Малошумная буксируемая электромагнитная система для подземных геологических исследований
Номер патента: 12766
Опубликовано: 30.12.2009
Авторы: Магнус Руне Юхан, Линдквист Ульф Петер, Давидссон Пер Андерс, Тенгхамн Штиг Руне Леннарт, Карлссон Маттиас Фредрик, Крюльштедт Петер Гуннар
Формула / Реферат
1. Детекторная установка для системы морской электромагнитной съёмки, содержащая корпус из, по существу, электрически непроводящего материала с размещенным на нем электродом из электрически проводящего, по существу, неметаллического материала, причем при движении корпуса окружающий поток воды является, по существу, ламинарным, а также обеспечивается минимальное сопротивление потоку воды; крылья, соединенные с корпусом и выступающие от него наружу, выполненные с обеспечением стабилизации движения корпуса в воде, причем каждое крыло имеет место крепления для буксировочного кабеля, при этом крылья расположены симметрично относительно корпуса.
2. Установка по п.1, отличающаяся тем, что электрод выполнен с использованием графита.
3. Установка по п.1, отличающаяся тем, что корпус имеет внутреннюю камеру, в которой расположен схемный блок для измерения напряжений.
4. Установка по п.3, отличающаяся тем, что схемный блок содержит схему для измерения напряжений, избирательно подключаемую к соответствующим электродам, принадлежащим двум из ряда детекторных установок, установленных на буксировочных кабелях в отстоящих друг от друга положениях.
5. Установка по п.1, отличающаяся тем, что корпус выполнен с использованием усиленного волокнистого пластика.
6. Установка по п.1, отличающаяся тем, что корпус содержит по меньшей мере два стабилизатора, которые прикреплены к корпусу вблизи задней секции и расположены на противоположных сторонах корпуса.
7. Установка по п.1, отличающаяся тем, что корпус содержит по меньшей мере один внутренний отсек, заполненный электрически непроводящей, по существу, несжимаемой текучей средой, причем объём отсека и плотность текучей среды выбраны из условия обеспечения, по существу, нейтральной плавучести корпуса в воде.
8. Система морской электромагнитной съёмки, содержащая исследовательское судно для буксирования по меньшей мере одной пары отстоящих друг от друга детекторных установок, каждая из которых содержит корпус из, по существу, электрически непроводящего материала с размещенным на нем электродом из электрически проводящего, по существу, неметаллического материала, причем при движении корпуса окружающий поток воды является ламинарным, а также обеспечивается минимальное сопротивление потоку воды, причем каждая детекторная установка содержит крылья, соединенные с корпусом и выступающие от него наружу, выполненные с обеспечением стабилизации движения корпуса в воде, при этом каждое крыло имеет место крепления для буксировочного кабеля, и крылья расположены симметрично относительно корпуса; и два, по существу, компланарных параллельных буксировочных кабеля, буксируемых исследовательским судном каждый из которых присоединён к одному из указанных мест крепления на каждом корпусе, причем буксировочные кабели выполнены с возможностью передачи сигналов между двумя корпусами.
9. Система по п.8, отличающаяся тем, что электрод выполнен с использованием графита.
10. Система по п.8, отличающаяся тем, что корпус имеет внутреннюю камеру, в которой расположен схемный блок для измерения напряжений.
11. Система по п.10, отличающаяся тем, что схемный блок содержит схему для измерения напряжений, избирательно подключаемую к соответствующим электродам, принадлежащим двум из ряда детекторных установок, установленных на буксировочных кабелях в отстоящих друг от друга положениях.
12. Система по п.8, отличающаяся тем, что корпус выполнен с использованием усиленного волокнистого пластика
13. Система по п.8, отличающаяся тем, что корпус содержит по меньшей мере два стабилизатора, прикреплённых к корпусу вблизи задней секции и расположенных на противоположных сторонах корпуса.
14. Система по п.8, отличающаяся тем, что корпус содержит по меньшей мере один внутренний отсек, заполненный электрически непроводящей, по существу, несжимаемой жидкостью, причем объём отсека и плотность жидкости выбраны из условия обеспечения, по существу, нейтральной плавучести корпуса в воде.
15. Система по п.8, отличающаяся тем, что буксировочные кабели, присоединённые к каждой детекторной установке, по существу, компланарны и расположены симметрично относительно каждой детекторной установки.
16. Способ проведения морской электромагнитной съёмки, в котором генератор электрического и/или магнитного поля перемещают в водной массе, пропускают электрический ток в заданные интервалы времени через указанный генератор и индуцируют им в геологических формациях под водной массой по меньшей мере одно из магнитного и электрического полей, изменяющихся во времени; перемещают по меньшей мере один датчик в водной массе в направлении буксирования и детектируют с использованием датчика по меньшей мере одно из магнитного и электрического полей, возникающих в результате взаимодействия индуцированного поля с геологическими формациями, при этом датчик перемещают таким образом, чтобы минимизировать турбулентность в воде и минимизировать движение датчика в направлениях, отличных от направления буксирования, путем приложения тяговых усилий к по меньшей мере двум крыльям, соединенным с корпусом, который содержит указанный датчик, и выступающим от него наружу, причем каждое крыло выполнено с обеспечением стабилизации движения корпуса в воде и имеет место крепления для буксировочного кабеля, при этом крылья расположены симметрично относительно корпуса, а диаметр буксировочного кабеля минимизирован по отношению к тяговым усилиям, прикладываемым к датчику.
17. Способ по п.16, отличающийся тем, что поле детектируют путем измерения напряжения между двумя датчиками, перемещающимися в воде на расстоянии друг от друга, причем каждый датчик перемещают таким образом, чтобы минимизировать турбулентность в воде и минимизировать движение датчика в направлениях, отличных от направления буксирования.
18. Способ по п.16, отличающийся тем, что поле детектируют путем измерения характеристик магнитного поля.
19. Способ по п.16, отличающийся тем, что индуцирование поля включает индуцирование вертикального диполя магнитного поля.
20. Способ по п.16, отличающийся тем, что индуцирование поля включает индуцирование горизонтального диполя электрического поля.
