Способ и устройство для сооружения автоматически конгломерируемых конструкций
Формула / Реферат
1. Способ автоматического сооружения конгломерируемых конструкций, отличающийся тем, что он включает стадии
моделирования с помощью САПР конструкции сооружения, в частности, с функцией САПР моделирования поверхности или объемного моделирования, с получением компьютерного файла модели конструкции;
сечения указанного компьютерного файла модели конструкции горизонтальными параллельными плоскостями, в частности равноудаленными плоскостями с предварительно определенным шагом, для получения множества плоскостей поперечного сечения конструкции, включающих участки сплошного изображения и пустые участки, соответствующие сплошным и пустым частям конструкции, причем указанные плоскости сортируются снизу вверх;
подготовки, внутри ограждающих стен, образующих замкнутый периметр, аппарата, пригодного для поочередной укладки слоя зернистого материала и жидкого связующего;
перемещения указанного аппарата внутри указанного периметра для равномерной укладки первого горизонтального слоя зернистого инертного материала с толщиной, соответствующей указанному предварительно заданному шагу;
разбрызгивания первого слоя связующего с помощью указанного аппарата для воспроизведения первой плоскости из указанных плоскостей поперечного сечения с формированием слоя инертного материала и связующего только на указанных сплошных участках, причем указанный аппарат имеет рабочую головку, способную перемещаться в горизонтальной плоскости;
вертикального подъема указанного аппарата в соответствии с указанным шагом;
повторения стадии укладки зернистого инертного материала и повторения стадии разбрызгивания на него связующего по числу горизонтальных поперечных сечений конструкции, каждый раз для другой и следующей по вертикали плоскости поперечного сечения до завершения последнего слоя;
удаления инертного материала, который не был скреплен связующим и который накапливается внутри указанного периметра, с высвобождением неразъемной конструкции, точно воспроизводящей указанную модель конструкции.
2. Способ по п.1, в котором указанная стадия моделирования предусматривает стадию отрисовки оболочек указанной конструкции или ее участка с использованием множества элементарных объемов и, в частности, указанные единичные объемы выбирают из группы, состоящей из параллелепипедов, цилиндров, призм, сфер или их частей или комбинаций.
3. Способ по п.1, в котором указанные единичные объемы имеют вертикальные края или вертикальные образующие, параллельные вертикальным сторонам указанной конструкции, и имеют горизонтальные края, параллельные горизонтальным плоскостям указанной конструкции.
4. Способ по п.1, в котором указанный аппарат включает рабочую головку, направляемую на указанной горизонтальной плоскости с независимым перемещением или интерполированным перемещением в декартовых или полярных координатах.
5. Способ по п.1, в котором указанную смолу выбирают из группы, состоящей из эпоксидных смол; сшитого полиуретана.
6. Способ по п.1, в котором указанная смола имеет вязкость в интервале от 3 до 10 П, предпочтительно от 6 до 8 П, и обладает достаточной текучестью для проникновения между гранулами зернистого материала на глубину, соответствующую указанному шагу, достигая тем самым слоя ранее сформованного зернистого материала.
7. Способ по п.1, в котором указанный зернистый материал имеет гранулометрический состав в интервале от 0,1 до 2 мм, предпочтительно от 0,5 до 1,5 мм, благодаря чему он имеет величину максимальной эффективной пористости, обеспечивающую проникновение указанного связующего между уложенными гранулами до достижения слоя, уже обработанного на предыдущем цикле.
8. Аппарат для автоматического сооружения конгломерируемых конструкций, отличающийся тем, что включает
замкнутый периметр, образованный ограждающими стенами;
горизонтальную раму, пригодную для поддержания мостового крана, способного перемещать рабочую головку в горизонтальной плоскости, образованной указанной горизонтальной рамой внутри указанного периметра;
