Аппарат для соединения трубчатых сердечников
Номер патента: 15088
Опубликовано: 30.06.2011
Авторы: Бенвенути Стефано, Никколаи Алессандро, Танкреди Антонио
Формула / Реферат
1. Аппарат для соединения и резания трубчатых сердечников для намотки рулонов, содержащий
устройство подачи указанных сердечников, предназначенное для размещения одного из указанных сердечников на роликовой опоре, причем указанный сердечник имеет передний конец и задний конец;
устройство проталкивания указанного сердечника в направлении продольной оси вдоль указанной опоры, причем указанное устройство проталкивания воздействует на указанный задний конец для того, чтобы переместить указанный передний конец на соединительную станцию, на указанной соединительной станции расположен задний конец соединяемого отрезка сердечника;
стягивающее устройство с периферийным приводом, приводящее указанный отрезок сердечника во вращение;
соединительное устройство, размещенное на указанной соединительной станции, содержащее подающее устройство клейкой ленты и передаточный ролик, приводящее указанный сердечник и указанный отрезок сердечника во вращение вокруг своей оси, поддерживающее передний конец указанного сердечника и задний конец указанного отрезка сердечника в фиксированном положении друг относительно друга, для стягивания указанной клейкой ленты с целью намотки и образования указанного стыкового соединения;
транспортирующее устройство, перемещающее в продольном направлении указанные соединенные сердечник и отрезок сердечника в направлении указанной продольной оси до станции резания, причем указанное транспортирующее устройство перемещает указанные соединенные сердечник и отрезок сердечника до тех пор, пока передний конец указанного отрезка сердечника не выйдет за указанную станцию резания на предварительно заданное расстояние;
режущее устройство для резания указанных соединенных друг с другом сердечника и указанного отрезка сердечника на указанной станции резания для получения отрезка сердечника, имеющего длину, равную указанному расстоянию;
отличающийся тем, что с указанным стягивающим устройством с периферийным приводом соединено устройство передачи числа оборотов, способное приводить указанный сердечник и указанный отрезок сердечника во вращение на предварительно заданное число оборотов.
2. Аппарат по п.1, в котором указанное устройство передачи числа оборотов содержит
устройство распознавания диаметра указанного сердечника;
вычислительное устройство, рассчитывающие указанное предварительно заданное число оборотов в зависимости от указанного диаметра;
устройство настройки стягивающего устройства с периферийным приводом в соответствии с сигналом, поступающим от указанного вычислительного устройства.
3. Аппарат по п.2, в котором указанное вычислительное устройство имеет резидентные программные средства для
детектирования числа N слоев клейкой ленты для намотки на указанное стыковое соединение сердечника;
расчета числа n оборотов для подачи входного сигнала в стягивающее устройство с периферийным приводом по уравнению n=N×D/d, где d - диаметр стягивающего устройства с периферийным приводом, D - диаметр сердечника, переданный указанным устройством распознавания; и
передачи указанного числа n указанному устройству настройки, чтобы оно инициировало вытягивающее движение сердечника и останавливало его при достижении указанного числа n оборотов.
4. Аппарат по п.1, в котором указанный передаточный ролик на указанной соединительной станции установлен на опоре, которая может быть подведена к/отведена от указанного стыкового соединения сердечника, в частности, указанная опора выбрана из группы, состоящей из
приводной опоры для автоматического перемещения передаточного ролика в положение контакта с указанным стыковым соединением сердечника;
опоры с ручным управлением для ручного перемещения передаточного ролика в положение контакта с указанным стыковым соединением сердечника.
5. Аппарат по п.2, в котором указанное устройство распознавания диаметра указанного сердечника выбрано из группы, состоящей из
устройства автоматического считывания результатов определения диаметра;
устройства сбора данных, получающего результаты измерений предварительно заданного диаметра;
комбинации устройства автоматического считывания и устройства сбора данных, в которой предусмотрено контрольное устройство для проверки совпадения предварительно заданного диаметра с автоматически считываемым диаметром.
6. Аппарат по п.1, в котором указанное транспортирующее устройство для продольного перемещения содержит два самоцентрирующихся ролика, расположенных с противоположных сторон от указанного отрезка сердечника, шарнирно установленных на соответствующих опорах, предназначенных для их перемещения к указанному отрезку сердечника с прижатием к указанному отрезку сердечника с боков для его зажимания, и для их разведения в стороны с его высвобождением, причем первый ролик из указанных роликов является приводным роликом, а второй из указанных роликов является поддерживающим роликом, указанные опоры могут сходиться и разводиться в стороны с помощью приводного устройства, и по меньшей мере с одним из указанных роликов ассоциирован кодовый датчик положения для точного измерения транспортировочного перемещения для стадий соединения и/или резания.
7. Аппарат по п.6, в котором каждая из указанных опор, предназначенных для схождения с зажатием указанного сердечника с боков и для разведения в стороны с его высвобождением, содержит кронштейн, вращающийся на оси, имеющий свободный конец, присоединенный к соответствующему ролику из указанных вращающихся роликов, причем указанное устройство автоматического считывания результата определения диаметра указанных сердечников содержит датчик углового положения, в частности потенциометр, установленный на оси одного из указанных вращающихся кронштейнов, в частности, указанный датчик углового положения установлен на оси вращения вращающегося кронштейна, удерживающего указанный поддерживающий ролик.
8. Аппарат по п.1, в котором предусмотрено упорное устройство для остановки переднего конца указанного отрезка сердечника в предварительно заданном положении при резании, причем указанное упорное устройство содержит
упорную каретку, поступательно перемещающуюся в продольном направлении;
упорный элемент, установленный на указанной упорной каретке и расположенный перпендикулярно по отношению к указанному продольному направлению;
устройство перемещения указанной упорной каретки;
устройство для отсоса стружки, образующейся при резании, в частности, указанное устройство отсоса содержит всасывающий канал, который начинается во всасывающем отверстии указанного упорного элемента.
9. Аппарат по п.1, в котором указанное устройство подачи указанных сердечников содержит
удлиненную ось со звездообразным поперечным сечением, проходящую вдоль оси вращения, параллельной указанной продольной оси, причем указанный звездообразный вал содержит по меньшей мере три непрерывных радиальных выступа, в частности, четыре указанных непрерывных выступа проходят по всей длине указанного звездообразного вала, будучи расположенными последовательно с направленными друг к другу торцами под прямым углом друг к другу;
приводное устройство, приводящее указанный звездообразный вал во вращение вокруг указанной оси вращения.
10. Аппарат по п.1, в котором указанное устройство проталкивания указанных сердечников в продольном направлении вдоль указанной опоры содержит
приводную каретку, поступательно перемещающуюся в направлении продольной оси указанных сердечников, причем указанная каретка выполняет первый подводящий ход;
подводящее устройство, функционально входящее в контакт с задним концом указанного сердечника и установленное на указанной каретке, содержащее приводной механизм, способное перемещаться относительно указанной каретки в направлении указанной продольной оси для выполнения дополнительного точного подводящего хода.
11. Аппарат по п.10, в котором указанное подводящее устройство содержит по меньшей мере два расположенных на одной линии маленьких поддерживающих ролика, имеющих ось вращения, перпендикулярную по отношению к продольной оси указанных сердечников, причем указанные ролики функционально входят в контакт с указанным задним концом.
12. Аппарат по п.1, в котором предусмотрено устройство прижимания указанного сердечника к указанной роликовой опоре, содержащее вертикальное прижимное устройство, действующее на указанный сердечник со стороны, противоположной указанной опоре, в частности, указанный толкатель установлен на указанной приводной каретке, в частности, указанное вертикальное прижимное устройство содержит
вилку, способную поступательно перемещаться радиально по отношению к сердечнику, имеющую свободный конец, ориентированный в направлении к сердечнику, причем указанный свободный конец содержит по меньшей мере два маленьких поддерживающих ролика, которые могут быть приведены во вращение путем вращения указанного сердечника;
приводное устройство для перемещения указанной вилки в радиальном направлении.

