Система и способ бурения скважины в объекте
Формула / Реферат
1. Система для бурения скважины в объекте, содержащая гидромонитор для создания абразивной струи, содержащей текучую среду, и для вдувания абразивной струи с эрозионной мощностью для соударения с объектом в области соударения, таким образом разрушая объект в области соударения, средство развертки для перемещения области соударения по выбранной траектории в скважине и средство модуляции для модулирования эрозионной мощности абразивной струи при перемещении области соударения по выбранной траектории, отличающаяся тем, что абразивная струя содержит смесь, содержащую текучую среду и множество абразивных частиц, и средство модуляции выполнено с возможностью модулирования количества абразивных частиц в смеси.
2. Система по п.1, отличающаяся тем, что средство развертки содержит вращательное средство для вращения абразивной струи относительно оси вращения, в соответствии с чем область соударения располагается со смещением относительно оси вращения.
3. Система по п.1 или 2, отличающаяся тем, что средство модуляции содержит средство управления модуляцией, выполненное с возможностью управления средством модуляции для модулирования эрозионной мощности абразивной струи относительно положения области соударения на выбранной траектории.
4. Система по любому из пп.1-3, отличающаяся тем, что содержит позиционный датчик для создания сигнала, отображающего положение области соударения на выбранной траектории.
5. Система по любому из пп.1-4, отличающаяся тем, что содержит навигационный датчик для обеспечения сигнала, отображающего направление выполнения бурения скважины в ходе проходки объекта.
6. Система по любому из пп.1-5, отличающаяся тем, что средство модуляции содержит средство для модулирования мощности, переходящей в кинетическую энергию абразивных частиц.
7. Система по любому из пп.1-6, отличающаяся тем, что средство модуляции содержит средство управления скоростью, выполненное с возможностью модулирования скорости абразивных частиц в абразивной струе.
8. Система по п.7, отличающаяся тем, что гидромонитор содержит ускорительное сопло, в котором поддерживается перепад давления, при этом средство управления скоростью содержит средство управления давлением, выполненное с возможностью модулирования перепада давления.
9. Система по п.1, отличающаяся тем, что содержит смесительную камеру для смешивания текучей среды с абразивными частицами и средство подачи абразивных частиц в смесительную камеру, при этом средство модуляции выполнено с возможностью модулирования скорости подачи абразивных частиц средством подачи в смесительную камеру для модулирования количества абразивных частиц в смеси.
10. Система по п.9, отличающаяся тем, что средство подачи абразивных частиц содержит средство рециркуляции по меньшей мере части абразивных частиц из обратного потока смеси, расположенной ниже области соударения с объектом в смесительную камеру, при этом средство модуляции выполнено с возможностью модулирования, по меньшей мере, скорости рециркуляции.
11. Система по п.9 или 10, отличающаяся тем, что средство подачи абразивных частиц содержит средство транспортировки абразивных частиц предпочтительно в виде подвижного магнита, при этом средство модуляции выполнено с возможностью модулирования, по меньшей мере, скорости транспортировки, обеспеченной средством транспортирования.
12. Система по п.11, отличающаяся тем, что средство транспортировки является подвижным, и перемещение средства транспортировки вызывает транспортировку абразивных частиц.
13. Система по п.11 или 12, отличающаяся тем, что средство транспортировки соединено с управляемой энергетической системой скважины для управления средством транспортировки предпочтительно для приведения средства транспортировки в движение.
14. Система по п.13, отличающаяся тем, что управляемая энергетическая система скважины содержит генератор электроэнергии, приводимый в действие потоком текучей среды, электрический двигатель, механически соединенный со средством транспортировки для приведения средства транспортировки в движение, при этом электрический двигатель электрически соединен с генератором электроэнергии через электронную систему управления.
15. Способ бурения скважины в объекте, содержащий следующие стадии:
создание абразивной струи, содержащей текучую среду;
вдувание абразивной струи с эрозионной мощностью для соударения с объектом в области соударения, таким образом разрушая объект в области соударения;
перемещение области соударения по выбранной траектории в скважине;
модулирование эрозионной мощности абразивной струи при перемещении области соударения;
отличающийся тем, что абразивная струя содержит смесь, содержащую текучую среду и множество абразивных частиц, средство модуляции модулирует количество абразивных частиц в смеси.
16. Способ по п.15, отличающийся тем, что модулирование эрозионной мощности абразивной струи содержит модулирование мощности, переходящей в кинетическую энергию абразивных частиц.

Текст
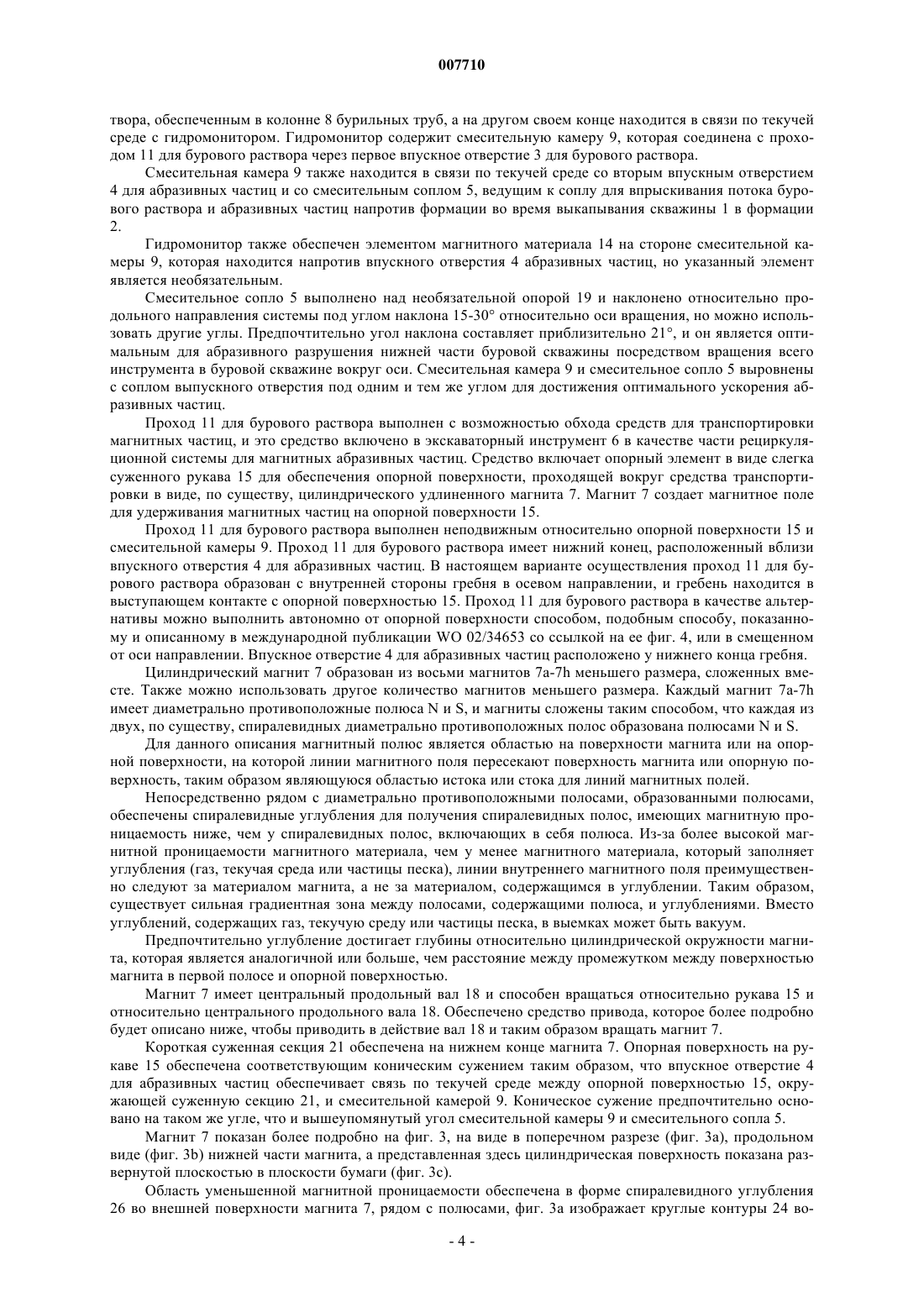
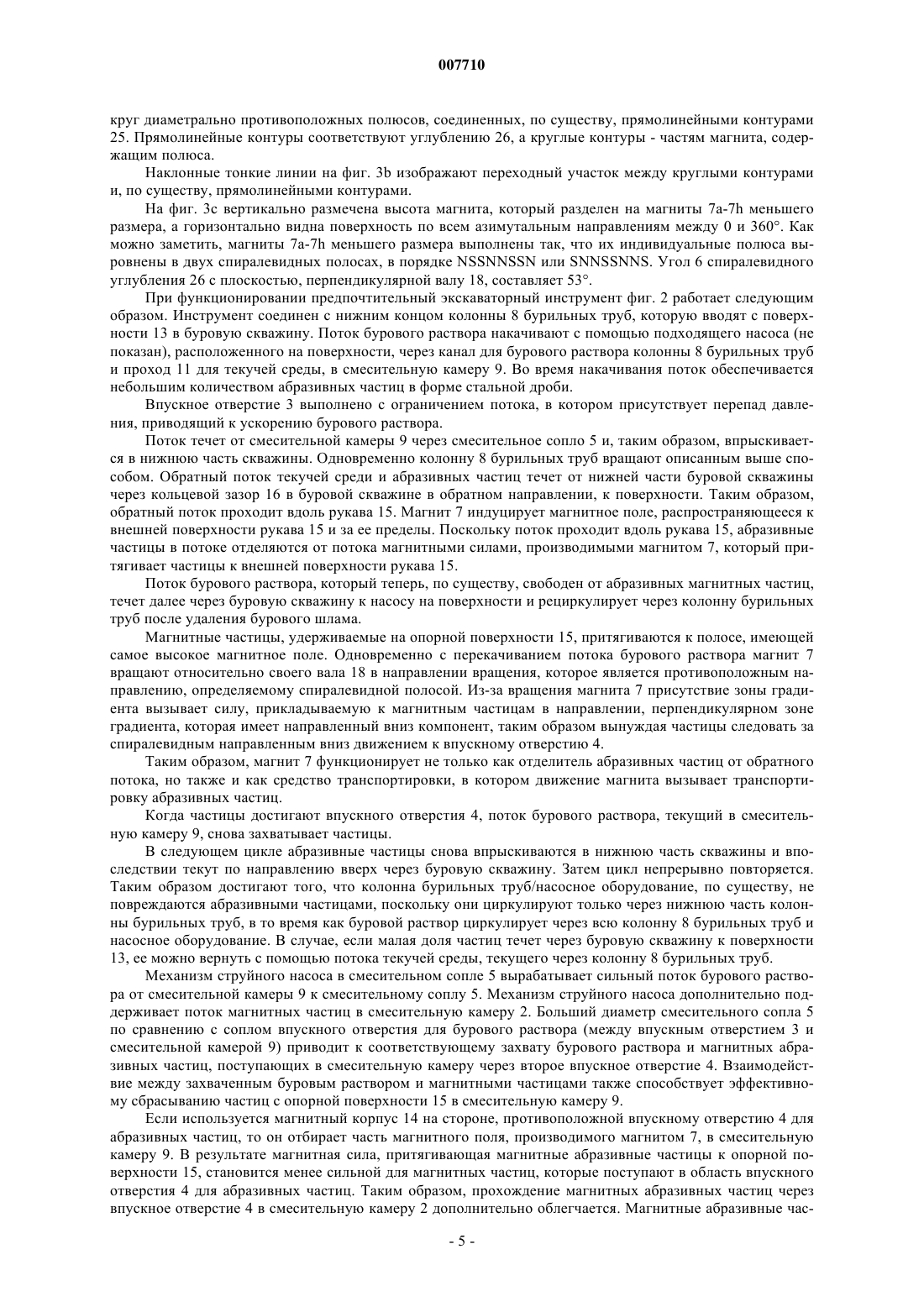
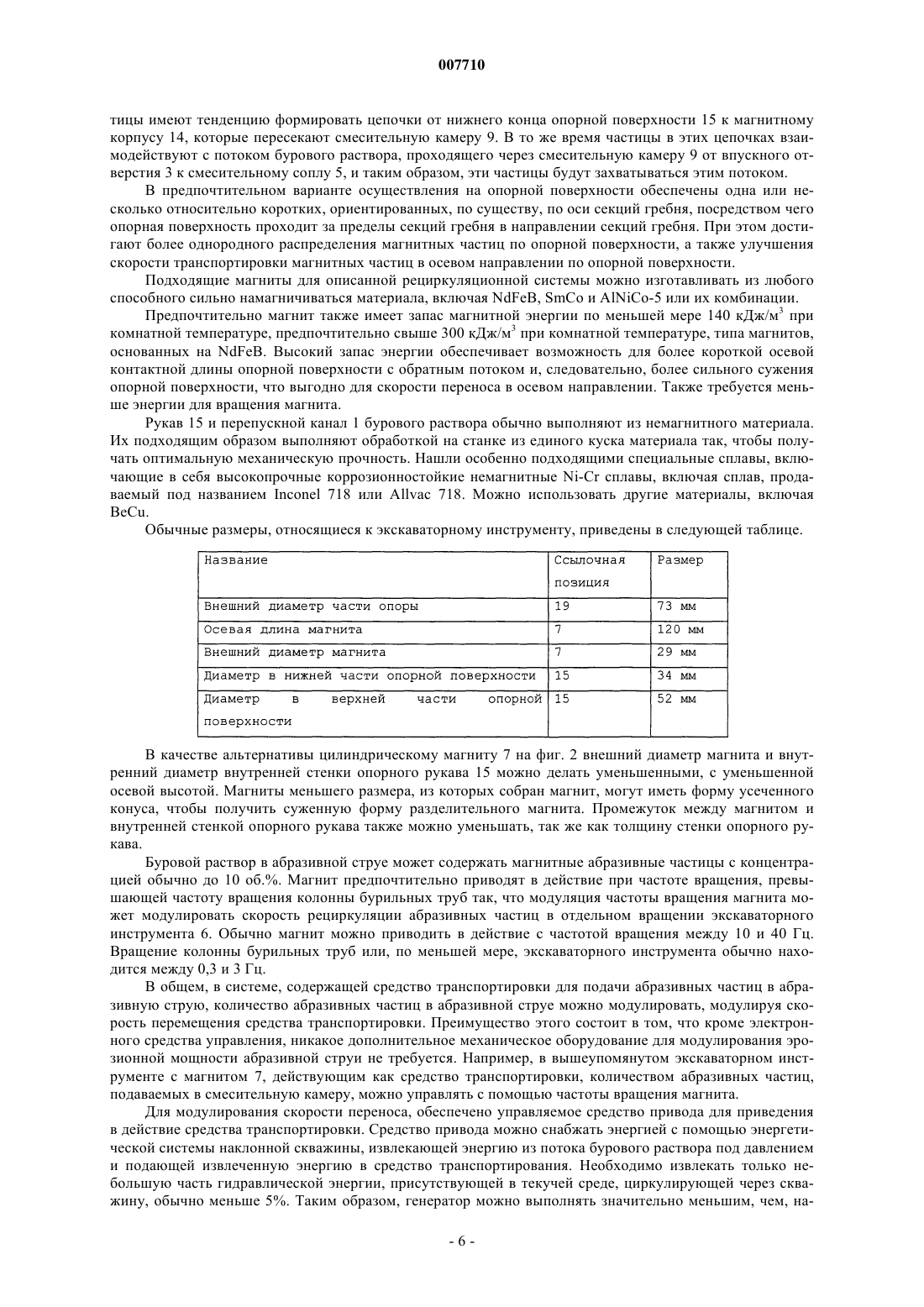
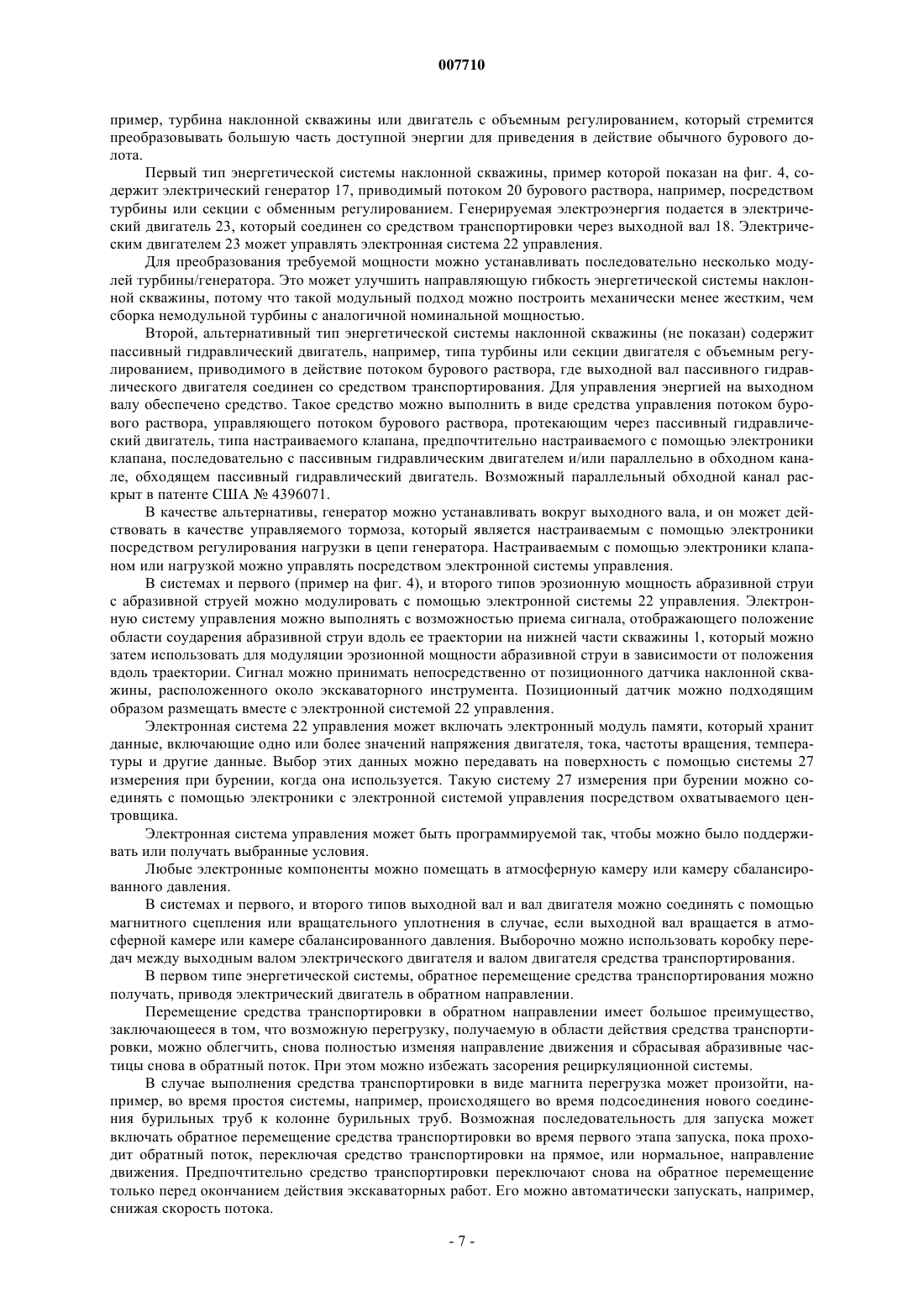
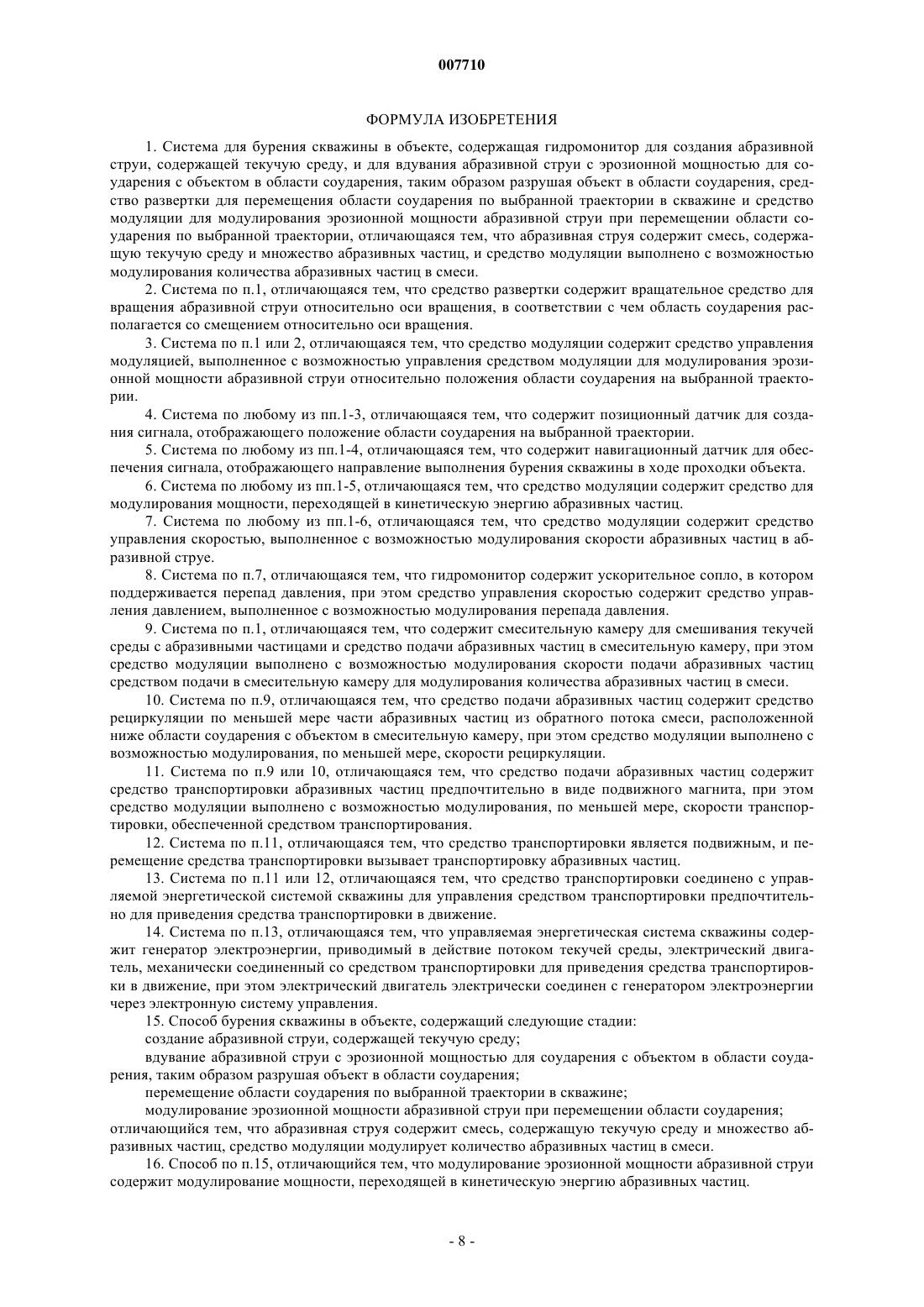
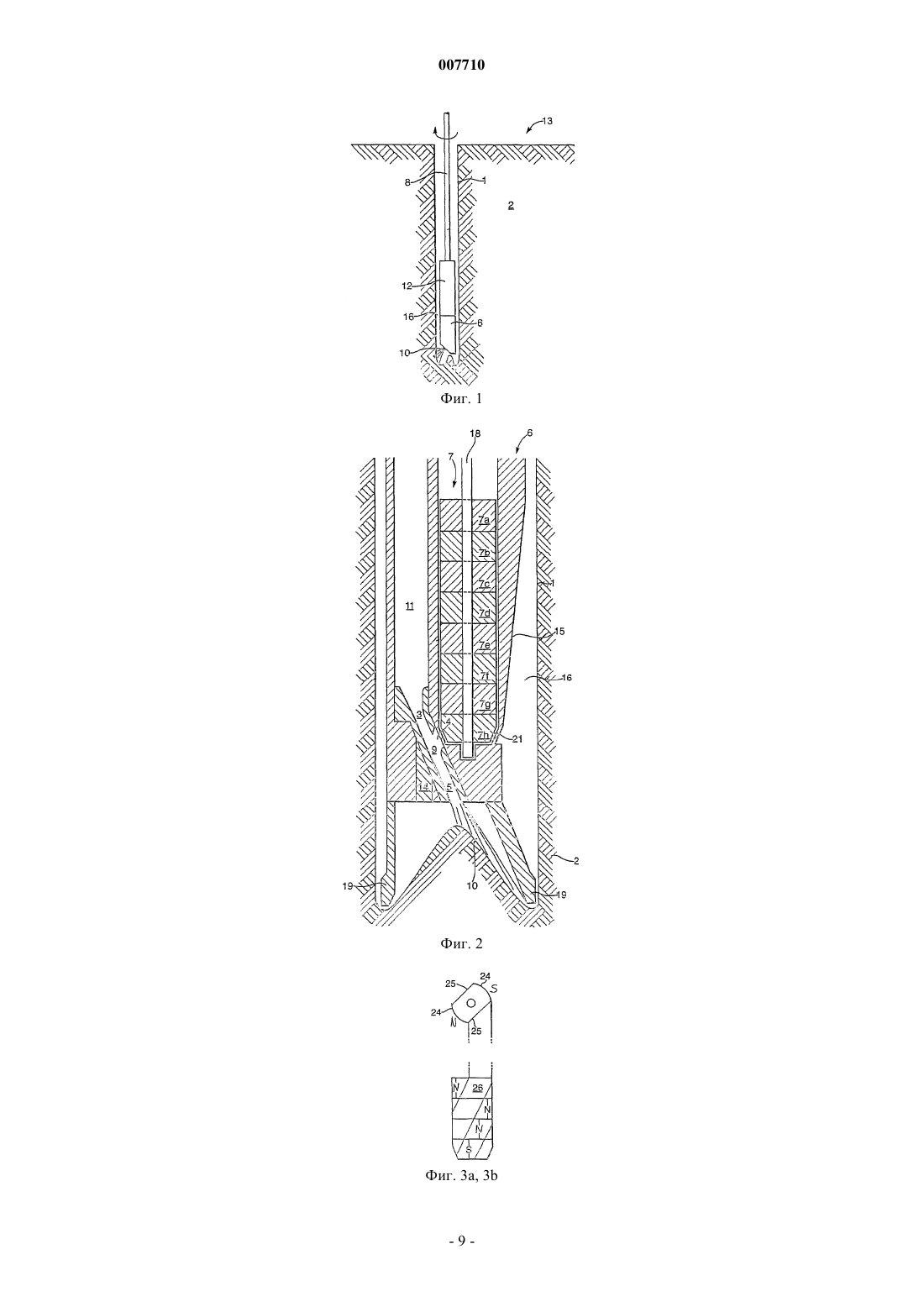
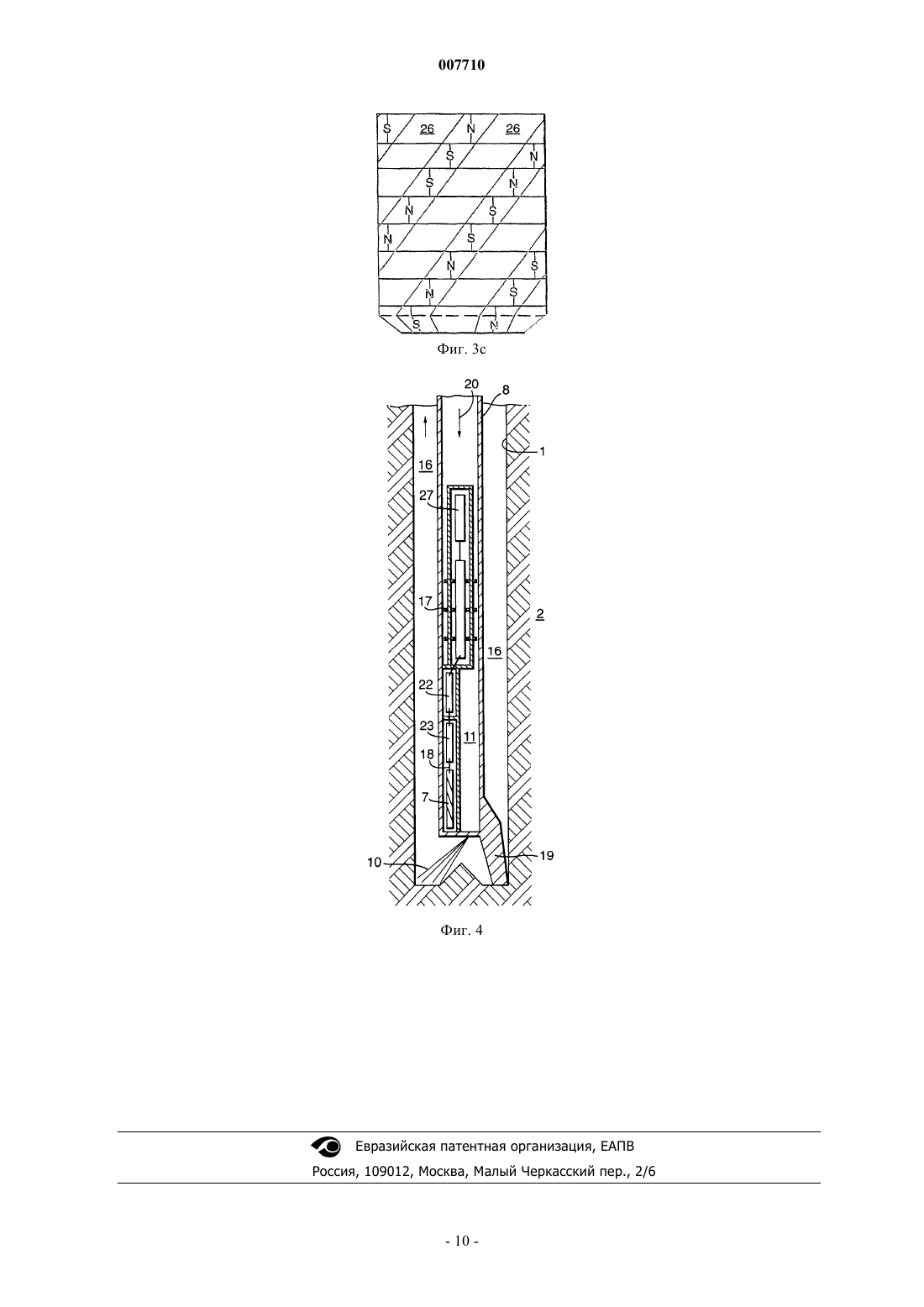
007710 Настоящее изобретение касается системы для бурения скважины в объекте, более конкретно, для бурения скважины в подземной формации. В частности, система содержит гидромонитор для создания абразивной струи из смеси, содержащей текучую среду и множество абразивных частиц, и для вдувания абразивной струи с эрозионной мощностью для соударения с объектом в области соударения, таким образом разрушая объект в области соударения. Изобретение также касается способа бурения скважины в объекте, более конкретно, бурения скважины в подземной формации. В частности, способ содержит стадии создания абразивной струи из смеси,содержащей текучую среду и множество абразивных частиц, и вдувания абразивной струи с эрозионной мощностью для соударения с объектом. В патенте США 5944123 описан способ бурения, включающий вращение бурового элемента, при этом буровой раствор подают в буровой элемент, для его выхода оттуда через выполненное в нем отверстие. Продвижения бурового элемента со смещением от оси достигают посредством модулирования скорости вращения бурового