перемещение поршня гидравлического цилиндра (23), которое может быть осуществлено посредством элементарных ходов, толкающих плиту (18) и головку (16) анкерного устройства в сторону от основной конструкции (1), представляет собой действие натяжения троса или тросов платформы и повышает уровень предварительного напряжения в конструкции. Напротив, приближение плиты (18) и головки (16) анкерного устройства к основной конструкции (1) представляет собой действие ослабления троса или тросов платформы и поэтому уменьшает уровень предварительного напряжения в конструкции. Перемещение поршня гидравлического цилиндра (23) обеспечивают посредством гидравлической схемы и подачи энергии, что будет дополнительно описано ниже. Величина силы, которая должна быть приложена посредством гидравлического цилиндра (23) к плите (18), связанная с числом ходов, совершаемых поршнем, находится в соответствии с обработанными сигналами, получаемыми от контроллера, а эти сигналы, в свою очередь, основаны на измерениях, выполняемых датчиком или датчиками. Следует заметить, что как подвижные, так и пассивные анкерные устройства выполнены с возможностью высвобождения тросов, когда имеется необходимость в их замене или когда конструкция должна быть транспортирована. Как вариант, и как показано на фиг. 9, натяжение и ослабление напрягаемых тросов (5), не сцепленных с бетоном, также может быть обеспечено посредством перемещения выдвигаемых стоек (13), если гидравлические цилиндры расположены между основной конструкцией (1) и отклоняющимися опорами(14). В случае этого варианта осуществления конструкции выдвижение поршня гидравлического цилиндра вызывает соответствующий отвод отклоняющейся опоры (14) от основной конструкции (1). Посредством этого действия трос, подсоединенный к отклоняющейся опоре, будет натянут, что приводит к увеличению предварительного напряжения конструкции. В этом случае исполнительный механизм должен одновременно увеличивать силу и эксцентриситет. Гидравлическая схема исполнительного механизма может быть подобна схеме, которая представлена на фиг. 7. Эта гидравлическая схема включает в себя гидравлический насос (20) и соответствующий двигатель (21), соединенные с некоторыми направляющими клапанами (22), некоторыми клапанами (25) ограничения давления и резервуаром (24). Направляющие клапаны (22), в свою очередь, посредством некоторых труб или трубопроводов (8) соединены с гидравлическим цилиндром или цилиндрами (23). Командные сигналы от контроллера приводят в действие электродвигатель (21), который обеспечивает подачу потока масла или подобной текучей среды в трубы (8). Командные сигналы также обеспечивают перемещение направляющих клапанов (22) для изменения направления потока масла или подобной текучей среды. Конструирование и монтаж гидравлической системы выполняют согласно обычным способам и используя известную технологию, соответствующую поставленной цели. В случае более одного исполнительного механизма (т.е. более одного цилиндра) конструкция гидравлической системы будет применена соответствующим образом. Важно то, чтобы сочетание гидравлической схемы и цилиндров не действовало чрезмерно быстрым способом, что могло бы подвергнуть опасности единство конструкции. Двигатель предпочтительно представляет собой электродвигатель, хотя в равной степени приемлемы и другие варианты.-4 007676 Требования заключаются в том, что гидравлическая система должна обеспечивать следующее:(i) максимальное усилие на каждом гидравлическом цилиндре равняется силе предварительного напряжения, которую он должен создавать;(ii) максимальный ход каждого поршня соответствует растяжению тросов, которые создает максимальную силу предварительного напряжения, плюс ход, необходимый для компенсации потерь предварительного напряжения, плюс конструктивный ход для облегчения установки тросов;(iii) минимальная скорость каждого поршня такова, что период реакции системы равен соответствующему периоду нагружения или меньше него;(iv) максимальная скорость поршня такова, что коэффициент(динамический коэффициент усиления) не влечет за собой неустойчивость системы - см. приведенное ниже уравнение 2, если не приняты другие меры, чтобы избежать проблем, касающихся динамики;(v) минимальное давление каждого поршня таково, что его размеры геометрически согласуются с возможностью его включения в платформу. Для осуществления автоматизма системы регулируемого предварительного напряжения, которая описана выше, платформа согласно изобретению также снабжена по меньшей мере одним датчиком для контроля режима работы основной конструкции (1). В предпочтительном варианте осуществления изобретения основная конструкция (1) снабжена датчиком, предпочтительно расположенным в зоне вблизи среднего пролета нижней поверхности конструкции (1). Датчик, например, представляет собой