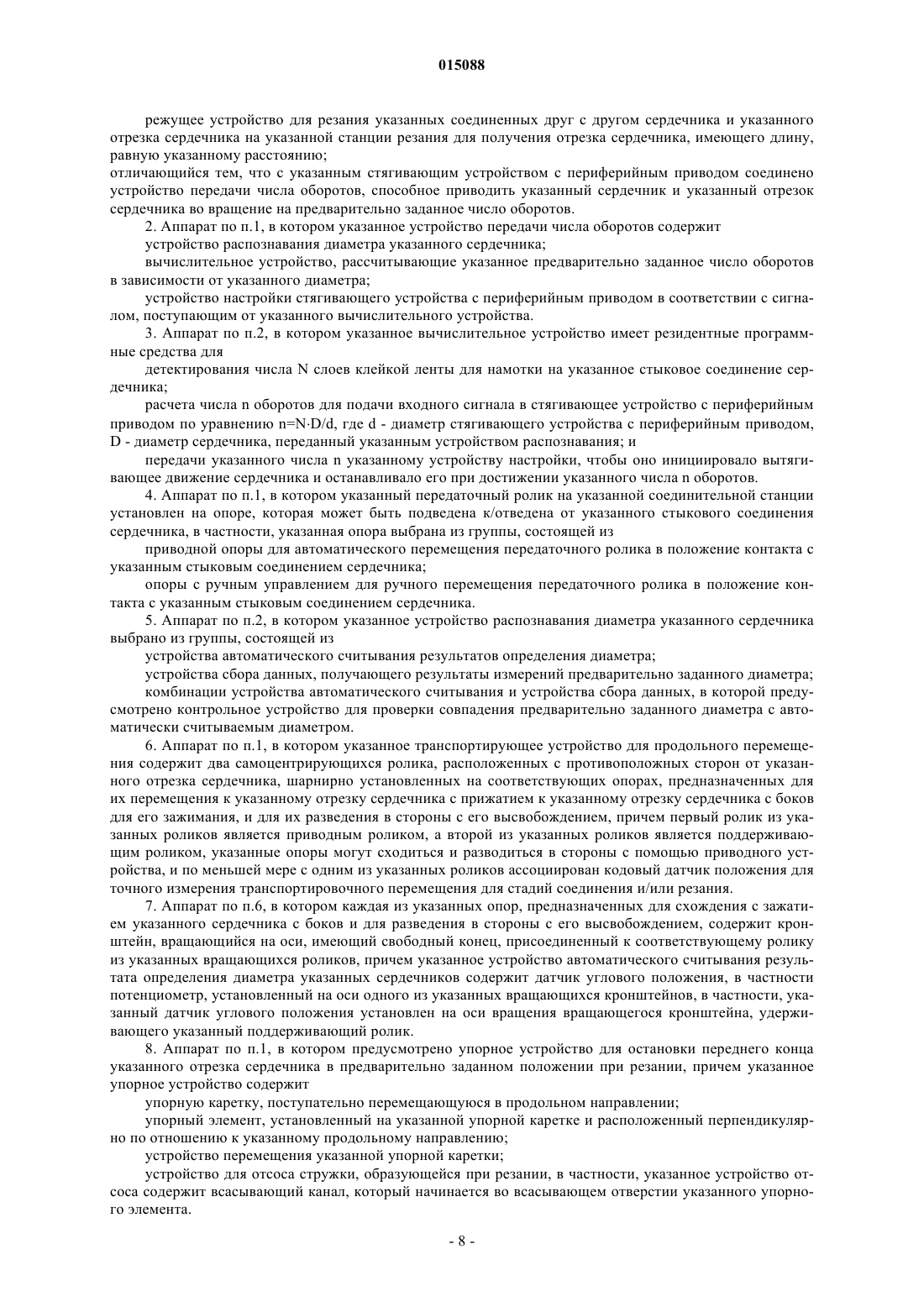
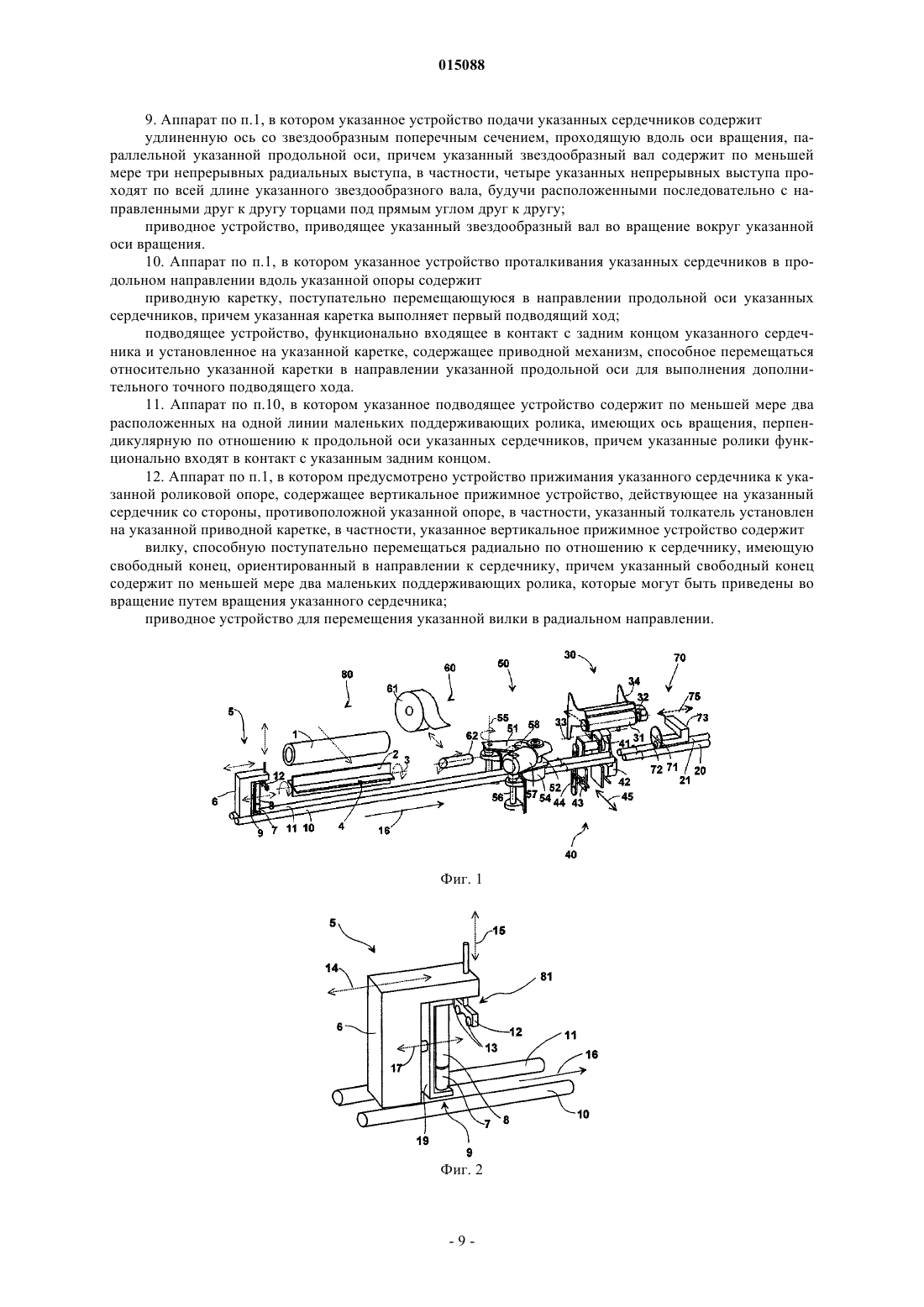
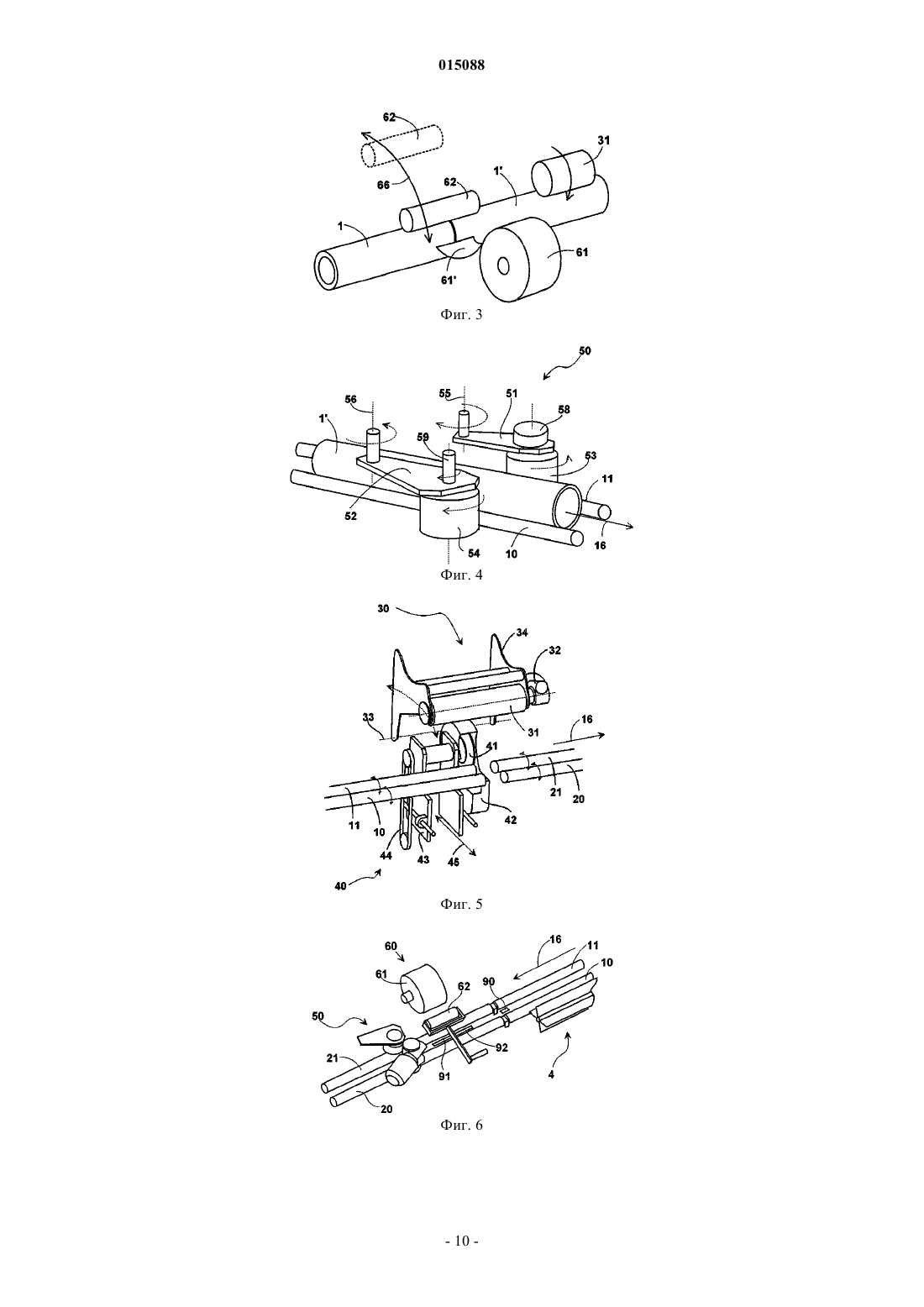
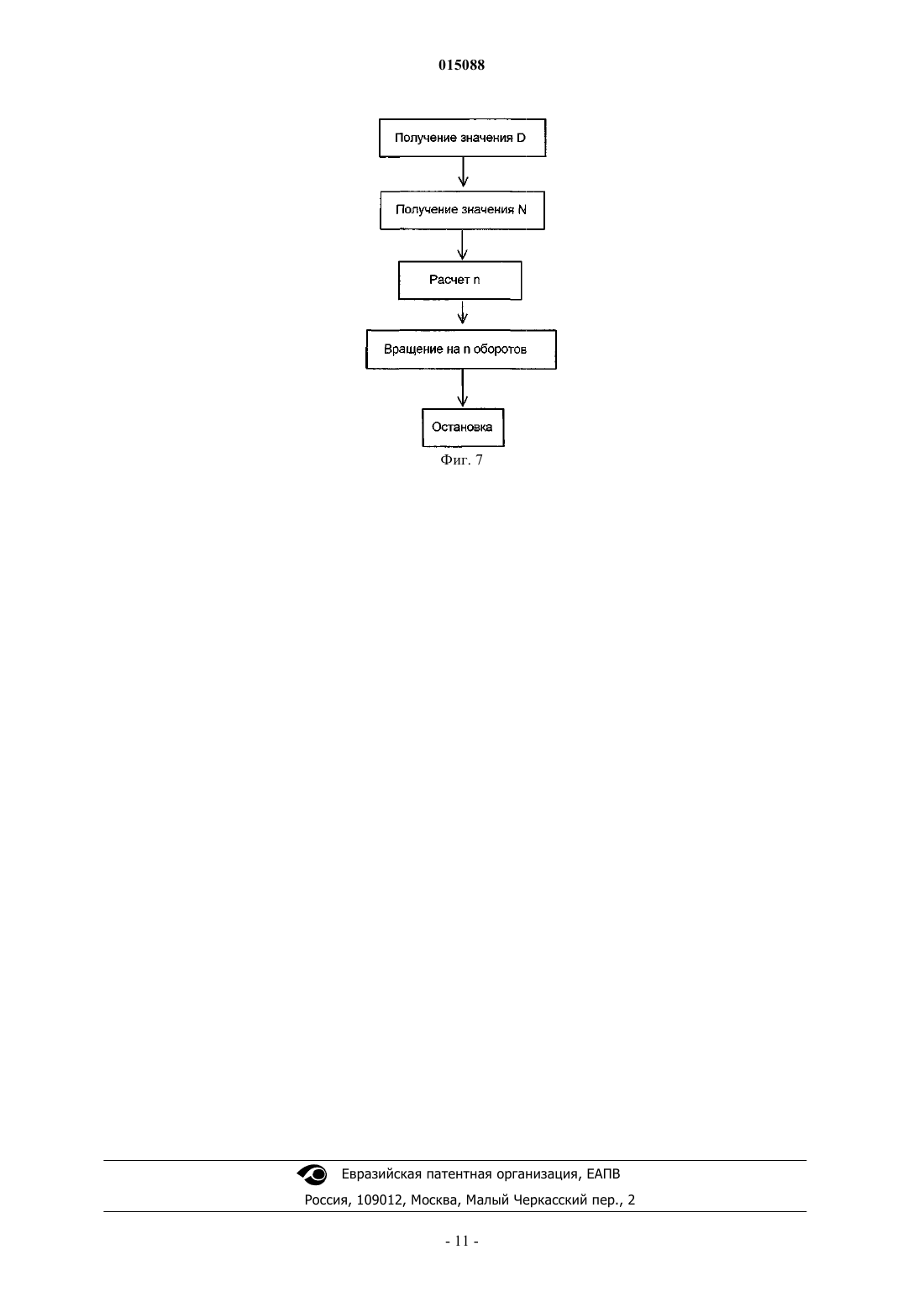
Текст
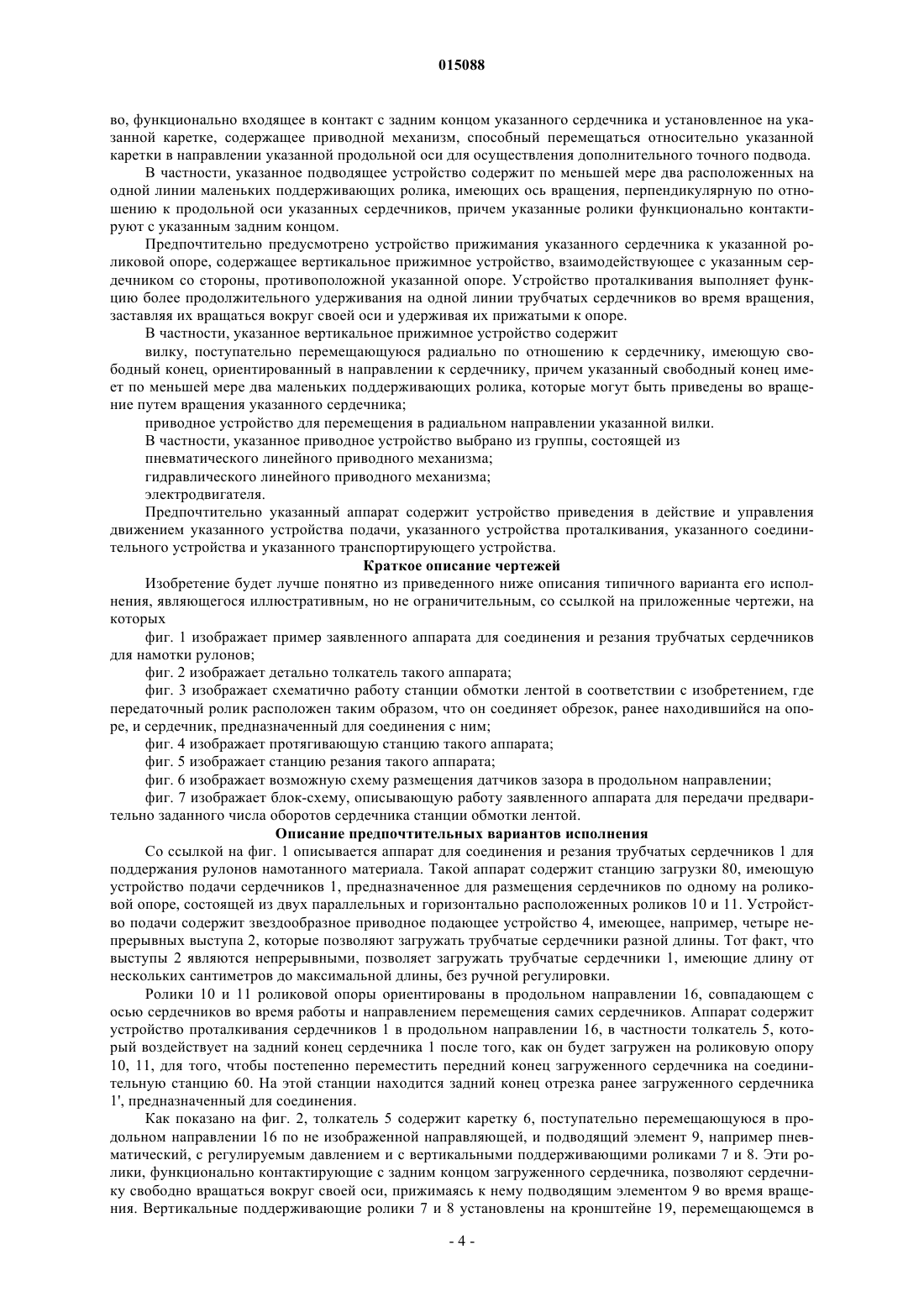
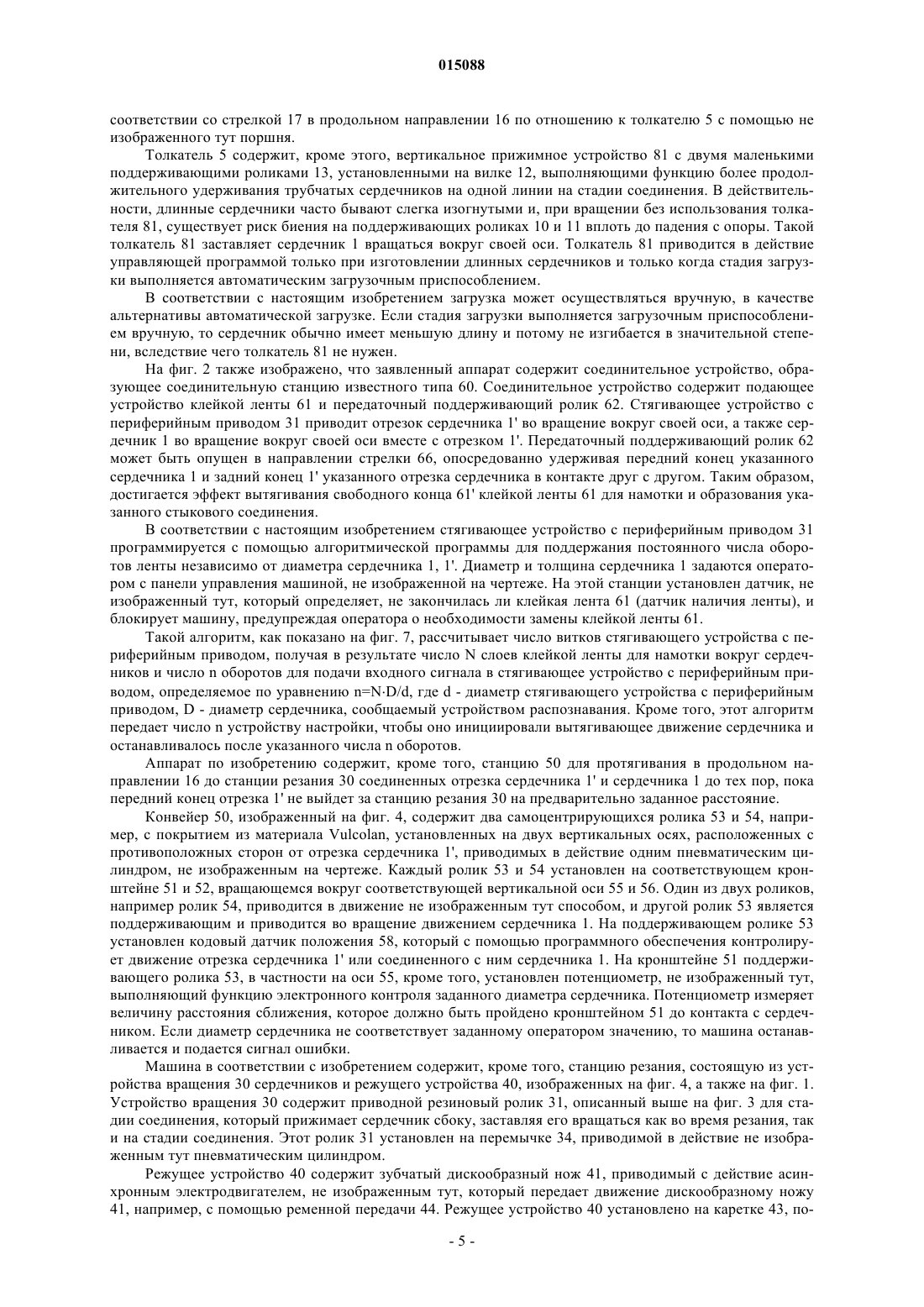
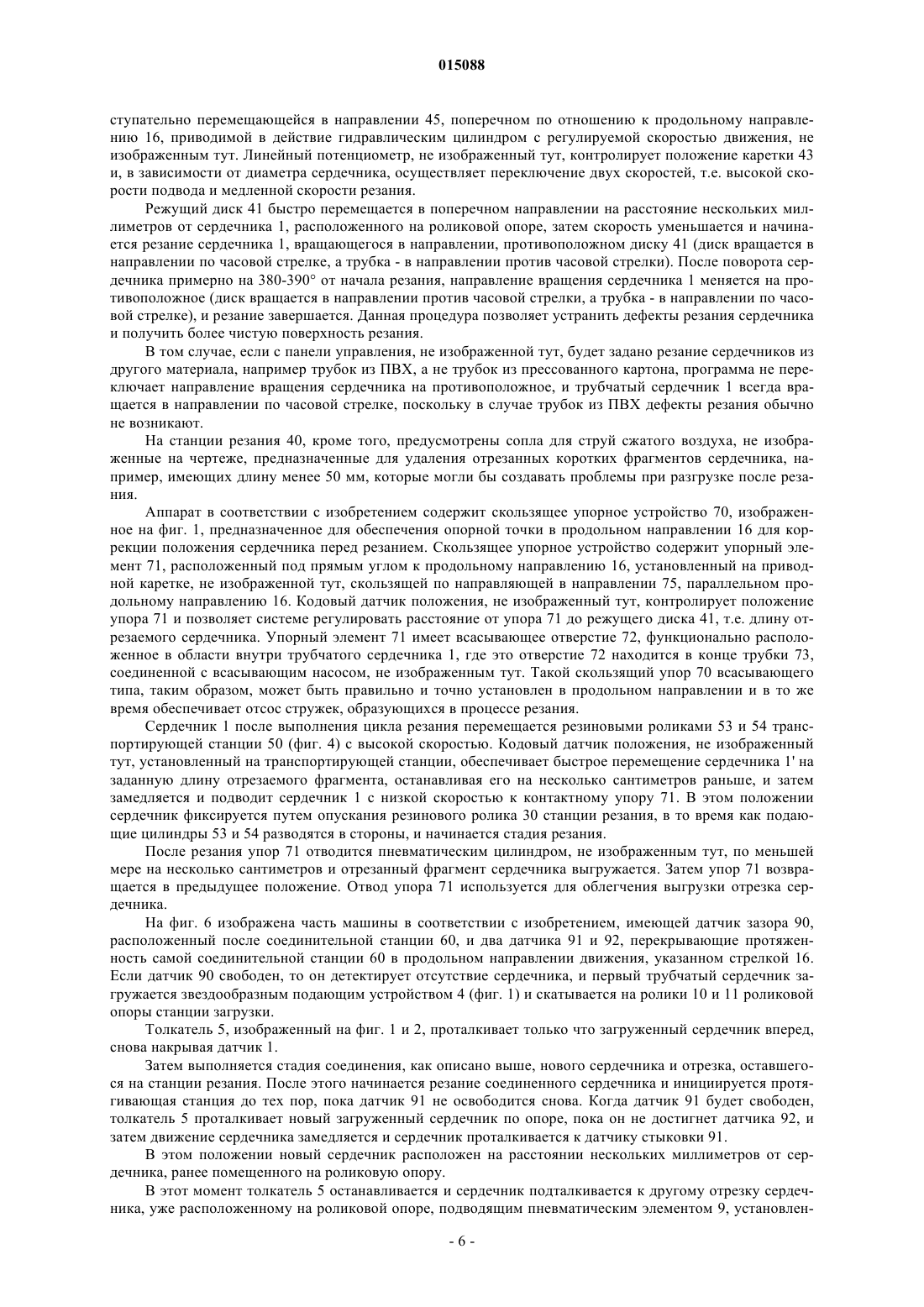
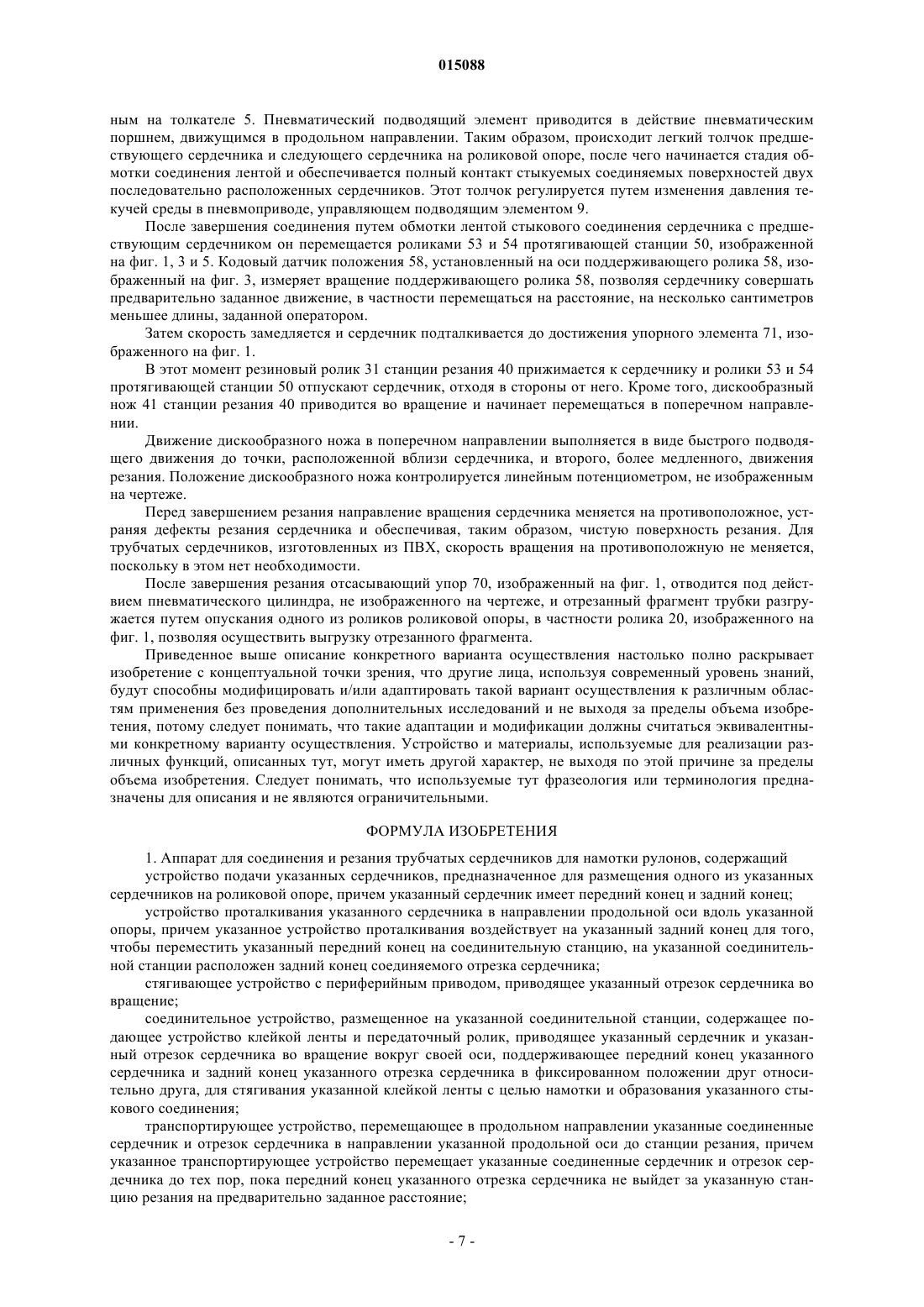
АППАРАТ ДЛЯ СОЕДИНЕНИЯ ТРУБЧАТЫХ СЕРДЕЧНИКОВ Аппарат для соединения и резания трубчатых сердечников (1), предназначенных для поддержания рулонов намотанного материала, включающий станцию загрузки (80), содержащую роликовую опору, состоящую из двух параллельных и горизонтально расположенных роликов (10 и 11),звездообразного приводного подающего устройства (4), имеющего, например, четыре непрерывных выступа (2), позволяющего загружать трубчатые сердечники разной длины. Ролики (10 и 11) роликовой опоры вытянуты в продольном направлении (16). Аппарат содержит толкатель (5),который воздействует на задний конец сердечника (1) после того, как он будет загружен на роликовую опору (10, 11), для перемещения переднего конца загруженного сердечника на соединительную станцию (60), где находится задний конец соединяемого отрезка ранее загруженного сердечника. Толкатель (5) содержит подводящий элемент (9) с вертикальными поддерживающими роликами (7 и 8). После станции загрузки (80) находится станция обмотки лентой (60) и передаточный ролик (62), перекрывающий два сердечника и способный осуществлять передачу движения вращения от отрезка сердечника к сердечнику. Дальше расположены транспортирующая станция (50), станция резания (30) и скользящий упор с отсосом (70). Аппарат имеет стягивающее устройство с периферийным приводом (30), оборудованное устройством передачи числа оборотов, способным приводить во вращение указанный сердечник и указанный отрезок сердечника на предварительно заданное число оборотов. 015088 Область техники Настоящее изобретение относится к машине, способной соединять два трубчатых сердечника, расположенных последовательно с направленными друг к другу торцами, и разрезать полученный соединенный сердечник на отрезки требуемой длины. Описание технической задачи Известны машины, способные соединять друг с другом два трубчатых сердечника, расположенных последовательно с направленными друг к другу торцами таким образом, чтобы передний конец предшествующего сердечника упирался в задний конец последующего сердечника и чтобы стыковое соединение образовывалось путем наматывания одного или нескольких слоев клейкой ленты. Стадия намотки клейкой ленты осуществляется путем подвода ее свободного конца так, чтобы она накладывалась на оба последовательно расположенных соседних сердечника в месте стыкового соединения. Затем последующий сердечник приводится во вращение и его движение передается предшествующему сердечнику с помощью поддерживающего резинового ролика, расположенного в месте стыка двух сердечников, таким образом, чтобы два сердечника вращались вокруг своей оси, вытягивая клейкую ленту и создавая стыковое соединение. Недостатком этой известной системы является то, что невозможно точно определить число витков клейкой ленты, намотанных вокруг сердечников, в результате чего получаемые стыки всегда будут отличаться друг от друга и, следовательно, иметь разные характеристики сопротивления. Фактически, поскольку два последовательно расположенных сердечника приводятся во вращение периферийным тяговым приводным роликом, опираясь на пару поддерживающих роликов, то при частом изменении диаметра соединяемых сердечников отношение скорости вращения сердечников и скорости вращения периферийного тягового ролика соединяемых сердечников будет меняться для каждого диаметра. Если, с одной стороны, слишком малое число слоев клейкой ленты дает слабый стык, то с другой стороны, слишком большое число слоев клейкой ленты является нежелательным, поскольку создаваемая ими толщина будет приводить к изменению диаметра, влияя на использование сердечника. Сущность изобретения Таким образом, задачей настоящего изобретения является создание аппарата для соединения с помощью клейкой ленты и разрезания трубчатых сердечников для намотки рулонов, предназначенного для получения одинаковых стыков для всех сердечников одного диаметра, т.е. с равным числом слоев клейкой ленты для любого диаметра сердечников. Другой целью изобретения является создание аппарата с усовершенствованной подачей сердечников для увеличения точности совмещения сердечников в зоне стыка. Другой целью изобретения является создание аппарата для подачи сердечников, имеющего систему подачи сердечников, которая облегчает загрузку сердечников и обеспечивает одновременную загрузку только одного сердечника. Другой целью изобретения является создание аппарата для подачи сердечников, имеющего высокоточную систему определения местоположения соединяемых участков сердечника. Другой целью изобретения является создание аппарата для подачи сердечников, позволяющего полностью автоматизировать операции формирования стыков и резания для любого диаметра сердечников. Эти и другие цели достигаются с помощью заявленного аппарата для соединения и разрезания трубчатых сердечников для намотки рулонов, содержащего устройство подачи указанных сердечников, предназначенное для размещения одного из указанных сердечников на роликовой опоре, причем указанный сердечник имеет передний конец и задний конец; устройство проталкивания указанного сердечника в направлении продольной оси указанной опоры,причем указанное устройство проталкивания воздействует на указанный задний конец для того, чтобы переместить указанный передний конец на соединительную станцию, и на указанной соединительной станции находится задний конец соединяемого отрезка сердечника; стягивающее устройство с периферийным приводом, приводящее указанный отрезок сердечника во вращение; соединительное устройство, находящееся на указанной соединительной станции, содержащее подающее устройство клейкой ленты и передаточный ролик для приведения во вращение указанного сердечника и указанного отрезка сердечника вокруг своей оси, поддерживающее передний конец указанного сердечника и задний конец указанного отрезка сердечника в фиксированном положении относительно друг друга, для стягивания указанной клейкой ленты с целью намотки и образования указанного стыкового соединения; транспортирующие устройство для перемещения в продольном направлении указанных соединенных сердечника и отрезка сердечника в направлении указанной продольной оси до станции резания,причем указанное транспортирующее устройство перемещает указанные соединенные сердечник и отрезок сердечника до тех пор, пока передний конец указанного отрезка сердечника не выйдет за указанную станцию резания на предварительно заданное расстояние;-1 015088 режущее устройство для разрезания на указанной станции резания соединенных друг с другом указанного сердечника и указанного отрезка сердечника с получением отрезка сердечника, длина которого