элемента при его вращении. Из-за увеличивающегося трения со стенкой буровой скважины на больших глубинах устойчивость при перемещении этой установки, как ожидается, уменьшается при бурении скважины на относительно большой глубине, как, например, обычно требуется при бурении скважины для добычи минеральных углеводородов. В соответствии с настоящим изобретением создана система для бурения скважины в объекте, содержащая гидромонитор для создания абразивной струи из смеси, содержащей текучую среду и большое количество абразивных частиц, и для вдувания абразивной струи с эрозионной мощностью для соударения с объектом в области соударения, таким образом разрушая объект в области соударения, средство развертки для перемещения области соударения по выбранной траектории в скважине и средство модуляции для модулирования эрозионной мощности абразивной струи при перемещении области соударения по выбранной траектории. Также создан способ бурения скважины в объекте, содержащий следующие стадии: создание абразивной струи из смеси, содержащей текучую среду и множество абразивных частиц; вдувание абразивной струи с эрозионной мощностью для соударения с объектом в области соударения, таким образом разрушая объект в области соударения; перемещение области соударения по выбранной траектории в скважине; модулирование эрозионной мощности абразивной струи при перемещении области соударения. Посредством модулирования эрозионной мощности абразивной струи при перемещении области соударения можно менять величину эрозии, вызываемую одной абразивной струей в каждой области соударения вдоль выбранной траектории, при этом достигается направляющее управление. Искривленную скважину можно бурить посредством разрушения большего объема формации в выбранной области соударения на одной стороне скважины, чем в другой выбранной области на азимутально противоположной стороне скважины. Прямую скважину можно бурить посредством равномерного разрушения формации во всех областях по траектории. В частности, на больших глубинах система для бурения скважины в земной формации может быть разрушена из-за трения между буровой установкой и стенкой скважины, окружающей буровую установку. Трение вызывает силы трения, действующие на буровую систему и зависящие от перемещения системы в скважине. Когда направляющее управление зависит от модуляции скорости перемещения буровой системы, тогда упомянутое трение нарушает направляющую стабильность системы. Преимущество модулирования эрозионной мощности абразивной струи состоит в том, что таким образом скорость удаления вещества из объекта модулируется, в то время как прямой механический контакт между буровым инструментом и стенкой скважины не изменяется. Эрозионную мощность абразивной струи можно модулировать, модулируя мощность, переходящую в кинетическую энергию абразивных частиц, присутствующих в абразивной струе. Это можно выполнять, модулируя удельный массовый расход абразивных частиц в абразивной струе, например, модулируя количество абразивных частиц в абразивной струе, или модулируя скорость абразивных частиц в абразивной струе, что можно выполнять, например, посредством модулирования перепада давления ускорения текучей среды в средстве гидромонитора, или комбинируя и то, и другое. Предпочтительно, средство модуляции соединено со средством управления модуляцией, выполненным с возможностью управления средством модуляцией так, что эрозионная мощность модулируется относительно положения области соударения на выбранной траектории. Таким образом, модуляцию можно выполнять так, что эрозионная мощность будет увеличиваться, когда абразивная струя сталкивается с формацией, где требуется большая эрозия, и, наоборот, эрозионная мощность может уменьшаться,когда абразивная струя сталкивается с формацией, где требуется меньшая эрозия. Далее изобретение будет описано посредством примера, со ссылкой на прилагаемые чертежи, на которых изображено следующее: фиг. 1. схематично изображает поперечное сечение системы для бурения скважины в формации подземного грунта в соответствии с настоящим изобретением; фиг. 2. - поперечное сечение части предпочтительного экскаваторного инструмента для системы-1 007710 фиг. 1; фиг. 3 - модель поверхности магнитного поверхностного оборудования для использования в предпочтительном экскаваторном инструменте фиг. 2; фиг. 4 - пример системы для бурения скважины в подземной формации, включающей энергетическую систему скважины. На чертежах подобные части имеют идентичные ссылочные позиции. Фиг. 1 схематично изображает систему 1 для бурения скважины в подземной формации 2, в частности, скважины для добычи минеральных углеводородов. Система содержит экскаваторный инструмент 6,установленный на нижнем конце колонны 8 бурильных труб, которую вводят с поверхности 13 в скважину 1. Колонна 8 бурильных труб обеспечена продольным проходом для прохождения бурового раствора в экскаваторный инструмент 6. Экскаваторный инструмент 6 содержит средство-гидромонитор (не показан) для создания абразивной струи 10 в направлении впрыскивания для соударения с подземной формацией 2 в области соударения. Абразивная струя имеет определенную эрозионную мощность, которую можно модулировать. Система дополнительно содержит средство развертки (не показано), выполненное с возможностью перемещения абразивной струи вдоль формации, таким образом перемещая область соударения по траектории. В системе фиг. 1 средство развертки выполнено в форме вращательного средства (схематично представлено стрелкой) для вращения абразивной струи в скважине относительно оси вращения, и эта ось вращения, по существу, совпадает с продольным направлением скважины. Поскольку область соударения расположена эксцентрически относительно оси вращения, вращение абразивной струи в скважине приводит к тому, что струя и область соударения перемещаются, по существу, по круговой траектории в скважине. Предпочтительно эксцентрическая область соударения перекрывается с центром вращения так, что середина скважины также подвергается воздействию эрозионной мощности абразивной струи. Колонна 8 бурильных труб также обеспечена блоком 12 управления, расположенным в скважине. В качестве альтернативы, блок управления можно размещать на поверхности 13. Блок 12 управления может включать средства модуляции для модулирования эрозионной мощности абразивной струи 10, сталкивающейся с формацией 