средства для приведения в действие указанной рабочей головки на указанной горизонтальной плоскости, параллельной указанному мостовому крану;
рамную конструкцию, имеющую по меньшей мере одну стойку, способную поддерживать указанную горизонтальную раму;
средства для перемещения указанной горизонтальной рамы в вертикальном направлении;
блок управления, способный управлять последовательностью операций до завершения указанной конструкции;
где указанные ограждающие стены способны удерживать указанный инертный материал в рабочем пространстве, имеющем больший размер, чем указанная конгломерируемая конструкция.
9. Аппарат по п.8, в котором указанная рабочая головка включает нож, предназначенный для скольжения по уложенному инертному материалу для его разравнивания для достижения предварительно заданной толщины на всем рабочем пространстве.
10. Аппарат по п.8, в котором указанные ограждающие стены являются вертикальными и образуют параллелепипед или цилиндрический объем в указанном рабочем пространстве.
11. Аппарат по п.8, в котором предусмотрено покрытие для создание крыши над указанными ограждающими стенами.
12. Аппарат по п.11, в котором указанное покрытие способно герметично закрывать указанный объем таким образом, чтобы внутри мог быть создан вакуум.
13. Аппарат по п.8, в котором указанная рабочая головка включает по меньшей мере одно разбрызгивающее сопло связующего, приводимое в действие управляемым электрическим клапаном; головку предварительного смешения; подающий насос; резервуар; промывную систему.
14. Аппарат по п.8, в котором указанная рабочая головка включает объемный дозатор для подачи в указанную рабочую головку определенного количества инертного материала для каждого рабочего хода.

Текст
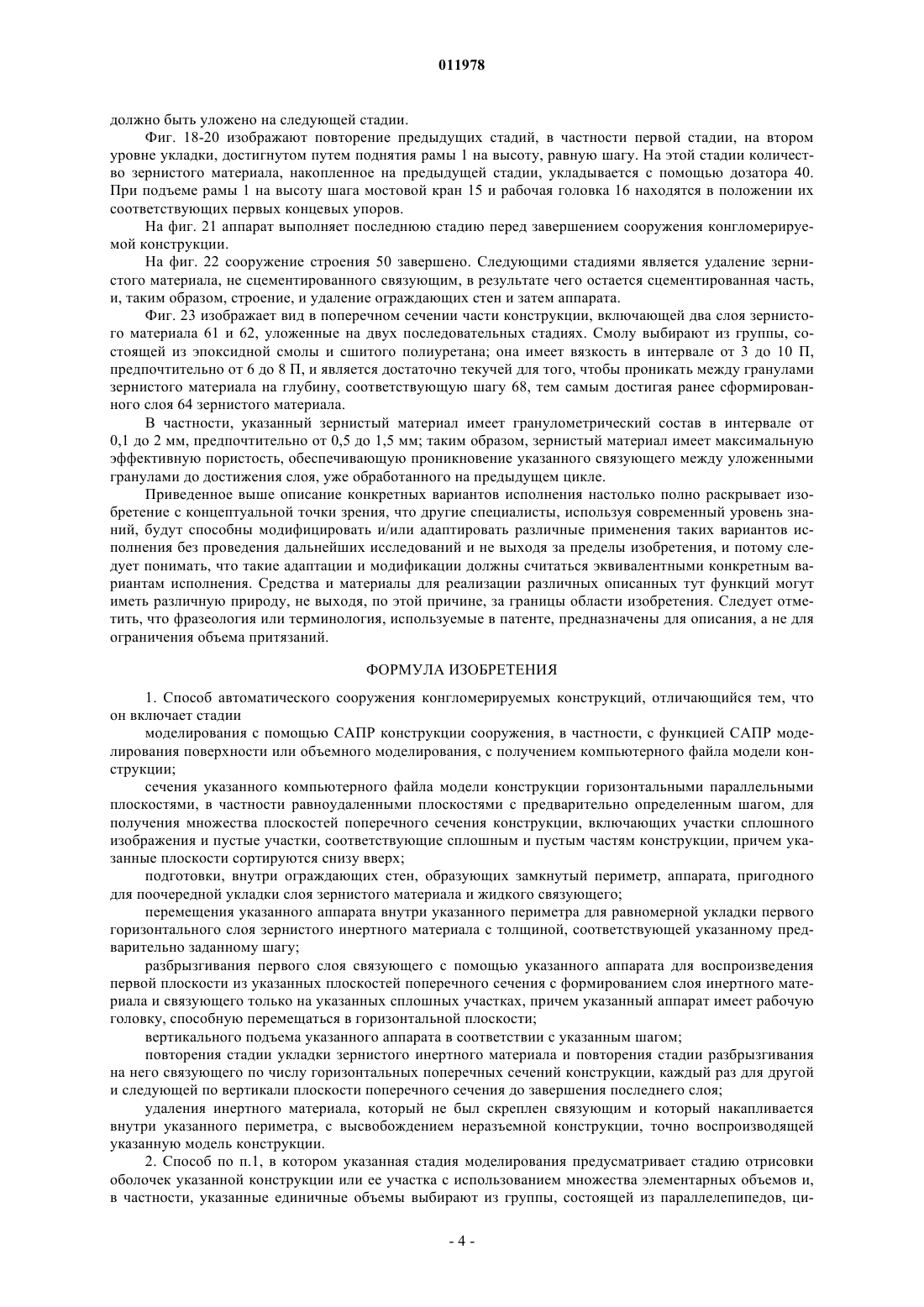
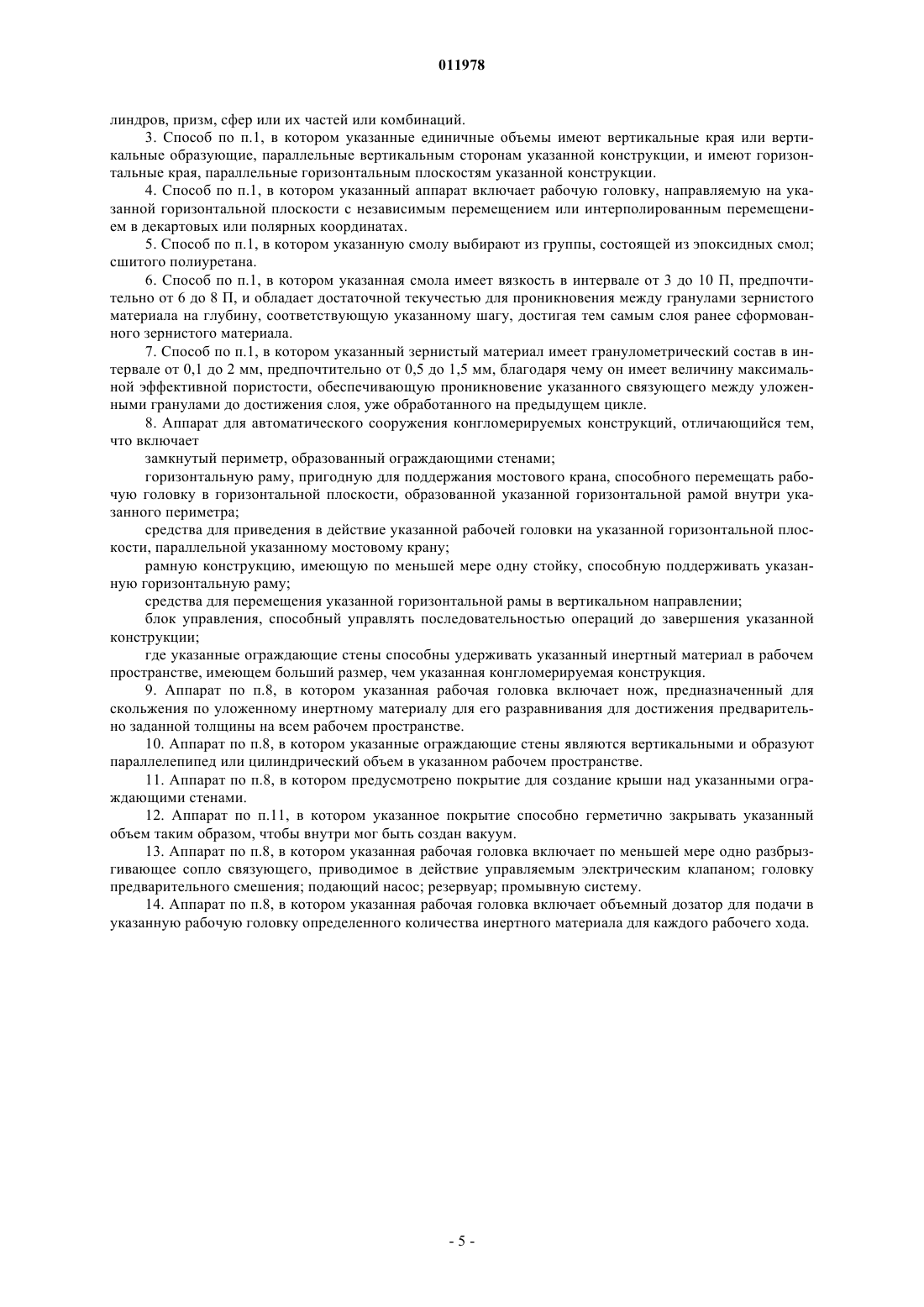
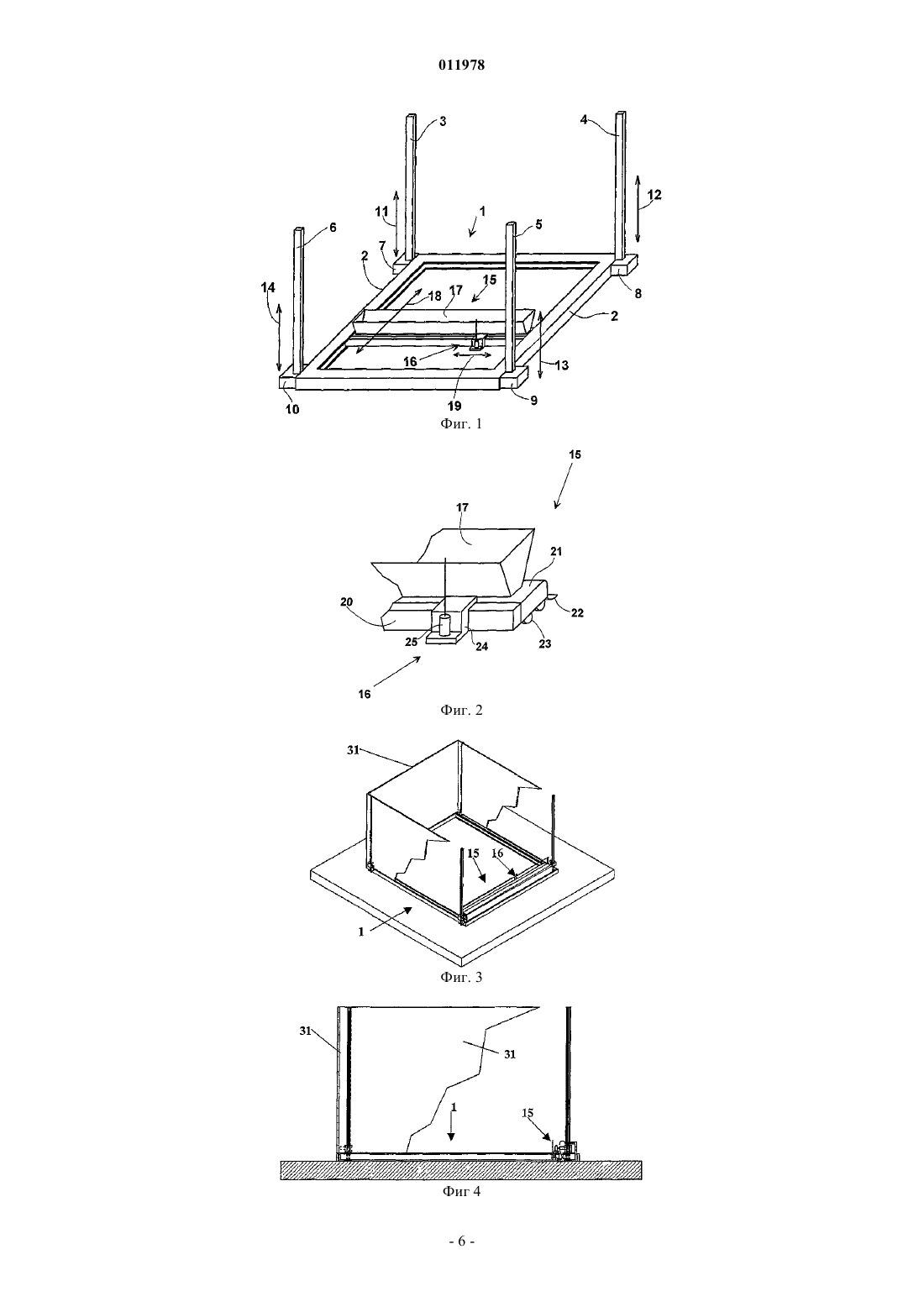
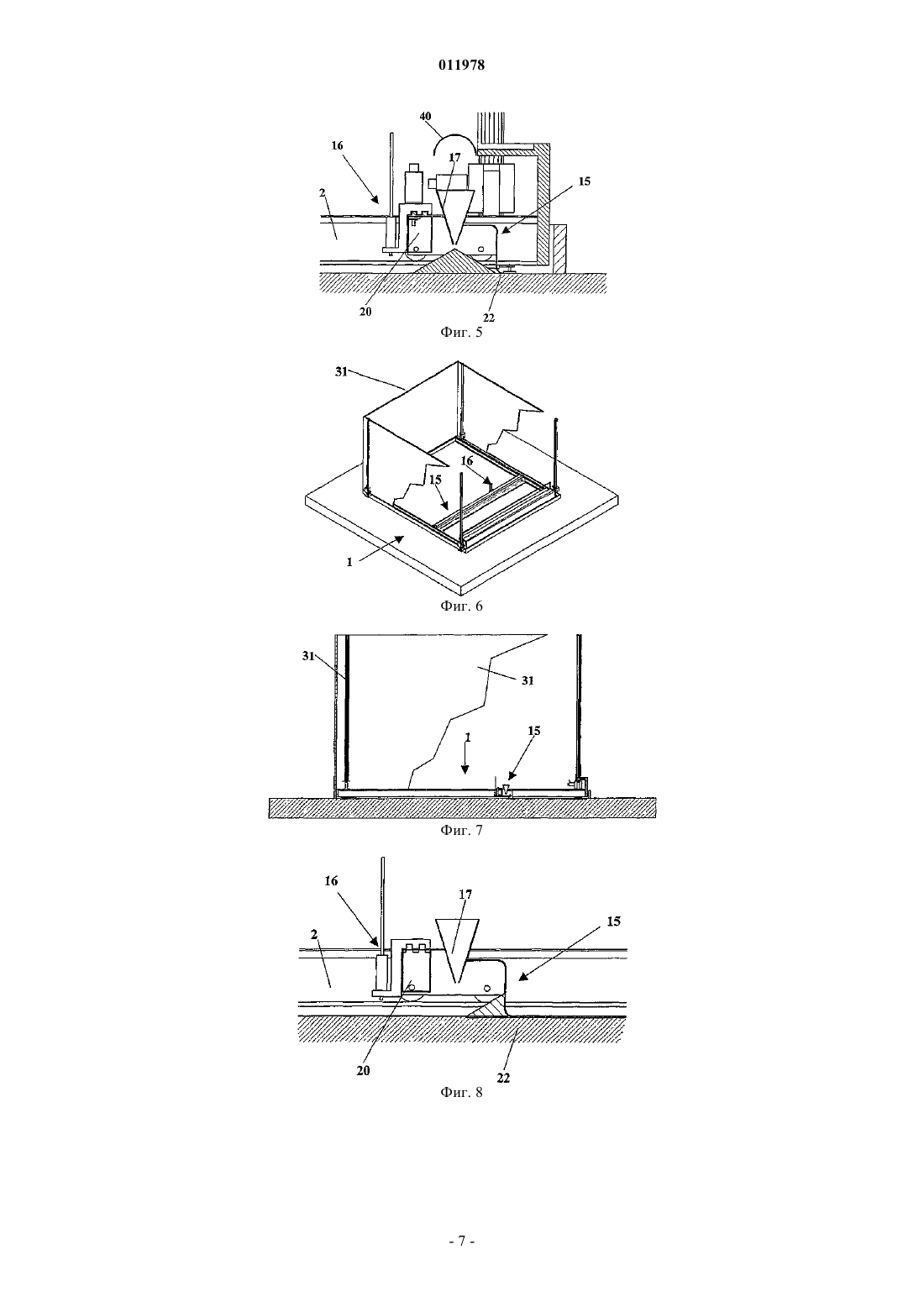
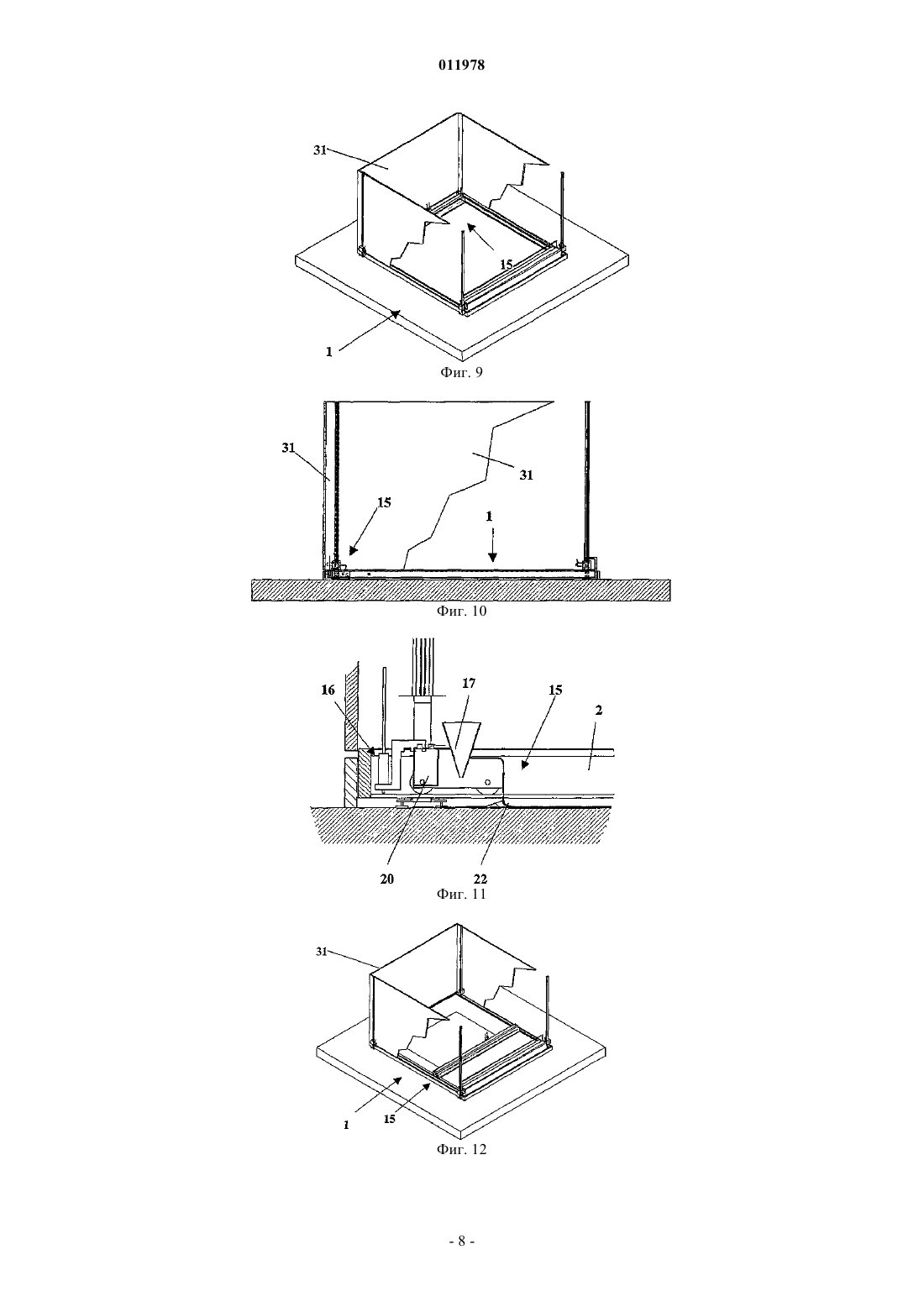
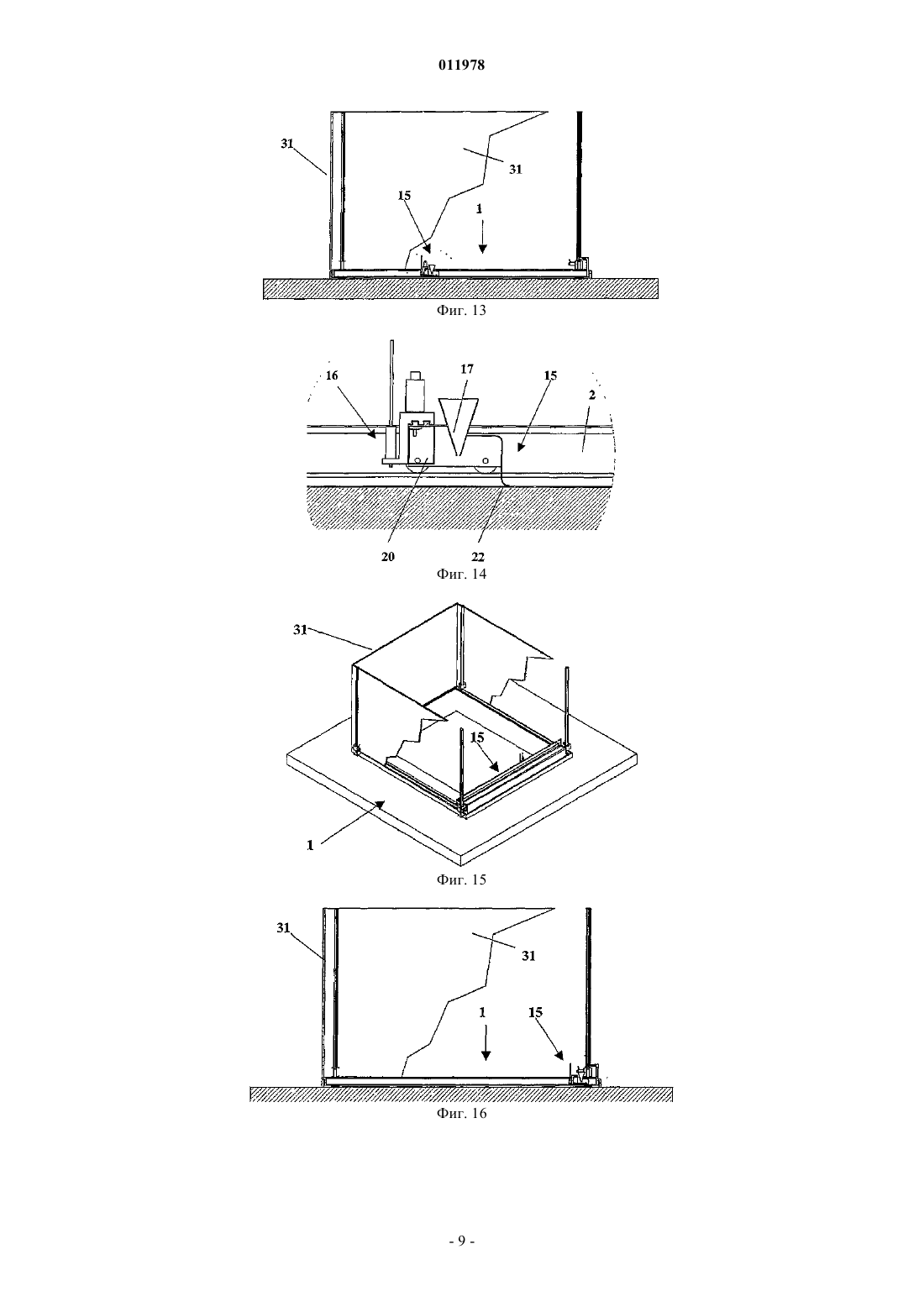
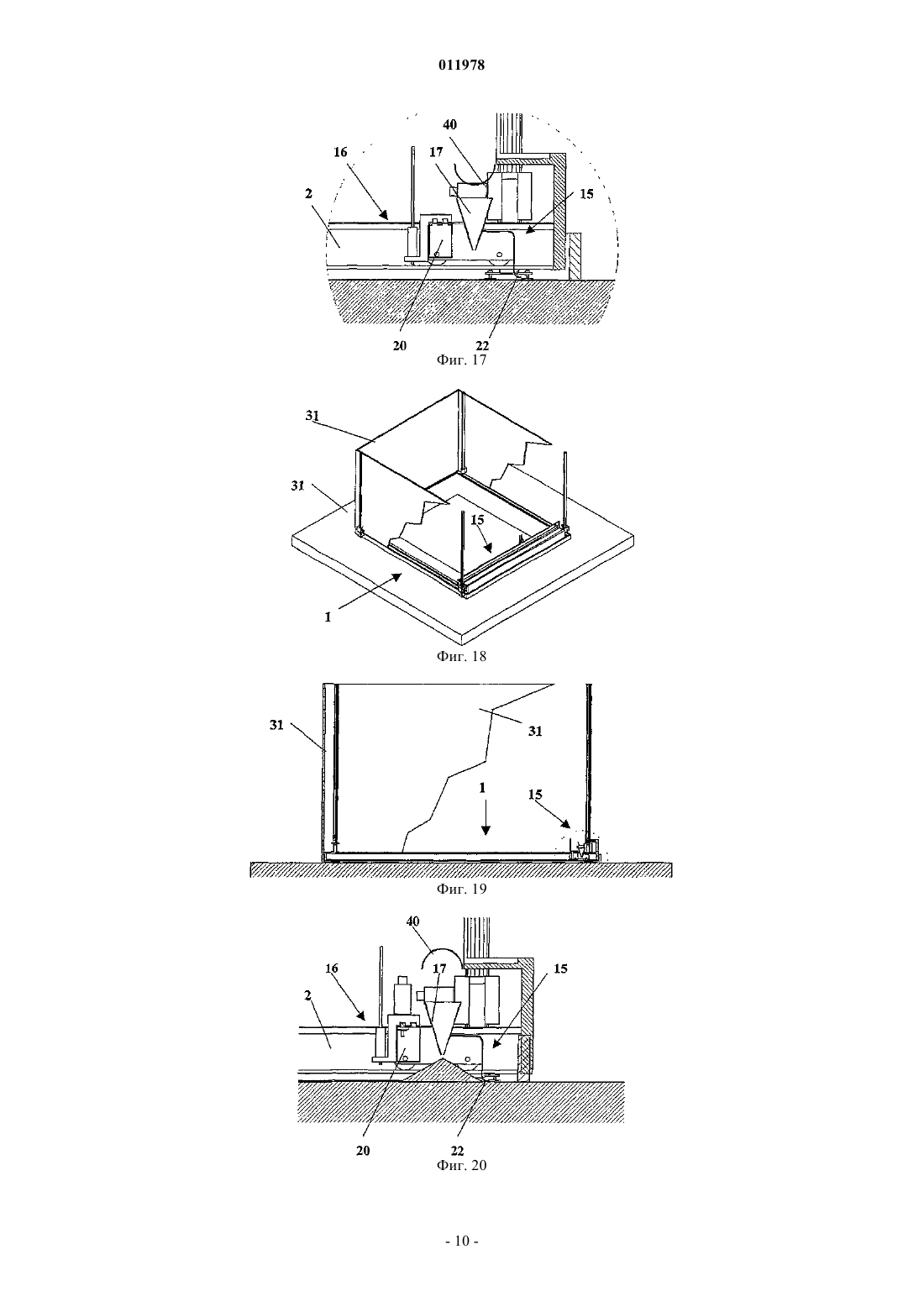
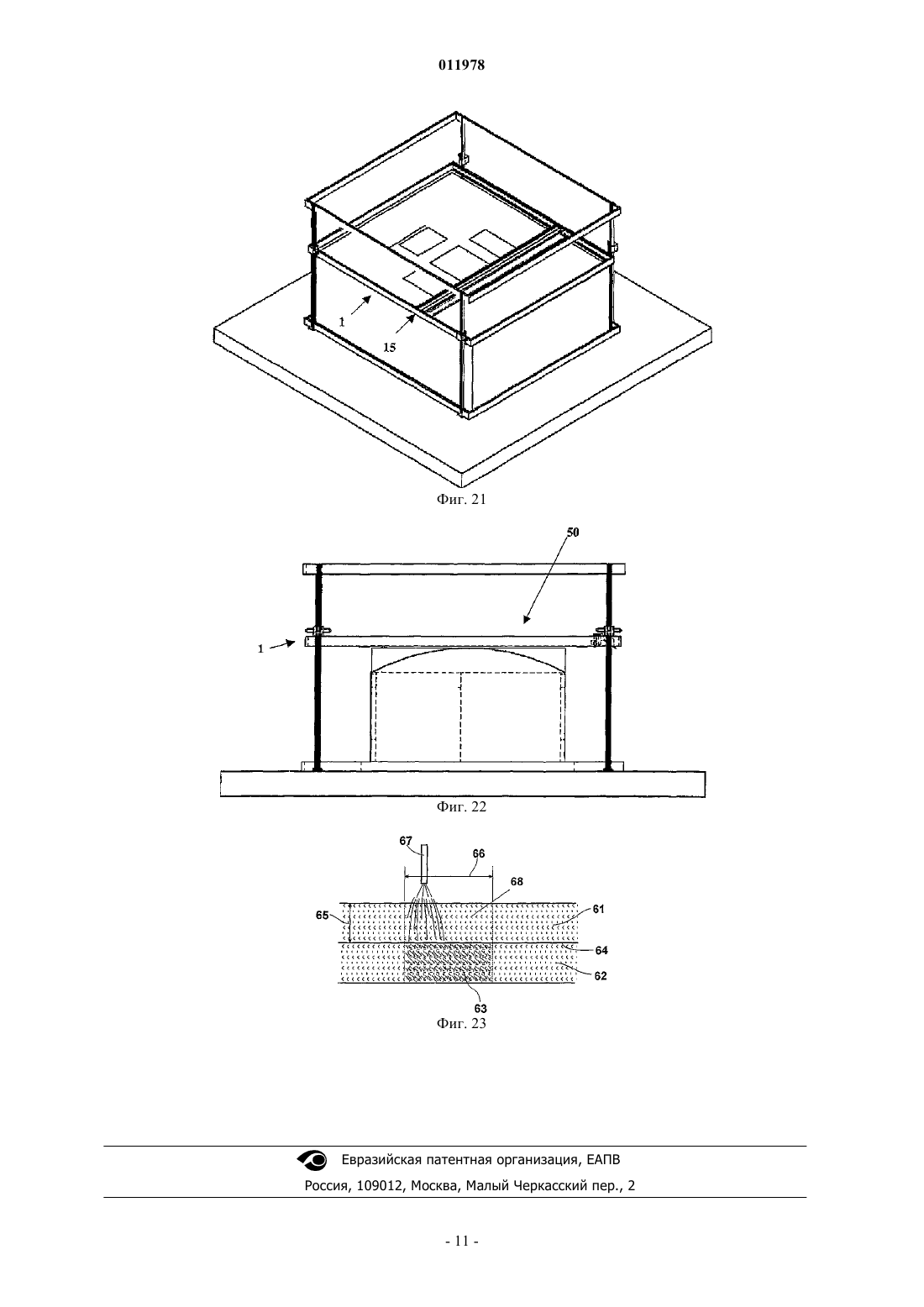
011978 Область техники Настоящее изобретение относится к строительству и, в частности, к автоматическому сооружению зданий или других тяжелых конструкций с помощью способа и устройства, пригодного для сокращения времени строительства и для упрощения связанных с ним операций. Настоящее изобретение также используется для сооружения особенно сочлененных и сложных конструкций. Известный уровень техники Известно много способов сооружения зданий с использованием различных технологий производства строительных работ и материалов. Хорошо известная технология использует бетон, который заливается в полужидкой форме в опалубку. По этой технологии получают объемные бетонные конструкции, имеющие форму использованной опалубки. Эта технология имеет недостаток, заключающийся в необходимости выполнения сложных работ для получения сложных форм, имеющих выпуклые и вогнутые элементы, преимущественно вследствие сложности обеспечения опалубок сложной формы и из-за низкой прочности бетона на растяжение, что требует использования стальной арматуры, которая должна быть изогнута в соответствии с формой опалубки. Другим недостатком является стоимость ручных работ по изготовлению опалубки перед заливкой бетона и при снятии опалубки после отвердения. Другим недостатком является стоимость материала опалубки. Другим недостатком способа строительства из бетона является время ожидания, необходимое для твердения. Таким образом, ощущается потребность в способе сооружения строений, который был бы быстрым и недорогим, пригодным для осуществления автоматическим способом. Сущность изобретения Признаком настоящего изобретения, таким образом, является способ автоматического сооружения строений и выполнения других работ в строительной промышленности. Другим признаком изобретения является создание способа сооружения строений, состоящих из объемных элементов даже сложной формы, включающих также вогнутые или выпуклые поверхности, и подрезанные участки любой формы и размера. Другой целью является