равна указанному расстоянию; характеризующегося тем, что с указанным стягивающим устройством с периферийным приводом соединено устройство для передачи числа оборотов, способное обеспечить вращение указанного сердечника и указанного отрезка сердечника на предварительно заданное число оборотов. В частности, указанное устройство передачи числа оборотов содержит устройство распознавания диаметра указанного сердечника; вычислительное устройство для расчета указанного предварительно заданного числа оборотов в зависимости от указанного диаметра; устройство для настройки стягивающего устройства с периферийным приводом в соответствии с сигналом, поступающим от указанного вычислительного устройства. В частности, указанное вычислительное устройство имеет резидентные программные средства для определения числа N слоев клейкой ленты для намотки на указанное стыковое соединение сердечника; расчета по уравнению n=ND/d числа n оборотов для подачи входного сигнала в стягивающее устройство с периферийным приводом, где d - диаметр стягивающего устройства с периферийным приводом, D - диаметр сердечника, поступающий от указанного устройства распознавания; передачи указанного числа n указанному устройству настройки таким образом, чтобы оно инициировало стягивающее движение сердечника и останавливало его при достижении указанного числа n оборотов. Предпочтительно указанный передаточный ролик на указанной соединительной станции установлен на опоре, которая может быть подведена к/отведена от указанного стыкового соединения сердечника. В частности, указанная опора выбрана из группы, состоящей из ведомой опоры для автоматического перемещения передаточного ролика в положение контакта с указанным стыковым соединением сердечника; опоры с ручным управлением для ручного перемещения передаточного ролика в положение контакта с указанным стыковым соединением сердечника. Предпочтительно указанное устройство распознавания диаметра указанного сердечника выбрано из группы, состоящей из устройства автоматического считывания результата определения диаметра; устройства сбора данных для получения результатов измерений предварительно заданного диаметра; комбинации устройства автоматического считывания и устройства сбора данных, в которой предусмотрено контрольное устройство для проверки совпадения предварительно заданного диаметра с автоматически считываемым диаметром. Предпочтительно указанное транспортирующее устройство для продольного перемещения содержит два самоцентрирующихся ролика, расположенных с противоположных сторон по отношению к указанному участку сердечника, шарнирно установленных на соответствующих опорах, предназначенных для перемещения вплотную к указанному участку сердечника с боковым упором в указанный отрезок сердечника и его зажиманием, и для разведения их в стороны с его высвобождением, причем первый ролик из указанных роликов является приводным роликом, а второй из указанных роликов является поддерживающим роликом, указанные опоры предназначены для сжимания и разведения в стороны с помощью приводных устройств, и по меньшей мере с одним из указанных роликов соединен кодовый датчик положения для точного измерения транспортировочного перемещения на стадиях соединения и/или резания. В предпочтительном типичном варианте исполнения каждая из указанных опор, предназначенных для перемещения вплотную к указанному сердечнику с боковым упором для его зажатия и для разведения в стороны с его высвобождением, содержит кронштейн, вращающийся на оси и имеющий свободный конец, соединенный с соответствующим роликом из указанных вращающихся роликов. Предпочтительно указанное устройство автоматического считывания результата определения диаметра указанных сердечников содержит датчик углового положения, установленный на оси одного из указанных вращающихся кронштейнов, в частности указанный датчик углового положения установлен на оси вращения вращающегося кронштейна, удерживающего указанный поддерживающий ролик. В частности, указанный датчик углового положения представляет собой потенциометр. Предпочтительно указанный второй приводной ролик приводится во вращение электродвигателем,выбранным из группы, состоящей из мотора-редуктора с асинхронным электродвигателем и шагового электродвигателя. В частности, указанные два самоцентрирующихся ролика имеют покрытие из материала маркиVulcolan. Предпочтительно указанное стягивающее устройство с периферийным приводом содержит подвижную опору, расположенную радиально по отношению к указанным сердечникам;-2 015088 резиновый ролик, шарнирно соединенный с указанной подвижной опорой, причем ось вращения указанного резинового ролика параллельна оси сердечников; двигатель для приведения указанного резинового ролика во вращение вокруг его оси вращения в соответствии с предварительно заданным числом оборотов; приводное устройство для перемещения указанной подвижной опоры для введения указанного резинового ролика в контакт с боковой поверхностью указанных сердечников. Предпочтительно указанное подающее устройство клейкой ленты содержит датчик для детектирования присутствия клейкой ленты. Предпочтительно указанная станция резания содержит каретку суппорта, перемещающуюся в поперечном направлении по отношению к указанному продольному направлению; зубчатый дискообразный нож, расположенный перпендикулярно по отношению к указанному продольному направлению, закрепленный на опоре, установленной на указанной каретке; устройство перемещения указанной каретки суппорта; устройство, приводящее указанный дискообразный нож во вращение. В частности, указанное устройство перемещения указанной каретки суппорта содержит гидравлический цилиндр с регулируемой скоростью движения. Предпочтительно указанное устройство перемещения указанной каретки содержит устройство,обеспечивающее быстрый подвод и медленное перемещение при резании. Предпочтительно указанная станция резания содержит датчик положения, предназначенный для измерения положения указанной каретки суппорта в поперечном направлении. Предпочтительно на указанной станции резания предусмотрено устройство реверсирования вращения сердечника во время резания после того, как сердечник повернется на предварительно заданный угол. Таким образом, можно получить очень высокое качество резания. В частности, указанный предварительно заданный угол равен более 360, в частности задан в интервале значений 380-390. В частности, указанное устройство, приводящее во вращение указанный дискообразный нож, содержит асинхронный электродвигатель. Предпочтительно предусмотрено упорное устройство для остановки переднего конца указанного отрезка сердечника в предварительно заданном положении при резании. В частности, указанное упорное устройство содержит упорную каретку, поступательно перемещающуюся в продольном направлении; упорный элемент, установленный на указанной упорной каретке и ориентированный перпендикулярно по отношению к указанному продольному направлению; устройство