2. Модулирование эрозионной мощности включает управление эрозионной мощностью. Система работает следующим образом. Поток бурового раствора закачивают подходящим насосом (не показан) через продольный проход колонны 8 бурильных труб. Часть или весь буровой раствор направляется к гидромонитору для создания абразивной струи 10. Абразивная струя вдувается для соударения с формацией. Формация разрушается в области соударения в результате соударения абразивной струи 10 с формацией 2. Одновременно абразивная струя вращается относительно оси вращения. Таким образом, область соударения перемещается по круговой траектории в скважине так, что формация может разрушаться во всех азимутальных направлениях. Модулируя эрозионную мощность абразивной струи можно достигнуть высокой степени направляющего управления. Поддерживая эрозионную мощность абразивной струи постоянной, формацию разрушают равномерно со всех сторон скважины, и следовательно, бурение скважины производят прямолинейно. Однако искажения во вращении экскаваторного инструмента или изменения в свойствах породной формации в области скважины, или другие причины могут привести к неравномерной эрозии в скважине. Может потребоваться направленная коррекция при помощи модуляции эрозионной мощности для компенсации случайной неравномерной эрозии. Эрозионную мощность абразивной струи можно также модулировать,чтобы преднамеренно выкапывать изогнутую скважину. Когда абразивную струю ориентируют для соударения с формацией в области, в которой требуется большая эрозия, чтобы установить направленную коррекцию, эрозионную мощность абразивной струи можно периодически увеличивать, приводя к более высокой интенсивности эрозии в этой области. В качестве альтернативы или в комбинации, эрозионную мощность абразивной струи можно уменьшать,когда абразивная струя ориентирована для соударения с формацией в области, для которой требуется меньшее количество эрозии. Таким образом, предпочтительно, чтобы средство модуляции содержало средство управления модуляцией, выполненное с возможностью управления средством модуляции так, чтобы эрозионную мощность абразивной струи модулировать относительно положения области соударения на выбранной траектории. Для устанавливания положения области соударения систему можно обеспечить позиционным датчиком, например датчиком измерения при бурении, для создания сигнала, показывающего положение абразивной струи. Для устанавливания направления бурового потока через формацию, систему можно обеспечить навигационным датчиком, например датчиком измерения при бурении, для обеспечения сигнала, показывающего направление, под которым выполняется бурение скважины в подземной формации. Такой навигационный датчик можно обеспечить в форме его одного или в комбинации с датчиком направления, обеспечивающим сигнал, показывающий направление устройства относительно базисного вектора, позиционным датчиком, обеспечивающим сигнал, показывающий одну или несколько позици-2 007710 онных координат относительно базисной точки, датчиком плотности формации, обеспечивающим информацию о расстоянии для изменения типа формации или содержания близлежащей формации или любым другим подходящим датчиком. Механические силы в системе бурения, которая основана на абразивно-струйной перфорации, намного меньше, чем силы для систем, основанных на механическом удалении горной породы. Это имеет преимущество, заключающееся в том, что датчики можно располагать очень близко к экскаваторному инструменту, обеспечивая возможность раннего и точного сообщения сигнала для средства управления модуляцией. Датчики можно расположить, например, в той же камере, что и средство управления модуляцией. В качестве альтернативы, положение и и/или направление продвижения через формацию абразивной струи можно определять на основании параметров, доступных на поверхности 13, включающих крутящий момент на колонне 8 бурильных труб и азимутальное положение колонны 8 бурильных труб, и осевое положение и скорость колонны 8 бурильных труб. Решение изменять или корректировать направление бурения можно также принимать через оператора направляющей системы на поверхности. В случае сигнала, исходящего от датчика измерения при бурении наклонной скважины, для передачи данных на поверхность можно использовать телеметрическую систему с гидроимпульсным каналом связи или любую другую подходящую систему передачи данных. С помощью подобных средств передачи данных, можно посылать в средство управления наклонной скважиной сигнал управления, запускающий ряд действий управления, требуемых для желаемой коррекции направления бурения. Толкатель (не показан) предпочтительно обеспечен для прижатия системы абразивно-струйного перфорирования к нижней части скважины 1. Лучшие результаты получают, когда сила прижатия не намного больше, чем сила, требуемая для удерживания экскаваторного инструмента 6 у нижней части, чтобы избегать нежелательного износа на экскаваторном инструменте 6, изгиба системы и потери направляющего управления. Таким образом, сила прижатия предпочтительно является достаточной только для того, чтобы противодействовать осевой силе отдачи абразивной струи и силам трения в толкателе и между абразивной системой гидромонитора и стенкой скважины. Как правило, сила прижима значительно ниже 10 кН. Подходящая абразивная струя содержит смесь, включающую в себя текучую среду, типа бурового раствора, и некоторое управляемое количество абразивных частиц. Эрозионная мощность струи коррелирует с полной мощностью, передаваемой в абразивных частицах, захваченных в смеси. Она зависит от удельного массового расхода абразивных частиц и от квадрата скорости абразивных частиц. Таким образом, один способ модулирования эрозионной мощности абразивной струи состоит в модулировании скорости абразивных частиц. Когда абразивная струя создается в гидромониторе, содержащем ускорительное сопло, скорость текучей среды приводит к перепаду давления в ограничении потока. Квадрат скорости текучей среды, ускоряемой в ограничении потока, в идеале равен удвоенному перепаду давления, деленному на плотность текучей среды. Поскольку абразивные частицы вовлечены в текучую среду, эрозионная мощность абразивной струи пропорциональна перепаду давления. Другой способ модулирования эрозионной мощности абразивной струи состоит в модулировании удельного массового расхода абразивных частиц в абразивной струе. Этого