создание способа, пригодного для создания структур, устойчивых не только к сжатию, но даже к растягивающим напряжениям. Другим признаком изобретения является создание аппарата, пригодного для осуществления указанного способа. Эти и другие цели достигаются способом автоматического сооружения конгломерируемых конструкций, отличающимся тем, что он включает стадии САПР моделирование конструкции сооружения, в частности, с функцией САПР моделирования поверхности или моделирования объема с получением компьютерного файла модели конструкции; сечения указанного компьютерного файла модели конструкции горизонтальными параллельными плоскостями с предварительно определенным шагом для получения множества плоскостей поперечного сечения конструкции, включающих участки сплошного изображения и пустые участки, соответствующие сплошным и пустым частям конструкции, причем указанные плоскости сортируются снизу вверх; подготовки аппарата, пригодного для поочередной укладки слоя зернистого материала и жидкого связующего внутри ограждающих стен, образующих замкнутый периметр; перемещения указанного аппарата внутри указанного периметра для равномерной укладки первого горизонтального слоя зернистого инертного материала с толщиной, соответствующей указанному предварительно заданному шагу; разбрызгивания первого слоя связующего с помощью указанного аппарата для воспроизведения первой плоскости из указанных плоскостей поперечного сечения, с формированием слоя инертного материала и связующего только на указанных сплошных участках, причем указанный аппарат имеет рабочую головку, способную перемещаться в горизонтальной плоскости; вертикального подъема указанного аппарата в соответствии с указанным шагом; повторения стадии укладки зернистого инертного материала и повторения стадии разбрызгивания на него связующего по числу горизонтальных поперечных сечений конструкции, каждый раз для другой,следующей по вертикали плоскости поперечного сечения, до завершения последнего слоя; удаления инертного материала, который не был скреплен связующим и который накапливается внутри указанного периметра, с высвобождением неразъемной конструкции, точно повторяющей указанную модель конструкции. В частности, указанный способ предусматривает стадию отрисовки оболочек указанной конструкции или ее части с помощью множества единичных объемов, которые образуют внешнюю границу указанной конструкции. В частности, указанные единичные объемы выбирают из группы, состоящей из параллелепипедов,цилиндров, призм, сфер или их частей или комбинаций.-1 011978 Предпочтительно указанные единичные объемы имеют края или вертикальные образующие, параллельные вертикальным сторонам указанной конструкции, и горизонтальные края, параллельные горизонтальным плоскостям указанной конструкции. В предпочтительном примерном варианте исполнения указанные параллельные и горизонтальные плоскости поперечного сечения являются равноудаленными друг от друга. Предпочтительно, предусматривается система автоматизации производственных процессов(САПП), имеющая графическую среду, пригодную для отображения указанного файла модели конструкции. Всегда предпочтительно, чтобы указанный аппарат включал рабочую головку, направляемую на указанной горизонтальной плоскости с независимым перемещением или интерполированным перемещением в декартовых или полярных координатах. В соответствии с другим аспектом настоящего изобретения аппарат для автоматического сооружения конгломерируемых конструкций отличается тем, что включает замкнутый периметр, образованный ограждающими стенами; горизонтальную раму, пригодную для поддержания мостового крана, способного перемещать рабочую головку в горизонтальной плоскости, образованной указанной горизонтальной рамой внутри указанного периметра; средства для приведения в действие указанной рабочей головки на указанной горизонтальной плоскости, параллельной указанному мостовому крану; рамную конструкцию, имеющую по меньшей мере одну стойку, способную поддерживать указанную горизонтальную раму; средства перемещения указанной горизонтальной рамы в