Дмо-преобразование для восстановления информации при трехмерном прогнозировании поверхностных кратных волн
Номер патента: 24039
Опубликовано: 31.08.2016
Авторы: Ван Борселен Роальд Дж., Барнес Саймон Р., Аарон Питер А., Хеге Робертус Ф.





Формула / Реферат
1. Способ морской сейсморазведки, включающий восстановление морских сейсмических данных для трехмерного прогнозирования поверхностно-связанных кратных волн, содержащий следующие шаги:
определение ближайшей трассы в наборе сейсмических данных для требуемой восстанавливаемой трассы;
рассчитывание поправки за угол наклона по трассе и по выборке данных для разностей азимута, координат общей глубинной точки и удаления между ближайшей трассой и требуемой трассой;
применение поправки за угол наклона к ближайшей трассе для восстановления требуемой трассы с целью трехмерного прогнозирования поверхностно-связанных кратных волн.
2. Способ по п.1, отличающийся тем, что определение ближайшей трассы включает следующие шаги:
получение сейсмических данных в формате (xCMP, yCMP, h, φ, t);
определение преобладающего угла наклона по направлениям х и у для координат общей глубинной точки xCMP и yCMP и время вступления t на каждой трассе в сейсмических данных;
применение фильтра к углам наклона для сглаживания границ раздела;
выбор набора требуемых трасс для восстановления;
определение ближайшей трассы по сейсмическим данным для каждой требуемой трассы в выбранном наборе трасс.
3. Способ по п.2, отличающийся тем, что применяемый фильтр представляет собой медианный фильтр.
4. Способ по п.2, отличающийся тем, что определение ближайшей трассы включает минимизацию разности φ, которая представляет собой взвешенную сумму разностей координат х и у общей глубинной точки xCMP и yCMP, удаления h и азимута φ между ближайшей и требуемой трассами.
5. Способ по п.4, отличающийся тем, что минимизация разности φ включает применение следующего уравнения:

где α, β и e представляют собой определяемые пользователем веса; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно.
6. Способ по п.4, отличающийся тем, что минимизация разности φ включает применение следующего уравнения:

где α и β представляют собой определяемые пользователем веса; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно.
7. Способ по п.1, отличающийся тем, что расчет поправки за угол наклона содержит расчет поправки за угол наклона для ближайшей трассы и соответствующей требуемой трассы исходя из половинного удаления, азимута, времени вступления, медленности, координат общей глубинной точки, угла наклона и направления угла наклона.
8. Способ по п.7, отличающийся тем, что расчет поправки за угол наклона для разностей азимутов включает применение следующего уравнения:

с

и

где h' - половинное удаление; t - время вступления; p - медленность; θ - направление угла наклона; φ - азимут линии источник-приемник; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно.
9. Способ по п.7, отличающийся тем, что расчет поправки за угол наклона для разностей удалений включает применение следующего уравнения:

где h' - половинное удаление; Δh'=h'b-h'd - разность половинных удалений; t - время вступления; р – медленность; θ - направление угла наклона; φ - азимут линии источник-приемник; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно.
10. Способ по п.7, отличающийся тем, что расчет поправки за угол наклона для разностей положений общей глубинной точки включает применение следующего уравнения:

где р - медленность; θ - направление угла наклона; ΔxCMP=xbCMP-xdCMP - разность координат х между положениями общей глубинной точки; ΔyCMP=ybCMP-ydCMP - разность координат у между положениями общей глубинной точки; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно.
11. Способ по п.1, отличающийся тем, что расчет поправки за угол наклона содержит расчет поправки за угол наклона для ближайшей трассы и соответствующей требуемой трассы исходя из половинного удаления, азимута, времени вступления, скорости, координат общей глубинной точки, угла наклона и направления угла наклона.
12. Способ по п.11, отличающийся тем, что расчет поправки за угол наклона для разностей азимутов включает применение следующего уравнения:

где h' - половинное удаление; n - скорость среды; t - время вступления; y - угол наклона; φ - азимут линии источник-приемник; θ - направление угла наклона; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно.
13. Способ по п.11, отличающийся тем, что расчет поправки за угол наклона для разностей удалений включает применение следующего уравнения:

где n - скорость среды; t - время вступления; h' - половинное удаление; Δh'=h'b-h'd - разность половинных удалений; y - угол наклона; φ - азимут линии источник-приемник; θ- направление угла наклона; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно.
14. Способ по п.11, отличающийся тем, что расчет поправки за угол наклона для разностей общих глубинных точек включает применение следующего уравнения:

где n - скорость; y - угол наклона; ΔxCMP=xbCMP-xdCMP - разность координат х между положениями общей глубинной точки; ΔyCMP=ybCMP-ydCMP - разность координат у между положениями общей глубинной точки, θ - направление угла наклона; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно.
15. Способ по п.11, отличающийся тем, что расчет поправки за угол наклона для разностей общих глубинных точек включает применение следующего уравнения:

где y - угол наклона; n - скорость; t - время вступления; h' - половинное вступление; φ - азимут линии источник-приемник; ΔxCMP=xbCMP-xdCMP - разность координат х между положениями общей глубинной точки; ΔyCMP=ybCMP-ydCMP - разность координат y между положениями общей глубинной точки; θ - направление угла наклона; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно.