наиболее предпочтительно можно достигнуть, модулируя количество абразивных частиц в смеси. Когда количество подобных частиц больше, полная эрозионная мощность абразивной струи увеличивается так, что большая часть формации будет разрушена. Модуляция количества абразивных частиц в смеси не влияет на механическое контактное усилие между системой бурения и формацией. Как показано на фиг. 1, отметим, что абразивные частицы будут вовлечены в обратный поток бурового раствора через выкопанную скважину, проходящий, например, через кольцеобразное пространство 16 между скважиной 1 и системой (6, 12, 8) бурения. Для уменьшения концентрации абразивных частиц, подлежащих перемещению полностью назад к поверхности, предпочтительно обеспечить систему бурения, предпочтительно экскаваторный инструмент 6, со средством рециркуляции, выполненным с возможностью рециркуляции по меньшей мере части абразивных частиц из обратного потока от расположенного ниже потока соударения с формацией назад в абразивную струю 10. Абразивные частицы, подлежащие рециркуляции, можно смешивать с новым потоком бурового раствора, например, в смесительной камере, в которую впускаются и новый поток бурового раствора, и рециркулирующие абразивные частицы. Количество абразивных частиц в смеси можно модулировать, модулируя скорость, с которой рециркулирующие абразивные частицы направляются к смесительной камере. Фиг. 2 схематично изображает предпочтительный вариант осуществления экскаваторного инструмента 6 с возможностью рециркуляции, подходящей для использования в системе фиг. 1 при применении абразивных частиц, содержащих способные намагничиваться вещества, например, такие как стальная дробь или стальные опилки. Предпочтительный экскаваторный инструмент 6 обеспечен продольным проходом 11 для бурового раствора, который на одном своем конце находится в связи по текучей среде с каналом для бурового рас-3 007710 твора, обеспеченным в колонне 8 бурильных труб, а на другом своем конце находится в связи по текучей среде с гидромонитором. Гидромонитор содержит смесительную камеру 9, которая соединена с проходом 11 для бурового раствора через первое впускное отверстие 3 для бурового раствора. Смесительная камера 9 также находится в связи по текучей среде со вторым впускным отверстием 4 для абразивных частиц и со смесительным соплом 5, ведущим к соплу для впрыскивания потока бурового раствора и абразивных частиц напротив формации во время выкапывания скважины 1 в формации 2. Гидромонитор также обеспечен элементом магнитного материала 14 на стороне смесительной камеры 9, которая находится напротив впускного отверстия 4 абразивных частиц, но указанный элемент является необязательным. Смесительное сопло 5 выполнено над необязательной опорой 19 и наклонено относительно продольного направления системы под углом наклона 15-30 относительно оси вращения, но можно использовать другие углы. Предпочтительно угол наклона составляет приблизительно 21, и он является оптимальным для абразивного разрушения нижней части буровой скважины посредством вращения всего инструмента в буровой скважине вокруг оси. Смесительная камера 9 и смесительное сопло 5 выровнены с соплом выпускного отверстия под одним и тем же углом для достижения оптимального ускорения абразивных частиц. Проход 11 для бурового раствора выполнен с возможностью обхода средств для транспортировки магнитных частиц, и это средство включено в экскаваторный инструмент 6 в качестве части рециркуляционной системы для магнитных абразивных частиц. Средство включает опорный элемент в виде слегка суженного рукава 15 для обеспечения опорной поверхности, проходящей вокруг средства транспортировки в виде, по существу, цилиндрического удлиненного магнита 7. Магнит 7 создает магнитное поле для удерживания магнитных частиц на опорной поверхности 15. Проход 11 для бурового раствора выполнен неподвижным относительно опорной поверхности 15 и смесительной камеры 9. Проход 11 для бурового раствора имеет нижний конец, расположенный вблизи впускного отверстия 4 для абразивных частиц. В настоящем варианте осуществления проход 11 для бурового раствора образован с внутренней стороны гребня в осевом направлении, и гребень находится в выступающем контакте с опорной поверхностью 15. Проход 11 для бурового раствора в качестве альтернативы можно выполнить автономно от опорной поверхности способом, подобным способу, показанному и описанному в международной публикации WO 02/34653 со ссылкой на ее фиг. 4, или в смещенном от оси направлении. Впускное отверстие 4 для абразивных частиц расположено у нижнего конца гребня. Цилиндрический магнит 7 образован из восьми магнитов 7 а-7h меньшего размера, сложенных вместе. Также можно использовать другое количество магнитов меньшего размера. Каждый магнит 7 а-7h имеет диаметрально противоположные полюса N и S, и магниты сложены таким способом, что каждая из двух, по существу, спиралевидных диаметрально противоположных полос образована полюсами N и S. Для данного описания магнитный полюс является областью на поверхности магнита или на опорной поверхности, на которой линии магнитного поля пересекают поверхность магнита или опорную поверхность, таким образом являющуюся областью истока или стока для линий магнитных полей. Непосредственно рядом с диаметрально противоположными полосами, образованными полюсами,обеспечены спиралевидные углубления для получения спиралевидных полос, имеющих магнитную проницаемость ниже, чем у спиралевидных полос, включающих в себя полюса. Из-за более высокой магнитной проницаемости магнитного материала, чем у менее магнитного материала, который заполняет углубления (газ, текучая среда или частицы песка), линии внутреннего магнитного поля преимущественно следуют за материалом магнита, а не за материалом, содержащимся в углублении. Таким образом,существует сильная градиентная зона между полосами, содержащими полюса, и углублениями. Вместо углублений, содержащих газ, текучую среду или частицы песка, в выемках может быть вакуум. Предпочтительно углубление достигает глубины относительно цилиндрической окружности магнита, которая является аналогичной или больше, чем расстояние между промежутком между поверхностью магнита в первой полосе и опорной поверхностью. Магнит 7 имеет центральный продольный вал 18 и способен вращаться относительно рукава 15 и относительно центрального продольного вала 18. Обеспечено