вертикальном направлении; блок управления, пригодный для управления последовательностью операций до завершения указанной конструкции; где указанные ограждающие стены способны удерживать указанный инертный материал в рабочем пространстве, имеющем большие размеры, чем указанная конгломерируемая конструкция. В предпочтительном примерном варианте исполнения указанные ограждающие стены являются вертикальными и образуют параллелепипед или цилиндрический объем в указанном рабочем пространстве. Предпочтительно предусматривается покрытие для образования крыши над указанными ограждающими стенами. В частности, указанное покрытие способно герметично закрывать указанный объем таким образом,чтобы внутри мог быть создан вакуум. Предпочтительно указанная рабочая головка включает по меньшей мере одно разбрызгивающее сопло связующего, приводимое в действие контролируемым электрическим клапаном; головку предварительного смешения; подающий насос; резервуар; промывную систему. В предпочтительном примерном варианте исполнения указанная рабочая головка включает объемный дозатор для подачи в указанную рабочую головку известного количества инертного материала для каждого рабочего хода. Предпочтительно указанная рабочая головка включает нож, предназначенный для скольжения по уложенному инертному материалу для его разравнивания для достижения предварительно заданной толщины во всем рабочем пространстве. В частности, указанную смолу выбирают из группы, состоящей из эпоксидных смол; сшитого полиуретана. Предпочтительно указанная смола имеет вязкость в интервале от 3 до 10 Пуаз (П), предпочтительно от 6 до 8 П, и является достаточно текучей для того, чтобы проникать между гранулами зернистого материала на глубину, соответствующую указанному шагу, достигая при этом слоя зернистого материала,обработанного на предыдущей стадии. В частности, указанный зернистый материал имеет гранулометрический состав в интервале от 0,1 до 2 мм, предпочтительно от 0,5 до 1,5 мм. Таким образом, зернистый материал имеет величину максимальной эффективной пористости, рассчитанную на обеспечение проникновения указанного связующего между уложенными гранулами до достижения слоя, уже залитого связующим на предыдущем цикле. Краткое описание чертежей Изобретение будет пояснено путем описания некоторых его примерных вариантов исполнения, иллюстративных, но не ограничивающих, со ссылками на прилагаемые чертежи, на которых: фиг. 1 изображает аппарат для автоматического сооружения конгломерируемой конструкции в соответствии с настоящим изобретением, включающий горизонтальную раму с вертикальным скольжени-2 011978 ем, на которой укреплен с возможностью скольжения мостовой кран, поддерживающий рабочую головку; фиг. 2 изображает конечную часть указанного мостового крана; фиг. 3 и 4 изображают, соответственно, перспективный вид и вид спереди аппарата в соответствии с изобретением,фиг. 5 изображает вид рабочей головки на первой рабочей стадии укладки определенного количества зернистого материала; фиг. 6-8 изображают аппарат в соответствии с изобретением на стадии разравнивания зернистого материала на открытой поверхности ранее уложенного слоя; фиг. 9-11 изображают аппарат в конце рабочего хода разравнивания связующего; фиг. 12-14 изображают аппарат во время обратного хода, когда рабочая головка разбрызгивает связующее на только что уложенный слой зернистого материала только на сплошных участках поперечного сечения; фиг. 15-17 изображают заключительную часть хода разбрызгивания; фиг. 18-20 изображают повторение первой стадии с дальнейшей украдкой определенного количества зернистого материала; фиг. 21 и 22 изображают соответственно перспективный вид и вертикальный разрез на конечных стадиях завершения строения. фиг. 23 изображает вид в поперечном сечении части конструкции, включающей два слоя зернистого материала 61 и 62, уложенных на двух последовательных стадиях. Описание предпочтительного варианта реализации изобретения Далее приведено описание примерного варианта исполнения аппарата, осуществляющего способ в соответствии с изобретением. В