Текст
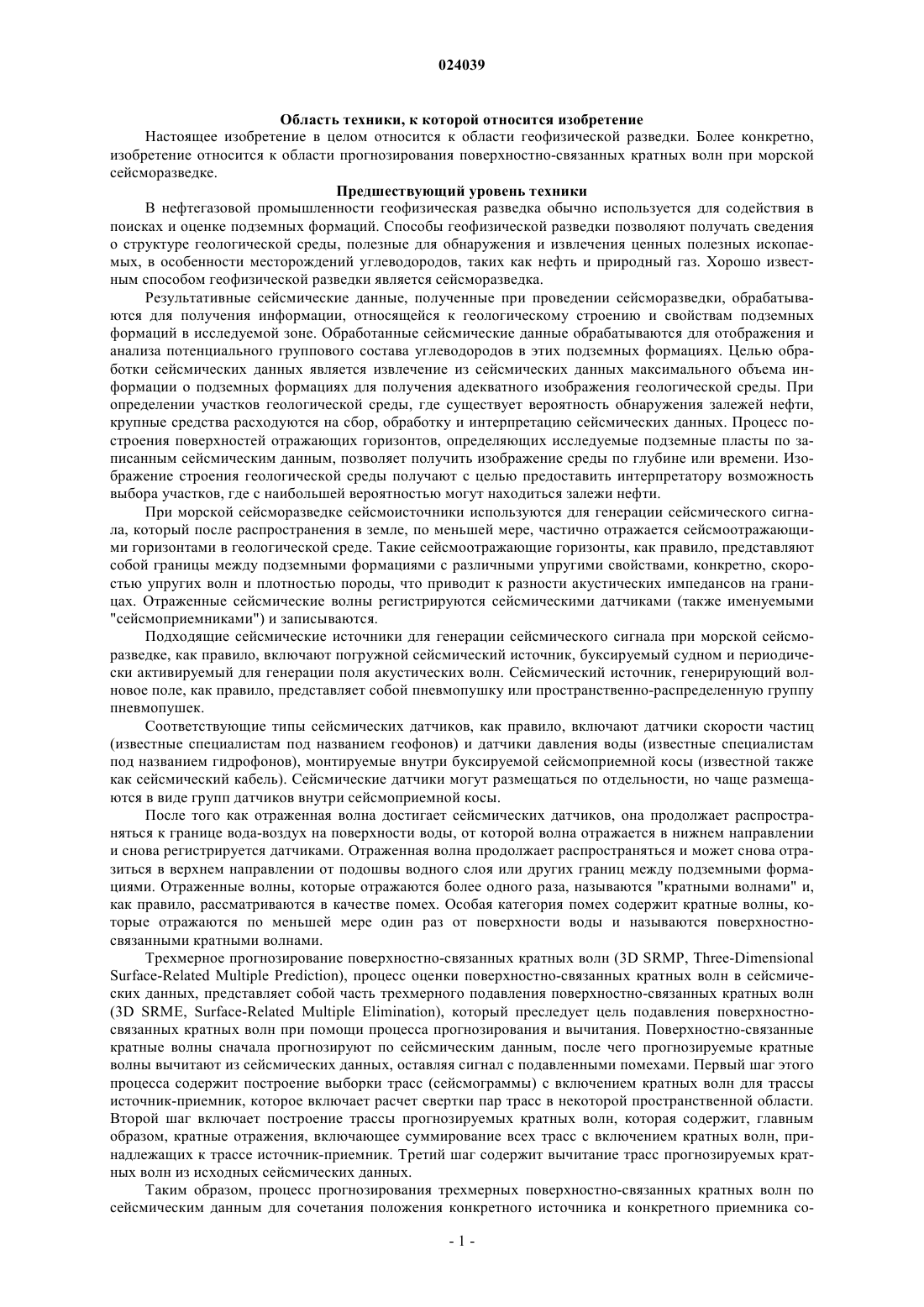
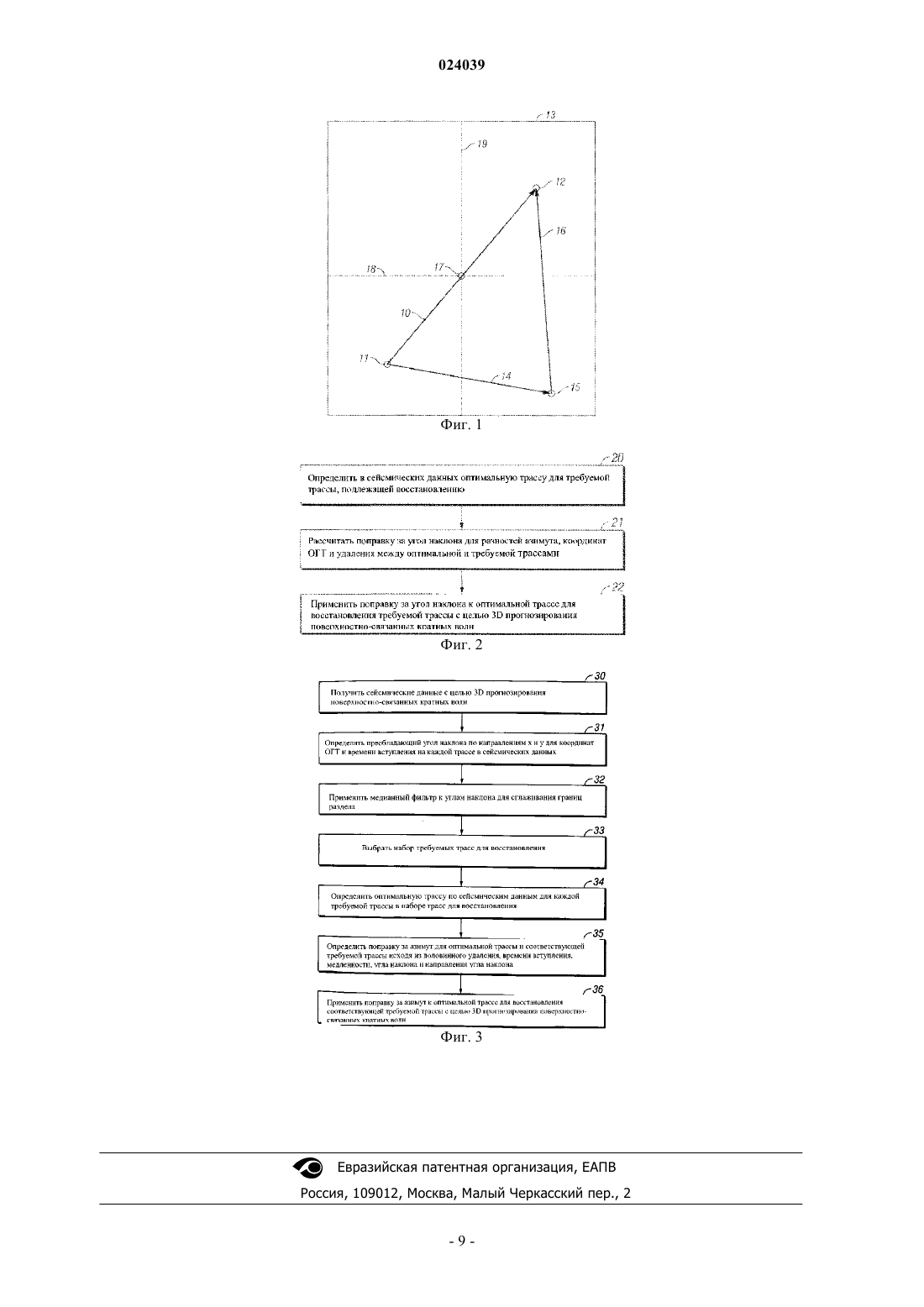
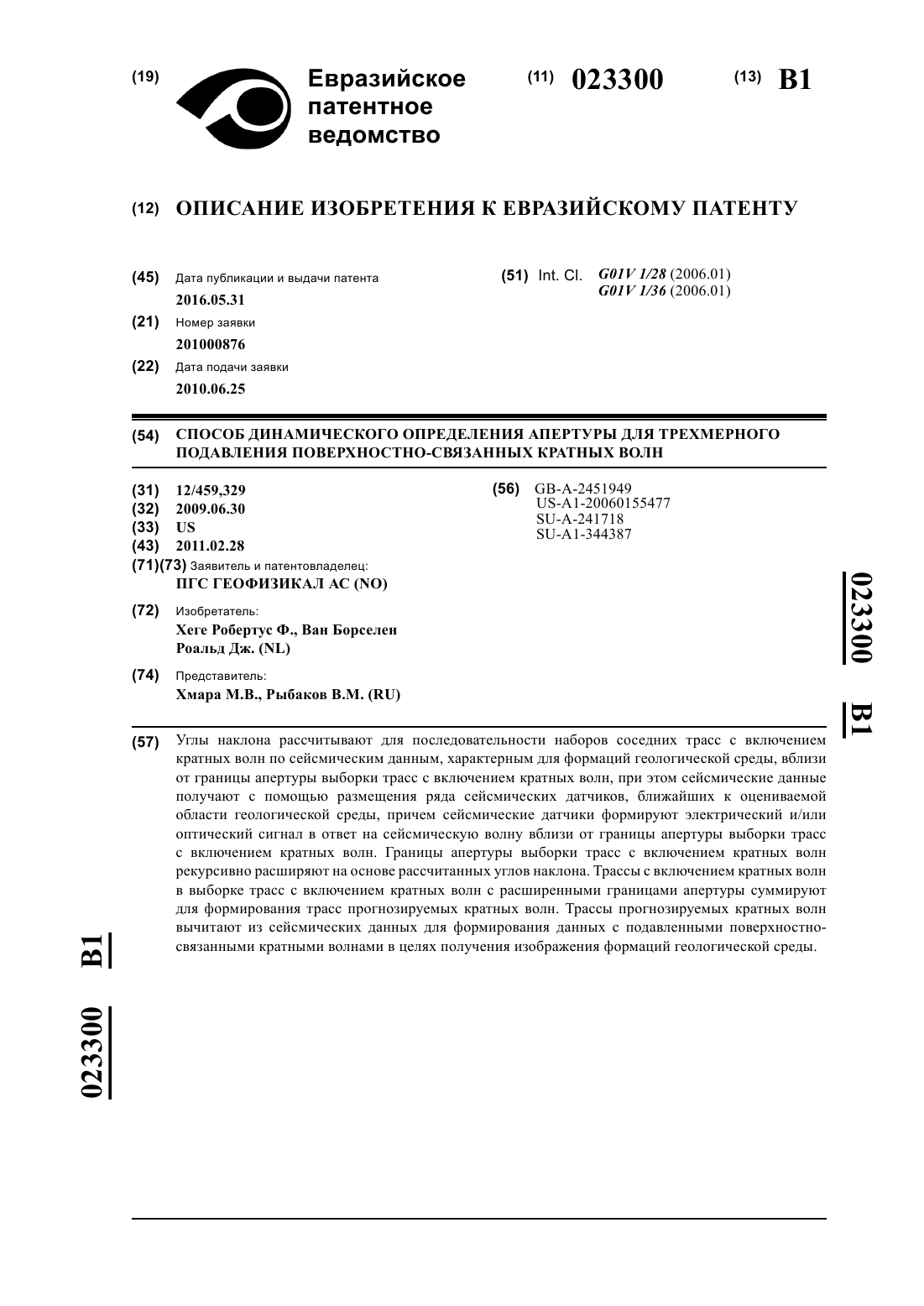
ДМО-ПРЕОБРАЗОВАНИЕ ДЛЯ ВОССТАНОВЛЕНИЯ ИНФОРМАЦИИ ПРИ ТРЕХМЕРНОМ ПРОГНОЗИРОВАНИИ ПОВЕРХНОСТНЫХ КРАТНЫХ ВОЛН В изобретении для требуемой восстанавливаемой трассы определяется оптимальная трасса в наборе сейсмических данных. Поправку за угол наклона (ДМО-преобразование) рассчитывают по трассе и по выборке для разностей азимута, координат общей глубинной точки (ОГТ) и удаления между оптимальной трассой и требуемой трассой. Поправку за угол наклона применяют к оптимальной трассе для восстановления требуемой трассы с целью трехмерного прогнозирования поверхностно-связанных кратных волн. Аарон Питер А. (US), Ван Борселен Роальд Дж., Хеге Робертус Ф. (NL),Барнес Саймон Р. (GB) Хмара М.В., Рыбаков В.М. (RU)(71)(73) Заявитель и патентовладелец: ПГС ГЕОФИЗИКАЛ АС (NO) Область техники, к которой относится изобретение Настоящее изобретение в целом относится к области геофизической разведки. Более конкретно,изобретение относится к области прогнозирования поверхностно-связанных кратных волн при морской сейсморазведке. Предшествующий уровень техники В нефтегазовой промышленности геофизическая разведка обычно используется для содействия в поисках и оценке подземных формаций. Способы геофизической разведки позволяют получать сведения о структуре геологической среды, полезные для обнаружения и извлечения ценных полезных ископаемых, в особенности месторождений углеводородов, таких как нефть и природный газ. Хорошо известным способом геофизической разведки является сейсморазведка. Результативные сейсмические данные, полученные при проведении сейсморазведки, обрабатываются для получения информации, относящейся к геологическому строению и свойствам подземных формаций в исследуемой зоне. Обработанные сейсмические данные обрабатываются для отображения и анализа потенциального группового состава углеводородов в этих подземных формациях. Целью обработки сейсмических данных является извлечение из сейсмических данных максимального объема информации о подземных формациях для получения адекватного изображения геологической среды. При определении участков геологической среды, где существует вероятность обнаружения залежей нефти,крупные средства расходуются на сбор, обработку и интерпретацию сейсмических данных. Процесс построения поверхностей отражающих горизонтов, определяющих исследуемые подземные пласты по записанным сейсмическим данным, позволяет получить изображение среды по глубине или времени. Изображение строения геологической среды получают с целью предоставить интерпретатору возможность выбора участков, где с наибольшей вероятностью могут находиться залежи нефти. При морской сейсморазведке сейсмоисточники используются для генерации сейсмического сигнала, который после распространения в земле, по меньшей мере, частично отражается сейсмоотражающими горизонтами в геологической среде. Такие сейсмоотражающие горизонты, как правило, представляют собой границы между подземными формациями с различными упругими свойствами, конкретно, скоростью упругих волн и плотностью породы, что приводит к разности акустических импедансов на границах. Отраженные сейсмические волны регистрируются сейсмическими датчиками (также именуемыми"сейсмоприемниками") и записываются. Подходящие сейсмические источники для генерации сейсмического сигнала при морской сейсморазведке, как правило, включают погружной сейсмический источник, буксируемый судном и периодически активируемый для генерации поля акустических волн. Сейсмический источник, генерирующий волновое поле, как правило, представляет собой пневмопушку или пространственно-распределенную группу пневмопушек. Соответствующие типы сейсмических датчиков, как правило, включают датчики скорости частиц(известные специалистам под названием геофонов) и датчики давления воды (известные специалистам под названием гидрофонов), монтируемые внутри буксируемой сейсмоприемной косы (известной также как сейсмический кабель). Сейсмические датчики могут размещаться по отдельности, но чаще размещаются в виде групп датчиков внутри сейсмоприемной косы. После того как отраженная волна достигает сейсмических датчиков, она продолжает распространяться к границе вода-воздух на поверхности воды, от которой волна отражается в нижнем направлении и снова регистрируется датчиками. Отраженная волна продолжает распространяться и может снова отразиться в верхнем направлении от подошвы водного слоя или других границ между подземными формациями. Отраженные волны, которые отражаются более одного раза, называются "кратными волнами" и,как правило, рассматриваются в качестве помех. Особая категория помех содержит кратные волны, которые отражаются по меньшей мере один раз от поверхности воды и называются поверхностносвязанными кратными волнами. Трехмерное прогнозирование поверхностно-связанных кратных волн (3D SRMP, Three-DimensionalSurface-Related Multiple Prediction), процесс оценки поверхностно-связанных кратных волн в сейсмических данных, представляет собой часть трехмерного подавления поверхностно-связанных кратных волн(3D SRME, Surface-Related Multiple Elimination), который преследует цель подавления поверхностносвязанных кратных волн при помощи процесса прогнозирования и вычитания. Поверхностно-связанные кратные волны сначала прогнозируют по сейсмическим данным, после чего прогнозируемые кратные волны вычитают из сейсмических данных, оставляя сигнал с подавленными помехами. Первый шаг этого процесса содержит построение выборки трасс (сейсмограммы) с включением кратных волн для трассы источник-приемник, которое включает расчет свертки пар трасс в некоторой пространственной области. Второй шаг включает построение трассы прогнозируемых кратных волн, которая содержит, главным