средство привода, которое более подробно будет описано ниже, чтобы приводить в действие вал 18 и таким образом вращать магнит 7. Короткая суженная секция 21 обеспечена на нижнем конце магнита 7. Опорная поверхность на рукаве 15 обеспечена соответствующим коническим сужением таким образом, что впускное отверстие 4 для абразивных частиц обеспечивает связь по текучей среде между опорной поверхностью 15, окружающей суженную секцию 21, и смесительной камерой 9. Коническое сужение предпочтительно основано на таком же угле, что и вышеупомянутый угол смесительной камеры 9 и смесительного сопла 5. Магнит 7 показан более подробно на фиг. 3, на виде в поперечном разрезе (фиг. 3 а), продольном виде (фиг. 3b) нижней части магнита, а представленная здесь цилиндрическая поверхность показана развернутой плоскостью в плоскости бумаги (фиг. 3 с). Область уменьшенной магнитной проницаемости обеспечена в форме спиралевидного углубления 26 во внешней поверхности магнита 7, рядом с полюсами, фиг. 3 а изображает круглые контуры 24 во-4 007710 круг диаметрально противоположных полюсов, соединенных, по существу, прямолинейными контурами 25. Прямолинейные контуры соответствуют углублению 26, а круглые контуры - частям магнита, содержащим полюса. Наклонные тонкие линии на фиг. 3b изображают переходный участок между круглыми контурами и, по существу, прямолинейными контурами. На фиг. 3 с вертикально размечена высота магнита, который разделен на магниты 7 а-7h меньшего размера, а горизонтально видна поверхность по всем азимутальным направлениям между 0 и 360. Как можно заметить, магниты 7 а-7h меньшего размера выполнены так, что их индивидуальные полюса выровнены в двух спиралевидных полосах, в порядке NSSNNSSN или SNNSSNNS. Угол 6 спиралевидного углубления 26 с плоскостью, перпендикулярной валу 18, составляет 53. При функционировании предпочтительный экскаваторный инструмент фиг. 2 работает следующим образом. Инструмент соединен с нижним концом колонны 8 бурильных труб, которую вводят с поверхности 13 в буровую скважину. Поток бурового раствора накачивают с помощью подходящего насоса (не показан), расположенного на поверхности, через канал для бурового раствора колонны 8 бурильных труб и проход 11 для текучей среды, в смесительную камеру 9. Во время накачивания поток обеспечивается небольшим количеством абразивных частиц в форме стальной дроби. Впускное отверстие 3 выполнено с ограничением потока, в котором присутствует перепад давления, приводящий к ускорению бурового раствора. Поток течет от смесительной камеры 9 через смесительное сопло 5 и, таким образом, впрыскивается в нижнюю часть скважины. Одновременно колонну 8 бурильных труб вращают описанным выше способом. Обратный поток текучей среди и абразивных частиц течет от нижней части буровой скважины через кольцевой зазор 16 в буровой скважине в обратном направлении, к поверхности. Таким образом,обратный поток проходит вдоль рукава 15. Магнит 7 индуцирует магнитное поле, распространяющееся к внешней поверхности рукава 15 и за ее пределы. Поскольку поток проходит вдоль рукава 15, абразивные частицы в потоке отделяются от потока магнитными силами, производимыми магнитом 7, который притягивает частицы к внешней поверхности рукава 15. Поток бурового раствора, который теперь, по существу, свободен от абразивных магнитных частиц,течет далее через буровую скважину к насосу на поверхности и рециркулирует через колонну бурильных труб после удаления бурового шлама. Магнитные частицы, удерживаемые на опорной поверхности 15, притягиваются к полосе, имеющей самое высокое магнитное поле. Одновременно с перекачиванием потока бурового раствора магнит 7 вращают относительно своего вала 18 в направлении вращения, которое является противоположным направлению, определяемому спиралевидной полосой. Из-за вращения магнита 7 присутствие зоны градиента вызывает силу, прикладываемую к магнитным частицам в направлении, перпендикулярном зоне градиента, которая имеет направленный вниз компонент, таким образом вынуждая частицы следовать за спиралевидным направленным вниз движением к впускному отверстию 4. Таким образом, магнит 7 функционирует не только как отделитель абразивных частиц от обратного потока, но также и как средство транспортировки, в котором движение магнита вызывает транспортировку абразивных частиц. Когда частицы достигают впускного отверстия 4, поток бурового раствора, текущий в смесительную камеру 9, снова захватывает частицы. В следующем цикле абразивные частицы снова впрыскиваются в нижнюю часть скважины и впоследствии текут по направлению вверх через буровую скважину. Затем цикл непрерывно повторяется. Таким образом достигают того, что колонна бурильных труб/насосное оборудование, по существу, не повреждаются абразивными частицами, поскольку они циркулируют только через нижнюю часть колонны бурильных труб, в то время как буровой раствор циркулирует через всю колонну 8 бурильных труб и насосное оборудование. В случае, если малая доля частиц течет через буровую скважину к поверхности 13, ее можно вернуть с помощью потока текучей среды, текущего через колонну 8 бурильных труб. Механизм струйного насоса в смесительном сопле 5 вырабатывает сильный поток бурового раствора от смесительной камеры 9 к смесительному соплу 5. Механизм струйного насоса дополнительно поддерживает поток магнитных частиц в смесительную камеру 2. Больший диаметр смесительного сопла 5 по сравнению с соплом впускного отверстия для бурового раствора (между впускным отверстием 3 и смесительной камерой 9) приводит к соответствующему захвату бурового раствора и магнитных абразивных частиц, поступающих в смесительную камеру через второе впускное отверстие 4. Взаимодействие между захваченным буровым раствором и магнитными частицами также способствует эффективному сбрасыванию частиц с опорной поверхности 15 в смесительную камеру 9. Если используется магнитный корпус 14 на стороне, противоположной впускному отверстию 4 для абразивных частиц, то он отбирает часть магнитного поля, производимого магнитом 7, в смесительную камеру 9. В результате магнитная сила, притягивающая магнитные абразивные частицы к опорной поверхности 15, становится менее сильной для магнитных частиц, которые поступают в область впускного отверстия 4 для абразивных частиц. Таким образом, прохождение магнитных абразивных частиц через впускное отверстие 4 в смесительную