перемещения указанной упорной каретки. В частности, указанный упорный элемент представляет собой плоскость. В частности, указанная упорная каретка содержит датчик положения. Предпочтительно указанное упорное устройство содержит устройство отсоса стружки для стружки,образующейся при резании. В частности, указанное устройство отсоса содержит всасывающий канал, который начинается во всасывающем отверстии, выполненном в указанном упорном элементе. В частности, указанное устройство подачи указанных сердечников содержит удлиненный корпус со звездообразным поперечным сечением, проходящий вдоль оси вращения параллельно указанной продольной оси, причем указанный звездообразный корпус содержит по меньшей мере три непрерывных радиальных выступа; приводное устройство, приводящее указанный звездообразный вал во вращение вокруг указанной оси вращения. Предпочтительно указанные выступы имеют протяженность по всей длине указанного звездообразного вала. В частности, указанный звездообразный вал содержит четыре радиальных непрерывных выступа,расположенных последовательно с торцами, направленными друг к другу под прямым углом. Тот факт,что радиальные выступы являются непрерывными, позволяет подавать или загружать сердечники переменной длины - от нескольких сантиметров до полной длины звездообразного вала. В частности, указанная роликовая опора, на которой указанное устройство подачи размещает один из указанных сердечников, содержит два поддерживающих ролика, расположенных параллельно продольной оси указанного звездообразного вала, причем указанные поддерживающие ролики установлены на меньшей высоте, чем указанная продольная ось указанного звездообразного вала, таким образом, чтобы после предварительно заданного поворота указанного звездообразного вала сердечник скатывался на указанную опору. В частности, указанное устройство проталкивания указанных сердечников в продольном направлении вдоль указанной опоры содержит приводную каретку, поступательно перемещающуюся в направлении продольной оси указанных сердечников, причем указанная каретка выполняет первичный подвод. В частности, указанное устройство проталкивания дополнительно содержит подводящее устройст-3 015088 во, функционально входящее в контакт с задним концом указанного сердечника и установленное на указанной каретке, содержащее приводной механизм, способный перемещаться относительно указанной каретки в направлении указанной продольной оси для осуществления дополнительного точного подвода. В частности, указанное подводящее устройство содержит по меньшей мере два расположенных на одной линии маленьких поддерживающих ролика, имеющих ось вращения, перпендикулярную по отношению к продольной оси указанных сердечников, причем указанные ролики функционально контактируют с указанным задним концом. Предпочтительно предусмотрено устройство прижимания указанного сердечника к указанной роликовой опоре, содержащее вертикальное прижимное устройство, взаимодействующее с указанным сердечником со стороны, противоположной указанной опоре. Устройство проталкивания выполняет функцию более продолжительного удерживания на одной линии трубчатых сердечников во время вращения,заставляя их вращаться вокруг своей оси и удерживая их прижатыми к опоре. В частности, указанное вертикальное прижимное устройство содержит вилку, поступательно перемещающуюся радиально по отношению к сердечнику, имеющую свободный конец, ориентированный в направлении к сердечнику, причем указанный свободный конец имеет по меньшей мере два маленьких поддерживающих ролика, которые могут быть приведены во вращение путем вращения указанного сердечника; приводное устройство для перемещения в радиальном направлении указанной вилки. В частности, указанное приводное устройство выбрано из группы, состоящей из пневматического линейного приводного механизма; гидравлического линейного приводного механизма; электродвигателя. Предпочтительно указанный аппарат содержит устройство приведения в действие и управления движением указанного устройства подачи, указанного устройства проталкивания, указанного соединительного устройства и указанного транспортирующего устройства. Краткое описание чертежей Изобретение будет лучше понятно из приведенного ниже описания типичного варианта его исполнения, являющегося иллюстративным, но не ограничительным, со ссылкой на приложенные чертежи, на которых фиг. 1 изображает пример заявленного аппарата для соединения и резания трубчатых сердечников для намотки рулонов; фиг. 2 изображает детально толкатель такого аппарата; фиг. 3 изображает схематично работу станции обмотки лентой в соответствии с изобретением, где передаточный ролик расположен таким образом, что он соединяет обрезок, ранее находившийся на опоре, и сердечник, предназначенный для соединения с ним; фиг. 4 изображает протягивающую станцию такого аппарата; фиг. 5 изображает станцию резания такого аппарата; фиг. 6 изображает возможную схему размещения датчиков зазора в продольном направлении; фиг. 7 изображает блок-схему, описывающую работу заявленного аппарата для передачи предварительно заданного числа оборотов сердечника станции обмотки лентой. Описание предпочтительных вариантов исполнения Со ссылкой на фиг. 1 описывается аппарат для соединения и резания трубчатых сердечников 1 для поддержания рулонов намотанного материала. Такой аппарат содержит станцию загрузки 80, имеющую устройство подачи сердечников 1, предназначенное для размещения сердечников по одному на роликовой опоре, состоящей из двух параллельных и горизонтально расположенных роликов 10 и 11. Устройство подачи содержит звездообразное приводное подающее устройство 4, имеющее, например, четыре непрерывных выступа 2, которые позволяют загружать трубчатые сердечники разной длины. Тот факт, что выступы 2 являются непрерывными, позволяет загружать трубчатые сердечники 1, имеющие длину от нескольких сантиметров до максимальной длины, без ручной регулировки. Ролики 10 и 11 роликовой опоры ориентированы в продольном направлении 16, совпадающем с осью сердечников во время работы и направлением перемещения самих сердечников. Аппарат содержит устройство проталкивания сердечников 1 в продольном направлении 16, в частности толкатель 5, который воздействует на задний конец сердечника 1 после того, как он будет загружен на роликовую опору 10, 11, для того, чтобы постепенно переместить передний конец загруженного сердечника на соединительную станцию 60. На этой станции находится задний конец отрезка ранее загруженного сердечника 1', предназначенный для соединения. Как показано на фиг. 2, толкатель 5 содержит каретку 6, поступательно перемещающуюся в продольном направлении 16 по не изображенной направляющей, и подводящий элемент 9, например пневматический, с регулируемым давлением и с вертикальными поддерживающими роликами 7 и 8. Эти ролики, функционально контактирующие с задним концом загруженного сердечника, позволяют сердечнику свободно вращаться