образом, кратные отражения, включающее суммирование всех трасс с включением кратных волн, принадлежащих к трассе источник-приемник. Третий шаг содержит вычитание трасс прогнозируемых кратных волн из исходных сейсмических данных. Таким образом, процесс прогнозирования трехмерных поверхностно-связанных кратных волн по сейсмическим данным для сочетания положения конкретного источника и конкретного приемника со-1 024039 стоит в накоплении результатов свертки трасс в парах по площади поверхности возможных положений точек связи. Однако, как правило, не все пары трасс, подлежащих свертке во всех положениях точек связи, всегда легко могут быть получены с помощью сбора сейсмических данных. Это вызвано недостаточностью выборки положений источников и приемников, особенно в поперечном направлении, что характерно для сбора морских сейсмических данных с использованием буксируемых сейсмических кос. Кроме того, практические ограничения на системы позиционирования и навигации, а также волновые течения,которые вызывают отклонение сейсмических кос и системы наблюдений от курса судна, не позволяют точно позиционировать источники и приемники в требуемых точках. Существует несколько способов, направленных на регуляризацию данных в целях восстановления недостающих данных. Эти способы могут применяться для формирования данных в целях 3-D прогнозирования поверхностно-связанных кратных волн. Такие способы, известные в отрасли, основаны на нормальном приращении времени (NMO, Normal Moveout), полной кинематической поправке за угол наклона отражающей границы (DMO, Dip Moveout) - обратной DMO, кинематической поправке за азимут(АМО, Azimuth Moveout), или операторах миграции. Общее между этими способами заключается в том,что все они направлены на формирование по полученным данным новых данных, более сходных с требуемыми трассами. Таким образом, существует потребность в способе восстановления данных для формирования требуемых трасс по набору полученных трасс для достижения более высокой точности трехмерного прогнозирования поверхностно-связанных кратных волн. Сущность изобретения Настоящее изобретение представляет собой способ ДМО-преобразования (получения поправок за угол наклона) для восстановления информации при трехмерном прогнозировании поверхностносвязанных кратных волн. Для требуемой восстанавливаемой трассы определяется оптимальная трасса в наборе сейсмических данных. Поправку за угол наклона рассчитывают по выборке для разностей азимута, координат общей глубинной точки (ОГТ) и удаления между оптимальной трассой и требуемой трассой. Поправки применяют к оптимальной трассе для восстановления требуемой трассы с целью трехмерного прогнозирования поверхностно-связанных кратных волн. Краткий перечень фигур чертежей Настоящее изобретение и его преимущества легче понять из следующего подробного описания и прилагаемых чертежей. На фиг. 1 представлено схематическое изображение трасс для восстановления информации в целях трехмерного прогнозирования поверхностно-связанных кратных волн согласно способу настоящего изобретения. На фиг. 2 представлена блок-схема, иллюстрирующая вариант осуществления изобретения для ДМО-преобразования с целью восстановления информации при трехмерном прогнозировании поверхностно-связанных кратных волн. На фиг. 3 представлена блок-схема, иллюстрирующая другой вариант осуществления изобретения для ДМО-преобразования с целью восстановления информации при трехмерном прогнозировании поверхностно-связанных кратных волн. Хотя настоящее изобретение будет описано в связи с предпочтительными вариантами осуществления, понятно, что изобретение не ограничивается только ими. Напротив, изобретение предназначено для того, чтобы охватить все альтернативные варианты, модификации и эквиваленты, которые могут быть включены в объем настоящего изобретения согласно прилагаемой формуле изобретения. Сведения, подтверждающие возможность осуществления изобретения В целом, изобретение представляет собой способ преобразования сейсмических данных в данные с подавленными помехами. Конкретно, изобретение представляет собой способ восстановления сейсмических данных с использованием поправок за угол наклона для схем прогнозирования поверхностносвязанных кратных волн. Настоящее изобретение используется на этапе прогнозирования процесса 3D прогнозирования и вычитания для подавления поверхностно-связанных кратных волн в сейсмических данных. Процесс прогнозирования трехмерных поверхностно-связанных кратных волн по сейсмическим данным включает накопление результатов свертки пар трасс по площади поверхности возможных положений точек связи для каждого сочетания положения выбранного источника и положения выбранного приемника. На фиг. 1 представлено схематическое изображение трасс для восстановления информации в целях трехмерного прогнозирования поверхностно-связанных кратных волн согласно способу настоящего изобретения. Положение, при котором поверхностно-связанные кратные волны должны прогнозироваться (и вычитаться) определяется трассой источник-приемник 10. Трасса источник-приемник 10 задана сочетанием положения выбранного источника 11 и положения выбранного приемника 12. Процесс прогнозирования поверхностно-связанных кратных волн по сейсмическим данным для трассы источник-приемник 10 включает выполнение свертки пар трасс с последующим накоплением результатов свертки по площади поверхности 13. Первая трасса в каждой паре свернутых трасс называется трассой связи со стороны источника 14 и имеет положение источника в положении выбранного источника 11 трассы источник-2 024039 приемник 10 и положение приемника в выбранном положении точки связи 15. Вторая трасса 16 в паре называется трассой связи со стороны приемника 16 и имеет положение своего источника в том же выбранном положении точки связи 15, и положение приемника в