Текст
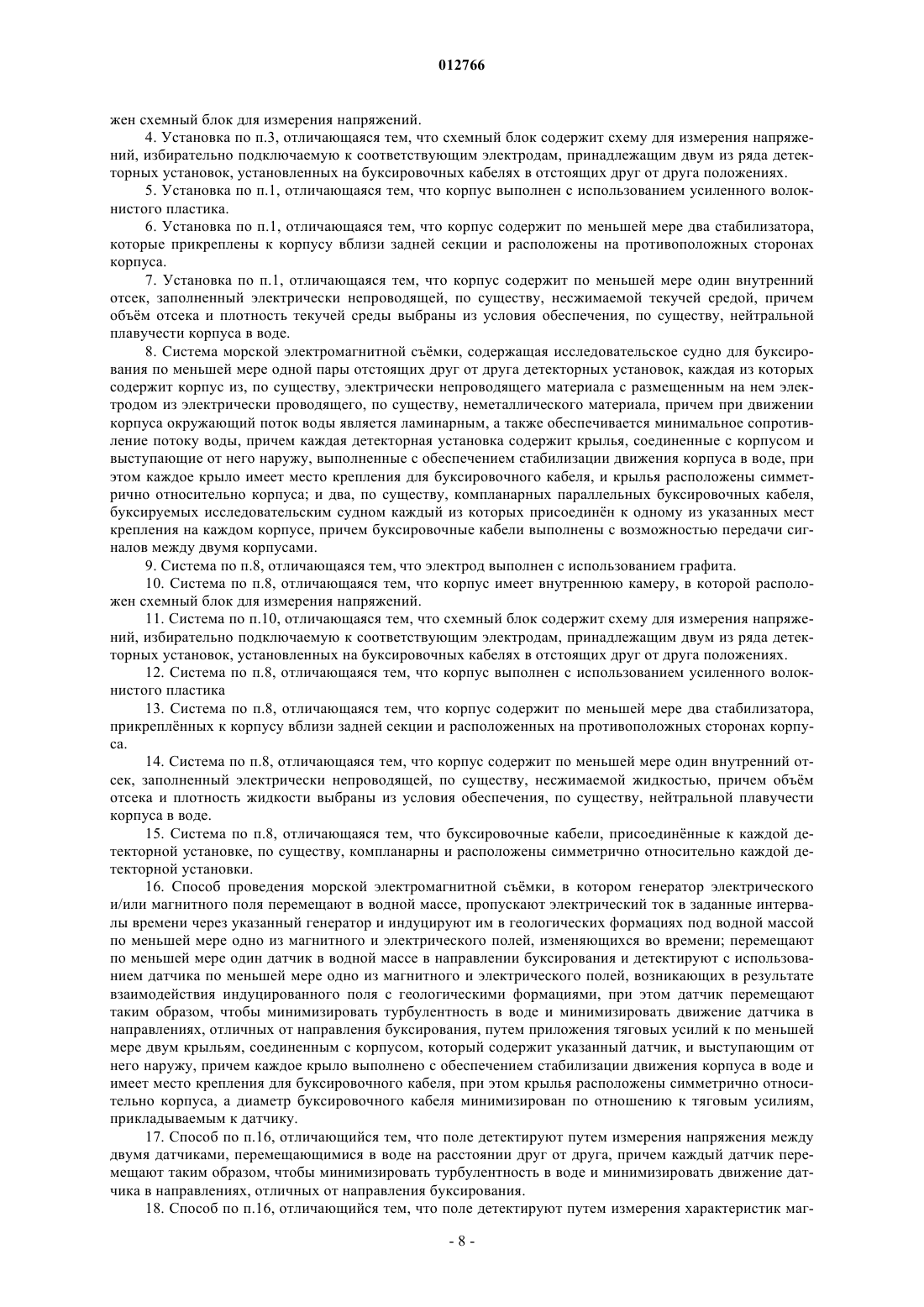
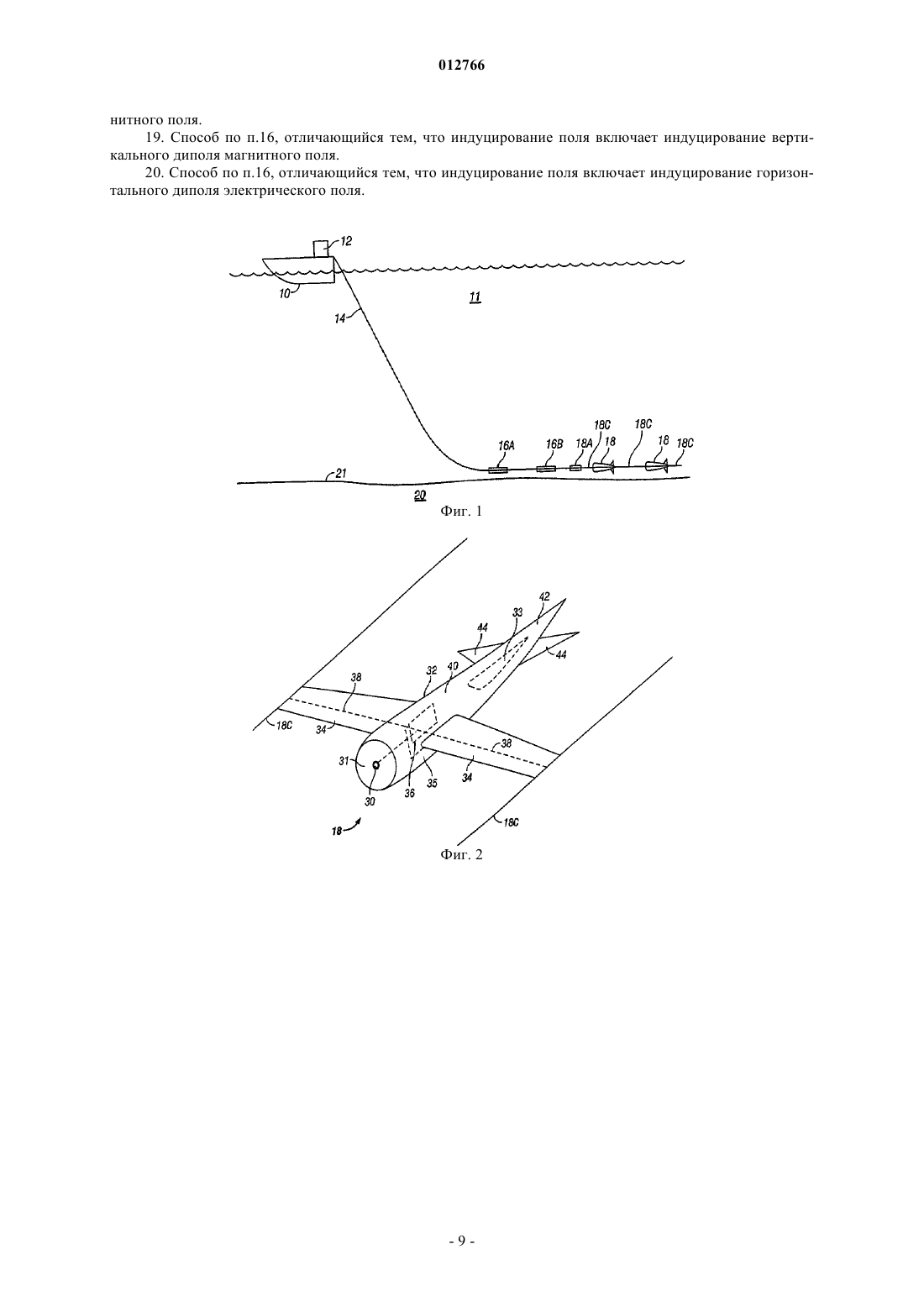
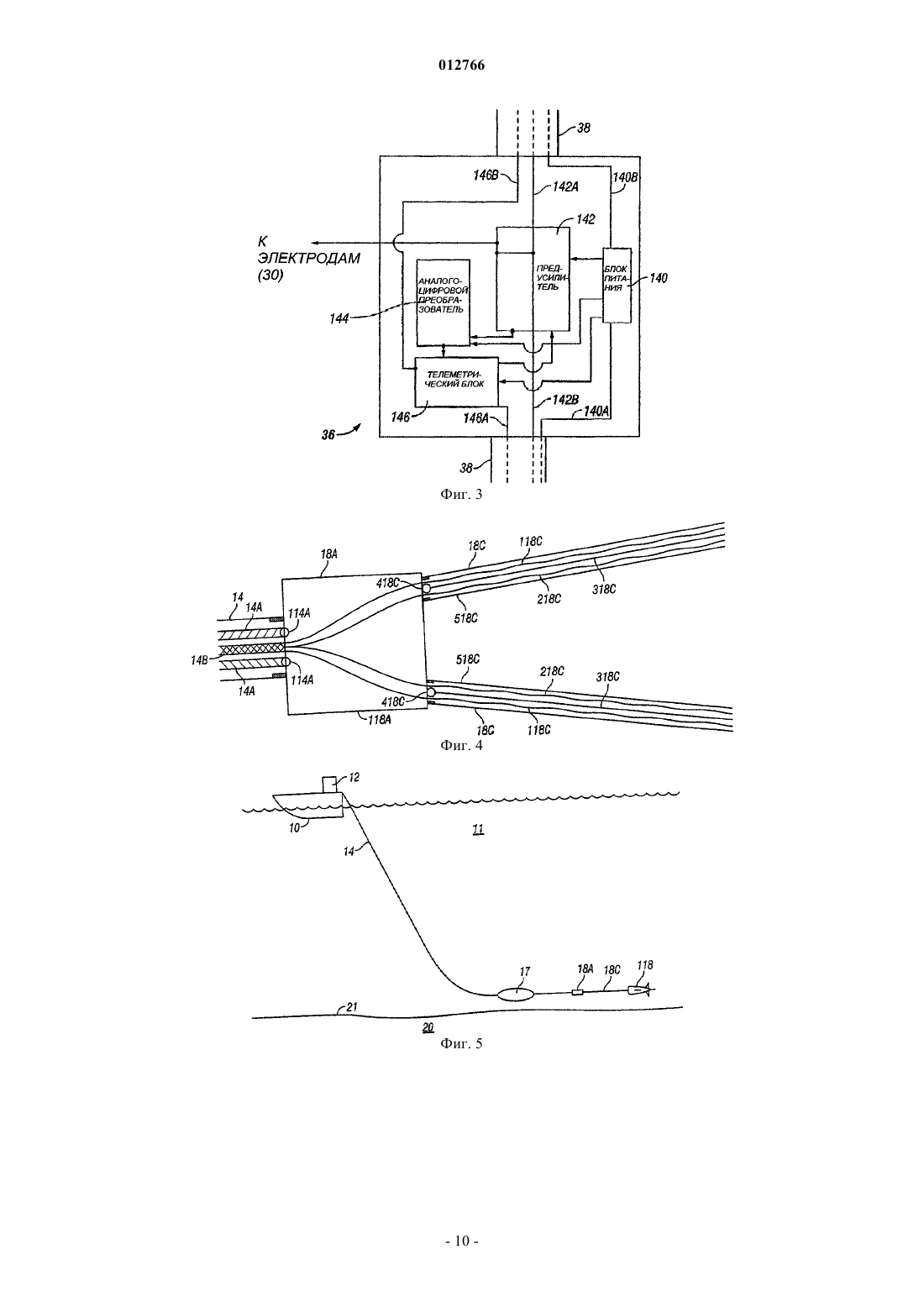
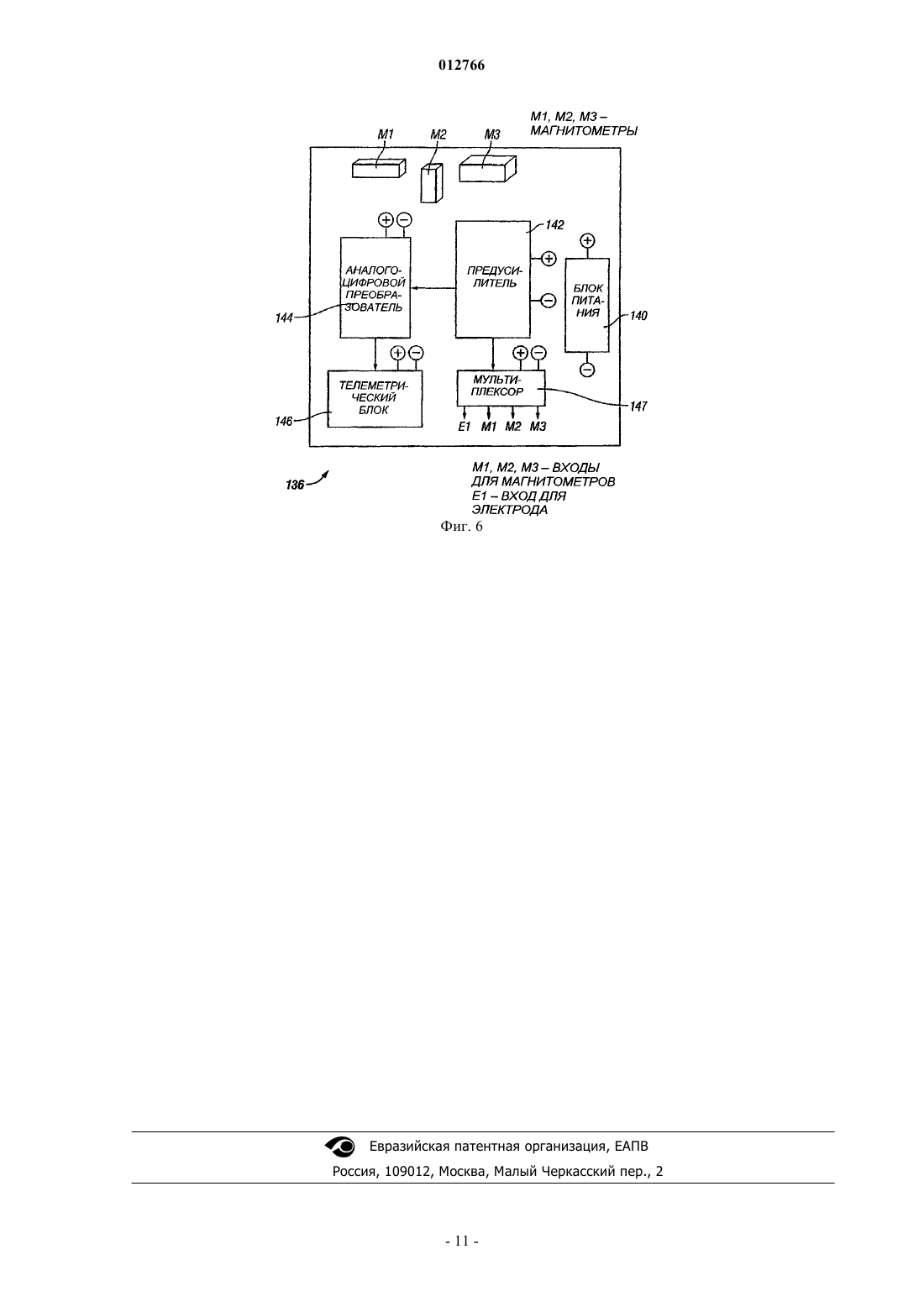
012766 Область техники, к которой относится изобретение Изобретение относится в основном к устройствам для электромагнитной съмки, предназначенным для выполнения глубинных исследований Земли. В частности, изобретение относится к конструкции примных электродов и их матриц для выделения индуцированного напряжения, возникающего в результате введения в Землю электромагнитных полей. Предшествующий уровень техники Электромагнитные исследования используются, помимо других целей, для обнаружения содержащих углеводороды структур в глубинных отложениях. Электромагнитные исследования включают технологию съмок с так называемым управляемым источником. Технология электромагнитной съмки с управляемым источником включает введение электрического тока или магнитного поля в среду, когда такие исследования проводятся на суше, или воздействие ими на осадки под толщей воды (донная поверхность), когда такие съмки проводятся на море. Технология включает измерение напряжения и/или магнитного поля, индуцируемого на электродах, антеннах и/или магнитометрах, расположенных на поверхности земли или на дне моря. Напряжения и/или магнитные поля индуцируются в результате взаимодействия электромагнитных полей, которые создаются электрическим током и/или магнитными полями, вводимыми в глубинные отложения (через донную поверхность при морских исследованиях), с геологическими формациями в Земле. Известные в геофизике морские электромагнитные исследования с управляемым источником обычно включают введение переменного электрического тока в осадки под донной поверхностью от источника тока, обычно расположенного на исследовательском корабле, через дипольный электрод, буксируемый этим судном. Дипольный электрод обычно представляет собой изолированный электрический кабель, имеющий два электрода, которые расположены на выбранном расстоянии друг от друга, равном от 300 до 1000 или более метров. Переменный ток может иметь одну или больше выбранных частот, обычно в диапазоне от 0,1 до 100 Гц. На морском дне размещается большое количество разнесенных друг от друга примных электродов, которые соединены с устройствами для записи напряжений, индуцируемых различными парами примных электродов. Такие исследования известны как электромагнитная съмка с управляемым источником в частотной области (f-CSEM). Технология f-CSEM исследований описана,например, в Sinha, M.C. Patel P.D., Unsworth M.J., Owen T.R.E. и MacCormack M.G.R. (1990), Система электромагнитного зондирования с активным источником для морских исследований, Морские геофизические исследования, 12, 29-68. Другие публикации, в которых описываются физические основы и интерпретация электромагнитных глубинных исследований, включают: Constable S.C. и Edwards R.N.A.D. (1987) К теории картирования проводимости морского дна с применением систем, основанных на использовании электромагнитных переходных процессов, Geophysics, 52,2, 204-217. Другой известной в геофизике технологией электромагнитных исследований глубинных формаций в Земле является электромагнитная съмка с управляемым источником, основанная на использовании переходных процессов (t-CSEM). При t-CSEM съмке электрический ток вводится в среду через электроды на кабеле, который аналогичен рассмотренному выше при описании f-CSEM. Электрический ток может быть постоянным током (DC). В заданный момент или моменты времени электрический ток выключается, и измеряется индуцируемое напряжение, обычно в течение выбранного интервала времени после выключения, с использованием электродов, расположенных на дне водной толщи, как и в рассмотренной выше f-CSEM съмке. Выводы о структурном строении и составе глубинных отложений делаются на основе изучения распределения во времени индуцированного напряжения. Технология t-CSEM съмки описана, например, в Strack, K.-M. (1992), Исследования с применением глубинного электромагнитного метода переходных процессов, Elsevier, 373 стр. (перепечатка 1999). Вне зависимости от используемой технологии, заключение о наличии структур, содержащих гидрокарбонаты, может быть сделано на основе использования контраста сопротивлений между гидрокарбонато-содержащими структурами, сопротивление которых может находиться в диапазоне от нескольких омметров до нескольких сотен омметров, и соседними не содержащими гидрокарбонаты глубинными формациями, имеющими сопротивление в диапазоне от 0,2 омметра до нескольких омметров. Технология предшествующих электромагнитных исследований при е реализации может потребовать больших затрат времени и средств, главным образом вследствие того, что примные электроды обычно размещаются на кабеле, который располагается на морском дне. Развртывание таких кабелей с примными электродами обычно включает их разматывание с исследовательского судна или другого развертывающего корабля, определение геодезического положения электродов после развртывания и извлечение кабелей после завершения съмки. Поэтому для изучения значительной площади глубинных отложений потребуется развертывание большого числа таких кабелей и/или повторное развртывание кабелей в разных местах на донной поверхности. Основная причина использования развртываемых на морском дне (стационарных) примных кабелей заключается в том, что индуцируемое напряжение между парами электродов, связанное с воздействием электромагнитного поля, является достаточно слабым,поэтому помехи, которые были бы индуцированы на электродах при их перемещении в воде, затруднили-1 012766 бы измерение напряжений, вызванных электромагнитными эффектами. В геофизике известны некоторые виды морских исследований, в которых используется буксирование кабеля с электродами, в частности, как отмечалось выше, для введения электрического поля в геологические формации под толщей воды. Однако использование известных в геофизике способов буксирования электродов для выделения индуцируемого электромагнитными полями напряжения, представляет определнные трудности при выполнении съмки с известными в данной области техники электродами,в частности, из-за вибрации буксируемых кабелей при их движении в воде. Влияние этого процесса на смонтированные на кабеле электроды изучалось ранее при исследовании подводных примных антенн. В результате этих исследований было идентифицировано большое число источников помех. См., например, M.L. Burrows, IEEE Trans. Comm., 22 (1974) 540. Значительное число источников помех является результатом перемещения электродов и соединяющих их кабелей в геомагнитном поле Земли, т.