камеру 2 дополнительно облегчается. Магнитные абразивные час-5 007710 тицы имеют тенденцию формировать цепочки от нижнего конца опорной поверхности 15 к магнитному корпусу 14, которые пересекают смесительную камеру 9. В то же время частицы в этих цепочках взаимодействуют с потоком бурового раствора, проходящего через смесительную камеру 9 от впускного отверстия 3 к смесительному соплу 5, и таким образом, эти частицы будут захватываться этим потоком. В предпочтительном варианте осуществления на опорной поверхности обеспечены одна или несколько относительно коротких, ориентированных, по существу, по оси секций гребня, посредством чего опорная поверхность проходит за пределы секций гребня в направлении секций гребня. При этом достигают более однородного распределения магнитных частиц по опорной поверхности, а также улучшения скорости транспортировки магнитных частиц в осевом направлении по опорной поверхности. Подходящие магниты для описанной рециркуляционной системы можно изготавливать из любого способного сильно намагничиваться материала, включая NdFeB, SmCo и AlNiCo-5 или их комбинации. Предпочтительно магнит также имеет запас магнитной энергии по меньшей мере 140 кДж/м 3 при комнатной температуре, предпочтительно свыше 300 кДж/м 3 при комнатной температуре, типа магнитов,основанных на NdFeB. Высокий запас энергии обеспечивает возможность для более короткой осевой контактной длины опорной поверхности с обратным потоком и, следовательно, более сильного сужения опорной поверхности, что выгодно для скорости переноса в осевом направлении. Также требуется меньше энергии для вращения магнита. Рукав 15 и перепускной канал 1 бурового раствора обычно выполняют из немагнитного материала. Их подходящим образом выполняют обработкой на станке из единого куска материала так, чтобы получать оптимальную механическую прочность. Нашли особенно подходящими специальные сплавы, включающие в себя высокопрочные коррозионностойкие немагнитные Ni-Cr сплавы, включая сплав, продаваемый под названием Inconel 718 или Allvac 718. Можно использовать другие материалы, включая В качестве альтернативы цилиндрическому магниту 7 на фиг. 2 внешний диаметр магнита и внутренний диаметр внутренней стенки опорного рукава 15 можно делать уменьшенными, с уменьшенной осевой высотой. Магниты меньшего размера, из которых собран магнит, могут иметь форму усеченного конуса, чтобы получить суженную форму разделительного магнита. Промежуток между магнитом и внутренней стенкой опорного рукава также можно уменьшать, так же как толщину стенки опорного рукава. Буровой раствор в абразивной струе может содержать магнитные абразивные частицы с концентрацией обычно до 10 об.%. Магнит предпочтительно приводят в действие при частоте вращения, превышающей частоту вращения колонны бурильных труб так, что модуляция частоты вращения магнита может модулировать скорость рециркуляции абразивных частиц в отдельном вращении экскаваторного инструмента 6. Обычно магнит можно приводить в действие с частотой вращения между 10 и 40 Гц. Вращение колонны бурильных труб или, по меньшей мере, экскаваторного инструмента обычно находится между 0,3 и 3 Гц. В общем, в системе, содержащей средство транспортировки для подачи абразивных частиц в абразивную струю, количество абразивных частиц в абразивной струе можно модулировать, модулируя скорость перемещения средства транспортировки. Преимущество этого состоит в том, что кроме электронного средства управления, никакое дополнительное механическое оборудование для модулирования эрозионной мощности абразивной струи не требуется. Например, в вышеупомянутом экскаваторном инструменте с магнитом 7, действующим как средство транспортировки, количеством абразивных частиц,подаваемых в смесительную камеру, можно управлять с помощью частоты вращения магнита. Для модулирования скорости переноса, обеспечено управляемое средство привода для приведения в действие средства транспортировки. Средство привода можно снабжать энергией с помощью энергетической системы наклонной скважины, извлекающей энергию из потока бурового раствора под давлением и подающей извлеченную энергию в средство транспортирования. Необходимо извлекать только небольшую часть гидравлической энергии, присутствующей в текучей среде, циркулирующей через скважину, обычно меньше 5%. Таким образом, генератор можно выполнять значительно меньшим, чем, на-6 007710 пример, турбина наклонной скважины или двигатель с объемным регулированием, который стремится преобразовывать большую часть доступной энергии для приведения в действие обычного бурового долота. Первый тип энергетической системы наклонной скважины, пример которой показан на фиг. 4, содержит электрический генератор 17, приводимый потоком 20 бурового раствора, например, посредством турбины или секции с обменным регулированием. Генерируемая электроэнергия подается в электрический двигатель 23, который соединен со средством транспортировки через выходной вал 18. Электрическим двигателем 23 может управлять электронная система 22 управления. Для преобразования требуемой мощности можно устанавливать последовательно несколько модулей турбины/генератора. Это может улучшить направляющую гибкость энергетической системы наклонной скважины, потому что такой модульный подход можно построить механически менее жестким, чем сборка немодульной турбины с аналогичной номинальной мощностью. Второй, альтернативный тип энергетической системы наклонной скважины (не показан) содержит пассивный гидравлический двигатель, например, типа турбины или секции двигателя с объемным регулированием, приводимого в действие потоком бурового раствора, где выходной вал пассивного гидравлического двигателя соединен со средством транспортирования. Для управления энергией на выходном валу обеспечено средство. Такое средство можно выполнить в виде средства управления потоком бурового раствора, управляющего потоком бурового раствора, протекающим через пассивный гидравлический двигатель, типа настраиваемого клапана, предпочтительно настраиваемого с помощью электроники клапана, последовательно с пассивным гидравлическим двигателем и/или параллельно в обходном канале, обходящем пассивный гидравлический двигатель. Возможный параллельный обходной канал раскрыт в патенте США 4396071. В качестве альтернативы, генератор можно устанавливать вокруг выходного вала, и он может действовать в качестве