положении выбранного приемника 12 трассы источник-приемник 10. Точки связи 15 для всех пар трасс связи со стороны источника 14 и трасс связи со стороны приемника 16 распределены по площади поверхности 13. Каждая точка связи 15 соответствует потенциальной точке отражения от поверхности поверхностно-связанных кратных волн, относящихся к этой трассе источник-приемник 10. Трассы, созданные при помощи выполнения свертки пар трасс связи со стороны источника 14 и трасс связи со стороны приемника 16, называются трассами с включением кратных волн,а набор таких трасс с включением кратных волн (до накопления) называется выборкой трасс с включением кратных волн. Накопление трасс с включением кратных волн в виде прогнозируемых поверхностно-связанных кратных волн включает процесс, обычно называемый "суммированием по Френелю". Степень охвата площади поверхности 13 точками отражения от поверхности, учитываемыми (после накопления) при прогнозировании, обычно называется апертурой прогнозирования. Апертуру в простейшем случае можно выбрать в виде прямоугольной площади поверхности 13, окружающей среднюю точку 17 трассы источник-приемник 10 для положения конкретного источника 11 и положения конкретного приемника 12. Прямоугольную площадь поверхности 13 можно параметризовать с помощью продольной линии наблюдения 18 и поперечной линии наблюдения 19. Однако площадь поверхности 13 апертуры необязательно должна быть прямоугольной или ориентированной вдоль линии наблюдения 18 и поперек линии наблюдения 19. Это не ограничивает объем настоящего изобретения, а просто используется для простоты иллюстрирования. Однако, как обсуждалось выше в разделе "Предшествующий уровень техники", не все пары трасс,подлежащих свертке во всех положениях точек связи, всегда легко могут быть получены с помощью сбора морских сейсмических данных. Изобретение представляет собой способ восстановления сейсмических данных с помощью поправок за угол наклона для решения этой проблемы. Необходимая информация об угле наклона относится к локальному геологическому строению и может быть или заранее задана,или определена при восстановлении информации. Традиционный подход состоит в восстановлении требуемых трасс по ближайшим трассам в полученных сейсмических данных. Сейсмические данные выражены в виде где полученные сейсмические данные преобразуются в этот формат при необходимости. ОГТ (общая глубинная точка) определяет координаты х и у точки, находящейся посредине между положениями источника и приемника для данной трассы, которые будут называться координатами ОГТ. Здесь х и у представляют собой ортогональные координаты для сетки обработки, как правило, ориентированные таким образом, что х соответствует продольному направлению, а у - поперечному направлению сейсморазведки, хотя данная ориентация может определяться пользователем. Азимутопределяется здесь как угол между направлением сбора данных (как правило, направлением морского профиля при сборе морских данных) и прямой линией между положениями источника и приемника. Удаление h определяется как полное расстояние между положениями источника и приемника для отдельной трассы. Время вступления t представляет собой время записи волны на трассе. В этом способе в качестве требуемой трассы выбирают лучшую имеющуюся трассу, которая минимизирует разность между оптимальной (ближайшей) и требуемой трассой. Разность Ф представляет собой взвешенную сумму разностей координат х и y ОГТ, удаления h и азимутамежду ближайшей и требуемой трассами, которую можно выразить формулой где ,ипредставляют собой определяемые пользователем веса; а нижние индексы b и d обозначают оптимальную и требуемую трассы соответственно. К сожалению, по причинам, изложенным выше, требуемая трасса с подходящими координатами х и у ОГТ, удалением h и азимутомчасто отсутствует в наборе полученных трасс. Целью традиционного сбора данных часто является такое распределение источников и приемников, что в каждом бине ОГТ,который содержит небольшой диапазон координат х и y ОГТ, и в бине удаления, который содержит небольшой диапазон удалений h, доступна одна трасса. В этом случае только один азимутдоступен для данного сочетания бина ОГТ и бина удаления. Однако минимизация уравнения (1) не ограничивается единственным сочетанием бина ОГТ и бина удаления. Кроме того, некоторые современные типы геометрии сбора данных ставят своей целью получение двух или более трасс, доступных при таком бине ОГТ и положении бина удаления. В подобных случаях для каждого сочетания бина ОГТ и бина удаления доступны две или более трасс, каждая со своим собственным азимутом . Это означает, что при традиционном состоянии техники оптимальную трассу находят путем минимизации разностикак взвешенной суммы только разностей х и у ОГТ и удаления h, игнорируя тем самым азимут . Таким образом, уравнение (1) применяется в сокращенном варианте без заключительного разностного члена . После нахождения оптимальной, или ближайшей трассы, к этой трассе данных применяется разностная кинематическая поправка для коррекции разности удалений между требуемой трассой и оптимальной трассой. Этот оператор разностной кинематической поправки корректирует только разности удалений; он не может вносить поправку за разность азимутов, разность координат х и у ОГТ, или за связанные с удалением разности времен пробега, зависящие от угла наклона, между требуемой трассой и оптимальной трассой. Настоящее изобретение представляет собой способ включения поправок за угол наклона, определяемых и применяемых по трассе и по выборке для азимута, координат ОГТ и связанных с удалением разностей между требуемой трассой и оптимальной трассой, в описанную выше схему восстановления информации. Находят оптимальную трассу, рассчитывают поправки для требуемой и оптимальной трасс на основе информации о местном угле