е. электромагнитной индукции. Движение стимулируется колебаниями давления вдоль кабеля, в процессе его движения в воде, в результате которых он начинает вибрировать. Можно показать, что для длинного кабеля индуцированное движением напряжение пропорционально v5/2f2, где v и f являются соответственно скоростью буксирования и частотой сигнала. Частоты, которые используются в подводных коммуникационных антеннах, составляют около 60 Гц, и в результате зависимости уровня помех от частоты сигнала, с возникающей помехой можно бороться. Однако для частот, наиболее часто используемых при исследовании гидрокарбонатов, которые приблизительно равны 0,4-0,8 Гц, с индуцируемыми помехами трудно бороться. Используя формулу, полученнуюBurroughs и раскрытую в предшествующих IEEE публикациях, ожидаемый уровень помех должен быть порядка 0,3 V/Гц 1/2 м на представляющих интерес частотах и при скорости буксирования, равной 5 узлам. Такой уровень помех неприемлемо высок по отношению к ожидаемым напряжениям, которые должны измеряться при обычной электромагнитной съмке. Другими значительными источниками помех являются электродные шумы, помехи, связанные с движением воды, и термальные шумы. Электродные шумы возникают в результате движения воды, нарушающего электрохимический двойной слой на поверхности электрода. Помехи, вызванные движением воды, могут быть связаны с индукцией в геомагнитном поле в результате водной турбулентности. Термальные шумы будут всегда присутствовать, если существует температурный градиент в непосредственной близости около электродов. Таким образом, существует потребность в создании установки для сбора данных электромагнитной съмки, которая может буксироваться в воде аналогично системе сейсмических кос, с целью повышения скорости и эффективности сбора данных электромагнитной съмки. Такая установка должна быть сконструирована таким образом, чтобы свести к минимуму помехи, которые могут индуцироваться на датчиках как в результате перемещения воды мимо датчиков, так и в результате отклонения движения датчиков от направления буксировки. Сущность изобретения В наиболее общем смысле изобретение предлагает детекторную установку для системы морской электромагнитной съмки, которая содержит корпус, выполненный с возможностью минимизации турбулентности в процессе буксирования корпуса в водной массе, и минимизации движения корпуса в любом направлении, отличном от направления буксирования. Корпус содержит связанный с ним датчик для измерения электрического или магнитного поля. В другом аспекте изобретение предлагает детекторную установку для системы морской электромагнитной съмки. Детекторная установка, в соответствии с этим аспектом изобретения, содержит корпус по существу из электрически непроводящего материала. Корпус выполнен с обеспечением поверхности для размещения электрода по существу в ламинарном потоке воды в процессе движения корпуса в воде. Форма корпуса обеспечивает минимальное сопротивление потоку воды. Крылья соединены с корпусом и выступают от него наружу. Форма крыльев стабилизирует движение корпуса в воде, при этом каждое крыло имеет место крепления для буксировочного кабеля. Крылья расположены симметрично относительно корпуса. Детекторная установка содержит электрод, расположенный на указанной поверхности корпуса. Электрод изготовлен из электрически проводящего, по существу неметаллического материала. В одном из вариантов реализации изобретения корпус имеет внутреннюю камеру, в которой расположен схемный блок для измерения напряжений. В другом аспекте изобретение предлагает систему морской электромагнитной съмки. Система электромагнитной съмки, в соответствии с этим аспектом настоящего изобретения, содержит исследовательское судно для буксирования кабеля в водной массе. Исследовательское судно имеет оборудование для пропускания тока через питающие электроды. Оборудование содержит регистрирующую аппаратуру для записи сигналов, соответствующих напряжениям, которые выделяются, по меньшей мере,между одной парой детекторных установок. Система содержит по меньшей мере два питающих электрода, расположенных в выбранных местах на кабеле, и по меньшей мере одну пару детекторных установок,прикреплнных сзади в хвостовой части кабеля. Каждая детекторная установка содержит корпус из по существу электрически непроводящего материала. Каждый корпус выполнен с обеспечением поверхно-2 012766 сти для размещения электрода в по существу ламинарном потоке воды в процессе движения корпуса в воде. Форма каждого корпуса обеспечивает минимальное сопротивление потоку воды. Каждая детекторная установка содержит крылья, соединенные с соответствующим корпусом и выступающие от него наружу. Форма крыльев обеспечивает стабилизацию движения соответствующего корпуса в воде, при этом каждое крыло имеет место крепления для буксировочного кабеля. Крылья расположены симметрично относительно корпуса. Каждая детекторная установка содержит электрод, расположенный на указанной поверхности. Электрод изготовлен из электрически проводящего, по существу, неметаллического материала. В одном из вариантов реализации изобретения каждый корпус имеет внутреннюю камеру, в которой расположен схемный блок для измерения напряжений. В следующем аспекте настоящее изобретение предлагает способ проведения морской электромагнитной съмки. Способ, в соответствии с этим аспектом настоящего изобретения, включает перемещение генератора источника поля в водной массе. В заданные интервалы времени электрический ток пропускают через генератор источника поля, который индуцирует в геологических формациях под водной массой, по меньшей мере, одно из магнитного и электрического полей, изменяющихся во времени. По меньшей мере, один датчик перемещают в водной массе в направлении буксирования. При помощи датчиков выделяют по меньшей мере одно из магнитного и электрического полей, возникающих в результате взаимодействия индуцированного поля с геологическими формациями. Перемещение осуществляют таким образом, чтобы минимизировать турбулентность в воде и минимизировать движение датчика в направлениях, отличных от направления буксирования. Другие аспекты и преимущества изобретения будут очевидны из последующего описания и формулы изобретения. Перечень чертежей На фиг. 1 показан один из вариантов системы электромагнитной съмки в соответствии с настоящим изобретением; на фиг. 2 приведен один из вариантов электрода, используемого в системе для съмки в соответствии с настоящим изобретением; на фиг. 3 показан один из вариантов регистрирующих и телеметрических схем, которые могут быть использованы в различных вариантах реализации настоящего изобретения; на фиг. 4 иллюстрируется один из вариантов соединения для прикрепления детекторных установок к связанным с ними буксировочным кабелям на хвостовом части кабеля, буксируемого исследовательским судном; на фиг. 5 иллюстрируется альтернативный вариант системы сбора данных, в которой антенна используется как передающий элемент, и детекторная установка имеет магнитные датчики; на фиг. 6 показан альтернативный вариант регистрирующих схем, имеющий магнитометры. Сведения, подтверждающие возможность осуществления изобретения В описании изобретения термин "детекторная установка" будет использован для обозначения прибора, буксируемого на кабеле исследовательским судном или другим кораблм, причем прибор содержит один