вокруг своей оси, прижимаясь к нему подводящим элементом 9 во время вращения. Вертикальные поддерживающие ролики 7 и 8 установлены на кронштейне 19, перемещающемся в-4 015088 соответствии со стрелкой 17 в продольном направлении 16 по отношению к толкателю 5 с помощью не изображенного тут поршня. Толкатель 5 содержит, кроме этого, вертикальное прижимное устройство 81 с двумя маленькими поддерживающими роликами 13, установленными на вилке 12, выполняющими функцию более продолжительного удерживания трубчатых сердечников на одной линии на стадии соединения. В действительности, длинные сердечники часто бывают слегка изогнутыми и, при вращении без использования толкателя 81, существует риск биения на поддерживающих роликах 10 и 11 вплоть до падения с опоры. Такой толкатель 81 заставляет сердечник 1 вращаться вокруг своей оси. Толкатель 81 приводится в действие управляющей программой только при изготовлении длинных сердечников и только когда стадия загрузки выполняется автоматическим загрузочным приспособлением. В соответствии с настоящим изобретением загрузка может осуществляться вручную, в качестве альтернативы автоматической загрузке. Если стадия загрузки выполняется загрузочным приспособлением вручную, то сердечник обычно имеет меньшую длину и потому не изгибается в значительной степени, вследствие чего толкатель 81 не нужен. На фиг. 2 также изображено, что заявленный аппарат содержит соединительное устройство, образующее соединительную станцию известного типа 60. Соединительное устройство содержит подающее устройство клейкой ленты 61 и передаточный поддерживающий ролик 62. Стягивающее устройство с периферийным приводом 31 приводит отрезок сердечника 1' во вращение вокруг своей оси, а также сердечник 1 во вращение вокруг своей оси вместе с отрезком 1'. Передаточный поддерживающий ролик 62 может быть опущен в направлении стрелки 66, опосредованно удерживая передний конец указанного сердечника 1 и задний конец 1' указанного отрезка сердечника в контакте друг с другом. Таким образом,достигается эффект вытягивания свободного конца 61' клейкой ленты 61 для намотки и образования указанного стыкового соединения. В соответствии с настоящим изобретением стягивающее устройство с периферийным приводом 31 программируется с помощью алгоритмической программы для поддержания постоянного числа оборотов ленты независимо от диаметра сердечника 1, 1'. Диаметр и толщина сердечника 1 задаются оператором с панели управления машиной, не изображенной на чертеже. На этой станции установлен датчик, не изображенный тут, который определяет, не закончилась ли клейкая лента 61 (датчик наличия ленты), и блокирует машину, предупреждая оператора о необходимости замены клейкой ленты 61. Такой алгоритм, как показано на фиг. 7, рассчитывает число витков стягивающего устройства с периферийным приводом, получая в результате число N слоев клейкой ленты для намотки вокруг сердечников и число n оборотов для подачи входного сигнала в стягивающее устройство с периферийным приводом, определяемое по уравнению n=ND/d, где d - диаметр стягивающего устройства с периферийным приводом, D - диаметр сердечника, сообщаемый устройством распознавания. Кроме того, этот алгоритм передает число n устройству настройки, чтобы оно инициировали вытягивающее движение сердечника и останавливалось после указанного числа n оборотов. Аппарат по изобретению содержит, кроме того, станцию 50 для протягивания в продольном направлении 16 до станции резания 30 соединенных отрезка сердечника 1' и сердечника 1 до тех пор, пока передний конец отрезка 1' не выйдет за станцию резания 30 на предварительно заданное расстояние. Конвейер 50, изображенный на фиг. 4, содержит два самоцентрирующихся ролика 53 и 54, например, с покрытием из материала Vulcolan, установленных на двух вертикальных осях, расположенных с противоположных сторон от отрезка сердечника 1', приводимых в действие одним пневматическим цилиндром, не изображенным на чертеже. Каждый ролик 53 и 54 установлен на соответствующем кронштейне 51 и 52, вращающемся вокруг соответствующей вертикальной оси 55 и 56. Один из двух роликов,например ролик 54, приводится в движение не изображенным тут способом, и другой ролик 53 является поддерживающим и приводится во вращение движением сердечника 1. На поддерживающем ролике 53 установлен кодовый датчик положения 58, который с помощью программного обеспечения контролирует движение отрезка сердечника 1' или соединенного с ним сердечника 1. На кронштейне 51 поддерживающего ролика 53, в частности на оси 55, кроме того, установлен потенциометр, не изображенный тут,выполняющий функцию электронного контроля заданного диаметра сердечника. Потенциометр измеряет величину расстояния сближения, которое должно быть пройдено кронштейном 51 до контакта с сердечником. Если диаметр сердечника не соответствует заданному оператором значению, то машина останавливается и подается сигнал ошибки. Машина в соответствии с изобретением содержит, кроме того, станцию резания, состоящую из устройства вращения 30 сердечников и режущего устройства 40, изображенных на фиг. 4, а также на фиг. 1. Устройство вращения 30 содержит приводной резиновый ролик 31, описанный выше на фиг. 3 для стадии соединения, который прижимает сердечник сбоку, заставляя его вращаться как во время резания, так и на стадии соединения. Этот ролик 31 установлен на перемычке 34, приводимой в действие не изображенным тут пневматическим цилиндром. Режущее устройство 40 содержит зубчатый дискообразный нож 41, приводимый с действие асинхронным электродвигателем, не изображенным тут, который передает движение дискообразному ножу 41, например, с помощью ременной передачи 44. Режущее устройство 40 установлено на каретке 43, по-5 015088 ступательно перемещающейся в направлении 45, поперечном по отношению к продольному направлению 16, приводимой в действие гидравлическим цилиндром с регулируемой скоростью движения, не изображенным тут. Линейный потенциометр, не изображенный тут, контролирует положение каретки 43 и, в зависимости от диаметра сердечника, осуществляет переключение двух скоростей, т.