управляемого тормоза, который является настраиваемым с помощью электроники посредством регулирования нагрузки в цепи генератора. Настраиваемым с помощью электроники клапаном или нагрузкой можно управлять посредством электронной системы управления. В системах и первого (пример на фиг. 4), и второго типов эрозионную мощность абразивной струи с абразивной струей можно модулировать с помощью электронной системы 22 управления. Электронную систему управления можно выполнять с возможностью приема сигнала, отображающего положение области соударения абразивной струи вдоль ее траектории на нижней части скважины 1, который можно затем использовать для модуляции эрозионной мощности абразивной струи в зависимости от положения вдоль траектории. Сигнал можно принимать непосредственно от позиционного датчика наклонной скважины, расположенного около экскаваторного инструмента. Позиционный датчик можно подходящим образом размещать вместе с электронной системой 22 управления. Электронная система 22 управления может включать электронный модуль памяти, который хранит данные, включающие одно или более значений напряжения двигателя, тока, частоты вращения, температуры и другие данные. Выбор этих данных можно передавать на поверхность с помощью системы 27 измерения при бурении, когда она используется. Такую систему 27 измерения при бурении можно соединять с помощью электроники с электронной системой управления посредством охватываемого центровщика. Электронная система управления может быть программируемой так, чтобы можно было поддерживать или получать выбранные условия. Любые электронные компоненты можно помещать в атмосферную камеру или камеру сбалансированного давления. В системах и первого, и второго типов выходной вал и вал двигателя можно соединять с помощью магнитного сцепления или вращательного уплотнения в случае, если выходной вал вращается в атмосферной камере или камере сбалансированного давления. Выборочно можно использовать коробку передач между выходным валом электрического двигателя и валом двигателя средства транспортирования. В первом типе энергетической системы, обратное перемещение средства транспортирования можно получать, приводя электрический двигатель в обратном направлении. Перемещение средства транспортировки в обратном направлении имеет большое преимущество,заключающееся в том, что возможную перегрузку, получаемую в области действия средства транспортировки, можно облегчить, снова полностью изменяя направление движения и сбрасывая абразивные частицы снова в обратный поток. При этом можно избежать засорения рециркуляционной системы. В случае выполнения средства транспортировки в виде магнита перегрузка может произойти, например, во время простоя системы, например, происходящего во время подсоединения нового соединения бурильных труб к колонне бурильных труб. Возможная последовательность для запуска может включать обратное перемещение средства транспортировки во время первого этапа запуска, пока проходит обратный поток, переключая средство транспортировки на прямое, или нормальное, направление движения. Предпочтительно средство транспортировки переключают снова на обратное перемещение только перед окончанием действия экскаваторных работ. Его можно автоматически запускать, например,снижая скорость потока.-7 007710 ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система для бурения скважины в объекте, содержащая гидромонитор для создания абразивной струи, содержащей текучую среду, и для вдувания абразивной струи с эрозионной мощностью для соударения с объектом в области соударения, таким образом разрушая объект в области соударения, средство развертки для перемещения области соударения по выбранной траектории в скважине и средство модуляции для модулирования эрозионной мощности абразивной струи при перемещении области соударения по выбранной траектории, отличающаяся тем, что абразивная струя содержит смесь, содержащую текучую среду и множество абразивных частиц, и средство модуляции выполнено с возможностью модулирования количества абразивных частиц в смеси. 2. Система по п.1, отличающаяся тем, что средство развертки содержит вращательное средство для вращения абразивной струи относительно оси вращения, в соответствии с чем область соударения располагается со смещением относительно оси вращения. 3. Система по п.1 или 2, отличающаяся тем, что средство модуляции содержит средство управления модуляцией, выполненное с возможностью управления средством модуляции для модулирования эрозионной мощности абразивной струи относительно положения области соударения на выбранной траектории. 4. Система по любому из пп.1-3, отличающаяся тем, что содержит позиционный датчик для создания сигнала, отображающего положение области соударения на выбранной траектории. 5. Система по любому из пп.1-4, отличающаяся тем, что содержит навигационный датчик для обеспечения сигнала, отображающего направление выполнения бурения скважины в ходе проходки объекта. 6. Система по любому из пп.1-5, отличающаяся тем, что средство модуляции содержит средство для модулирования мощности, переходящей в кинетическую энергию абразивных частиц. 7. Система по любому из пп.1-6, отличающаяся тем, что средство модуляции содержит средство управления скоростью, выполненное с возможностью модулирования скорости абразивных частиц в абразивной струе. 8. Система по п.7, отличающаяся тем, что гидромонитор содержит ускорительное сопло, в котором поддерживается перепад давления, при этом средство управления скоростью содержит средство управления давлением, выполненное с возможностью модулирования перепада давления. 9. Система по п.1, отличающаяся тем, что содержит смесительную камеру для смешивания текучей среды с абразивными частицами и средство подачи абразивных частиц в смесительную камеру, при этом средство модуляции выполнено с возможностью модулирования скорости подачи абразивных частиц средством подачи в смесительную камеру для модулирования количества абразивных частиц в смеси. 10. Система по п.9, отличающаяся тем, что средство подачи абразивных частиц содержит средство рециркуляции по меньшей мере части абразивных частиц из обратного потока смеси, расположенной ниже области соударения с объектом в смесительную камеру, при этом средство модуляции выполнено с возможностью модулирования, по меньшей мере, скорости рециркуляции. 