экстензометр, приклеенный к профилю в контролируемом участке, который должен обеспечить измерения изменений удлинения и, следовательно, изменений натяжения. Основная конструкция (1) предпочтительно также может быть оснащена датчиком давления, расположенным на половине пролета платформы, который должен обеспечить измерение давления и, следовательно, изменения уровня по высоте. Как показано на фиг. 8, это весьма простая стратегия выполнения измерений, основанная на разности статического давления между уровнем текучей среды в резервуаре (28), расположенном в фиксированном положении(например, поверх одной колонны) и соответствующим датчиком давления (26), расположенным у среднего пролета фермы (1) для надвижки пролетных строений, с гибкой магистралью для прохождения текучей среды в качестве их взаимного соединения (27). Какую-либо деформацию основной конструкции измеряют как изменение давления в датчике давления. На эту величину оказывают влияние только вертикальные перемещения, а боковые смещения или явления сжатия конструкции на нее не влияют. Естественно, чем больше количество датчиков, тем в большей степени происходит восприятие внешних и внутренних сил, действующих на основную конструкцию (1), и, следовательно, тем четче картина поведения конструкции в любое заданное время. Например, было бы предпочтительно иметь экстензометры, прикрепленные к нескольким элементам в виде диагональных косых связей, и проверять положение поршня гидравлического цилиндра посредством датчика измерительного преобразователя линейных перемещений. Однако, не отвергая дублирование, система становится проще, если согласно основному алгоритму контроля предполагается только одно измерение. Дополнительный датчик или датчики, которые могут быть установлены вблизи на поверхности или внутри элементов платформы,либо даже снаружи по отношению к основной конструкции (1), способны обеспечивать получение данных, которые должны быть направлены к контроллеру с помощью физического соединения с ним, либо посредством беспроволочной передачи, только для того, чтобы обеспечить дублирование. Текущий выходной сигнал каждого датчика должен быть учтен с обеспечением его невосприимчивости к тепловым изменениям и электромагнитным полям, особенно в том случае, когда измерительный преобразователь расположен в десятках метров от контроллера. Как упомянуто выше, контроллер (6) согласно настоящему изобретению содержит, по меньшей мере, компьютер или автомат (например, программируемый логический контроллер), который содержит компьютерное программное обеспечение или код для обработки данных. Такое компьютерное программное обеспечение заключает в себе фазу приема данных от датчика или датчиков (2), фазу обработки для обработки данных, полученных от датчика или датчиков (2), и фазу передачи для передачи обработанных данных или командных сигналов к исполнительному механизму или исполнительным механизмам. Следует заметить, что расстояние между датчиком или датчиками (2) и контроллером (6) не является ограничительным признаком. Разработку компьютерного программного обеспечения или кода для обработки данных выполняют согласно хорошо известным компьютерным технологиям на языке, совместимом с используемым компьютером или автоматом. Цель программы или кода для обработки данных заключается в создании стратегий контроля для автоматического управления системой регулируемого предварительного напряжения. В общем, будет использована одна из следующих стратегий контроля:a) контроль натяжений нижнего участка половины длины пролета (контрольный участок);b) контроль отклонения среднего пролета платформы. Разработанная стратегия (а) контроля преобразуется в простой алгоритм, подобный классическому алгоритму включено-выключено. В основном в случае платформы только с одним исполнительным механизмом, если натяжение на контрольном участке увеличивается, то поршень гидравлического цилиндра продвигается на заданный ход [перемещение в сторону от основной конструкции (1)], т.е. силы предварительного напряжения увеличиваются. С другой-5 007676 стороны, если натяжение уменьшается, то поршень гидравлического цилиндра (23) отводят на заданный ход [приближение к основной конструкции (1)], т.