или большее количество датчиков для выделения одного или нескольких аспектов взаимодействия электромагнитных полей с глубинными геологическими формациями в Земле. Электромагнитные поля детекторной установки могут быть индуцированы в геологических формациях генерированием переменного во времени электрического поля или переменного во времени магнитного поля в толще воды на заданной глубине ниже водной поверхности. Обычно один или более датчиков могут быть гальваническими электродами, расположенными на корпусе, или датчиками магнитного поля, размещнными внутри корпуса. Корпус сконструирован таким образом, чтобы минимизировать водную турбулентность в процессе буксирования корпуса в толще воды, а также минимизировать любые отклонения движения корпуса от направления буксировки. Один из вариантов системы для морской электромагнитной съмки с управляемым источником, в соответствии с настоящим изобретением, показан на фиг. 1. В варианте на фиг. 1 электромагнитное поле вводится в геологические формации путм генерирования переменного во времени электрического поля на заданной глубине ниже водной поверхности. В настоящем изобретении электрическое поле генерируется пропусканием электрического тока через пару разнесенных питающих электродов. На фиг. 1 исследовательское судно 10 двигается по поверхности водного объекта 11, которым может быть озеро или океан. Исследовательское судно 10 может содержать электронные приборы, показанные совместно как"приборный блок" 12 для введения питающего электрического тока в геологические формации 20 под донной поверхностью 21 через различные электроды. Оборудование в приборном блоке 12 может также содержать аппаратуру для выделения и регистрации сигналов, соответствующих напряжениям, выделяемых на одной или нескольких парах детекторных установок 18, каждая такая детекторная установка имеет, по меньшей мере, один электрод (показан на фиг. 2). Оборудование в приборном блоке 12 может также содержать аппаратуру (не показана отдельно) для определения геодезического положения судна 10 и различных детекторных установок 18 в системе. Электроды в детекторных установках 18 будут более детально рассмотрены ниже при ссылке на фиг. 2.-3 012766 В настоящем варианте изобретения электрический питающий ток вводится через дипольную пару питающих электродов 16 А, 16 В, разнесенных друг от друга на выбранное расстояние. Выбранное расстояние будет зависеть, помимо других факторов, от глубины залегания геологических формаций 20,которые являются предметом исследований, и их ожидаемого сопротивления. Питающие электроды 16 А,16 В могут буксироваться соответствующим разведочным кабелем 14, который развртывается исследовательским судном 10 или другим кораблм. Разведочный кабель 14 может содержать электрические проводники (не показаны отдельно) для передачи питающего электрического тока от приборного блока 12 к питающим электродам 16 А, 16 В и передачи на приборный блок 12 сигналов, создаваемых напряжением на электродных парах на различных детекторных установках 18, в соответствии с приведенным ниже описанием. Конструкция питающих электродов 16 А, 16 В известна в геофизике. Питающие электроды 16 А, 16 В, показанные на фиг. 1, представляют собой горизонтальный электрический диполь. В других вариантах реализации питающие электроды могут иметь вид вертикального электрического диполя. В настоящем варианте разведочный кабель 14 может содержать на свом хвостовом конце переходное соединение и телеметрический блок, которые показаны в общем блоке 18 А. Переходное соединение и телеметрический блок 18 А в настоящем варианте создают механическое и электрическое соединение между хвостовым концом разведочного кабеля 14 и детекторным кабелем 18 С, буксирующим две или несколько детекторных установок 18. Детекторные установки 18 могут быть расположены вдоль детекторного буксировочного кабеля 18 С в разнесенных точках, как показано на фиг. 1. Буксировочные кабели 18 С в других вариантах могут быть непосредственно соединены с судном 10. Количество детекторных установок 18 и расстояние между ними, применяющиеся в каких-либо конкретных вариантах реализации системы электромагнитной съмки, будут зависеть, помимо других факторов, от требуемого разрешения результатов съмки, и сопротивления геологических формаций 20 в Земле. Детекторные установки 18 могут буксироваться исследовательским судном 10, как показано на фиг. 1, или буксироваться другим кораблм. Переходное соединение и телеметрический блок 18 А могут также содержать схемы(не показаны на фиг. 1) для преобразования сигналов, которые создаются выделенным напряжением,переданным от различных детекторных установок 18, в электрический или оптический телеметрический формат для передачи на приборный блок 12, или могут быть простым механическим и электрическим соединением между разведочным кабелем 14 и детекторными буксировочными кабелями 18 С. Дополнительно или альтернативно переходное соединение и телеметрический блок 18 А могут содержать схемы(не показаны) для локальной записи сигналов, соответствующих выделенным напряжениям. При работе устройства, показанного на фиг. 1, в процессе движения исследовательского судна 10 в водном объекте 11, в приборном блоке создатся питающий электрический ток, который передатся на питающие электроды 16 А, 16 В. Если система предназначена для измерения переходных электромагнитных процессов, то в качестве электрического тока может использоваться переключающийся постоянный ток, постоянный ток разной полярности, а также дискретно переключаемая последовательность, такая как, например, бинарная псевдослучайная последовательность. Если система используется для измерения электромагнитных эффектов в частотной области, то электрическим током может быть переменный ток, имеющий одну или несколько частот в диапазоне от 0,1 до 100 Гц. Форма переменного тока может быть синусоидальной, треугольной, прямоугольной или другой периодической волновой формой. Во время или после подачи тока на питающие электроды 16 А, 16 В (в зависимости от того, измеряется ли переходный процесс или эффекты в частотной области) измеряется напряжение между выбранными парами детекторных установок 18. Измерения, соответствующие амплитуде и/или фазе индуцируемого напряжения (фаза относительно электрического тока, передаваемого через питающие электроды 16 А,16 В), и/или амплитуды относительно времени переключения тока, затем используются для заключения о структуре и/или составе геологических формаций 20. Детекторные установки 18 могут буксироваться на одинаковой глубине с питающими электродами 16 А, 16 В или на другой глубине. Один из вариантов реализации детекторной установки 18 более детально показан на фиг. 2. Детекторная установка 18 может содержать корпус 32, как правило, имеющий форму торпеды, предпочтительно изготовленный из стекловолокна, армированного пластиком или аналогичным высокопрочным, непроводящим электричество и устойчивым к коррозии материалом. Корпус 32 может содержать, как правило, тупую, округленную