частности, на фиг. 1 изображен аппарат в соответствии с изобретением, пригодный для изготовления автоматически конгломерируемых конструкций сооружений. Он включает рамную конструкцию,имеющую четыре стойки 3, 4, 5, 6, способные поддерживать горизонтальную раму 1, передвигающуюся вертикально по таким стойкам. Горизонтальная рама 1 имеет замкнутую форму по меньшей мере с двумя параллельными сторонами 2 для зацепления с возможностью скольжения с двумя концами мостового крана 15, удерживающего рабочую головку 16. В общем, рабочая головка 16 перемещается по стрелке 19 перпендикулярно к направлению движения 18 мостового крана 15, и рама 1 может перемещаться вертикально по стрелкам 11, 12, 13, 14. На фиг. 2 более детально изображена конечная часть мостового крана 15. Конструкция мостового крана 15 включает траверсу 21, имеющую на каждом конце по паре колес 23, входящих в зацепление с внутренней частью балок 2 на фиг. 1. Направляющая 20 выполнена заедино с и параллельно траверсе 21 и удерживает с возможностью скольжения каретку 24 рабочей головки 16, способной разбрызгивать жидкое связующее на только что уложенный слой зернистого материала. Траверса 21 поддерживает бункер 17 удлиненной формы, вытянутый по длине траверсы 21 и предназначенный для нанесения предварительно заданного количества зернистого материала на одном конце плоскости укладки. Вдоль траверсы 21 расположен нож для разравнивания зернистого материала, только что уложенного вышеуказанным бункером 17. Фиг. 3 и 4 изображают соответственно перспективный вид и вид спереди аппарата в соответствии с изобретением, и фиг. 5 показывает вид рабочей головки 16 на первой рабочей стадии укладки некоторого количества зернистого материала, когда рама 1 находится в нулевом положении (уровень земли), мостовой кран 15 находится в положении его первой остановки и рабочая головка 16 находится в положении ее первой остановки. Аппарат включает четыре ограждающие стены 31, образующие объем, который должен быть заполнен зернистым материалом в соответствии со способом по изобретению. Фиг. 6-8 изображают аппарат в соответствии с изобретением на стадии разравнивания зернистого материала на открытой поверхности ранее уложенного слоя. На этой стадии мостовой кран 15 движется в направлении к его второму концевому упору, распределяя и разравнивая зернистый материал, уложенный на предыдущей стадии, с помощью ножа 22. Фиг. 9-11 изображают аппарат в конце предыдущей стадии. Рама 1 все еще находится на уровне земли, мостовой кран 15 достиг его второго концевого упора и неподвижен, а рабочая головка 16 все еще находится у ее первого концевого упора. Фиг. 12-14 изображают аппарат на стадии обратного хода, когда рабочая головка 16 разбрызгивает связующее на слой зернистого материала только на сплошных участках расчетного поперечного сечения. На этой стадии рама 1 все еще находится на нулевом уровне, мостовой кран 15 возвращается назад и рабочая головка 16 разбрызгивает связующее и перемещается по своей оси скольжения. Фиг. 15-17 изображают аппарат в конце стадии разбрызгивания, когда рама 1 все еще находится на уровне земли, мостовой кран 15 и рабочая головка 16 переместились назад к первому концевому упору. В этом положении дозатор 40 мостового крана 15 заполнен количеством зернистого материала, которое-3 011978 должно быть уложено на следующей стадии. Фиг. 18-20 изображают повторение предыдущих стадий, в частности первой стадии, на втором уровне укладки, достигнутом путем поднятия рамы 1 на высоту, равную шагу. На этой стадии количество зернистого материала, накопленное на предыдущей стадии, укладывается с помощью дозатора 40. При подъеме рамы 1 на высоту шага мостовой кран 15 и рабочая головка 16 находятся в положении их соответствующих первых концевых упоров. На фиг. 21 аппарат выполняет последнюю стадию перед завершением сооружения конгломерируемой конструкции. На фиг. 22 сооружение строения 50 завершено. Следующими стадиями является удаление зернистого материала, не сцементированного связующим, в результате чего остается сцементированная часть,и, таким