е. силы предварительного напряжения уменьшаются. Описанный выше алгоритм представлен на графике согласно фиг. 5. Этот алгоритм также может быть введен в следующее математическое уравнение: в котором Sci(G) - напряжение соответствующего волокна в контрольном поперечном сечении i вследствие собственного веса;tSci(Q) - напряжение соответствующего волокна в контрольном поперечном сечении i вследствие временной нагрузки при постоянном t;- приращение напряжения соответствующего волокна в контрольном поперечном сечении i,создаваемое при одном ходе гидравлического цилиндра;nct и nct+tколичество ходов выдвижения при постоянных t и t+t;- напряжение соответствующего волокна в контрольном поперечном сечении i вследствие воздействия автоматически регулируемого предварительного напряжения при постоянном t;ci и ai - граница сжатия и граница активности регулируемой системы (это уровни напряжения, которые вызывают создание сигналов датчиками). Использование алгоритма этого вида должно сопровождаться мерами фиксации настроек контроля для устранения неустойчивости. Обычно нагружение платформ происходит весьма медленно, например, заполнение бетоном таких конструкций как мостовой настил, занимает несколько часов. Следовательно, в частности, легко избежать эффекта динамического усиления. Все, что необходимо сделать, это обеспечить, чтобы период времени каждого хода был в несколько раз дольше, чем период естественной вибрации основной конструкции (1). Тем не менее, динамическое усиление должно быть определено в количественном выражении и должно быть проверено согласно следующему условию: В этом уравнениипредставляет собой коэффициент динамического усиления, измеренный в течение исключительного действия исполнительного механизма при выполнении хода, a j представляет собой каждую неопределенность j. Динамических проблем также можно избежать, используя фильтры программного обеспечения, например, отбрасывающие данные, отличающиеся от средних значений. При обычном применении изобретения основными неопределенностями, которые следует учитывать, являются разность напряжения на контрольном участке вследствие удлинения, равного максимальной ошибке показаний экстензометра (1), и разность напряжения на контрольном участке вследствие максимальной ошибки установки в заданное положение поршня гидравлического цилиндра (23) в течение основной траектории перемещения (2) [последняя сама по себе имеет несколько неопределенностей, а именно, те, которые связаны с особенностями материала основной конструкции (1) и тросов (5), с потерями напряжения и с ошибками при возведении конструкции]. Даже если задано упомянутое количественное выражение ошибок (или максимальные отклонения свойств материалов), исходя из поставляемого оборудования и поставляемых материалов, должны быть проведены испытания для экспериментальной количественной оценки соответствующих величин в течение процесса тарирования. В случае применения такого типа с заданной относительно большой продолжительностью нагружения задержкам реакции, в общем, можно не придавать значения. В то же время должно быть подтверждено соответствие следующему уравнению: Соответствие этому уравнению гарантирует, что при отсутствии нагрузки система будет возвращена в свое первоначальное положение. Фиксацию настроек контроля выполняют следующим образом:-6 007676 увеличение натяжения на контрольном участке i, созданное исполнительным механизмом в течение хода поршня, определяют в функции кратчайшего хода, который гидравлический цилиндр (23) способен выполнять с приемлемой точностью (если известен ход, который равен растяжению тросов, то известно предварительное напряжение и, следовательно, соответствующее изменение натяжения на контрольном участке также будет определено); как только известна эта величина, а также известна сумма неопределенностей (функция выбранного оборудования и выбранных материалов) можно определить ai, используя уравнение 3; значениепредварительно фиксируют и затем подтверждают посредством испытаний; наконец, фиксируют ci, обратившись к уравнению 2. Стратегия контроля (b) может быть определена посредством алгоритма, подобного алгоритму стратегии (a). В таком случае переменной контроля должно быть отклонение среднего пролета и должен быть применен вариант конструкции датчика согласно фиг. 8. Главным образом в случае платформы только с одним исполнительным механизмом, если отклонение среднего пролета превышает заданное значение, то поршень гидравлического цилиндра продвигается на заданный ход [перемещение от основной конструкции (1)]. С другой стороны, если отклонение среднего пролета превышает другую заданную величину (секция среднего пролета основной балочной фермы весьма высока), то гидравлический цилиндр (23) будет отведен на заданный ход [приближение к основной конструкции (1)], т.