Способ сбора морских геофизических данных (варианты)
Формула / Реферат
1. Способ сбора геофизических данных, включающий следующие шаги:
буксируют оборудование для сбора геофизических данных позади сейсморазведочного судна в водоеме, причем указанное оборудование включает по меньшей мере один геофизический источник и группу сейсмоприемных кос, тянущихся за указанным судном;
определяют геодезическое местоположение первой опорной точки управления, находящейся на переднем конце группы сейсмоприемных кос, причем эту первую опорную точку управления определяют как среднее значение положений соответствующих концевых устройств переднего конца сейсмоприемных кос;
определяют опорное направление, являющееся направлением от указанной первой опорной точки управления к выбранному местоположению на сейсморазведочном судне;
отклоняют в поперечном направлении, посредством устройства передачи бокового усилия, как по меньшей мере одну сейсмоприемную косу, входящую в группу сейсмоприемных кос, так и указанный по меньшей мере один геофизический источник, причем это отклонение в поперечном направлении основано на определенном геодезическом местоположении указанной первой опорной точки управления и указанном определенном опорном направлении.
2. Способ по п.1, отличающийся тем, что включает определение требуемого поперечного положения источника по отношению к первой опорной точке управления и управление геофизическим источником таким образом, чтобы геофизический источник придерживался требуемого поперечного положения.
3. Способ по п.1, отличающийся тем, что включает управление сейсморазведочным судном таким образом, чтобы указанная первая опорная точка управления следовала по предварительно выбранной траектории движения.
4. Способ по любому из предыдущих пунктов, отличающийся тем, что в нем определяют геодезическое местоположение второй опорной точки управления, представляющей собой передний конец другой из указанных сейсмоприемных кос, входящей в группу сейсмоприемных кос, и отклоняют в поперечном направлении указанную другую сейсмическую косу под влиянием определенного геодезического местоположения второй опорной точки управления и определенного опорного направления.
5. Способ по любому из предыдущих пунктов, отличающийся тем, что определение указанного опорного направления включает последовательное определение геодезического положения первой опорной точки управления и определение указанного опорного направления по результатам последовательного определения геодезического положения указанной первой опорной точки управления.
6. Способ по п.5, отличающийся тем, что он включает временную фильтрацию указанного определенного опорного направления.
7. Способ по любому из пп.1-4, отличающийся тем, что отклонение в поперечном направлении указанной по меньшей мере одной сейсмоприемной косы осуществляют в направлении опорной линии, проходящей через указанную первую опорную точку управления вдоль указанного опорного направления.
8. Способ сбора геофизических данных, включающий следующие шаги:
буксируют оборудование для сбора геофизических данных позади сейсморазведочного судна в водоеме, причем указанное оборудование включает по меньшей мере один геофизический источник и группу сейсмоприемных кос, тянущихся за указанным судном;
определяют геодезическое местоположение опорной точки управления, находящейся на переднем конце группы сейсмоприемных кос, причем эту опорную точку управления определяют как среднее значение положений соответствующих концевых устройств переднего конца сейсмоприемных кос;
управляют сейсморазведочным судном таким образом, чтобы опорная точка управления следовала по предварительно выбранной траектории движения; и
управляют указанным геофизическим источником на основании указанной опорной точки управления.
9. Способ по п.8, отличающийся тем, что управление указанным геофизическим источником включает определение требуемого поперечного положения источника по отношению к опорной точке управления и управление геофизическим источником таким образом, чтобы геофизический источник придерживался требуемого поперечного положения.
10. Способ сбора геофизических данных, включающий следующие шаги:
буксируют оборудование для сбора геофизических данных позади сейсморазведочного судна в водоеме, причем указанное оборудование включает геофизический источник и группу сейсмоприемных кос, тянущихся за указанным судном;
определяют геодезическое местоположение опорной точки управления, находящейся на переднем конце группы сейсмоприемных кос, причем эту опорную точку управления определяют как среднее значение положений соответствующих концевых устройств переднего конца сейсмоприемных кос;
определяют требуемое поперечное положение источника по отношению к опорной точке управления;
управляют геофизическим источником таким образом, чтобы геофизический источник придерживался требуемого поперечного положения;
определяют опорное направление, являющееся направлением от указанной опорной точки управления к выбранному местоположению на сейсморазведочном судне; и
отклоняют в поперечном направлении, посредством устройства передачи бокового усилия по меньшей мере одну сейсмоприемную косу на основе указанной опорной точки управления и указанного опорного направления.

Текст
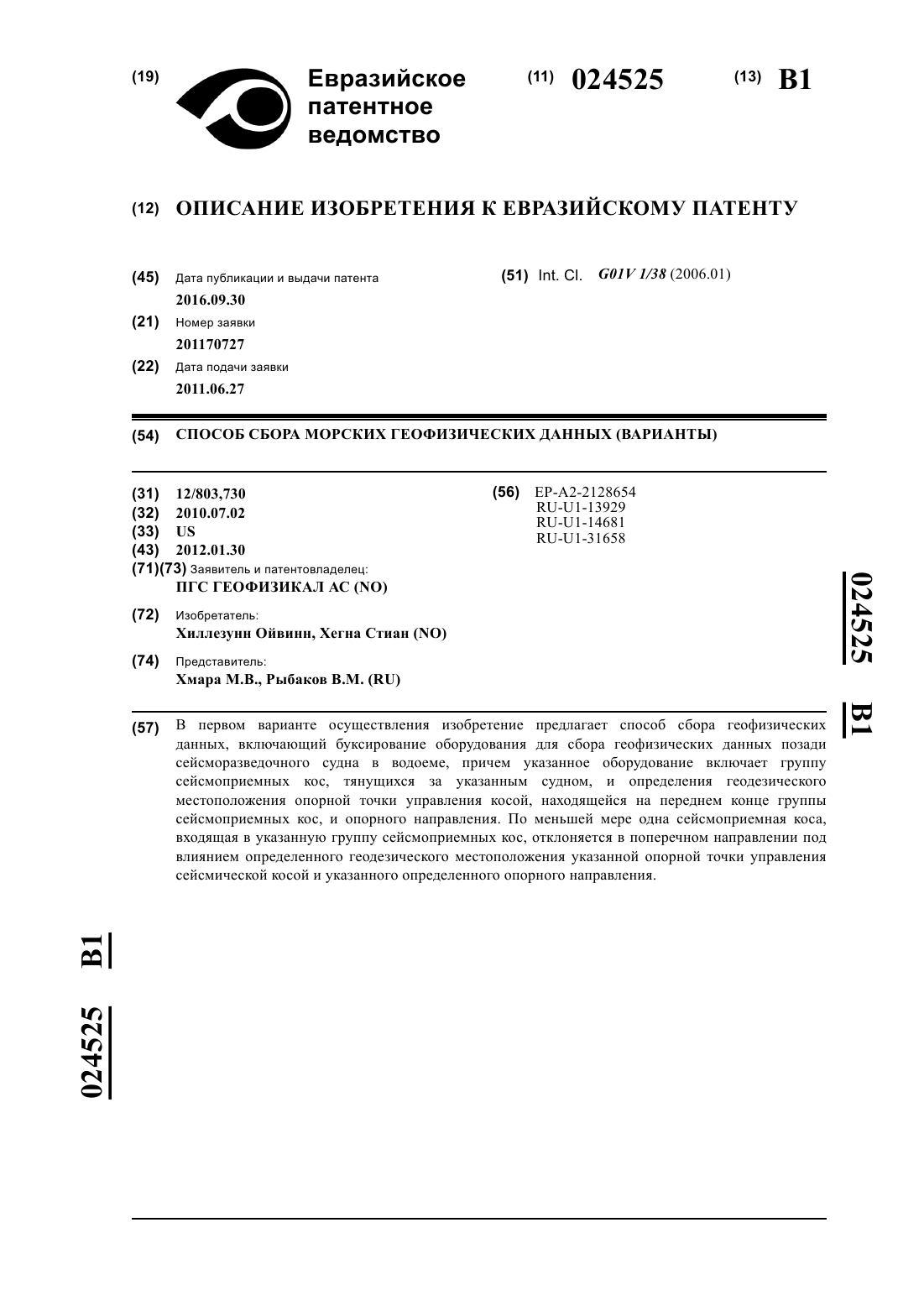
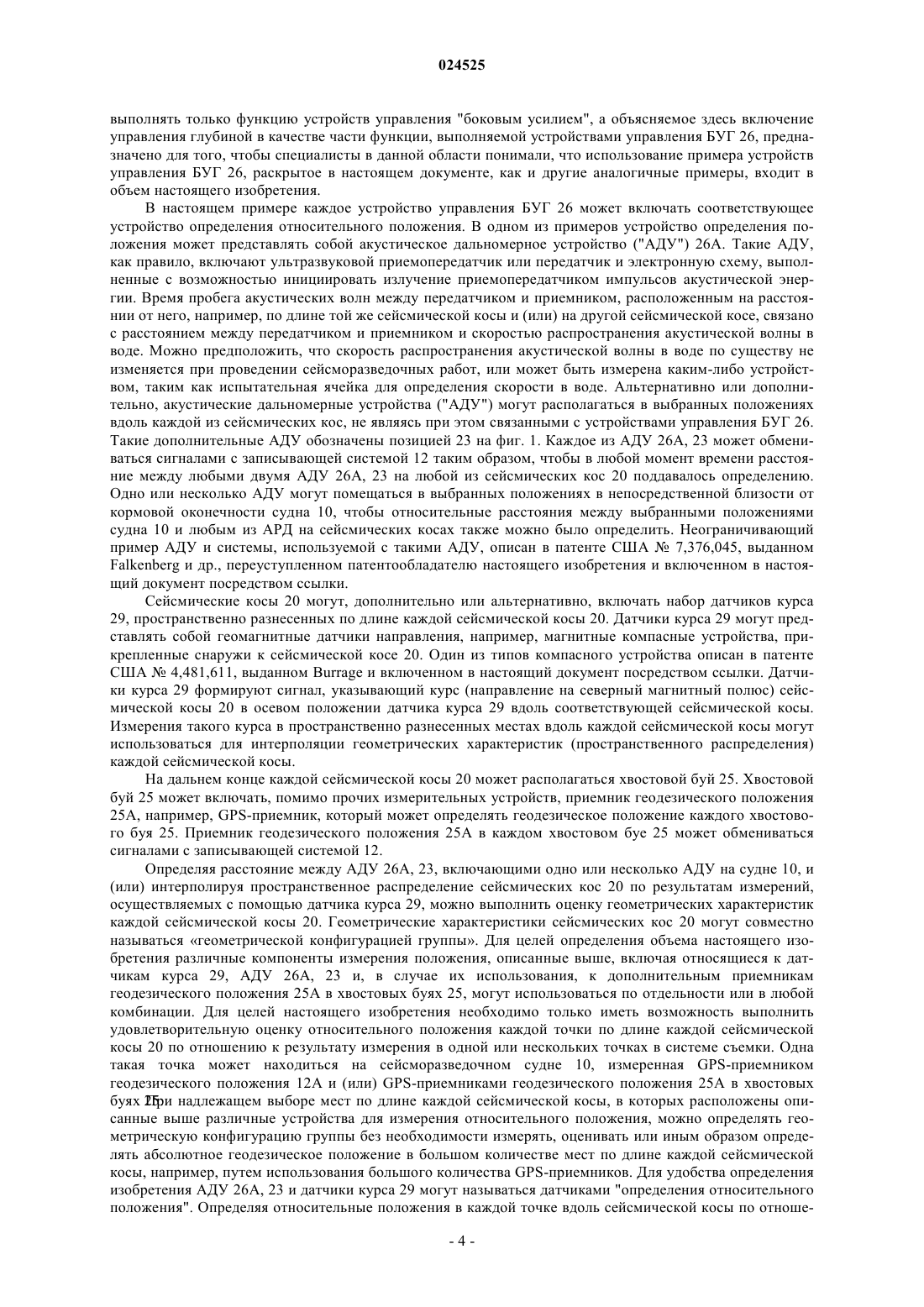
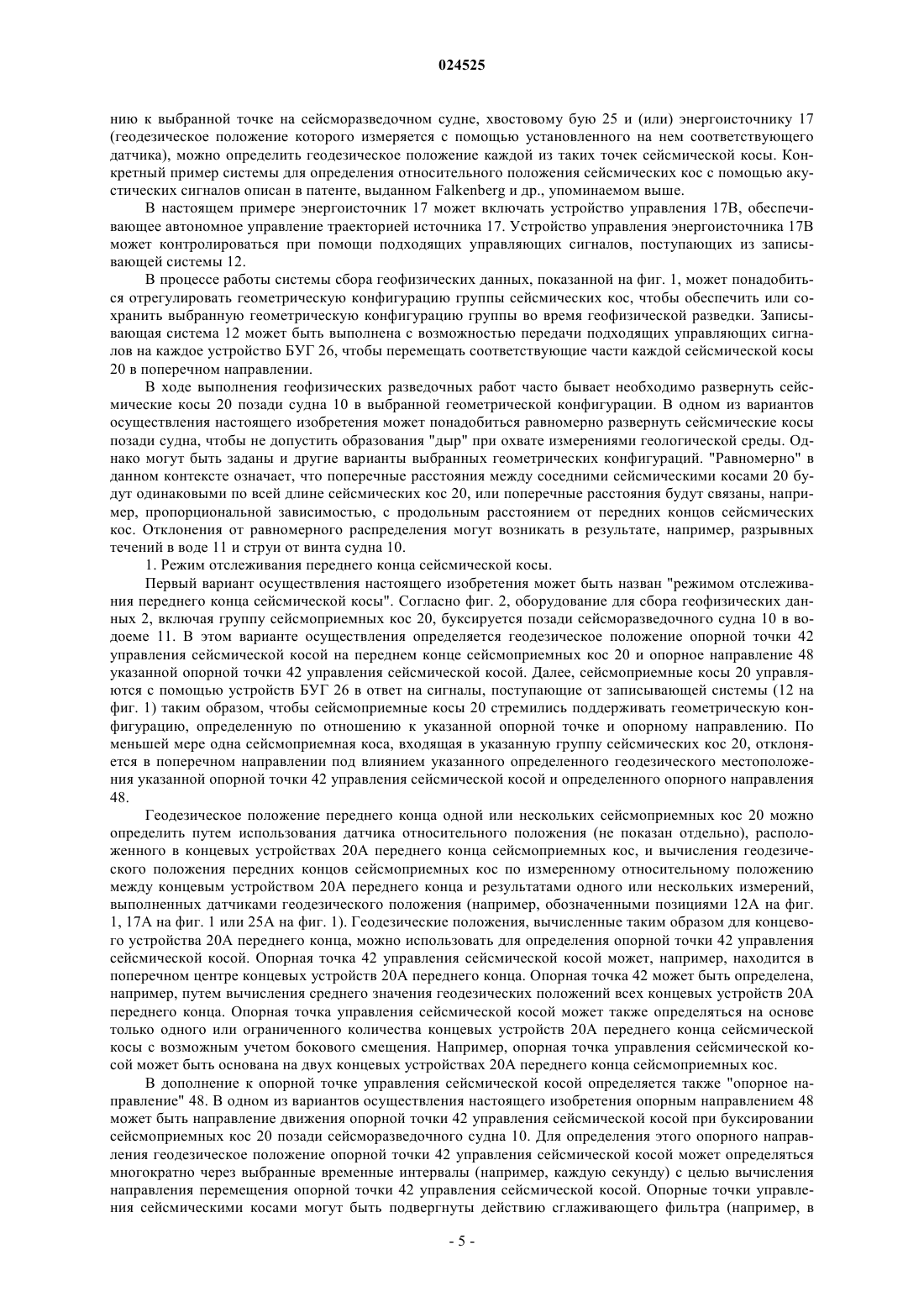
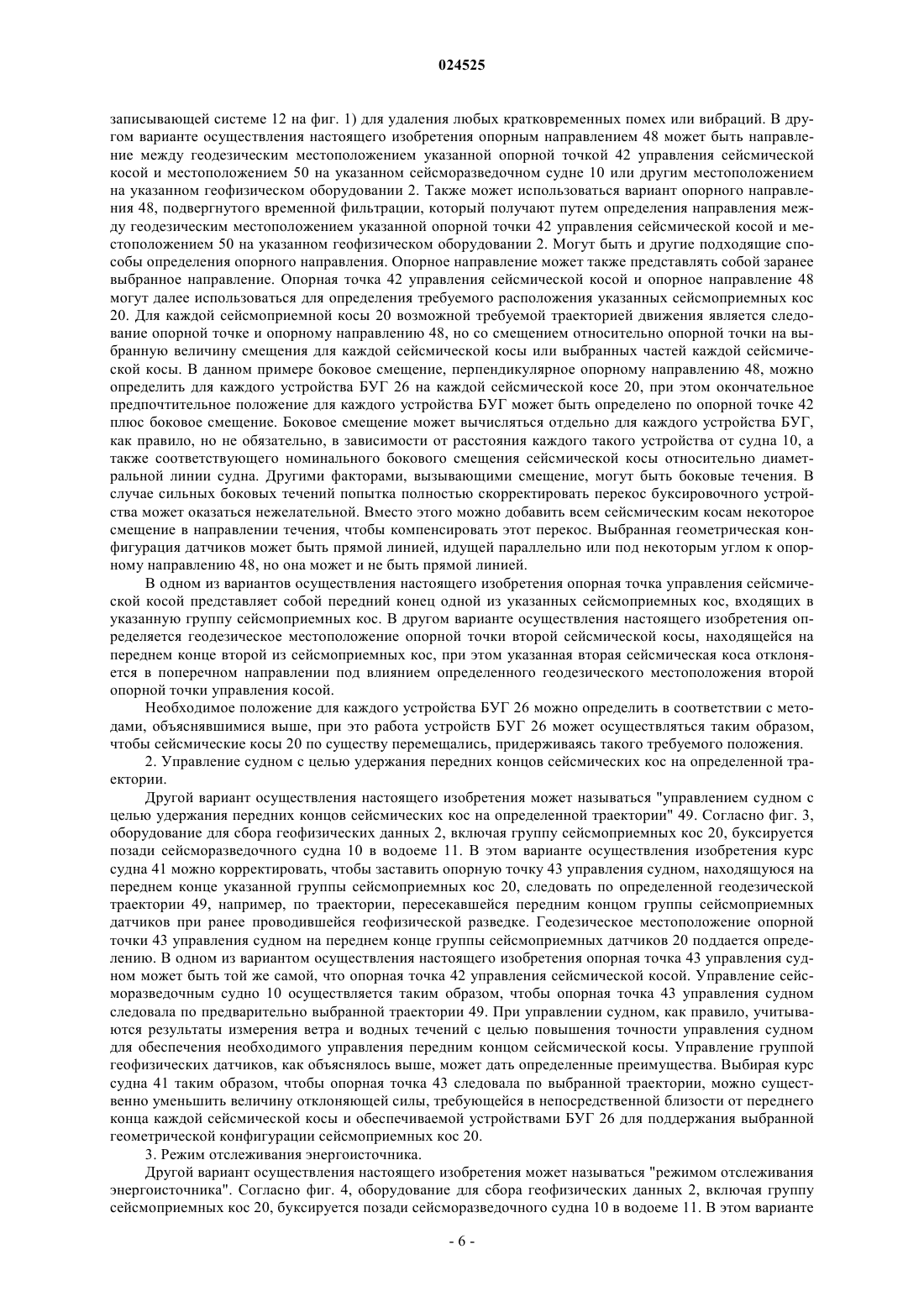
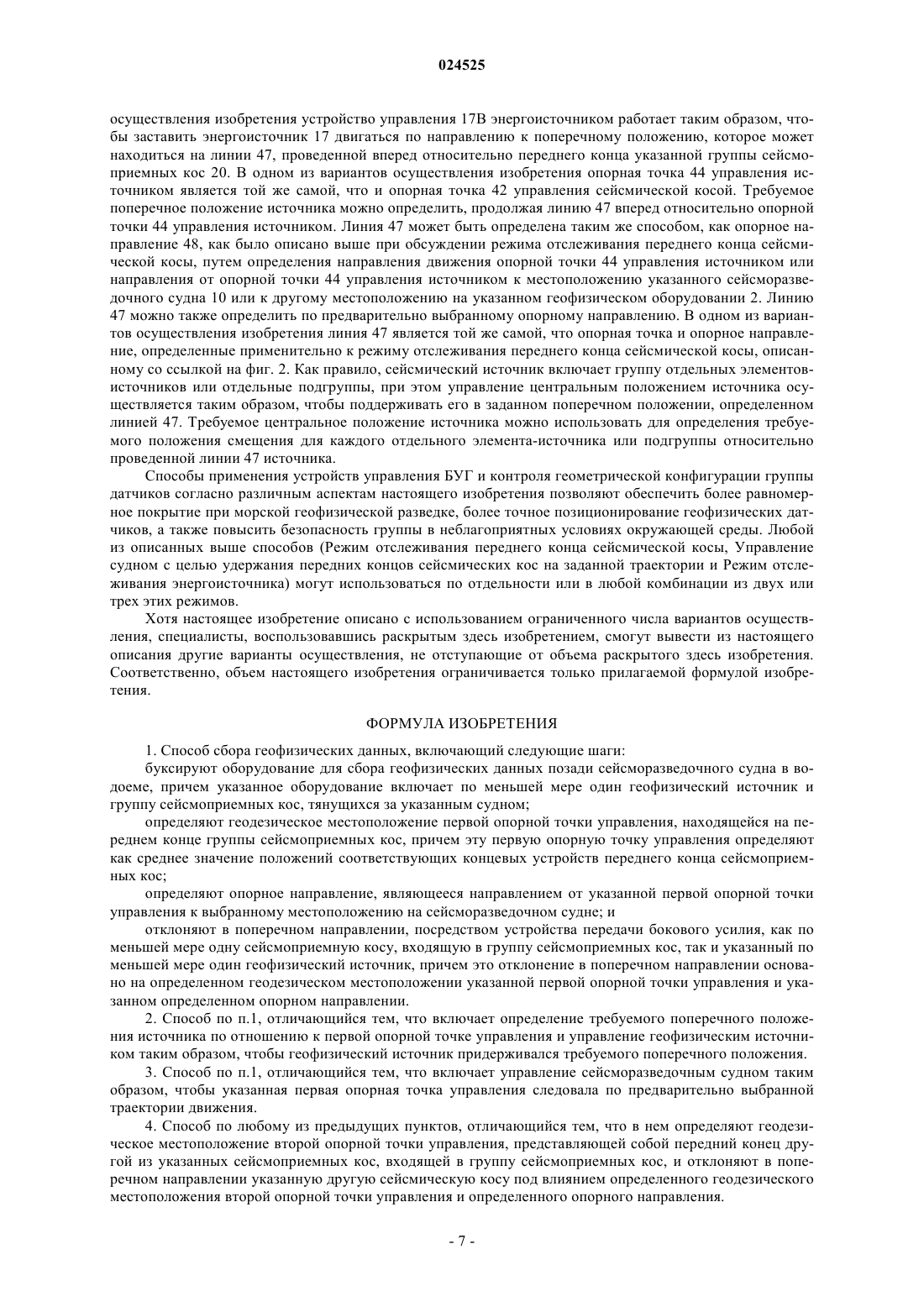
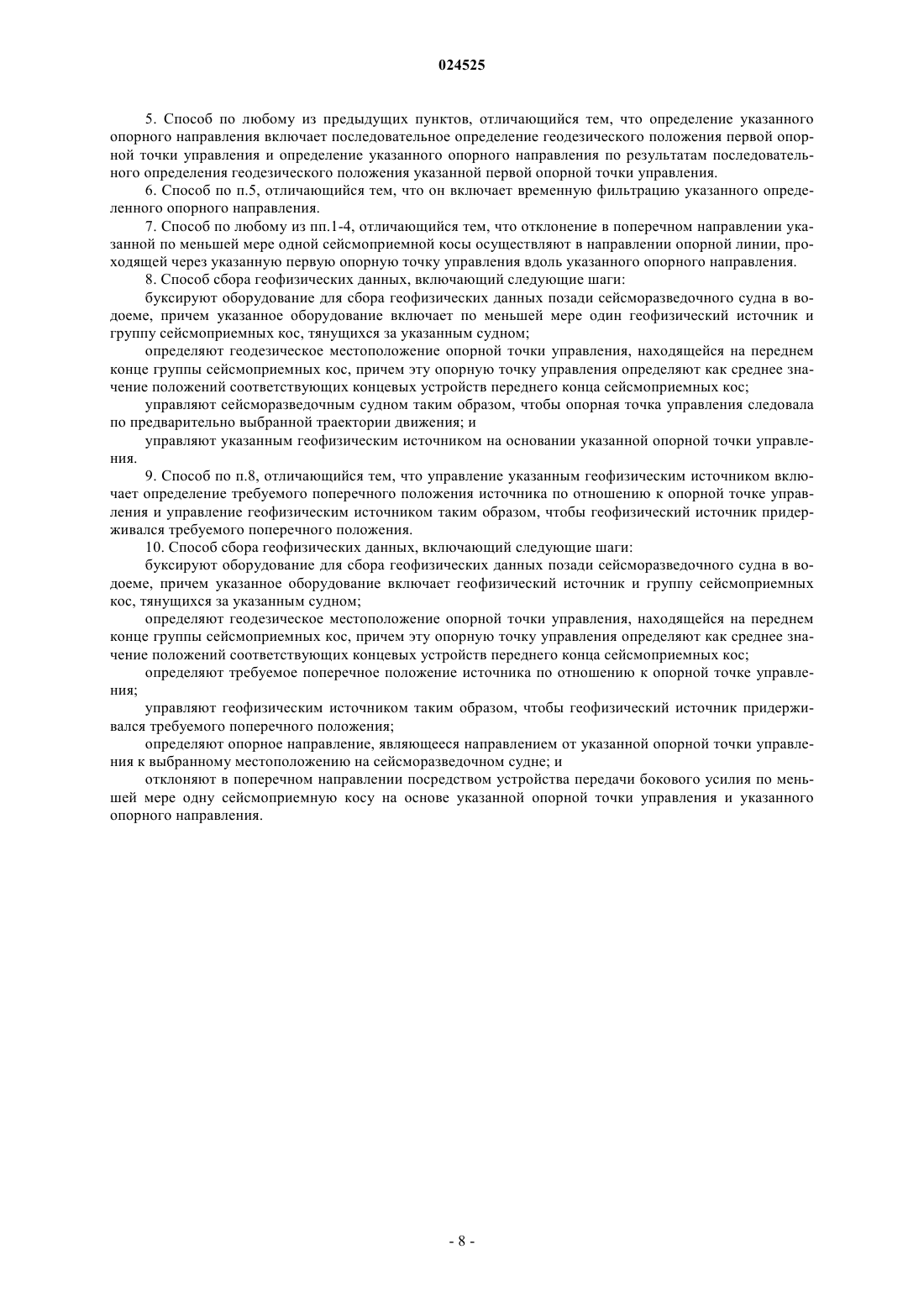
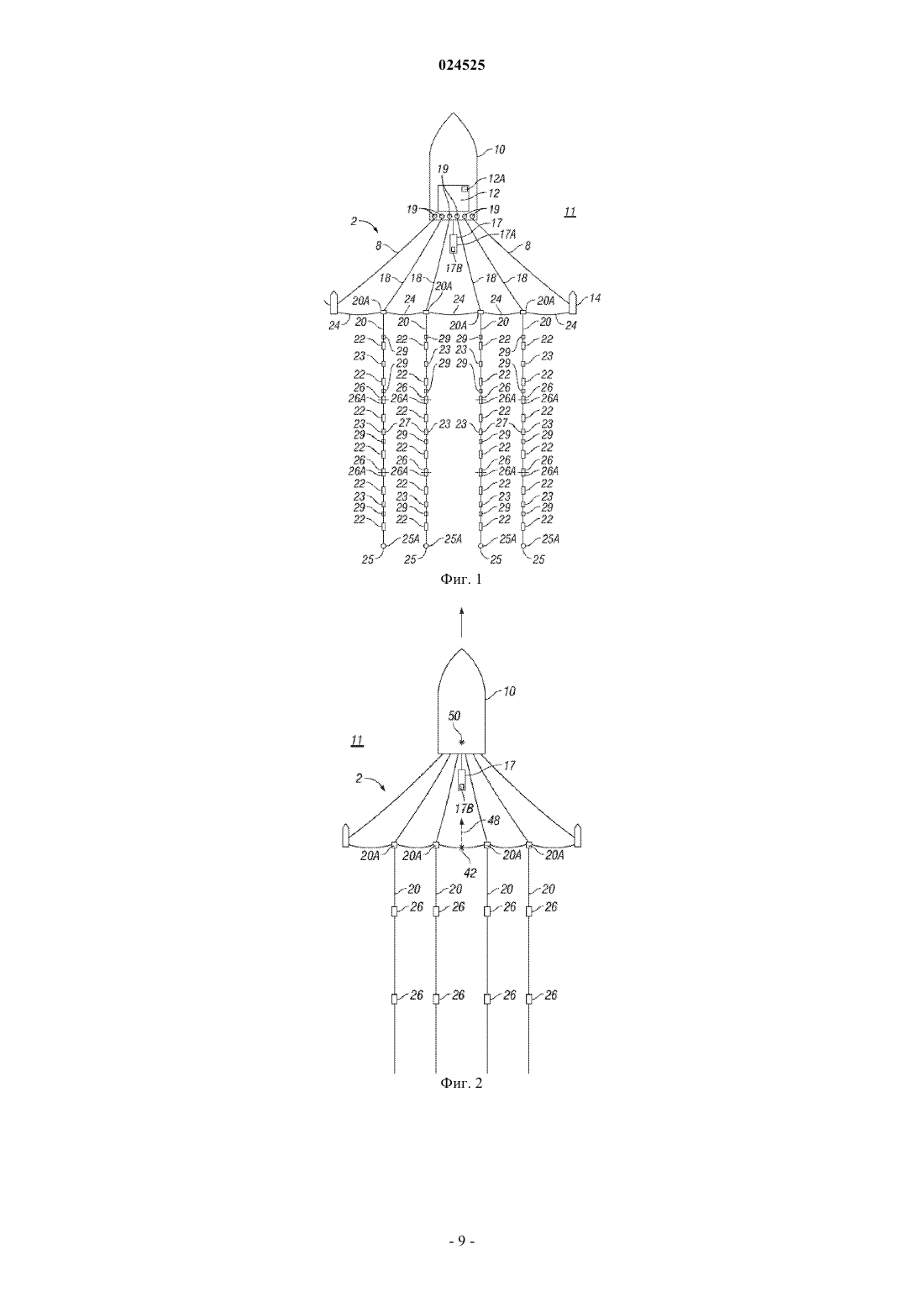
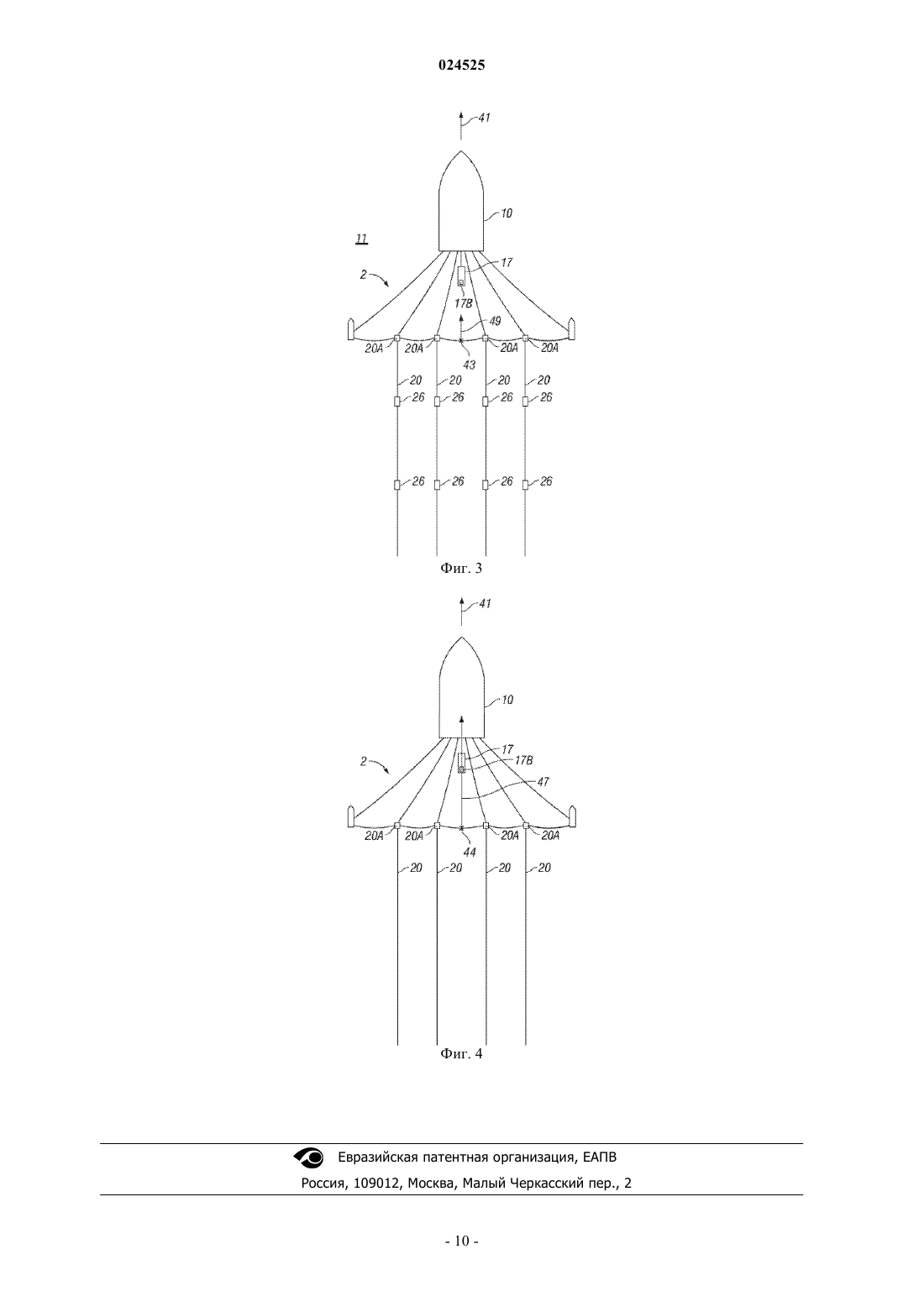
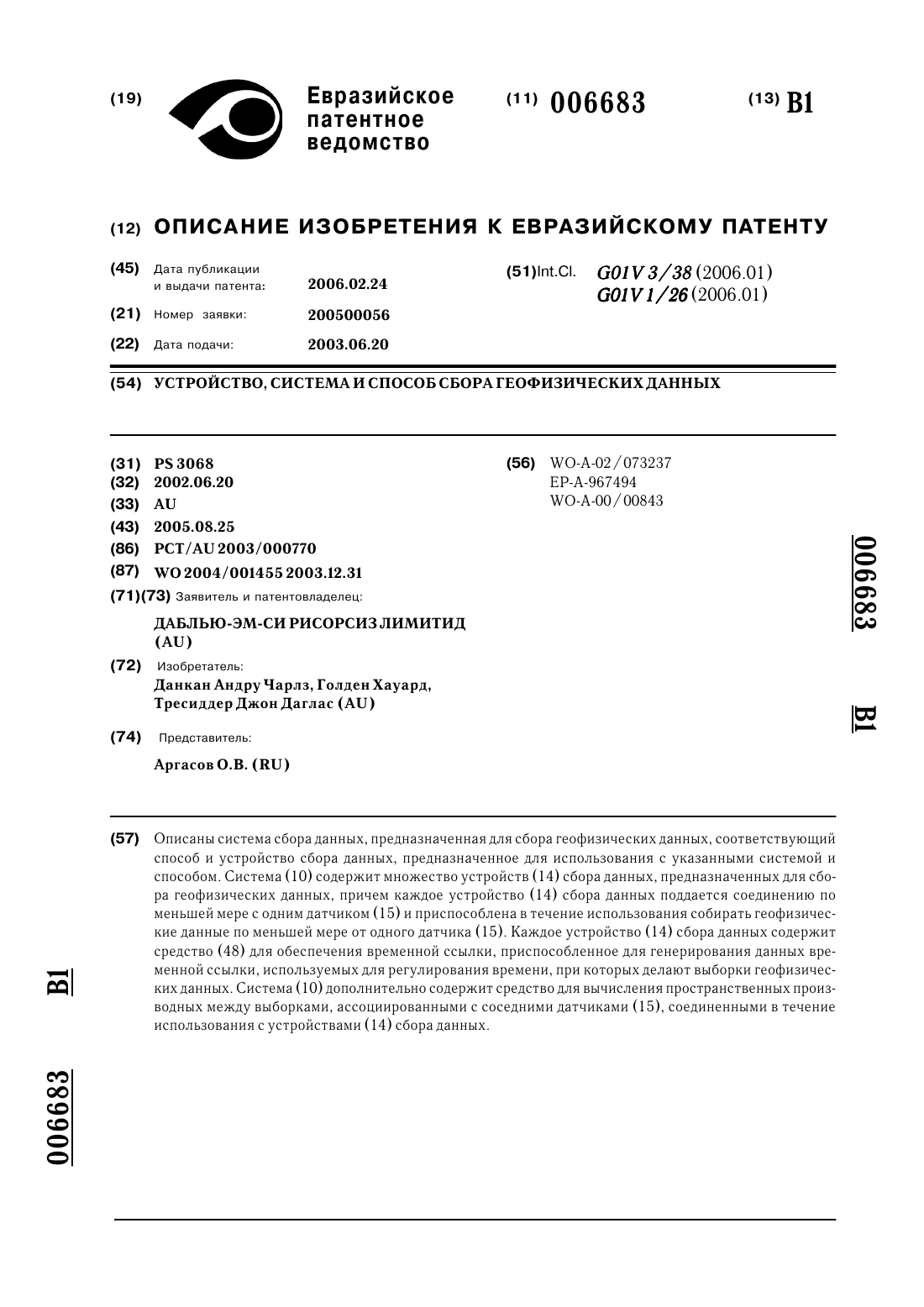