образом, строение, и удаление ограждающих стен и затем аппарата. Фиг. 23 изображает вид в поперечном сечении части конструкции, включающей два слоя зернистого материала 61 и 62, уложенные на двух последовательных стадиях. Смолу выбирают из группы, состоящей из эпоксидной смолы и сшитого полиуретана; она имеет вязкость в интервале от 3 до 10 П,предпочтительно от 6 до 8 П, и является достаточно текучей для того, чтобы проникать между гранулами зернистого материала на глубину, соответствующую шагу 68, тем самым достигая ранее сформированного слоя 64 зернистого материала. В частности, указанный зернистый материал имеет гранулометрический состав в интервале от 0,1 до 2 мм, предпочтительно от 0,5 до 1,5 мм; таким образом, зернистый материал имеет максимальную эффективную пористость, обеспечивающую проникновение указанного связующего между уложенными гранулами до достижения слоя, уже обработанного на предыдущем цикле. Приведенное выше описание конкретных вариантов исполнения настолько полно раскрывает изобретение с концептуальной точки зрения, что другие специалисты, используя современный уровень знаний, будут способны модифицировать и/или адаптировать различные применения таких вариантов исполнения без проведения дальнейших исследований и не выходя за пределы изобретения, и потому следует понимать, что такие адаптации и модификации должны считаться эквивалентными конкретным вариантам исполнения. Средства и материалы для реализации различных описанных тут функций могут иметь различную природу, не выходя, по этой причине, за границы области изобретения. Следует отметить, что фразеология или терминология, используемые в патенте, предназначены для описания, а не для ограничения объема притязаний. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ автоматического сооружения конгломерируемых конструкций, отличающийся тем, что он включает стадии моделирования с помощью САПР конструкции сооружения, в частности, с функцией САПР моделирования поверхности или объемного моделирования, с получением компьютерного файла модели конструкции; сечения указанного компьютерного файла модели конструкции горизонтальными параллельными плоскостями, в частности равноудаленными плоскостями с предварительно определенным шагом, для получения множества плоскостей поперечного сечения конструкции, включающих участки сплошного изображения и пустые участки, соответствующие сплошным и пустым частям конструкции, причем указанные плоскости сортируются снизу вверх; подготовки, внутри ограждающих стен, образующих замкнутый периметр, аппарата, пригодного для поочередной укладки слоя зернистого материала и жидкого связующего; перемещения указанного аппарата внутри указанного периметра для равномерной укладки первого горизонтального слоя зернистого инертного материала с толщиной, соответствующей указанному предварительно заданному шагу; разбрызгивания первого слоя связующего с помощью указанного аппарата для воспроизведения первой плоскости из указанных плоскостей поперечного сечения с формированием слоя инертного материала и связующего только на указанных сплошных участках, причем указанный аппарат имеет рабочую головку, способную перемещаться в горизонтальной плоскости; вертикального подъема указанного аппарата в соответствии с указанным шагом; повторения стадии укладки зернистого инертного материала и повторения стадии разбрызгивания на него связующего по числу горизонтальных поперечных сечений конструкции, каждый раз для другой и следующей по вертикали плоскости поперечного сечения до завершения последнего слоя; удаления инертного материала, который не был скреплен связующим и который накапливается внутри указанного периметра, с высвобождением неразъемной конструкции, точно воспроизводящей указанную модель конструкции. 2. Способ по п.1, в котором указанная стадия моделирования предусматривает стадию отрисовки оболочек указанной конструкции или ее участка с использованием множества элементарных объемов и,в частности, указанные единичные объемы выбирают из группы, состоящей из параллелепипедов, ци-4 011978 линдров, призм, сфер или их частей или комбинаций. 