е. высокой скорости подвода и медленной скорости резания. Режущий диск 41 быстро перемещается в поперечном направлении на расстояние нескольких миллиметров от сердечника 1, расположенного на роликовой опоре, затем скорость уменьшается и начинается резание сердечника 1, вращающегося в направлении, противоположном диску 41 (диск вращается в направлении по часовой стрелке, а трубка - в направлении против часовой стрелки). После поворота сердечника примерно на 380-390 от начала резания, направление вращения сердечника 1 меняется на противоположное (диск вращается в направлении против часовой стрелки, а трубка - в направлении по часовой стрелке), и резание завершается. Данная процедура позволяет устранить дефекты резания сердечника и получить более чистую поверхность резания. В том случае, если с панели управления, не изображенной тут, будет задано резание сердечников из другого материала, например трубок из ПВХ, а не трубок из прессованного картона, программа не переключает направление вращения сердечника на противоположное, и трубчатый сердечник 1 всегда вращается в направлении по часовой стрелке, поскольку в случае трубок из ПВХ дефекты резания обычно не возникают. На станции резания 40, кроме того, предусмотрены сопла для струй сжатого воздуха, не изображенные на чертеже, предназначенные для удаления отрезанных коротких фрагментов сердечника, например, имеющих длину менее 50 мм, которые могли бы создавать проблемы при разгрузке после резания. Аппарат в соответствии с изобретением содержит скользящее упорное устройство 70, изображенное на фиг. 1, предназначенное для обеспечения опорной точки в продольном направлении 16 для коррекции положения сердечника перед резанием. Скользящее упорное устройство содержит упорный элемент 71, расположенный под прямым углом к продольному направлению 16, установленный на приводной каретке, не изображенной тут, скользящей по направляющей в направлении 75, параллельном продольному направлению 16. Кодовый датчик положения, не изображенный тут, контролирует положение упора 71 и позволяет системе регулировать расстояние от упора 71 до режущего диска 41, т.е. длину отрезаемого сердечника. Упорный элемент 71 имеет всасывающее отверстие 72, функционально расположенное в области внутри трубчатого сердечника 1, где это отверстие 72 находится в конце трубки 73,соединенной с всасывающим насосом, не изображенным тут. Такой скользящий упор 70 всасывающего типа, таким образом, может быть правильно и точно установлен в продольном направлении и в то же время обеспечивает отсос стружек, образующихся в процессе резания. Сердечник 1 после выполнения цикла резания перемещается резиновыми роликами 53 и 54 транспортирующей станции 50 (фиг. 4) с высокой скоростью. Кодовый датчик положения, не изображенный тут, установленный на транспортирующей станции, обеспечивает быстрое перемещение сердечника 1' на заданную длину отрезаемого фрагмента, останавливая его на несколько сантиметров раньше, и затем замедляется и подводит сердечник 1 с низкой скоростью к контактному упору 71. В этом положении сердечник фиксируется путем опускания резинового ролика 30 станции резания, в то время как подающие цилиндры 53 и 54 разводятся в стороны, и начинается стадия резания. После резания упор 71 отводится пневматическим цилиндром, не изображенным тут, по меньшей мере на несколько сантиметров и отрезанный фрагмент сердечника выгружается. Затем упор 71 возвращается в предыдущее положение. Отвод упора 71 используется для облегчения выгрузки отрезка сердечника. На фиг. 6 изображена часть машины в соответствии с изобретением, имеющей датчик зазора 90,расположенный после соединительной станции 60, и два датчика 91 и 92, перекрывающие протяженность самой соединительной станции 60 в продольном направлении движения, указанном стрелкой 16. Если датчик 90 свободен, то он детектирует отсутствие сердечника, и первый трубчатый сердечник загружается звездообразным подающим устройством 4 (фиг. 1) и скатывается на ролики 10 и 11 роликовой опоры станции загрузки. Толкатель 5, изображенный на фиг. 1 и 2, проталкивает только что загруженный сердечник вперед,снова накрывая датчик 1. Затем выполняется стадия соединения, как описано выше, нового сердечника и отрезка, оставшегося на станции резания. После этого начинается резание соединенного сердечника и инициируется протягивающая станция до тех пор, пока датчик 91 не освободится снова. Когда датчик 91 будет свободен,толкатель 5 проталкивает новый загруженный сердечник по опоре, пока он не достигнет датчика 92, и затем движение сердечника замедляется и сердечник проталкивается к датчику стыковки 91. В этом положении новый сердечник расположен на расстоянии нескольких миллиметров от сердечника, ранее помещенного на роликовую опору. В этот момент толкатель 5 останавливается и сердечник подталкивается к другому отрезку сердечника, уже расположенному на роликовой опоре, подводящим пневматическим элементом 9, установлен-6 015088 ным на толкателе 5. Пневматический подводящий элемент приводится в действие пневматическим поршнем, движущимся в продольном направлении. Таким образом, происходит легкий толчок предшествующего сердечника и следующего сердечника на роликовой опоре, после чего начинается стадия обмотки соединения лентой и обеспечивается полный контакт стыкуемых соединяемых поверхностей двух последовательно расположенных сердечников. Этот толчок регулируется путем изменения давления текучей среды в пневмоприводе, управляющем подводящим элементом 9. После завершения соединения путем обмотки лентой стыкового соединения сердечника с предшествующим сердечником он перемещается роликами 53 и 54 протягивающей станции 50, изображенной на фиг. 1, 3 и 5. Кодовый датчик положения 58, установленный на оси поддерживающего ролика 58, изображенный на фиг. 3, измеряет вращение поддерживающего ролика 58, позволяя сердечнику совершать предварительно заданное движение, в частности перемещаться на расстояние, на несколько сантиметров меньшее длины, заданной оператором. Затем скорость замедляется и сердечник подталкивается до достижения упорного элемента 71, изображенного на фиг. 1. В этот момент резиновый ролик 31 станции резания 40 прижимается к сердечнику и ролики 53 и 54 протягивающей станции 50 отпускают сердечник, отходя в стороны от него. Кроме того, дискообразный нож 41 станции резания 40 приводится во вращение и начинает перемещаться в поперечном направлении. Движение дискообразного ножа в поперечном направлении выполняется в виде быстрого подводящего движения до точки, расположенной вблизи сердечника, и второго, более медленного, движения резания. Положение дискообразного ножа контролируется линейным потенциометром, не изображенным на чертеже. Перед завершением резания направление вращения сердечника меняется на противоположное, устраняя дефекты резания сердечника и обеспечивая, таким образом, чистую поверхность резания. Для трубчатых сердечников, изготовленных из ПВХ, скорость вращения на противоположную не меняется,поскольку в этом нет необходимости. После завершения резания отсасывающий упор 70, изображенный на фиг. 1, отводится под действием пневматического цилиндра, не изображенного на чертеже, и отрезанный фрагмент трубки разгружается путем опускания одного из роликов роликовой опоры, в частности ролика 20, изображенного на фиг. 1, позволяя осуществить выгрузку отрезанного фрагмента. Приведенное выше описание конкретного варианта осуществления настолько полно раскрывает изобретение с концептуальной точки зрения, что другие лица, используя современный уровень знаний,будут способны модифицировать и/или адаптировать такой вариант осуществления к различным областям применения без проведения дополнительных исследований и не выходя за пределы объема изобретения, потому следует понимать, что такие адаптации и модификации должны считаться эквивалентными конкретному варианту осуществления. Устройство и материалы, используемые для реализации различных функций, описанных тут, могут иметь другой характер, не выходя по этой причине за пределы объема изобретения. Следует понимать, что используемые тут фразеология или терминология предназначены для описания и не являются ограничительными. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Аппарат для соединения и резания трубчатых сердечников для намотки рулонов, содержащий устройство подачи указанных сердечников, предназначенное для размещения одного из указанных сердечников на роликовой опоре, причем указанный сердечник имеет передний конец и задний конец; устройство проталкивания указанного сердечника в направлении продольной оси вдоль указанной опоры, причем указанное устройство проталкивания воздействует на указанный задний конец для того,чтобы переместить указанный передний конец на соединительную станцию, на указанной соединительной станции расположен задний конец соединяемого отрезка сердечника; стягивающее устройство с периферийным приводом, приводящее указанный отрезок сердечника во вращение; соединительное устройство, размещенное на указанной соединительной станции, содержащее подающее устройство клейкой ленты и передаточный ролик, приводящее указанный сердечник и указанный отрезок сердечника во вращение вокруг своей оси, поддерживающее передний конец указанного сердечника и задний конец указанного отрезка сердечника в фиксированном положении друг относительно друга, для стягивания указанной клейкой ленты с целью намотки и образования указанного стыкового соединения; транспортирующее устройство, перемещающее в продольном направлении указанные соединенные сердечник и отрезок сердечника в направлении указанной продольной оси до станции резания, причем указанное транспортирующее устройство перемещает указанные соединенные сердечник и отрезок сердечника до тех пор, пока передний конец указанного отрезка сердечника не выйдет за указанную станцию резания на предварительно заданное расстояние;-7 015088 режущее устройство для резания указанных соединенных друг с другом сердечника и указанного отрезка сердечника на указанной станции резания для получения отрезка сердечника, имеющего длину,равную указанному расстоянию; отличающийся тем, что с указанным стягивающим устройством с периферийным приводом соединено устройство передачи числа оборотов, способное приводить указанный сердечник и указанный отрезок сердечника во вращение на предварительно заданное число оборотов. 2. Аппарат по п.1, в котором указанное устройство передачи числа оборотов содержит устройство распознавания диаметра указанного сердечника; вычислительное устройство, рассчитывающие указанное предварительно заданное число оборотов в зависимости от указанного диаметра; устройство настройки стягивающего устройства с периферийным приводом в соответствии с сигналом, поступающим от указанного вычислительного устройства. 3. Аппарат по п.2, в котором указанное вычислительное устройство имеет резидентные программные средства для детектирования числа N слоев клейкой ленты для намотки на указанное стыковое соединение сердечника; расчета числа n оборотов для подачи входного сигнала в стягивающее устройство с периферийным приводом по уравнению n=ND/d, где d - диаметр стягивающего устройства с периферийным приводом,D - диаметр сердечника, переданный указанным устройством распознавания; и передачи указанного числа n указанному устройству настройки, чтобы оно инициировало вытягивающее движение сердечника и останавливало его при достижении указанного числа n оборотов. 4. Аппарат по п.1, в котором указанный передаточный ролик на указанной соединительной станции установлен на опоре, которая может быть подведена к/отведена от указанного стыкового соединения сердечника, в частности, указанная опора выбрана из группы, состоящей из приводной опоры для автоматического перемещения передаточного ролика в положение контакта с указанным стыковым соединением сердечника; опоры с ручным управлением для ручного перемещения передаточного ролика в положение контакта с указанным стыковым соединением сердечника. 5. Аппарат по п.2, в котором указанное устройство распознавания диаметра указанного сердечника выбрано из группы, состоящей из устройства автоматического считывания результатов определения диаметра; устройства сбора данных, получающего результаты измерений предварительно заданного диаметра; комбинации устройства автоматического считывания и устройства сбора данных, в которой предусмотрено контрольное устройство для проверки совпадения предварительно заданного диаметра с автоматически считываемым диаметром. 6. Аппарат по п.1, в котором указанное транспортирующее устройство для продольного перемещения содержит два самоцентрирующихся ролика, расположенных с противоположных сторон от указанного отрезка сердечника, шарнирно установленных на соответствующих опорах, предназначенных для их перемещения к указанному отрезку сердечника с прижатием к указанному отрезку сердечника с боков для его зажимания, и для их разведения в стороны с его высвобождением, причем первый ролик из указанных роликов является приводным роликом, а второй из указанных роликов является поддерживающим роликом, указанные опоры могут сходиться и разводиться в стороны с помощью приводного устройства, и по меньшей мере с одним из указанных роликов ассоциирован кодовый датчик положения для точного измерения транспортировочного перемещения для стадий соединения и/или резания. 7. Аппарат по п.6, в котором каждая из указанных опор, предназначенных для схождения с зажатием указанного сердечника с боков и для разведения в стороны с его высвобождением, содержит кронштейн, вращающийся на оси, имеющий свободный конец, присоединенный к соответствующему ролику из указанных вращающихся роликов, причем указанное устройство автоматического считывания результата определения диаметра указанных сердечников содержит датчик углового положения, в частности потенциометр, установленный на оси одного из указанных вращающихся кронштейнов, в частности, указанный датчик углового положения установлен на оси вращения вращающегося кронштейна, удерживающего указанный поддерживающий ролик. 8. Аппарат по п.1, в котором предусмотрено упорное устройство для остановки переднего конца указанного отрезка сердечника в предварительно заданном положении при резании, причем указанное упорное устройство содержит упорную каретку, поступательно перемещающуюся в продольном направлении; упорный элемент, установленный на указанной упорной каретке и расположенный перпендикулярно по отношению к указанному продольному направлению; устройство перемещения указанной упорной каретки; устройство для отсоса стружки, образующейся при резании, в частности, указанное устройство отсоса содержит всасывающий канал, который начинается во всасывающем отверстии указанного упорного элемента.