СПОСОБ СБОРА МОРСКИХ ГЕОФИЗИЧЕСКИХ ДАННЫХ (ВАРИАНТЫ) В первом варианте осуществления изобретение предлагает способ сбора геофизических данных, включающий буксирование оборудования для сбора геофизических данных позади сейсморазведочного судна в водоеме, причем указанное оборудование включает группу сейсмоприемных кос, тянущихся за указанным судном, и определения геодезического местоположения опорной точки управления косой, находящейся на переднем конце группы сейсмоприемных кос, и опорного направления. По меньшей мере одна сейсмоприемная коса,входящая в указанную группу сейсмоприемных кос, отклоняется в поперечном направлении под влиянием определенного геодезического местоположения указанной опорной точки управления сейсмической косой и указанного определенного опорного направления.(71)(73) Заявитель и патентовладелец: ПГС ГЕОФИЗИКАЛ АС (NO) Область техники, к которой относится изобретение Изобретение в целом относится к области морской геофизической разведки. Более конкретно, изобретение относится к способам управления пространственным распределением или оборудованием для сбора геофизических данных, буксируемым позади сейсморазведочного судна. Предшествующий уровень техники Системы морской геофизической разведки, такие как системы сбора сейсмических данных и системы электромагнитной съемки, используются для получения геофизических данных из формаций, расположенных ниже подошвы водного слоя, например, озера или океана. Как правило, морские сейсморазведочные системы, например, включают сейсморазведочное судно, на борту которого находятся навигационное оборудование, оборудование управления сейсмическими источниками и аппаратура записи геофизических данных. Сейсморазведочное судно, как правило, выполнено с возможностью буксирования в воде одной или, чаще всего, набора сейсмических кос, пространственно разнесенных в поперечном направлении. В выбранные моменты времени оборудование управления сейсмическими источниками вызывает активацию одного или нескольких сейсмических источников (которые могут буксироваться в воде сейсморазведочным судном или другим судном). Сигналы, генерируемые различными датчиками одной или нескольких сейсмических кос в ответ на зарегистрированную сейсмическую волну, подаются в конечном счете на записывающее оборудование. В записывающей системы выполняется запись сигналов, генерируемых каждым датчиком (или группами таких датчиков), в зависимости от времени. В дальнейшем записанные сигналы интерпретируются для вывода заключения о строении и составе формаций,расположенных ниже подошвы водного слоя. Соответствующие компоненты для возбуждения электромагнитных полей и регистрации электромагнитных явлений, возникающих в геологической среде в ответ на такие поля, направленные в эту среду, могут использоваться в системах для морской электромагнитной геофизической разведки. Одна или несколько сейсмоприемных кос представляют собой, в самом широком смысле, длинные кабели с геофизическими датчиками, расположенными в пространственно разнесенных местах по длине кабелей. Типовая сейсмическая коса может тянуться за геофизическим сейсморазведочным судном на несколько километров. Системы с несколькими сейсмическими косами применяются при геофизической разведке, известной под названием трехмерной и четырехмерной. Четырехмерная сейсморазведка представляет собой трехмерную съемку, повторяющуюся в выбранные моменты времени на одном и том же участке геологической среды. На качество геофизических изображений геологической среды, получаемых с помощью трех- или четырехмерной сейсморазведки, влияет точность, с которой осуществляется управление положением отдельных датчиков в сейсмических косах. Специалистам известны различные устройства для позиционирования сейсмических кос в поперечном направлении и (или) на выбранной глубине ниже водной поверхности. Например, в патенте США 5,443,027, выданном Owsley и др., описано устройство передачи бокового усилия для смещения буксируемого подводного акустического кабеля, которое обеспечивает смещение в горизонтальном и вертикальном направлениях. В патенте США 6,011,752, выданном Jambs и др., описан модуль управления положением сейсмической косы. В патенте США 6,144,342, выданном Bertheas и др., описан способ навигационного управления буксируемой сейсмической косой с помощью регуляторов глубины погружения, прикрепленных к внешней части сейсмической косы. Сущность изобретения В первом варианте осуществления изобретение предлагает способ сбора геофизических данных,включающий буксирование оборудования для сбора геофизических данных позади сейсморазведочного судна в водоеме, причем указанное оборудование включает группу сейсмоприемных кос, тянущихся за указанным судном, и определения геодезического местоположения опорной точки управления косой,находящейся на переднем конце группы сейсмоприемных кос, и опорного направления. По меньшей мере одна сейсмоприемная коса, входящая в указанную группу сейсмоприемных кос, отклоняется в поперечном направлении под влиянием определенного геодезического местоположения указанной опорной точки управления сейсмической косой и указанного определенного опорного направления. В другом варианте осуществления изобретение предлагает способ сбора геофизических данных,включающий буксирование оборудования для сбора геофизических данных позади сейсморазведочного судна в водоеме, причем указанное оборудование включает группу сейсмоприемных кос, содержащую набор сейсмоприемных кос, тянущихся за указанным судном, определения геодезического местоположения опорной точки управления судном, находящейся на переднем конце указанной группы сейсмоприемных кос, и управления сейсморазведочным судном, реализуемого таким образом, чтобы опорная точка управления судном следовала по предварительно выбранной траектории движения. Еще в одном варианте осуществления изобретение предлагает способ сбора геофизических данных,включающий буксирование оборудования для сбора геофизических данных позади сейсморазведочного судна в водоеме, причем указанное оборудование включает геофизический источник возбуждения и группу сейсмоприемных кос, содержащую набор сейсмоприемных кос, тянущихся за указанным судном,определения геодезического местоположения опорной точки управления источником, находящейся на переднем конце указанной группы сейсмоприемных кос, определения требуемого поперечного положения источника по отношению к опорной точке управления источником и управления указанным геофизическим источником, реализуемого таким образом, чтобы указанный геофизический источник придерживался требуемого поперечного положения. Прочие особенности и преимущества настоящего изобретения будут ясны из нижеследующего описания и прилагаемой формулы изобретения. Перечень чертежей На фиг. 1 показана группа сейсмоприемных кос, каждая из которых включает устройства передачи бокового усилия и управления глубиной для регулирования геометрических характеристик соответствующей косы. На фиг. 2 представлен вариант осуществления изобретения, предусматривающий режим отслеживания переднего конца косы. На фиг. 3 представлен вариант осуществления изобретения, предусматривающий управление судном для удержания переднего конца косы на заданной траектории. На фиг. 4 представлен вариант осуществления изобретения, предусматривающий режим отслеживания энергоисточника. Сведения, подтверждающие