носовую часть 31, с адекватно расположенным на ней чувствительном элементе, которым в этом варианте является электрод 30. Электрод 30 может быть изготовлен из графита или другого проводящего электричество неметаллического материала, чтобы избежать любых изменений его электрического импеданса, вызванного коррозией, которая появилась бы на многих металлах, если бы их использовали в электродах 30. В процессе движения корпуса 32 в воде его носовая часть 31 будет,как правило, располагаться в области ламинарного потока воды. Поэтому расположенный таким образом электрод 30 будет менее чувствителен к вносимым электрическим помехам, которые создаются турбулентностью воды. Корпус 32 может содержать среднюю секцию 40, как правило, эллиптической формы, и заднюю секцию 42, обычно конической формы. Форму различных секций (носовой части 31, средней секции 40 и задней секции 42) корпуса 32 предпочтительно выбирать такими, чтобы корпус 32 мог двигаться в воде(водном объекте 11 на фиг. 1) с минимальным гидродинамическим сопротивлением, обеспечивая, насколько это практически возможно, наименьшую турбулентность в воде, и создавая такую поверхность для электрода 30, чтобы он находился по существу в ламинарном потоке воды. Движение корпуса 32 в воде может быть стабилизировано присоединением стабилизаторов, как правило, в форме крыльев 34, в соответствующих местах вдоль корпуса 32. Крылья 34 могут быть прикреплены к корпусу 32 или могут быть изготовлены как одно целое с ним. Удалнный конец каждого крыла 34 может также быть местом, где детекторные буксировочные кабели 18 С соединяются с корпусом 32. Как показано на фиг. 2, детекторные буксировочные кабели 18 С могут быть прикреплены к удалнным концам крыльев 34, таким образом, чтобы проходить, как правило, параллельно друг другу в направлении движения детекторных буксировочных кабелей 18 С. Крылья 34 предпочтительно размещать симметрично относительно корпуса 32, на его противоположных сторонах. Хотя показанные на фиг. 2 детекторные буксировочные кабели 18 С разделены по горизонтали, они могут быть также разделены по вертикали. Как будет показано далее со ссылкой на фиг. 3, горизонтальное разделение буксировочных кабелей 18 С может уменьшить индукционные помехи, создаваемые при движении электрически соединнных буксировочных кабелей 18 С в геомагнитном поле Земли. Корпус 32 может также содержать два или более, как правило, симметрично расположенных по окружности стабилизаторов 44 возле хвостовой части корпуса 32. Крылья 34 и стабилизаторы 44 могут быть изготовлены как одно целое с корпусом 32 или отдельно изготовлены и прикреплены к корпусу 32. Комбинация крыльев 34 и стабилизаторов 44 дат возможность корпусу 32 двигаться в воде с высокой стабильностью в направлении буксирования. Высокая стабильность при движении в заданном направлении, помимо других возможных преимуществ, может уменьшить количество помех, индуцируемых в буксировочных кабелях 18 С в результате несоответствующего движения буксировочного кабеля 18 С по отношению к геомагнитному полю Земли. Корпус 32 может быть также изготовлен с размещением в нм одной или более герметичных камер 33, содержащих масло или аналогичные электрически непроводящие, практически несжимаемые жидкости. Общий объм камер и плотность такой жидкости (определение замкнутого объма этой полости будет рассмотрено далее) выбирается таким образом, чтобы обеспечить практически нейтральную плавучесть в воде корпуса 32. Корпус 32 может быть также изготовлен с размещением в нм герметичной внутренней полости 35,в которой могут быть расположены соответствующие усилительные и телеметрические схемы, показанные в одном схемном блоке 36. Схемный блок 36 используется для выделения сигналов, передаваемых через электроды 30 и аналогичные электроды в одной из других детекторных установок 18, расположенных вдоль детекторных буксировочных кабелей 18 С. Схемный блок 36 может быть электрически соединн с каждым из детекторных буксировочных кабелей 18 С соответствующей проводкой, показанной под цифрой 38. Схемный блок 36 и проводка 38 будут более детально рассмотрены при ссылке на фиг. 3. Настоящий вариант содержит два симметрично расположенных практически компланарных детекторных буксировочных кабеля 18 С, присоединнных к соответствующим местам крыльев 34 для выполнения нескольких целей. Во-первых, на схемы 36 может подаваться питание, и от схем 36 могут передаваться сигналы, при этом напряжения или другие представляющие его сигналы будут передаваться в детекторные буксировочные кабели 18 С по электрическим проводникам (смотри фиг. 4) практически симметрично, что позволит избежать влияния индуцированного паразитного напряжения на электродах 30. Во-вторых, размещение детекторных буксировочных кабелей 18 С, как показано на фиг. 2, будучи практически компланарным и симметричным относительно детекторных установок 18, может улучшить стабильность движения детекторных установок 18 в воде. Предпочтительно, чтобы детекторные буксировочные кабели 18 С имели минимально возможный диаметр для уменьшения влияния любой турбулентности, вызванной движением детекторных буксировочных кабелей в воде. Кроме того, использование двух детекторных буксировочных кабелей позволит существенно ослабить любые напряжения, которые могут индуцироваться в детекторных буксировочных кабелях 18 С в результате любой нестабильности движения детекторных установок 18 и детекторных буксировочных кабелей 18 С в геомагнитном поле Земли, как уже было показано выше. Предпочтительно, чтобы детекторные буксировочные кабели 18 С были максимально тонкими по отношению к тяговым усилиям, необходимым для перемещения буксировочных кабелей 18 С, не только для уменьшения гидродинамического сопротивления, в соответствии с приведенными выше соображениями, но и увеличения частоты любой вызванной турбулентностью вибрации в буксировочных кабелях 18 С. Кроме того, использование тонких буксировочных кабелей минимизирует их массу, и таким образом минимизирует любое влияние буксировочных кабелей 18 С на движение детекторных установок 18. Вариант, показанный на фиг. 1, содержит детекторные установки, расположенные таким образом,что напряжение измеряется между горизонтальными электродными парами. В других вариантах при измерении напряжения одна или несколько детекторных установок могут быть расположены вертикально или в другой ориентации с использованием отдельных буксировочных кабелей и соответствующих конструкций для сохранения относительного положения различных детекторных установок. Один из вариантов схемного блока 36 показан схематически на фиг. 3. Схемный блок 36 может со-5 012766 держать инвертор 140, на который поступает электрическая энергия по проводникам в детекторных буксировочных кабелях (18 С на фиг. 2) через соответствующие симметричные соединения, такие как электрические проводники 140 А, 140 В в электропроводке 38. В предпочтительном варианте напряжение постоянного тока (DC) подводится через проводники 140 А и 140 В, а