3. Способ по п.1, в котором указанные единичные объемы имеют вертикальные края или вертикальные образующие, параллельные вертикальным сторонам указанной конструкции, и имеют горизонтальные края, параллельные горизонтальным плоскостям указанной конструкции. 4. Способ по п.1, в котором указанный аппарат включает рабочую головку, направляемую на указанной горизонтальной плоскости с независимым перемещением или интерполированным перемещением в декартовых или полярных координатах. 5. Способ по п.1, в котором указанную смолу выбирают из группы, состоящей из эпоксидных смол; сшитого полиуретана. 6. Способ по п.1, в котором указанная смола имеет вязкость в интервале от 3 до 10 П, предпочтительно от 6 до 8 П, и обладает достаточной текучестью для проникновения между гранулами зернистого материала на глубину, соответствующую указанному шагу, достигая тем самым слоя ранее сформованного зернистого материала. 7. Способ по п.1, в котором указанный зернистый материал имеет гранулометрический состав в интервале от 0,1 до 2 мм, предпочтительно от 0,5 до 1,5 мм, благодаря чему он имеет величину максимальной эффективной пористости, обеспечивающую проникновение указанного связующего между уложенными гранулами до достижения слоя, уже обработанного на предыдущем цикле. 8. Аппарат для автоматического сооружения конгломерируемых конструкций, отличающийся тем,что включает замкнутый периметр, образованный ограждающими стенами; горизонтальную раму, пригодную для поддержания мостового крана, способного перемещать рабочую головку в горизонтальной плоскости, образованной указанной горизонтальной рамой внутри указанного периметра; средства для приведения в действие указанной рабочей головки на указанной горизонтальной плоскости, параллельной указанному мостовому крану; рамную конструкцию, имеющую по меньшей мере одну стойку, способную поддерживать указанную горизонтальную раму; средства для перемещения указанной горизонтальной рамы в вертикальном направлении; блок управления, способный управлять последовательностью операций до завершения указанной конструкции; где указанные ограждающие стены способны удерживать указанный инертный материал в рабочем пространстве, имеющем больший размер, чем указанная конгломерируемая конструкция. 9. Аппарат по п.8, в котором указанная рабочая головка включает нож, предназначенный для скольжения по уложенному инертному материалу для его разравнивания для достижения предварительно заданной толщины на всем рабочем пространстве. 10. Аппарат по п.8, в котором указанные ограждающие стены являются вертикальными и образуют параллелепипед или цилиндрический объем в указанном рабочем пространстве. 11. Аппарат по п.8, в котором предусмотрено покрытие для создание крыши над указанными ограждающими стенами. 12. Аппарат по п.11, в котором указанное покрытие способно герметично закрывать указанный объем таким образом, чтобы внутри мог быть создан вакуум. 13. Аппарат по п.8, в котором указанная рабочая головка включает по меньшей мере одно разбрызгивающее сопло связующего, приводимое в действие управляемым электрическим клапаном; головку предварительного смешения; подающий насос; резервуар; промывную систему. 14. Аппарат по п.8, в котором указанная рабочая головка включает объемный дозатор для подачи в указанную рабочую головку определенного количества инертного материала для каждого рабочего хода.
МПК / Метки
МПК: B29C 67/24, B29C 67/00
Метки: автоматически, сооружения, конгломерируемых, конструкций, способ, устройство
Код ссылки
<a href="https://eas.patents.su/12-11978-sposob-i-ustrojjstvo-dlya-sooruzheniya-avtomaticheski-konglomeriruemyh-konstrukcijj.html" rel="bookmark" title="База патентов Евразийского Союза">Способ и устройство для сооружения автоматически конгломерируемых конструкций</a>
Конструктивная система из элементов кручения/тороидальных элементов и способы сооружения конструкций с использованием этих элементов
Номер патента: 3037
Опубликовано: 26.12.2002
Автор: Провитола Энтони И.