возможность осуществления изобретения На фиг. 1 показана типовая система морской геофизической съемки 2, которая может включать набор сейсмоприемных кос 20 для геофизических исследований. Каждая из сейсмоприемных кос может направляться в воде одним или несколькими устройствами управления боковым усилием и глубиной ("БУГ") 26, совместно соединенными с каждой из кос 20. Как более подробно объясняется ниже, устройства БУГ 26, которые могут обеспечить возможность управления глубиной, применяются по усмотрению разработчика системы. Для целей настоящего изобретения необходимо только, чтобы устройства, связанные с геофизическими сейсмоприемными косами, обеспечивали управление по направлению, чтобы выдерживать направление косы параллельным плоскости водной поверхности при движении косы в водоеме. Система геофизической съемки 2 включает сейсморазведочное судно 10, которое движется по поверхности водоема 11, например, озера или океана. Сейсморазведочное судно 10 может везти оборудование, обозначенное в целом позицией 12 и для удобства совместно называемое "записывающей системой". Записывающая система 12, как правило, включает устройства (ни одно из описанных ниже устройств не показано отдельно), такие как блок записи данных для выполнения записи сигналов, генерируемых различными датчиками системы сбора данных, в зависимости от времени. Записывающая система 12 также включает, как правило, навигационное оборудование для определения и записи в выбранные моменты времени геодезического положения судна 10, и, с помощью других устройств, которые объясняются ниже, геодезического положения каждого из набора геофизических датчиков 22, расположенных в пространственно разнесенных местах вдоль сейсмических кос 20, буксируемых сейсморазведочным судном 10. В одном из примеров устройство для определения геодезического положения может представлять собой приемник сигналов геодезического положения, такой как приемник глобальной навигационной спутниковой системы (GPS, global positioning satellite), схематически обозначенный позицией 12 А. Специалистам известны также другие устройства для определения геодезического положения. Упомянутые выше элементы записывающей системы 12 знакомы специалистам, и, за исключением приемника 12 А,регистрирующего геодезическое положение 12 А, не показаны отдельно на рисунках в настоящем документе для ясности иллюстрации. Геофизические датчики 22 могут представлять собой геофизические датчики любого типа, известного специалистам. Неограничивающими примерами таких датчиков являются сейсмические датчики,реагирующие на движение частиц, такие как геофоны или акселерометры, датчики, реагирующие на давление, сейсмические датчики, реагирующие на временной градиент давления, электроды, магнетометры,датчики температуры или комбинации перечисленных типов. Геофизические датчики 22 могут измерять,например, энергию сейсмических или электромагнитных волн, первично отраженных или преломленных различными структурами геологической среды, расположенными ниже подошвы водного слоя 11, в ответ на волну, направляемую в геологическую следу энергоисточником 17. В качестве энергоисточника 17 может использоваться, например, сейсмоисточник или группа таких источников. Неограничивающими примерами сейсмоисточников являются пневмопушки и гидропушки. Энергоисточником 17 может также быть источник электромагнитного поля, например, проволочная рамка или пара электродов (не показаны для ясности). Энергоисточник 17 может буксироваться в воде 11 сейсморазведочным судном 10, как показано на рисунке, или другим судном (не показано). Записывающая система 12 может также включать оборудование управления энергоисточником (не показано отдельно) для избирательного управления энергоисточником 17. В сейсморазведочной системе, показанной на фиг. 1, имеются четыре сейсмоприемных косы 20,буксируемых сейсморазведочным судном 10. Однако количество сейсмоприемных кос, показанных на фиг. 1, служит только для целей объяснения настоящего изобретения и не ограничивает количество кос,которое может использоваться в любой конкретной системе геофизической съемки согласно настоящему изобретению. В морских системах сбора геофизических данных, таких как показана на фиг. 1, которые включают набор сейсмических кос, пространственно разнесенных в поперечном направлении, сейсмические косы 20, как правило, присоединены к буксировочному оборудованию, рассчитанному на то, чтобы закрепить передний конец сейсмических кос 20 в выбранном поперечном положении по отношению к соседним сейсмическим косам и сейсморазведочному судну 10. Как показано на фиг. 1, буксировочное оборудование может включать два буксировочных каната 8 параванов, каждый из которых присоединен к судну 10 одним концом с помощью лебедки 19 или аналогичного устройства для намотки каната, которое позволяет изменять длину выпущенной части каждого буксировочного каната 8 паравана. Дальний конец каждого буксировочного каната 8 паравана функционально соединен с параваном 14. Каждому из параванов 14 придана форма, обеспечивающая поперечную составляющую движения к различным буксировочным компонентам, размещаемым в воде 11, когда параваны 14 движутся в воде 11. "Поперечный" в настоящем контексте означает расположенный поперечно направлению движения сейсморазведочного судна 10 в воде 11. Поперечная составляющая движения каждого паравана 14 направлена противоположно поперечной составляющей другого паравана 14. Объединенная поперечная составляющая движения обоих параванов 14 отдаляет параваны 14 друг от друга до тех пор, пока это не приведет к натяжению одного или нескольких распределительных канатов или тросов 24, функционально соединенных концами между параванами 14. Каждая из сейсмоприемных кос 20 может быть присоединена своим осевым концом, ближайшим к судну 10 ("передний конец"), к концевому устройству 20 А соответствующего буксировочного тросакабеля. Концевые устройства 20 А буксировочных тросов-кабелей могут быть присоединены или связаны с распределительными канатами или тросами 24, чтобы по существу зафиксировать поперечные положения сейсмических кос 20 по отношению друг к другу. Каждое из концевых устройств 20 А буксировочных тросов-кабелей может включать датчик сигналов относительного положения (не показан отдельно и более подробно объясняется ниже). Электрическое и (или) оптическое соединение между соответствующими компонентами в записывающей системе 12 и, в конечном счете, между геофизическими датчиками 22 (и/или другим схемами) в