11. Система по п.9 или 10, отличающаяся тем, что средство подачи абразивных частиц содержит средство транспортировки абразивных частиц предпочтительно в виде подвижного магнита, при этом средство модуляции выполнено с возможностью модулирования, по меньшей мере, скорости транспортировки, обеспеченной средством транспортирования. 12. Система по п.11, отличающаяся тем, что средство транспортировки является подвижным, и перемещение средства транспортировки вызывает транспортировку абразивных частиц. 13. Система по п.11 или 12, отличающаяся тем, что средство транспортировки соединено с управляемой энергетической системой скважины для управления средством транспортировки предпочтительно для приведения средства транспортировки в движение. 14. Система по п.13, отличающаяся тем, что управляемая энергетическая система скважины содержит генератор электроэнергии, приводимый в действие потоком текучей среды, электрический двигатель, механически соединенный со средством транспортировки для приведения средства транспортировки в движение, при этом электрический двигатель электрически соединен с генератором электроэнергии через электронную систему управления. 15. Способ бурения скважины в объекте, содержащий следующие стадии: создание абразивной струи, содержащей текучую среду; вдувание абразивной струи с эрозионной мощностью для соударения с объектом в области соударения, таким образом разрушая объект в области соударения; перемещение области соударения по выбранной траектории в скважине; модулирование эрозионной мощности абразивной струи при перемещении области соударения; отличающийся тем, что абразивная струя содержит смесь, содержащую текучую среду и множество абразивных частиц, средство модуляции модулирует количество абразивных частиц в смеси. 16. Способ по п.15, отличающийся тем, что модулирование эрозионной мощности абразивной струи содержит модулирование мощности, переходящей в кинетическую энергию абразивных частиц.
МПК / Метки
Метки: бурения, система, способ, объекте, скважины
Код ссылки
<a href="https://eas.patents.su/11-7710-sistema-i-sposob-bureniya-skvazhiny-v-obekte.html" rel="bookmark" title="База патентов Евразийского Союза">Система и способ бурения скважины в объекте</a>
Способ образования пузырьков газа в маслообразных жидкостях, флюид для бурения или технического обслуживания скважины и способ бурения скважины
Номер патента: 4505
Опубликовано: 29.04.2004
Автор: Морган Джули Б.
МПК: C09K 7/06
Метки: жидкостях, образования, способ, технического, флюид, бурения, маслообразных, газа, скважины, обслуживания, пузырьков
Формула / Реферат:
1. Способ образования пузырьков газа в маслообразных жидкостях, отличающийся тем, что к маслообразной жидкости сначала добавляют силиконовое масло и затем обрабатывают полученную смесь в присутствии газа с приложением к ней усилий от механических устройств. 2. Способ по п.1, отличающийся тем, что маслообразную жидкость выбирают из группы, включающей в себя нефтяные масла или их фракции, a-олефины, олефины с внутренними ненасыщенными связями,...
Раствор для бурения или эксплуатации скважины, способ бурения или эксплуатации скважины в подземной формации
Номер патента: 3014
Опубликовано: 26.12.2002
Автор: Бруки Томми Ф.
МПК: C09K 7/02
Метки: скважины, подземной, бурения, способ, раствор, эксплуатации, формации
Формула / Реферат:
1. Раствор для бурения или эксплуатации скважины, отличающийся тем, что он содержит водную жидкость, включающую в себя, по меньшей мере, один загуститель, афронобразующее ПАВ и афроны, причем раствор имеет вязкость при низкой скорости сдвига, измеренную на вискозиметре Брукфильда при 0,5 об./мин и составляющую, по меньшей мере, 20000 мПаЧс. 2. Раствор по п.1, отличающийся тем, что концентрация афронов в растворе составляет менее 20 об.% от...
Каротажная система, спускаемая в колонну бурильных труб и способ бурения скважины с проведением в ней исследований с использованием такой системы
Номер патента: 2063
Опубликовано: 24.12.2001
Автор: Рюния Дауве Йоханнес
МПК: E21B 47/00
Метки: исследований, система, скважины, системы, способ, колонну, использованием, бурильных, каротажная, труб, бурения, проведением, спускаемая, ней
Формула / Реферат:
1. Система бурения ствола скважины в земной формации и проведения каротажа скважины, содержащая измерительный скважинный зонд и колонну бурильных труб, имеющую продольный канал, предназначенный для циркуляции по нему промывочного раствора при бурении, снабженную отверстием, обеспечивающим гидравлическую связь между каналом и наружным пространством по отношению к колонне бурильных труб, канал вместе с отверстием расположены таким образом, что...
Флюид для бурения или технологического обслуживания скважины и способ бурения или технологического обслуживания скважины
Номер патента: 2952
Опубликовано: 26.12.2002
Авторы: Бруки Томми Ф., Коуэн Джек К.
МПК: C09K 7/06
Метки: флюид, бурения, обслуживания, технологического, способ, скважины
Формула / Реферат:
1. Флюид для бурения или технологического обслуживания скважины, отличающийся тем, что он содержит масляную жидкость в качестве непрерывной жидкой фазы, включающую в себя, по крайней мере, один загуститель, придающий флюиду вязкость при низкой скорости сдвига, определенную на вискозиметре Брукфильда при 0,5 об./мин и равную, по меньшей мере, приблизительно 10000 мПа.с, по меньшей мере, одно афронобразующее ПАВ и афроны. 2. Флюид по п.1,...
Способ бурения и завершения скважины для добычи углеводородов
Номер патента: 2563
Опубликовано: 27.06.2002
Авторы: Лохбек Вильхельмюс Христианюс Мария, Маркец Франц, Стюарт Роберт Брюс
МПК: E21B 7/20
Метки: добычи, способ, завершения, бурения, углеводородов, скважины
Формула / Реферат:
1. Способ бурения и завершения скважины для добычи углеводородов, содержащий этапы а) бурения секции скважины в подземных пластах, ввода секции обсадной трубы в пробуренную секцию скважины и радиального расширения и закрепления секции обсадной трубы в пределах указанной секции скважины, б) погружения бурового долота через расширенную секцию обсадной трубы и бурения последующей секции скважины, ввода следующей секции обсадной трубы в указанную...
Предыдущий патент: Шарнирно-рычажный механизм переменной структуры
Следующий патент: Экстракция кислородсодержащих веществ из потока углеводородов
Случайный патент: Новые замещенные димерные соединения, способ их получения и фармацевтические композиции, содержащие их