наклона, после чего применяют поправки к оптимальной трассе на каждой выборке. Информация о местном угле наклона относится к локальному геологическому строению и может быть или заранее задана, или определена в ходе применения схемы восстановлении информации по локально доступным данным. Поскольку поправки определяются, а затем применяются по трассе и по выборке, способ настоящего изобретения становится очень эффективным в вычислительном отношении. Таким образом, способ настоящего изобретения фундаментально отличается от подхода к регуляризации данных, описанного в разделе "Предшествующий уровень техники". Способ настоящего изобретения используется для применения поправок за угол наклона при восстановлении информации для 3-D прогнозирования поверхностно-связанных кратных волн. На фиг. 2, 3 представлены блок-схемы, иллюстрирующие варианты осуществления изобретения для ДМО-преобразования (поправок за угол наклона) с целью восстановления информации при трехмерном прогнозировании поверхностно-связанных кратных волн. Фиг. 2 представляет собой блок-схему, иллюстрирующую общий вариант осуществления изобретения. На фиг. 3 представлена блок-схема, иллюстрирующая более подробный вариант осуществления изобретения. На фиг. 2 представлена блок-схема, иллюстрирующая вариант осуществления изобретения для ДМО-преобразования с целью восстановления информации при трехмерном прогнозировании поверхностно-связанных кратных волн. В блоке 20 определяется оптимальная трасса для требуемой трассы, подлежащей восстановлению. В блоке 21 поправку за угол наклона рассчитывают для разностей азимута, координат ОГТ и удаления между оптимальной трассой и требуемой трассой. Поправку рассчитывают для каждой выборки на трассах. В блоке 22 поправку за наклон применяют к оптимальной трассе для восстановления требуемой трассы в целях трехмерного прогнозирования поверхностно-связанных кратных волн. На фиг. 3 представлена блок-схема, иллюстрирующая другой вариант осуществления изобретения для ДМО-преобразования с целью восстановления информации при трехмерном прогнозировании поверхностно-связанных кратных волн. Фиг. 3 представляет собой более подробный вариант осуществления способа, обсуждавшегося со ссылкой на блок-схему на фиг. 2. В блоке 30 морские сейсмические данные получают в формате где полученные сейсмические данные преобразуются в этот формат при необходимости. В блоке 31 для каждой выборки данных из блока 30 с координатами ОГТ хСМР и yCMP и временной выборкой t определяется преобладающий угол наклона по направлениям х и у. Углы наклона могут определяться любым подходящим способом, известным специалистам. Углы наклона могут определяться по любому подходящему подмножеству всего трехмерного массива полученных данных (куба данных),например, такому как массивы равных удалений. С помощью этих определений формируется трехмерный массив данных для оценки угла наклона. Угол наклона представляет собой наклон между двумя соседними трассами в выборке (сейсмограмме) одной и той же сейсмической волны. Угол наклона измеряется как соотношение между временной разностью и пространственной разностью (аналог dt/dx). Угол наклона обычно разлагается на две компоненты, ориентированные вдоль осей х и у сетки, используемой для обработки. Хотя обычно предполагается, что наклонная ось синфазности является негоризонтальной, горизонтальная ось не исключается. Способ настоящего изобретения не ограничивается потребностью оценивать углы наклонов для каждой требуемой трассы, подлежащей восстановлению. В альтернативном варианте осуществления оценивание угла наклона может применяться на разреженной сетке, где оценки углов наклона для промежуточных положений получают путем интерполяции оценок углов наклона, полученных на разреженной сетке. В другом альтернативном варианте осуществления конечное число преобладающих углов наклона может оцениваться для любой выборки данных. Такое оценивание углов наклона кратных волн может осуществляться путем разделения различных компонент угла наклона до его оценивания с помощью хорошо известных способов, таких как f-k (частотно-волновочисленная) фильтрация, или фильтрация Радона, либо используя хорошо известные способы разложения угла наклона, такие как фильтрация в области наклонного суммирования. Окончательно применяемая поправка за наклон будет при этом представлять собой взвешенную сумму отдельных поправок для каждого угла наклона. В блоке 32 фильтр, например медианный фильтр, применяется к кубу данных для оценки угла наклона из блока 31 для сглаживания границ раздела, если требуется. Этот шаг не является обязательным. В блоке 33 выбирают набор трасс, подлежащих восстановлению. Это набор трасс состоит из трасс,которые требуют восстановления для получения требуемых трасс для 3-D прогнозирования поверхностно-связанных кратных волн. В блоке 34 для каждой трассы в множестве трасс из блока 33 определяют оптимальную трассу по сейсмическим данным из блока 30. В одном варианте осуществления эту оптимальную трассу определяют путем применения уравнения (2). Однако это не ограничивает объем настоящего изобретения. В другом варианте осуществления по сейсмическим данным из блока 30 определяют трассу, которая близка к трассе, подлежащей восстановлению, но необязательно является оптимальной, пока поправка за угол наклона не будет применена далее в блоке 36. В блоке 35 поправка за угол наклона определяется для требуемой трассы из блока 33 и оптимальной трассы из блока 34. Поправка за угол наклона представляет разность между оптимальной трассой из блока 34 и подлежащей восстановлению требуемой трассой из блока 33. Поправка применяется к каждой временной выборке t на оптимальной трассе из блока 34. Как обсуждалось выше, поправка может представлять собой взвешенную сумму поправок для каждого угла наклона на выборке