сейсмических косах 20 может быть выполнено с помощью буксировочных тросов-кабелей 18, каждый из которых оканчивается соответствующим концевым устройством 20 А. Одно из концевых устройств 20 А буксировочных тросов-кабелей расположено на переднем конце каждой сейсмической косы 20. Каждый из буксировочных тросов-кабелей 18 может разворачиваться с помощью соответствующей лебедки 19 или аналогичного устройства для намотки каната таким образом, чтобы можно было изменять длину выпущенной части каждого троса-кабеля 18. Тип буксировочного оборудования, присоединяемого к переднему концу каждой сейсмической косы, который показан на фиг. 1,предназначен только для того, чтобы проиллюстрировать тип оборудования, которое может буксировать в воде группу сейсмических кос, пространственно разнесенных в поперечном направлении. В других примерах системы сбора геофизических данных согласно настоящему изобретению могут использоваться другие буксировочные конструкции. Система сбора данных, показанная на фиг. 1, может также включать набор устройств управления боковым усилием и глубиной ("БУГ") 26, совместно соединенных с каждой из сейсмических кос 20 в выбранных положениях по длине каждой сейсмической косы 20. Каждое устройство управления БУГ 26 может включать одну или несколько поворотных поверхностей управления (не показанных отдельно),которые, при переходе к выбранной вращательной ориентации по отношению к направлению движения таких поверхностей в воде 11, создают гидродинамическую подъемную силу в выбранном направлении,подталкивающую сейсмическую косу 20 в любом выбранном верхнем или нижнем направлении в воде 11 или по поверхности воды в направлении, поперечном по отношению к направлению движения судна 10. Таким образом, такие устройства управления БУГ 26 могут использоваться для поддержания выбранного геометрического расположения сейсмических кос 20. Неограничивающий пример устройства управления БУГ, которые может использоваться в некоторых вариантах осуществления, описан в публикации заявки на патент США 2009/0003129, поданной Stokkeland и др., исходная патентная заявка на которую находится в совместном владении с настоящим изобретением. Однако конкретная конфигурация устройств управления БУГ 26 не ограничивает объем настоящего изобретения. Как объяснялось выше, для целей настоящего изобретения только для некоторых устройств, используемых в качестве устройств управления БУГ 26, необходимо обеспечить возможность приложения выбираемого бокового усилия к соответствующим сейсмическим косам 20. Может предусматриваться управление глубиной сейсмических кос 20 пассивным способом, например, если предусмотреть для сейсмических кос 20 выбранный общий объемный вес или отдельные устройства управления глубиной (не показаны). Таким образом, ссылка на управление "глубиной", обеспечиваемое устройствами управления БУГ, распространяется только на данный пример осуществления, например, с использованием устройства, представленного в публикации заявки на патент 129, поданной Stokkeland и др., которая упоминается выше. Любая ссылка на активное управление глубиной сейсмических кос 20 не ограничивает объем настоящего изобретения. Поэтому для целей определения объема настоящего изобретения устройства БУГ 26 должны выполнять только функцию устройств управления "боковым усилием", а объясняемое здесь включение управления глубиной в качестве части функции, выполняемой устройствами управления БУГ 26, предназначено для того, чтобы специалисты в данной области понимали, что использование примера устройств управления БУГ 26, раскрытое в настоящем документе, как и другие аналогичные примеры, входит в объем настоящего изобретения. В настоящем примере каждое устройство управления БУГ 26 может включать соответствующее устройство определения относительного положения. В одном из примеров устройство определения положения может представлять собой акустическое дальномерное устройство ("АДУ") 26 А. Такие АДУ,как правило, включают ультразвуковой приемопередатчик или передатчик и электронную схему, выполненные с возможностью инициировать излучение приемопередатчиком импульсов акустической энергии. Время пробега акустических волн между передатчиком и приемником, расположенным на расстоянии от него, например, по длине той же сейсмической косы и (или) на другой сейсмической косе, связано с расстоянием между передатчиком и приемником и скоростью распространения акустической волны в воде. Можно предположить, что скорость распространения акустической волны в воде по существу не изменяется при проведении сейсморазведочных работ, или может быть измерена каким-либо устройством, таким как испытательная ячейка для определения скорости в воде. Альтернативно или дополнительно, акустические дальномерные устройства ("АДУ") могут располагаться в выбранных положениях вдоль каждой из сейсмических кос, не являясь при этом связанными с устройствами управления БУГ 26. Такие дополнительные АДУ обозначены позицией 23 на фиг. 1. Каждое из АДУ 26 А, 23 может обмениваться сигналами с записывающей системой 12 таким образом, чтобы в любой момент времени расстояние между любыми двумя АДУ 26 А, 23 на любой из сейсмических кос 20 поддавалось определению. Одно или несколько АДУ могут помещаться в выбранных положениях в непосредственной близости от кормовой оконечности судна 10, чтобы относительные расстояния между выбранными положениями судна 10 и любым из АРД на сейсмических косах также можно было определить. Неограничивающий пример АДУ и системы, используемой с такими АДУ, описан в патенте США 7,376,045, выданномFalkenberg и др., переуступленном патентообладателю настоящего изобретения и включенном в настоящий документ посредством ссылки. Сейсмические косы 20 могут, дополнительно или альтернативно, включать набор датчиков курса 29, пространственно разнесенных по длине каждой сейсмической косы 20. Датчики курса 29 могут представлять собой геомагнитные датчики направления, например, магнитные компасные устройства, прикрепленные снаружи к сейсмической косе 20. Один из типов компасного устройства описан в патенте США 4,481,611, выданном Burrage и включенном в настоящий документ посредством ссылки. Датчики курса 29 формируют сигнал, указывающий курс (направление на северный магнитный полюс) сейсмической косы 20 в осевом положении датчика курса 29 вдоль соответствующей сейсмической косы. Измерения такого курса в пространственно разнесенных местах вдоль каждой сейсмической косы могут использоваться для интерполяции геометрических