инвертор 140 является DC-DC преобразователем. В альтернативном варианте энергия переменного тока (АС) подводится к инвертору 140 предпочтительно на относительно высоких частотах, 500 Гц или выше, чтобы избежать появления индуцированного выделяемого напряжения на электродах (в установке 18 на фиг. 2), и инвертор 140 являетсяAC-DC преобразователем. Инвертор 140 может подавать соответствующую электрическую энергию на предусилитель 142, аналого-цифровой преобразователь (ADC) 144 и телеметрический приемопередатчик 146. Предусилитель 142 имеет один входной терминал, электрически соединнный с электродом (30 на фиг. 2). Другой входной терминал предусилителя может быть электрически присоединн, например, через проводники 142 А, 142 В к одному из выбранных электродов (в установке 18 на фиг. 2), расположенных вдоль детекторных буксировочных кабелей (18 С на фиг. 2). Выходной сигнал предусилителя 142 может быть оцифрован в ADC 144 и передан на телеметрический примопередатчик 146 для подключения к любой соответствующей телеметрической схеме. Телеметрический примопередатчик может быть электрически соединн с соответствующими проводниками 146 А, 146 В в электропроводке 38. Различные проводники 142 А, 142 В, 146 А, 146 В соединены с соответствующими проводниками в детекторных буксировочных кабелях 18 С, как будет рассмотрено более детально ниже при ссылке на фиг. 4. В некоторых вариантах управляющий сигнал может передаваться на телеметрический примопередатчик 146 (обычно от приборного блока 12 на фиг. 1) для селективного присоединения одного входного терминала предусилителя 142 к проводникам 142 А, 142 В для того, чтобы напряжение на вход предусилителя 142 подавалось от выбранных детекторных установок (18 на фиг. 1), расположенных вдоль детекторных буксировочных кабелей (18 С на фиг. 1). Таким образом, в этих вариантах можно выбирать расстояние между детекторными установками с размещнными в них электродами. Один из вариантов переходного соединения и телеметрического блока 18 А показан схематически на фиг. 4. Блок 18 А содержит герметичный, устойчивый к давлению корпус 118 А, изготовленный из стали или других высокопрочных материалов. Корпус 118 А содержит передающие нагрузку устройства 114 А для соединения с одним или несколькими силовыми элементами 14 А в разведочном кабеле 14 на его хвостовом конце. Передающие нагрузку устройства 114 А передают натяжение, вносимое силовыми элементами 14 А, на корпус 118 А. Желательно, чтобы конструкция корпуса 118 А обеспечивала герметичное подключение разведочного кабеля 14 к корпусу 118 А. Электрические и/или оптические проводники, формирующие часть жгута проводов 14 В, проходят через отверстия во внутреннюю часть корпуса 118 А и оперативно соединяют соответствующие силовые проводники 118 С и телеметрические проводники 218 С в каждом из детекторных буксировочных кабелей 18 С. Каждый детекторный буксировочный кабель 18 С может содержать водоупорный внешний кожух 518 С, приспособленный для герметичного подключения к корпусу 118 А, чтобы исключить проникновение воды во внутреннюю полость корпуса 118 а и каждого кабеля 18 С. Каждый детекторный буксировочный кабель может содержать силовой элемент 318 С, желательно изготовленный из волокнистого троса, такого как волокнистый трос, реализуемый под зарегистрированным товарным знаком VECTRAN, принадлежащим Hoescht Celanese Corp., NewYork, New York. Каждый силовой элемент 318C соединн с соответствующим передающим нагрузку устройством 418 С в корпусе 118 А для передачи растягивающей нагрузки от корпуса 118 А на каждый детекторный буксировочный кабель 18 С. Как уже отмечалось выше, известные в геофизике электромагнитные исследования включают воздействие переменного во времени магнитного поля на геологические формации и выделение магнитных полей, возникающих в результате взаимодействия вводимых изменяющихся во времени полей с различными глубинными геологическими формациями. Другой вариант системы, в которой для этих целей, в соответствии с настоящим изобретением, содержатся приборы для генерирования и регистрации магнитного поля, приведен на фиг. 5. На фиг. 5 показано исследовательское судно 10, имеющее приборный блок 12 и двигающееся в водном объекте 11, аналогично рассмотренному выше случаю при ссылке на фиг. 1. Судно 10 тянет соответствующий разведочный кабель 14 в водном объекте 11. В настоящем варианте рамочная антенна 17 буксируется на конце разведочного кабеля 14. Рамочная антенна 17 может быть присоединена к аналогичному источнику питающего электрического тока в приборном блоке 12,как уже обсуждалось при ссылке на фиг. 1. В варианте, приведенном на фиг. 5, при пропускании тока через рамочную антенну 17 индуцируется магнитное поле. Антенна 17, как показано на фиг. 5, создат вертикальный магнитный диполь, однако и другие ориентации магнитного диполя могут быть использованы в других вариантах реализации данного изобретения. На хвостовом конце антенны 17 переходное соединение и телеметрический блок 18 А, аналогичные рассмотренным при ссылке на фиг. 4, могут быть использованы для присоединения конца разведочного кабеля 14 к буксировочным кабелям 18 С практически таким же способом, как и в рассмотренном случае при ссылке на фиг. 4. Буксировочный кабель 18 С присоединяется по меньшей мере к одной детекторной установке 118, но предпочтительнее присоединение к нескольким таким детекторным установкам, рас-6 012766 положенным отдельно друг от друга вдоль буксировочных кабелей (аналогичных показанным на фиг. 1). Детекторная установка 118 на фиг. 5 может содержать один или несколько чувствительных к магнитному полю элементов (магнитометров), а также может содержать или не содержать гальванические элементы, рассмотренные при ссылке на фиг. 2. Конструкция детекторной установки 118 практически аналогична конструкции, рассмотренной при ссылке на фиг. 2, в частности, содержит корпус, который позволяет свести к минимуму возникновение турбулентности и минимизировать отклонения от направления буксирования. Магнитометр, как будет показано ниже, выделяет магнитные поля, возникающие в результате взаимодействия генерируемого магнитного поля с геологическими формациями 20, и создат соответствующие сигналы, которые могут быть зарегистрированы в приборном блоке 12 или в другом месте для последующей интерпретации. Различные особенности выделенных магнитных полей используются для составления заключения о структуре и составе различных геологических формаций 20. Если в настоящем изобретении используются магнитометры, то предпочтительнее, чтобы корпус детектора был изготовлен из практически немагнитного материала. Пластмассовые конструкции, рассмотренные при ссылке на фиг. 2, будут, несомненно, обладать такими свойствами. Если электроды не будут размещаться в какой-либо части детекторной установки 118, то ее корпус может быть (не обязательно) электрически проводящим, хотя он должен быть немагнитным. Материал типа монели может быть использован в этих вариантах реализации. Настоящий