Метки: способы, этих, конструкций, использованием, элементов, конструктивная, система, сооружения
Формула / Реферат:
1. Конструктивная система, содержащая тороидальные элементы кручения и средства соединения этих элементов. 2. Конструктивная система из элементов кручения, содержащая конструктивные элементы, работающие на кручение при восприятии нагрузки, и средства соединения этих конструктивных элементов с обеспечением передачи скручивающей нагрузки, действующей, по меньшей мере, на один конструктивный элемент, по меньшей мере, одному другому конструктивному...
Способ укладки фундамента для здания или сооружения и устройство для его применения
Номер патента: 773
Опубликовано: 24.04.2000
Автор: Адсбёлль Бьярне
МПК: E02D 37/00
Метки: укладки, сооружения, устройство, способ, здания, применения, фундамента
Формула / Реферат:
1. Способ укладки фундамента для существующего здания, включающий создание промежутка между фундаментом (1) здания и фундаментной сваей (2), на верхней части которой имеется опорная поверхность (7), и создание между указанной опорной поверхностью (7) и опорной поверхностью (3) на фундаменте (1) ядра, которое является литым и для создания которого используют жидкость, являющуюся отверждаемым литейным материалом, при этом отверждаемый литейный...
Способ изготовления решётчатых конструкций и устройство для его реализации
Номер патента: 5848
Опубликовано: 30.06.2005
Авторы: Овчинников Игорь Георгиевич, Муравьев Владимир Михайлович, Муравьев Юрий Владимирович
МПК: B23K 31/02, B21F 27/10
Метки: конструкций, реализации, способ, решётчатых, устройство, изготовления
Формула / Реферат:
1. Способ изготовления решетчатых конструкций, включающий формирование заготовки из элементов, их сварку и последующее растяжение с требуемым коэффициентом растяжения, отличающийся тем, что элементы укладывают вплотную друг к другу, осуществляют дуговую сварку в защитной атмосфере швами заданной протяженности локально в заданных точках, определяющих характер рисунка решетки и прочность соединения элементов. 2. Способ по п.1, отличающийся тем,...
Способ сооружения плиты проезжей части в тоннеле с двумя и более пролетами под плитой и устройство для его реализации
Номер патента: 8632
Опубликовано: 29.06.2007
Авторы: Антипов Юрий Васильевич, Штерн Геннадий Яковлевич, Богданов Владимир Борисович, Антипов Виктор Васильевич, Туловов Рустам Рузимуратович, Яцков Борис Иванович, Браккер Илья Израилевич
МПК: E21D 11/10, E02D 29/045
Метки: сооружения, способ, плиты, плитой, пролетами, части, более, проезжей, устройство, тоннеле, реализации, двумя
Формула / Реферат:
1. Способ сооружения плиты проезжей части в тоннеле с двумя и более пролетами под плитой, включающий демонтаж, перенос и укладку вспомогательных рельсовых путей, монтаж арматурных каркасов, демонтаж, перенос и установку секционных опалубок стен пролетов и плиты, а также их бетонирование, отличающийся тем, что для повышения жесткости конструкции, снижения трудоемкости и сокращения времени выполнения работ сооружение плиты осуществляют с опорой на...
Устройство для упрощения первичного сооружения, и внутреннего осмотра/ и ремонта больших емкостей, таких как восстановительные паровые котлы и цистерны
Номер патента: 8309
Опубликовано: 27.04.2007
Автор: Бьерклунд Андерс
Метки: паровые, упрощения, сооружения, таких, емкостей, восстановительные, первичного, цистерны, внутреннего, больших, устройство, ремонта, котлы
Формула / Реферат:
1. Устройство для упрощения первоначального сооружения, а также внутреннего осмотра и ремонта больших емкостей (1), таких как восстановительные паровые котлы и резервуары, содержащее платформу (10), которая подвешена с возможностью вертикального регулирования посредством подвесных канатов (13), свисающих с крышки (6) емкости (1), причем платформа (10) выполнена по меньшей мере из двух параллельных разнесенных балок (11), к которым присоединены...
Предыдущий патент: Распределительное устройство для ёмкостей с двухфазными спутными нисходящими потоками
Следующий патент: Автоверт
Случайный патент: Способ получения воды с контролируемой минерализацией