характеристик (пространственного распределения) каждой сейсмической косы. На дальнем конце каждой сейсмической косы 20 может располагаться хвостовой буй 25. Хвостовой буй 25 может включать, помимо прочих измерительных устройств, приемник геодезического положения 25 А, например, GPS-приемник, который может определять геодезическое положение каждого хвостового буя 25. Приемник геодезического положения 25 А в каждом хвостовом буе 25 может обмениваться сигналами с записывающей системой 12. Определяя расстояние между АДУ 26 А, 23, включающими одно или несколько АДУ на судне 10, и(или) интерполируя пространственное распределение сейсмических кос 20 по результатам измерений,осуществляемых с помощью датчика курса 29, можно выполнить оценку геометрических характеристик каждой сейсмической косы 20. Геометрические характеристики сейсмических кос 20 могут совместно называться геометрической конфигурацией группы. Для целей определения объема настоящего изобретения различные компоненты измерения положения, описанные выше, включая относящиеся к датчикам курса 29, АДУ 26 А, 23 и, в случае их использования, к дополнительным приемникам геодезического положения 25 А в хвостовых буях 25, могут использоваться по отдельности или в любой комбинации. Для целей настоящего изобретения необходимо только иметь возможность выполнить удовлетворительную оценку относительного положения каждой точки по длине каждой сейсмической косы 20 по отношению к результату измерения в одной или нескольких точках в системе съемки. Одна такая точка может находиться на сейсморазведочном судне 10, измеренная GPS-приемником геодезического положения 12 А и (или) GPS-приемниками геодезического положения 25 А в хвостовых буях 25. надлежащем выборе мест по длине каждой сейсмической косы, в которых расположены опиПри санные выше различные устройства для измерения относительного положения, можно определять геометрическую конфигурацию группы без необходимости измерять, оценивать или иным образом определять абсолютное геодезическое положение в большом количестве мест по длине каждой сейсмической косы, например, путем использования большого количества GPS-приемников. Для удобства определения изобретения АДУ 26 А, 23 и датчики курса 29 могут называться датчиками "определения относительного положения". Определяя относительные положения в каждой точке вдоль сейсмической косы по отноше-4 024525 нию к выбранной точке на сейсморазведочном судне, хвостовому бую 25 и (или) энергоисточнику 17(геодезическое положение которого измеряется с помощью установленного на нем соответствующего датчика), можно определить геодезическое положение каждой из таких точек сейсмической косы. Конкретный пример системы для определения относительного положения сейсмических кос с помощью акустических сигналов описан в патенте, выданном Falkenberg и др., упоминаемом выше. В настоящем примере энергоисточник 17 может включать устройство управления 17 В, обеспечивающее автономное управление траекторией источника 17. Устройство управления энергоисточника 17 В может контролироваться при помощи подходящих управляющих сигналов, поступающих из записывающей системы 12. В процессе работы системы сбора геофизических данных, показанной на фиг. 1, может понадобиться отрегулировать геометрическую конфигурацию группы сейсмических кос, чтобы обеспечить или сохранить выбранную геометрическую конфигурацию группы во время геофизической разведки. Записывающая система 12 может быть выполнена с возможностью передачи подходящих управляющих сигналов на каждое устройство БУГ 26, чтобы перемещать соответствующие части каждой сейсмической косы 20 в поперечном направлении. В ходе выполнения геофизических разведочных работ часто бывает необходимо развернуть сейсмические косы 20 позади судна 10 в выбранной геометрической конфигурации. В одном из вариантов осуществления настоящего изобретения может понадобиться равномерно развернуть сейсмические косы позади судна, чтобы не допустить образования "дыр" при охвате измерениями геологической среды. Однако могут быть заданы и другие варианты выбранных геометрических конфигураций. "Равномерно" в данном контексте означает, что поперечные расстояния между соседними сейсмическими косами 20 будут одинаковыми по всей длине сейсмических кос 20, или поперечные расстояния будут связаны, например, пропорциональной зависимостью, с продольным расстоянием от передних концов сейсмических кос. Отклонения от равномерного распределения могут возникать в результате, например, разрывных течений в воде 11 и струи от винта судна 10. 1. Режим отслеживания переднего конца сейсмической косы. Первый вариант осуществления настоящего изобретения может быть назван "режимом отслеживания переднего конца сейсмической косы". Согласно фиг. 2, оборудование для сбора геофизических данных 2, включая группу сейсмоприемных кос 20, буксируется позади сейсморазведочного судна 10 в водоеме 11. В этом варианте осуществления определяется геодезическое положение опорной точки 42 управления сейсмической косой на переднем конце сейсмоприемных кос 20 и опорное направление 48 указанной опорной точки 42 управления сейсмической косой. Далее, сейсмоприемные косы 20 управляются с помощью устройств БУГ 26 в ответ на сигналы, поступающие от записывающей системы (12 на фиг. 1) таким образом, чтобы сейсмоприемные косы 20 стремились поддерживать геометрическую конфигурацию, определенную по отношению к указанной опорной точке и опорному направлению. По меньшей мере одна сейсмоприемная коса, входящая в указанную группу сейсмических кос 20, отклоняется в поперечном направлении под влиянием указанного определенного геодезического местоположения указанной опорной точки 42 управления сейсмической косой и определенного опорного направления 48. Геодезическое положение переднего конца одной или нескольких сейсмоприемных кос 20 можно определить путем использования датчика относительного положения (не показан отдельно), расположенного в концевых устройствах 20 А переднего конца сейсмоприемных кос, и вычисления геодезического положения передних концов сейсмоприемных кос по измеренному относительному положению между концевым устройством 20 А переднего конца и результатами одного или нескольких измерений,выполненных датчиками геодезического положения (например, обозначенными позициями 12 А на фиг. 1, 17 А на фиг. 1 или 25 А на фиг. 1). Геодезические положения, вычисленные таким образом для концевого устройства 20 А переднего конца, можно использовать для определения