вариант детекторной установки 118 может содержать любые или все особенности корпуса, рассмотренного выше при ссылке на фиг. 2, которые позволяет свести к минимуму возникновение турбулентности и минимизировать отклонения от направления буксирования. Обращаясь к фиг. 6, видно, что схемный блок 136, который содержит один или более магнитометров, может быть использован в детекторной установке, как показано на фиг. 5. Большинство из компонент в схемном блоке 136 могут быть практически аналогичны устройствам в схемном блоке, рассмотренном выше при ссылке на фиг. 3, включая ADC 144, предусилитель 142, блок питания 140 и телеметрический примопередатчик 146. Настоящий вариант реализации может содержать один или несколько магнитометров, показанных как М 1, М 2, МЗ. Магнитометры М 1, М 2, М 3 могут быть индукционными приборами, которые используются при изучении геомагнитного поля Земли, или аналогичными устройствами. Магнитометры М 1, М 2, М 3 на фиг. 6 могут быть ориентированы в основном ортогонально по отношению друг к другу для удобства работы, или иметь другую ориентацию. Сигнальные выходы магнитометров М 1, М 2, М 3 подключены к соответствующим входным терминалам мультиплексора 147,включенного между ними и предусилителем 142. Мультиплексор 147 может содержать дополнительные входные терминалы, показанные как Е 1, присоединнные к одному или нескольким электродам, если они используются в каком-либо конкретном варианте реализации. В настоящем варианте в детекторной установке (118 на фиг. 5) могут быть использованы как электроды, рассмотренные при ссылке на фиг. 2,так и, по меньшей мере, один магнитометр. Настоящий вариант детекторной установки (118 на фиг. 5) может быть также использован с устройствами для генерирования электрических полей, показанных на фиг. 1. В таких вариантах реализации магнитометры М 1, М 2, М 3 выделяют магнитные поля, возникающие в результате взаимодействия изменяющегося во времени электрического поля с различными геологическими формациями (20 на фиг. 1). Независимо от конкретного варианта реализации, генерируются ли электрические поля и выделяются напряжения, или индуцируются и выделяются магнитные поля, а также при любой их комбинации, путм минимизации водной турбулентности и отклонений при движении детекторной установки от направления буксирования, будут сведены к минимуму помехи, индуцируемые на чувствительных элементах, что позволит ощутимо повысить возможность проведения электромагнитной съмки с движущимися детекторными установками. Такая технология съмки может повысить скорость и эффективность электромагнитных исследований. Хотя данное изобретение было рассмотрено для ограниченного числа вариантов его реализации,для специалиста, использующего приведенное здесь раскрытие, очевидна возможность других вариантов без выхода за рамки данного изобретения. Соответственно, рамки изобретения должны быть ограничены только прилагаемой формулой. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Детекторная установка для системы морской электромагнитной съмки, содержащая корпус из,по существу, электрически непроводящего материала с размещенным на нем электродом из электрически проводящего, по существу, неметаллического материала, причем при движении корпуса окружающий поток воды является, по существу, ламинарным, а также обеспечивается минимальное сопротивление потоку воды; крылья, соединенные с корпусом и выступающие от него наружу, выполненные с обеспечением стабилизации движения корпуса в воде, причем каждое крыло имеет место крепления для буксировочного кабеля, при этом крылья расположены симметрично относительно корпуса. 2. Установка по п.1, отличающаяся тем, что электрод выполнен с использованием графита. 3. Установка по п.1, отличающаяся тем, что корпус имеет внутреннюю камеру, в которой располо-7 012766 жен схемный блок для измерения напряжений. 4. Установка по п.3, отличающаяся тем, что схемный блок содержит схему для измерения напряжений, избирательно подключаемую к соответствующим электродам, принадлежащим двум из ряда детекторных установок, установленных на буксировочных кабелях в отстоящих друг от друга положениях. 5. Установка по п.1, отличающаяся тем, что корпус выполнен с использованием усиленного волокнистого пластика. 6. Установка по п.1, отличающаяся тем, что корпус содержит по меньшей мере два стабилизатора,которые прикреплены к корпусу вблизи задней секции и расположены на противоположных сторонах корпуса. 7. Установка по п.1, отличающаяся тем, что корпус содержит по меньшей мере один внутренний отсек, заполненный электрически непроводящей, по существу, несжимаемой текучей средой, причем объм отсека и плотность текучей среды выбраны из условия обеспечения, по существу, нейтральной плавучести корпуса в воде. 8. Система морской электромагнитной съмки, содержащая исследовательское судно для буксирования по меньшей мере одной пары отстоящих друг от друга детекторных установок, каждая из которых содержит корпус из, по существу, электрически непроводящего материала с размещенным на нем электродом из электрически проводящего, по существу, неметаллического материала, причем при движении корпуса окружающий поток воды является ламинарным, а также обеспечивается минимальное сопротивление потоку воды, причем каждая детекторная установка содержит крылья, соединенные с корпусом и выступающие от него наружу, выполненные с обеспечением стабилизации движения корпуса в воде, при этом каждое крыло имеет место крепления для буксировочного кабеля, и крылья расположены симметрично относительно корпуса; и два, по существу, компланарных параллельных буксировочных кабеля,буксируемых исследовательским судном каждый из которых присоединн к одному из указанных мест крепления на каждом корпусе, причем буксировочные кабели выполнены с возможностью передачи сигналов между двумя корпусами. 9. Система по п.8, отличающаяся тем, что электрод выполнен с использованием графита. 10. Система по п.8, отличающаяся тем, что корпус имеет внутреннюю камеру, в которой расположен схемный блок для измерения напряжений. 11. Система по п.10, отличающаяся тем, что схемный блок содержит схему для измерения напряжений, избирательно подключаемую к соответствующим электродам, принадлежащим двум из ряда детекторных установок, установленных на буксировочных кабелях в отстоящих друг от друга положениях. 12. Система по п.8, отличающаяся тем, что корпус выполнен с использованием усиленного волокнистого пластика 13. Система по п.8, отличающаяся тем, что корпус содержит по меньшей мере два стабилизатора,прикреплнных к корпусу вблизи задней секции и расположенных на противоположных сторонах корпуса. 14. Система по п.8, отличающаяся тем, что корпус содержит по меньшей мере один внутренний отсек, заполненный электрически непроводящей, по существу, несжимаемой жидкостью, причем объм отсека и плотность жидкости выбраны из условия обеспечения, по существу, нейтральной плавучести корпуса в воде. 15. Система по п.8, отличающаяся тем, что буксировочные кабели, присоединнные к каждой детекторной установке, по существу, компланарны и расположены симметрично относительно каждой детекторной установки. 