е. силы предварительного напряжения будут уменьшены. Такую стратегию контроля (b) проще применять, чем стратегию контроля (a), и она нечувствительна к местным явлениям (где расположен датчик). Эта стратегия может быть задана математически посредством уравнений, подобных уравнению 1. Этот процесс может быть легко обобщен для платформ с более чем одним исполнительным механизмом. Планирование более трудоемких стратегий выполняют с учетом факторов, подобных выполнению способа заполнения бетоном, либо учитывая не симметричные нагрузки, например, в случае криволинейных настилов мостов. Панель управления выполняют в соответствии с общепринятыми способами, исходя в каждом случае из определенных преимуществ и потребностей. Она может быть приведена в действие посредством нажимных кнопок или цифрового интерфейса. Панель управления предпочтительно размещена в платформе (1) вблизи от исполнительного механизма и гидравлического насоса (20). Для квалифицированных специалистов в этой отрасли будет очевидно, что управление системой также можно выполнять полуавтоматическим способом, при котором автоматический блок управления заменен оператором. В таком случае необходимо иметь простую электрическую панель, которая должна обеспечивать управление гидравлической схемой и гидравлическими цилиндрами, а именно, величиной и направлением прилагаемых сил. Оператор должен получать показания датчиков, расположенных вблизи на поверхности, внутри и/или снаружи по отношению к основной конструкции, интерпретировать эти показания и осуществлять ручное управление, при котором должен быть приведен в действие гидроцилиндр или гидроцилиндры, а также должен управлять направлением и уровнем такого действия. Такая полуавтоматическая система в большей степени склонна к появлению ошибки, чем описанная выше полностью автоматическая система, но она все же позволяет обеспечить другой осуществимый вариант настоящего изобретения. Для возможности легкого перемещения платформы согласно настоящему изобретению, например,от одного пролета к другому, важно уделить внимание некоторым функциональным требованиям. Для этого определенные элементы платформы, которые в значительной степени выступают за контуры конструкции, выполнены таким образом, чтобы они были подвижными, отводимыми или даже удаляемыми. Это особенно важно для соединительных стоек (13), отклоняющихся опор (14) и тросов (5). Некоторые решения могут быть разработаны так, чтобы добиваться этой цели в зависимости от каждой характеристики, касающейся надвижки пролетных строений. В одном из возможных вариантов осуществления изобретение обеспечено поворотными стойками, которые устанавливают в заданное положение посредством вспомогательных гидравлических цилиндров, и ход которых при вращении ограничен фиксированными конструктивными устройствами (см. фиг. 10). Также предполагается, что основная конструкция (1) может быть разделена на несколько модульных секций для ее приспосабливания к многим пролетам разной длины. Такая техническая характеристика является обычной для многих известных современных платформ. Согласно отличительным признакам конструкции в непосредственной близости от зон анкерных устройств и тех мест, где соединительные стойки (13) подсоединены к основной конструкции (1), могут быть установлены элементы жесткости (12). Отклоняющиеся опоры могут быть выполнены с некоторыми скользящими деталями (не показаны) на участках контакта с тросом или тросами, которые обеспечивают касательный ход последних и таким образом уменьшают возможные значительные силы трения для предотвращения фреттинг-усталости. Для этого также могут быть использованы смазанные колеса. Также может быть создана обеспечивающая безопасность система механического удерживания, устанавливаемая вблизи от исполнительного механизма там, где две регулируемые гайки закреплены на-7 007676 двух фиксированных стойках, при этом движение поршня происходит с небольшой задержкой, препятствуя таким образом перемещению исполнительного механизма назад в случае поломки каких-либо гидравлических компонентов. В гидравлической схеме исполнительных механизмов между направляющим клапаном и поршнем могут быть установлены несколько дополнительных удерживающих клапанов, тем самым предотвращая потери предварительного напряжения. Предпочтительно, чтобы система также была оснащена средствами создания сигнала тревоги, которые надежно обнаруживают возникновение опасностей. Помимо средств создания сигнала тревоги к помещению, в котором происходит управление, или даже в итоге к мобильным телефонам инженеров или операторов, находящихся в определенном месте, могут быть переданы аварийные сигналы или сообщения. Кроме того, также предпочтительно спроектировать и установить систему бесперебойного электропитания для обеспечения подачи энергии в случае ее отключения. В зависимости от важности каждого случая и предполагаемой опасности должно быть обеспечено дублирование большинства электронных компонентов, а также некоторых элементов гидравлической схемы. В реальной рабочей ситуации перед нагружением платформы также целесообразны некоторые операции, например, выполнение ряда предварительных и тарировочных испытаний. Эти испытания позволяют установить некоторые механические и конструктивные свойства и состояния, а также оценить соединения, упругость тросов, исполнение датчика или датчиков и функционирование и точность исполнительного механизма или исполнительных механизмов. Испытания следует выполнять до тех пор, пока не будет произведена требуемая наладка всей системы. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Платформа для использования в процессе сооружения мостов, виадуков и других конструкций,содержащая основную конструкцию; по меньшей мере один напрягаемый трос, не сцепленный с бетоном; первое анкерное устройство для крепления одного конца напрягаемого троса, не сцепленного с бетоном, к конструкции и второе анкерное устройство для крепления противоположного конца напрягаемого троса, не сцепленного с бетоном, к конструкции; отличающаяся тем, что она содержит по меньшей мере один блок датчиков, предназначенный для измерения физического изменения в основной конструкции, указывающие нагружение или внутренние силы основной конструкции, электронный интерфейс, преобразующий измерения в считываемые данные и передающий данные к контроллеру; исполнительный механизм, который постоянно расположен между основной конструкцией и напрягаемым тросом, не сцепленным с бетоном, предназначенный для изменения натяжения напрягаемого троса, не сцепленного с бетоном, соответственно контроллеру, так что натяжение увеличивается в ответ на увеличенные нагрузки или внутренние силы основной конструкции,либо уменьшается в ответ на уменьшенные нагрузки или внутренние силы основной конструкции. 2. Платформа по п.1, отличающаяся тем, что контроллер представляет собой, по меньшей мере, компьютер или автомат, обеспечивающий прогон, по меньшей мере, компьютерной программы или кода для обработки данных. 3. Платформа по п.1 и 2, отличающаяся тем, что компьютерная программа или код для обработки данных обеспечивают возможность считывания данных, передаваемых датчиком, и вычисления величины и/или направления силы, которая должна быть приложена исполнительным механизмом к напрягаемому тросу, не сцепленному с бетоном. 4. Платформа по п.1, отличающаяся тем, что функцию контроллера выполняет оператор, вручную управляющий переключающей панелью, подсоединенной по меньшей мере к одному исполнительному механизму. 5. Платформа по п.1, отличающаяся тем, что напрягаемый трос, не сцепленный с бетоном, выполнен внутренним или наружным по отношению к контуру основной конструкции. 6. Платформа по п.1 или 5, отличающаяся тем, что напрягаемый трос, не сцепленный с бетоном,имеет линейное или многолинейное расположение. 7. Платформа по п.1, отличающаяся тем, что натяжение напрягаемого троса, не сцепленного с бетоном, увеличивается или уменьшается посредством исполнительного механизма как результат перемещения анкерного устройства соответственно от основной конструкции и к ней. 8. Платформа по п.1, отличающаяся тем, что исполнительный механизм представляет собой по меньшей мере одну выдвигаемую стойку с первым концом, с возможностью отведения соединенным с опорой, которая удерживает напрягаемый трос, не сцепленный с бетоном, и со вторым концом, с возможностью отведения соединенным с основной конструкцией. 9. Платформа по пп.1 и 8, отличающаяся тем, что стойка или стойки, которые удерживают опоры,выполнены с возможностью отведения или перемещения посредством поступательного движения или-8 007676 вращения. 10. Платформа по п.1, отличающаяся тем, что датчик или каждый датчик расположен вблизи на поверхности или внутри элементов платформы, либо снаружи по отношению к основной конструкции. 11. Платформа по п.1 или 10, отличающаяся тем, что датчик представляет собой экстензометр, датчик давления, измерительный преобразователь линейных перемещений, лазерный датчик, гальванический элемент, уклономер, пьезометрический датчик или подобное устройство. 12. Платформа по любому из предшествующих пунктов, отличающаяся тем, что данные, измеренные датчиком или каждым датчиком и используемые для вычисления величины и/или направления сил,которые должны быть приложены исполнительным механизмом, представляют собой, по меньшей мере,давления, отклонения, повороты, деформации, напряжения или уровни нагрузок. 13. Платформа по любому из предшествующих пунктов, отличающаяся тем, что передачу считываемых данных между датчиком и контроллером и передачу обработанных данных между контроллером и исполнительным механизмом или каждым исполнительным механизмом осуществляют посредством электронной цепи, оптико-волоконного сообщения, радиочастот, инфракрасного излучения, технологииWI-FI или Blue Tooth. 14. Платформа по п.1, отличающаяся тем, что она выполнена с возможностью обеспечения опоры для опалубки по месту отливки конструкций либо для предварительно отливаемых сегментов, предварительно отливаемых мостовых ферм или даже для других конструктивных элементов. 15. Способ обеспечения имевшейся ранее платформы системой саморегулирования предварительного напряжения, отличающийся тем, что имевшуюся ранее платформу оснащают элементами по п.1.