опорной точки 42 управления сейсмической косой. Опорная точка 42 управления сейсмической косой может, например, находится в поперечном центре концевых устройств 20 А переднего конца. Опорная точка 42 может быть определена,например, путем вычисления среднего значения геодезических положений всех концевых устройств 20 А переднего конца. Опорная точка управления сейсмической косой может также определяться на основе только одного или ограниченного количества концевых устройств 20 А переднего конца сейсмической косы с возможным учетом бокового смещения. Например, опорная точка управления сейсмической косой может быть основана на двух концевых устройствах 20 А переднего конца сейсмоприемных кос. В дополнение к опорной точке управления сейсмической косой определяется также "опорное направление" 48. В одном из вариантов осуществления настоящего изобретения опорным направлением 48 может быть направление движения опорной точки 42 управления сейсмической косой при буксировании сейсмоприемных кос 20 позади сейсморазведочного судна 10. Для определения этого опорного направления геодезическое положение опорной точки 42 управления сейсмической косой может определяться многократно через выбранные временные интервалы (например, каждую секунду) с целью вычисления направления перемещения опорной точки 42 управления сейсмической косой. Опорные точки управления сейсмическими косами могут быть подвергнуты действию сглаживающего фильтра (например, в записывающей системе 12 на фиг. 1) для удаления любых кратковременных помех или вибраций. В другом варианте осуществления настоящего изобретения опорным направлением 48 может быть направление между геодезическим местоположением указанной опорной точкой 42 управления сейсмической косой и местоположением 50 на указанном сейсморазведочном судне 10 или другим местоположением на указанном геофизическом оборудовании 2. Также может использоваться вариант опорного направления 48, подвергнутого временной фильтрации, который получают путем определения направления между геодезическим местоположением указанной опорной точки 42 управления сейсмической косой и местоположением 50 на указанном геофизическом оборудовании 2. Могут быть и другие подходящие способы определения опорного направления. Опорное направление может также представлять собой заранее выбранное направление. Опорная точка 42 управления сейсмической косой и опорное направление 48 могут далее использоваться для определения требуемого расположения указанных сейсмоприемных кос 20. Для каждой сейсмоприемной косы 20 возможной требуемой траекторией движения является следование опорной точке и опорному направлению 48, но со смещением относительно опорной точки на выбранную величину смещения для каждой сейсмической косы или выбранных частей каждой сейсмической косы. В данном примере боковое смещение, перпендикулярное опорному направлению 48, можно определить для каждого устройства БУГ 26 на каждой сейсмической косе 20, при этом окончательное предпочтительное положение для каждого устройства БУГ может быть определено по опорной точке 42 плюс боковое смещение. Боковое смещение может вычисляться отдельно для каждого устройства БУГ,как правило, но не обязательно, в зависимости от расстояния каждого такого устройства от судна 10, а также соответствующего номинального бокового смещения сейсмической косы относительно диаметральной линии судна. Другими факторами, вызывающими смещение, могут быть боковые течения. В случае сильных боковых течений попытка полностью скорректировать перекос буксировочного устройства может оказаться нежелательной. Вместо этого можно добавить всем сейсмическим косам некоторое смещение в направлении течения, чтобы компенсировать этот перекос. Выбранная геометрическая конфигурация датчиков может быть прямой линией, идущей параллельно или под некоторым углом к опорному направлению 48, но она может и не быть прямой линией. В одном из вариантов осуществления настоящего изобретения опорная точка управления сейсмической косой представляет собой передний конец одной из указанных сейсмоприемных кос, входящих в указанную группу сейсмоприемных кос. В другом варианте осуществления настоящего изобретения определяется геодезическое местоположение опорной точки второй сейсмической косы, находящейся на переднем конце второй из сейсмоприемных кос, при этом указанная вторая сейсмическая коса отклоняется в поперечном направлении под влиянием определенного геодезического местоположения второй опорной точки управления косой. Необходимое положение для каждого устройства БУГ 26 можно определить в соответствии с методами, объяснявшимися выше, при это работа устройств БУГ 26 может осуществляться таким образом,чтобы сейсмические косы 20 по существу перемещались, придерживаясь такого требуемого положения. 2. Управление судном с целью удержания передних концов сейсмических кос на определенной траектории. Другой вариант осуществления настоящего изобретения может называться "управлением судном с целью удержания передних концов сейсмических кос на определенной траектории" 49. Согласно фиг. 3,оборудование для сбора геофизических данных 2, включая группу сейсмоприемных кос 20, буксируется позади сейсморазведочного судна 10 в водоеме 11. В этом варианте осуществления изобретения курс судна 41 можно корректировать, чтобы заставить опорную точку 43 управления судном, находящуюся на переднем конце указанной группы сейсмоприемных кос 20, следовать по определенной геодезической траектории 49, например, по траектории, пересекавшейся передним концом группы сейсмоприемных датчиков при ранее проводившейся геофизической разведке. Геодезическое местоположение опорной точки 43 управления судном на переднем конце группы сейсмоприемных датчиков 20 поддается определению. В одном из вариантом осуществления настоящего изобретения опорная точка 43 управления судном может быть той же самой, что опорная точка 42 управления сейсмической косой. Управление сейсморазведочным судно 10 осуществляется таким образом, чтобы опорная точка 43 управления судном следовала по предварительно выбранной траектории 49. При управлении судном, как правило, учитываются результаты измерения ветра и водных течений с целью повышения точности управления судном для обеспечения необходимого управления передним концом сейсмической косы. Управление группой геофизических датчиков, как объяснялось выше, может дать определенные преимущества. Выбирая курс судна 41 таким образом, чтобы опорная точка 43 следовала по выбранной траектории, можно существенно уменьшить величину отклоняющей силы, требующейся в непосредственной близости от переднего конца каждой сейсмической косы и обеспечиваемой устройствами БУГ 26 для поддержания выбранной геометрической конфигурации сейсмоприемных кос 20. 