-8 015088 9. Аппарат по п.1, в котором указанное устройство подачи указанных сердечников содержит удлиненную ось со звездообразным поперечным сечением, проходящую вдоль оси вращения, параллельной указанной продольной оси, причем указанный звездообразный вал содержит по меньшей мере три непрерывных радиальных выступа, в частности, четыре указанных непрерывных выступа проходят по всей длине указанного звездообразного вала, будучи расположенными последовательно с направленными друг к другу торцами под прямым углом друг к другу; приводное устройство, приводящее указанный звездообразный вал во вращение вокруг указанной оси вращения. 10. Аппарат по п.1, в котором указанное устройство проталкивания указанных сердечников в продольном направлении вдоль указанной опоры содержит приводную каретку, поступательно перемещающуюся в направлении продольной оси указанных сердечников, причем указанная каретка выполняет первый подводящий ход; подводящее устройство, функционально входящее в контакт с задним концом указанного сердечника и установленное на указанной каретке, содержащее приводной механизм, способное перемещаться относительно указанной каретки в направлении указанной продольной оси для выполнения дополнительного точного подводящего хода. 11. Аппарат по п.10, в котором указанное подводящее устройство содержит по меньшей мере два расположенных на одной линии маленьких поддерживающих ролика, имеющих ось вращения, перпендикулярную по отношению к продольной оси указанных сердечников, причем указанные ролики функционально входят в контакт с указанным задним концом. 12. Аппарат по п.1, в котором предусмотрено устройство прижимания указанного сердечника к указанной роликовой опоре, содержащее вертикальное прижимное устройство, действующее на указанный сердечник со стороны, противоположной указанной опоре, в частности, указанный толкатель установлен на указанной приводной каретке, в частности, указанное вертикальное прижимное устройство содержит вилку, способную поступательно перемещаться радиально по отношению к сердечнику, имеющую свободный конец, ориентированный в направлении к сердечнику, причем указанный свободный конец содержит по меньшей мере два маленьких поддерживающих ролика, которые могут быть приведены во вращение путем вращения указанного сердечника; приводное устройство для перемещения указанной вилки в радиальном направлении.
МПК / Метки
МПК: B65H 75/50
Метки: трубчатых, сердечников, аппарат, соединения
Код ссылки
<a href="https://eas.patents.su/12-15088-apparat-dlya-soedineniya-trubchatyh-serdechnikov.html" rel="bookmark" title="База патентов Евразийского Союза">Аппарат для соединения трубчатых сердечников</a>
Способ соединения трубчатых деталей кузнечной сваркой
Номер патента: 9297
Опубликовано: 28.12.2007
Авторы: Олфорд Роберт Эндрю, Димитриадис Клистенис, Коул Энтони Томас
МПК: B23K 11/02, B23K 20/02, B23K 20/14...
Метки: трубчатых, способ, деталей, сваркой, кузнечной, соединения
Формула / Реферат:
1. Способ соединения трубчатых деталей кузнечной сваркой, содержащий размещение концов соединяемых трубчатых деталей на выбранном расстоянии друг от друга в пространстве, которое, по существу, заполнено продувочной смесью текучих сред; нагрев конца каждой трубчатой детали в указанном пространстве посредством высокочастотного электрического нагрева, причем используют по меньшей мере три электрода, которые прижимают с разнесенными по окружности...
Способы увеличения деформационной способности без разрушения сварочного соединения и определения геометрии сварочного соединения, система сваренных трубчатых элементов и устройство для определения геометрии сварочного соединения
Номер патента: 13206
Опубликовано: 30.04.2010
Авторы: Папка Скотт Д., Миннаар Карел, Макиа Марио Л., Сисак Уилльям Дж.
МПК: B23K 20/00, B23K 9/00, B23K 31/00...
Метки: трубчатых, система, сварочного, способности, геометрии, разрушения, элементов, увеличения, устройство, деформационной, способы, соединения, сваренных, определения
Формула / Реферат:
1. Способ увеличения деформационной способности без разрушения сварочного соединения, содержащий следующие этапы:формирование несущего сварочного шва между по меньшей мере двумя элементами с использованием первого процесса сварки и первого металла сварочного шва;формирование по меньшей мере одного сварочного шва деформации посредством наплавления второго металла сварочного шва рядом с несущим сварочным швом посредством второго процесса сварки,...
Способ и устройство для гидроформинга угловых трубчатых деталей без образования складок
Номер патента: 1975
Опубликовано: 22.10.2001
Автор: Хортон Фрэнк А.
МПК: B21D 26/02
Метки: деталей, угловых, трубчатых, устройство, образования, способ, гидроформинга, складок
Формула / Реферат:
1. Способ гидроформинга угловой трубчатой детали, имеющей участки с первой и второй осями, расположенными под углом друг к другу, по меньшей мере, 30ш, включающий помещение угловой трубной металлической заготовки в главным образом соответственно изогнутую полость штампа, причем трубная заготовка на своем участке изгиба имеет внешнюю поверхность с вогнутым и выпуклым участками поверхности на главным образом противоположных сторонах трубной...
Способ установки трубчатых элементов в осевом направлении в область земли с избыточным давлением
Номер патента: 3349
Опубликовано: 24.04.2003
Автор: Рэйнз Ричард Д.
МПК: E21B 7/20
Метки: избыточным, установки, область, земли, давлением, способ, элементов, направлении, трубчатых, осевом
Формула / Реферат:
1. Способ установки трубчатого элемента, имеющего верхний конец и закрытый нижний конец, в осевом направлении, по меньшей мере, через одну область земли с избыточным давлением, содержащий следующие этапы: бурение скважины до глубины, близкой к верхней части области земли с избыточным давлением, но не в нее, введение трубчатого элемента в буровую скважину, в которой закрытый нижний конец трубчатого элемента помещают близко к верхней части области...
Концевой фитинг для трубчатых элементов и способ его применения
Номер патента: 5052
Опубликовано: 28.10.2004
Автор: Фрэзер Дана Дж.
МПК: F16L 39/00
Метки: концевой, трубчатых, способ, применения, элементов, фитинг
Формула / Реферат:
1. Способ применения концевого соединения на трубопровод, содержащий установку внешнего обода вокруг трубчатой вставки для определения кольцевого зазора, размещение концевой части трубопровода в кольцевом зазоре, приложение направленной радиально наружу силы на внутреннюю стенку вставки для обеспечения вхождения вставки в зацепление с концевой частью трубопровода, и приложение направленной радиально внутрь силы на наружную стенку обода для...
Предыдущий патент: Устройство для крепления резца
Следующий патент: Устройство ввода гибкой трубы с устройством регулировки нагрузки на долото
Случайный патент: Препараты, содержащие цефалоспориновое соединение, и их применение в лечении бактериальных инфекций у кошек и собак