МПК / Метки
МПК: E01D 21/00
Метки: автоматическим, предварительного, платформа, напряжения, регулированием
Код ссылки
<a href="https://eas.patents.su/13-7676-platforma-s-avtomaticheskim-regulirovaniem-predvaritelnogo-napryazheniya.html" rel="bookmark" title="База патентов Евразийского Союза">Платформа с автоматическим регулированием предварительного напряжения</a>
Морская эксплуатационная платформа
Номер патента: 448
Опубликовано: 26.08.1999
Автор: Тома Пьер-Арман
МПК: B63B 35/44
Метки: платформа, эксплуатационная, морская
Формула / Реферат:
1. Морская эксплуатационная платформа, в частности морская нефтепромысловая эксплуатационная платформа, содержащая верхнюю баржу (1), простирающуюся над уровнем моря и соединенную с полностью погруженным, полым нижним основанием (3) посредством частично погруженных соединительных ног (2), образующих резервуар плавучести и вытянутых по существу вертикально, отличающаяся тем, что ноги (2) вдоль подводного вертикального размера имеют, по меньшей...
Самоподъемная платформа с погружным резервуаром и способы установки и подъема резервуара
Номер патента: 1045
Опубликовано: 28.08.2000
Автор: Тома Пьер-Арман
МПК: E02B 17/00
Метки: самоподъемная, погружным, подъема, платформа, резервуара, резервуаром, установки, способы
Формула / Реферат:
1. Самоподъемная платформа, включающая в себя верхний плавучий корпус (10), перемещаемый по длине несущих опор (12), механические средства (18) перемещения опор (12) и погружной резервуар-хранилище (14), предназначенный для установки на грунт, отличающаяся тем, что в резервуаре (14) имеется нижний люк (26) для сообщения внутреннего пространства резервуара (14) с морской средой, при этом резервуар образует колоколообразную полость,...
Способ кислотного предварительного гидролиза биомассы
Номер патента: 4080
Опубликовано: 25.12.2003
Авторы: Гуэдес Соарес Алваро, Гарсиа Пинатти Далтро
МПК: C13K 1/02, B01J 19/02
Метки: гидролиза, предварительного, кислотного, биомассы, способ
Формула / Реферат:
1. Способ кислотного предварительного гидролиза биомассы, согласно которому а) подают биомассу в реактор для переработки; б) смачивают биомассу кислотным раствором; в) нагревают смесь кислотного раствора и биомассы; отличающийся тем, что биомассу уплотняют внутри реактора и количество вводимого кислотного раствора таково, что соотношение жидкость/твердое регулируют до значения 2; при этом нагревание производят до такой степени, которая в...
Устройство для переработки материалов, в частности для предварительного гидролиза биомассы или для варки минерала
Номер патента: 4438
Опубликовано: 29.04.2004
Авторы: Гарсиа Пинатти Далтро, Гуэдес Соарес Алваро
МПК: B01J 19/02, C13K 1/02
Метки: гидролиза, варки, устройство, частности, переработки, предварительного, материалов, минерала, биомассы
Формула / Реферат:
1. Устройство для переработки материалов, в частности для предварительного гидролиза биомассы или для выполнения варки минерала, содержащее наружный кожух (1.1-1.7) и внутреннее покрытие (2.1, 2.2), установленные в контакте друг с другом, отличающееся тем, что между внутренним покрытием (2.1, 2.2) и наружным кожухом (1.1-1.7) создан вакуум. 2. Устройство по п.1, отличающееся тем, что наружный кожух (1.1-1.7) выполнен из конструкционного...
Запись на многослойный носитель информации с регулированием мощности по возмущению
Номер патента: 4905
Опубликовано: 26.08.2004
Автор: Ван Вауденберг Рул
МПК: G11B 7/00
Метки: носитель, регулированием, возмущению, мощности, запись, информации, многослойный
Формула / Реферат:
1. Способ записи информации на многослойный носитель информации (1), заключающийся в том, что носитель информации облучают пучком излучения с мощностью записи, при этом многослойный носитель информации содержит по меньшей мере два по существу параллельных информационных слоя (6, 8), при этом способ содержит следующие этапы: a) определяют разность между характеристиками пропускания по меньшей мере одного слоя (6) по меньшей мере из двух...
Предыдущий патент: Синтетический дёрн
Следующий патент: Откидное укупорочное средство, литое в закрытом положении
Случайный патент: Способ разделения текучей среды в скважине и устройство для его осуществления