3. Режим отслеживания энергоисточника. Другой вариант осуществления настоящего изобретения может называться "режимом отслеживания энергоисточника". Согласно фиг. 4, оборудование для сбора геофизических данных 2, включая группу сейсмоприемных кос 20, буксируется позади сейсморазведочного судна 10 в водоеме 11. В этом варианте осуществления изобретения устройство управления 17 В энергоисточником работает таким образом, чтобы заставить энергоисточник 17 двигаться по направлению к поперечному положению, которое может находиться на линии 47, проведенной вперед относительно переднего конца указанной группы сейсмоприемных кос 20. В одном из вариантов осуществления изобретения опорная точка 44 управления источником является той же самой, что и опорная точка 42 управления сейсмической косой. Требуемое поперечное положение источника можно определить, продолжая линию 47 вперед относительно опорной точки 44 управления источником. Линия 47 может быть определена таким же способом, как опорное направление 48, как было описано выше при обсуждении режима отслеживания переднего конца сейсмической косы, путем определения направления движения опорной точки 44 управления источником или направления от опорной точки 44 управления источником к местоположению указанного сейсморазведочного судна 10 или к другому местоположению на указанном геофизическом оборудовании 2. Линию 47 можно также определить по предварительно выбранному опорному направлению. В одном из вариантов осуществления изобретения линия 47 является той же самой, что опорная точка и опорное направление, определенные применительно к режиму отслеживания переднего конца сейсмической косы, описанному со ссылкой на фиг. 2. Как правило, сейсмический источник включает группу отдельных элементовисточников или отдельные подгруппы, при этом управление центральным положением источника осуществляется таким образом, чтобы поддерживать его в заданном поперечном положении, определенном линией 47. Требуемое центральное положение источника можно использовать для определения требуемого положения смещения для каждого отдельного элемента-источника или подгруппы относительно проведенной линии 47 источника. Способы применения устройств управления БУГ и контроля геометрической конфигурации группы датчиков согласно различным аспектам настоящего изобретения позволяют обеспечить более равномерное покрытие при морской геофизической разведке, более точное позиционирование геофизических датчиков, а также повысить безопасность группы в неблагоприятных условиях окружающей среды. Любой из описанных выше способов (Режим отслеживания переднего конца сейсмической косы, Управление судном с целью удержания передних концов сейсмических кос на заданной траектории и Режим отслеживания энергоисточника) могут использоваться по отдельности или в любой комбинации из двух или трех этих режимов. Хотя настоящее изобретение описано с использованием ограниченного числа вариантов осуществления, специалисты, воспользовавшись раскрытым здесь изобретением, смогут вывести из настоящего описания другие варианты осуществления, не отступающие от объема раскрытого здесь изобретения. Соответственно, объем настоящего изобретения ограничивается только прилагаемой формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ сбора геофизических данных, включающий следующие шаги: буксируют оборудование для сбора геофизических данных позади сейсморазведочного судна в водоеме, причем указанное оборудование включает по меньшей мере один геофизический источник и группу сейсмоприемных кос, тянущихся за указанным судном; определяют геодезическое местоположение первой опорной точки управления, находящейся на переднем конце группы сейсмоприемных кос, причем эту первую опорную точку управления определяют как среднее значение положений соответствующих концевых устройств переднего конца сейсмоприемных кос; определяют опорное направление, являющееся направлением от указанной первой опорной точки управления к выбранному местоположению на сейсморазведочном судне; и отклоняют в поперечном направлении, посредством устройства передачи бокового усилия, как по меньшей мере одну сейсмоприемную косу, входящую в группу сейсмоприемных кос, так и указанный по меньшей мере один геофизический источник, причем это отклонение в поперечном направлении основано на определенном геодезическом местоположении указанной первой опорной точки управления и указанном определенном опорном направлении. 2. Способ по п.1, отличающийся тем, что включает определение требуемого поперечного положения источника по отношению к первой опорной точке управления и управление геофизическим источником таким образом, чтобы геофизический источник придерживался требуемого поперечного положения. 3. Способ по п.1, отличающийся тем, что включает управление сейсморазведочным судном таким образом, чтобы указанная первая опорная точка управления следовала по предварительно выбранной траектории движения. 4. Способ по любому из предыдущих пунктов, отличающийся тем, что в нем определяют геодезическое местоположение второй опорной точки управления, представляющей собой передний конец другой из указанных сейсмоприемных кос, входящей в группу сейсмоприемных кос, и отклоняют в поперечном направлении указанную другую сейсмическую косу под влиянием определенного геодезического местоположения второй опорной точки управления и определенного опорного направления. 5. Способ по любому из предыдущих пунктов, отличающийся тем, что определение указанного опорного направления включает последовательное определение геодезического положения первой опорной точки управления и определение указанного опорного направления по результатам последовательного определения геодезического положения указанной первой опорной точки управления. 6. Способ по п.5, отличающийся тем, что он включает временную фильтрацию указанного определенного опорного направления. 7. Способ по любому из пп.1-4, отличающийся тем, что отклонение в поперечном направлении указанной по меньшей мере одной сейсмоприемной косы осуществляют в направлении опорной линии, проходящей через указанную первую опорную точку управления вдоль указанного опорного направления. 