16. Способ проведения морской электромагнитной съмки, в котором генератор электрического и/или магнитного поля перемещают в водной массе, пропускают электрический ток в заданные интервалы времени через указанный генератор и индуцируют им в геологических формациях под водной массой по меньшей мере одно из магнитного и электрического полей, изменяющихся во времени; перемещают по меньшей мере один датчик в водной массе в направлении буксирования и детектируют с использованием датчика по меньшей мере одно из магнитного и электрического полей, возникающих в результате взаимодействия индуцированного поля с геологическими формациями, при этом датчик перемещают таким образом, чтобы минимизировать турбулентность в воде и минимизировать движение датчика в направлениях, отличных от направления буксирования, путем приложения тяговых усилий к по меньшей мере двум крыльям, соединенным с корпусом, который содержит указанный датчик, и выступающим от него наружу, причем каждое крыло выполнено с обеспечением стабилизации движения корпуса в воде и имеет место крепления для буксировочного кабеля, при этом крылья расположены симметрично относительно корпуса, а диаметр буксировочного кабеля минимизирован по отношению к тяговым усилиям,прикладываемым к датчику. 17. Способ по п.16, отличающийся тем, что поле детектируют путем измерения напряжения между двумя датчиками, перемещающимися в воде на расстоянии друг от друга, причем каждый датчик перемещают таким образом, чтобы минимизировать турбулентность в воде и минимизировать движение датчика в направлениях, отличных от направления буксирования. 18. Способ по п.16, отличающийся тем, что поле детектируют путем измерения характеристик маг-8 012766 нитного поля. 19. Способ по п.16, отличающийся тем, что индуцирование поля включает индуцирование вертикального диполя магнитного поля. 20. Способ по п.16, отличающийся тем, что индуцирование поля включает индуцирование горизонтального диполя электрического поля.
МПК / Метки
МПК: G01V 3/165
Метки: система, электромагнитная, малошумная, подземных, геологических, буксируемая, исследований
Код ссылки
<a href="https://eas.patents.su/12-12766-maloshumnaya-buksiruemaya-elektromagnitnaya-sistema-dlya-podzemnyh-geologicheskih-issledovanijj.html" rel="bookmark" title="База патентов Евразийского Союза">Малошумная буксируемая электромагнитная система для подземных геологических исследований</a>
Способ построения геологических моделей подземных осадочных объёмов
Номер патента: 10285
Опубликовано: 29.08.2008
Авторы: Ли Дачан, Ван Вагонер Джон К., Хоял Дэвид К., Данн Пол А., Эввиллер Дэвид Н., Сунь Тао, Донофрио Крис Дж., Деффенбо Макс
МПК: G06T 17/20
Метки: осадочных, объёмов, моделей, способ, подземных, построения, геологических
Формула / Реферат:
1. Способ построения геологической модели подземного объема, содержащий этапы, при выполнении которых: (a) идентифицируют по меньшей мере одну контурную форму по меньшей мере одного геологического тела в подземном объеме на основании геологических данных, относящихся к подземному объему; (b) оценивают распределение зерен по размерам внутри по меньшей мере части по меньшей мере одного геологического тела, используя по меньшей мере одну контурную...
Каротажная система, спускаемая в колонну бурильных труб и способ бурения скважины с проведением в ней исследований с использованием такой системы
Номер патента: 2063
Опубликовано: 24.12.2001
Автор: Рюния Дауве Йоханнес
МПК: E21B 47/00
Метки: использованием, бурения, исследований, колонну, бурильных, системы, скважины, спускаемая, труб, ней, способ, проведением, каротажная, система
Формула / Реферат:
1. Система бурения ствола скважины в земной формации и проведения каротажа скважины, содержащая измерительный скважинный зонд и колонну бурильных труб, имеющую продольный канал, предназначенный для циркуляции по нему промывочного раствора при бурении, снабженную отверстием, обеспечивающим гидравлическую связь между каналом и наружным пространством по отношению к колонне бурильных труб, канал вместе с отверстием расположены таким образом, что...
Система и способ использования характеристик годографов для получения, обработки и отображения данных электромагнитных исследований с использованием управляемых источников во временной области
Номер патента: 11273
Опубликовано: 27.02.2009
Авторы: Ксиа Гейньюан, Томсен Леон А., Джонсон Дэниэл, Элледжэр Нормэн А., Джилек Петр, Дэллинджер Джозеф А.
МПК: G01V 3/38
Метки: обработки, временной, годографов, отображения, данных, электромагнитных, исследований, получения, характеристик, источников, управляемых, области, использованием, система, способ, использования
Формула / Реферат:
1. Способ геофизической разведки геологической среды, при котором проводят электромагнитную разведку заданной области геологической среды с получением множества трасс электромагнитных сигналов, используемых для получения отображения по меньшей мере части заданной области геологической среды, отличающийся тем, что проводят коррекцию по меньшей мере одной трассы электромагнитного сигнала для учета затухания и рассеяния на множестве различных...
Система низкотемпературного контроля для подземных барьеров
Номер патента: 11226
Опубликовано: 27.02.2009
Авторы: Винигар Харолд Дж., Маккинзи Билли Джон
МПК: G01K 11/32, E21B 47/12, E21B 47/06...
Метки: контроля, система, подземных, барьеров, низкотемпературного
Формула / Реферат:
1. Система, предназначенная для контроля температуры подземной низкотемпературной зоны, содержащей множество замораживающих скважин, содержащая один или более лазеров; оптоволоконный кабель, соединённый по меньшей мере с одним лазером, причём часть оптоволоконного кабеля расположена по меньшей мере в одной замораживающей скважине, и при этом по меньшей мере один лазер выполнен с возможностью передавать световые импульсы в первый конец...
Узел для геофизических исследований в скважине с использованием ядерного магнитного резонанса
Номер патента: 2814
Опубликовано: 31.10.2002
Автор: Рюниа Дауве Йоханнес
МПК: G01V 3/32
Метки: исследований, резонанса, геофизических, магнитного, ядерного, скважине, узел, использованием
Формула / Реферат:
1. Узел для проведения геофизических исследований в скважине, сформированной в земной формации, содержащий корпус, приспособленный для спуска по скважине и установки в заданной ее части, и устройство для проведения геофизических исследований в скважине с использованием ЯМР, содержащее магнит для индуцирования магнитного поля в выбранной зоне земной формации, антенну для передачи радиочастотных (РЧ) сигналов в выбранную зону и приема ответных РЧ...
Предыдущий патент: Способ контроля процесса и управления им
Следующий патент: Система и способ для нагрева углеводородсодержащего пласта
Случайный патент: Композиция для лечения или предотвращения сахарного диабета и ее применение