данных. В одном варианте осуществления поправка за угол наклона для разностей азимутов определяется исходя из половинного удаления, времени вступления, азимута, медленности, координат ОГТ, угла наклона и направления утла наклона. В одном варианте осуществления используемая поправка за азимутt задается выражением: при этом амплитуда медленности p задается выражением где h' - половинное удаление; t - время вступления; р - медленность; b - азимут оптимальной трассы; d - азимут требуемой трассы; dt/dx - местное падение вдоль координаты х; a dt/dy - местное падение вдоль координаты у. В другом варианте осуществления поправка за угол наклона для разностей удалений определяется исходя из половинного удаления, времени вступления, азимута, медленности, угла наклона и направления угла наклона. В одном варианте осуществления используемая поправка за удаление th задается выражением где h'd - это половинное удаление требуемой трассы; a h'=h'b-h'd - разность между половинными удалениями оптимальной трассы и требуемой трассы. В другом варианте осуществления поправка за угол наклона для разностей положения ОГТ определяется исходя из координат ОГТ, медленности, угла наклона и направления угла наклона. В одном варианте осуществления поправка за положение ОГТ tcmp задается выражением при этом разность координат x ОГТxCMP задается выражением а разность координат y ОГТyCMP задается выражением: В другом варианте осуществления используемая поправка за угол наклона определяется по сочетанию поправок для отдельных разностей между оптимальной трассой и требуемой трассой. В блоке 36 поправку за угол наклона из блока 35 применяют к оптимальной трассе из блока 34 для восстановления соответствующей требуемой трассы в целях трехмерного прогнозирования поверхност-5 024039 но-связанных кратных волн. Поправочный коэффициент применяется по трассе и по выборке после выбора оптимальной трассы. В результате, данный способ очень эффективен в вычислительном отношении. Кроме того, поправка за угол наклона, определяемая по способу настоящего изобретения, не зависит от скоростей распространения волновых полей, и, таким образом, приведенные выше уравнения (3),(6) и (7) не требуют никаких априорных сведений. Вместе с тем, этот независимый от скорости подход является возможным преимуществом, но не требует ограничения объема настоящего изобретения. В других вариантах осуществления могли бы быть выведены другие уравнения, обеспечивающие достижение такого же эффекта, поправки за угол наклона, которые, однако, потребовали бы более подробной информации о геологической среде, например о скоростях распространения волновых полей. Так, для определения поправки за азимут t можно было бы применить следующее уравнение: где h' - это половинное удаление,- скорость среды, t - время прибытия,- угол наклона,- азимут линии источник-приемник, а- направление угла наклона. Нижние индексы b и d относятся к оптимальной и требуемой трассам соответственно. В другом варианте осуществления для определения поправки за удаление th можно было бы применить следующее уравнение: где h' = h'b-h'd - это разность между половинными удалениями. В другом варианте осуществления для определения поправки за положение ОГТtcmp можно было бы применить следующее уравнение: где xCMP - это разность координат х между положениями ОГТ, а yCMP - разность координат у между положениями ОГТ. В другом варианте осуществления для определения поправки за положение ОГТ tcmp можно было бы применить следующее уравнение: В другом варианте осуществления способ настоящего изобретения может также использоваться в процессе прогнозирования межслойных кратных волн, а не поверхностно-связанных кратных волн. При 3D прогнозировании межслойных кратных волн (IMP, Interbed Multiple Prediction), вместо двух трасс и одной свертки, как в способе 3D SRMP, используются тройка трасс и две свертки как составная часть данного способа. Способ изобретения может применяться в целях восстановления недостающих данных для каждой из двух сверток. Настоящее изобретение обсуждалось выше как способ только в целях иллюстрации, но оно может также быть реализовано в виде системы. Система в соответствии с настоящим изобретением предпочтительно реализуется посредством компьютеров, конкретно, цифровых компьютеров, наряду с использованием традиционного оборудования для обработки данных. Такое оборудование для обработки данных,хорошо известное специалистам, будет состоять из любой подходящей комбинации или сети оборудования для компьютерной обработки, включая, без ограничений, аппаратное обеспечение (процессоры, устройства временного и постоянного хранения и любое иное оборудование для компьютерной обработки),программное обеспечение (операционные системы, прикладные программы, библиотеки программ математических расчетов и любое иное подходящее программное обеспечение), схемы соединений (электрические, оптические, беспроводные и другие) и периферийное оборудование (входные и выходные устройства, такие как клавиатуры, позиционирующие устройства и сканеры; устройства отображения, такие как мониторы и принтеры; машиночитаемые накопители, такие как ленты, диски, накопители на жестких дисках и любое иное подходящее оборудование). В другом варианте осуществления настоящее изобретение может быть реализовано в виде описанного выше способа, специально выполненного с помощью программируемого компьютера для применения этого способа. В другом варианте осуществления настоящее изобретение может быть реализовано в виде компьютерной программы, хранящейся на машиночитаемом носителе, при этом логика программы позволяет задавать последовательность действий программируемого компьютера для применения описанного выше способа. В другом варианте осуществления настоящее изобретение может быть реализовано в виде машиночитаемого носителя с хранящейся на нем компьютерной программой, при этом логика программы позволяет задавать последовательность действий программируемого компьютера для применения описанного выше способа. Следует понимать, что изложенное выше представляет собой просто подробное описание конкретных вариантов осуществления настоящего изобретения, и что многочисленные изменения, модификации и варианты осуществления, альтернативные изложенным, могут быть выполнены в соответствии с раскрытым изобретением без выхода за его рамки. Поэтому предшествующее описание не ограничивает объем настоящего изобретения. Объем изобретения определяется только прилагаемой формулой изобретения и ее эквивалентами. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ морской сейсморазведки, включающий восстановление морских сейсмических данных для трехмерного прогнозирования поверхностно-связанных кратных волн, содержащий следующие шаги: определение ближайшей трассы в наборе сейсмических данных для требуемой восстанавливаемой трассы; рассчитывание поправки за угол наклона по трассе и по выборке данных для разностей азимута, координат общей глубинной точки и удаления между ближайшей трассой и требуемой трассой; применение поправки за угол наклона к ближайшей трассе для восстановления требуемой трассы с целью трехмерного прогнозирования поверхностно-связанных кратных волн. 2. Способ по п.1, отличающийся тем, что определение ближайшей трассы включает следующие шаги: получение сейсмических данных в формате (xCMP, yCMP, h, , t); определение преобладающего угла наклона по направлениям х и у для координат общей глубинной точки xCMP и yCMP и время вступления t на каждой трассе в сейсмических данных; применение фильтра к углам наклона для сглаживания границ раздела; выбор набора требуемых трасс для восстановления; определение ближайшей трассы по сейсмическим данным для каждой требуемой трассы в выбранном наборе трасс. 3. Способ по п.2, отличающийся тем, что применяемый фильтр представляет собой медианный фильтр. 4. Способ по п.2, отличающийся тем, что определение ближайшей трассы включает минимизацию разности , которая представляет собой взвешенную сумму разностей координат х и у общей глубинной точки xCMP и yCMP, удаления h и азимутамежду ближайшей и требуемой трассами. 5. Способ по п.4, отличающийся тем, что минимизация разностивключает применение следующего уравнения: где ,ипредставляют собой определяемые пользователем веса; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно. 6. Способ по п.4, отличающийся тем, что минимизация разностивключает применение следующего уравнения: гдеипредставляют собой определяемые пользователем веса; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно. 7. Способ по п.1, отличающийся тем, что расчет поправки за угол наклона содержит расчет поправки за угол наклона для ближайшей трассы и соответствующей требуемой трассы исходя из половинного удаления, азимута, времени вступления, медленности, координат общей глубинной точки, угла наклона и направления угла наклона. 8. Способ по п.7, отличающийся тем, что расчет поправки за угол наклона для разностей азимутов включает применение следующего уравнения: сы соответственно. 9. Способ по п.7, отличающийся тем, что расчет поправки за угол наклона для разностей удалений включает применение следующего уравнения:d обозначают ближайшую и требуемую трассы соответственно. 10. Способ по п.7, отличающийся тем, что расчет поправки за угол наклона для разностей положений общей глубинной точки включает применение следующего уравнения: где р - медленность;- направление угла наклона; xCMP=xbCMP-xdCMP - разность координат х между положениями общей глубинной точки; yCMP=ybCMP-ydCMP - разность координат у между положениями общей глубинной точки; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно. 11. Способ по п.1, отличающийся тем, что расчет поправки за угол наклона содержит расчет поправки за угол наклона для ближайшей трассы и соответствующей требуемой трассы исходя из половинного удаления, азимута, времени вступления, скорости, координат общей глубинной точки, угла наклона и направления угла наклона. 12. Способ по п.11, отличающийся тем, что расчет поправки за угол наклона для разностей азимутов включает применение следующего уравнения: где h' - половинное удаление;- скорость среды; t - время вступления;- угол наклона;- азимут линии источник-приемник;- направление угла наклона; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно. 13. Способ по п.11, отличающийся тем, что расчет поправки за угол наклона для разностей удалений включает применение следующего уравнения: где- скорость среды; t - время вступления; h' - половинное удаление; h'=h'b-h'd - разность половинных удалений;- угол наклона;- азимут линии источник-приемник;- направление угла наклона; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно. 14. Способ по п.11, отличающийся тем, что расчет поправки за угол наклона для разностей общих глубинных точек включает применение следующего уравнения: где- скорость;- угол наклона; xCMP=xbCMP-xdCMP - разность координат х между положениями общей глубинной точки; yCMP=ybCMP-ydCMP - разность координат у между положениями общей глубинной точки,- направление угла наклона; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно. 15. Способ по п.11, отличающийся тем, что расчет поправки за угол наклона для разностей общих глубинных точек включает применение следующего уравнения: где- угол наклона;- скорость; t - время вступления; h' - половинное вступление;- азимут линии источник-приемник; xCMP=xbCMP-xdCMP - разность координат х между положениями общей глубинной точки; yCMP=ybCMP-ydCMP - разность координат y между положениями общей глубинной точки;направление угла наклона; а нижние индексы b и d обозначают ближайшую и требуемую трассы соответственно.