8. Способ сбора геофизических данных, включающий следующие шаги: буксируют оборудование для сбора геофизических данных позади сейсморазведочного судна в водоеме, причем указанное оборудование включает по меньшей мере один геофизический источник и группу сейсмоприемных кос, тянущихся за указанным судном; определяют геодезическое местоположение опорной точки управления, находящейся на переднем конце группы сейсмоприемных кос, причем эту опорную точку управления определяют как среднее значение положений соответствующих концевых устройств переднего конца сейсмоприемных кос; управляют сейсморазведочным судном таким образом, чтобы опорная точка управления следовала по предварительно выбранной траектории движения; и управляют указанным геофизическим источником на основании указанной опорной точки управления. 9. Способ по п.8, отличающийся тем, что управление указанным геофизическим источником включает определение требуемого поперечного положения источника по отношению к опорной точке управления и управление геофизическим источником таким образом, чтобы геофизический источник придерживался требуемого поперечного положения. 10. Способ сбора геофизических данных, включающий следующие шаги: буксируют оборудование для сбора геофизических данных позади сейсморазведочного судна в водоеме, причем указанное оборудование включает геофизический источник и группу сейсмоприемных кос, тянущихся за указанным судном; определяют геодезическое местоположение опорной точки управления, находящейся на переднем конце группы сейсмоприемных кос, причем эту опорную точку управления определяют как среднее значение положений соответствующих концевых устройств переднего конца сейсмоприемных кос; определяют требуемое поперечное положение источника по отношению к опорной точке управления; управляют геофизическим источником таким образом, чтобы геофизический источник придерживался требуемого поперечного положения; определяют опорное направление, являющееся направлением от указанной опорной точки управления к выбранному местоположению на сейсморазведочном судне; и отклоняют в поперечном направлении посредством устройства передачи бокового усилия по меньшей мере одну сейсмоприемную косу на основе указанной опорной точки управления и указанного опорного направления.
МПК / Метки
МПК: G01V 1/38
Метки: способ, данных, морских, сбора, геофизических, варианты
Код ссылки
<a href="https://eas.patents.su/11-24525-sposob-sbora-morskih-geofizicheskih-dannyh-varianty.html" rel="bookmark" title="База патентов Евразийского Союза">Способ сбора морских геофизических данных (варианты)</a>
Устройство, система и способ сбора геофизических данных
Номер патента: 6683
Опубликовано: 24.02.2006
Авторы: Тресиддер Джон Даглас, Голден Хауард, Данкан Андру Чарлз
Метки: сбора, геофизических, способ, данных, система, устройство
Формула / Реферат:
1. Система сбора данных, предназначенная для сбора геофизических данных, содержащая по меньшей мере одно устройство сбора данных, выполненное с возможностью соединения со множеством датчиков для одновременного сбора геофизических данных от датчиков, причем одно или каждое устройство сбора данных содержит средство для обеспечения временной ссылки, приспособленное для генерирования данных временной ссылки, пригодное для регулирования времени, при...
Способ получения и обработки морских сейсмических данных
Номер патента: 21420
Опубликовано: 30.06.2015
Авторы: Паркес Грегори Эрнст, Хегна Стиан
МПК: G01V 1/38
Метки: морских, способ, получения, обработки, данных, сейсмических
Формула / Реферат:
1. Способ получения и обработки морских сейсмических сигналов для выделения полей восходящих и нисходящих волн, излучаемых сейсмоисточником, включающий следующие шаги:размещают по меньшей мере два морских сейсмоисточника на различных глубинах в водоеме, по существу, в одинаковом продольном положении по отношению к сейсморазведочному судну;активируют каждый из сейсмоисточников в ряде последовательностей выстрелов, при этом каждая...
Система сбора, регистрации данных и выдачи записанных в зу средств, устройство сбора и регистрации данных для нее и способ эксплуатации системы
Номер патента: 2002
Опубликовано: 22.10.2001
Автор: Костерке Райнхард
МПК: G07F 17/42, G07C 9/00
Метки: устройство, нее, сбора, средств, данных, записанных, выдачи, регистрации, эксплуатации, системы, способ, система
Формула / Реферат:
1. Система сбора, регистрации данных и выдачи записанных в ЗУ средств, содержащая а) устройство (1) сбора и регистрации служебной и персонифицированной информации, которое имеет - устройство считывания (8, 10), по меньшей мере, с одним блоком считывания первых записанных в ЗУ персонифицированных и мобильных средств, - устройство (4) ручного ввода данных, - устройство (2) управления вводом определенных персонифицированных данных в режиме...
Эффективный способ инверсии геофизических данных
Номер патента: 17177
Опубликовано: 30.10.2012
Авторы: Кребс Джером Р., Хинкли Дэвид Л.
МПК: G01V 3/18
Метки: данных, способ, эффективный, инверсии, геофизических
Формула / Реферат:
1. Осуществляемый на компьютере способ инверсии измеренных геофизических данных для определения модели физических свойств для области недр, содержащий:(a) получение группы из двух или более кодированных выборок измеренных геофизических данных, причем каждая выборка ассоциирована с одним обобщенным источником или с одним приемником, и причем каждая выборка кодирована разными кодирующими функциями, выбираемыми из набора неэквивалентных кодирующих...
Морская сейсмическая система сбора данных и способ для ее реализации

Номер патента: 2612
Опубликовано: 27.06.2002
Авторы: Биттлстон Саймон Хастингс, Озбек Али, Лунде Нильс, Мартин Джеймс
МПК: G01V 1/20
Метки: морская, способ, сбора, данных, сейсмическая, система, реализации
Формула / Реферат:
1. Сейсмическая система сбора данных, содержащая сейсмоприемную косу для приема сигналов, отраженных от слоев под водой, имеющая множество гидрофонов, распределенных по всей длине при средних интервалах разнесения не более чем 500 см, средство аналого-цифрового преобразования, принимающее и преобразующее в цифровую форму аналоговые сигналы гидрофонов, формирующее для каждого гидрофона отдельный цифровой сигнал, и фильтр, принимающий в качестве...
Предыдущий патент: Гены, белки и векторы для повышения устойчивости растений и микроорганизмов к абиотическим стрессам и их применение
Следующий патент: Изгибающее устройство
Случайный патент: Имидазопиридины в качестве противовирусных средств против респираторно-синцитиального вируса