МПК / Метки
МПК: G01V 1/38, G01V 1/32, G01V 1/28
Метки: прогнозировании, трехмерном, кратных, информации, волн, восстановления, дмо-преобразование, поверхностных
Код ссылки
<a href="https://eas.patents.su/10-24039-dmo-preobrazovanie-dlya-vosstanovleniya-informacii-pri-trehmernom-prognozirovanii-poverhnostnyh-kratnyh-voln.html" rel="bookmark" title="База патентов Евразийского Союза">Дмо-преобразование для восстановления информации при трехмерном прогнозировании поверхностных кратных волн</a>
Способ динамического определения апертуры для трехмерного подавления поверхностно-связанных кратных волн
Номер патента: 23300
Опубликовано: 31.05.2016
Авторы: Хеге Робертус Ф., Ван Борселен Роальд Дж.
Метки: определения, поверхностно-связанных, кратных, волн, трехмерного, подавления, способ, апертуры, динамического
Формула / Реферат:
1. Способ морской сейсморазведки, включающий следующие шаги:рассчитывают углы наклона вдоль поперечных волн соседних трасс с включением кратных волн по сейсмическим данным, полученным с помощью размещения ряда сейсмических датчиков, ближайших к оцениваемой области геологической среды, причем сейсмические датчики формируют электрический и/или оптический сигнал в ответ на сейсмическую волну вблизи от границы апертуры выборки трасс с включением...
Способ предсказания кратных волн, связанных с поверхностью, на основе данных буксируемой морской сейсмической косы с двумя типами датчиков
Номер патента: 12636
Опубликовано: 30.12.2009
Автор: Зёлльнер Вальтер
МПК: G01V 1/28
Метки: предсказания, данных, морской, косы, датчиков, волн, способ, сейсмической, связанных, типами, кратных, двумя, буксируемой, основе, поверхностью
Формула / Реферат:
1. Способ обработки сейсмических данных, полученных посредством буксируемой морской сейсмической косы, содержащей датчики движения сейсмической массы и датчики давления, состоящий в том, что комбинируют сигналы датчиков движения сейсмической массы и сигналы датчиков давления для образования восходящей составляющей волнового поля давления и падающей составляющей волнового поля движения сейсмической массы; экстраполируют падающую составляющую...
Однофазный однонаправленный преобразователь поверхностных акустических волн и усовершенствованные отражатели
Номер патента: 10995
Опубликовано: 30.12.2008
Авторы: Плесски Виктор П., Хартманн Клинтон С.
МПК: H03H 9/25
Метки: поверхностных, однонаправленный, акустических, усовершенствованные, волн, преобразователь, отражатели, однофазный
Формула / Реферат:
1. Устройство на поверхностных акустических волнах (ПАВ), имеющее определенный участок на пьезоэлектрической подложке, в пределах которого расположен разомкнутый отражатель, перпендикулярный направлению распространения ПАВ; и пару электродов преобразователя с низкой отражательной способностью, расположенных в пределах упомянутого определенного участка и подключенных к противоположных шинам, причем эти электроды перпендикулярны направлению...
Способ сопоставления первого и второго наборов данных сейсморазведки методом отраженных волн с временным сдвигом отраженных волн
Номер патента: 20279
Опубликовано: 30.10.2014
Автор: Ли Эспен Оэн
МПК: G01V 1/28
Метки: временным, способ, отраженных, второго, первого, сдвигом, волн, сопоставления, данных, сейсморазведки, методоm, наборов
Формула / Реферат:
1. Способ определения временных сдвигов (22) для обнаружения изменений среды в нефтегазоносных пластах во время нефтедобычи, содержащий этапы, на которыхопределяют первый набор (10) данных сейсморазведки методом отраженных волн из первых трасс (1) отраженных волн, содержащий первую последовательность отраженных волн (11), полученную в первый момент времени (t0),определяют второй набор (30) данных сейсморазведки методом отраженных волн из вторых...
Способ и устройство для анализа обменных волн
Номер патента: 4003
Опубликовано: 25.12.2003
Авторы: Ванг Вейжонг, Брзостовски Мэтью А., Алтан Суат, Жу Ксианхуай
МПК: G01V 1/28
Метки: обменных, устройство, анализа, способ, волн
Формула / Реферат:
1. Способ обработки сейсмических данных с обменными волнами, включающий следующие операции: формирование из сейсмических данных сборки обменных волн с нулевым выносом, в которой до минимума сокращены временные сдвиги за счёт введения кинематических поправок; миграция упомянутой сборки, по существу, не зависящая от скорости; скоростной анализ полученной мигрированной сборки и введение кинематических поправок в упомянутую мигрированную сборку с...
Предыдущий патент: Производные нитрила, их использование в фармацевтических целях и в композициях
Следующий патент: Способ получения продукта из биомассы
Случайный патент: Способ увеличения количества молока и/или мяса животных, которых кормят силосом